В настоящем описании и материалах заявки использованы только открытые источники информации.
Изобретение относится к информационно-управляющим системам (ИУС), а более конкретно к автоматизированным информационно-управляющим системам операторов, представляющим собой комплекс электронно-вычислительной аппаратуры и других технических средств на объектах, предназначенных для автоматизированной выработки рекомендаций по управлению ими в целях наиболее эффективного использования их технических возможностей. Основные задачи, решаемые ИУС: сбор, обработка и отображение поступающей от различных источников информации; определение эффективности и выработка оптимальных вариантов применения различных видов объектов; целераспределение огневых и технических средств; осуществление боевых и навигационных расчетов; автоматизированная передача расчетных данных потребителям; контроль реализации команд, информации и др.
Основные элементы ИУС: вычислительные устройства, пульты управления со средствами отображения информации, источники питания, устройства сопряжения с источниками информации и комплексами управления техническими средствами, автоматизированные рабочие места и др. (см., например, «Военный энциклопедический словарь». М.: «Воениздат», 2007. - С.86).
Для решения задач поражения целей, рационального маневрирования, выбора оптимальных тактических приемов и др. необходимо прежде всего получение информации о внешней обстановке, характеристиках местности, особенностях рельефа, расположении целей и препятствий и др. В настоящее время эта задача решается путем придания приборам наблюдения и разведки, прицелам и вооружению такого положения, которое обеспечило бы выполнение соответствующих задач с наибольшей эффективностью. Например, совмещение траектории снаряда (ракеты) с целью в момент достижения им (ею) цели обеспечивается различными устройствами, одной из основных функций которых является визирование цели. От эффективности визирования (прежде всего, точности визирования) зависит и эффективность вооружения, а вместе с тем и эффективность стрельбы в целом. От точности визирования и состояния приборов наблюдения зависит точность измерения дальности, достоверность определения координат местных предметов, навигационных характеристик и др.
Известна, например, автоматизированная информационно-управляющая система оператора, входящая в состав комплекса вооружения танков Т-55 и Т-62 (см., например, Руководство по материальной части и эксплуатации танка Т-62. М.: Воениздат, 1968, с.195-210). Она содержит пульт управления оператора и оптически сопряженные блок формирования визирного индекса и оптическую формирующую систему. В этом комплексе при стрельбе в обычных условиях с места по неподвижной цели визирование осуществляется путем совмещения точки визирования на цели с визирным индексом (прицельной маркой), а изменения условий стрельбы учитываются перемещением визирного индекса (прицельной марки) на определенную угловую величину до выстрела. При этом возникает угловое рассогласование между линией визирования и вооружением (осью ствола). Это обеспечивает однообразие прицеливания (совмещения визирного индекса с целью). Но вместе с этим возникает недостаток: линия визирования отклоняется от оптической оси поля зрения визирного устройства, что сопровождается ухудшением видимости, снижением разрешающей способности оптической системы и быстрым нарастанием зрительной усталости наводчиков-операторов. Кроме того, при стрельбе в условиях, отличных от обычных (стрельба с ходу, по движущейся цели, стрельба при сильном боковом ветре и т.д.), приходится вводить поправку в положение линии визирования относительно цели, что вызывает смещение визирного индекса относительно цели. В этом случае однообразие визирования нарушается, снижается его точность, ухудшается состояние операторов, а вместе с тем падает и эффективность стрельбы.
Известна автоматизированная информационно-управляющая система оператора, комплекса вооружения танка Т-80 (см., например, Танк Т-80Б. ТО и ИЭ. Кн.1. М., Воениздат, 1984, с.46-95).
Она содержит последовательно соединенные пульт управления оператора, оптическую формирующую систему и блок формирования визирного индекса, блок подсветки визирного индекса, первый вход которого соединен с выходом пульта управления оператора, источник питания, блок изменения яркости визирного индекса, первый вход которого соединен с выходом источника питания, а второй - с выходом пульта управления оператора.
Эта система выгодно отличается от получивших широкое распространение систем в серийных системах управления огнем. В этой системе оператор при каждом визировании совмещает визирный индекс с центром цели, чем достигается однообразие прицеливания во всех случаях стрельбы. Кроме того, для облегчения обнаружения визирного индекса в неблагоприятных условиях стрельбы (плохая видимость, пыледымовые и световые помехи и др.) он подсвечивается.
Эта система также имеет недостатки. При стрельбе по различным целям оператор должен удерживать линию визирования на объекте визирования (цели) в течение продолжительного времени (не менее 3 с), которое необходимо для ввода требуемых поправок. Это время может быть еще большим, если при стрельбе использовать управляемые ракеты. Например, при стрельбе управляемой ракетой на максимальную дальность оператор вынужден удерживать визирный индекс на объекте визирования (цели) более 15 с (см., например, Латухин А.Н. Противотанковое вооружение. - М.: Воениздат, 1974, с.192-235). Такое прицеливание, несмотря на то, что оно точнее и проще, чем в танке Т-62, вызывает повышенную напряженность оператора, в частности его зрительного аппарата и нервной системы, что очень часто приводит к потере цели (объекта визирования) или визирного индекса (даже при его подсветке) в условиях действия пыледымовых помех, световых помех, особенно на пестрых фонах различной яркости. Ситуация еще более усугубляется, если физическое состояние оператора по каким-либо причинам не соответствует требуемому (ранение, утомление, стрессовые срывы и др.). Продолжение стрельбы в таком состоянии оператора возможно, однако ее эффективность резко падает, а причину резкого снижения эффективности определить очень сложно, так как состояния оператора ни он сам, ни экипаж танка в процессе стрельбы не замечают. При визировании подвижного объекта (цели) ошибки визирования резко возрастают, особенно с увеличением скорости объекта визирования.
Известна также автоматизированная информационно-управляющая система оператора (см., например, патент РФ №2395058 с приоритетом от 05.08.2009 г.), являющаяся по технической сути и существенным признакам наиболее близкой к заявляемой и принятая за ее прототип. Она содержит последовательно соединенные пульт управления оператора, источник питания, блок изменения яркости, второй вход которого соединен со вторым выходом пульта управления оператора, сумматор, фильтр низкой частоты, блок подсветки визирного индекса, второй вход которого соединен с третьим выходом пульта управления оператора, блок светофильтров и блок формирования визирного индекса, последовательно соединенные генератор периодических сигналов, блок регулировки периодических сигналов и датчик частоты периодических сигналов, первый выход которого соединен со вторым входом фильтра низкой частоты, блок информации и управления, первый и второй блоки управления, датчик амплитуды периодических сигналов, указатели амплитуды и частоты периодических сигналов, при этом вход блока информации и управления соединен с выходом оптической формирующей системы, а его выход - со входом блока формирования визирного индекса, второй вход сумматора соединен со вторым выходом блока регулировки периодических сигналов, вход датчика амплитуды периодических сигналов соединен с третьим выходом блока регулировки периодических сигналов, первые входы указателей амплитуды и частоты периодических сигналов соединены с выходами датчиков соответственно амплитуды и частоты периодических сигналов, а вторые входы - с выходами соответственно первого и второго блоков управления указателями амплитуды и частоты периодических сигналов.
Введение в эту систему генератора и блока регулировки периодических сигналов, фильтра низкой частоты, датчика частоты периодических сигналов и других элементов и связей позволило помимо подсветки визирного индекса достичь и периодического изменения его яркости, благодаря чему его обнаружение на пестрых фонах различной яркости значительно облегчается. Этому способствует и фильтрация электрического сигнала подсветки от высокочастотных помех с помощью фильтра низких частот и от оптических помех с помощью блока светофильтров. Возможность регулирования амплитуды и частоты периодического сигнала дает возможность операторам оптимизировать для себя режим подсветки визирного индекса, оценивать свое состояние по соответствующим указателям, а с использованием блока визуальной информации контролировать и повышать их профессиональный уровень.
Однако недостатки, связанные с определением состояния наводчика-оператора, полностью не устранены. При визировании подвижных объектов ошибки визирования практически не уменьшаются, а следовательно, и напряженность оператора продолжает оставаться на высоком уровне.
Задачей настоящего изобретения является устранение этих недостатков, расширение функциональных возможностей системы.
Указанная задача решается тем, что автоматизированная информационно-управляющая система оператора, содержащая последовательно соединенные пульт управления оператора, источник питания, блок изменения яркости, второй вход которого соединен со вторым выходом пульта управления оператора, сумматор, фильтр низкой частоты, блок подсветки визирного индекса, второй вход которого соединен с третьим выходом пульта управления оператора, блок светофильтров и блок формирования визирного индекса, последовательно соединенные генератор периодических сигналов, блок регулировки периодических сигналов и датчик частоты периодических сигналов, первый выход которого соединен со вторым входом фильтра низкой частоты, блок информации и управления, первый и второй блоки управления, датчик амплитуды периодических сигналов, указатели амплитуды и частоты периодических сигналов, при этом вход блока информации и управления соединен с выходом оптической формирующей системы, а его выход - со входом блока формирования визирного индекса, второй вход сумматора соединен со вторым выходом блока регулировки периодических сигналов, вход датчика амплитуды периодических сигналов соединен с третьим выходом блока регулировки периодических сигналов, первые входы указателей амплитуды и частоты периодических сигналов соединены с выходами датчиков соответственно амплитуды и частоты периодических сигналов, а вторые входы - с выходами соответственно первого и второго блоков управления указателями амплитуды и частоты периодических сигналов, снабжена масштабирующим блоком и последовательно соединенными блоком включения, запоминающим устройством, переключателем и вторым сумматором, выход которого соединен со входом оптической формирующей системы, при этом первые входы блока включения и масштабирующего блока соединены с четвертым выходом пульта управления оператора, второй вход масштабирующего блока соединен со вторым выходом переключателя, а выход масштабирующего блока соединен со вторым входом второго сумматора, блок информации и управления снабжен счетно-решающим блоком, подключенными к его первому и второму входам датчиками дальности и типа визируемого объекта, электроприводом, соединенным с выходом счетно-решающего блока, последовательно соединенными блоком визуальной информации, вход которого соединен с выходом оптической формирующей системы, подвижной зеркальной системой и экранирующей шторкой, второй вход которой соединен с выходом электропривода, а выход соединен оптически со входом блока формирования визуального индекса.
Введение новых элементов и связей позволяет не только определять состояние наводчика-оператора путем, например, определения его зрительного утомления одним из известных способов (см., например, авторское свидетельство СССР №339280, кл. А61В 5/16, 1971) и прогнозировать изменение показателей его функциональной деятельности, но и при визировании подвижных объектов значительно уменьшать действие помех и ошибки визирования, а следовательно, и напряженность оператора.
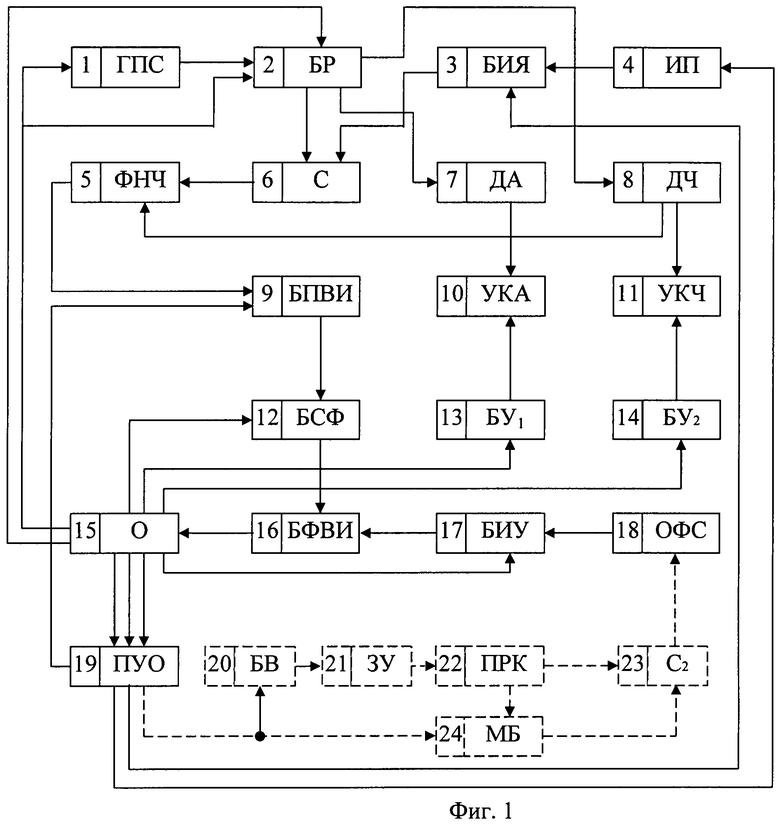
На чертеже (см. фиг.1) показано взаимное расположение и связи элементов предлагаемой информационно-управляющей системы. Новые элементы и связи показаны пунктиром. Сплошными линиями показаны элементы и связи, реализующие прототип. Приняты следующие обозначения: 1 - генератор периодических сигналов (ГПС), 2 - блок регулировки периодических сигналов (БР), 3 - блок изменения яркости (БИЯ), 4 - источник питания (ИП), 5 - фильтр низкой частоты (ФНЧ), 6 - сумматор (С), 7 - датчик амплитуды периодических сигналов (ДА), 8 - датчик частоты периодических сигналов (ДЧ), 9 - блок подсветки визирного индекса (БПВИ), 10 и 11 - указатели амплитуды (УКА) и частоты (УКЧ) периодических сигналов, 12 - блок светофильтров (БСФ), 13 - первый блок управления (БУ1), 14 - второй блок управления (БУ2), 15 - оператор (О), 16 - блок формирования визирного индекса (БФВИ), 17 - блок информации и управления (БИУ), 18 - оптическая формирующая система (ОФС), 19 - пульт управления оператора (ПУО), 20 - блок включения (БВ), 21 - запоминающее устройство (ЗУ), 22 - переключатель (ПРК), 23 - второй сумматор (С2), 24 - масштабирующий блок (МБ).
Блоки 1-6, 8, 9, 12, 16, 18, 19 являются штатными элементами прототипа и используются в предлагаемом техническом решении без каких-либо конструктивных изменений. Конструктивное исполнение блоков 7, 10, 11 и 20-24 широко известно в научно-технической литературе (см., например, Корнеев В.В. и др. Электроавтоматика и электрооборудование танков, ч.1. М.: ВАБТВ, 1964, с.19-104, 191-220; Энциклопедия кибернетики, т.1. Киев, 1975, с.254-256; Основы автоматики и танковые автоматические системы. М.: ВАБТВ, 1976, с.134-136 и др.). Первый 13 и второй 14 блоки управления выполнены на основе выключателей (тумблеров) и кнопок управления (см. там же), при нажатии которых на входы блоков 10 и 14 подаются сигналы управления, по которым на информационных табло указателей 10 и 12 появляется информация о текущих значениях амплитуды и частоты периодических сигналов, полученных с выходов датчиков соответственно амплитуды 7 и частоты 8. Блок информации и управления 17 снабжен счетно-решающим блоком, подключенными к его первому и второму входам датчиками дальности и типа визируемого объекта, электроприводом, входом соединенным с выходом счетно-решающего блока, последовательно соединенными блоком визуальной информации, вход которого соединен с выходом оптической формирующей системы, подвижной зеркальной системой и экранирующей шторкой, второй вход которой соединен с выходом электропривода, а выход соединен оптически со входом блока формирования визуального индекса. Датчики дальности и типа визируемого объекта снабжены переключателями соответствующих значений (дальности, типа); счетно-решающий блок и электропривод снабжены блоками включения.
С помощью блока визуальной информации, подвижной зеркальной системы и шторки с электроприводом (и ручным приводом) наводчик-оператор 15 может вводить шторку в оптическую систему, экранируя блок формирования визуального индекса 16 от оптической формирующей системы 18 и регулировать степень экранирования (путем изменения размеров отверстия в шторке) на основании данных датчиков дальности и визируемого объекта. С помощью подвижной зеркальной системы и блока визуальной информации осуществляется управление визуальной информацией, предоставляемой оператору для его контроля и обучения. Масштабирующий блок 24 выполнен регулируемым. Его передаточный коэффициент устанавливается исходя из технических характеристик конкретной автоматизированной системы визирования оператора, а также от состояния и возможностей самого оператора.
Работает предлагаемая автоматизированная информационно-управляющая система оператора следующим образом. Как и в прототипе, оператор (наводчик) 15, включив систему управления огнем (в том числе блоки: 1, 2, 3, 4, 9 и 19), наблюдает через блок формирования визирного индекса 16 и оптическую формирующую систему 18 поле боя, ведет разведку целей (объектов визирования) и выбирает определенную из них (например, объект визирования) для поражения. Затем с помощью пульта управления оператора 19 и оптической формирующей системы 18 (через блоки 24 и 23) совмещает точку визирования на объекте визирования с визирным индексом, сформированным в блоке 16. В прототипе визирный индекс нанесен на стеклянную пластинку в форме угольника, с вершиной которого и совмещается точка визирования. В ряде других визирных устройств индекс (визирный) может быть сформирован электронно-оптическим путем. В этом случае его изображение образуется на экране электронно-лучевой трубки и при помощи оптических преломляющих устройств вводится в поле зрения наводчика-оператора (см., например, Гуглин И.Н. Телевизионные игровые автоматы и тренажеры. - М.: Радио и связь, 1982). В современных визирных устройствах изменение яркости индекса достигается за счет изменения напряжения подсветки, для чего в цепь питания лампы подсветки включается регулируемое сопротивление (см., например, Танк «Урал» (Т-72), ТО и ИЭ. Кн.1. М.: Воениздат, 1975, 304 с.). Таким же образом производится изменение яркости визирного индекса в блоке 3 предлагаемого устройства. В дальнейшем (в процессе всего процесса визирования при выстреле одного снаряда или наведении одной ракеты) сигнал на выходе блока 3 остается постоянным. Для получения переменной составляющей сигнала подсветки в прототипе используется блок 1 (генератор периодических сигналов). При этом его параметры (амплитуда и частота) устанавливаются с помощью блока 2, поскольку для различных операторов они (параметры) различны. Одновременно с установкой оптимальной частоты в блоке 2, благодаря связям блока 2 с блоками 8 и затем 5, такая же частота устанавливается и в блоках 8 и 5.
Изменение амплитуды сигнала подсветки визирного индекса будет происходить синфазно с изменением периодического сигнала. Наличие переменной составляющей в сигнале подсветки вызывает необходимость его фильтрации. Электрическую фильтрацию периодического сигнала подсветки производят путем включения электрического фильтра (блок 5) в электрическую цепь, передающую электрический сигнал с сумматора 6 в блок подсветки визирного индекса 9 для преобразования сигнала из электрической формы в оптическую. При этом фильтр настраивается на частоту изменения сигнала подсветки визирного индекса (благодаря связи блока 5 с блоком 8). Включение фильтра 5 обеспечивает исключение из электрического сигнала высокочастотных составляющих, способствующих размыванию изображения визирного индекса.
Перед началом использования автоматизированной информационно-управляющей системы оператора (например, для визирования и последующей стрельбы) путем ручного переключения светофильтров на блоке 12 оператор добивается оптимального контраста между визирным индексом и фоном с целью, а затем, воздействуя на пульт управления 19 и через него, масштабирующий блок 24 и второй сумматор 23 - на привод зеркал оптической формирующей системы 18. Совмещает визирный индекс с объектом визирования и продолжает визирование (слежение за целью) до момента производства выстрела и оценки результатов стрельбы. При наличии световых помех используется шторка экранирования, размеры отверстия в которой устанавливаются с помощью электропривода на основании данных датчиков дальности и типа визируемого объекта и счетно-решающего блока.
Значение передаточных коэффициентов блоков 23 и 24 при визировании неподвижного объекта равно 1 и не изменяет характеристик прототипа.
При необходимости определения состояния наводчика-оператора включаются блоки 13 и 14, по сигналам с выходов которых указатели 10 и 11 подключаются к выходам датчиков 7 и 8, благодаря чему информация об амплитуде конкретного периодического сигнала и его частоте поступает соответственно на указатели 10 и 11 и при нажатии соответствующей кнопки выдается на информационное табло соответствующего указателя. Затем перемещение наводчиком 15 шторки экранирования в блоке 17 его шторка вводится в оптическую систему прицельного устройства, благодаря чему блок формирования визирного индекса 16 экранируется от оптической формирующей системы 18, что способствует исключению световых помех и однообразию визуальной обстановки. После этого, используя один из известных способов определения степени зрительного утомления (см. а.с. 339280), воздействуют на органы регулировки блока 2, изменяя либо частоту, либо амплитуду периодического сигнала, определяют критическое значение измеряемого показателя. Это значение определяется по его величине, при которой мелькающий свет станет казаться ровным. В этот момент наводчик-оператор нажимает на кнопку соответствующего блока управления (13 или 14) и на информационное табло соответствующего указателя (10 или 11) выдается численное значение измеряемой величины, по которой и судят о степени изменения состояния наводчика-оператора. Использование блока визуальной информации и зеркальной системы происходит при обучении оператора, контроле его профессиональных данных и состояния.
При перемещении объекта визирования и увеличении его угловой скорости оператор испытывает значительное напряжение, и ошибки визирования существенно возрастают. С целью облегчения функций оператора после совмещения визирного индекса и объекта визирования включают блок включения 20, благодаря чему сигнал слежения за объектом визирования, снимаемый с четвертого выхода пульта управления оператора 19, подается на вход запоминающего устройства 21, которое обеспечивает запоминание его низкочастотной составляющей и срабатывание переключателя 22. Срабатывание блока 22 обеспечивает соединение выхода запоминающего устройства 21 с первым входом второго сумматора 23 и срабатывание масштабирующего блока 24 для резкого уменьшения его передаточного коэффициента. В результате этого основная часть сигнала управления (в прототипе - 90-95%) подается с четвертого выхода блока 19 на блок 18 по цепочке через блоки 20-21-22 и 23 автоматически и только незначительная часть через блоки 24 и 23 - вручную оператором. То есть, благодаря запоминанию основной части угловой скорости, оператор обеспечивает устранение лишь разности между угловой скоростью объекта визирования и запомненной (а не равной нулю) угловой скоростью визирного индекса, что существенно облегчает его функции и снижает напряженность. При этом моменты включения и выключения блока 20 определяет оператор самостоятельно, исходя из своего состояния и возможностей.
При выключенных блоках 13, 14, 17 и 24 предлагаемая система работает как прототип, а при дополнительно выключенных блоках 1 и 2 - как штатные прицельные устройства современных боевых машин (танков Т-72, Т-80 и др.).
Введение новых элементов и связей позволило в существенной степени устранить отмеченные недостатки и достичь положительного эффекта. Регулируя и амплитуду, и частоту изменения периодического сигнала, операторы могут не только выбирать для себя оптимальный с учетом реальных условий режим изменения подсветки визирного индекса, степень экранирования поля зрения оператора, но и оценивать свое состояние, в частности степень зрительного утомления, что позволяет своевременно принимать соответствующие меры либо по коррекции выполняемых функциональных действий, либо по замене наводчиков-операторов. После 2-х часов непрерывной работы наводчиков-операторов такие меры позволяют уменьшить снижение эффективности их работы на 10-15%. Возможность обучения операторов и контроля их профессионального уровня позволяет сохранять и повышать их навыки постоянно, а также проводить оценку влияния различных внешних условий на эффективность действий операторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВИЗИРОВАНИЯ ОПЕРАТОРА | 2011 |
|
RU2490581C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2010 |
|
RU2434198C1 |
| СПОСОБ ВИЗИРОВАНИЯ | 2011 |
|
RU2481603C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2011 |
|
RU2473934C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2011 |
|
RU2453810C1 |
| ВИЗИРНО-ПОИСКОВАЯ СИСТЕМА | 2010 |
|
RU2440545C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2012 |
|
RU2481541C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2396505C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2009 |
|
RU2395058C1 |
| СПОСОБ ВИЗИРОВАНИЯ | 2011 |
|
RU2469253C1 |
Изобретение относится к автоматизированным информационно-управляющим системам, в частности системам визирования операторов, например военных объектов. Имеются пульт управления оператора, оптическая формирующая система, последовательно соединенные источник питания, блок изменения яркости, сумматор, фильтр низкой частоты, блок подсветки визирного индекса, блок светофильтров и блок формирования визирного индекса. Предусмотрены генератор периодических сигналов с блоком их регулировки, блок информации и управления, датчики амплитуды и частоты периодических сигналов, указатели их амплитуды и частоты, первый и второй блоки управления. Вход датчика амплитуды периодических сигналов соединен с выходом блока регулировки периодических сигналов, первые входы указателей амплитуды и частоты периодических сигналов соединены с выходами соответствующих датчиков, а вторые входы - с выходами соответственно первого и второго блоков управления. В отличие от известных, предложенная система снабжена масштабирующим блоком и последовательно соединенными блоком включения, запоминающим устройством, переключателем и вторым сумматором. Выход второго сумматора соединен с входом оптической формирующей системы. Первые входы блока включения и масштабирующего блока соединены с четвертым выходом пульта управления оператора. Второй вход масштабирующего блока соединен с вторым выходом переключателя, а выход масштабирующего блока соединен со входом второго сумматора. Блок информации и управления снабжен датчиками дальности и типа визируемого объекта, счетно-решающим блоком и электроприводом со шторкой экранирования. Система характеризуется повышенной помехоустойчивостью и точностными показателями при управлении визированием подвижных объектов. 1 ил.
Автоматизированная система визирования оператора, содержащая последовательно соединенные пульт управления оператора, источник питания, блок изменения яркости, второй вход которого соединен со вторым выходом пульта управления оператора, сумматор, фильтр низкой частоты, блок подсветки визирного индекса, второй вход которого соединен с третьим выходом пульта управления оператора, блок светофильтров и блок формирования визирного индекса, последовательно соединенные генератор периодических сигналов, блок регулировки периодических сигналов и датчик частоты периодических сигналов, первый выход которого соединен со вторым входом фильтра низкой частоты, блок информации и управления, первый и второй блоки управления, датчик амплитуды периодических сигналов, указатели амплитуды и частоты периодических сигналов, при этом вход блока информации и управления соединен с выходом оптической формирующей системы, а его выход - со входом блока формирования визирного индекса, второй вход сумматора соединен со вторым выходом блока регулировки периодических сигналов, вход датчика амплитуды периодических сигналов соединен с третьим выходом блока регулировки периодических сигналов, первые входы указателей амплитуды и частоты периодических сигналов соединены с выходами датчиков соответственно амплитуды и частоты периодических сигналов, а вторые входы - с выходами соответственно первого и второго блоков управления указателями амплитуды и частоты периодических сигналов, отличающаяся тем, что она снабжена масштабирующим блоком и последовательно соединенными блоком включения, запоминающим устройством, переключателем и вторым сумматором, выход которого соединен с входом оптической формирующей системы, при этом первые входы блока включения и масштабирующего блока соединены с четвертым выходом пульта управления оператора, второй вход масштабирующего блока соединен со вторым выходом переключателя, а выход масштабирующего блока соединен со вторым входом второго сумматора, блок информации и управления снабжен счетно-решающим блоком, подключенными к его первому и второму входам датчиками дальности и типа визируемого объекта, электроприводом, соединенным с выходом счетно-решающего блока, последовательно соединенными блоком визуальной информации, вход которого соединен с выходом оптической формирующей системы, подвижной зеркальной системой и экранирующей шторкой, второй вход которой соединен с выходом электропривода, а выход соединен оптически с входом блока формирования визуального индекса.
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2009 |
|
RU2395058C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА БЕРЕГОВОГО БАЗИРОВАНИЯ | 2000 |
|
RU2176818C1 |
| КОРАБЕЛЬНАЯ БОЕВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2000 |
|
RU2163392C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ | 1999 |
|
RU2158024C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ОГНЕМ РЕАКТИВНОЙ АРТИЛЛЕРИИ | 1998 |
|
RU2143133C1 |

