Изобретение относится к области транспортного машиностроения, в частности к рельсовому транспорту, и предназначено для перевозки длинномерных грузов, имеющих круглую форму и сравнительно тонкую, несущую оболочку, например, ракеты-носителя космических аппаратов.
Известно транспортное средство для перевозки длинномерных грузов, содержащее колесные тележки, связанные посредством осей с рамами, продольный вал, шарнирно соединенный с одной из рам, и ложементы, установленные на рамах. При этом ложементы на одной из рам расположены по разные стороны от оси крепления колесной тележки к соответствующей раме, а на другой раме они установлены подвижно (а.с. СССР №751684, кл. B61D 3/12, 30.07.80).
Основным недостатком этого транспортного средства является то, что его конструкция недостаточно надежна в эксплуатации, так как при погрузке (выгрузке) груза не исключен несанкционированный контакт самого груза - ракеты-носителя - с транспортным средством, что является недопустимым.
Указанный недостаток устранен в другом известном транспортном устройстве, предназначенном, преимущественно, для хранения и транспортировки уложенной с помощью грузоподъемных средств ракеты-носителя, содержащем смонтированную на тележках раму, ложементы, установленные на раме. При этом одна из тележек выполнена с электроприводом и редуктором, смонтированными на оси тележки, а на консольных частях рамы установлены передняя и задняя опоры, между которыми расположены тарированные в вертикальной плоскости ложементы. Симметрично продольной оси рамы установлены стойки, в верхних частях которых расположены направляющие головки для улавливания грузоподъемных средств и установки ракеты-носителя в поперечном направлении симметрично продольной оси транспортера. Причем между рамой и тарированными ложементами с обеих сторон установлены съемные винтовые упоры, выполненные в виде винта, ввернутого в корпус с возможностью взаимодействия корпуса с рамой, а винта - с тарированным ложементом (пат. РФ №2141906, кл. B61D 3/16, B60P 3/40, опубл. 27.11.1999).
Несмотря на несомненные положительные качества известного из патента РФ №2141906 транспортера для перевозки длинномерных грузов, ему присущи некоторые недостатки, заключающиеся в том, что в процессе транспортировки ракеты-носителя, например, на стартовую позицию не исключена возможность несанкционированного контакта ракеты с самим транспортером, что существенно повлияет на надежность и безопасность доставки груза, а также не обеспечивается точность маневрирования и остановки транспортера с грузом, отсутствует автоматическое управление и контроль за процессами выполнения работ по транспортировке и доставке груза на стартовую позицию.
В основу предлагаемого изобретения поставлена задача по созданию надежной и безопасной транспортировки ракеты-носителя на стартовую позицию, обеспечению точной остановки и маневрирования платформы для последующей стыковки груза с подъемным средством, исключению несанкционированного контакта самой ракеты-носителя с платформой, а также по обеспечению автоматического управления и контроля за процессами выполнения всех операций, связанных с работой платформы.
Поставленная задача решается тем, что в самоходной буферной платформе, предназначенной, преимущественно, для транспортирования ракеты-носителя, расположенной на подъемно-установочном агрегате, на стартовую позицию, содержащей смонтированную на приводной и неприводной тележках раму, дизельную электростанцию, компрессорную станцию, кузов с отсеком для электрооборудования и кабиной управления, рама, выполненная в виде каркаса, состоит из двух разновысоких частей: передней, низкорасположенной части, на которой установлена защитная арочная ферма и закреплено автосцепное устройство, соединяющее платформу с передней тележкой транспортно-установочного агрегата ракеты, и задней, высокорасположенной части рамы, на которой оборудована площадка под установку агрегатов транспортной системы термостатирования ракеты-носителя и расположен кузов с отсеком для электрооборудования и кабиной управления со стационарными пультами управления. Под передней частью рамы установлена двухосная неприводная тележка, обеспечивающая возможность прохождения платформой криволинейных участков рельсового пути, а под задней частью рамы установлена приводная тележка в виде 2-х колесных пар с электродвигателями переменного либо постоянного тока. Кроме того, под задней частью рамы смонтирован кронштейн, несущий на себе два бесконтактных индуктивных датчика, обеспечивающих управляемое снижение скорости движения платформы перед остановкой и включение тормозной системы в момент ее остановки. Также в отсеке кузова с электрооборудованием размещены частотные преобразователи, регулирующие скорость передвижения платформы и срабатывающие по командам от программируемого контроллера.
При этом защитная арочная ферма выполнена секционной и размещена над консольно-нависающей над платформой носовой частью ракеты-носителя.
Колесные пары приводной тележки служат одновременно тихоходными валами редукторов, которые снабжены устройствами разрыва кинематической связи и автономной системой централизованной смазки.
Кроме того, платформа снабжена выносным пультом управления, состоящим из блока контроля и управления, включающего в себя переключатель направления движения, сигнальные лампы и кнопки пуска и остановки, а также гибкий кабель с разъемом, подсоединенным к одному из двух постов управления, расположенных в передней и задней частях рамы.
А кабина управления с размещенными в ней стационарными пультами операторов оснащена системой кондиционирования воздуха с функцией его частичной очистки.
При этом под низкорасположенной частью рамы размещены трубопроводы пневмосистемы торможения и электрокабели, а на высокорасположенной части рамы смонтирован кронштейн, на котором закреплена лестница для выполнения аварийных работ.
Также платформа снабжена сигнальным и осветительным оборудованием, смонтированным снаружи рамы и кузова.
Предлагаемое изобретение поясняется графически, где на чертежах представлены:
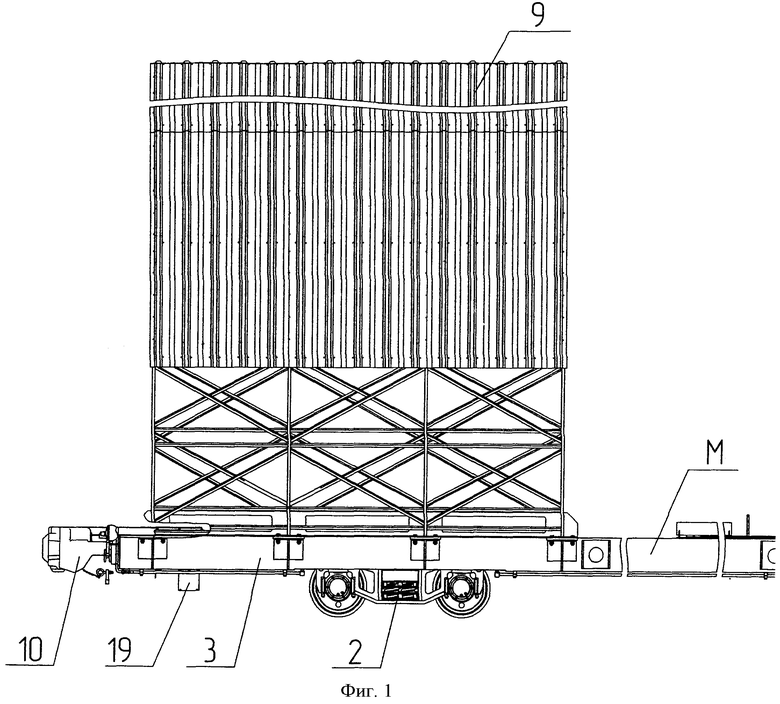
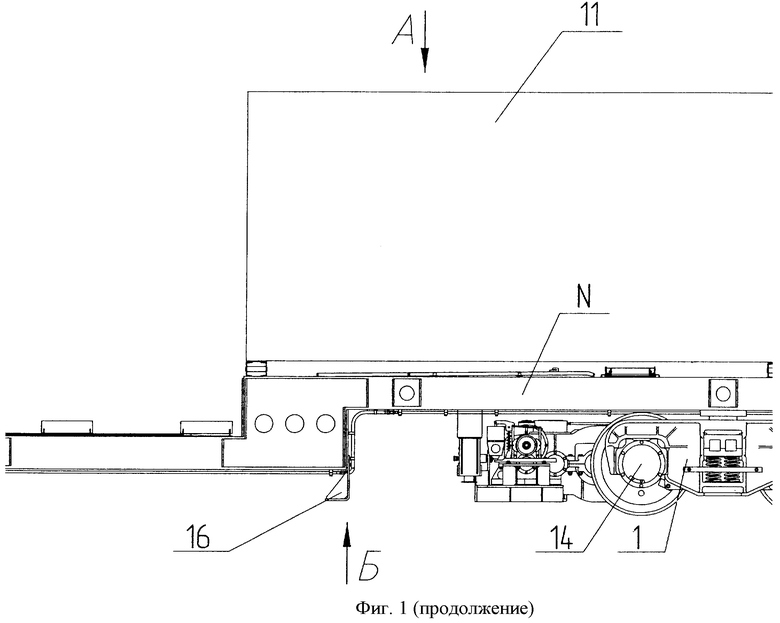
на фиг.1 - общий вид самоходной буферной платформы;
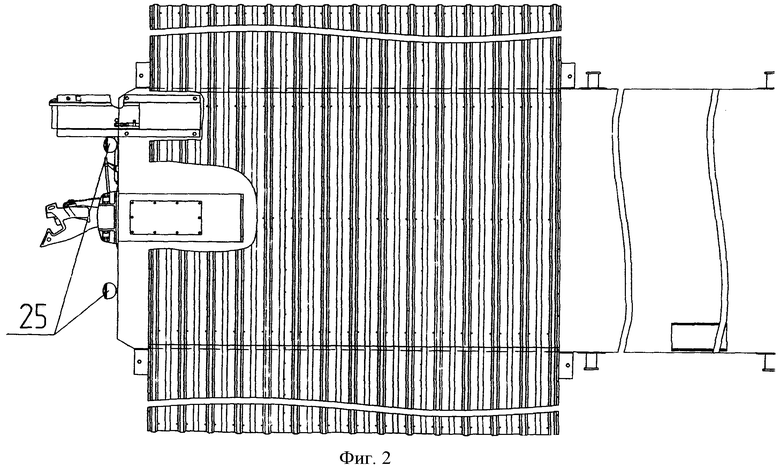
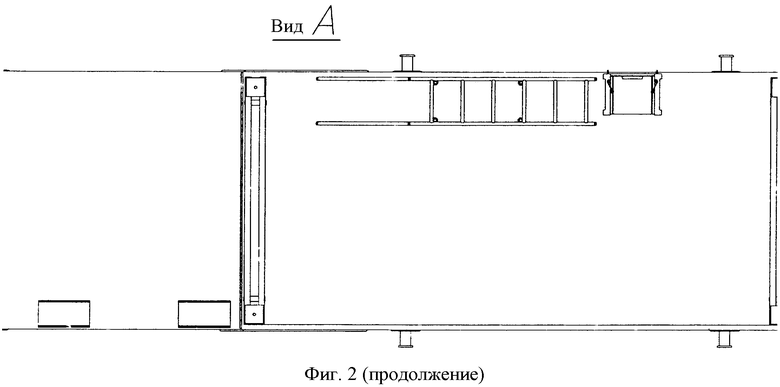
на фиг.2 - вид А на фиг.1 (вид сверху);
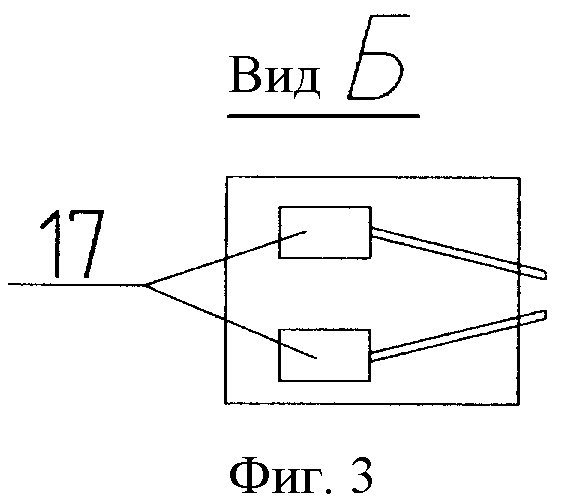
на фиг.3 - выносной элемент Б фиг.1.
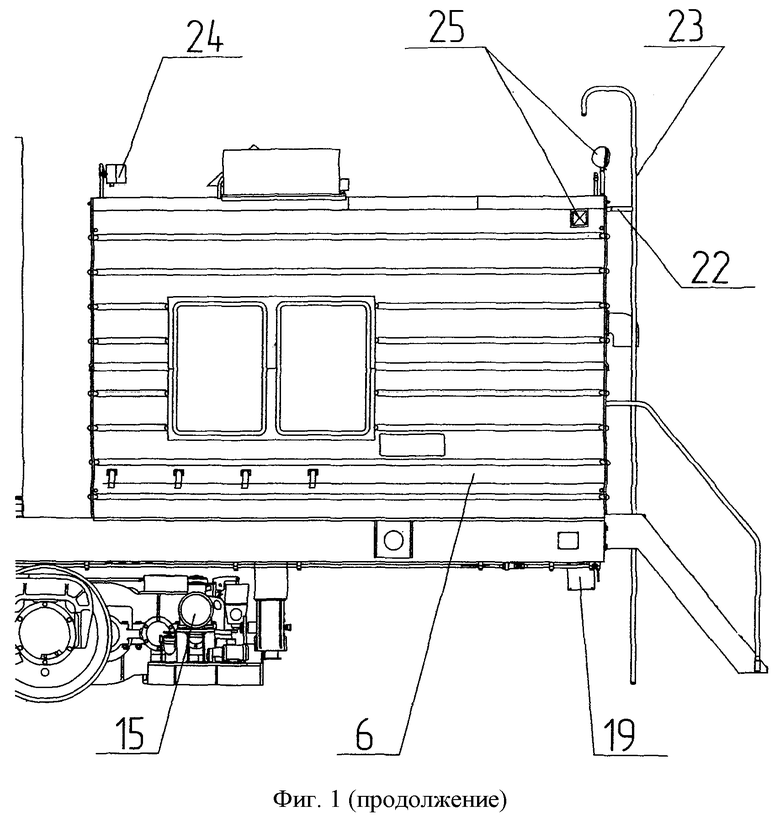
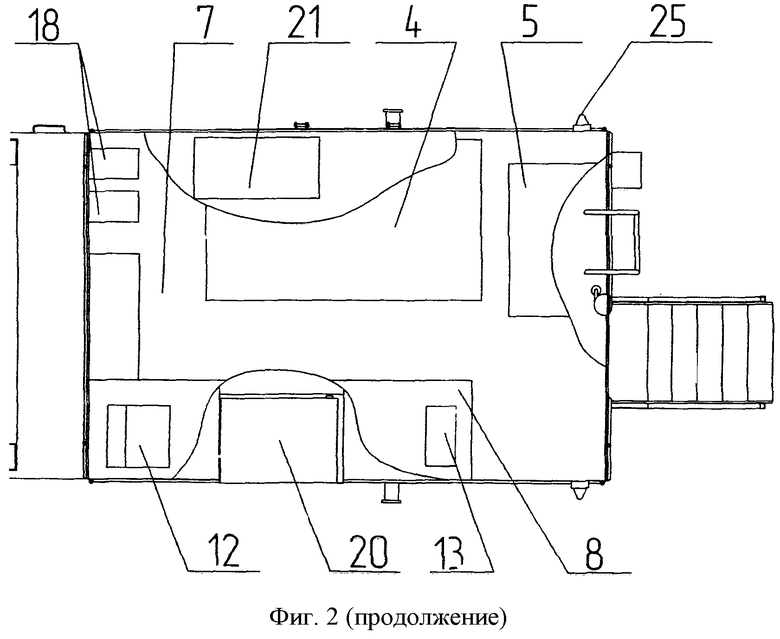
Буферная платформа для транспортирования ракеты-носителя содержит смонтированную на приводной 1 и неприводной 2 тележках раму 3, дизельную электростанцию 4, компрессорную станцию 5 и кузов 6 с отсеком 7 для электрооборудования и кабиной управления 8. Рама 3, выполненная каркасного типа, состоит из двух разновысоких частей: передней, низкорасположенной части М, на которой установлена защитная арочная ферма 9 и закреплено автосцепное устройство 10, соединяющее платформу с передней тележкой транспортно-установочного агрегата (не показан), и задней, высокорасположенной части N, на которой оборудована площадка 11 под установку агрегатов транспортной системы термостатирования ракеты-носителя (не показан). Также на задней части N рамы расположен кузов 6 с отсеком 7 и кабиной управления 8, включающей стационарный пульт управления 12 платформой и стационарный пульт управления 13 аппаратурой транспортной системы термостатирования, не входящей в состав платформы.
Под передней частью М рамы 3 установлена двухосная неприводная тележка 2, обеспечивающая возможность прохождения платформой криволинейных участков рельсового пути, а под задней частью N размещена приводная тележка 1 в виде 2-х колесных пар 14 с электродвигателями 15 переменного либо постоянного тока. Кроме того, под задней частью N рамы 3 смонтирован кронштейн 16, несущий на себе два бесконтактных индуктивных датчика 17, обеспечивающих управляемое снижение скорости движения платформы перед остановкой и включение тормозной системы в момент остановки. В отсеке 7 кузова 6 размещены частотные преобразователи 18, регулирующие скорость передвижения платформы и работающие по командам от программируемого контроллера (не показаны).
При этом защитная арочная ферма 9 выполнена секционной и размещена над консольно-нависающей над платформой носовой частью ракеты-носителя (не изображена).
В заявляемой буферной платформе колесные пары 14 приводной тележки 1 являются одновременно тихоходными валами редукторов, которые снабжены устройствами разрыва кинематической связи, выполненными в виде, например, сцепных муфт, и автономной системой централизованной смазки. Кроме того, платформа снабжена выносным пультом управления, состоящим из блока контроля и управления, включающего в себя переключатель направления движения, сигнальные лампы и кнопки пуска и остановки, и гибким кабелем с разъемом, подсоединяемым к одному из двух постов управления 19, расположенных в передней М и задней N частях рамы 3.
А кабина управления 8 с размещенными в ней стационарными пультами управления 12 и 13 оснащена системой кондиционирования воздуха с функцией его частичной очистки 20 и в ней (кабине) установлена вытяжная вентиляция 21, обеспечивающая выброс нагретого воздуха из отсека 7 электрооборудования и поступление свежего воздуха внутрь кузова 6.
При этом под низкорасположенной частью М рамы 3 размещены трубопроводы пневмосистемы торможения и электрокабели, а на высокорасположенной части N рамы смонтирован кронштейн 22, на котором закреплена лестница 23 для выполнения аварийных работ. Буферная платформа также снабжена сигнальным 24 и осветительным 25 оборудованием, смонтированным снаружи рамы 3 и кузова 6.
Работа по транспортировке ракеты-носителя на стартовую позицию с помощью самоходной буферной платформы осуществляется следующим образом.
После окончания выполнения операций подготовки транспортно-установочного агрегата (ТУА) и самоходной буферной платформы оператор стационарного пульта управления (СПУ) 12 запускает дизельную электростанцию (ДЭС) 5 и осуществляет стыковку платформы с ТУА в движении со скоростью до 0,5 км/час в сторону монтажно-испытательного комплекса (МИК) ракеты-носителя.
Сцеп платформы с ТУА входит в ворота МИКа, проходя через датчики 17 устройства точной остановки, и автоматически останавливается. После чего оператор СПУ 12 переводит платформу в режим «Движение без ТУА».
После переключения режима управления оператор с выносным пультом управления (ВПУ) вручную при помощи рычага размыкает автосцепку 10, приводит платформу в движение от ТУА со скоростью до 0,12 км/час и она движется до назначенного места, где и останавливается, а оператор СПУ 12 выключает ДЭС 5.
После завершения работ по подготовке ракеты в МИКе и получения команды оператор СПУ 12 запускает ДЭС 5, а оператор ВПУ приводит платформу в движение в сторону МИКа, заводя ее в него. Платформа движется до срабатывания датчиков 17 устройства точной остановки и останавливается примерно в 30 мм до точки стыковки.
После этого оператор ВПУ подключает гибкий электрокабель и трубопровод пневмосистемы к ТУА, а оператор СПУ 12 переключает управление на режим «Движение с ТУА». После команды на начало движения оператор ВПУ на скорости до 0,12 км/час производит стыковку платформы с ТУА и, продолжая движение, выводит сцеп платформы с ТУА из здания МИКа, осуществляя его остановку.
Затем оператор СПУ 12 переводит платформу в режим «Управление с СПУ», а оператор ВПУ отсоединяет свой пульт. После получения команды на движение оператор СПУ 12 приводит сцеп платформы с ТУА в движение в сторону стартовой позиции со скоростью до 2 км/час. Оператор ВПУ при движении этого сцепа идет рядом, находясь справа от хвостового отсека ракеты, и при возникновении нештатной ситуации он по связи подает команду оператору СПУ 12 на аварийную остановку.
При подходе платформы с ТУА к грузоподъемному средству срабатывает датчик 17 устройства точной остановки и сцеп платформы с ТУА переходит в режим торможения. За заданное программой время скорость уменьшается с 2 до 0,12 км/час. После прохождения платформы над вторым датчиком 17 срабатывают колодочные тормоза платформы. Сцеп платформы с ТУА останавливается в заданной точке. Оператор ВПУ рычагом автосцепки 10 расцепляет платформу и ТУА.
Оператор СПУ 12 переводит платформу в режим работы «Движение без ТУА». В этом положении воздух из магистрали выбрасывается, тележка ТУА затормаживается. Напряжение на кабеле отключается, а оператор ВПУ отсоединяет трубопровод пневмосистемы от ТУА, а затем отсоединяет электрокабель.
Использование предлагаемого изобретения позволяет значительно улучшить качество выполнения операций по обеспечению надежной и безопасной транспортировки ракеты-носителя на стартовую позицию, исключив при этом влияние человеческого фактора (ошибки, медленная, замедленная реакция, невнимательность и др.), а также обеспечить точную остановку и маневрирование платформы для последующей установки на транспортно-установочный агрегат в исходное положение с грузоподъемным агрегатом и осуществлять все указанные операции в автоматическом режиме управления и контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАРТОВЫЙ КОМПЛЕКС ДЛЯ ПРЕДСТАРТОВОЙ ПОДГОТОВКИ И ПУСКА РАКЕТЫ-НОСИТЕЛЯ С КОСМИЧЕСКОЙ ГОЛОВНОЙ ЧАСТЬЮ | 2006 |
|
RU2318707C1 |
| СТАРТОВЫЙ КОМПЛЕКС ДЛЯ ПРЕДСТАРТОВОЙ ПОДГОТОВКИ И ПУСКА РАКЕТЫ-НОСИТЕЛЯ С КОСМИЧЕСКОЙ ГОЛОВНОЙ ЧАСТЬЮ (ВАРИАНТЫ) | 2006 |
|
RU2318706C1 |
| ПОДВИЖНЫЙ ПУНКТ ЦЕЛЕУКАЗАНИЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2480705C2 |
| ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР | 2007 |
|
RU2350885C1 |
| ТРАНСПОРТНО-ЗАРЯЖАЮЩАЯ МАШИНА | 2000 |
|
RU2194234C2 |
| ТЕХНИЧЕСКИЙ КОМПЛЕКС КОСМОДРОМА ДЛЯ ПОДГОТОВКИ К ПУСКУ НА СТАРТОВОМ КОМПЛЕКСЕ РАКЕТ-НОСИТЕЛЕЙ | 2011 |
|
RU2479472C2 |
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА | 2007 |
|
RU2343390C1 |
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА | 2005 |
|
RU2312294C2 |
| Способ подготовки твердотопливной ракеты космического назначения для запуска космического аппарата и наземный стартовый подвижный ракетно-космический комплекс для его осуществления, способ сборки головного блока и комплект транспортно-технологического оборудования для его осуществления | 2023 |
|
RU2813395C1 |
| СПОСОБ ПОДГОТОВКИ СТАРТОВОЙ ПЛОЩАДКИ ДЛЯ ЗАПУСКА РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И НАЗЕМНОЕ ОБОРУДОВАНИЕ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 1994 |
|
RU2094337C1 |
Изобретение относится к транспортному машиностроению, в частности к рельсовому транспорту для перевозки длинномерных грузов, а именно ракеты-носителя космических аппаратов. Самоходная буферная платформа содержит смонтированную на приводной и неприводной тележках раму, дизельную электростанцию, компрессорную станцию, кузов с отсеком для электрооборудования и кабиной управления. Рама состоит из двух разновысоких частей: передней, низкорасположенной части, на которой установлена защитная арочная ферма и закреплено автосцепное устройство, соединяющее платформу с передней тележкой транспортно-установочного агрегата, и задней, высокорасположенной части, оборудованной площадкой под установку агрегатов транспортной системы термостатирования ракеты-носителя, и на ней расположен кузов с отсеком для электрооборудования и кабиной управления со стационарными пультами управления. Защитная арочная ферма выполнена секционной и размещена над консольно-нависающей над платформой носовой частью ракеты-носителя. Под задней частью рамы смонтирован кронштейн, несущий датчики, обеспечивающие управляемое снижение скорости движения платформы. Изобретение улучшает качество выполнения операций транспортировки ракеты-носителя на стартовую позицию и обеспечивает точную остановку и маневрирование платформы. 6 з.п. ф-лы, 3 ил.
1. Самоходная буферная платформа, преимущественно для транспортирования ракеты-носителя, расположенной на транспортно-установочном агрегате, на стартовую позицию, содержащая смонтированную на приводной и неприводной тележках раму, дизельную электростанцию, компрессорную станцию, кузов с отсеком для электрооборудования и кабиной управления, отличающаяся тем, что выполненная в виде каркаса рама состоит из двух разновысоких частей: передней, низкорасположенной части, на которой установлена защитная арочная ферма и закреплено автосцепное устройство, соединяющее платформу с передней тележкой транспортно-установочного агрегата, и задней, высокорасположенной части рамы, на которой оборудована площадка под установку агрегатов транспортной системы термостатирования ракеты-носителя и расположен кузов с отсеком для электрооборудования и кабиной управления со стационарными пультами управления, причем под передней частью рамы установлена двухосная неприводная тележка, обеспечивающая возможность прохождения платформой криволинейных участков рельсового пути, а под задней частью рамы установлена приводная тележка в виде 2-х колесных пар с электродвигателями переменного либо постоянного тока и смонтирован кронштейн, несущий на себе два бесконтактных индуктивных датчика, обеспечивающих управляемое снижение скорости движения платформы перед остановкой и включение тормозной системы в момент остановки, при этом в отсеке кузова с электрооборудованием размещены частотные преобразователи, регулирующие скорость передвижения платформы и работающие по командам от программируемого контроллера.
2. Самоходная буферная платформа по п.1, отличающаяся тем, что защитная арочная ферма выполнена секционной и размещена над консольно-нависающей над платформой носовой частью ракеты-носителя.
3. Самоходная буферная платформа по п.1, отличающаяся тем, что в ней колесные пары приводной тележки служат одновременно тихоходными валами редукторов, которые снабжены устройствами разрыва кинематической связи и автономной системой централизованной смазки.
4. Самоходная буферная платформа по п.1, отличающаяся тем, что она снабжена выносным пультом управления, состоящим из блока контроля и управления, включающего в себя переключатель направления движения, сигнальные лампы и кнопки пуска и остановки, и гибким кабелем с разъемом, подсоединенным к одному из двух постов управления, расположенных в передней и задней частях рамы.
5. Самоходная буферная платформа по п.1, отличающаяся тем, что кабина управления с размещенными в ней стационарными пультами операторов оснащена системой кондиционирования воздуха с функцией его частичной очистки.
6. Самоходная буферная платформа по п.1, отличающаяся тем, что под низкорасположенной частью рамы размещены трубопроводы пневмосистемы торможения и электрокабели, а на высокорасположенной части рамы смонтирован кронштейн, на котором закреплена лестница для выполнения аварийных работ.
7. Самоходная буферная платформа по п.1, отличающаяся тем, что она снабжена сигнальным и осветительным оборудованием, смонтированным снаружи рамы и кузова.
| ТРАНСПОРТЕР | 1997 |
|
RU2141906C1 |
| CN 201580384 U, 15.09.2010 | |||
| ДУГОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОГО ТОКА | 1934 |
|
SU44610A1 |
| WO 1999014091 A1, 25.03.1999. | |||

