Изобретение относится к области автомобилестроения, а именно к разделу использования информационной техники в конструкциях транспортных средств, и может быть использовано для автоматизации управления светом фар транспортных средств в зависимости от профиля рельефа дороги.
Известен способ регулирования пучков света головных фар в вертикальной плоскости в зависимости от загрузки и ее распределения по осям транспортного средства, заключающийся в том, что предварительно на неподвижном транспортном средстве, установленном горизонтально, вручную выставляют и фиксируют автоматическим корректором угол наклона пучков света фар, установленный изготовителем транспортного средства. При последующем движении при изменениях загрузки транспортного средства автоматически поддерживают угол наклона пучков света фар, выставленный при начальной регулировке [1].
Недостатками известного способа являются инерционность регулирования угла наклона пучков света фар при движении транспортного средства. В результате при движении транспортного средства пучки света фар повторяют в вертикальной плоскости колебания подрессоренной части конструкции транспортного средства. При этом свет фар попадает в глаза встречных водителей и ухудшается освещение участка дороги перед транспортным средством.
Наиболее близким техническим решением является принятый в качестве прототипа способ автоматического регулирования ориентации пучков света головных фар транспортного средства в вертикальной плоскости в зависимости от контролируемых изменений дифферента при движении транспортного средства, реализованный динамическим корректором наклона световых пучков. Способ заключается в том, что предварительно при размещении транспортного средства неподвижно без дифферента на горизонтальной опорной поверхности выполняют начальную регулировку пучков света фар, устанавливая заданный изготовителем угол наклона пучков света, а при движении контролируют теми или иными средствами колебания подрессоренной части конструкции транспортного средства и используют выявляемые изменения дифферента для автоматического возвращения ориентации пучков света головных фар в вертикальной плоскости к начальному положению, зафиксированному при выполнении начальной регулировки [2].
Недостатком известного способа является нецелесообразность возвращения ориентации в вертикальной плоскости пучков света головных фар к начальному положению, зафиксированному при выполнении начальной регулировки, без учета рельефа дороги в профиле. При проезде выпуклых в профиле участков дороги это может вести к ослеплению встречных водителей, а при проезде вогнутых в профиле участков такое возвращение существенно сокращает протяженность освещаемого фарами участка дороги.
Техническая задача, на решение которой направлено изобретение, заключается в обеспечении автоматического регулирования ориентации пучков света головных фар в вертикальной плоскости при движении транспортного средства, поддерживающего зафиксированную при начальной регулировке начальную протяженность освещенного ближним или дальним светом фар участка дороги с учетом рельефа в профиле.
Решение поставленной технической задачи достигается тем, что в способе автоматического регулирования пучков света головных фар транспортного средства, заключающемся в том, что предварительно выполняют начальную регулировку пучков ближнего и дальнего света фар на транспортном средстве, неподвижно установленном без дифферента на горизонтальном участке дороги, а в процессе дорожного движения автоматически регулируют направление пучков ближнего и дальнего света в вертикальной плоскости, согласно изобретению, при начальной регулировке запоминают в режиме ближнего света удаление дальней границы освещенного светом фар участка дороги, а в режиме дальнего света - ближней границы, в процессе дорожного движения обеспечивают в автоматическом режиме обзор полосы движения дороги перед транспортным средством, распознают свободный режим движения по полосе дороги по признаку отсутствия лидера перед транспортным средством, а при отсутствии лидера распознают границы освещенного ближним или дальним светом фар участка полосы движения, далее рассчитывают для режима ближнего света удаление дальней границы, а для режима дальнего света - удаление ближней к транспортному средству границы освещенного участка полосы движения, вычисляют разность рассчитанного удаления с ранее зафиксированным удалением той же границы участка дороги, освещенного в том же режиме работы фар при выполнении начальной регулировки, и затем регулируют направление пучков ближнего или дальнего света в вертикальной плоскости, в зависимости от знака и значения разности фактического и зафиксированного при начальной регулировке удаления границы освещенного участка дороги.
Решение поставленной технической задачи достигается благодаря автоматическому выполнению расчета требуемого угла наклона светового пучка как в режиме ближнего, так и дальнего света, который обеспечивает в режиме ближнего света такое же удаление дальней границы освещенного светом фар участка дороги, а в режиме дальнего света - ближней границы, как и при начальной регулировке ближнего и дальнего света фар соответственно, когда неподвижное транспортное средство было горизонтально установлено без дифферента. Для этого при движении транспортного средства контролируют изменения удаления указанных границ освещенного светом фар участка дороги и рассчитывают разность и ее знак рассчитанного удаления с ранее зафиксированным удалением той же границы участка дороги, освещенного в том же режиме работы фар при выполнении начальной регулировки. Полученная разность и определит требуемый для текущих условий угол наклона в вертикальной плоскости световых пучков головных фар транспортного средства, автоматически регулируемый бортовым оборудованием. В итоге угол наклона световых пучков фар будет соответствовать рельефу дороги, а дальность освещенного светом фар участка дороги будет поддерживаться равной начальной дальности, зафиксированной при начальной регулировке фар.
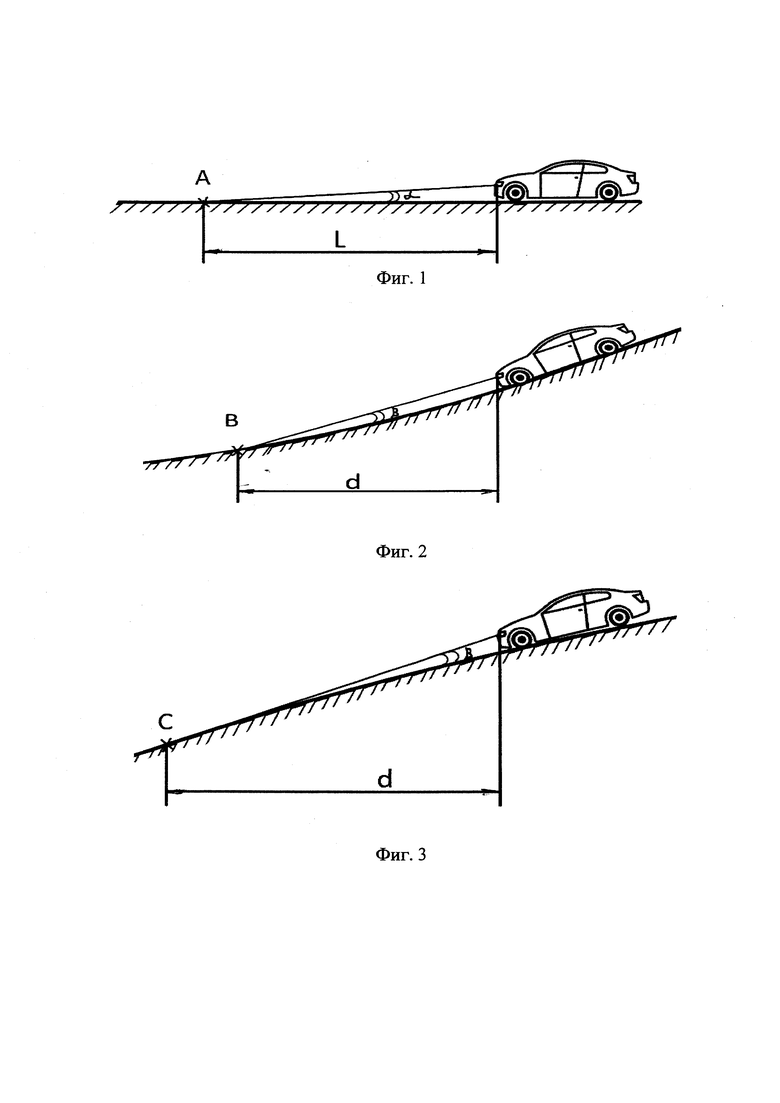
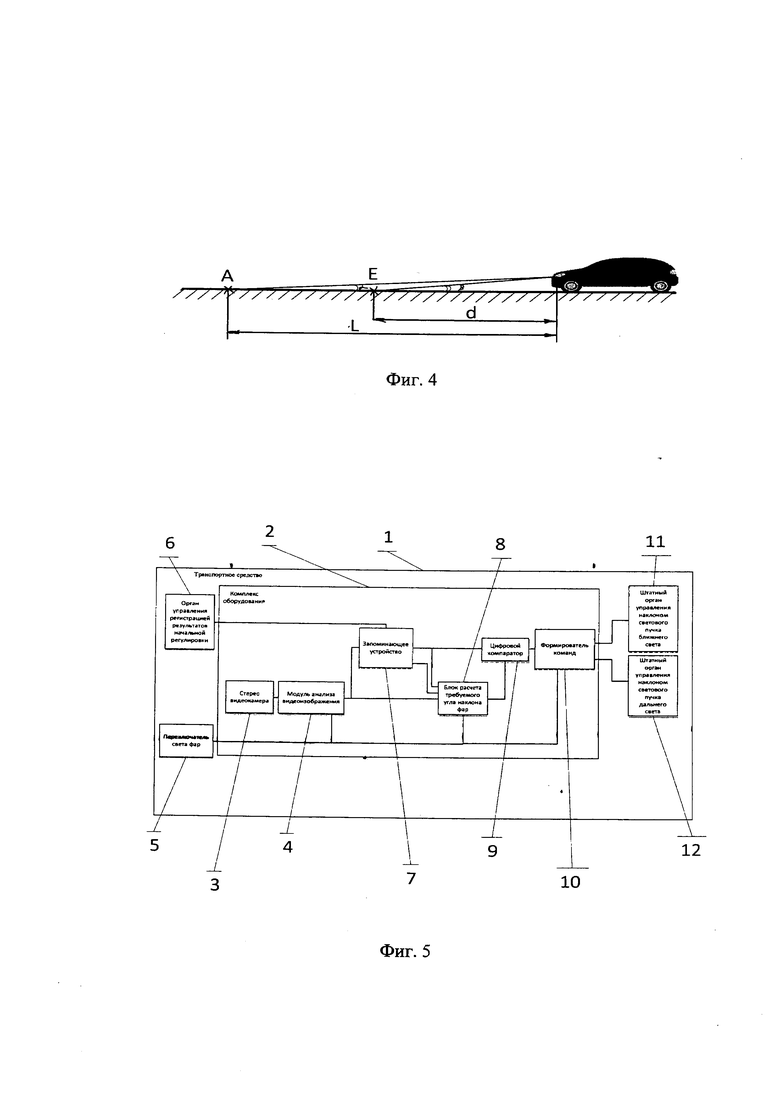
Изобретение поясняется чертежами, где на фиг. 1-3 представлена иллюстрация изменений дальности обзора полосы движения перед транспортным средством для плоского, вогнутого и выпуклого в профиле участков дороги; на фиг. 4 - геометрическая иллюстрация расчетной схемы определения требуемого угла наклона световых пучков фар; на фиг. 5 - схема комплекса оборудования для автоматического регулирования пучков света головных фар на транспортном средстве.
На чертежах приняты следующие обозначения: α, β, γ - начальный угол наклона световых пучков фар, выставленный при начальной регулировке на горизонтально установленном без дифферента неподвижном транспортном средстве, фактический угол наклона световых пучков фар при движении по вогнутому в профиле участку дороги, фактический угол наклона световых пучков фар при движении по выпуклому в профиле участку дороги соответственно; А, В, С, Е - положение границы освещенного головными фарами участка дороги при начальной регулировке на начальном удалении L от неподвижного горизонтально установленного без дифферента транспортного средства, фактическое положение той же границы на удалении d при движении транспортного средства по криволинейному вогнутому или выпуклому в профиле участку дороги, Е - возможное положение той же границы на удалении d при движении транспортного средства по произвольному участку дороги соответственно.
Способ автоматического регулирования пучков света головных фар транспортного средства состоит в том, что предварительно при начальной регулировке фар ближнего и дальнего света выставляют и фиксируют угол наклона пучков света, и заодно с ним в режиме ближнего света еще и удаление дальней границы освещенного светом фар участка дороги, а в режиме дальнего света - ближней границы перед транспортным средством, неподвижно установленном без дифферента на горизонтальной опорной поверхности. Это обеспечивает возможность регулирования наклона пучков света при движении транспортного средства по критерию поддержания протяженности освещенного участка дорожной поверхности, зафиксированной при начальной регулировке.
При движении транспортного средства средствами видеонаблюдения осуществляют обзор полосы движения дороги перед транспортным средством, и программными средствами распознают свободный режим движения по признаку отсутствия лидера перед транспортным средством. Это позволяет избежать ошибок при автоматической оценке протяженности освещенного участка дорожной поверхности при наличии лидера, ограничивающего обзор средствам видеонаблюдения.
При отсутствии лидера автоматически распознают удаление границы освещенного ближним или дальним светом фар участка полосы движения. Это позволяет в автоматическом режиме контролировать в зависимости от профиля дороги, изменения удаления в режиме ближнего света дальней границы освещенного светом фар участка дороги, а в режиме дальнего света - ближней границы.
В автоматическом режиме вычисляют разность рассчитанной величины удаления с ранее зафиксированным удалением той же границы освещенного участка дороги в том же режиме работы фар при выполнении начальной регулировки. Это обеспечивает формирование команд на регулирование наклона пучков света фар, с учетом знака и величины рассчитанной разности фактического и зафиксированного при начальной регулировке удаления соответствующей границы освещенного участка дороги.
На основе полученной разности рассчитывают требуемый угол наклона световых пучков фар, обеспечивающий поддержание удаления той же границы освещенного участка дороги в том же режиме работы фар, что и при выполнении начальной регулировки.
Протяженность освещенного участка полосы движения дороги перед транспортным средством зависит от его загрузки, а в процессе движения, кроме того, многократно изменяется в зависимости от кривых профиля дороги и колебаний подрессоренной части конструкции транспортного средства на неровностях дорожного покрытия (см. фиг. 1-3).
При начальной регулировке фар ближнего света, устанавливают угол наклона верхней границы светового пучка в расчете на освещение дороги на дистанцию полного остановочного пути при начальной скорости 60 км/ч. Этот наклон предотвращает ослепление встречных водителей, но ограничивает протяженность плоского освещенного участка дороги расстоянием 56…65 м, сообразно высоте размещения фар. При начальной регулировке фар дальнего света добиваются параллельности оси отсчета фары плоскости опорной поверхности, так что плоский освещенный участок дороги отстоит от транспортного средства на определенную дистанцию, зависящую от высоты размещения и конструкции фар (см. фиг. 4).
В режиме ближнего света протяженность освещенного светом фар участка полосы движения дороги ограничивает наиболее удаленная от транспортного средства граница, а в режиме дальнего света освещенный участок дороги начинается от ближайшей к транспортному средству границы. Удаление указанных границ от транспортного средства изменяется при изменениях загрузки транспортного средства, колебаниях подрессоренной части конструкции транспортного средства и проезде кривых в профиле участков дороги.
На вогнутых и выпуклых в профиле участках дороги указанные границы смещаются соответственно ближе или дальше от транспортного средства как в режиме ближнего, так и дальнего света согласно фиг. 1-3. При этом показанная в профиль светотеневая граница соответствует в режиме ближнего света верхней границе пучка, а в режиме дальнего света - нижней границе пучка дальнего света.
Поэтому для предотвращения попадания света фар в глаза встречных водителей и обеспечения безопасности движения в условиях плохой освещенности и необходимо регулировать наклон световых пучков фар таким образом, чтобы удаление дальней границы освещенного ближним светом участка дороги, а в режиме дальнего света - ближней границы, соответствовало выставленному при начальной регулировке фар. Для такого регулирования необходимо оценивать удаление указанных ближайшей и наиболее удаленной от транспортного средства границ освещенного участка дороги в режимах ближнего и дальнего света соответственно согласно фиг. 1.
Для оценки расстояния до световых границ освещенного участка дороги пригодны известные технические средства, например, лидары, излучающие или сканирующие, а также пассивные видеокамеры, наименее затратным и наиболее доступным из которых для управляемых водителями транспортных средств является стереовидеокамера, комплектуемая цифровым модулем, снабженным программным обеспечением для распознавания и анализа видеоизображений, включая и расчеты дальности до границ полосы освещенного участка полосы движения.
Автоматическое регулирование направления пучков ближнего и дальнего света в вертикальной плоскости производят по значению и знаку разности δ углов α и β наклона световых пучков: фактического β и начального α, выставленного в том же режиме работы фар при начальной регулировке, согласно фиг. 1-3.
При этом для перехода от фактического удаления d дальней границы освещенного ближним светом участка дороги, а в режиме дальнего света - ближней границы, к соответствующему этому удалению значению требуемого угла γ наклона световых пучков достаточно воспользоваться зафиксированными при начальной регулировке фар значением угла α наклона световых пучков и удалением L той же границы в том же режиме работы фар согласно фиг. 4.
Для расчета с достаточной степенью точности значения необходимой для осуществления регулирования разности δ требуемого угла γ и выставленного угла α в том же режиме работы фар при начальной регулировке фар пригодны, например, следующие соотношения:

где δ - вычисляемая переменная, отражающая разность требуемого γ и начального α, выставленного при начальной регулировке, углов γ и α наклона световых пучков соответственно;

где L и d - удаление границы освещенного участка дороги при начальной регулировке и при движении по криволинейным в профиле участкам дороги соответственно.
Знак «+» в формуле (2) необходим при d>L, а знак «-» - при d<L.
Автоматическое регулирование наклона пучков света головных фар транспортного средства проводят в автоматическом режиме с использованием комплекса оборудования, размещаемого или встраиваемого в конструкцию и программное обеспечение транспортного средства.
Транспортное средство 1 снабжают комплексом 2 оборудования, включающим в себя стереовидеокамеру 3 для обзора полосы движения перед транспортным средством согласно фиг. 5.
Стереовидеокамеру 3 снабжают подсоединяемым к ее выходу модулем 4 анализа видеоизображений, к управляющему входу которого подключен выход переключателя 5 света фар. Выход штатного органа 6 управления регистрацией результатов начальной регулировки подсоединен к управляющему входу запоминающего устройства 7, к информационному входу которого подключен выход модуля 4 анализа видеоизображений. Кроме того, выход модуля 4 анализа видеоизображений подключен к одному из информационных входов блока 8 расчета требуемого угла наклона пучков света фар, к другим информационным входам которого подсоединены выходы запоминающего устройства 7, с которых передаются коды выставленного при начальной регулировке угла наклона светового пучка фар в вертикальной плоскости и удаления в режиме ближнего света наиболее далекой, а в режиме дальнего света - ближайшей к транспортному средству светотеневых границ. Кроме того, выход запоминающего устройства 7, с которого передается код выставленного при начальной регулировке угла α наклона светового пучка фар в вертикальной плоскости, подключен к одному из входов цифрового компаратора 9, к другому входу которого подключен выход блока 8 расчета требуемого угла наклона световых пучков фар. Выход цифрового компаратора 9 соединен с информационным входом формирователя 10 команд, выход которого связан с входами штатных органов 11 и 12 управления наклоном световых пучков фар соответственно ближнего и дальнего света в вертикальной плоскости. При этом управляющие входы блока 8 расчета требуемого угла наклона фар и формирователя 10 команд соединены с выходом переключателя 5 света фар.
Способ автоматического регулирования пучков света головных фар транспортного средства реализуется следующим образом.
При изготовлении или при эксплуатации транспортного средства 1 на последнем размещают согласно фиг. 5 комплекс оборудования 2. Предварительно выполняют вручную начальную регулировку пучков ближнего и дальнего света фар на транспортном средстве 1, неподвижно установленном без дифферента на горизонтальном участке дороги.
Стереовидеокамера 3 в автоматическом режиме осуществляет циклический обзор опорной поверхности перед транспортным средством 1, а цифровой модуль 4 анализа видеоизображений распознает поступающие на его информационный вход сигналы стереовидеокамеры 3 в режиме ближнего или дальнего света фар с учетом команды переключателя 5 света фар, поступающей на управляющий вход модуля 4.
По завершении начальной регулировки фар воздействием вручную на штатный орган 6 управления регистрацией результатов регулировки, подают команду на управляющий вход запоминающего устройства 7, на информационный вход которого поступает сигнал от цифрового модуля 4 анализа видеоизображений. В результате по командам органа 6 управления регистрацией результатов регулировки запоминающее устройство 7 фиксирует коды выставленного угла наклона светового пучка фар в вертикальной плоскости и удаление в режиме ближнего света наиболее далекой, а в режиме дальнего света - ближайшей к транспортному средству светотеневых границ.
При движении транспортного средства 1 стереовидеокамера 3 осуществляет циклический обзор полосы движения перед транспортным средством 1, а цифровой модуль 4 в автоматическом режиме анализирует видеоизображения, распознает свободный режим движения по полосе дороги, по признаку отсутствия лидера перед транспортным средством 1, распознает границы освещенного ближним или дальним светом фар участка полосы движения, в соответствии с сигналом переключателя 5 света фар и рассчитывает для режима ближнего света удаление дальней границы, а для режима дальнего света - удаление ближней к транспортному средству границы освещенного участка полосы движения.
При условии отсутствия лидера перед транспортным средством 1 выходной сигнал цифрового модуля 4, отражающий удаление указанных границ освещенного участка полосы движения, подается на первый информационный вход блока 8 расчета требуемого угла γ наклона световых пучков фар. Выбор алгоритма расчета для режима ближнего или дальнего света осуществляется по сигналу переключателя 5 света фар, подаваемому на управляющий вход блока 8 расчета. Блок 8 выполняет расчет требуемого значения угла γ наклона световых пучков фар по сигналам режима ближнего или дальнего света, фактического удаления d соответствующей этому режиму границы освещенного участка полосы движения и зафиксированным при начальной регулировке удалению L той же границы освещенного участка полосы движения и угла αнаклона светового пучка согласно формулам (1)-(2).
С выхода блока 8 расчета требуемого угла γ наклона световых пучков фар код требуемого значения угла γ наклона для соответствующего режима ближнего или дальнего света поступает на первый вход цифрового компаратора 9, на другой вход которого подается код с выхода запоминающего устройства 7, отражающий зафиксированный при начальной регулировке код выставленного начального угла α наклона световых пучков фар в вертикальной плоскости. Цифровой компаратор 9 формирует разность δ требуемого текущего и начального α углов, по величине и знаку которой осуществляется регулировка при движении транспортного средства 1. Сигнал разности δ требуемого текущего и выставленного при начальной регулировке углов γ и α наклона световых пучков фар подается с выхода цифрового компаратора 9 на вход формирователя 10 команд. Выдачей формирователем 9 команд, соответствующих определенному режиму ближнего или дальнего света, управляет своими сигналами переключатель 5 света фар, выход которого подсоединен к управляющему входу формирователя 9 команд. С выхода формирователя 9 команды поступают на входы штатных органов 11 и 12 управления наклоном световых пучков фар соответственно ближнего и дальнего света в вертикальной плоскости.
Регулировка углов наклона световых пучков фар соответственно ближнего и дальнего света в вертикальной плоскости в зависимости от удаления границ освещенного участка полосы движения перед транспортным средством применима для предотвращения ослепления встречных водителей и улучшения освещения участка дороги перед транспортным средством на нужную протяженность.
Таким образом, изобретение позволит осуществлять автоматическое регулирование ориентации пучков света головных фар в вертикальной плоскости при движении транспортного средства, обеспечивающее поддержание зафиксированной при начальной регулировке рациональной протяженности освещения дороги ближним или дальним светом при проезде участков дороги с учетом их рельефа в профиле.
Источники информации
1. Патент РФ №2051051, МПК B60Q 1/10, опубл. 1995 г.
2.https://www.hella.com/techworld/ru/Техническая информация/Автомобильное освещение/Корректор-фар-838/.-URL:https.//abiznews.net/novosti/ogranitchitely-skorosti-avtomobilya/ (прототип).
Изобретение относится к осветительным устройствам транспортных средств. Способ автоматизации управления светом фар транспортных средств заключается в том, что предварительно выполняют начальную регулировку пучков ближнего и дальнего света фар на транспортном средстве и запоминают в режиме ближнего света удаление дальней границы освещенного светом фар участка дороги, а в режиме дальнего света - ближней границы. В процессе дорожного движения обеспечивают в автоматическом режиме обзор полосы движения дороги перед транспортным средством, распознают свободный режим движения по полосе дороги по признаку отсутствия лидера перед транспортным средством. Далее рассчитывают для режима ближнего света удаление дальней границы, а для режима дальнего света - удаление ближней к транспортному средству границы освещенного участка полосы движения. Затем регулируют направление пучков ближнего или дальнего света в вертикальной плоскости в зависимости от знака и значения разности фактического и зафиксированного при начальной регулировке удаления границы освещенного участка дороги. Достигается возможность автоматической регулировки ориентации пучков света головных фар в вертикальной плоскости сообразно рельефу в профиле участка дороги перед транспортным средством. 5 ил.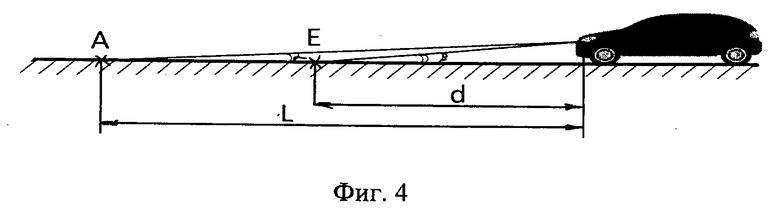
Способ автоматического регулирования пучков света головных фар транспортного средства, заключающийся в том, что предварительно выполняют начальную регулировку пучков ближнего и дальнего света фар на транспортном средстве, неподвижно установленном без дифферента на горизонтальном участке дороги, а в процессе дорожного движения автоматически регулируют направление пучков ближнего и дальнего света в вертикальной плоскости, отличающийся тем, что при начальной регулировке запоминают в режиме ближнего света удаление дальней границы освещенного светом фар участка дороги, а в режиме дальнего света - ближней границы, в процессе дорожного движения обеспечивают в автоматическом режиме обзор полосы движения дороги перед транспортным средством, распознают свободный режим движения по полосе дороги по признаку отсутствия лидера перед транспортным средством, а при отсутствии лидера распознают границы освещенного ближним или дальним светом фар участка полосы движения, далее рассчитывают для режима ближнего света удаление дальней границы, а для режима дальнего света - удаление ближней к транспортному средству границы освещенного участка полосы движения, вычисляют разность рассчитанного удаления с ранее зафиксированным удалением той же границы участка дороги, освещенного в том же режиме работы фар при выполнении начальной регулировки, и затем регулируют направление пучков ближнего или дальнего света в вертикальной плоскости в зависимости от знака и значения разности фактического и зафиксированного при начальной регулировке удаления границы освещенного участка дороги.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ ФАР ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2051051C1 |
| Магнетрон | 1935 |
|
SU50260A1 |
| JP H07186818 A, 25.07.1995 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СВЕТА ФАР ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2048316C1 |
| Резистивный материал | 1982 |
|
SU1048523A1 |

