Изобретение относится к снаряжению водолаза и может быть использовано как элемент в составе средств связи, управления и контроля при выполнении подводно-технических работ, при действиях, относящихся к военной сфере, при аварийных ситуациях, а также аквалангистами-любителями.
При нахождении в водной среде на дистанциях в десятки и сотни метров от обеспечивающего надводного судна единственным средством связи водолаза является связь по гидроакустическому каналу. Одним из важнейших элементов этой связи является система, дающая возможность водолазу определить направление на источник гидроакустического (звукового) сигнала. Источником такого сигнала может быть сигнал излучения с обеспечителя, от специального гидроакустического маяка или от другого водолаза при групповых действиях. Определение направления на источник звукового сигнала реализуется с помощью гидроакустического пеленгатора водолаза, которое входит в состав его снаряжения.
К пеленгатору водолаза предъявляются два основных требования:
- пеленгатор должен полностью, со всеми составляющими частями, интегрироваться в носимое водолазом снаряжение, не создавая дополнительных неудобств при выполнении работ;
- точность определения направления на источник сигнала должна быть достаточной для однозначного выбора этого направления и составлять величину 15-20° [1].
Пеленгатор должен работать в диапазоне частот, соответствующем диапазону частот сигналов, используемых водолазами 8-35 кГц.
Для создания характеристики направленности (ХН), обеспечивающей необходимую точность пеленгования, размер раскрыва акустической антенны должен составлять примерно (2…3)λ (λ - длина волны рабочей частоты пеленгуемого сигнала), т.е. для указанных выше частот от 9 см (f=25 кГц) до 37,5 см (f=8 кГц). Даже если удастся разместить антенну необходимого размера на теле водолаза, осуществить пеленгование в двух плоскостях будет затруднительно.
Известны способы и устройства, которые частично решают задачи пеленгатора для водолазов.
Так, в устройстве по патенту США [2] система водолазного снаряжения, решающая задачи навигации, размещается на шлеме и имеет радиоэлектронные и компьютерные средства, включая дисплей, на который выводятся данные, необходимые водолазу, при этом водолаз может определить свое положение относительно источников сигнала только при наличии внешней системы на обеспечивающем судне. Эта система, в свою очередь, должна иметь достаточно точные данные о местонахождении водолаза.
В патенте США [3] на шлеме водолаза устанавливается несколько приемников, составляющих фазированную антенную решетку (ФАР). Расположение ФАР с необходимой направленностью в пределах шлема вряд ли возможно для работы на частотах ниже 15 кГц. Кроме того, с помощью линейной ФАР можно обеспечить направленность только в одной плоскости, а многоканальная система обработки значительно усложняется.
В Полезной модели [4] предлагается реализовать корреляционную обработку сигналов от двух антенн, но ХН формируется только в горизонтальной плоскости, а в вертикальной плоскости система является ненаправленной.
Наиболее близким по техническим и функциональным характеристикам к предлагаемым устройству и способу является «Пеленгатор водолаза» по заявке [5]. Это устройство, а также способ пеленгования с помощью указанного устройства приняты за прототип.
Устройство-прототип состоит их двух идентичных каналов, каждый из которых содержит последовательно соединенные направленную акустическую антенну, усилитель с автоматической регулировкой усиления (АРУ) и головной телефон. Антенны направлены в левую и правую полусферы относительно продольной оси водолаза и укреплены на теле (шлеме) водолаза. Выходы антенн подключены к входам устройства выбора максимального сигнала, а выход этого устройства подключен к управляющим входам усилителей с АРУ каналов устройства-прототипа. Коэффициент усиления усилителей с АРУ становится максимальным, если уровни сигналов на обоих входах усилителя (сигнального и управляющего) одинаковы. В том канале, где уровень сигнала с акустической антенной меньше, будет меньше и коэффициент усиления усилителя и, следовательно, в этом канале на соответствующий головной телефон будет поступать сигнал меньшего уровня, чем на другой. Предполагается, что водолаз сравнивает звуковые сигналы в головных телефонах и поворачивается до тех пор, пока сигналы в обоих каналах не уравняются. Так водолаз определяет направление на источник сигнала.
Устройство-прототип [5] имеет ряд недостатков:
- как уже указывалось, реализация направленного приема требует большого размера раскрыва приемной антенны; минимальной направленностью обладает антенна с ХН типа полусферы, но и реализация акустической антенны с ХН в виде полусферы требует большой площади экранирующей поверхности (до десяти длин волн на частоте пеленгуемого сигнала) [6];
- в случае ХН типа полусфера устройство-прототип обеспечивают пеленгование источника сигнала принципиально с точностью до плоскости, перпендикулярной линии, соединяющей центры антенн, но источник сигнала может находиться выше/ниже водолаза, и такая локализация невозможна;
- чувствительность каждого уха водолаза может быть различной, в том числе по частоте, необходима дополнительная подстройка амплитудно-частотной характеристики каждого канала под конкретного пользователя.
Техническим результатом предлагаемого устройства и способа его использования является
- возможность пеленгования водолазом источника звукового сигнала, приходящего с любого направления в пространстве (по двум угловым координатам);
- уменьшение габаритов акустических антенн, в результате чего они могут легко размещаться на шлеме водолаза;
- отказ от использования бинаурального эффекта, т.е. от сопоставления сигналов, приходящих на каждое ухо водолаза;
- уменьшение объема аппаратуры - использование только одного усилителя с АРУ и одного телефона.
Для достижения заявляемого технического результата в устройстве определения водолазом направления на источник звукового сигнала (ИЗС), содержащем две (акустические) антенны, тракт прослушивания принимаемых сигналов, включающий последовательно соединенные первую антенну, усилитель с автоматической регулировкой усиления и головной телефон, а также тракт формирования управляющего напряжения для усилителя с АРУ, введены новые признаки:
- антенны выполнены ненаправленными;
- центры антенн размещены на расстоянии четверти длины волны несущей частоты принимаемого сигнала;
- тракт формирования управляющего напряжения для усилителя с АРУ состоит из устройства задержки сигнала на время, равное четверти периода несущей частоты принимаемого сигнала, и сумматора;
- выход первой антенны соединен с сигнальным входом усилителя с АРУ и с первым входом сумматора;
- вторая антенна последовательно соединена с устройством задержки и вторым входом сумматора;
- выход сумматора подключен к управляющему входу усилителя с АРУ, коэффициент усиления которого выполнен обратно пропорциональным уровню управляющего сигнала.
Для удобства пеленгования источника звукового сигнала первая антенна расположена на шлеме водолаза на линии от носа к затылку со стороны носа.
В способе определения водолазом направления на источник звукового сигнала (ИЗС), состоящем в регистрации водолазом уровня сигнала, основанном на приеме сигнала ИЗС двумя разнесенными в пространстве антеннами и принятии решения о направлении на ИЗС, введены новые признаки:
- сигнал с выхода второй антенны задерживают на время, равное четверти периода несущей частоты принимаемого сигнала (τ=T/4);
- задержанный сигнал суммируют с сигналом, принимаемым с выхода первой антенны;
- для принятия решения о направлении на источник звукового сигнала используют сигнал, принимаемый первой антенной, причем уровень этого сигнала изменяют обратно пропорционально значению уровня суммарного сигнала;
- изменяют пространственное положение условной линии, соединяющей центры антенн изменением в пространстве положения водолаза до достижения максимального значения уровня регистрируемого водолазом сигнала;
- определяют направление на ИЗС как направление вектора от точки расположения второй антенны к точке расположения первой антенны.
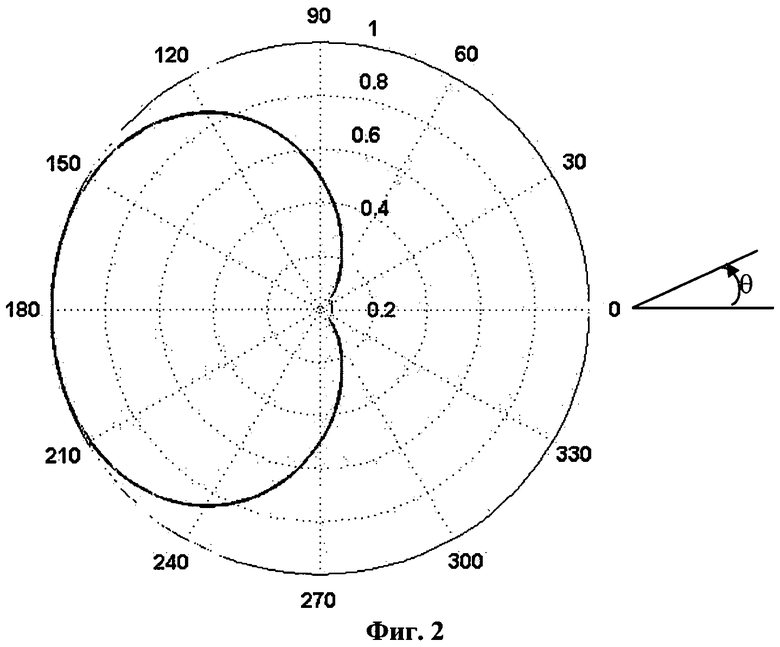
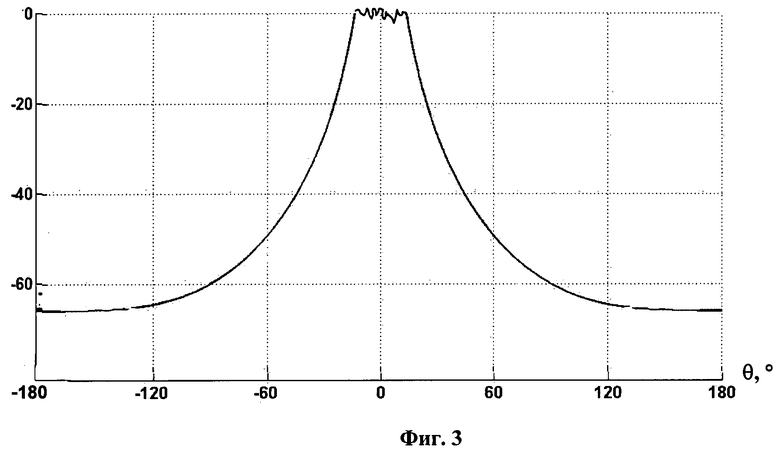
Сущность изобретения поясняется фиг.1-3. На фиг.1 представлена обобщенная функциональная схема заявляемого устройства; на фиг.2 показана характеристика направленности, которая формируется после сумматора; на фиг.3 показана результирующая ХН, представляющая с точностью до постоянной угловое распределение сигнала, прослушиваемого водолазом.
Предлагаемое устройство (фиг.1) состоит из ненаправленных акустических антенн 1, 2, которые обозначены A1 и A2; антенны размещены на расстоянии λ/4. Конструктивно антенны, выполненные каждая в виде ненаправленного гидрофона, могут располагаться на шлеме водолаза, выше поверхности шлема, чтобы уменьшить влияние дифракции. Выход антенны A2 соединен трактом 3 формирования управляющего напряжения для усилителя с АРУ, который включает устройство 4 задержки (обозначено на фиг.1 как τ), последовательно соединенное со вторым входом сумматора 5 (обозначен Σ); выход антенны A2 соединен с сигнальным входом усилителя 6 с АРУ и с первым входом сумматора 5. Выход сумматора соединен с управляющим входом усилителя 6, а выход усилителя - с головным телефоном 7 водолаза. Все входящие в состав устройства узлы, изображенные на фиг.1, известны [1, 6].
Работу устройства и действия по заявляемому способу пеленгования целесообразно рассматривать совместно.
Пусть сигнал источника звука, имеющий несущую частоту f, приходит с направления, как показано двойной стрелкой на фиг.1. Идентичные антенны A1 и A2 являются ненаправленными (экранирование телом водолаза в данном случае не учитывается), поэтому сигнал, приходящий с любого направления в пространстве, будет восприниматься водолазом. Для улучшения формирования всенаправленной ХН гидрофоны, из которых состоят антенны, могут быть приподняты над шлемом водолаза. Расстояние между антеннами равняется λ/4, поэтому сдвиг по фазе в соответствии с [6] между сигналами, приходящими на антенны A1,2, будет kd cosθ, где k=π/λ=2πf/c, c - скорость звука в воде; d - расстояние, равное λ/4; θ - угол между линией, соединяющей центры антенн, и направлением на источник сигнала (для случая, показанного на фиг.1, 3, θ=0). Таким образом, сдвиг по фазе между сигналами на выходах антенн будет  .
.
Сигнал от антенны A1 поступает на сигнальный вход усилителя 6 с АРУ, а сигнал от антенны А2 сдвигается на время f=T/4, T=1/f; что дает дополнительный сдвиг по фазе Δφ1=2πft=2πfT/4=π/2. На первый вход сумматора 5 поступает сигнал с фазой φ1=0, а на второй вход - сигнал, сдвинутый по фазе на угол φ2=π(1+cosθ)/2. После суммирования этих сигналов на выходе сумматора будет сигнал, угловое распределение которого описывается ХН

и имеет форму кардиоиды [6] (фиг.2). Ось кардиоиды лежит на линии, соединяющей центры антенн, а максимум обращен в сторону, в которую направлен вектор от антенны 1 к антенне 2. Ноль кардиоиды обращен в противоположную сторону, в приведенном на фиг.2 примере «0» кардиоиды обращен в сторону прихода сигнала.
Сигнал, описываемый выражением (1), поступает на управляющий вход усилителя 6 с АРУ, а на сигнальный вход усилителя 6 сигнал поступает с антенны A1 1. Коэффициент усиления усилителя 6 такой, что чем больше уровень управляющего сигнала, тем меньше уровень сигнала на входе телефона 7. Следовательно, ХН выходного сигнала с усилителя 6 можно представить функцией («обратная кардиоида»)

На фиг.2 изображена идеальная кардиоида. При направлении θ=0 функция RАРУ(θ) вырождается в δ-функцию и значение функции (2) должно быть бесконечным. В реальной помехосигнальной ситуации присутствуют дестабилизирующие факторы (шумы и помехи различного происхождения), поэтому уровень кардиоиды (1) в направлении θ=0 R(θ)|θ=0≠0, т.е. имеет место «заплывание» нуля ХН. Обратная функция RАРУ(θ), соответственно, при θ=0 не будет иметь вид δ-функции, а будет ограничена по величине, что показано на фиг.3.
Из фиг.3 видно, что угловое распределение сигнала, приходящего на телефон водолаза, зависит от направления прихода сигнала и имеет ярко выраженный максимум в направлении θ=0 по линии, совпадающей с линией, соединяющей центры антенн A1 и А2, причем вектор направления на источник сигнала совпадает с вектором, проходящим от центра антенны A2 к центру антенны A1.
При отсутствии сигнала водолаз прослушивает шум окружающей среды, который может считаться изотропным. При наличии сигнала водолаз поворачивает шлем до достижения максимального уровня сигнала в телефоне. В зависимости от взаимного расположения антенн (от лица к спине или вдоль линии плеч водолаза) водолаз поворачивается лицом (боком), пеленгуя источник звукового сигнала.
Из вида функций (1) и (2) следует, что ХН является симметричной функцией по углу θ, а в сечении перпендикулярной плоскостью ХН типа (2) дает окружность. ХН (2) образует в пространстве геометрическую фигуру типа «конус», т.е. является однонаправленной, вырезая в пространстве угловой сегмент, ось которого соответствует направлению максимума. Сигнал к водолазу может приходить с любого направления, в том числе сверху или снизу, но и водолаз, снабженный заявленным устройством, имеет возможность однозначно определить направление на источник сигнала с точностью до ширины «конуса», а не в пределах полусферы, как предлагается в прототипе.
Расчеты показывают, что в условиях реальной помехи точность определения направления на источник сигнала составляет 10-15° (полуширина ХН по уровню -3 дБ). Диаметр гидрофонов на частоты диапазона, которые приняты для водолазов, составляет 30-50 мм, вес с арматурой 100-200 г (в воздухе).
Таким образом, достигается заявленный технический эффект, заключающийся в однозначном пеленговании источника звукового сигнала, приходящего с любого направления, с приемлемой для водолазных работ точностью [1] и с практической возможностью реализации при комплектации водолазного снаряжения. Дополнительно можно указать, что при использовании только одного телефона для пеленгования (а не наушников с двумя телефонами на каждое ухо) на второе ухо водолаза может быть выведен телефон от другого устройства, не пеленгатора.
Изобретение может быть использовано при подводно-технических, аварийно-спасательных, исследовательских работах, по военной тематике, а также для «приведения» водолаза на судно-обеспечитель или на другой объект, для взаимного ориентирования при работе в группе, в условиях плохой видимости, подо льдом.
Источники информации
1. Занин В.Ю., Малюзенко Н.Н., Чебыкин О.В. Снаряжение подводного пловца. СПб: изд-во «Макет», 1997.
2. Пат США №2002109601. Scuba diver communication and tracking device (Шлемофонная система связи водолаза и устройство для навигации). МПК G08B 13/14. Публ. 15.08.2002.
3. Пат США №6272073. Underwater location and communication device (Прибор для подводной связи и ориентации). МПК H04B 11/00. Публ. 07.08.2001.
4. Свидетельство РФ на полезную модель №43370. Пеленгатор водолаза. МПК G01S 3/80. Публ. 16.01.2005.
5. Заявка №2002111457. Пеленгатор для водолаза. МПК G01S 3/80. Публ. 10.11.2003 (ПРОТОТИП).
6. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Л.: Судостроение, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ С РЕЧЕВЫМ ИНТЕРФЕЙСОМ ОПРЕДЕЛЕНИЯ ВОДОЛАЗОМ НАПРАВЛЕНИЯ НА ИСТОЧНИК ТОНАЛЬНОГО ЗВУКОВОГО СИГНАЛА | 2011 |
|
RU2474837C1 |
| Малогабаритный пеленгатор гидроакустических сигналов | 2022 |
|
RU2793149C1 |
| Пеленгатор гидроакустических сигналов, формирующий статический веер пространственных каналов | 2023 |
|
RU2810695C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| ПЕЛЕНГАТОР ВОДОЛАЗА | 2012 |
|
RU2494914C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2154286C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА | 2006 |
|
RU2323449C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2201599C1 |
Изобретение относится к снаряжению водолаза, может быть использовано в составе средств связи и управления при выполнении подводно-технических работ, в военной сфере, при аварийных ситуациях. Сигнал источника принимается на две ненаправленные антенны, расстояние между которыми λ/4. Сигнал от первой из антенн подается на вход усилителя с автоматической регулировкой усиления, а сигнал от другой антенны задерживается на четверть периода и суммируется с сигналом первой антенны. В результате суммирования формируется характеристика направленности типа кардиоида. Суммированный сигнал подается на управляющий вход усилителя с АРУ, коэффициент усиления которого обратно пропорционален уровню сигнала управления. В результате на головной телефон водолаза поступает сигнал, который становится максимальным, если водолаз разворачивается так, что линия, соединяющая вторую и первую антенны, разворачивается в направлении на источник. Техническим результатом изобретения является расширение функциональных возможностей, упрощение и уменьшение габаритов аппаратуры. 2 н. и 1 з.п. ф-лы, 3 ил.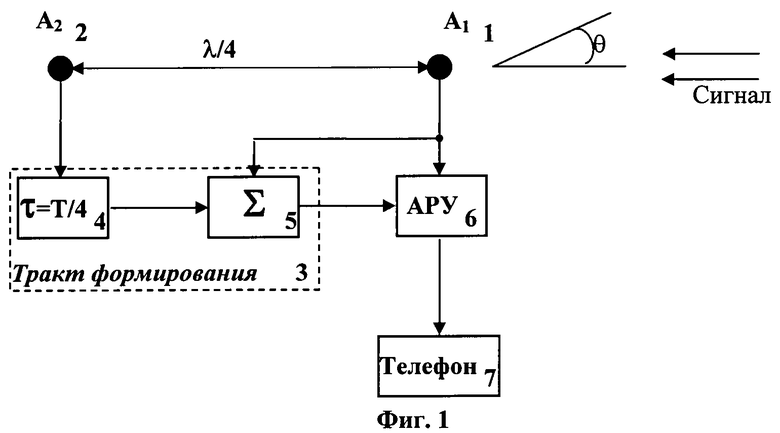
1. Устройство определения водолазом направления на источник звукового сигнала, содержащее две антенны, тракт прослушивания принимаемых сигналов, включающий последовательно соединенные первую антенну, усилитель с автоматической регулировкой усиления (АРУ) и головной телефон, а также тракт формирования управляющего напряжения для усилителя с АРУ, отличающееся тем, что обе антенны выполнены ненаправленными, центры антенн размещены на расстоянии четверти длины волны несущей частоты принимаемого сигнала, тракт формирования управляющего напряжения для усилителя с АРУ состоит из устройства задержки на время, равное четверти периода несущей частоты принимаемого сигнала, и сумматора, причем выход второй антенны подключен к входу устройства задержки, выход первой антенны, соединенный с сигнальным входом усилителя с АРУ, подключен также к первому входу сумматора, выход устройства задержки подключен к второму входу сумматора, выход сумматора подключен к управляющему входу усилителя с АРУ, а коэффициент усиления усилителя с АРУ обратно пропорционален уровню управляющего сигнала.
2. Устройство по п.1, отличающееся тем, что первая антенна расположена на шлеме водолаза на линии от носа к затылку со стороны носа.
3. Способ определения водолазом направления на источник звукового сигнала (ИЗС), состоящий в регистрации водолазом уровня сигнала, основанный на приеме сигнала ИЗС двумя разнесенными в пространстве антеннами и принятии решения о направлении на ИЗС, отличающийся тем, что антенны выполнены ненаправленными и разнесены в пространстве на расстояние, равное четверти длины волны несущей частоты принимаемого сигнала, при этом сигнал с выхода второй антенны задерживают на время, равное четверти периода несущей частоты принимаемого сигнала, суммируют с сигналом с выхода первой антенны, а для принятия решения о направлении на ИЗС используют сигнал, принимаемый первой антенной, причем уровень этого сигнала изменяют обратно пропорционально значению уровня суммарного сигнала, изменяют пространственное положение условной линии, соединяющей центры антенн изменением положения водолаза в пространстве до достижения максимального значения уровня регистрируемого водолазом сигнала, и направление на ИЗС определяют как направление вектора от точки расположения второй антенны к точке расположения первой антенны.
| RU 2002111457 А, 10.11.2003 | |||
| Устройство для разъединения штанг с колонковой трубы | 1934 |
|
SU43370A1 |
| УСТРОЙСТВО МЕЖЕРИЧЕРА ДЛЯ ОРИЕНТИРОВАНИЯ ВОДОЛАЗА ПО ЗВУКУ | 1990 |
|
RU2021163C1 |
| RU 2006137530 A, 27.04.2008 | |||
| US 5666326 A, 09.09.1997 | |||
| Способ восстановления плодородия деградированной почвы | 2024 |
|
RU2830708C1 |

