Данное изобретение относится к способу управления системой фар для транспортного средства, содержащей правый и левый блоки фары, в котором для функции ближнего света оптические оси блоков фар поворачивают горизонтально друг от друга относительно параллельной ориентации. Кроме того, изобретение относится к системе фар для транспортного средства, содержащей правый и левый блоки фары и по меньшей мере одно управляющее устройство, при этом управляющее устройство предназначено для поворота горизонтально друг от друга оптических осей блоков фар относительно параллельной ориентации для обеспечения функции ближнего света.
Система фар транспортного средства имеет задачу возможно лучшего освещения зоны движения в темноте. Для этого имеется обычно функция дальнего света, которая обеспечивает распределение света с очень большой дальностью действия. Однако при функции дальнего света возникает проблема ослепления других участников движения, в частности водителей встречных или движущихся впереди транспортных средств, излучением дальнего света. Поэтому система фар обычно обеспечивает дополнительно функцию ближнего света, распределение света в которой, хотя и обеспечивает возможно более полное освещение зоны движения перед транспортным средством, но не приводит одновременно к ослеплению других участников движения.
Водитель транспортного средства обычно переключает вручную между функцией дальнего света и функцией ближнего света и обратно. Однако это требует высокой концентрации водителя и может приводить к отвлечению от другой влияющей на безопасность информации. Поэтому были разработаны системы фар, с помощью которых обнаруживаются участники движения в направлении излучения света системы фар и согласовывается общее распределение света системы фар с положением обнаруженного участника движения так, что он больше не ослепляется. Например, в WO 2008/037388 A2 раскрыт способ управления системой фар для транспортного средства, в котором направления излучения световых лучей блоков фар для функции ближнего света горизонтально поворачивают друг от друга, с целью уменьшения ослепления другого обнаруженного участника движения.
Задачей данного изобретения является создание способа управления системой фар и системы фар для транспортного средства, с помощью которых водителю транспортного средства обеспечивается возможно более хорошая видимость лежащей перед ним дороги и одновременно эффективно предотвращается ослепление других участников движения.
Эта задача решена, согласно изобретению, с помощью способа с признаками пункта 1 формулы изобретения и системы фар с признаками пункта 8 формулы изобретения. Предпочтительные варианты выполнения и модификации следуют из зависимых пунктов формулы изобретения.
В способе, согласно изобретению, для функции дальнего света оптические оси блоков фар поворачивают горизонтально друг к другу относительно параллельной ориентации. Таким образом, оптические оси блоков фар пересекаются на определенном расстоянии перед транспортным средством. Они не расходятся, как при угле поворота для функции ближнего света.
Под функцией ближнего света понимается в смысле изобретения распределение света, с помощью которого предотвращается ослепление других участников движения. При этом под функцией ближнего света понимается не только традиционный ближний свет, но и традиционный дальний свет, распределение света которого изменяется так, что предотвращается ослепление других участников движения. Такая функция ближнего света называется также, например, адаптивным дальним светом или маскированным дальним светом. Под функцией дальнего света понимается в смысле изобретения распределение света, которое направлено на максимальное освещение окружения перед транспортным средством, без учета возможного ослепления других участников движения.
Оптические оси блоков фар образуются из основного направления излучения блоков фар. Кроме того, они могут следовать из геометрии самого блока фары. Если блок фары излучает параллельный пучок света, то оптическая ось параллельна этому пучку света и проходит через источник света блока фар. Если блок фары содержит несколько источников света, то оптическая ось проходит, например, через середину блока фары и ориентирована параллельно пучку света, который излучается блоком фары. Кроме того, оптическая ось может быть направлением максимальной силы освещения блока фары. Максимальную силу освещения можно определять, например, с помощью измерительного экрана, который расположен, например, на расстоянии 10 м перед блоком фары перпендикулярно излучению света блоком фары.
Согласно одному варианту выполнения способа, участника движения обнаруживают в направлении излучения света системы фар и регулируют создаваемое системой фар для функции ближнего света распределение света в зависимости от положения участника движения относительно транспортного средства. Создаваемое системой фар для функции ближнего света распределение света изменяют, в частности, так, что в направлении обнаруженного участника движения образуется средняя зона с меньшей дальностью освещения и по обе стороны рядом с этой средней зоной боковые зоны с большей дальностью освещения. Кроме того, можно измерять вертикальный относительно системы фар угол участника движения в направлении излучения света системой фар. В этом случае можно дополнительно для функции ближнего света регулировать дальность освещения в направлении обнаруженного участника движения в зависимости от вертикального угла участника движения.
Согласно одному варианту выполнения способа, согласно изобретению, для функции дальнего света поворачивают вертикально вниз оптические оси блоков фары относительно горизонтальной ориентации.
Для функции дальнего света оптические оси блоков фар можно поворачивать, в частности, так, что они пересекаются на заданном расстоянии от транспортного средства в середине между блоками фар. Эта точка пересечения оптических осей лежит, например, в зоне от 200 м до 500 м перед транспортным средством. Точка пересечения лежит, в частности, на полотне дороги, соответственно, на плоскости, которая задана точками соприкосновения покрышек с полотном дороги.
С помощью способа, согласно изобретению, можно, с одной стороны, обеспечивать функцию ближнего света, за счет чего можно предотвращать ослепление других участников движения. С другой стороны, обеспечивается функция дальнего света, которая приводит к оптимальному освещению зоны движения перед транспортным средством. При этом функция дальнего света, согласно изобретению, отличается от обычной функции дальнего света тем, что блоки фар поворачиваются горизонтально друг к другу относительно параллельной ориентации и точка пересечения оптических осей лежит перед транспортным средством в середине между блоками фар.
Система фар, согласно изобретению, характеризуется тем, что с помощью управляющего устройства для функции дальнего света оптические оси блоков фар поворачиваются горизонтально друг к другу относительно параллельной ориентации.
Согласно одной модификации системы фар, согласно изобретению, она соединена с устройством для обнаружения участника движения в направлении излучения света системы фар. В этом случае предусмотрено регулирование распределения света с помощью управляющего устройства в зависимости от положения другого участника движения относительно транспортного средства.
Кроме того, система фар содержит, в частности, запоминающее устройство, в котором хранятся параметры для угла поворота оптических осей блоков фар для функции дальнего света. Хранящиеся в запоминающем устройстве параметры применяются при переключении с функции ближнего света на функцию дальнего света для согласования горизонтальной и вертикальной ориентации оптических осей при переходе от функции ближнего света к функции дальнего света. Таким образом, обеспечивается оптимальное распределение света, которое получается из наложения излучения света правого и левого блоков фары.
Для осуществления согласования оптических осей с функцией дальнего света может быть также предусмотрено отдельное управляющее устройство. Кроме того, это согласование может быть интегрировано с помощью модуля программного обеспечения в управляющем устройстве или управляющих устройствах для блока (блоков) фары.
Ниже приводится пояснение изобретения на основе примера выполнения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг.1 - пример выполнения блока фары системы фар, согласно изобретению;
фиг.2 - пример выполнения системы фар, согласно изобретению;
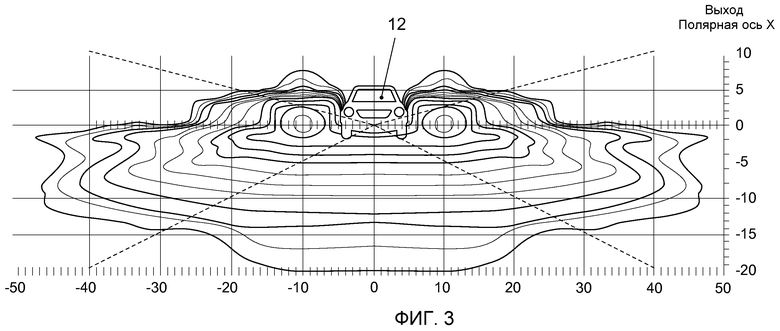
фиг.3 - диаграмма равной освещенности общего распределения освещения для функции ближнего света на вертикальной стене при обнаружении движущегося впереди транспортного средства;
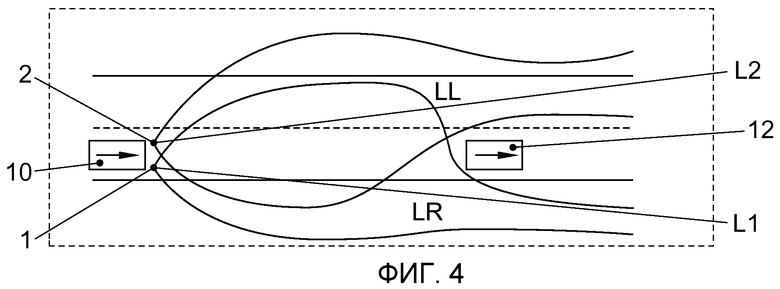
фиг.4 - ориентация оптических осей блоков фар для функции ближнего света, когда обнаружено движущееся впереди транспортное средство; и
фиг.5 - ориентация оптических осей блоков фар для функции дальнего света.
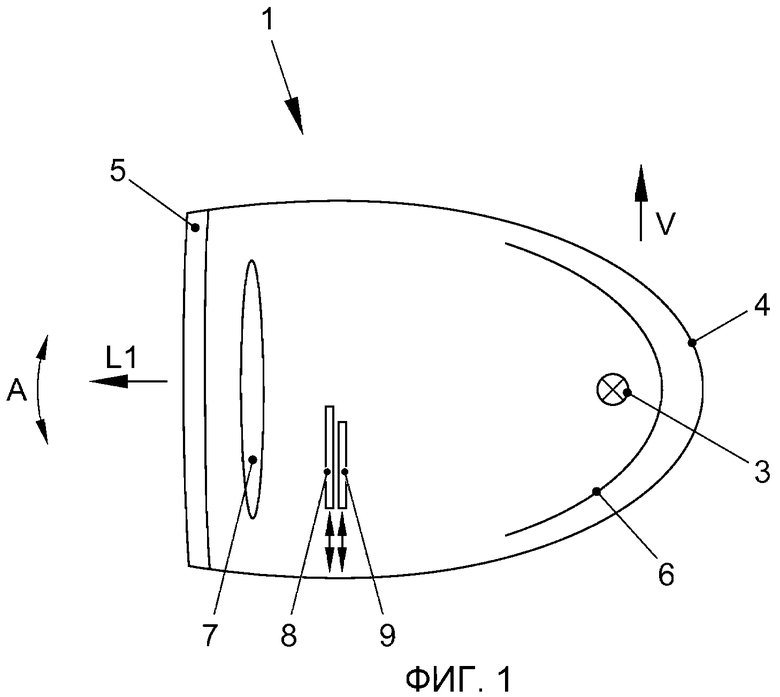
Система фар содержит две расположенные на расстоянии друг от друга прожекторные фары 1 и 2, которые расположены спереди на правой и левой сторонах транспортного средства само по себе известным образом и могут образовывать каждая блок фары. В качестве альтернативного решения, блок фары может содержать несколько фар. Одна из прожекторных фар 1 показана на фиг.1. Расположенная на другой стороне прожекторная фара 2 выполнена по существу идентично.
На фиг.1 показан разрез в плоскости, которая параллельна плоскости, проходящей через продольную ось транспортного средства и вертикаль V. Прожекторная фара 1 содержит само по себе известным образом источник 3 света, который окружен выполненным в форме эллипсоида вращения отражателем 6. Отражатель 6 имеет тем самым две фокусные точки. Источник 3 света находится в одной из фокусных точек отражателя 6. Излучаемый источником 3 свет отражается от отражателя 6 в направлении L1 излучения света прожекторной фары 1 в направлении проекционной линзы 7. Направление L1 излучения света представляет также оптическую ось прожекторной фары. Система бленд с плоскими экранами 8 и 9 расположена в положении фокуса проекционной линзы 7 и вблизи второй фокусной точки отражателя 6. Нормали к плоским экранам 8 и 9 ориентированы по существу параллельно направлению L1 излучения света. Источник 3 света, отражатель 6, линза 7 и экраны 8, 9 расположены внутри корпуса 4, который закрыт рассеивателем 5.
Прожекторную фару 1 можно само по себе известным образом наклонять вверх и вниз в направлении стрелки А для установки дальности освещения, т.е. предусмотрена возможность вертикального поворота. Кроме того, предусмотрена возможность поворота направления L1 излучения света прожекторной фары 1 горизонтально, т.е. вокруг вертикальной оси. Дополнительно к этому, можно изменять дальность освещения и, в частности, форму границы светотени всего распределения света прожекторной фары 1 за счет того, что экраны 8 и 9 перемещаются в вертикальном направлении. Для изменения положения экранов 8 и 9 предусмотрено управляющее устройство.
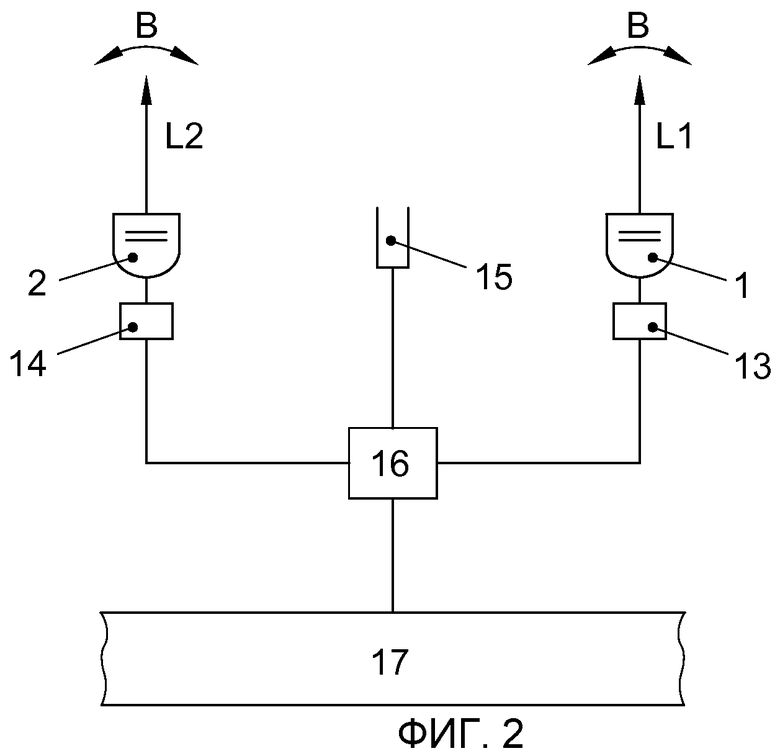
Ниже приводится со ссылками на фиг.2 пояснение того, как осуществляется управление левой и правой фарой 1 и 2 блоков фар системы фар.
Правая фара 1 соединена с управляющим устройством 13, левая фара 2 - с управляющим устройством 14. Эти управляющие устройства 13, 14 управляют, с одной стороны, углом поворота, в частности углом поворота вокруг вертикальной и горизонтальной осей, излучаемых фарами 1 и 2 лучей света в направлениях L1 и L2. При этом L1 и L2 обозначают оптические оси правого и левого блоков фары. Кроме того, управляющие устройства 13 и 14 управляют вертикальным положением экранов 8 и 9 системы экранов для правой и левой фар 1, 2.
Кроме того, предусмотрено устройство 15 для обнаружения участника движения в направлении излучения света фарами 1, 2. Это устройство 15 обнаружения может быть камерой с присоединенным блоком обработки изображения, которая обнаруживает огни движущихся впереди или встречных транспортных средств. С помощью блока обработки изображения можно определять направление этих огней как в горизонтальном, так и вертикальном направлении. Блок обработки изображения анализирует получаемую с помощью направленной вперед камеры сцену. На этой сцене определяется положение огней движущихся впереди и встречных транспортных средств. На основании расстояния по горизонтали между двумя фарами, соответственно, задними огнями другого транспортного средства можно дополнительно оценивать ширину транспортного средства. Наконец, можно распознавать освещение дороги, соответственно, населенный пункт. Освещение дороги можно, как правило, отличать от огней транспортного средства за счет положения на изображении камеры или за счет модулированной по частоте сетью интенсивности. Угол раствора камеры предпочтительно соответствует углу раствора системы фар.
Направление в горизонтальной и вертикальной плоскостях передается блоком 15 обнаружения в управляющее устройство 16, которое дополнительно соединено с управляющими устройствами 13 и 14.
Согласно одному другому варианту выполнения системы, устройство 15 обнаружения выполнено в виде лазерного или радарного датчика, с помощью которого можно измерять расстояние до объектов в направлении излучения света. При этом можно обнаруживать, в частности, неосвещенных или недостаточно освещенных участников движения, таких как, например, пешеходы, и возможно, также велосипедисты. Кроме того, посредством измерения расстояния можно целенаправленно обнаруживать участников движения, которые находятся внутри пределов ослепления дальним светом. Наконец, за счет измерения расстояния, скорости и направления движения участников движения можно хорошо выполнять классификацию транспортных средств, соответственно, участников движения, за счет чего предотвращается неправильное управление системой фар. Из расстояния до объекта можно вычислять вертикальный угол, который применяется в качестве величины управления для системы фар.
Кроме того, с помощью измерения расстояния с помощью лазерного или радарного датчика можно отличать движущееся транспортное средство от стоящего транспортного средства посредством измерения скорости. Кроме того, с помощью сканирующего лазерного измерителя расстояния можно измерять ширину обнаруженного объекта, так что с высокой надежностью можно распознавать тип объектов, т.е. является ли он участником движения, транспортным средством или велосипедистом или ограждающим дорожным столбом.
Лазерный или радарный датчик можно также комбинировать с камерой, с целью увеличения надежности распознавания, в частности, относительно определения вертикального положения участника движения. Поскольку камеры, лазерные или радарные датчики находят все большее применение в транспортных средствах и системах обеспечения движения, то их можно применять также для управления системой фар, без возникновения дополнительных затрат.
Управляющее устройство 16 дополнительно соединено с шиной 17 транспортного средства, через которую в управляющее устройство 16 можно передавать другие измеряемые в транспортном средстве данные. Например, можно передавать в управляющее устройство 16 угол поворота рулевого колеса или данные, из которых можно определять радиус проезжаемого в данный момент поворота.
Ниже со ссылками на фиг.3 и 4 поясняется, как происходит управление фарами 1 и 2 в зависимости от данных устройства 15 обнаружения и/или других определяемых в транспортном средстве данных для функции ближнего света.
Если обнаруживаются в середине перед собственным транспортным средством 10 другие участники движения, такие как, например, движущийся впереди автомобиль 12, то оптические оси L1 и L2 обеих фар 1 и 2 поворачиваются друг от друга и оба экрана 8 и 9 как системы экранов правой фары, так и системы экранов левой фары 2 перемещаются в положение, при котором возникает в общем распределении света средняя зона с меньшей дальностью освещения, в которой находится другой участник движения, без вызывания ослепления.
На фиг.3 показана диаграмма равной освещенности с распределением яркости на вертикальной стене, как оно согласно изобретению настроено для функции ближнего света, когда обнаружен, например, движущийся впереди автомобиль 12. В этом случае экраны 8 и 9 систем экранов для правой и левой фар 1 и 2 находятся в положении, при котором образуется средняя зона с меньшей дальностью освещения. Дополнительно к этому, оптические оси L1 и L2 обеих фар 1 и 2 повернуты так далеко друг от друга, что ширина средней зоны соответствует ширине автомобиля 12. Таким образом, в середине общего распределения света освобождается зона для другого участника движения, так что он не ослепляется.
На фиг.4 показано общее распределение света на виде сверху. Освещение LR правой фары 1 в зоне полотна дороги транспортного средства 10, а также в зоне встречного полотна дороги ограничено так, что граница светотени возможно дальше достигает движущегося впереди автомобиля 12, однако предотвращается ослепление водителя движущегося впереди автомобиля 12. В зоне справа рядом с движущимся впереди автомобилем 12 с помощью правой фары 1 обеспечивается освещение дальним светом, без ослепления за счет этого водителя движущегося впереди автомобиля 12. Левая фара 2 обеспечивает освещение LL. Оно также ограничено в зоне полотна дороги транспортного средства 10 так, что граница светотени как можно дальше достигает движущегося впереди автомобиля 12, однако предотвращается ослепление водителя движущегося впереди автомобиля 12. В зоне встречного полотна дороги левой фарой 2 обеспечивается освещение с большой дальностью действия, так что водитель транспортного средства 10 может хорошо видеть встречное полотно дороги.
Результирующееся из освещений LR и LL общее распределение света постоянно согласовывается с горизонтальным и вертикальным углами транспортного средства 10 относительно движущегося впереди автомобиля 12, так что дальность освещения в средней зоне как можно дальше достигает движущегося впереди автомобиля.
Ниже приводится со ссылками на фиг.5 описание изменения ориентации оптических осей L1 и L2 при переходе от функции ближнего света к функции дальнего света.
Как указывалось выше, оптические оси L1 и L2 при функции ближнего света поворачиваются в горизонтальном направлении друг от друга. Кроме того, обеспечиваемое для функции ближнего света общее распределение света маскируется с помощью экранов 8 и 9. При переходе к функции дальнего света, управление которым осуществляется вручную или автоматически в зависимости от устройства 15 обнаружения управляющих устройств 13 и 14, экраны 8 и 9 выдвигаются из излучения света фар 1 и 2, так что экраны 8 и 9 больше не оказывают влияния на общее распределение света. Было установлено, что получающееся в этом случае общее распределение света, хотя и соответствует функции дальнего света, однако является недостаточным для водителя относительно освещения полотна дороги. Поэтому для функции дальнего света системы фар, согласно изобретению, оптические оси L1 и L2 фар 1 и 2 поворачиваются горизонтально друг к другу относительно параллельной ориентации, как показано на фиг.5. Для этого управляющие устройства 13 и 14 содержат каждое запоминающее устройство, в котором хранятся параметры для углов поворота оптических осей L1 и L2 фар 1 и 2 для функции дальнего света.
Предпочтительно оптические оси L1 и L2 поворачиваются друг к другу не только горизонтально, но дополнительно также поворачиваются вертикально вниз. При этом хранящиеся в управляющих устройствах 13 и 14 параметры приводят к повороту оптических осей L1 и L2 для функции дальнего света, при которой оптические оси L1 и L2 пересекаются на заданном расстоянии перед транспортным средством 10 в середине между фарами 1 и 2. Эта точка пересечения обозначена на фиг.5 позицией S. Точка S пересечения лежит, например, в зоне от 200 м до 500 м, в частности 250 м перед транспортным средством на полотне дороги, в частности, когда полотно дороги является плоским.
При рассматривании диаграммы равной освещенности, показанной на фиг.3 для функции ближнего света, для функции дальнего света, но получается, что относительно функции ближнего света необходимо корректировать оптические оси L1 и L2 для функции дальнего света так, что оптические оси, которые проходят через среднюю точку, соответствующую источнику света фар 1 и 2 и через максимальное значение освещенности на измерительном экране на расстоянии 10 м, пересекаются на хранящемся в качестве параметров в управляющих устройствах 13 и 14 расстоянии перед транспортным средством 10.
ПЕРЕЧЕНЬ ПОЗИЦИЙ
1 Правая фара
2 Левая фара
3 Источник света
4 Корпус
5 Рассеиватель
6 Отражатель
7 Проекционная линза
8 Первый экран
9 Второй экран
10 Транспортное средство с системой фар
12 Движущийся впереди автомобиль
13 Управляющее устройство для правой фары
14 Управляющее устройство для левой фары
15 Устройство для обнаружения других участников движения
16 Управляющее устройство
17 Шина транспортного средства
L1 и L2 Оптические оси
S Точка пересечения оптических осей для функции дальнего света.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ФАР ПРОЖЕКТОРНОГО ТИПА ДЛЯ АВТОМОБИЛЕЙ | 2007 |
|
RU2441778C2 |
| Неослепляющая автомобильная фара | 2015 |
|
RU2608203C2 |
| ФАРА (ВАРИАНТЫ) И СПОСОБ ОСВЕЩЕНИЯ ДОРОГИ | 2010 |
|
RU2446963C1 |
| Адаптивная система головного освещения автомобиля | 2016 |
|
RU2656976C1 |
| СПОСОБ УПРАВЛЕНИЯ ФАРАМИ И УСТРОЙСТВО УПРАВЛЕНИЯ ФАРАМИ | 2018 |
|
RU2760074C1 |
| ПРОТИВООСЛЕПЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ГОЛОВНЫХ ФАР АВТОМАШИН | 1991 |
|
RU2020372C1 |
| Способ и устройство энергосберегающего управления уличным освещением (варианты) | 2017 |
|
RU2700677C2 |
| Способ автоматического регулирования пучков света головных фар транспортного средства | 2023 |
|
RU2808589C1 |
| ПРОТИВООСЛЕПИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПУТИ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2727547C2 |
| Система освещения беспилотного транспортного средства | 2021 |
|
RU2764035C1 |
Группа изобретений относится к системе фар и способу управления системой фар для транспортного средства. Система фар для транспортного средства (10) содержит правый и левый блоки (1, 2) фары и одно управляющее устройство. Для функции ближнего света с помощью управляющего устройства обеспечивается возможность поворота горизонтально друг от друга оптических осей (L1, L2) блоков (1, 2) фар относительно параллельной ориентации. Для функции дальнего света с помощью управляющего устройства обеспечивается возможность поворота оптических осей (L1, L2) блоков (1, 2) фар горизонтально друг к другу относительно параллельной ориентации. Достигается обеспечение хорошей видимости лежащей перед транспортным средством дороги и одновременно эффективное предотвращение ослепления других участников движения. 2 н. и 8 з.п. ф-лы, 5 ил.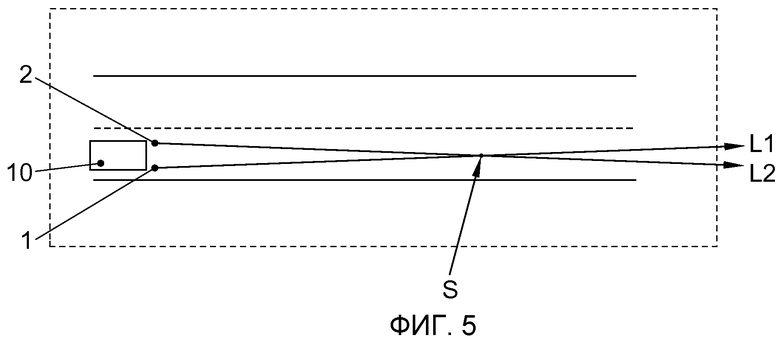
1. Способ управления системой фар для транспортного средства (10), содержащей правый и левый блок (1, 2) фары, при котором для функции ближнего света оптические оси (L1, L2) блоков фар поворачивают горизонтально друг от друга относительно параллельной ориентации, отличающийся тем, что для функции дальнего света оптические оси (L1, L2) блоков (1, 2) фар поворачивают горизонтально друг к другу относительно параллельной ориентации.
2. Способ по п.1, отличающийся тем, что обнаруживают участника (12) движения в направлении излучения света системы фар и регулируют создаваемое системой фар для функции ближнего света распределение света в зависимости от положения участника (12) движения относительно транспортного средства (10).
3. Способ по п.2, отличающийся тем, что создаваемое системой фар для функции ближнего света распределение света изменяют так, что в направлении обнаруженного участника (12) движения образуется средняя зона с меньшей дальностью освещения и по обе стороны рядом с этой средней зоной боковые зоны с большей дальностью освещения.
4. Способ по п.1, отличающийся тем, что измеряют вертикальный относительно системы фар угол участника (12) движения в направлении излучения света системой фар, и что для функции ближнего света регулируют дальность освещения в направлении обнаруженного участника (12) движения в зависимости от вертикального угла участника (12) движения.
5. Способ по п.1, отличающийся тем, что для функции дальнего света поворачивают вертикально вниз оптические оси (L1, L2) блоков (1, 2) фары относительно горизонтальной ориентации.
6. Способ по любому из пп.1-5, отличающийся тем, что для функции дальнего света оптические оси (L1, L2) блоков (1, 2) фар поворачивают так, что они пересекаются на заданном расстоянии перед транспортным средством (10) в середине между блоками (1,2) фар.
7. Способ по п.6, отличающийся тем, что точка (S) пересечения оптических осей (L1, L2) лежит в зоне от 200 м до 500 м перед транспортным средством (10).
8. Система фар для транспортного средства (10), содержащая правый и левый блок (1, 2) фары и по меньшей мере одно управляющее устройство (13, 14), при этом с помощью управляющего устройства (13, 14) для функции ближнего света обеспечивается возможность поворота горизонтально друг от друга оптических осей (L1, L2) блоков (1, 2) фар относительно параллельной ориентации, отличающаяся тем, что с помощью управляющего устройства (13, 14) для функции дальнего света обеспечивается возможность поворота оптических осей (L1, L2) блоков (1, 2) фар горизонтально друг к другу относительно параллельной ориентации.
9. Системы фар по п.8, отличающаяся тем, что система фар соединена с устройством для обнаружения участника (12) движения в направлении излучения света системы фар, и выполнена с возможностью регулирования распределении света с помощью управляющего устройства (13, 14) в зависимости от положения другого участника (12) движения относительно транспортного средства (10).
10. Системы фар по п.8 или 9, отличающаяся тем, что система фар содержит запоминающее устройство, в котором хранятся параметры для угла поворота оптических осей (L1, L2) блоков (1, 2) фар для функции дальнего света.
| WO 2008037388 A2, 03.04.2008 | |||
| DE 10352950 A1, 16.06.2005 | |||
| DE 102005041235 A1, 15.03.2007 | |||
| EP 1780462 A1, 02.05.2007 | |||
| WO 8605147 A1, 12.09.1986 | |||
| СПОСОБ ДИНАМИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР МОТОТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304250C2 |

