Изобретение относится к области вооружений и может быть использовано во взрывателях различных боеприпасов, для определения расстояния между телами.
Известен способ определения наличия цели на заданном расстоянии посредством зондирования пространства одним световым лучом и регистрации отраженного излучения двумя приемниками: основным и дополнительным. Амплитуды сигналов, регистрируемые основным и дополнительным фотоприемниками, сравниваются. В случае когда амплитуда сигнала зарегистрированного основным фотоприемником превышает амплитуду сигнала зарегистрированного дополнительным фотоприемником, подается команда на инициирование заряда (Заявка Франции №2655140, МПК F42C 13/02, опубл. 10.05.91).
Данному способу присущи следующие недостатки: отсутствие защиты срабатывания от случайных малоразмерных помех в виде веток, капель дождя и т.п. и существенные отклонения в определении величины дистанции до цели.
Известен способ неконтактного подрыва заряда боеприпаса на заданном расстоянии от цели, реализованный в неконтактном оптическом взрывателе, основанный на обнаружении цели посредством зондирования пространства двумя световыми лучами и регистрации отраженного излучения двумя приемниками, с последующим анализом сигналов регистрируемых приемниками. Путем нескольких последовательных во времени измерений каждым приемником определяют расстояние до цели и при равенстве этих расстояний подают сигнал на инициирование заряда (Заявка ЕПВ №0335132 от 04.10.89, МПК F42C 13/02 - прототип).
Данный способ обеспечивает защиту от случайных малоразмерных помех, в силу того что малоразмерная помеха не может быть зарегистрирована одновременно двумя приемниками.
Основным недостатком данного способа является невозможность обеспечения высокой точности дистанции подрыва заряда при использовании в некоторых видах боеприпасов, а также значительные габариты и вес устройства, необходимого для реализации указанного способа.
Задачей, стоящей в данной области техники и на решение которой направлено предлагаемое техническое решение, является создание способа определения расстояния между телами с высокой точностью, позволяющего минимизировать габаритно-весовые характеристики данного устройства.
Решение указанной задачи достигается за счет того, что определение заданного расстояния между телами основано на обнаружении одним телом другого тела посредством зондирования пространства световыми импульсами и регистрации отраженного излучения с последующим анализом регистрируемых сигналов. Идентификацию одним телом второго тела осуществляют по регистрации отраженного импульса в установленный временной промежуток, характеризующий заданное расстояние между телами. Излучение зондирующих световых импульсов осуществляют одним излучателем, а регистрацию отраженного излучения - одним приемником, установленными на одном теле, причем излучение световых импульсов направляют параллельно отрезку, соединяющему два тела, и регистрацию осуществляют через временной интервал, характеризующий расстояние между телами, с момента излучения светового импульса до открытия временного окна, продолжительностью которого задают погрешность определения дистанции.
В варианте применения способа для исключения идентификации случайных помех излучают установленную серию световых импульсов в течение заданного временного интервала, в случае регистрации отраженных сигналов всех излученных световых импульсов текущей серии и при условии регистрации конечного отраженного сигнала в тестовом временном окне формируют сигнал об идентификации тела.
В варианте применения способа для исключения идентификации тела при движении тел в среде с высокой отражательной способностью (например, туман) излучение зондирующих световых импульсов одновременно осуществляют двумя или более излучателями, а регистрацию отраженного излучения - двумя или более соответствующими каждому излучателю приемниками, причем пары «излучатель-приемник» устанавливают предпочтительно диаметрально противоположно относительно направления движения тела с излучателями. В случае регистрации отраженных сигналов во временном интервале текущей серии двумя и более противоположно расположенными приемниками сигнал идентификации тела по результатам текущей серии не формируют.
Алгоритм излучения зондирующих импульсов и их регистрации задается из условий обеспечения идентификации тела минимальных размеров, но игнорирования малоразмерных помех типа веток, капель дождя и т.д.
Предложенный способ позволяет минимизировать габаритно-весовые характеристики устройства для определения расстояния между телами, а также обеспечить устойчивость устройства к воздействию малоразмерных помех.
Проведенный поиск не выявил технические решения, совокупность признаков которых совпадает с совокупностью признаков заявляемого способа определения расстояния между телами, в том числе с отличительными признаками. Эта новая совокупность признаков является новым техническим решением, которое обеспечивает получение технического результата - возможность определения с высокой точностью расстояния между телами, с обеспечением устойчивости устройства к воздействию малоразмерных помех. Предложенное решение не следует явным образом для специалиста из достигнутого уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения критерию "изобретательский уровень".
Сущность изобретения иллюстрируется чертежом, где на фиг.1 показаны графики синхронизирующего импульса СИ, зондирующего импульса ЗИ, отраженного сигнала ОС и временного окна.
Предложенный способ определения расстояния между телами реализуется следующим образом: тело излучает световые импульсы по направлению движения, при наличии другого тела на заданном расстоянии отраженное излучение регистрируется фотоприемником. Световые импульсы заданной продолжительности излучают через определенные интервалы времени, причем в каждом последующем интервале учитывают предшествующую временную задержку между излучением сигнала и регистрацией отраженного излучения.
Временная задержка подачи следующего светового импульса tзд определяется как сумма предыдущих задержек между подачей светового импульса и его регистрацией:
где tздn- временная задержка подачи следующего светового импульса;
τздi- предыдущая задержка между подачей светового импульса и его регистрацией.
Отсчет задержек производят от служебных синхронизирующих импульсов. Тело идентифицируют в случае регистрации всех излученных импульсов и в том числе регистрации конечного импульса в тестовом временном окне. Расположением временного окна от начала излучения конечного импульса определяют заданное расстояние между телами, а величина временного окна определяется разрешением системы и задает точность определения дистанции.
Использование предложенного технического решения позволяет минимизировать габаритно-весовые характеристики и энергопотребление устройства, обеспечивающего определение расстояния, и в то же время обеспечить высокую точность определения расстояние между телами с возможностью защиты от воздействия малоразмерных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ ДВУХ ТЕЛ МЕЖДУ СОБОЙ | 2011 |
|
RU2478985C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ БОЕПРИПАСА С ЦЕЛЬЮ | 2011 |
|
RU2477833C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ ДВУХ ТЕЛ, ДВИЖУЩИХСЯ С РАЗЛИЧНОЙ СКОРОСТЬЮ | 2011 |
|
RU2477870C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ЦЕЛИ | 2011 |
|
RU2477869C2 |
| СПОСОБ НЕКОНТАКТНОГО ПОДРЫВА ЗАРЯДА | 2010 |
|
RU2484424C2 |
| СПОСОБ НЕКОНТАКТНОГО ПОДРЫВА ЗАРЯДА | 2010 |
|
RU2442956C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕКОНТАКТНОГО ДАТЧИКА ЦЕЛИ | 2011 |
|
RU2478184C2 |
| ОПТИЧЕСКИЙ БЛОК ВЗРЫВАТЕЛЯ РЕАКТИВНЫХ СНАРЯДОВ | 2012 |
|
RU2500979C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2012 |
|
RU2496094C1 |
| УСТРОЙСТВО ДЛЯ ПОДРЫВА БОЕПРИПАСА НА ЗАДАННОМ РАССТОЯНИИ ОТ ЦЕЛИ | 2012 |
|
RU2498207C1 |
Способ может быть использован для определения заданного расстояния между телами при сближении. Способ основан на обнаружении объекта посредством светового импульсного излучения и регистрации отраженного излучения с последующим анализом. Определение заданного расстояния между телами осуществляют при помощи одного излучателя и одного приемника, размещенных на одном теле. Установленную серию световых импульсов излучают в течение заданного временного интервала и определяют заданное расстояние между телами в случае регистрации отраженных сигналов, соответствующих всем излученным световым импульсам текущей серии, и при условии регистрации конечного отраженного сигнала серии в тестовом временном окне, расположением которого задают определяемую дистанцию между телами, а его продолжительностью устанавливают погрешность определения расстояния. При этом время излучения каждого последующего импульса рассчитывают с учетом предшествующих временных задержек, определяемых как временные промежутки от момента излучения каждого импульса и до момента регистрации соответствующего отраженного сигнала. Технический результат заключается в обеспечении возможности минимизации габаритно-весовых характеристик устройства и его энергопотребления, а также в обеспечении высокой точности определения расстояния между телами с возможностью защиты от воздействия малоразмерных помех. 1 ил.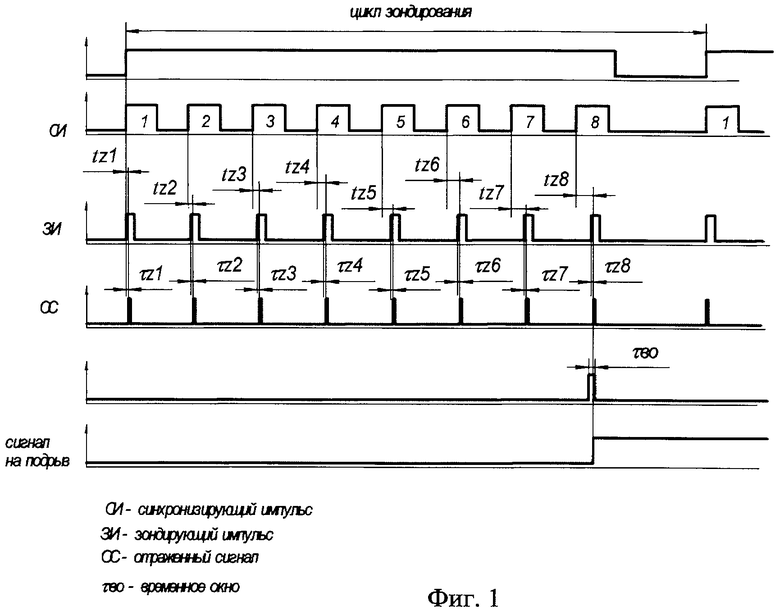
Способ определения расстояния между телами, основанный на обнаружении объекта посредством светового импульсного излучения и регистрации отраженного излучения с последующим анализом, отличающийся тем, что определение заданного расстояния между телами осуществляют при помощи одного излучателя и одного приемника, размещенных на одном теле, излучают установленную серию световых импульсов в течение заданного временного интервала и определяют заданное расстояние между телами в случае регистрации отраженных сигналов, соответствующих всем излученным световым импульсам текущей серии, и при условии регистрации конечного отраженного сигнала серии в тестовом временном окне, расположением которого задают определяемую дистанцию между телами, а его продолжительностью устанавливают погрешность определения расстояния, при этом время излучения каждого последующего импульса рассчитывают с учетом предшествующих временных задержек, определяемых как временные промежутки от момента излучения каждого импульса и до момента регистрации соответствующего отраженного сигнала.
| УСТРОЙСТВО ДЛЯ ПРОБИВКИ СВЕТОВОЙ ЛИНИИ В КОРАБЛЯХ | 1941 |
|
SU68708A1 |
| US 2009002680 A1, 01.01.2009 | |||
| US 2009078817 A1, 26.03.2009 | |||
| EP 1903301 A2, 26.03.2008 | |||
| ОПТИЧЕСКИЙ БЛОК ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛИ | 1998 |
|
RU2151372C1 |

