Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству обработки сигнала, способу обработки сигнала и приемной системе. Более конкретно, изобретение относится к устройству обработки сигнала, способу обработки сигнала и приемной системе, предназначенным для быстрой и с требуемой точностью оценки ошибок несущей, используемых, например, для демодуляции сигнала OFDM (мультиплексирование с ортогональным частотным разделением).
Описание предшествующего уровня техники
В наземных системах цифровой широковещательной передачи и в подобных системах широковещательной передачи применяют OFDM (мультиплексирование с ортогональным частотным разделением) в качестве способа модуляции данных (то есть, сигнала).
В соответствии с OFDM, множество ортогональных поднесущих предусмотрено в пределах полосы пропускания, причем каждой поднесущей назначают данные, относящиеся к ее амплитуде и фазе для цифровой модуляции, такой как PSK (фазовая манипуляция) и QAM (квадратурная амплитудная модуляция).
В соответствии с OFDM, полоса пропускания разделена на большое количество поднесущих. Это означает, что для каждой поднесущей полоса пропускания узкая, и скорость модуляции низкая. Однако, при этом достигается такая же общая скорость передачи данных (по всем поднесущим), как при использовании обычных способов модуляции.
Поскольку данные, в соответствии с OFDM, выделяют для множества поднесущих, как указано выше, модуляция данных может быть выполнена с использованием вычисления IFFT (обратное быстрое преобразование Фурье). Сигнал OFDM, получаемый в результате такой модуляции, может быть демодулирован путем вычисления FFT (быстрое преобразование Фурье).
Отсюда следует, что передающее устройство, предназначенное для передачи сигнала OFDM, может состоять из схем, выполняющих вычисление IFFT, а приемное устройство, предназначенное для приема сигнала OFDM, может быть выполнено из схем, выполняющих вычисление FFT.
В соответствии с OFDM фрагменты сигнала, называемые защитными интервалами, предусмотрены для улучшения устойчивости к многолучевой интерференции. Кроме того, в соответствии с OFDM, пилотные сигналы (то есть, сигналы, известные устройству приема), время от времени вставляют для указания времени, а также для указания частоты. Эти пилотные сигналы используются устройством приема для синхронизации и для оценки характеристик канала передачи.
Из-за высокой устойчивости к многолучевой интерференции OFDM используют, в частности, для наземной цифровой широковещательной передачи, которая чувствительна к воздействию многолучевой интерференции. Стандарты наземной цифровой широковещательной передачи, в которых используется OFDM, включают, например, DVB-T (Цифровое видеовещание - наземное) и ISDB-T (Комплексная служба цифрового вещания - наземная).
В соответствии с OFDM данные передают блоками, называемыми символами OFDM.
Обычно символ OFDM образуют из эффективных символов, которые составляют период сигнала, в течение которого выполняют IFFT, используя модуляцию, и защитного интервала, составленного из частичного сигнала последней половины эффективных символов, которые копируют без изменения в начало эффективных символов.
Защитный интервал, присоединенный к началу символа OFDM, помогает повысить устойчивость к многолучевой интерференции.
Стандарты наземной цифровой широковещательной передачи, в которых используют OFDM, определяют модуль, называемый фреймом (фрейм передачи OFDM), который состоит из множества символов OFDM. Данные затем передают в единицах фреймов.
Устройство приема, предназначенное для приема описанного выше сигнала OFDM, использует несущую сигнала OFDM для обеспечения цифровой ортогональной демодуляции сигнала OFDM.
Обычно, однако, несущая сигнала OFDM, используемая в устройстве приема для цифровой ортогональной демодуляции, не совпадает с несущей сигнала OFDM, используемой устройством передачи, передающим сигнал OFDM; несущая содержит ошибки. А именно, частота сигнала OFDM, используемая для цифровой ортогональной демодуляции, сдвинута относительно центральной частоты сигнала OFDM (то есть, ее сигнала IF (промежуточной частоты)), принимаемого устройством приема.
По этой причине, устройство приема выполнено с возможностью выполнения двух процессов: процесса детектирования величины сдвига несущей, предназначенного для детектирования величины сдвига несущей, которая представляет собой ошибку несущей сигнала OFDM, используемого для цифровой ортогональной демодуляции, и процесса коррекции (то есть, коррекции смещения) для коррекции сигнала OFDM таким образом, чтобы устранить величину сдвига несущей.
В то же время, разрабатывается стандарт DVB-T2 (Цифровое телевидение - второе поколение, наземное в Европе) в качестве стандарта наземной цифровой широковещательной передачи, при которой используют OFDM.
Так называемая публикация BlueBook (DVB BlueBook A122) описывает DVB-Т2 ("Frame structure channel coding and modulation for a second generation digital terrestrial television broadcasting system (DVB-T2)," DVB Document A122, июнь 2008 г.; называемая ниже Непатентным документом 1).
В соответствии с DVB-T2 (как описано в BlueBook), определяют фрейм, называемый фреймом Т2. Данные передают в единицах фреймов Т2.
Фрейм Т2 (представляющий сигнал OFDM) включает в себя два сигнала преамбулы, называемые Р1 и Р2, которые содержат информацию, необходимую для таких процессов, как демодуляция сигнала OFDM.
На фиг.1 схематично показан вид, представляющий формат фрейма Т2. Фрейм Т2 содержит символы Р1, символы Р2 и символы данных, в указанном порядке.
Символы Р1 представляют собой символы, предназначенные для передачи сигналов Р1, включающих в себя тип передачи и основные параметры передачи.
Более конкретно, сигналы Р1 (символы Р1) включают в себя параметры S1 и S2, указывающие, передаются ли символы Р2, используя способ SISO (один вход, один выход (что означает одну передающую и одну приемную антенны)) или способ MISO (множество входов, один выход (что означает множество передающих антенн, но одну приемную антенну)). Параметры также указывают размер FFT (то есть, количество выборок (символов), подвергаемых одному вычислению FFT) для выполнения вычисления FFT для Р2.
Из этого следует, что для демодуляции Р2 может потребоваться предварительное выполнение демодуляции Р1.
Символы Р2 представляют собой символы, предназначенные для передачи предварительных сигналов L1 и последующих сигналов L1.
Предварительные сигналы L1 включают в себя информацию, предназначенную для обеспечения возможности приема и декодирования устройством приема, принимающим фреймы Т2, последующих сигналов L1. Последующие сигналы L1 включают в себя параметры, требуемые устройством приема при получении доступа к физическому уровню (то есть, к каналам физического уровня).
Один фрейм Т2 может иметь Р2, состоящий из 1-16 символов OFDM, расположенных в нем.
Символы Р1 и Р2 включают в себя известные пилотные сигналы. В частности, пилотные сигналы Р1 расположены на поднесущих, которые не размещены периодически, в то время как пилотные сигналы Р2 расположены на поднесущих, которые размещены периодически. Среди пилотных сигналов те, которые расположены периодически через интервалы, состоящие из заданного количества поднесущих (символов), называются SP (рассеянными пилотными) сигналами; пилотные сигналы, расположенные на поднесущих одной частоты, называются СР (последовательными пилотными) сигналами.
Кроме того, устройство приема выполняет расчет FFT сигнала OFDM на символ OFDM. DVB-T2 определяет шесть размеров FFT - 1K, 2K, 4K, 8K, 16K и 32K, причем каждый размер FFT представляет собой количество символов (поднесущих), составляющих один символ OFDM.
Промежуток между поднесущими символов OFDM (то есть, расстояние между поднесущими) обратно пропорционален размеру FFT символа OFDM. Таким образом, в соответствии с DVB-T2, определение размера FFT эквивалентно заданию промежутка между поднесущими.
В DVB-T2 также предусмотрено, что из шести упомянутых выше размеров FFT 1К следует использовать для символов OFDM Р1. Кроме того, предусмотрено, что для Р2 и других символов OFDM, кроме Р1, можно использовать любой один из шести размеров FFT, указанных выше.
Отсюда следует, что в отношении символов OFDM P1 используют исключительно поднесущие, имеющие самый широкий промежуток между поднесущими (соответствует размеру FFT 1K), определенный в соответствии с DVB-T2.
Что касается Р2 и других символов OFDM, кроме Р1, то есть, символ OFDM P2 и символ OFDM данных (Нормальный), становится возможным использовать не только поднесущие, имеющие самый широкий промежуток между поднесущими, определенный в соответствии с DVB-T2, но также и поднесущие, имеющие другой промежуток между поднесущими, кроме самого широкого промежутка между поднесущими (то есть, любой один из промежутков, соответствующих размерам FFT 2K, 4K, 8K, 16K и 32K).
На фиг.2 показан схематичный вид, представляющий сигнал OFDM Р1.
Сигнал OFDM P1 имеет 1K (=1024) символов в качестве своих эффективных символов.
Этот сигнал имеет циклическую структуру, в которой начальная часть А1 эффективных символов А сдвинута по частоте к сигналу С, скопированному перед эффективными символами, а остальная часть А2 эффективных символов А сдвинута по частоте к сигналу В, скопированному позади эффективных символов.
Сигнал OFDM P1 имеет 853 поднесущие в качестве своих эффективных поднесущих. В соответствии с DVB-T2 информация расположена на 384 поднесущих из 853 поднесущих.
Рекомендации по реализации DVB-T2 (ETSI TR 102831: IG) определяют, что, если полоса пропускания для передачи сигнала OFDM, например, составляет 8 МГц, тогда корреляцию размещения информации упомянутых выше 384 поднесущих в отношении сигнала OFDM P1 можно использовать для оценки "грубого" смещения частоты несущей с точностью до ±500 кГц.
В рекомендациях по реализации также упоминается, что в случае P1, пояснявшуюся выше со ссылкой на фиг.2 циклическую структуру можно использовать для оценки "тонкого" смещения несущей частоты с точностью до величины ±0,5, умноженной на промежуток между поднесущими.
В DVB-T2 предусмотрено, что размер FFT P1 должен составлять 1K выборок (символов), как упомянуто выше.
В DVB-T2 также предусмотрено, что, если полоса пропускания, например, составляет 8 МГц, тогда период дискретизации для P1 с размером FFT 1К выборок должен составлять 7/64 мкс.
Таким образом, когда полоса пропускания, например, составляет 8 МГц, эффективная длина Tu символа для P1 составляет 1024×7/64 мкс.
В то же время, существует взаимосвязь, определенная выражением D=1/Tu, где Tu (в секундах) обозначает длину эффективных символов среди символов OFDM (то есть, длину эффективного символа, исключая защитные интервалы), а D (Гц) представляет промежуток между поднесущими для поднесущих сигнала OFDM.
Таким образом, если полоса пропускания составляет 8 МГц, промежуток D между поднесущими для поднесущих P1 приблизительно составляет 8929 Гц, что представляет собой обратную величину от эффективной длины Tu символов=1024×7/64 мкс.
Как описано выше, поскольку промежуток D между поднесущими P1 составляет приблизительно 8929 Гц, "тонкую" величину сдвига несущей можно оценить, используя P1 с точностью до ±8929/2 Гц.
В этом случае, диапазон захвата P1, то есть, диапазон, в котором несущая сигнала OFDM, используемая для цифровой ортогональной демодуляции, может быть захвачена путем коррекции сигнала OFDM в соответствии с "тонкой" величиной сдвига несущей, полученной из Р1, находится в пределах ±8929/2 Гц (между -8929/2 Гц и +8929/2 Гц) относительно истинного значения несущей сигнала OFDM.
Учитывая оценку величины сдвига несущей, полученную с помощью Р1 с размером FFT 1K, становится возможным выполнить захват несущей символов OFDM, имеющих размер FFT 1K, в диапазоне ±0,5 × промежуток D между поднесущими, в результате чего демодулируют символы OFDM.
Сущность изобретения
Однако, что касается символов OFDM, имеющих другой размер FFT, отличный от 1K, то есть, символов OFDM с размером FFT 2K, 4K, 8K, 16K или 32K, может не быть невозможным выполнять захват несущей в диапазоне ±0,5 × промежуток D между поднесущими в зависимости от оценки величины сдвига несущей с помощью Р1 с размером FFT 1K.
Например, если полоса пропускания составляет 8 МГц, промежуток D между поднесущими для символов OFDM с размером FFT 32K составляет 279 Гц.
Из этого следует, что даже если несущая может быть захвачена в диапазоне ±8,929/2 Гц на основе оценки величины сдвига несущей с помощью Р1 с размером FFT 1K, величина сдвига несущей (то есть, его значение) может все еще превышать 279 Гц умноженных на ±0,5, составляющих промежуток D между поднесущими для символов OFDM с размером FFT 32K.
Как описано выше, невозможно демодулировать символы OFDM при наличии величины сдвига несущей (одной поднесущей или более), превышающей промежуток D между поднесущими для символов OFDM, умноженный на ±0,5.
В среде, где существуют такие внешние возмущения, как многолучевая интерференция или незатухающие волны (CW), проявляется тенденция ошибочного детектирования Р1. Если ошибочно детектированный Р1 используют для оценки "тонкой" величины сдвига несущей, получаемая точность существенно ухудшается. В результате, существует высокая вероятность того, что символы OFDM с размером FFT 2K, 4K, 8K, 16K или 32K не будут демодулированы.
Как отмечено выше, в отношении символов OFDM с размером FFT 2K, 4K, 8K, 16K или 32K, возникают случаи, в которых символы OFDM могут не быть демодулированы из-за невозможности захвата несущей в диапазоне ±0,5, умноженном на промежуток D между поднесущими, в зависимости от оценки величины сдвига несущей, полученной с помощью Р1 с размером FFT 1K.
Для захвата несущей в диапазоне ±0,5, умноженном на промежуток D между поднесущими в отношении символов OFDM с размером FFT 2K, 4K, 8K, 16K или 32K, может потребоваться выполнить оценку "грубой" величины сдвига несущей для каждого из размеров FFT 2K, 4K, 8K, 16K и 32K, в дополнение к оценке величины сдвига несущей, полученной используя Р1.
Рекомендации по реализации вводят общие способы для оценки "грубой" величины сдвига несущей для каждого размера FFT, например, в соответствии с DVB-T (Цифровое телевидение - наземное в Европе).
В частности, в рекомендациях по реализации раскрыт способ оценки смещения несущей частоты, используя места расположения сигналов СР, а также способ оценки смещения несущей частоты, в котором используются импульсные отклики сигналов SP.
После захвата несущей в диапазоне ±0,5, умноженном на промежуток D между поднесущими в отношении символов OFDM с каждым размером FFT, оценка "тонкой" величины сдвига несущей относительно каждого размера FFT может быть получена, например, с использованием коррелятора, который использует длину защитного интервала, или коррелятора, который использует разность фаз в направлении символов OFDM сигналов СР (в направлении времени).
В то же время, устройство приема, предназначенное для приема сигнала OFDM в соответствии с DVB-T2, демодулирует сигнал Р1 и выполняет оценку длины защитного интервала во фрейме Т2, в котором вначале был детектирован Р1 во время так называемого сканирования канала.
Затем устройство приема распознает размер FFT для сигнала Р2 для детектирования начального местоположения для расчета FFT (местоположение запуска окна FFT) для Р2 в следующем фрейме Т2. Устройство приема затем выполняет расчет FFT для Р2 для получения сигнала OFDM в частотной области. После того как начинают получать сигнал OFDM в частотной области, становится возможным демодулировать предварительные сигналы L1 (фиг.1), включенные в Р2, после чего следует демодуляция данных.
Предположим теперь, что размер FFT для Р2 составляет 2K, 4K, 8K, 16K или 32K, то есть, промежуток между несущими Р2 уже, чем у Р1, и что точность оценки величины сдвига несущей с помощью Р1 упала. В таком случае может быть необходимым выполнить оценку "грубой" величины сдвига несущей для размера FFT сигнала Р2 для коррекции сигнала OFDM.
Например, фрейм Т2 может содержать два или больше символа Р2. В таком случае можно выполнить оценку "грубой" величины сдвига несущей для размера FFT Р2 на основе корреляции между двумя соседними символами Р2.
Однако, если фрейм Т2 содержит только один символ Р2, тогда, очевидно, корреляция между двумя соседними символами Р2 не может быть получена. В таком случае "грубую" величину сдвига несущей нельзя оценить на основе двух соседних символов Р2 до тех пор, пока не будет передан фрейм Т2, включающий в себя, по меньшей мере, два символа Р2.
В то же время оценка "грубой" величины сдвига несущей в отношении размера FFT символа Р2 может быть получена, например, используя места расположения сигналов СР.
В соответствии с DVB-T2 определяют восемь схем мест расположения сигналов СР. Предварительные сигналы L1 в символе Р2 (фиг.1) включают в себя информацию о том, какая из восьми схем мест расположения сигналов СР соответствуют схеме мест расположения сигналов СР, содержащейся в представляющем интерес сигнале OFDM. Таким образом, когда предварительные сигналы L1 нельзя демодулировать при сканировании канала, невозможно применить способ оценки смещения несущей частоты на основе мест расположения сигналов СР.
Настоящее изобретение было разработано с учетом описанных выше обстоятельств и обеспечивает устройство обработки сигнала, способ обработки сигнала и приемную систему для быстрой оценки величины сдвига несущей с требуемой точностью.
При выполнении настоящего изобретения и в соответствии с одним вариантом его выполнения предусмотрено устройство обработки сигнала, включающее в себя: средство обработки для выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала мультиплексирования с ортогональным частотным разделением, известного как сигнал OFDM; и средство коррекции, предназначенное для коррекции сигнала OFDM в соответствии с величиной сдвига несущей; причем сигнал OFDM включает в себя: сигнал первой преамбулы, включающий в себя поднесущие; и сигнал второй преамбулы, включающий в себя поднесущие, промежуток между которыми уже, чем промежуток между поднесущими, включенными в сигнал первой преамбулы; при этом сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; причем средство обработки детектирует величину сдвига несущей, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
В соответствии с другим вариантом выполнения настоящего изобретения, предложен способ обработки сигнала, включающий в себя следующие этапы: обеспечивают выполнение устройством обработки сигнала обработки процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала мультиплексирования с ортогональным частотным разделением, известного как сигнал OFDM; и обеспечивают выполнение устройством обработки сигнала коррекции сигнала OFDM в соответствии с величиной сдвига несущей; причем сигнал OFDM включает в себя: сигнал первой преамбулы, включающий в себя поднесущие; и сигнал второй преамбулы, включающий в себя поднесущие, промежуток между которыми уже, чем промежуток между поднесущими, включенными в сигнал первой преамбулы; при этом сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; причем в процессе детектирования величины сдвига несущей детектируют величину сдвига несущей, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
В соответствии с еще одним вариантом выполнения настоящего изобретения предложена приемная система, включающая в себя: блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи для сигнала, получаемого через канал передачи, причем процесс декодирования канала передачи включает в себя по меньшей мере процесс коррекции ошибок, возникающих в канале передачи; и блок обработки декодирования источника информации, выполненный с возможностью выполнения процесса декодирования источника информации для сигнала, прошедшего упомянутой процесс декодирования канала передачи, причем процесс декодирования источника информации включает в себя по меньшей мере процесс раскрытия сжатой информации обратно в исходную информацию; при этом сигнал, получаемый через канал передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, получаемый в результате выполнения по меньшей мере кодирования со сжатием для сжатия информации и кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи; причем блок обработки декодирования канала передачи включает в себя: средство обработки для выполнения обработки детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM; и средство коррекции для коррекции сигнала OFDM в соответствии с величиной сдвига несущей; при этом сигнал OFDM включает в себя: сигнал первой преамбулы, включающий в себя поднесущие; и сигнал второй преамбулы, включающий в себя поднесущие, промежутки между которыми уже, чем промежутки между поднесущими, включенными в сигнал первой преамбулы; причем сигнал второй преамбулы включает в себя пилотные сигналы, каждый из которых представляет собой известные сигналы, расположенные через интервалы, составляющие заданное количество поднесущих; при этом средство обработки детектирует величину сдвига несущей, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
В соответствии с еще одним вариантом выполнения настоящего изобретения предложена приемная система, включающая в себя: блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи для сигнала, получаемого через канал передачи, причем процесс декодирования канала передачи включает в себя по меньшей мере процесс коррекции ошибок, возникающих в канале передачи; и блок вывода, выполненный с возможностью вывода изображений и звуков на основе сигнала, прошедшего процесс декодирования канала передачи; при этом сигнал, получаемый через канал передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, получаемый в результате выполнения, по меньшей мере, кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи; причем блок обработки декодирования канала передачи включает в себя: средство обработки для выполнения обработки детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM; и средство коррекции, предназначенное для коррекции сигнала OFDM в соответствии с величиной сдвига несущей; при этом сигнал OFDM включает в себя: сигнал первой преамбулы, включающий в себя поднесущие; и сигнал второй преамбулы, включающий в себя поднесущие, промежуток между которыми уже, чем промежуток между поднесущими, включенными в сигнал первой преамбулы; причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; при этом средство обработки детектирует величину сдвига несущей, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
В соответствии с еще одним вариантом выполнения настоящего изобретения предложена приемная система, включающая в себя: блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи для сигнала, получаемого через канал передачи, причем процесс декодирования канала передачи включает в себя, по меньшей мере, процесс коррекции ошибок, возникших в канале передачи; и блок записи, выполненный с возможностью записи сигнала, прошедшего обработку декодирования канала передачи; при этом сигнал полученный через канал передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, получаемый в результате выполнения, по меньшей мере, кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи; причем блок обработки декодирования канала передачи включает в себя: средство обработки для выполнения обработки детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM; и средство коррекции, предназначенное для коррекции сигнала OPDM в соответствии с величиной сдвига несущей; при этом сигнал OFDM включает в себя: сигнал первой преамбулы, включающий в себя поднесущие; и сигнал второй преамбулы, включающий в себя поднесущие, промежуток между которыми уже, чем промежуток между поднесущими, включенными в сигнал первой преамбулы; причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы, составляющие заданное количество поднесущих; при этом средство обработки детектирует величину сдвига несущей, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
В соответствии с еще одним вариантом выполнения настоящего изобретения предложена приемная система, включающая в себя: средство получения, предназначенное для получения сигнала через канал передачи; и блок обработки декодирования канала передачи, выполненный с возможностью выполнения обработки декодирования канала передачи для сигнала, полученного через канал передачи, причем процесс декодирования канала передачи включает в себя, по меньшей мере, процесс коррекции ошибок, возникших в канале передачи; при этом сигнал, полученный через канал передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, полученный в результате выполнения, по меньшей мере, кодирования с коррекцией ошибок для коррекции ошибок, возникших в канале передачи; причем блок обработки декодирования канала передачи включает в себя: средство обработки для выполнения обработки детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM; и средство коррекции для коррекции сигнала OFDM в соответствии с величиной сдвига несущей; при этом сигнал OFDM включает в себя: сигнал первой преамбулы, включающий в себя поднесущие; и сигнал второй преамбулы, включающий в себя поднесущие, промежуток между которыми уже, чем промежуток между поднесущими, включенными в сигнал первой преамбулы; причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы, составляющие заданное количество поднесущих; при этом средство обработки детектирует величину сдвига несущей, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
В случае, когда используют любой из описанных выше в общем виде вариантов выполнения в соответствии с настоящим изобретением, процесс детектирования величины сдвига несущей выполняют для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM (сигнал мультиплексирования с ортогональным частотным разделением). Сигнал OFDM корректируют в соответствии с детектированной величиной сдвига несущей. Сигнал OFDM имеет сигнал первой преамбулы, включающий в себя поднесущие, и сигнал второй преамбулы, включающий в себя поднесущие, промежуток между которыми уже, чем промежуток между поднесущими, включенными в сигнал первой преамбулы. Сигнал второй преамбулы, кроме того, включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы, составляющие заданное количество поднесущих. Величину сдвига несущей детектируют, используя корреляцию поднесущих, включенных в один такой сигнал второй преамбулы.
Устройство обработки сигнала и приемная система в соответствии с настоящим изобретением могут быть выполнены каждое как независимое устройство. В качестве альтернативы, устройство обработки сигнала в соответствии с изобретением и система приема могут представлять собой внутренние блоки или блоки, составляющие часть независимого устройства.
В соответствии с настоящим изобретением, выполненным, как упомянуто выше, оценку величины сдвига несущей можно, например, получать с требуемой точностью и с высокой скоростью.
Краткое описание чертежей
На фиг.1 схематично показан вид, представляющий формат фрейма Т2;
на фиг.2 схематично показан вид, представляющий сигнал OFDM для символа Р1;
на фиг.3 показана блок-схема, представляющая типичную структуру устройства обработки сигнала в качестве одного варианта выполнения настоящего изобретения;
на фиг.4 показана схема, представляющая значения мощности сигнала OFDM в частотной области;
на фиг.5А и 5В показаны схемы, представляющие символ Р2 с нулевой величиной сдвига несущей и символ Р2 с величиной сдвига несущей -1;
на фиг.6А и 6В показаны схемы, представляющие символ Р2, включенный в сигнал OFDM частотной области (то есть, фактический символ Р2), и фактический символ Р2 с поднесущими, подвергнутыми вычислению корреляции несущих;
на фиг.7 показана блок-схема, представляющая типичную структуру блока обработки преамбулы для детектирования величины сдвига несущей с помощью первого способа оценки;
на фиг.8 показана блок-схема последовательности операций, поясняющая процесс детектирования величины сдвига несущей для детектирования величины сдвига несущей с помощью первого способа оценки;
на фиг.9А, 9В, 9С и 9D схематично показаны виды, поясняющие второй способ оценки для оценки величины сдвига несущей;
на фиг.10 показана схема, представляющая значения мощности символов Р1 и Р2;
на фиг.11 показана блок-схема, представляющая типичную структуру блока обработки преамбулы для детектирования величины сдвига несущей с помощью второго способа оценки;
на фиг.12 показана схема, поясняющая обработку, выполняемую блоком модуляции BPSK;
на фиг.13 показана блок-схема, представляющая типичную установку, в которой реализуются блок генерирования PRBS, блок модуляции BPSK, блок умножения и блок детектирования фазы;
на фиг.14 показана блок-схема, представляющая другую типичную установку, в которой реализуются блок генерирования PRBS, блок модуляции BPSK, блок умножения и блок детектирования фазы;
на фиг.15 показана блок-схема последовательности операций, поясняющая процесс детектирования величины сдвига несущей детектирования величины сдвига несущей с помощью второго способа оценки;
на фиг.16А, 16В, 16С, 16D и 16Е схематично показаны виды, поясняющие третий способ оценки для оценки величины сдвига несущей;
на фиг.17 показана блок-схема, представляющая типичную структуру блока обработки преамбулы для детектирования величины сдвига несущей с помощью третьего способа оценки;
на фиг.18 показана блок-схема последовательности операций, поясняющая процесс детектирования величины сдвига несущей для детектирования величины сдвига несущей с помощью третьего способа оценки;
на фиг.19 показана блок-схема, представляющая типичную структуру устройства обработки сигнала в соответствии с другим вариантом выполнения настоящего изобретения;
на фиг.20 показана блок-схема, представляющая типичную структуру первого варианта выполнения приемной системы, в которой применяется настоящее изобретение;
на фиг.21 показана блок-схема, представляющая типичную структуру второго варианта выполнения приемной системы, в которой применяется настоящее изобретение;
на фиг.22 показана блок-схема, представляющая типичную структуру третьего варианта выполнения приемной системы, в которой применяется настоящее изобретение; и
на фиг.23 показана блок-схема, представляющая типичную структуру компьютера, в которой применяется настоящее изобретение.
Подробное описание изобретения
Типичная структура устройства обработки сигнала
На фиг.3 показана блок-схема, представляющая типичную структуру устройства обработки сигнала в качестве одного варианта выполнения настоящего изобретения.
На фиг.3 устройство обработки сигнала выполняет функцию устройства демодуляции, которое демодулирует сигнал OFDM в соответствии с DVB-T2.
Более конкретно, устройство обработки сигнала по фиг.3 включает в себя блок 11 ортогональной демодуляции, блок 12 расчета FFT, блок 13 коррекции смещения, буфер 14, блок 15 коррекции смещения, блок 16 обработки преамбулы, блок 17 синхронизации символа, блок 18 оценки типа символа и блок 19 обработки преамбулы.
В блок 11 ортогональной демодуляции подают сигнал OFDM (то есть, его сигнал IF (промежуточной частоты)) из устройства передачи, которое передает данный сигнал OFDM.
Блок 11 ортогональной демодуляции выполняет цифровую ортогональную демодуляцию подаваемого сигнала OFDM, используя несущую с заданной частотой (несущая частота; в идеальном случае, несущая должна быть той же, которая используется устройством передачи), и сигнал, ортогональный этой несущей. Полученный в результате сигнал OFDM основной полосе частот затем выводят с помощью блока 11 ортогональной демодуляции.
Следует отметить, что сигнал OFDM, выводимый блоком 11 ортогональной демодуляции, представляет собой сигнал во временной области, по сути дела, перед расчетом FFT (то есть, немедленно после расчета IFFT для символов совокупности IQ (то есть, данных, передаваемых на одной поднесущей)). Такой сигнал ниже, в соответствующих случаях, будет называться сигналом OFDM во временной области.
Сигнал OFDM во временной области представляет собой комплексный сигнал, выраженный в виде комплексных чисел, включающих в себя компоненту действительной оси (I (синфазная) компонента) и компоненту мнимой оси (Q (квадратурная) компонента).
Сигнал OFDM во временной области подают из блока 11 ортогональной демодуляции в блок 12 расчета FFT и в блок 16 обработки преамбулы.
В соответствии с информацией запуска FFT, подаваемой из блока 17 синхронизации символа, блок 12 расчета FFT извлекает сигнал OFDM во временной области с размером FFT (данные выборки сигнала) из сигнала OFDM во временной области, поступающего из блока 11 ортогональной демодуляции, и выполняет расчет FFT, то есть, быстрое вычисление DFT (дискретное преобразование Фурье).
А именно, информация запуска FFT, подаваемая из блока 17 синхронизации символа в блок 12 расчета FFT, представляет место начала того сегмента сигнала OFDM во временной области, который подвергают вычислению FFT, а также размер данного фрагмента сигнала (размер FFT).
В соответствии с информацией запуска FFT, подаваемой таким образом из блока 17 синхронизации символа, блок 12 расчета FFT извлекает, начиная с начального положения, обозначенного информацией запуска FFT, фрагмент сигнала OFDM во временной области, соответствующий размеру FFT, указанному той же информацией запуска FFT, в качестве фрагмента сигнала OFDM во временной области, подлежащего расчету FFT (ниже называется фрагментом FFT в соответствующих случаях).
Как описано выше, символы с эффективной длиной символа, не включающей защитные интервалы (то есть, собственно символы), в идеале, выделяют из символов, составляющих одиночный символ OFDM, включенный в сигнал OFDM во временной области сигнал OFDM в области времени сегмента FFT.
Блок 12 расчета FFT переходит к выполнению расчета FFT для фрагмента FFT сигнала OFDM во временной области (символы с эффективной длиной символа).
Расчет FFT, выполняемый блоком 12 расчета FFT для сигнала OFDM во временной области, обеспечивает информацию, передаваемую поднесущими, то есть, сигнал OFDM, представляющий символы в совокупности IQ.
Сигнал OFDM, получаемый в результате расчета FFT для сигнала OFDM во временной области, представляет собой сигнал в частотной области и, таким образом, далее, в соответствующих случаях, может называться сигналом OFDM в частотной области.
Блок 12 расчета FFT подает в блок 13 коррекции смещения сигнал OFDM в частотной области, полученный в результате расчета FFT.
В блок 13 коррекции смещения также подают величину сдвига несущей Р1, поступающей из блока 16 обработки преамбулы, в дополнение к сигналу OFDM в частотной области из блока 12 расчета FFT.
Величина сдвига несущей Р1 представляет собой величину сдвига несущей, оценка которой была получена с помощью символа Р1. При этом величина сдвига несущей Р1 включает в себя "грубую" величину сдвига несущей и "тонкую" величину сдвига несущей в отношении размера FFT (1К) для символа Р1.
В соответствии с величиной сдвига несущей Р1, поступающей из блока 16 обработки преамбулы, блок 13 коррекции смещения выполняет коррекцию сигнала OFDM в частотной области, поступающего из блока 12 расчета FFT таким образом, чтобы привести величину сдвига несущей Р1 в ноль. В блок 13 коррекции смещения затем подают скорректированный сигнал OFDM в частотной области в буфер 14 и в блок 19 обработки преамбулы.
Буфер 14 временно размещает сигнал OFDM в частотной области, поступающий из блока 13 коррекции смещения, перед подачей этого сигнала в блок 15 коррекции смещения.
В блок 15 коррекции смещения также подают величину сдвига несущей Р2, поступающей из блока 19 обработки преамбулы, в дополнение к сигналу OFDM в частотной области, полученному из буфера 14.
Величина сдвига несущей Р2 представляет собой величину сдвига несущей, оценка которой была получена с использованием символа Р2. Величина сдвига несущей Р2 составляет "тонкую" величину сдвига несущей для размера FFT Р2 (1K, 2K, 4K, 8K, 16K или 32K). Такая величина сдвига несущей представляет собой смещение, которое может быть захвачено (относительно) в диапазоне ±0,5 × промежуток D между поднесущими, причем несущая представляет собой несущую, используемую блоком 11 ортогональной демодуляции.
В соответствии с величиной сдвига несущей Р2, поступающей из блока 19 обработки преамбулы, блок 15 коррекции смещения корректирует сигнал OFDM в частотной области, поступающий из буфера 14, так чтобы привести величину сдвига несущей Р2 к нулю. Блок 15 коррекции смещения переходит к подаче скорректированного сигнала OFDM в частотной области, например, в блоки, которые не показаны, для выполнения необходимых процессов, включающих в себя выравнивание и коррекцию ошибок.
Блок 16 обработки преамбулы детектирует символ Р1, который представляет собой типичный сигнал первой преамбулы, из сигнала OFDM во временной области, подаваемого из блока 11 ортогональной демодуляции. Используя детектированный символ Р1, блок 16 обработки преамбулы выполняет оценку "грубой" и "тонкой" величины сдвига несущей.
"Грубая" и "тонкая" величины сдвига несущей, получаемые в результате оценки, выполняемой блоком 16 обработки преамбулы с помощью символа Р1 в отношении размера FFT (1K) для Р1 составляют величину сдвига несущей символа Р1. Блок 16 обработки преамбулы затем передает величину сдвига несущей Р1, содержащую "грубую" и "тонкую" величины сдвига несущей, в блок 13 коррекции смещения.
Блок 16 обработки преамбулы извлекает S1 и S2 из символа Р1 и подает выделенные S1 и S2 в блок 19 обработки преамбулы.
Кроме того, блок 16 обработки преамбулы передает в блок 17 синхронизации символа информацию о местоположении символа Р1, которая включена в сигнал OFDM во временной области, из блока 11 ортогональной демодуляции и которая представляет собой местоположение символа Р1 в рассматриваемом сигнале OFDM во временной области, при этом размер FFT распознают по S1 и S2, включенным в символ Р1, и информацию, необходимую для оценки местоположения границы символа OFDM.
Блок 17 синхронизации символа создает информацию запуска FFT из информации о местоположении Р1 и размера FFT, поступающих из блока 16 обработки преамбулы, и передает созданную информацию в блок 12 расчета FFT.
Кроме того, блок 17 синхронизации символа выполняет оценку местоположения границы символа OFDM из информации, предоставленной блоком 16 обработки преамбулы, и передает в блок 18 оценки типа символа сигнал, указывающий местоположение границы, в качестве сигнала синхронизации символа.
На основе сигнала синхронизации символа из блока 17 синхронизации символа блок 18 оценки типа символа выполняет оценку типа символа для символа OFDM сигнала OFDM в частотной области, передаваемого из блока 13 коррекции смещения, в блок 19 обработки преамбулы, и подает оценку типа символа в блок 19 обработки преамбулы.
Тип символа указывает, представляет ли собой символ OFDM сигнала OFDM в частотной области символ P1, P2, символ OFDM данных или символ FCS (символ конца кадра).
Блок 19 обработки преамбулы выполняет обработку детектирования величины сдвига несущей для оценки (то есть, детектирования) "грубой" величины сдвига несущей в отношении размера FFT для символа P2, то есть для типичного сигнала второй преамбулы, содержащего поднесущую, промежутки которой уже, чем у поднесущих, содержащихся в сигнале первой преамбулы, причем символы первый и второй преамбулы включены в сигнал OFDM в частотной области, подаваемый из блока 13 коррекции смещения.
А именно, блок 19 обработки преамбулы вначале детектирует символ Р2, включенный в сигнал OFDM в частотной области, поступающий из блока 13 коррекции смещения, на основе типа символа, переданного блоком 18 оценки типа символа.
Затем, на основе S1 и S2, переданных блоком 16 обработки преамбулы, блок 19 обработки преамбулы распознает размер FFT для символа Р2, включенного в сигнал OFDM в частотной области, подаваемый из блока 13 коррекции смещения. Используя размер FFT, распознанный таким образом, блок 19 обработки преамбулы выполняет оценку "грубой" величины сдвига несущей в отношении данного размера FFT.
Блок 19 обработки преамбулы переходит к подаче в блок 15 коррекции смещения "грубой" величины сдвига несущей, относящейся к размеру FFT для символа Р2, в качестве величины сдвига несущей Р2.
Блок 16 обработки преамбулы выполняет оценку "грубой" величины сдвига несущей, относящейся к размеру FFT для символа Р2, используя корреляцию одного Р2, то есть, корреляцию поднесущих, включенных в символ Р2 одного символа OFDM, так, как будет описано ниже.
Блок 19 обработки преамбулы, таким образом, может быстро выполнять оценку величины сдвига несущей со степенью точности, требуемой для демодуляции символа Р2, даже когда только один символ Р2 включен в кадр Т2.
В случае, когда множество символов Р2 (то есть, множество символов OFDM) включены в кадр Т2, блок 19 обработки преамбулы может выполнять оценку величины сдвига несущей, используя либо один из множества символов Р2, или два или более символов Р2 из множества символов Р2.
В качестве иллюстрации представлены три способа оценки, первый, второй и третий, с помощью которых блок 19 обработки преамбулы выполняет оценку "грубой" величины сдвига несущей в отношении размера FFT для Р2, используя корреляцию поднесущих, включенных в одиночный символ Р2.
Общим для первого-третьего способов является то, что в них используется корреляция поднесущих через интервалы, равные заданному количеству поднесущих, включенных в Р2.
При расчете корреляции поднесущих каждый из первого-третьего способов оценки отличается от других следующим: в первом способе оценки используют величину мощности, соответствующую мощности каждой поднесущей (символа); во втором способе оценки используют фазу каждой поднесущей; и в третьем способе оценки используют разность фаз для каждой поднесущей.
Первый способ оценки величины сдвига несущей
Ниже представлено описание первого способа оценки для оценки величины сдвига несущей с помощью корреляции поднесущей, рассчитанной путем использования величины мощности, соответствующей мощности каждой поднесущей.
На фиг.4 показаны величины мощности сигнала OFDM в частотной области.
На фиг.4 по горизонтальной оси отмечены индексы (то есть, частоты), характеризующие поднесущие сигнала OFDM в частотной области, и эта ось соответствует частоте. Кроме того, по вертикальной оси обозначены значения мощности.
В символе Р2, как описано выше со ссылкой на фиг.1, пилотные сигналы (пилотный сигналы Р2) расположены на поднесущих так, что они располагаются периодически.
А именно, в соответствии с DVB-T2, для Р2, в котором размер FFT составляет 32К и который представляет формат SISO (режим SISO), пилотные сигналы должны быть размещены на поднесущих №k, из которых индекс №k должен удовлетворять выражению mod(k, 6)=0; для других Р2, пилотные сигналы должны быть размещены на поднесущих №k, для которых индекс №k должен удовлетворять выражению mod(k, 3)=0.
Следует отметить, что mod(A, В) представляет остаток деления А на В. Индексы №k упорядочены следующим образом: индекс №0 прикреплен к поднесущей, имеющей самую низкую частоту, а индексы №k, представляющие возрастающие целые числа, соответственно прикреплены к поднесущим с возрастающими частотами.
В Р2 пилотные сигналы расположены на всех удлиненных несущих. В Р2 в режиме MISO пилотные сигналы размещены на двух поднесущих с обоих концов нормальной несущей.
Из рассмотренного выше можно видеть, что пилотные сигналы расположены по меньшей мере на поднесущих №0, №6, …, №6n и т.д. ("n" представляет собой целое число больше 0) в символе Р2, размер FFT которого составляет 32K и который представляет режим SISO (в дальнейшем описании также может говориться, что поднесущие №0, №6,…, №6n и т.д. являются пилотными сигналами). В других Р2 пилотные сигналы расположены, по меньшей мере, на поднесущих №0, №3, …, №3n и т.д.
В DVB-T2 также предусмотрено, что амплитуда поднесущих пилотных сигналов в Р2, размер FFT которых составляет 32K и которые находятся в режиме SISO, должна составлять √37/5 и что амплитуда поднесущих пилотных сигналов в других Р2 должна составлять √31/5.
DVB-T2, кроме того, предусматривает, что средняя мощность поднесущих для данных в сигнале OFDM в частотной области должна быть равна 1,0.
На фиг.4 представлены типичные значения мощности Р2 (сигнала OFDM в частотной области), для которого размер FFT составляет 32K и который находится в режиме SISO.
Как указано, символ Р2, размер FFT которого составляет 32K и который находится в режиме SISO, имеет 27265 эффективных поднесущих в диапазоне от поднесущей №0 до поднесущей №27264.
В Р2, в котором размер FFT составляет 32K и который находится в режиме SISO, как описано выше, поднесущие №0, №6, …, №6n и т.д. составляют пилотные сигналы, и пилотный сигнал расположен на каждой шестой поднесущей. Кроме того, мощность пилотного сигнала составляет 1,48=(√37/5)2, что равно амплитуде (√37/5) в квадрате.
В то же время, средняя мощность поднесущих данных в Р2 составляет 1,0, как отмечено выше.
Как описано выше, существует разность в мощности (называемая разностью добавочного значения) между поднесущей пилотного сигнала и поднесущей данных в Р2.
В соответствии с первым способом оценки, разность в мощности между поднесущей пилотного сигнала и поднесущей данных используют для расчета корреляции поднесущих.
В Р2, в котором размер FFT составляет 32K и который находится в режиме SISO, пилотные сигналы размещены на поднесущих №k, индекс №k которых удовлетворяет выражению mod(k, 6)=0, как отмечено выше. Это означает, что пилотные сигналы расположены периодически, а именно с интервалом в шесть поднесущих. Период поднесущих, с которым размещен пилотный сигнал (каждые 6 поднесущих в данном примере), может называться ниже, где это уместно, периодом пилотного сигнала.
В символах Р2, кроме тех, размер FFT которых составляет 32K и которые находятся в режиме SISO, пилотные сигналы расположены на поднесущих №k, у которых индекс №k удовлетворяет выражению mod(k, 3)=0. В этом случае, период пилотного сигнала составляет 3.
На фиг.5А и 5В схематично представлен символ Р2 с нулевой величиной сдвига несущей и Р2 с величиной сдвига несущей, равной -1.
На фиг.5А и 5В горизонтальная ось и вертикальная ось представляют собой то же, что и на фиг.4.
Знак (положительный или отрицательный) величины сдвига несущей обозначает направление, в котором поднесущие сдвинуты в их местах расположения (частотах). Таким образом, если величина сдвига несущей положительна, это означает, что соответствующие поднесущие сдвинуты в направлении более высокой частоты; если величина сдвига несущей отрицательна, поднесущие сдвинуты в направлении более низких частот.
Значение величины сдвига несущей (в абсолютном выражении) выражена в виде значения величины сдвига поднесущих относительно промежутка D между поднесущими, который принимают за 1.
Из этого следует, что величина сдвига несущей -1 обозначает сдвиг поднесущих на промежуток D между поднесущими в направлении низких частот.
На фиг.5А представлен символ Р2, величина сдвига несущей которого равна 0, в то время как на фиг.5В показан Р2, величина сдвига несущей которого составляет -1.
Каждый символ Р2 на фиг.5А и 5В представляет собой символ Р2, размер FFT которого составляет 32K и который находится в режиме SISO.
В символе Р2, размер FFT которого составляет 32K и который находится в режиме SISO, пилотные сигналы расположены с интервалом шесть поднесущих, как указано выше. Величина сдвига несущей не влияет на расположение пилотных сигналов с интервалом в шесть поднесущих.
На фиг.6А и 6В схематично представлен символ Р2, включенный в сигнал OFDM в частотной области (то есть, фактический Р2), подаваемый в блок 19 обработки преамбулы (фиг.3), и фактический Р2, имеющий поднесущие, подлежащий расчету корреляции поднесущих.
В частности, на фиг.6А показан типичный фактический Р2.
Фактический Р2 на фиг.6А представляет собой то же, что и Р2, показанный на фиг.5В, размер FFT которого равен 32K и который находится в режиме SISO, и величина сдвига несущей которого составляет -1.
В фактическом Р2 на фиг.6А добавление его величины сдвига несущей -1 к индексу №k, удовлетворяющему выражению mod(k, 6)=0, дает индекс №k' (=k-1), указывающий места расположения (частоты), на которых показаны поднесущие №-1, №5, …, №6n-1, …, №27263.
На фиг.6В представлены поднесущие, подвергаемые расчету корреляции поднесущих, выполняемому для фактического Р2, где величина сдвига несущей предполагается равной величине смещения (смещению).
Если величина смещения представляет собой, например, -2, тогда поднесущие, подвергаемые расчету корреляции поднесущих, представляют собой поднесущие №-2, №4, …, №6n-2, …, №27262, которые можно найти в местах расположения, обозначенных индексом №k' (=k-2), получаемым путем добавления величины смещения (=-2) к величине индекса №k, удовлетворяющей выражению mod(k, 6)=0 для Р2.
Если величина смещения (смещение), например, равна -1, тогда поднесущие, подвергаемые расчету корреляции поднесущих, представляют собой поднесущие №-1, №5 … №6n-1, …, №27263, которые можно найти в местах положения, обозначенных индексом №k' (=k-1), получаемым путем добавления величины смещения (=-1) к индексу №k, удовлетворяющему выражению mod(k, 6)=0 для Р2.
Аналогично, поднесущие, подвергаемые расчету корреляции поднесущих, представляют собой поднесущие №0+ смещение, №6+ смещение…, №6n+ смещение и т.д., которые можно найти в местах расположения, обозначенных индексом №k' (=k+смещение), полученных путем добавлении величины смещения (смещение) к индексу №k, удовлетворяющему выражению mod(k, 6)=0 для Р2.
Таким образом, с целью упрощения и иллюстрации, в случае, когда величина сдвига несущей для Р2 составляет ноль и когда задана заданная величина смещения (смещение), поднесущие, подвергаемые расчету корреляции поднесущих, представляют собой те поднесущие, которые расположены с интервалами, равными периоду пилотного сигнала (заданному числу; 6 в данном примере), начиная с места расположения, определенного сдвигом от первой поднесущей в Р2 на величину смещения (то есть, точка "0+смещение")
В соответствии с первым способом оценки, величина мощности, соответствующая мощности поднесущей, например, сама мощность, используется для расчета корреляции поднесущей.
Таким образом, когда применяется первый способ оценки, точку, в которую попадает в результате сдвига от первой поднесущей Р2 на величину смещения, считают исходной точкой (0+смещение), а сумму значений мощности поднесущих, расположенных с интервалами, равными периоду пилотного сигнала (заданное количество поднесущих), начиная от исходной точки, рассчитывают как корреляцию поднесущих.
Корреляцию поднесущей получают, используя каждую из изменяющихся величин смещения (смещений) в пределах заданного диапазона.
В дальнейшем описании наименьшие и наибольшие значения диапазона, в котором изменяется величина смещения (смещение), называются соответственно минимальным значением (MIN) и максимальным значением (МАХ) величины смещения (смещение). Как получить минимальное (MIN) и максимальное (МАХ) значения величины смещения (смещение) будет описано ниже.
На фиг.6В минимальное (MIN) и максимальное (МАХ) значения величины смещения (смещения), предполагают равными -2 и +2 соответственно. В отношении каждой из величин смещения -2, -1, 0, …, +2 вычисляется сумма значений мощности поднесущих с интервалами в шесть поднесущих (составляющих период пилотного сигнала) в качестве корреляции поднесущей.
В случае, когда величина смещения (смещение) совпадает с величиной сдвига несущей -1 для фактического Р2 на фиг.6А, точку, достигаемую в результате смещения от первой поднесущей Р2 на величину смещения (то есть, 0+смещение), считают исходной точкой. От этой точки (0+смещение) каждая шестая поднесущая, составляющая период пилотного сигнала, представляет собой пилотные сигналы. Сумма значений мощности этих поднесущих, таким образом, составляет сумму значений мощности пилотных сигналов (соответствуют поднесущим).
С другой стороны, в случае, когда величина смещения (смещение) не совпадает с величиной сдвига несущей -1 для фактического Р2, на фиг.6А, точку, достигаемую в результате сдвига от первой поднесущей Р2 на величину смещения (то есть, 0+смещение), также считают исходной точкой. От этой точки (0+смещение) каждая шестая поднесущая, что составляет период пилотного сигнала, представляет собой данные (а не пилотные сигналы). Сумма значений мощности этих поднесущих, таким образом, составляет сумму значений мощности поднесущих данных.
Как описано выше, амплитуда поднесущих для пилотных сигналов в Р2, размер FFT которой составляет 32К и которая находится в режиме SISO, составляет √37/5, а амплитуда поднесущих пилотных сигналов в других Р2 составляет √31/5. Кроме того, средняя мощность поднесущих для данных в сигнале OFDM в частотной области составляет 1,0.
Таким образом, начиная с исходной точки "0+смещение", достигаемой в результате сдвига от первой поднесущей символа Р2 на величину смещения (смещение), сумма значений мощности поднесущих, идущих с интервалом в шесть поднесущих, составляющих период пилотного сигнала, полученная как корреляция поднесущих, стремится быть большой, если поднесущие, подвергаемые расчету корреляции поднесущих, представляют собой пилотные сигналы. Сумма значений мощности поднесущих стремится быть малой, если эти поднесущие, подвергаемые расчетам корреляции поднесущей, представляют собой поднесущие данных.
В соответствии с первым способом оценки, в отношении каждой из множества величин смещения (смещения) в диапазоне от минимального значения (MIN) до максимального значения (МАХ), сумму значений мощности поднесущих, расположенных с интервалом, равным периоду пилотного сигнала, рассчитывают фактически как корреляцию поднесущих, начиная с местоположения, определенного путем сдвига первой поднесущей символа Р2 на величину смещения (смещения). После этого детектируют наибольшие из сумм значений мощности, полученных в отношении каждой из множества величин смещения (смещения). Величину смещения (смещение), соответствующую наибольшей сумме значений мощности, затем детектируют как величину сдвига несущей (величина сдвига несущей Р2).
Блок 19 обработки преамбулы, детектирующий величину сдвига несущей, используя первый способ оценки
На фиг.7 показана блок-схема, представляющая типичную структуру блока 19 обработки преамбулы (фиг.3), который детектирует величину сдвига несущей, используя первый способ оценки.
На фиг.7 блок 19 обработки преамбулы включает в себя блок 31 управления, блок 32 детектирования мощности, блок 33 расчета суммы и блок 34 детектирования максимального значения.
В блок 31 управления подают тип символа из блока 18 оценки типа символа (фиг.3) и сигналы S1, и S2 из блока 16 обработки преамбулы.
На основе типа символа, поступающего из блока 18 оценки типа символа, блок 31 управления распознает момент времени подачи, в который блок 13 коррекции смещения (фиг.3) подает в блок 19 обработки преамбулы символа Р2, включенный в сигнал OFDM в частотной области.
Блок 31 управления затем управляет блоком 32 детектирования мощности, блоком 33 расчета суммы и блоком 34 детектирования максимального значения, составляющими блок 19 обработки преамбулы, таким образом, чтобы обработать символ Р2, то есть сигнал OFDM в частотной области, подаваемый в распознанный момент времени подачи.
Кроме того, блок 31 управления распознает размер FFT и режим передачи (SISO или MISO) символа Р2 на основе сигналов S1 и S2, поступающих из блока 16 обработки преамбулы (фиг.3).
Когда размер FFT и режим передачи Р2 распознаны, блок 31 управления распознает период пилотных сигналов для пилотных сигналов в символе Р2, и подает распознанный период пилотных сигналов в блок 33 расчета суммы.
Кроме того, блок 31 управления получает минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещение) и передает их в блок 33 расчета суммы.
В соответствии с DVB-T2, как описано выше, символ Р2, размер FFT которого составляет 32K и который находится в режиме SISO, имеет период пилотных сигналов, равный 6; другие P2 имеют период пилотных сигналов, равный 3.
Предположим, что период пилотных сигналов обозначен Тр. В этом случае блок 31 управления получает минимальное значение (MIN) в соответствии с выражением MIN=-INT [(Тр-1)/2] и получает максимальное значение (МАХ) в соответствии с выражением MAX=+INT [(Тр-1)/2], где INT А представляет собой наибольшее целое число, не превышающее А.
В блок 32 детектирования мощности подают сигнал OFDM в частотной области из блока 13 коррекции смещения (фиг.3). Блок 32 детектирования мощности детектирует, например, собственно мощность каждой поднесущей в одном символе OFDM P2 в качестве значения мощности, соответствующего мощности данной поднесущей, включенной в символ P2 в качестве части сигнала OFDM в частотной области, поступающего из блока 13 коррекции смещения. Величину мощности, детектируемую таким образом, подают в блок 33 расчета суммы.
Блок 32 детектирования мощности может детектировать не мощность каждой поднесущей, а амплитуду данной поднесущей в качестве величины мощности. В этом случае затем выполняют последующую обработку с использованием амплитуды поднесущей.
Используя мощность поднесущих одного сигнала OFDM P2 (то есть, одного символа P2), поступающего из блока 32 детектирования мощности, блок 33 расчета суммы рассчитывает в качестве корреляции поднесущих сумму значений мощности поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, подаваемого из блока 31 управления, для каждой из множества величин смещения (смещений) в пределах от минимального значения (MIN) до максимального значения (МАХ), подаваемых из блока 31 управления, начиная с местоположения, определенного по величине сдвига от первой поднесущей P2 на действующую величину смещения (смещение). Рассчитанную таким образом корреляцию поднесущих передают в блок 34 детектирования максимального значения.
Блок 34 детектирования максимального значения детектирует наибольшую из сумм значений мощности, поступивших из блока 33 расчета суммы, которые были получены для каждой из множества величин смещения (смещений). Блок 34 детектирования максимального значения затем детектирует величину смещения (смещение), соответствующую наибольшей сумме значений мощности, как величину сдвига несущей P2, и передает детектированную величину сдвига несущей P2 в блок 15 коррекции смещения (фиг.3).
На фиг.8 показана блок-схема последовательности операций, поясняющая процесс детектирования величины сдвига несущей, выполняемый блоком 19 обработки преамбулы, показанным на фиг.7.
На основе типа символа, подаваемого из блока 18 оценки типа символа (фиг.3), блок 31 управления распознает момент времени подачи, в который блок 13 коррекции смещения (фиг.3) подает символ Р2, включенный в сигнал OFDM в частотной области, в блок 19 обработки преамбулы.
Когда наступает момент времени подачи, то есть когда сигнал OFDM в частотной области, подаваемый из блока 13 коррекции смещения (фиг.3) в блок 32 детектирования мощности, становится символом Р2, блок 31 управления на этапе S11 распознает размер FFT и режим передачи (SISO или MISO) символа Р2 на основе сигналов S1 и S2, поступающих из блока 16 обработки преамбулы (фиг.3). Кроме того, блок 31 управления распознает период Тр пилотных сигналов в символе Р2 на основе распознанного размера FFT для Р2 и режима передачи Р2, и передает пилотный период Тр, распознанный, таким образом, в блок 33 расчета суммы.
Кроме того, блок 31 управления получает минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещение), используя пилотный период Тр и выражения MIN=-INT[(Тр-1)/2] и MAX=+INT[(Тр-1)/2], и подает максимальное значение МАХ и минимальное значение MIN, полученные таким образом, в блок 33 расчета суммы. С этапа S11 управление переходит на этап S12.
На этапе S12 блок 32 детектирования мощности детектирует мощность каждой поднесущей символа Р2, подаваемого из блока 13 коррекции смещения (фиг.3), и подает детектированное значение мощности в блок 33 расчета суммы. Управление затем передают на этап S13.
На этапе S13, блок 33 расчета суммы устанавливает величину смещения (смещение) на минимальное значение (MIN), поступающее из блока 31 управления. С этапа S13 управление передают на этап S14.
На этапе S14, для рассматриваемой величины смещения (смещения) блок 33 расчета суммы рассчитывает сумму значений мощности поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, поступающих из блока 31 управления, начиная с местоположения, определенного путем сдвига от первой поднесущей Р2 на величину смещения (смещение), при этом величину мощности каждой поднесущей в Р2 подают из блока 32 детектирования мощности.
Блок 33 расчета суммы переходит к передаче в блок 34 детектирования максимального значения суммы значений мощности, рассчитанных в отношении применяемой величины смещения (смещения). С этапа S14 управление передают на этап S15.
На этапе S15, блок 33 расчета суммы проверяет для определения, равна ли величина смещения (смещение) максимальному значению (МАХ).
Если на этапе S15 величина смещения (смещение) не определена как равная максимальному значению (МАХ), то есть, если величина смещения (смещение) меньше максимального значения (МАХ), управление передают на этап S16. На этапе S16 блок 33 расчета суммы выполняет последовательное приращение величины смещения (смещения) на 1. С этапа S16 управление возвращают на этап S14 и повторяют последующие этапы.
Если на этапе S15 величину смещения (смещение) определяют равной максимальному значению (МАХ), то есть, если были рассчитаны суммы значений мощности для величин смещения (смещение) в пределах от минимального значения (MIN) до максимального значения (МАХ), то управление передают на этап S17. На этапе S17 блок 34 детектирования максимального значения детектирует в качестве корреляции поднесущих наибольшую из сумм значений мощности для каждой из величин смещения (смещение) в пределах от минимального значения (MIN) до максимального значения (МАХ).
Кроме того, блок 34 детектирования максимального значения детектирует величину смещения (смещение), соответствующую наибольшей из сумм значений мощности (максимальная величина корреляции поднесущей), как величину сдвига несущей Р2. Величину сдвига несущей Р2, детектированную таким образом, передают в блок 15 коррекции смещения (фиг.3).
После этого блок 31 управления ожидает следующего символа Р2, который включен в сигнал OFDM в частотной области, который должен быть передан из блока 13 коррекции смещения (фиг.3) в блок 19 обработки преамбулы. Когда подают следующий Р2, управление возвращается с этапа S17 на этап S11, и последующие этапы повторяют.
Описанный выше способ оценки включает в себя детектирование наибольшего значения из сумм значений мощности для каждой из величин смещения (смещение) в пределах от минимального значения (MIN) до максимального значения (МАХ), в качестве корреляции поднесущих в символе Р2. Это позволяет быстро выполнить оценку величины сдвига несущей с требуемой точностью, то есть, получить "грубую" величину сдвига несущей относительно размера FFT Р2.
С целью упрощения и иллюстрации на фиг.8 представлена величина смещения (смещение), последовательно изменяющаяся от минимального значения (MIN) до максимального значения (МАХ), когда рассчитывают сумму значений мощности поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала. На практике, однако, сумму значений мощности поднесущих на интервалах периода Тр пилотного сигнала можно рассчитывать параллельно для каждого значения смещения (смещения) в пределах от минимального значения (MIN) до максимального значения (МАХ).
Также на фиг.8 предполагается, что только один Р2 включен в фрейм Т2, и что сумму значений мощности поднесущих на интервалах периода Тр пилотного сигнала рассчитывают по одному Р2 в качестве корреляции поднесущих для рассматриваемой величины смещения (смещения). В качестве альтернативы, если фрейм Т2 содержит множество Р2, тогда может быть рассчитана сумма значений мощности по каждому из множества Р2. Затем можно получить сумму с нарастающим итогом или квазиинтеграл сумм значений мощности по множеству Р2, и результат может применяться в качестве корреляции поднесущих.
В частности, с целью упрощения и иллюстрации, предположим, что фрейм Т2 содержит два символа Р2, называемых первым Р2 и вторым Р2. В этом случае, сумма с нарастающим итогом или квазиинтеграл сумм значений мощности из первого Р2 и второго Р2 может быть рассчитана для заданной величины смещения (смещения), и результат может быть затем применяться в качестве корреляции поднесущих для рассматриваемой величины смещения.
Предположим теперь, что х(m) обозначает m-е данные, подвергаемые квазиинтегрированию, и что y(m) представляет значение интегрирования, полученное в результате выполнения квазиинтегрирования данных в пределах от х(1) до х(m). В этом случае, величину у(m) интегрирования получают, используя выражение y(m)=βx(m)+(1-β)y(m-1).
В предыдущих абзацах корреляция поднесущих была представлена как вычисляемая с использованием всех поднесущих, включенных в Р2, с интервалом, равным периоду Тр пилотного сигнала. В качестве альтернативы, некоторые из поднесущих, включенные в Р2 с интервалом, равным периоду Тр пилотного сигнала, могут быть прорежены перед тем, как поднесущие будут переданы для расчета корреляции поднесущей.
В то же время, в соответствии с первым способом оценки, минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещение) получены, соответственно, с использованием выражений MIN=-INT[(Тр-1)/2] и MAX=+INT[(Tp-1)/2].
Используя первый способ оценки, невозможно детектировать какую-либо величину сдвига несущей за пределами диапазона от минимума (MIN) до максимума (МАХ).
В соответствии с DVB-T2, период Тр пилотного сигнала составляет либо 6, или 3, как упомянуто выше. Отсюда следует, что минимальное значение (MIN) и максимальное значение (МАХ) представляют собой либо -2 и +2, или -1 и+1.
В качестве иллюстрации, рассмотрим пример, в котором период Тр пилотного сигнала равен 6, а минимальное значение (MIN) и максимальное значение (МАХ) равны соответственно -2 и +2. В этом случае, если величина сдвига несущей Р2, допустим, равна -3 за пределами диапазона от минимума (MIN) до максимума (МАХ), тогда невозможно различить две возможности, используя первый способ оценки: величина сдвига несущей рассматриваемого символа Р2 может составлять либо -3, или +3 (=-3+i×Тр; "i" представляет собой целое число).
В другом примере, если величина сдвига несущей Р2 представляет -4 за пределами диапазона от минимального значения (MIN) до максимального значения (МАХ), то также невозможно различить две возможности, используя первый способ оценки: величина сдвига несущей рассматриваемого Р2 может составлять либо -4, или +2 (=-4+i×Тр).
Как описано выше, в случаях, когда величина сдвига несущей Р2 находится за пределами диапазона от минимального значения (MIN) до максимального значения (МАХ), то есть, когда величина сдвига несущей меньше, чем - INT [(Тр-1)/2] или больше, чем +INT [(Тр-1)/2], становится невозможным точно детектировать величину сдвига несущей, используя первый способ оценки.
Однако, в случае, когда точность оценки "грубой" величины сдвига несущей, используя Р1, ухудшается, величина сдвига несущей вполне может стать меньше, чем -INT [(Тр-1)/2] или больше +INT [(Тр-1)/2]. В таких случаях, предпочтительно, точно детектировать величину сдвига несущей.
Второй способ для оценки величины сдвига несущей
Далее следует описание второго способа оценки, для оценки величины сдвига несущей с использованием корреляции поднесущих, рассчитанной путем использования фаз поднесущих.
На фиг.9А, 9В, 9С и 9D показаны схемы, поясняющие второй способ оценки для оценки величины сдвига несущей.
На фиг.9А показаны значения мощности Р2 (из сигнала OFDM в частотной области).
На фиг.9А горизонтальная ось и вертикальная ось являются теми же, что и на фиг.4.
Так же, как и для Р2, показанного на фиг.5А и 5В, размер FFT Р2, показанного на фиг.9А, установлен 32K, и этот символ Р2 находится в режиме SISO, так что период пилотного сигнала составляет 6. Величина сдвига несущей Р2 на фиг.9А составляет -1.
Пилотные сигналы в символе Р2 представляют собой сигналы, полученные в результате модуляции PRBS (псевдослучайных двоичных последовательностей) посредством BPSK (двоичная фазовая манипуляция).
А именно, пилотные сигналы в Р2 представляют собой сигналы, полученные с использованием модуляции BPSK результата операции "исключающее ИЛИ" между PRBS в направлении поднесущих (направление частот) и PN (псевдошумовых) последовательностей в направлении символов OFDM (направление времени).
В результате, на двумерной плоскости, определенной осью Х (горизонтальная ось, вытянутая слева направо), представляющей направление частот, и осью Y (вертикальная ось, вытянутая снизу вверх), обозначающей направление времени, фаза символа пилотного сигнала с частотой "х" в момент времени "у" в Р2, то есть, фаза пилотного сигнала (его поднесущей) в месте расположения (х, у) равна либо 0 или π (радиан) в зависимости от результата операции "исключающее ИЛИ" между х-м битом слева PRBS в направлении частот и у-м битом сверху PN последовательностей в направлении времени.
Описанный выше пилотный сигнал в Р2 умножают на PRBS. Таким образом, когда выполняют поворот на 0 или на π по фазе, в зависимости от PRBS, пилотный сигнал становится символом с его фазой, равной 0 или π в совокупности IQ.
Таким образом каждая поднесущая в Р2 отображается на местоположение на окружности, например единичного круга, с центром в начале координат совокупности IQ, при этом местоположение определяют путем поворота фазы поднесущей Р2, умноженной на сигнал модуляции, полученный путем BPSK модуляции в отношении PRBS. Затем получают фазовый вектор, исходная точка которого совпадает с началом координат совокупности, а конечная точка которого представляет собой точку отображения, на которую отображают поднесущую. В отношении каждой из множества величин смещения (смещения) в пределах от минимального значения (MIN) до максимального значения (МАХ) рассчитывают корреляцию поднесущих в виде суммы фазовых векторов поднесущих, идущих с интервалом, равным периоду пилотного сигнала, начиная с местоположения, определенного в результате сдвига от первой поднесущей Р2 на рассматриваемую величину смещения (смещение). Сумму фазовых векторов, полученную в качестве корреляции поднесущих, затем используют для детектирования величины сдвига несущей в Р2.
На фиг.9В показана точка отображения пилотного сигнала в Р2 (его поднесущая) в совокупности IQ.
В случае одного Р2 (один символ OFDM P2) поднесущую, составляющую пилотный сигнал, умножают на сигнал модуляции, полученный в результате BPSK модуляции PRBS. Фазу умноженной поднесущей устанавливают в 0 (или в π) таким образом, что точка отображения (I, Q) в совокупности IQ представляет собой точку (1, 0) (или (-1, 0)).
Когда поднесущая в местоположении, достигнутом в результате сдвига от первой поднесущей в P2 на величину смещения (смещение), представляет собой пилотный сигнал, тогда это местоположение рассматривают как исходную точку. Поскольку все поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала от исходной точки, представляют собой пилотные сигналы, корреляция поднесущих, представленная суммой фазовых векторов этих поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, стремится быть большой.
На фиг.9С показана сумма фазовых векторов поднесущих, идущих с интервалом, равным периоду пилотного сигнала от начальной точки и далее; начальная точка представлена поднесущей в местоположении, достигнутом в результате сдвига от первой поднесущей в P2 на величину смещения (смещение).
Как описано выше, когда поднесущая в местоположении, достигнутом в результате сдвига от первой поднесущей в P2 на величину смещения (смещение), представляет собой пилотный сигнал, все поднесущие, идущие с интервалом, равным периоду пилотного сигнала, начиная от этого сдвинутого положения, представляют собой пилотные сигналы.
В результате, точка отображения каждой поднесущей через интервалы периода пилотного сигнала представляет собой (в идеале) точку (1, 0), и ее фазовый вектор представляет собой вектор (1, 0). Сумма фазовых векторов поднесущих, идущих с интервалом, равным периоду пилотного сигнала, составляет вектор с большим модулем, поскольку векторы (1, 0) суммируются с последовательным накоплением.
С другой стороны, если поднесущая в местоположении, достигнутом в результате сдвига от первой поднесущей в P2 на величину смещения (смещение), не является пилотным сигналом, а данными, тогда сумма фазовых векторов поднесущих, идущих с интервалом, равным периоду пилотного сигнала, составляет корреляцию поднесущих с малой величиной.
На фиг.9D показана точка отображения поднесущей данных P2 в совокупности IQ. Фаза поднесущей данных изменяется в зависимости от данных, и точка отображения изменяется аналогичным образом.
Если поднесущая в местоположении, достигнутом в результате сдвига от первой поднесущей в P2 на величину смещения (смещение), не является пилотным сигналом, а данными, тогда все поднесущие, идущие с интервалом пилотного сигнала, начиная с этого сдвинутого местоположения, представляют собой поднесущие данных, а не пилотных сигналов. Фазовые вектора этих поднесущих, идущих с интервалом, равным периоду пилотного сигнала, таким образом, ориентированы в разных направлениях, причем каждый вектор имеет модуль, равный 1.
В результате, в случае, когда поднесущая в местоположении, достигнутом в результате сдвига от первой поднесущей Р2 на величину смещения (смещение), представляет собой поднесущую данных, сумма фазовых векторов поднесущих, идущих с интервалом, равным периоду пилотного сигнала, составляет корреляцию поднесущих в виде вектора, имеющего малый модуль (например, 0).
Второй способ оценки, таким образом, включает в себя детектирование наибольшего из векторов суммы, полученных в результате суммирования фазовых векторов, полученных для каждой из множества величин смещения (смещения) в пределах от минимального значения (MIN) до максимального значения (МАХ). Величины смещения (смещение), соответствующие наибольшему вектору суммы, затем детектируют как величину сдвига несущей Р2.
В частности, умножение поднесущей Р2 на сигнал модуляции, полученный в результате модуляции BPSK для PRBS (то есть, фазу поднесущей Р2 поворачивают в соответствии с PRBS), называют декодированием PRBS.
В соответствии со вторым способом оценки (как и в третьем способе оценки, который будет описан ниже), поднесущие Р2 декодируют посредством PRBS, и получают сумму фазовых векторов поднесущих, декодированных посредством PRBS, которые следуют с интервалом, равным периоду пилотного сигнала. Это позволяет точно детектировать величину сдвига несущей, меньшую -INT [(Тр-1)/2], или величину сдвига несущей, большую +INT [(Тр-1)/2] (называемую ниже, где это уместно, величиной сдвига несущей, большей периода Тр пилотного сигнала).
В качестве иллюстрации рассмотрим символ Р2, показанный на фиг.9А, у которого период Тр пилотного сигнала равен 6 и в котором величина сдвига несущей равна -1. Предполагается, что величины сдвига несущей -16 и +16, превышающие период Тр пилотного сигнала, применяются в качестве минимального (MIN) и максимального (МАХ) значений для величины смещения (смещение), соответственно.
В этом случае для величины смещения (смещения) -16 поднесущие, идущие с интервалом, равным периоду Тр, начиная с местоположения, определенного в результате сдвига на величину рассматриваемого смещения (смещение), являются поднесущими данных, а не пилотными сигналами. Вектор суммы, представляющий собой сумму фазовых векторов этих поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, в этом случае представляет собой вектор с малым модулем, например, 0.
Аналогично, для величины смещения (смещения) -15 или -14, поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала, начиная с местоположения, определяемого сдвигом на рассматриваемую величину смещения (смещение), представляют собой поднесущие данных. Вектор суммы, представляющий собой сумму фазовых векторов этих поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, также представляет собой вектор с малым модулем.
Для величины смещения (смещение) -13 поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала, начиная от местоположения, определенного по величине сдвига на рассматриваемую величину смещения (смещение), представляют собой пилотные сигналы. Однако, величина смещения -13 не совпадает с величиной сдвига несущей -1. По этой причине точки отображения пилотных сигналов на совокупность IQ как поднесущие, декодированные посредством PRBS, которые следуют с интервалом периода Тр пилотного сигнала, случайно распределены по точкам (1, 0) и (-1, 0).
В результате, суммарный вектор, представляющий сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, составляет вектор с малым модулем.
Величины смещения (смещение) в пределах от минимального значения (MIN) -16 до максимального значения (МАХ)+16 включают в себя величины смещения (смещение), не совпадающие с величиной, полученной путем суммирования целочисленного кратного периода Тр пилотного сигнала с величиной смещения несущей частоты -1. Для такой несоответствующей величины смещения, как и в упомянутом выше случае, когда величина смещения (смещение) составляет -16, поднесущие, идущие с интервалом, равным периоду пилотного сигнала, начиная от местоположения, определенного по величине сдвига на рассматриваемую величину смещения (смещение), представляют собой поднесущие данные. В этом случае, вектор суммы, составляющий сумму фазовых векторов этих поднесущих, идущих с интервалом периода Тр пилотного сигнала, составляет вектор с малым модулем, например, 0.
Величины смещения (смещение) в пределах от минимального значения (MIN) -16 до максимального значения (МАХ)+16 также включают в себя величины смещения (смещение), совпадающие с величиной, полученной путем сложения целого числа кратного (за исключением 0) периоду Тр пилотного сигнала, с величиной сдвига несущей -1. Для этих совпадающих величин смещения (смещение), как и в упомянутом выше случае, когда величина смещения (смещение) составляет -13, поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала, начинающиеся от местоположения, определенного по сдвигу на рассматриваемые величины смещения (смещение), представляют собой пилотные сигналы. Поскольку величина смещения (смещение) не совпадает с величиной сдвига несущей -1, точки отображения на совокупности IQ пилотных сигналов, составленных поднесущими PRBS-декодированных поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, случайно распределены по точкам (1, 0) и (-1, 0). В этом случае, вектор суммы, составляющий сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, также составляет вектор с малым модулем.
Величины смещения (смещение) в пределах от минимального значения (MIN) -16 до максимального значения (МАХ)+16 также включают в себя величины смещения (смещение), совпадающие с величиной сдвига несущей -1. Для совпадающих величин смещения (смещение) поднесущие, идущие с интервалом периода Тр пилотного сигнала, начиная от местоположения, определенного по величине сдвига на рассматриваемые величины смещения (смещение), представляют собой пилотные сигналы. Точки отображения на совокупности IQ пилотных сигналов, составленных поднесущими PRBS-декодированных поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, в этом случае концентрируются в точке (1, 0) или (-1, 0).
В результате, вектор суммы, представляющий собой сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, составляет вектор с большим модулем, как показано на фиг.9С.
В соответствии с описанным выше вторым способом оценки (как и в третьем способе оценки, который будет описан ниже) поднесущие Р2 подвергают PRBS-декодированию. Из этих PRBS-декодированных поднесущих вектора поднесущих, которые следуют с интервалом, равным периоду Тр пилотного сигнала, суммируют для получения фазовых векторов, для получения суммарного вектора. Если величина смещения (смещение) не совпадает с величиной сдвига несущей, тогда суммарный вектор представляет собой вектор с малым модулем, даже в случае, когда поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала, представляют собой пилотные сигналы.
В результате, даже когда величина сигнала несущей частоты больше периода Тр пилотного сигнала, становится возможным точно детектировать такую величину смещения несущей частоты.
В качестве альтернативы, при использовании второго способа оценки поднесущие Р2 можно отображать без декодирования посредством PRBS. Фазовый вектор каждой поднесущей затем рассчитывают, каждый вектор, начиная с начальной точки и заканчивая конечной точкой, определяют по I - компоненте (в абсолютном выражении или в виде квадрата) рассматриваемой точки отображения или по Q - компоненте точки отображения. Фазовые вектора суммируют для получения суммарного вектора, который можно использовать для детектирования величины сдвига несущей.
В предыдущем случае величина сдвига несущей в Р2, которую можно было детектировать точно, больше -INT[(Тр-1)/2] и меньше +INT[(Тр-1)/2], как и в случае, когда использовали первый способ оценки.
Как описано выше, фазовые вектора PRBS-декодированных поднесущих, расположенных с интервалом, равным периоду Тр пилотного сигнала, суммируют для получения суммарного вектора. Этот суммарный вектор представляет собой вектор с малым модулем, если только величина смещения (смещение) не совпадает с величиной сдвига несущей частоты. Это означает, что минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещения) могут быть установлены таким образом, чтобы задать требуемый диапазон, в котором следует детектировать величину смещения несущей.
Следует отметить, что если диапазон, в котором детектируют величину сигнала несущей частоты, будет установлен слишком широким, количество величин смещения (смещений), для которых должны быть получены суммарные вектора, может стать ощутимо большим. Например, если суммарные вектора получают параллельно с использованием аппаратных средств, размеры таких аппаратных средств могут быть огромными.
По этой причине, предпочтительно установить необходимый и достаточный диапазон, в котором следует детектировать величину сигнала несущей частоты, то есть, необходимый и достаточный диапазон от соответствующего минимального значения (MIN) до соответствующего максимального значения (МАХ) величины смещения (смещений).
Здесь предполагается, что D1 означает промежуток D между поднесущими в Р1 (фиг.1), в котором используются только самые широкие промежутки между поднесущими, установленные в соответствии с DVB-T2, a D2 означает промежуток D между поднесущими в Р2. При таком допущении второй способ оценки используют для получения минимального значения (MIN) и максимального значения (МАХ) величины смещения (смещения), используя частное деления промежутка D1 между поднесущей или в Р1 на промежуток D2 между поднесущими в Р2.
На фиг.10 схематично показаны действующие величины мощности Р1 и Р2, когда полоса пропускания передачи составляет 8 МГц.
Промежуток D1 между поднесущей или в Р1 составляет 8 929 Гц, как пояснялось выше со ссылкой на фиг.2.
Р2 на фиг.10 имеет размер FFT, установленный в 32K, находится в режиме SISO и обладает промежутком D2 между поднесущими 279 Гц, как описано выше со ссылкой на фиг.2.
В блоке 19 обработки преамбулы (фиг.3), сигнал OFDM в частотной области, включающий в себя символ Р2, используемый для детектирования величины сдвига несущей в Р2, представляет собой сигнал OFDM, прошедший коррекцию, выполненную блоком 13 коррекции смещения, на величину сдвига несущей в Р1, детектированную с помощью Р1. Величина сдвига несущей попадает в пределы диапазона ±0,5 × промежуток D1 между поднесущими, то есть, в пределы диапазона ±8,929/2 Гц (между -8,929/2 Гц и +8 929 Гц).
Поэтому достаточный диапазон, в котором следует детектировать величину сдвига несущей, определяют как ±0,5 × промежуток D1 между поднесущими. Диапазон ±0,5 × промежуток D1 между поднесущими преобразуется в ±0,5×D1/2 после преобразования в величину смещения (смещение) для Р2, промежуток D между поднесущими которого равен D2.
Из приведенного выше описания можно видеть, что для Р2, промежуток D2 между поднесущими которого составляет 279 Гц, достаточно детектировать величину сдвига несущей в пределах диапазона ±0,5 Гц × 8 929 Гц/279 Гц, то есть, в пределах диапазона ±16. В этом случае, минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещение) составляет -16 и +16 соответственно.
Блок 19 обработки преамбулы, детектирующий величину сдвига несущей, используя второй способ оценки
На фиг.11 показана блок-схема, представляющая типичную структуру блока 19 обработки преамбулы (фиг.3) для детектирования величины сдвига несущей с помощью второго способа оценки.
На фиг.11 блок 19 обработки преамбулы включает в себя блок 51 управления, блок 52 генерирования PRBS, блок 53 модуляции BPSK, блок 54 умножения, блок 55 детектирования фазы, блок 56 отображения, блок 57 расчета суммы векторов и блок 58 детектирования максимального вектора.
В блок 51 управления подают тип символа из блока 18 оценки типа символа (фиг.3) и сигналы S1 и S2 из блока 16 обработки преамбулы.
Основываясь на типе символа, поступающем из блока 18 оценки типа символа, блок 51 управления распознает момент времени подачи, в который блок 13 коррекции смешения (фиг.3) подает в блок 19 обработки преамбулы символ Р2, включенный в сигнал OFDM в частотной области.
Блок 51 управления затем управляет блоками (от блока 52 генерирования PRBS до блока 58 детектирования максимального вектора), составляющими блок 19 обработки преамбулы, для обработки сигнала OFDM в частотной области, а именно Р2, подаваемого в момент времени подачи.
Блок 51 управления также распознает размер FFT и режим передачи (SISO или MISO) символа Р2 на основе символа S1 и S2, поступающих из блока 16 обработки преамбулы (фиг.3).
Кроме того, блок 51 управления распознает период Тр пилотных сигналов для пилотных сигналов в Р2, на основе размера FFT в Р2 и режима передачи Р2. Период Тр пилотных сигналов, распознанный таким образом, передают в блок 57 расчета суммы векторов.
Кроме того, блок 51 управления получает промежуток D2 между поднесущими в Р2 из размера FFT в Р2 и другие данные. Используя частное D1/D2 деления промежутка D1 между поднесущими в Р1 на промежуток D2 между поднесущими в Р2, блок 51 управления получает минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещения). Минимальное значение (MIN) и максимальное значение (МАХ), полученные таким образом, подают в блок 57 расчета суммы векторов.
Более конкретно, блок 51 управления получает минимальное значение (MIN) в соответствии с выражением MIN=-INT[(D1/D2)/2], а максимальное значение (МАХ) в соответствии с выражением MAX=+INT[(D1/D2/2].
Блок 52 генерирования PRBS генерирует те же PRBS, как и те, что использовали в устройстве передачи, которое не показано, при генерировании пилотных сигналов в Р2 при передаче сигнала OFDM. PRBS, генерируемые таким образом, подают в блок 53 модуляции BPSK.
Блок 53 модуляции BPSK выполняет модуляцию BPSK для битов в PRBS, поступающих из блока 52 генерирования PRBS, в символы в совокупности IQ, составляющей модулированный сигнал. Символы в совокупности IQ затем подают в блок 54 умножения.
В дополнение к модулированному сигналу, подаваемому из блока 53 модуляции BPSK, в блок 54 умножения подают сигнал OFDM в частотной области из блока 13 коррекции смещения (фиг.3).
Блок 54 умножения выполняет процесс декодирования PRBS, включающий в себя умножение на модулированный сигнал из блока 53 модуляции BPSK каждой из поднесущих, относящихся к одному символу OFDM P2, включенному в сигнал OFDM в частотной области, поступающий из блока 13 коррекции смещения. Поднесущие, прошедшие процесс декодирования PRBS, передают в блок 55 детектирования фазы.
Блок 55 детектирования фазы детектирует фазу каждой из PRBS-декодированных поднесущих из блока 54 умножения и передает эту детектированную фазу в блок 56 отображения.
В данном случае блок 55 детектирования фазы детектирует фазу каждой из PRBS-декодированных поднесущих, например, на основе предположения, что фаза пилотного сигнала (расположенного на рассматриваемой поднесущей), имеющая самую низкую частоту в P2, равна 0. Хотя пилотный сигнал с самой низкой частотой в P2 называется краевым пилотным сигналом в соответствии с DVB-T2, этот сигнал можно рассматривать как пилотный сигнал P2 без каких-либо проблем.
Блок 56 отображения отображает каждую поднесущую в местоположение на окружности, например, единичного круга с центром в начале координат совокупности IQ, причем это местоположение определяют путем поворота на рассматриваемую фазу поднесущей, поступающую из блока 55 детектирования фазы. Блок 56 отображения переходит к получению фазового вектора, начинающегося в исходной точке начала координат и заканчивающегося в точке отображения, на которую была отображена поднесущая (в качестве альтернативы, вектор фазы может начинаться в точке отображения и заканчиваться в исходной точке). Блок 56 отображения передает в блок 57 расчета суммы векторов фазовый вектор, полученный таким образом для каждой из поднесущих в P2.
Что касается каждой из множества величин смещения (смещений) в пределах от минимального (MIN) до максимального (МАХ) значений (=MIN, MIN+1, …, МАХ-1, МАХ), подаваемых из блока 51 управления, блок 57 расчета суммы векторов использует фазовые вектора поднесущих в одном символе OFDM в P2, переданные из блока 56 отображения, для расчета в качестве корреляции поднесущих суммарного вектора, который представляет собой сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, начиная с местоположения, определенного путем сдвига от первой поднесущей в P2 на величину смещения (смещение). Корреляцию поднесущих, рассчитанную таким образом, подают в блок 58 детектирования максимального вектора.
Блок 58 детектирования максимального вектора детектирует наибольший (по модулю) из суммарных векторов, которые поступают из блока 57 расчета суммы векторов и которые получают для каждого из множества значений смещения (смещений). Блок 58 детектирования максимального вектора затем детектирует величину смещения (смещение), соответствующую наибольшему суммарному вектору, как величину сдвига несущей Р2, и передает детектированную величину сдвига несущей Р2 в блок 15 коррекции смещения (фиг.3).
На фиг.12 схематично показан вид, поясняющий обработку, выполняемую блоком 53 модуляции BPSK, показанным на фиг.11.
В частности, на фиг.12 показана совокупность IQ.
Как упомянуто выше, блок 53 модуляции BPSK выполняет BPSK модуляцию каждого из битов в PRBS, поступающих из блока 52 генерирования PRBS.
А именно, если заданный бит в PRBS из блока 52 генерирования PRBS равен 0, блок 53 модуляции BPSK выполняет BPSK модуляцию этого бита в модулированный сигнал, соответствующий символу точки (1, 0) совокупности для IQ-совокупности. Если заданный бит в PRBS из блока 52 генерирования PRBS равен 1, тогда блок 53 модуляции BPSK выполняет BPSK-модуляцию этого бита в модулированный сигнал, соответствующий символу точки (-1, 0) совокупности в IQ-совокупности.
Модуляция BPSK для PRBS, выполняемая блоком 53 модуляции BPSK, представляет собой ту же модуляцию, что и модуляция BPSK для PRBS, используемой в качестве пилотного сигнала в Р2 (то есть, для поиска результата функции "исключающее ИЛИ" между PRBS и последовательностью PN), причем последнюю модуляцию выполняют с помощью устройства передачи, передающего сигнал OFDM.
На фиг.13 показана блок-схема, представляющая пример реализации блока 52 генерирования PRBS, блока 53 модуляции BPSK, блока 54 умножения и блока 55 детектирования фазы на фиг.11.
На фиг.13 блок 52 генерирования PRBS, блок 53 модуляции BPSK, блок 54 умножения и блок 55 детектирования фазы по фиг.11 составлены из блока 61 генерирования PRBS, блоков 62I и 62Q умножения, селекторов 63I и 63Q и блока 64 детектирования фазы.
Блок 61 генерирования PRBS генерирует ту же PRBS, что и генерируемая в блоке 52 генерирования PRBS на фиг.11. Сгенерированную таким образом PRBS подают в селекторы 63I и 63Q.
В блок 62I умножения подают I-компоненту сигнала OFDM в частотной области (то есть, поднесущую (символ) Р2, включенную в сигнал), поступающего из блока 13 коррекции смещения (фиг.3).
Блок 62I умножения затем умножает на -1 I-компоненту сигнала OFDM в частотной области, поступающего из блока 13 коррекции смещения. Произведение, полученное в результате умножения, подают в селектор 63I.
В блок 62Q умножения подают Q-компоненту сигнала OFDM в частотной области (то есть, поднесущую (символ) Р2, включенную в сигнал), поступающий из блока 13 коррекции смещения (фиг.3).
Блок 62Q умножения затем умножает на -1 Q-компоненту сигнала OFDM в частотной области, поступающего из блока 13 коррекции смещения. Произведение, получаемое в результате умножения, передают в селектор 63Q.
В дополнение к произведению из блока 62I умножения в селектор 63I подают I-компоненту сигнала OFDM в частотной области из блока 13 коррекции смещения (фиг.3).
В соответствии с битом PRBS из блока 61 генерирования PRBS селектор 63I выбирает либо I-компоненту сигнала OFDM в частотной области из блока 13 коррекции смещения, либо произведение из блока 62I умножения. Результат, выбранный селектором 63I, передают в блок 64 детектирования фазы в качестве I-компоненты поднесущей, прошедшей процесс декодирования PRBS.
Если бит PRBS из блока 61 генерирования PRBS равен 0, селектор 63I выбирает I-компоненту сигнала OFDM в частотной области из блока 13 коррекции смещения. Если бит PRBS из блока 61 генерирования PRBS равен 1, селектор 63I выбирает произведение из блока 62I умножения.
В дополнение к произведению из блока 62Q умножения в селектор 63Q подают Q-компоненту сигнала OPDM в частотной области из блока 13 коррекции смещения (фиг.3).
В соответствии с битом PRBS из блока 61 генерирования PRBS селектор 63Q выбирает либо Q-компоненту сигнала OFDM в частотной области из блока 13 коррекции смещения, либо произведение из блока 62Q умножения. Результат выбора селектора 63Q затем передают в блок 64 детектирования фазы в качестве Q-компоненты поднесущей, прошедшей процесс декодирования PRBS.
Если бит PRBS из блока 61 генерирования PRBS равен 0, селектор 63Q выбирает Q-компоненту сигнала OFDM в частотной области из блока 13 коррекции смещения. Если бит PRBS из блока 61 генерирования PRBS равен 1, селектор 63Q выбирает произведение из блока 62Q умножения.
Блок 64 детектирования фазы получает фазу поднесущей, которая состоит из I-компоненты из селектора 63I и Q-компоненты из селектора 63Q и которая прошла процесс декодирования PRBS. Полученную таким образом фазу поднесущей подают в блок 56 отображения (фиг.11).
На фиг.14 показана блок-схема, представляющая альтернативный вариант реализации блока 52 генерирования PRBS, блока 53 модуляции BPSK, блока 54 умножения и блока 55 детектирования фазы, указанных на фиг.11.
На фиг.14 блок 52 генерирования PRBS, блок 53 модуляции BPSK, блок 54 умножения и блок 55 детектирования фазы по фиг.11 составлены блоком 71 генерирования PRBS, блоком 72 детектирования фазы, блоком 73 суммирования, блоком 74 WRAP и селектором 75.
Блок 71 генерирования PRBS генерирует ту же PRBS, которую генерирует блок 52 генерирования PRBS на фиг.11. Сгенерированную таким образом PRBS подают в селектор 75.
В блок 72 детектирования фазы подают сигнал OFDM в частотной области из блока 13 коррекции смещения (фиг.3).
Блок 72 детектирования фазы затем детектирует фазу θ поднесущей в Р2 в пределах диапазона от -π до +π, причем эта поднесущая включена в сигнал OFDM в частотной области из блока 13 коррекции смещения. Детектированную таким образом фазу поднесущей передают в блок 73 суммирования и в селектор 75.
Блок 73 суммирования добавляет π к фазе θ, подаваемой из блока 72 детектирования фазы. Фазу θ+π, получаемую в результате суммирования, подают в блок 74 WRAP.
Блок 74 WRAP суммирует целое число, кратное 2π, с фазой θ+π из блока 73 суммирования, преобразуя, таким образом, фазу θ+π в фазу, определенную в пределах диапазона от -π до +π. Полученную в результате фазу подают в селектор 75.
В соответствии с битом PRBS из блока 71 генерирования PRBS селектор 75 выбирает либо фазу из блока 72 детектирования фазы, либо фазу из блока 74 WRAP. Результат выбора селектора 75 передают в блок 56 отображения (фиг.11) в качестве фазы поднесущей, которая была подвергнута процессу декодирования PRBS.
Если бит PRBS из блока 71 генерирования PRBS равен 0, селектор 75 выбирает фазу, подаваемую из блока 72 детектирования фазы. Если бит PRBS из блока 71 генерирования PRBS равен 1, селектор 75 выбирает фазу из блока 74 WRAP.
На фиг.15 показана блок-схема последовательности операций, поясняющая процесс детектирования величины сдвига несущей, выполняемый блоком 19 обработки преамбулы, показанным на фиг.11.
Основываясь на типе символа, подаваемом из блока 18 оценки типа символа (фиг.3), блок 51 управления распознает момент времени подачи, в который блок 13 коррекции смещения (фиг.3) подает в блок 19 обработки преамбулу Р2, включенную в сигнал OFDM в частотной области.
Когда достигнут момент времени подачи, то есть когда сигнал OFDM в частотной области, подаваемый из блока 13 коррекции смещения (фиг.3) в блок 54 умножения, становится равным Р2, блок 51 управления на этапе S31 распознает размер FFT и режим передачи (SISO или MISO) символа Р2 на основе сигналов S1 и S2, поступающих из блока 16 обработки преамбулы (фиг.3). Кроме того, блок 51 управления распознает период Тр пилотного сигнала для пилотных сигналов в Р2 на основе распознанного размера FFT в Р2 и режима передачи Р2, и передает период Тр пилотных сигналов, распознанный таким образом, в блок 57 расчета суммы векторов.
Блок 51 управления затем получает промежутки D2 между поднесущими из размера FFT в Р2. Кроме того, используя частное D1/D2, (то есть, результат деления промежутка D1 между поднесущими в Р1 на промежуток D2 между поднесущими в Р2), блок 51 управления получает минимальное значение (MIN) величины смещения (смещение) в соответствии с выражением MIN=-INT[(D1/D2/2] и максимальную величину (МАХ) в соответствии с выражением MAX=+INT[(D1/D2/2].
Кроме того, блок 51 управления подает минимальное (MIN) и максимальное (МАХ) значения величины смещения (смещение) в блок 57 расчета суммы векторов. С этапа S31 управление передают на этап S32.
На этапе S32 блок 52 генерирования PRBS, блок 53 модуляции BPSK, блок 54 умножения и блок 55 детектирования фазы получают фазу поднесущей после процесса декодирования PRBS для каждой из поднесущих в Р2 подаваемом из блока 13 коррекции смещения (фиг.3). Фазы поднесущей, полученные таким образом, передают в блок 56 отображения.
С этапа S32 управление передают на этап S33. На этапе S33 блок 56 отображения отображает каждую поднесущую на местоположение на окружности единичного круга с центром в начале координат совокупности IQ, причем местоположение определяют путем поворота на фазу поднесущей, прошедшей процесс декодирования PRBS, причем фазу передают из блока 55 детектирования фазы. Блок 56 отображения переходит к получению фазового вектора, начинающегося в точке начала координат и заканчивающегося в точке отображения, на которую отображена рассматриваемая поднесущая.
Блок 56 отображения, кроме того, передает в блок 57 расчета суммарного вектора фазовый вектор, полученный для каждой из поднесущих в Р2. С этапа S33 управление передают на этап S34.
На этапе S34 блок 57 расчета суммарного вектора устанавливает величину смещения (смещение) на минимальное значение (MIN), подаваемое из блока 51 управления. Управление затем переходит на этап S35.
На этапе S35, используя фазовые векторы поднесущих Р2 из блока 56 отображения, блок 57 расчета суммарного вектора рассчитывает суммарный вектор, суммируя фазовые векторы поднесущих (после процесса декодирования PRBS), идущих с интервалом, равным периоду Тр пилотных сигналов, передаваемому из блока 51 управления, причем каждая из поднесущих начинается в местоположении, определенном по сдвигу на величину смещения (смещение) от первой поднесущей Р2.
Блок 57 расчета суммы векторов затем передает в блок 58 детектирования максимального вектора суммарный вектор, представляющий собой сумму фазовых векторов, рассчитанных для рассматриваемой величины смещения (смещения). С этапа S35 управление передают на этап S36.
На этапе S36 блок 57 суммарного вектора проверяет, равна ли величина смещения (смещение) максимальному значению (МАХ).
Если на этапе S36 определяют, что величина смещения (смещение) не равна максимальному значению (МАХ), то есть, если величина смещения (смещение) меньше, чем максимальное значение, управление передают на этап S37. На этапе S37 блок 57 расчета суммарного вектора последовательно увеличивает величину смещения на 1. С этапа S37 управление возвращается на этап S35 и повторяют последующие этапы.
Если на этапе S36 величина смещения (смещение) будет определена равной максимальному значению (МАХ), то есть, если суммарный вектор был рассчитан для каждой из величин смещения (смещение) в пределах от минимального значения (MIN) до максимального значения (МАХ), управление передают на этап S38. На этапе S38 блок 58 детектирования максимального вектора детектирует наибольший из суммарных векторов, подаваемых из блока 57 расчета суммарного вектора, причем суммарные вектора были рассчитаны последним в качестве корреляции поднесущих для каждой из величин смещения (смещение) в пределах от минимального (MIN) до максимального (МАХ) значения.
Кроме того, блок 58 детектирования максимального вектора детектирует величину смещения (смещение), соответствующую наибольшему суммарному вектору (то есть, максимальной корреляции поднесущих) в качестве величины сдвига несущей Р2. Величину сдвига несущей Р2, детектированную таким образом, передают в блок 15 коррекции смещения (фиг.3).
После этого блок 51 управления ожидает следующего Р2, включенного в сигнал OFDM в частотной области, передаваемого из блока 13 коррекции смещения (фиг.3) в блок 19 обработки преамбулы. С этапа S38 управление возвращают на этап S31 и последующие этапы повторяют.
Как описано выше, суммарный вектор рассчитывают как сумму фазовых векторов, каждый из которых представляет корреляцию поднесущих в Р2 для каждой из величин смещения (смещения) в пределах от минимального значения (MIN) до максимального значения (МАХ). Наибольшие из этих суммарных векторов затем детектируют в качестве оценки величины сдвига несущей с требуемой точностью. Таким образом, быстро выполняют оценку "грубой" величины смещения несущей со степенью точности, необходимой для размера FFT в Р2.
Кроме того, становится возможным точно детектировать величины сдвига несущей, которые могут быть меньше, чем -INT[(Тр-1)/2], или больше, чем +INT[(Тр-1)/2].
С целью упрощения и для иллюстрации на фиг.15 показана величина смещения (смещение), которая последовательно изменяется от минимального значения (MIN) до максимального значения (МАХ), когда рассчитывают сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, полученных после процесса декодирования PRBS. На практике, однако, сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов можно рассчитать параллельно для каждой из величин смещения (смещение) в пределах от минимального значения (MIN) до максимального значения (МАХ).
Кроме того, на фиг.15 предполагается, что только один Р2 включен в фрейм Т2 и что сумму фазовых векторов поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, рассчитывают по одному Р2 в качестве корреляции поднесущих для рассматриваемой величины смещения (смещения). В качестве альтернативы, если фрейм Т2 содержит множество Р2, тогда может быть рассчитана сумма фазовых векторов по каждому из множества Р2. Сумма с нарастающим итогом или квазиинтеграл этих сумм фазовых векторов по множеству Р2 может быть затем получена, и результат может быть применен в качестве корреляции поднесущих.
В предыдущих абзацах была представлена корреляция поднесущих, которую рассчитывают, используя все поднесущие, включенные в Р2, идущие с интервалом, равным периоду Тр пилотных сигналов. В качестве альтернативы, некоторые из поднесущих, включенных в Р2 с интервалом, равным периоду Тр пилотного сигнала, могут быть разрежены перед тем, как поднесущие будут переданы для расчета корреляции поднесущей.
Как описано выше, пилотные сигналы Р2 представляют собой сигналы, получаемые в результате модуляции BPSK с помощью операции "исключающее ИЛИ" между PRBS в направлении частот и PN последовательностями в направлении времени. Таким образом, если бы требовалось получить абсолютную фазу каждого пилотного сигнала в Р2, пилотный сигнал должен был бы вначале быть умножен на PRBS (а именно путем поворота фазы пилотного сигнала на 0 или на π в зависимости от бита PRBS) и также на PN последовательность. Произведение такого умножения затем используют для поиска абсолютной фазы пилотного сигнала.
Однако, в соответствии со вторым способом оценки (а также в соответствии с третьим способом оценки), абсолютные фазы пилотных сигналов в Р2 не требуются. Вместо этого необходимо получить только относительные фазы, например, относительно пилотного сигнала с самой низкой частотой в Р2, который принимается равным 0. Это позволяет получить оценку величины сдвига несущей со степенью точности, необходимой для размера FFT в Р2, без выполнения умножения PN последовательностей.
Третий способ для оценки величины сдвига несущей
На фиг.16А, 16В, 16С, 16D и 16Е схематично показаны виды, поясняющие третий способ оценки для оценки величины сдвига несущей на основе корреляции поднесущих, рассчитанной с использованием разностей фаз поднесущих.
В соответствии со вторым способом оценки, как описано выше, можно детектировать значительные величины сдвига несущей, которые могут быть меньше, чем -INT[(Тр-1)/2] или больше, чем +INT[(Тр-1)/2], быстро и со степенью точности, необходимой для размера FFT в Р2.
В то же время, дрожание фазы, возникающее в местах расположения, где блок 12 расчета FFT начинает расчет FFT для Р2 (дрожание фазы запуска окна FFT) или частотный сдвиг, возникающий, когда сигнал OFDM во временной области, подлежащий расчету FFT, подвергают дискретизации (остаточное смещение моментов времени), могут создавать коэффициент, вызывающий поворот фаз поднесущих (символа) в одном сигнале OFDM (называемый ниже коэффициентом поворота фазы).
На фиг.16А показаны типичные фазы пилотных сигналов (составленных по поднесущим) в одном символе OFDM P2, который следует после обработки декодирования PRBS, когда существует коэффициент поворота фазы.
Если присутствует коэффициент поворота фазы, фазы PRBS-декодированных пилотных сигналов увеличиваются с постоянным градиентом пропорционально частотам, как представлено на фиг.16А.
В примере по фиг.16А фазы PRBS-декодированных пилотных сигналов наклонены таким образом, что они подняты на Δθ для поднесущих периода Тр пилотного сигнала (шесть поднесущих на фиг.16А).
На фиг.16В показаны типичные фазовые векторы пилотных сигналов в Р2 в совокупности IQ, где имеет место коэффициент поворота фазы.
Предположим теперь, что один из пилотных сигналов в Р2 выделен (то есть, рассматривается как пилотный сигнал, представляющий интерес) и что фаза этого пилотного сигнала, представляющего интерес, равна 0.
В этом случае, пилотный сигнал, отстоящий от пилотного сигнала, представляющего интерес, на поднесущие интервала Тр пилотного сигнала, например, в направлении более высоких частот (такой пилотный сигнал называется следующим пилотным сигналом), имеет фазу, увеличенную на градиент Δθ по сравнению с фазой пилотного сигнала, представляющего интерес (Δθ=0+Δθ).
Кроме того, пилотный сигнал, отстоящий от следующего пилотного сигнала на поднесущие интервала Тр пилотного сигнала в направлении более высоких частот (этот пилотный сигнал называется пилотным сигналом, следующим после следующего сигнала), имеет фазу, увеличенную на градиент Δθ по сравнению с фазой Δθ следующего пилотного сигнала (2Δθ=Δθ+Δθ).
Таким образом, в случае, когда имеет место коэффициент поворота фазы, фазы пилотных сигналов поворачиваются кратно градиенту Δθ.
На фиг.16С показано, как фазы пилотных сигналов типично поворачиваются на величину, кратную градиенту Δθ, как описано выше.
Например, если фазы всех PRBS-декодированных пилотных сигналов в одном символе OFDM Р2 составляют один поворот, тогда полученный в результате суммарный вектор может оказаться вектором с малым модулем (то есть, 0). Это затрудняет детектирование величины сдвига несущей.
В соответствии с третьим способом оценки, детектируют разность фаз между каждой из поднесущих, содержащихся в Р2, с одной стороны, и поднесущей, отстоящей от рассматриваемой поднесущей на период Тр пилотного сигнала, с другой стороны. Поднесущую, представляющую интерес, затем отображают на местоположение на окружности, например, единичного круга, с центром в точке начала координат совокупности IQ, причем местоположение определяют путем поворота разности фаз для рассматриваемой поднесущей. После этого получают вектор разности фаз, который начинается (или заканчивается) в начале координат и заканчивается (или начинается) в точке отображения, на которую была отображена поднесущая, представляющая интерес.
Кроме того, в соответствии с третьим способом оценки, для каждой из множества величин смещения (смещений) в пределах от минимального значения (MIN) до максимального значения (МАХ) вектор разности фаз получают между каждой из поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, с одной стороны, и начальным местоположением, достигаемым путем сдвига на действующую величину смещения (смещение) от первой поднесущей в Р2, с другой стороны. Векторы разности фаз, полученные таким образом, суммируют в качестве корреляции поднесущих.
Третий способ оценки, кроме того, включает в себя детектирование наибольшего из суммарных векторов, каждый из которых представляет собой сумму векторов разности фаз, полученных для каждой из множества величин смещения (смещений). Величину смещения (смещение), соответствующую наибольшему суммарному вектору, детектируют как величину смещения несущей в Р2.
На фиг.16D показан типичный вектор разности фаз.
В случае, когда фазу PRBS-декодированного пилотного сигнала поворачивают на градиент Δθ из-за наличия коэффициента поворота фазы, вектор разности фаз рассматриваемого пилотного сигнала имеет модуль, равный 1 и градиент (угол отклонения) Δθ, как показано на фиг.16D.
Как описано выше, суммарный вектор, представляющий собой сумму векторов разности фаз пилотных сигналов (составленных соответствующими поднесущими), представляет собой вектор с большим модулем.
На фиг.16Е представлен типичный суммарный вектор, составляющий сумму векторов разности фаз таких пилотных сигналов (состоящих из поднесущих).
Векторы разности фаз всех пилотных сигналов, прошедших процесс декодирования PRBS, оказываются векторами, каждый из которых ориентирован так, что он имеет градиент Δθ. Суммарный вектор, представляющий сумму этих векторов разности фаз поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, таким образом, имеет большой модуль, как показано на фиг.16Е, причем каждый вектор разности фаз получают между каждой поднесущей, то есть пилотным сигналом, и начальным местоположением, определенным путем сдвига на каждую величину смещения (смещения) от первой поднесущей в Р2.
С другой стороны, если поднесущая в начальном местоположении, достигнутом путем сдвига величины смещения (смещения) от первой поднесущей в Р2, не является пилотным сигналом, а поднесущей данных, тогда все поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала, начиная от сдвинутого местоположения, представляют собой поднесущие данных. В этом случае векторы разности фаз этих поднесущих, идущих с интервалом, равным периоду Тр пилотного сигнала, ориентированы в разных направлениях, и каждый вектор имеет модуль, равный 1.
В результате, когда поднесущая в местоположении, достигнутом в результате сдвига на величину смещения (смещение) от первой поднесущей Р2, представляет собой поднесущую данных, поднесущие, идущие с интервалом, равным периоду Тр пилотного сигнала, начиная от местоположения сдвига, обеспечивают векторы разности фаз, которые, при их суммировании, составляют суммарный вектор малым модулем, например, 0.
Таким образом, после того как суммарные векторы получены из векторов разности фаз, каждый из которых получен для каждой из множества величин смещения (смещений) в пределах от минимального значения (MIN) до максимального значения (МАХ), наибольший из суммарных векторов детектируют как величину сдвига несущей в Р2.
В соответствии с третьим способом оценки, как и в случае второго способа оценки, можно точно детектировать значительные величины сдвига несущей, которые могут превышать период Тр пилотных сигналов так, как описано выше.
Блок 19 обработки преамбулы, детектирующий величину сдвига несущей с помощью третьего способа оценки
На фиг.17 показана блок-схема, представляющая типичную структуру блока 19 обработки преамбулы (фиг.3) для детектирования величины сдвига несущей с помощью третьего способа оценки.
На фиг.17 блоки, которые соответствуют блокам, показанным на фиг.11, обозначены такими же номерами ссылочных позиций, и их описания здесь будут опущены в случае, когда оно избыточно.
Блок 19 обработки преамбулы по фиг.17 подобен его аналогу, показанному на фиг.11, тем, что он содержит блок 51 управления, блок 52 генерирования PRBS, блок 53 модуляции BPSK, блок 54 умножения и блок 55 детектирования фазы.
С другой стороны, блок 19 обработки преамбулы на фиг.17 отличается от своего аналога, показанного на фиг.11, тем, что он имеет блок 81 детектирования разности фаз, блок 82 отображения, блок 83 расчета суммы векторов и блок 84 детектирования максимального вектора, вместо блока 56 отображения, блока 57 расчета суммы векторов и блока 58 детектирования максимального вектора.
Блок 51 управления на фиг.17 так же, как и его аналог на фиг.11, управляет блоками (от блока 52 генерирования PRBS до блока 55 детектирования фазы, и от блока 81 детектирования разности фаз до блока 84 детектирования максимального вектора), составляя блок 19 обработки преамбулы.
Кроме того, блок 51 управления распознает период Тр пилотных сигналов для пилотных сигналов в Р2, как и его аналог, показанный на фиг.11. Блок 51 управления, кроме того, получает минимальное (MIN) и максимальное (МАХ) значения величины смещения (смещение) путем использования частного D1/D2, полученного путем деления промежутка D1 между поднесущими в Р1 на промежуток D2 между поднесущими в Р2.
Блок 51 управления подает период Тр пилотных сигналов в блок 81 детектирования разности фаз и в блок 83 расчета суммы векторов. Блок 51 управления также передает минимальное значение (MIN) и максимальное значение (МАХ) величины смещения (смещения) в блок 83 расчета суммы векторов.
Блоки от блока 52 генерирования PRBS до блока 55 умножения выполняют процесс декодирования PRBS, в котором умножают на модулированный сигнал из блока 53 модуляции BPSK каждую из поднесущих, содержащуюся в Р2, в сигнале OFDM в частотной области из блока 13 коррекции смещения (фиг.3). Блоки 52-55 также детектируют фазы PRBS-декодированных поднесущих и подают в блок 81 детектирования разности фаз эти детектированные фазы.
Блок 81 детектирования разности фаз детектирует (то есть, рассчитывает) разность фаз между каждой из поднесущих, содержащихся в Р2, с одной стороны, и поднесущей, отделенной от рассматриваемой поднесущей периодом Тр пилотных сигналов, передаваемым из блока 51 управления, с другой стороны, путем использования фаз поднесущей, подаваемых из блока 55 детектирования фазы. Разность фаз, детектируемую таким образом, передают в блок 82 отображения.
Блок 82 отображения отображает каждую поднесущую в местоположение на окружности, например, единичного круга, с центром в начале координат IQ совокупности, при этом это местоположение определяют путем поворота на разность фаз поднесущих, передаваемую из блока 81 детектирования разности фаз. Затем получают вектор разности фаз, который начинается в начале координат и заканчивается на точке отображения, на которую была отображена рассматриваемая поднесущая. Блок 82 отображения переходит к подаче в блок 83 расчета суммы векторов вектора разности фаз, получаемого для каждой из поднесущих в Р2.
Используя векторы разности фаз поднесущих в одном символе OFDM P2, подаваемые из блока 82 отображения для каждой из множества величин смещения (смещений) в диапазоне от минимального (MIN) до максимального (МАХ) значений (=MIN, MIN+1, …, МАХ-1, МАХ), поступающих из блока 51 управления, блок 83 расчета суммы векторов рассчитывает, в качестве корреляции поднесущих, суммарный вектор, представляющий собой сумму векторов разности фаз для поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, подаваемых из блока 51 управления, начиная с местоположения, определенного путем сдвига на величину смещения (смещение) от первой поднесущей в Р2. Суммарные векторы, полученные таким образом, передают в блок 84 детектирования максимального вектора.
Блок 84 детектирования максимального вектора детектирует наибольший (по модулю) из суммарных векторов, подаваемых блоком 83 расчета суммы векторов для каждого из множества значений смещения (смещений). Блок 84 детектирования максимального вектора затем детектирует величину смещения (смещение), соответствующую наибольшему суммарному вектору, как величину сдвига несущей в Р2, и передает детектированную величину сдвига несущей в Р2 в блок 15 коррекции смещения (фиг.3).
На фиг.18 показана блок-схема последовательности операций, поясняющая процесс детектирования величины сдвига несущей, выполняемый блоком 19 обработки преамбулы по фиг.17.
На основе типа символа, подаваемого из блока 18 оценки типа символа, (фиг.3), блок 51 управления распознает момент времени подачи, в который блок 13 коррекции смешения (фиг.3) передает в блок 19 обработки преамбулы символ Р2, включенный в сигнал OFDM в частотной области.
Когда наступает момент времени подачи, то есть когда сигнал OFDM в частотной области, подаваемый блоком 13 коррекции смещения (фиг.3) в блок 54 умножения, становится символом Р2, блок 51 управления на этапе S51 распознает размер FFT и режим передачи (SISO или MISO) символа Р2 на основе сигналов S1 и S2 из блока 16 обработки преамбулы (фиг.3). Блок 51 управления также распознает период Тр пилотных сигналов для пилотных сигналов в Р2 на основе размера FFT для Р2 и режима передачи Р2 и подает распознанный период Тр пилотных сигналов в блок 83 расчета суммы векторов.
Блок 51 управления также получает промежуток D2 между поднесущими в Р2, например, на основе размера FFT в Р2. Кроме того, используя частное D1/D2 от деления промежутка D1 между поднесущими в Р1 на промежуток D2 между поднесущими в Р2, блок 51 управления получает минимальное значение (MIN) в соответствии с выражением MIN=-INT[(D1/D2/2)] и максимальное значение (МАХ) в соответствии с выражением MAX=+INT[(D1/D2/2)].
Блок 51 управления затем передает минимальное (MIN) и максимальное (МАХ) значения величины смещения (смещение) в блок 83 расчета суммы векторов. С этапа S51 управление передают на этап S52.
На этапе S52 блок 52 генерирования PRBS, блок 53 модуляции BPSK, блок 54 умножения и блок 55 детектирования фазы получают фазу каждой из поднесущих, содержащихся в символе Р2, подаваемом из блока 13 коррекции смещения (фиг.3), после чего следует процесс декодирования PRBS. Фазы поднесущих, полученные таким образом, передают в блок 81 детектирования разности фаз.
С этапа S52 управление передают на этап S53. На этапе S53, используя фазы поднесущей, передаваемые из блока 55 детектирования фазы, блок 81 детектирования разности фаз детектирует разность фаз между каждой из поднесущих, содержащихся в Р2, с одной стороны, и поднесущей, отделенной от рассматриваемой поднесущей периодом Тр пилотных сигналов, подаваемым из блока 51 управления.
Кроме того, блок 81 детектирования разности фаз передает в блок 82 отображения разность фаз, детектируемую для каждой из поднесущих, содержащихся в Р2 (то есть, разность фаз поднесущих). С этапа S53 управление передают на этап S54.
На этапе S54 блок 82 отображения отображает каждую поднесущую на местоположение на окружности единичного круга с центром в начале координат IQ совокупности, причем местоположение определяют путем поворота на разность фаз PRBS-декодированной поднесущей, переданной из блока 81 детектирования разности фаз. Блок 82 отображения переходит к получению вектора разности фаз, начинающийся в точке начала координат и заканчивающийся в точке отображения, на которую была отображена рассматриваемая поднесущая.
Блок 82 отображения затем передает в блок 83 расчета суммы векторов вектора разности фаз, полученные для каждой из поднесущих в Р2. С этапа S54 управление передают на этап S55.
На этапе S55, блок 83 расчета суммы векторов устанавливает величину смещения (смещение) на минимальное значение (MIN), переданное из управления 51. Начиная с этапа S55, управление передают на этап S56.
На этапе S56, используя векторы разности фаз поднесущих в Р2 из блока 82 отображения, блок 83 расчета суммы векторов рассчитывает суммарный вектор, представляющий собой сумму векторов разности фаз поднесущих (после процесса декодирования PRBS), идущих с интервалом, равным периоду Тр пилотных сигналов, передаваемому из блока 51 управления, для каждой из поднесущих, начиная с местоположения, достигаемого в результате сдвига на величину смещения (смещение) от первой поднесущей Р2.
Блок 83 расчета суммы векторов затем передает в блок 84 детектирования максимального вектора суммарный вектор, представляющий собой сумму векторов разности фаз, рассчитанную для действующей величины смещения (смещение). С этапа S56 управление передают на этап S57.
На этапе S57 блок 83 расчета суммы векторов проверяет, равна ли величина смещения (смещение) максимальному значению (МАХ).
Если на этапе S57 определяют, что величина смещения (смещение) не равна максимальному значению (МАХ), то есть, если величина смещения (смещение) меньше максимального значения, управление передают на этап S58. На этапе S58 блок 83 расчета суммы векторов увеличивает величину смещения (смещение) на 1. С этапа S58 управление возвращается на этап S56, и последующие этапы повторяют.
Если на этапе S57 величину смещения (смещение) определяют равной максимальному значению (МАХ), то есть, если вектор суммы был рассчитан для каждой из величин смещения (смещений) в диапазоне от минимального значения (MIN) до максимального значения (МАХ), управление передают на этап S59. На этапе S59, блок 84 детектирования максимального вектора детектирует наибольший из суммарных векторов, подаваемых из блока 83 расчета суммы векторов, причем суммарные векторы рассчитаны указанным блоком как корреляция поднесущих для каждой из величин смещения (смещение) в диапазоне от минимального (MIN) до максимального (МАХ) значения.
Кроме того, блок 84 детектирования максимального вектора детектирует величину смещения (смещение), соответствующее наибольшему суммарному вектору (то есть, максимальной корреляции поднесущих), в качестве величины сдвига несущей в Р2. Величину сдвига несущей в Р2, детектируемую таким образом, передают в блок 15 коррекции смещения (фиг.3).
После этого блок 51 управления ожидает следующего символа Р2, включенного в сигнал OFDM в частотной области, подлежащий передаче из 13 блока коррекции смещения (фиг.3) в блок 19 обработки преамбулы. С этапа S59 управление возвращается на этап S51, и последующие этапы повторяют.
Как описано выше, суммарный вектор рассчитывают как сумму векторов разности фаз, каждый из которых представляет корреляцию поднесущих в Р2 для каждой из величин смещения (смещений) в диапазоне от минимального значения (MIN) до максимального значения (МАХ). Наибольшие из суммарных векторов затем детектируют для оценки величины сдвига несущей с требуемой точностью. Таким образом, быстро выполняют оценку "грубой" величины сдвига несущей со степенью точности, необходимой для размера FFT для Р2.
Кроме того, можно точно детектировать величины сдвига несущей, которые могут быть меньше, чем -INT[(Тр-1)/2], или больше, чем +INT[(Тр-1)/2].
С целью упрощения и иллюстрации на фиг.18 показаны величины смещения (смещение), последовательно изменяемые от минимального значения (MIN) до максимального значения (МАХ), когда рассчитывают сумму векторов разности фаз поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, после процесса декодирования PRBS. На практике, однако, сумма векторов разности фаз поднесущих, следующих с интервалом, равным периоду Тр пилотных сигналов, может быть рассчитана параллельно для каждой из величин смещения (смещений) в диапазоне от минимального значения (MIN) до максимального значения (МАХ).
Кроме того, на фиг.18 предполагается, что только один символ Р2 включен в фрейм Т2 и что сумму векторов разности фаз поднесущих, идущих с интервалом, равным периоду Тр пилотных сигналов, рассчитывают по одной Р2, в качестве корреляции поднесущих для рассматриваемой величины смещения (смещение). В качестве альтернативы, если фрейм Т2 содержит множество символов Р2, тогда можно рассчитать сумму векторов разности фаз по каждому из множества Р2. Сумма нарастающим итогом или квазиинтеграл сумм векторов разности фазы по множеству Р2 могут быть затем получены, и результат может быть использован в качестве корреляции поднесущих.
В предыдущих абзацах была показана корреляция поднесущих, рассчитываемая с использованием всех поднесущих, включенных в Р2 через интервалы, равные периоду Тр пилотных сигналов. В качестве альтернативы, некоторые из поднесущих, включенные в Р2 через интервалы периода Тр пилотного сигнала, могут быть прорежены перед тем, как поднесущие будут переданы для расчета корреляции поднесущих.
Как описано выше, блок 19 обработки преамбулы может использовать поднесущие, расположенные с интервалом, отличным от самого широкого из промежутков между поднесущими, определенный в соответствии с DVB-T2 или подобными стандартами. Блок 19 обработки преамбулы, таким образом, детектирует величину сдвига несущей, используя корреляцию поднесущих, включенных в один Р2, который содержит пилотные сигналы, следующие с интервалом, равным заданному периоду Тр пилотных сигналов. Это позволяет детектировать величину сдвига несущей быстро и с требуемой точностью.
Более конкретно, блок 19 обработки преамбулы может детектировать величину сдвига несущей со степенью точности, необходимой для размера FFT для Р2, используя, например, первый из символов OFDM Р2 (или единственный символ OFDM в фрейме Т2, если только один символ OFDM Р2 включен в него), включенный во фрейм Т2.
Поэтому, устройство обработки сигнала по фиг.3 может детектировать величину сигнала несущей со степенью точности, необходимой для размера FFT для Р2, в то время как в буфере 14 содержится первый одиночный символ OFDM для Р2, включенный в сигнал OFDM в частотной области, перед коррекцией детектированной величины смещения несущей. Это позволяет быстро установить синхронизацию.
В то же время, один фрейм Т2 имеет максимальную продолжительность 250 мс. Может случиться, что после приема фрейма Т2 в данный момент времени устройство обработки сигнала не сможет детектировать величину сдвига несущей со степенью точности, необходимой для размера FFT для Р2. В таком случае устройство обработки сигнала должно ожидать в течение длительного времени следующего фрейма Т2, который будет принят перед обработкой.
В случае устройства обработки сигнала по фиг.3, когда первый одиночный символ OFDM Р2, включенный в фрейм Т2, принятый в данный момент времени, помещают в буфер, можно детектировать величину смещения несущей со степенью точности, необходимой для размера FFT рассматриваемого Р2. Это свойство устраняет необходимость ожидания в течение длительного времени, прежде чем следующий фрейм Т2 будет принят и обработан, как в предыдущем случае.
Другая типичная структура устройства обработки сигнала
На фиг.19 показана блок-схема, представляющая типичную структуру устройства обработки сигнала в качестве другого варианта выполнения настоящего изобретения.
На фиг.19 блоки, которые соответствуют блокам, показанным на фиг.3, обозначены одинаковыми номерами ссылочных позиций, и их описания ниже будет опущено в случае его избыточности.
В устройстве обработки сигнала по фиг.3 сигнал OFDM корректируют (то есть, выполняют коррекцию смещения) с опережающим управлением. В устройстве же обработки сигнала по фиг.19 сигнал OFDM корректируют с использованием управления с обратной связью.
На фиг.19 устройство обработки сигнала включает в себя блок 11 ортогональной демодуляции, блок 12 расчета FFT, блок 16 обработки преамбулы, блок 17 синхронизации символа, блок 18 оценки типа символа, блок 19 обработки преамбулы, блок 91 коррекции смещения и блок 92 расчета величины коррекции.
Блок 11 ортогональной демодуляции выполняет цифровую ортогональную демодуляцию подаваемого сигнала OFDM. Компоненты I и Q получаемого в результате сигнала OFDM во временной области, который представляет собой сигнал OFDM в основной полосе частот, передают из блока 11 ортогональной демодуляции в блок 91 коррекции смещения.
Блок 91 коррекции смещения корректирует сигнал OFDM во временной области из блока 11 ортогональной демодуляции в соответствии с величиной коррекции, подаваемой из блока 92 расчета величины коррекции (то есть, для коррекции смещения). Сигнал OFDM во временной области, скорректированный таким образом, передают из блока 91 коррекции смещения в блок 12 расчета FFT и в блок 16 обработки преамбулы.
В соответствии с информацией запуска FFT, передаваемой из блока 17 синхронизации символа, блок 12 расчета FFT извлекает сигнал OFDM во временной области размера FFT из сигнала OFDM во временной области, поступающего из блока 11 ортогональной демодуляции, и выполняет расчет FFT для выделенного сигнала OFDM во временной области.
Блок 12 расчета FFT подает в блок 19 обработки преамбулы сигнал OFDM в частотной области, полученный в результате расчета FFT.
Помимо поступления в блок 19 обработки преамбулы, сигнал OFDM в частотной области, полученный в результате расчета FFT, передают в эти блоки, которые не показаны, которые выполняют такие необходимые процессы, как выравнивание и коррекция ошибок.
В то же время блок 16 обработки преамбулы детектирует символ Р1 из сигнала OFDM во временной области, передаваемого из блока 91 коррекции смещения. Используя Р1, детектированный таким образом, блок 16 обработки преамбулы выполняет оценку "грубой" и "тонкой" величин сдвига несущей.
Блок 16 обработки преамбулы затем передает в блок 92 расчета величины коррекции величину сдвига несущей в Р1, которая включает в себя "грубую" величину сдвига несущей и "тонкую" величину сдвига несущей, оценки которых были получены путем использования Р1 в отношении размера FFT (1К) для рассматриваемого Р1.
Кроме того, блок 16 обработки преамбулы извлекает сигналы S1 и S2 из Р1 и подает извлеченные S1 и S2 в блок 19 обработки преамбулы.
Кроме того, блок 16 обработки преамбулы подает в блок 17 синхронизации символа информацию о местоположения Р1, которая включена в сигнал OFDM во временной области, из блока 91 коррекции смещения и которая представляет местоположение Р1 в рассматриваемом сигнале OFDM во временной области, а также размер FFT, включенный в Р1.
Из информации о местоположении Р1 и размере FFT, подаваемой из блока 16 обработки преамбулы, блок 17 синхронизации символа генерирует информацию запуска FFT и подает ее в блок 12 расчета FFT.
Кроме того, блок 17 синхронизации символа выполняет оценку местоположения границы символа OFDM (то есть, местоположение границы), и передает сигнал, представляющий это местоположение границы, в блок 18 оценки типа символа в качестве сигнала синхронизации символа.
На основе сигнала синхронизации символа и т.п. из блока 17 синхронизации символа блок 18 оценки типа символа выполняет оценку типа символа для символов сигнала OFDM в частотной области, подаваемого из блока 12 расчета FFT в блок 19 обработки преамбулы. Полученную, таким образом, оценку типа символа передают в блок 19 обработки преамбулы.
Блок 19 обработки преамбулы выполняет процесс детектирования величины сдвига несущей для оценки (детектирования) "грубой" величины сдвига несущей в отношении размера FFT для Р2, включенного в сигнал OFDM в частотной области, поступающий из блока 12 расчета FFT. Процесс детектирования величины сдвига несущей выполняют, используя сигнал OFDM в частотной области из блока 12 расчета FFT, сигналы в S1 и S2 из блока 16 обработки преамбулы и тип символа из блока 18 оценки типа символа.
Блок 19 обработки преамбулы передает величину сдвига несущей в Р2, полученную в результате обработки детектирования величины сдвига несущей, в блок 92 расчета величины коррекции.
Блок 92 расчета величины коррекции рассчитывает величину коррекции сигнала OFDM, которая устанавливает в ноль величину сдвига несущей в Р1 из блока 16 обработки преамбулы и величину сдвига несущей в Р2 из блока 19 обработки преамбулы. Величину коррекции, рассчитанную таким образом, передают в блок 91 коррекции смещения.
Как описано выше, блок 91 коррекции смещения корректирует сигнал OFDM в области времени, поступающий из блока 11 ортогональной демодуляции, в соответствии с величиной коррекции, подаваемой блоком 92 расчета величины коррекции.
Описанную выше коррекцию сигнала OFDM выполняют под управлением с обратной связью с помощью устройства обработки сигнала по фиг.19, выполняя при этом оценку величины сдвига несущей столь же быстро и с такой же степенью точности, необходимой для демодуляции Р2, что и в случае коррекции сигнала OFDM, выполняемой с опережающим управлением устройством обработки сигнала по фиг.3.
С данном варианте выполнения изобретения величину сдвига несущей детектируют, используя пилотные сигналы (и краевые пилотные сигналы) в Р2. В качестве альтернативы величину сдвига несущей можно детектировать, используя сигналы SP (рассеянные пилотные сигналы), сигналы СР (последовательные пилотные сигналы), сигналы FCP (закрывающие фрейм пилотные сигналы) или тому подобное.
Также, в соответствии с данным вариантом выполнения настоящего изобретения, детектирование величины сдвига несущей направлено на сигнал OFDM, определяемый в соответствии с DVB-T2. В качестве альтернативы, детектирование величины сдвига несущей, используя описанные выше фазовые векторы или векторы разности фаз, могут быть направлены на сигнал OFDM системы с множеством несущих таким образом, что, случайные последовательности, такие как PRBS, располагаются как пилотные сигналы в направлении поднесущих (то есть, в направлении частот).
Типичная структура приемной системы
На фиг.20 показана блок-схема, представляющая типичную структуру первого варианта выполнения приемной системы, в которой применяется настоящее изобретение.
На фиг.20 система приема состоит из блока 101 получения, блока 102 обработки декодирования канала передачи и блока 103 обработки декодирования источника информации.
Блок 101 получения получает, например, данные, составляющие программы широковещательной телевизионной передачи или тому подобное в форме, OFDM-модулированных сигналов, известных как сигналы OFDM.
В частности, например, станции широковещательной передачи и веб-серверы, которые не показаны, могут передавать сигнал OFDM, получаемый блоком 101 получения.
В случае, когда сигнал OFDM передают, например, от станций широковещательной передачи, используя наземные волны, спутниковые волны или через сети CATV (кабельное телевидение), блок 101 получения может состоять из тюнера или STB (телевизионной приставки). В случае, когда сигнал OFDM передают от веб-серверов в виде групповой передачи, например, с использованием IPTV (телевидение через протокол Интернет), блок 101 получения может типично содержать сетевой интерфейс I/F (интерфейс), такой как NIC (карта сетевого интерфейса).
Блок 101 получения получает сигнал OFDM через каналы передачи, такие как наземная цифровая широковещательная передача, спутниковая цифровая широковещательная передача, сети CATV или Интернет (не показаны). Сигнал OFDM, полученный таким образом, передают в блок 102 обработки декодирования канала передачи.
Блок 102 обработки декодирования канала передачи выполняет обработку декодирования канала передачи для сигнала OFDM, полученного блоком 101 получения через канал передачи, при этом выполняют процесс декодирования канала передачи, включающий в себя, по меньшей мере, демодуляцию и процесс коррекции ошибок, для коррекции ошибок, которые могли возникнуть в канале передачи. В результате, сигнал, полученный таким образом, передают в блок 103 обработки декодирования источника информации.
Таким образом, сигнал OFDM, полученный блоком 101 получения через канал передачи, был подвергнут, по меньшей мере, кодированию для коррекции ошибки для коррекции ошибок, которые могли произойти в канале передачи. Блок 102 обработки декодирования канала передачи выполняет процесс декодирования канала передачи, такой как демодуляция и коррекция ошибок для сигнала OFDM.
Типичные схемы кодирования для коррекции ошибок включают в себя кодирование LDPC и кодирование Рида-Соломона.
Блок 103 обработки декодирования источника информации выполняет процесс декодирования источника информации на сигнале, который был подвергнут процессу декодирования канала передачи, при этом процесс декодирования источника информации включает в себя, по меньшей мере, процесс распаковки сжатой информации в исходную информацию.
А именно, сигнал OFDM, полученный блоком 101 получения через канал передачи, мог быть кодирован со сжатием для сжатия данных таким образом, что объем данных или информации, такой как изображения и звуки, уменьшился. В этом случае, блок 103 обработки декодирования источника информации выполняет процесс декодирования источника информации, такую как процесс распаковки сжатого сигнала в исходную информацию (процесс распаковки) для сигнала, который прошел процесс декодирования канала передачи.
Если сигнал OFDM, полученный блоком 101 получения через канал передачи, не будет определен как кодированный со сжатием, тогда блок 103 обработки декодирования источника информации, не выполняет процесс распаковки сжатой информации обратно в ее исходный формат.
Типичный процесс распаковки может представлять собой MPEG декодирование. Процесс декодирования канала передачи может включать в себя дескремблирование и т.п., в дополнение к процессу распаковки.
В приемной системе, имеющей описанную выше структуру, блок 101 получения получает через канал передачи сигнал OFDM, который представляет данные, составляющие изображения и звуки, и т.п., которые прошли кодирование со сжатием, такое как MPEG кодирование, и которые подвергли кодированию с коррекцией ошибок, такому как кодирование LDPC. Сигнал OFDM, полученный таким образом, передают в блок 102 обработки декодирования канала передачи.
Блок 102 обработки декодирования канала передачи выполняет процесс декодирования канала передачи на сигнале OFDM, поступающем из блока 101 получения, причем процесс декодирования канала передачи включает в себя те же процессы демодуляции и коррекции ошибок, которую выполняли с помощью устройства обработки сигнала, показанного на фиг.3 или на фиг.19, в качестве устройства демодуляции. Сигнал, полученный в результате процесса декодирования канала передачи, передают в блок 103 обработки декодирования источника информации.
Блок 103 обработки декодирования источника информации выполняет процесс декодирования источника информации, такой как MPEG декодирование на сигнале, подаваемом из блока 102 обработки декодирования канала передачи. Изображения и/или звуки, полученные в ходе обработки, затем выводят с помощью блока 103 обработки декодирования источника информации.
Приемная система по фиг.20, выполненная, как описано выше, может, например, применяться в TV тюнерах для приема цифровой телевизионной широковещательной передачи.
Блок 101 получения, блок 102 обработки декодирования канала передачи и блок 103 обработки декодирования источника информации может быть каждый выполнен в виде независимого устройства (аппаратного модуля, такой как IC (интегральная схема) или программный модуль).
Некоторые или все из блока 101 получения, блока 102 обработки декодирования канала передачи и блока 103 обработки декодирования источника информации могут комбинироваться в качестве независимого устройства. А именно, комплект из блока 101 получения и блока 102 обработки декодирования канала передачи, комплект из блока 102 обработки декодирования канала передачи и блока 103 обработки декодирования источника информации, или комплект из блока 101 получения, блока 102 обработки декодирования канала передачи и блока 103 обработки декодирования источника информации могут быть сформированы в одно независимое устройство.
На фиг.21 показана блок-схема, представляющая типичную структуру второго варианта выполнения приемной системы, в которой применяется настоящее изобретение.
Среди номеров ссылочных позиций, показанных на фиг.21, те, которые уже использовались на фиг.20, обозначают аналогичные или соответствующие элементы, и описание этих элементов может быть опущено в случае его избыточности.
Приемная система по фиг.21 совпадает с ее аналогом, показанным на фиг.20, в том, что она включает в себя блок 101 получения, блок 102 обработки декодирования канала передачи и блок 103 обработки декодирования источника информации. Различие между двумя версиями приемной системы состоит в том, что приемная система по фиг.21 дополнительно включает в себя выходной блок 111.
Выходной блок 111, например, состоит из устройства отображения, предназначенного для отображения изображения и/или громкоговорителей для вывода звуков. Кроме того, выходной блок 111 выводит изображения и звуки, представленные сигналом, выводимым из блока 103 обработки декодирования источника информации. В общем, выходной блок 111 предназначен для отображения изображений и/или вывода звуков.
Описанная выше приемная система, представленная на фиг.21, может применяться, например, в телевизионных приемниках для приема цифровых телевизионных широковещательных передач или в радиоприемниках для приема радиопередач.
Если для сигнала, полученного блоком 101 получения, определяют, что он не является кодированным со сжатием, тогда сигнал, выводимый блоком 102 обработки декодирования канала передачи, передают непосредственно в выходной блок 111, минуя блок 103 обработки декодирования источника информации.
На фиг.22 показана блок-схема, представляющая типичную структуру третьего варианта выполнения приемной системы, в которой применяется настоящее изобретение.
Среди номеров ссылочных позиций, показанных на фиг.22, те, которые уже использовались на фиг.20, обозначают одинаковые или соответствующие элементы, и описание этих элементов может быть исключено, в случае его избыточности.
Приемная система по фиг.22 совпадает с ее аналогом, показанным на фиг.20, в том, что она включает в себя блок 101 получения и блок 102 обработки декодирования канала передачи.
Различие между двумя версиями системы приема состоит в том, что в системе приема по фиг.22 отсутствует блок 103 обработки декодирования источника информации, но она дополнительно включает в себя блок 121 записи.
Блок 121 записи записывает (то есть, сохраняет) сигнал, выводимый из блока 102 обработки декодирования канала передачи (такого как пакеты TS транспортных потоков MPEG), на носители записи (то есть, для хранения данных), включающие в себя оптические диски, жесткие диски (магнитные диски) и запоминающие устройства типа флэш.
Описанная выше система приема по фиг.22, например, может применяться для устройств записи, предназначенных для записи телевизионных широковещательных передач.
На фиг.22 система приема может быть, в качестве альтернативы, выполнена так, что она включает в себя блок 103 обработки декодирования источника информации. В этом варианте блок 103 обработки декодирования источника информации выполняет обработку декодирования источника информации для принятого сигнала таким образом, чтобы изображения и звуки, получаемые из декодированного сигнала, могли быть записаны блоком 121 записи.
Описание компьютера, в котором применяют настоящее изобретение
Последовательность процессов, описанных выше, может выполняться либо с использованием аппаратных средств, либо программных средств. В случае, когда эти процессы выполняют с помощью программных средств, программы, составляющие программное средство, устанавливают в соответствующие компьютеры для выполнения процесса.
На фиг.23 показана типичная структура компьютера, в котором применяют настоящее изобретение и в котором установлены соответствующие программы для выполнения последовательности описанных выше процессов.
Программы могут быть записаны заранее на жесткий диск 205 или в ПЗУ 203, предоставленные как встроенный в компьютер носитель записи.
В качестве альтернативы, программы могут быть сохранены (записаны) на съемном носителе 211 записи, который может быть предоставлен в виде так называемого программного пакета. Съемные носители 211 записи, например, включают в себя гибкие диски, CD-ROM (постоянное запоминающее устройство на компакт-диске), МО (магнитооптические) диски, DVD (цифровые универсальные диски), магнитные диски и полупроводниковое запоминающее устройство.
Помимо установки описанных выше съемных носителей записи 211 в компьютер, программы могут быть загружены в компьютер через сети связи или через сети широковещательной передачи и могут быть установлены на внутренний жесткий диск 205. А именно, программы могут быть переданы, например, с сайтов загрузки в компьютер по беспроводному каналу передачи данных через спутник цифровой широковещательной передачи или по проводам по таким сетям, как LAN (локальные вычислительные сети) и через Интернет.
Компьютер включает в себя ЦПУ (центральное процессорное устройство) 202, с которым соединен интерфейс 210 ввода/вывода через шину 201.
Когда пользователь вводит команды в ЦПУ 202 через интерфейс 210 ввода/вывода, как правило, воздействуя на блок 207 ввода, ЦПУ 202 выполняет соответствующие программы, сохраненные в ПЗУ (постоянное запоминающее устройство) 203. В качестве альтернативы, ЦПУ 202 может загружать соответствующие программы с жесткого диска 205 в ОЗУ (оперативное запоминающее устройство) 204 для выполнения программы.
ЦПУ 202, таким образом, выполняет свою обработку, следуя описанным выше блок-схемам последовательности операций или используя структуры, представленные на блок-схемах, описанных выше. Результаты обработки могут быть выведены из выходного блока 206, переданы через блок 208 передачи данных или записаны на жесткий диск 205, в соответствии с необходимостью.
Входной блок 207 обычно состоит из клавиатуры, мыши и микрофона. Выходной блок 206, например, состоит из LCD (жидкокристаллический дисплей) и громкоговорителей.
В данном описании этапы обработки, которые описывают программы для обеспечения выполнения компьютером операций, могут не представлять исключительно процессы, которые должны быть выполнены в последовательности, представленной в блок-схемах последовательности операций, на основе временной последовательности. В частности, этапы также могут представлять процессы, которые выполняются параллельно или по отдельности (например, при параллельной обработке или используя объектно-ориентированную обработку).
Программы могут быть обработаны одиночным компьютером (или процессором) или с использованием множества компьютеров на распределенной основе. Программа также может быть передана в удаленный компьютер или компьютеры для выполнения.
Для специалистов в данной области техники будет понятно, что различные модификации, комбинации, подкомбинации и изменения могут возникать в зависимости от требований к конструкции и других факторов, если только они находятся в пределах объема приложенной формулы изобретения или ее эквивалентов.
Настоящая заявка содержит предмет изобретения, относящийся к тому, что раскрыто в приоритетной заявке JP 2009-167497 на японский патент, поданной в японское патентное ведомство 16 июля 2009 г., полное содержание которой включено в настоящую заявку посредством ссылки.
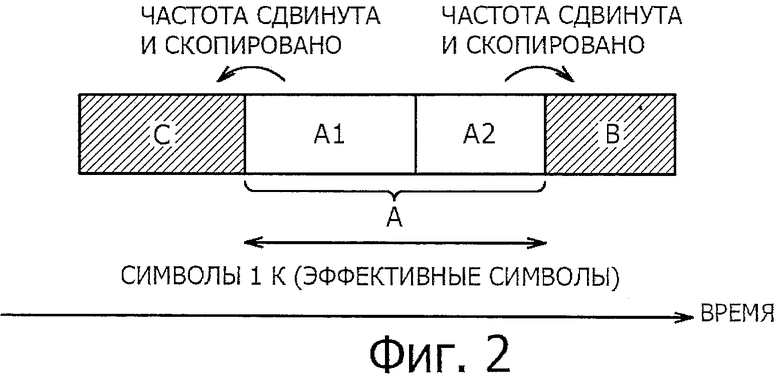
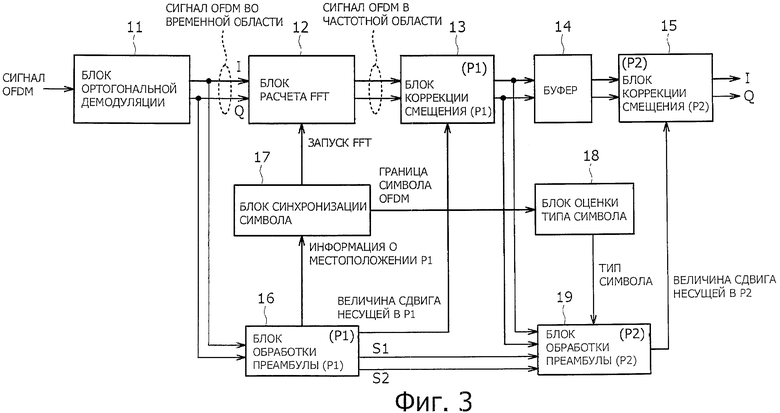
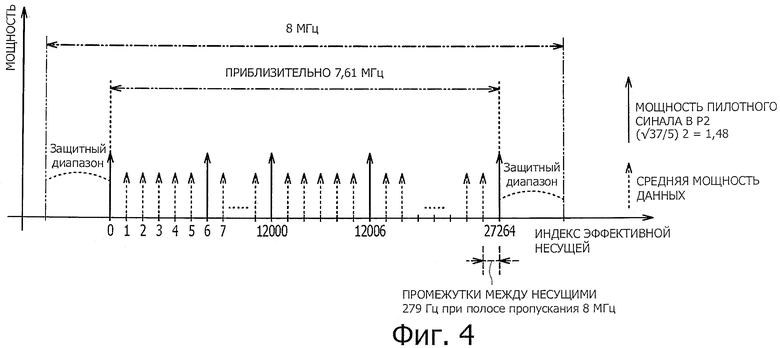
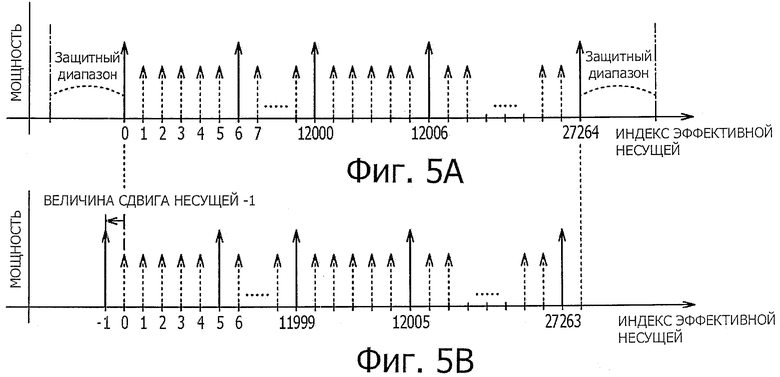

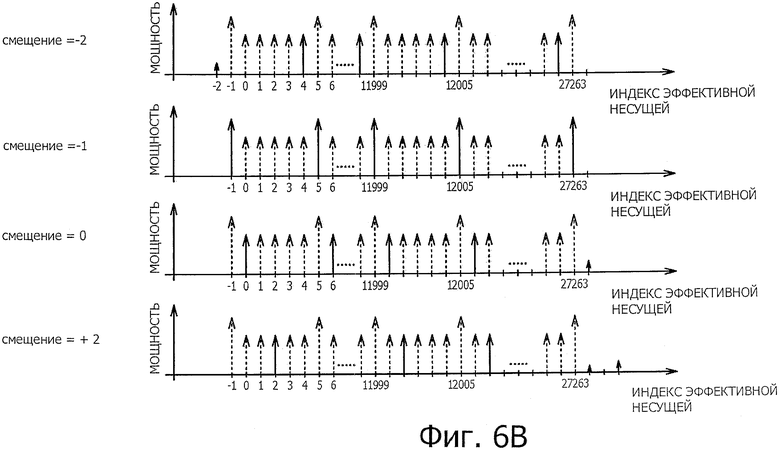
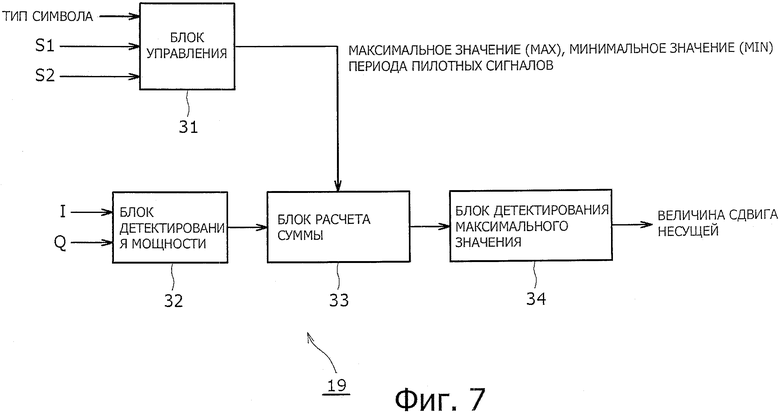
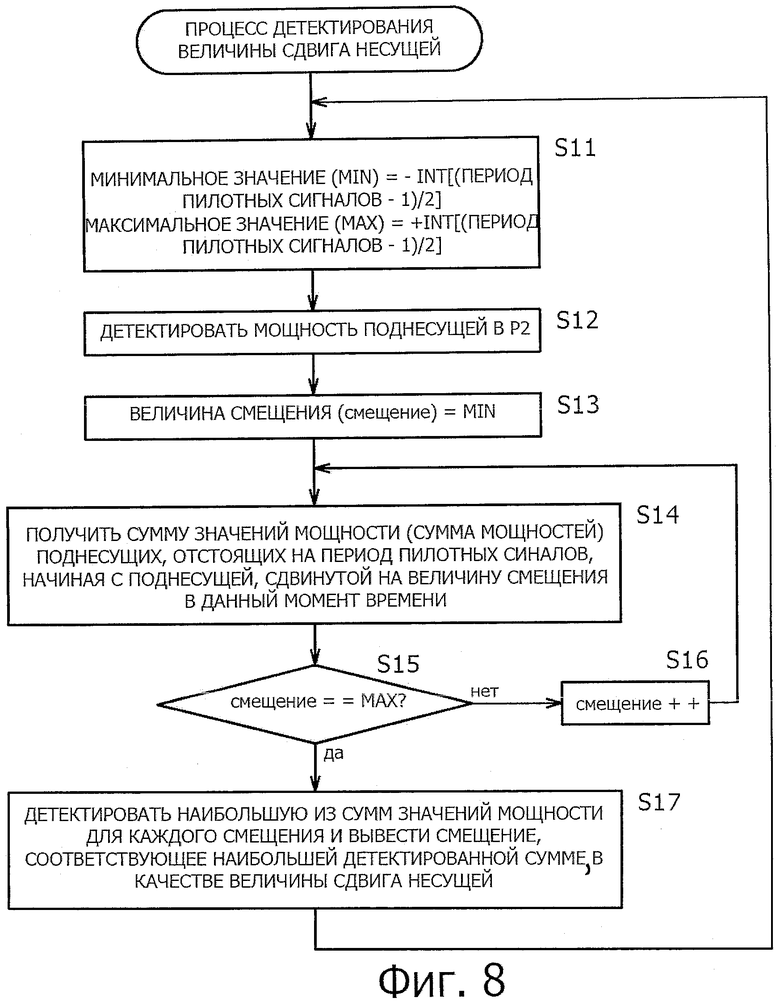
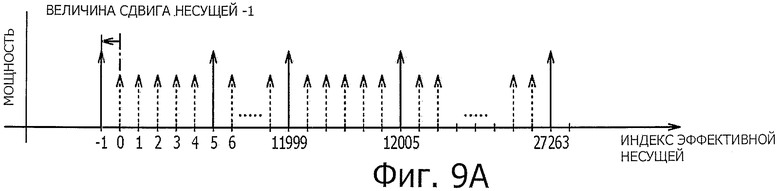
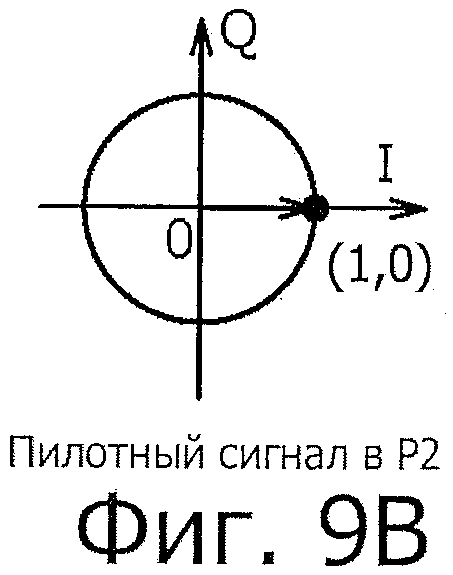
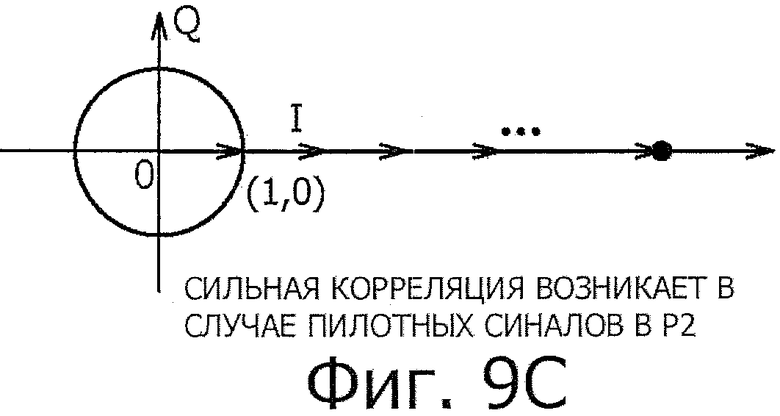
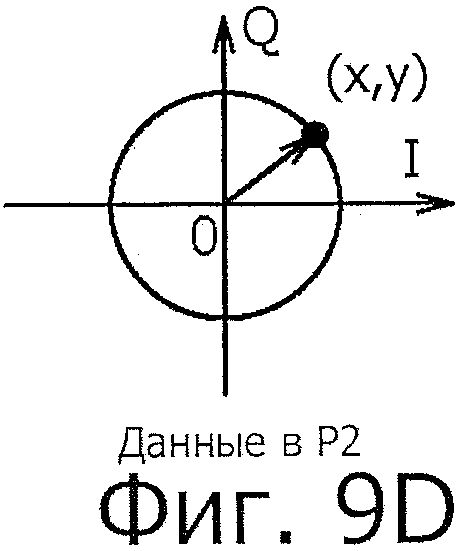
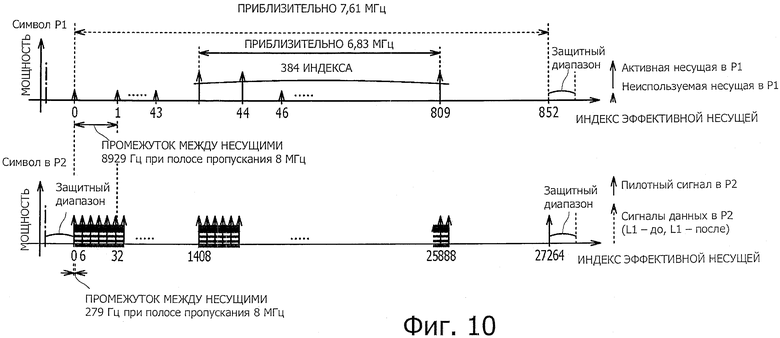
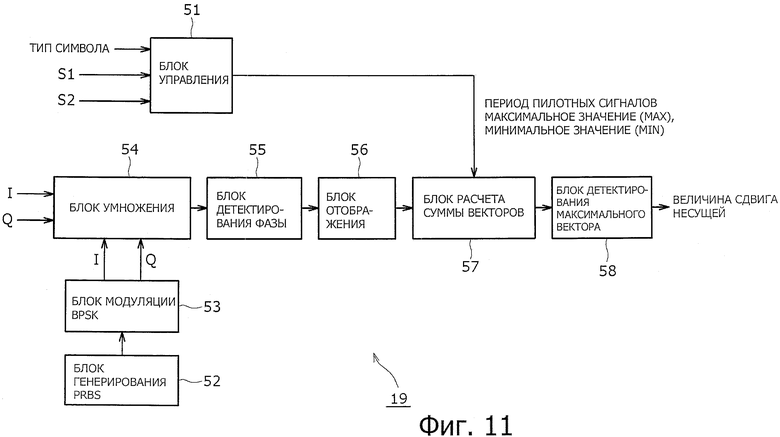
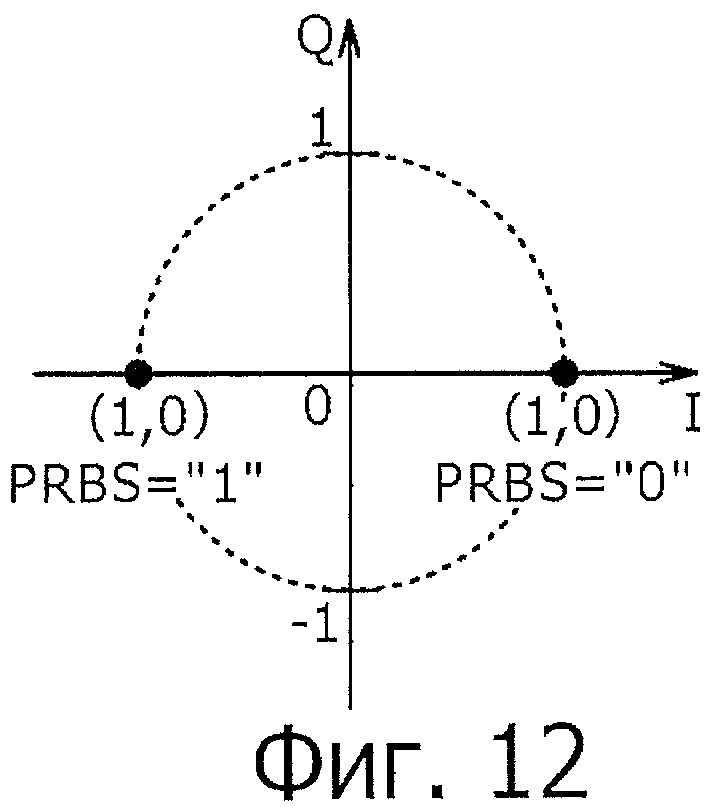
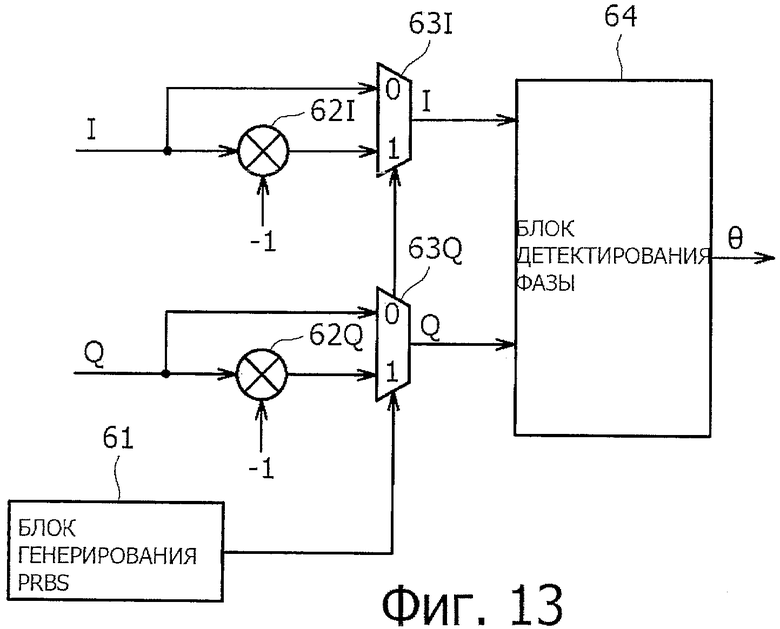
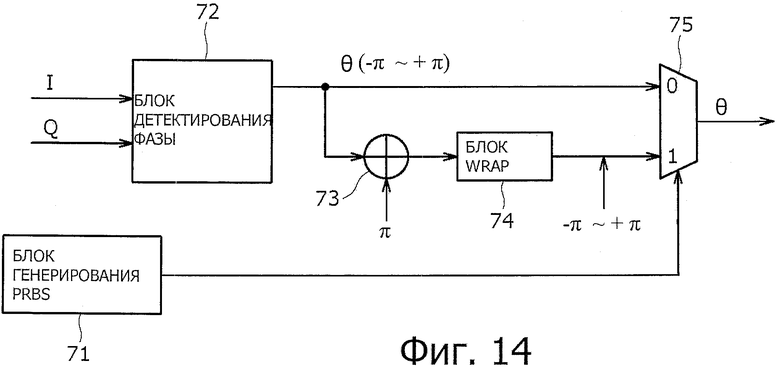
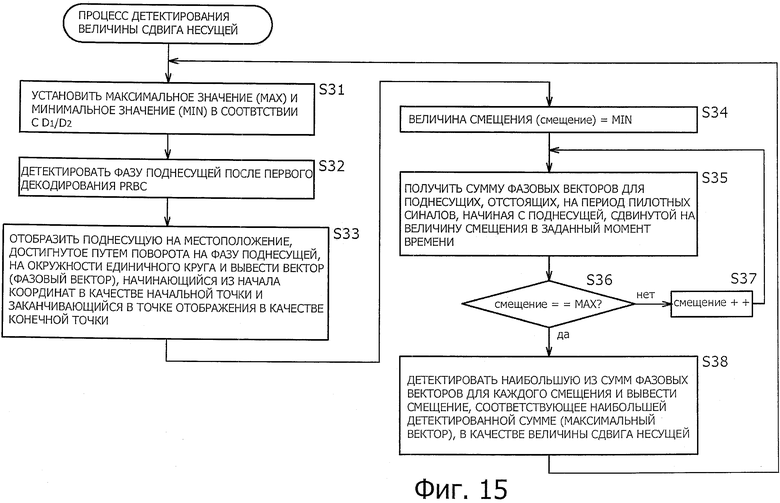
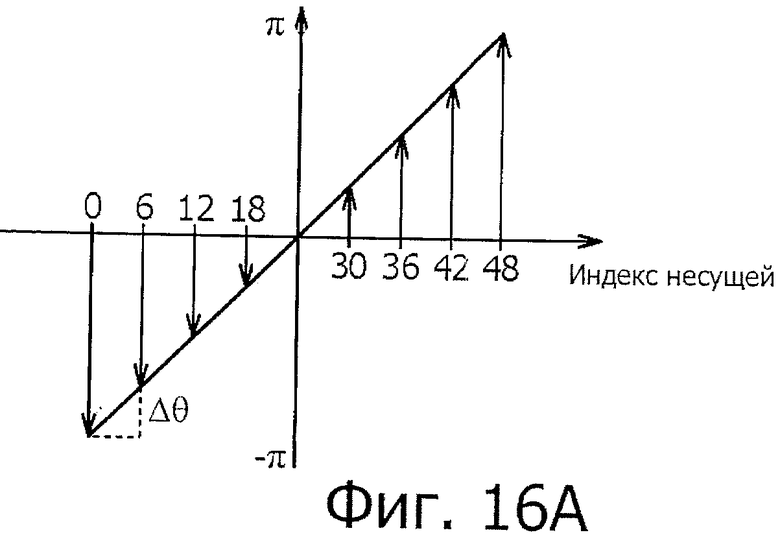
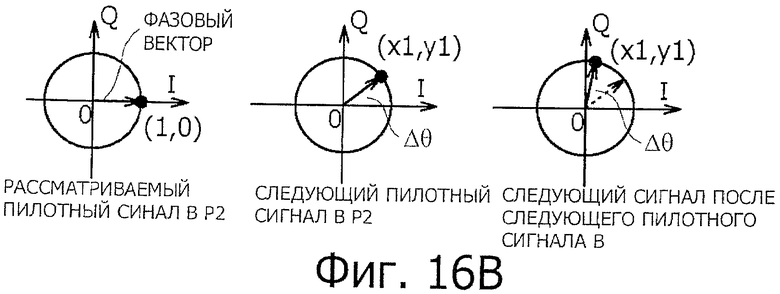
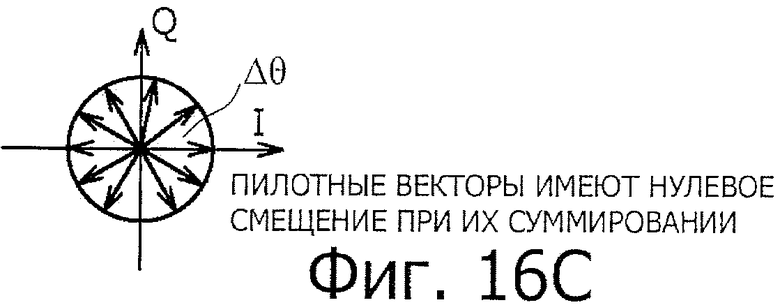
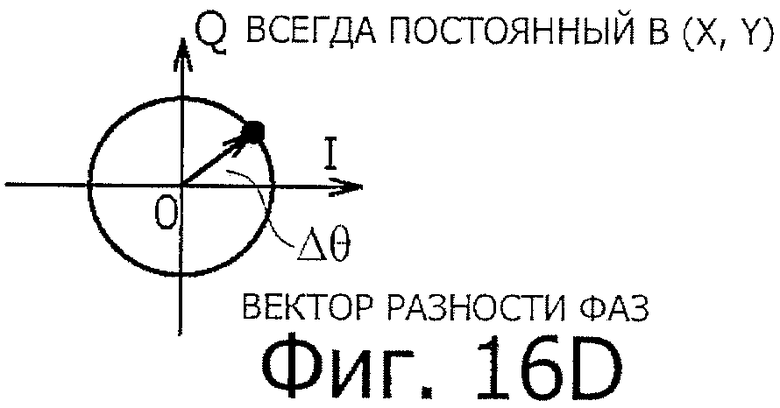
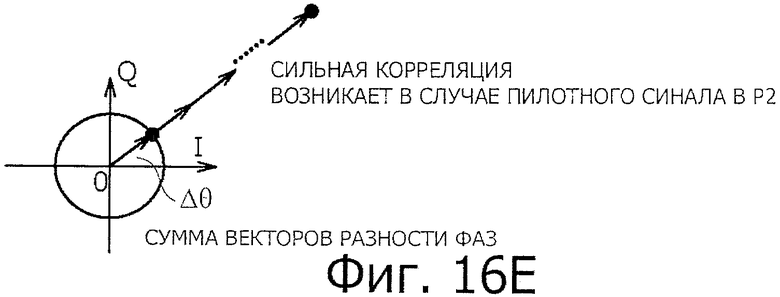
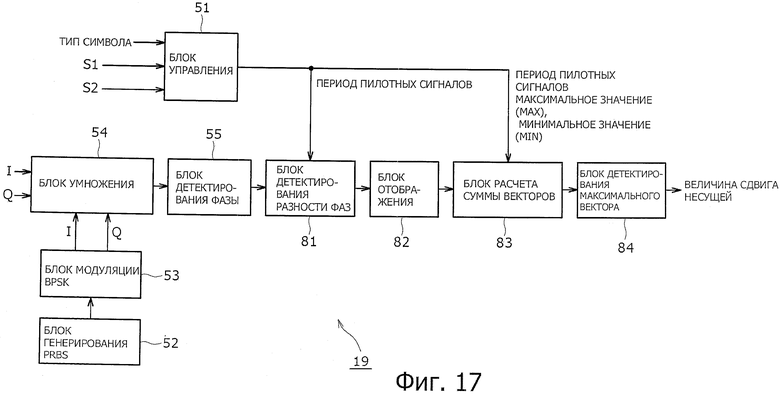
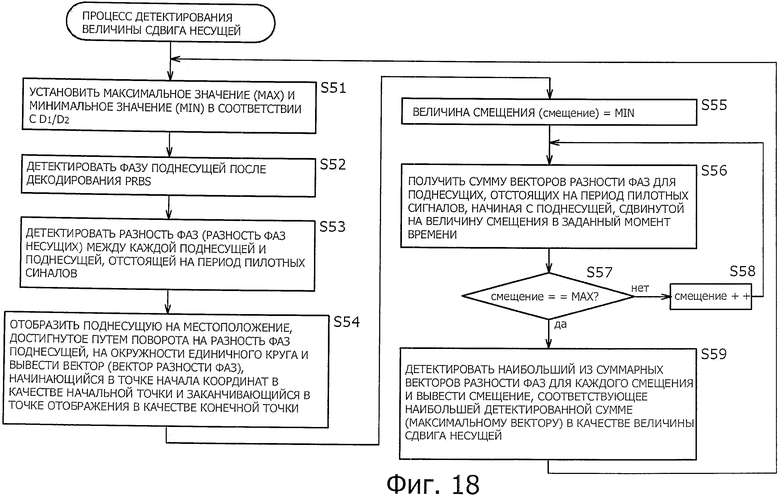
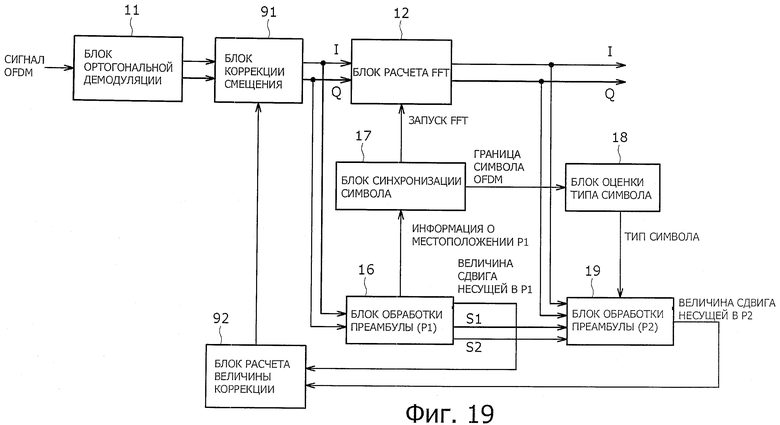
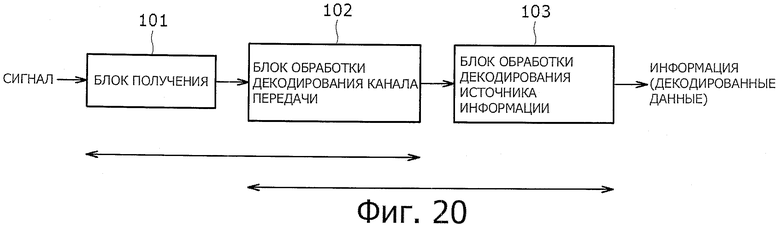
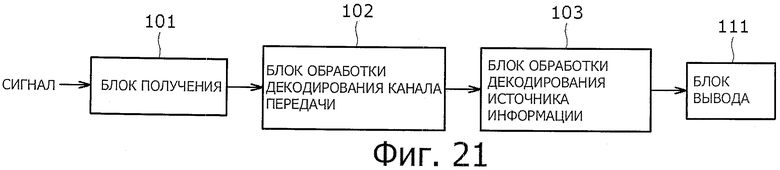
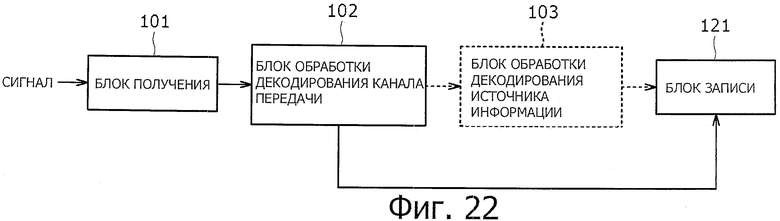
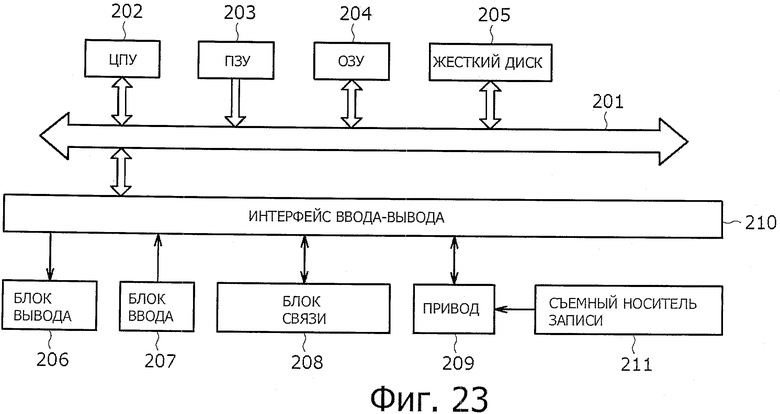
Изобретение относится к устройству и способу обработки сигнала, а также к приемной системе, предназначенным для быстрой и с требуемой точностью оценки ошибок несущей, используемых, например, для демодуляции сигнала OFDM. Устройство обработки сигнала включает в себя блок обработки, выполненный с возможностью выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала мультиплексирования с ортогональным частотным разделением, известного как сигнал OFDM; и блок коррекции, выполненный с возможностью коррекции сигнала OFDM в соответствии с величиной сдвига несущей. Сигнал OFDM включает в себя сигнал первой преамбулы, содержащий поднесущие, и сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы. Сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих. Блок обработки детектирует величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы. 7 н. и 9 з.п. ф-лы, 32 ил.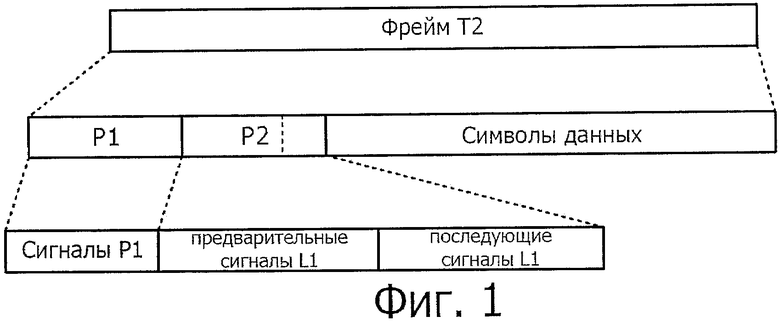
1. Устройство обработки сигнала, содержащее:
средство обработки для выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала мультиплексирования с ортогональным частотным разделением, известного как сигнал OFDM; и
средство коррекции для коррекции сигнала OFDM в соответствии с величиной сдвига несущей; при этом
сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; а
средство обработки выполнено с возможностью детектировать величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
2. Устройство обработки сигнала по п.1, в котором средство обработки включает в себя:
средство детектирования фазы для детектирования фаз поднесущих, содержащихся в сигнале второй преамбулы;
средство детектирования разности фаз для детектирования разности фаз между каждой поднесущей, содержащейся в сигнале второй преамбулы, с одной стороны, и поднесущей, отстоящей от рассматриваемой поднесущей на упомянутое заданное количество поднесущих, с другой стороны;
средство отображения для отображения рассматриваемой поднесущей на местоположение, достигаемое в результате поворота на упомянутую разность фаз по окружности круга с центром в начале координат IQ совокупности, причем средство отображения дополнительно выполнено с возможностью получения вектора разности фаз, начальная точка которого представляет собой упомянутое начало координат, а конечная точка представляет собой местоположение, на которое отображена упомянутая поднесущая;
средство расчета суммы векторов, выполненное так, что для каждой из множества величин смещения, составляющих величины сдвига несущей на заданное количество поднесущих, средство расчета суммы векторов выполнено с возможностью определять сдвинутое местоположение, достигнутое в результате сдвига на каждую из упомянутых величин смещения относительно первой поднесущей в сигнале второй преамбулы, получать вектор разности фаз, начинающийся из упомянутого сдвинутого местоположения и заканчивающийся в каждой из поднесущих, расположенных через интервалы с упомянутым заданным количеством поднесущих, и суммировать полученные векторы разности фаз в качестве корреляции каждой из упомянутых поднесущих, причем упомянутые величины смещения расположены в диапазоне от минимального до максимального значения; и
средство детектирования максимального значения для детектирования максимальной суммы среди сумм векторов разности фаз для каждой из упомянутого множества величин смещения, причем средство детектирования максимального значения дополнительно выполнено с возможностью детектировать величину смещения, соответствующую упомянутой максимальной сумме, в качестве величины сдвига несущей.
3. Устройство обработки сигнала по п.2, в котором
каждый из упомянутых пилотных сигналов, содержащихся в сигнале второй преамбулы, получен путем модуляции псевдослучайной двоичной последовательности, известной как PRBS, с использованием двоичной фазовой манипуляции, известной как BPSK; и
средство детектирования фазы выполнено с возможностью детектирования фаз упомянутых поднесущих, умноженных на модулированный сигнал, полученный путем модуляции последовательности PRBS посредством BPSK.
4. Устройство обработки сигнала по п.3, в котором минимальное и максимальное значения упомянутых величин смещения получены с помощью частного от деления промежутка между поднесущими в сигнале первой преамбулы на промежуток между поднесущими в сигнале второй преамбулы.
5. Устройство обработки сигнала по п.1, в котором средство обработки включает в себя:
средство детектирования фазы для детектирования фаз поднесущих, содержащихся в сигнале второй преамбулы;
средство отображения для отображения каждой из упомянутых поднесущих на местоположение, достигаемое в результате поворота на фазу рассматриваемой поднесущей по окружности круга с центром в точке начала координат IQ совокупности, причем средство отображения дополнительно выполнено с возможностью получения вектора фазы, начальная точка которого представляет собой упомянутое начало координат, а конечная точка представляет собой местоположение, на которое отображена рассматриваемая поднесущая;
средство расчета суммы векторов, выполненное с возможностью для каждой из множества величин смещения, составляющих величины сдвига несущей на заданное количество поднесущих, определять сдвинутое местоположение, достигнутое в результате сдвига на каждую из упомянутых величин смещения относительно первой поднесущей в сигнале второй преамбулы, получать фазовый вектор, начинающийся в упомянутом сдвинутом местоположении и заканчивающийся в каждой из поднесущих, расположенных через интервалы с упомянутым заданным количеством поднесущих, и суммировать полученные фазовые векторы в качестве корреляции каждой из упомянутых поднесущих, причем упомянутые величины смещения находятся в диапазоне от минимального до максимального значения; и
средство детектирования максимального значения для детектирования максимальной суммы среди сумм фазовых векторов для каждой из упомянутого множества величин смещения, причем упомянутое средство детектирования максимального значения дополнительно выполнено с возможностью детектировать величину смещения, соответствующую упомянутой максимальной сумме, в качестве величины сдвига несущей.
6. Устройство обработки сигнала по п.5, в котором
каждый из упомянутых пилотных сигналов, содержащихся в сигнале второй преамбулы, получен путем модуляции псевдослучайной двоичной последовательности, известной как PRBS, с использованием двоичной фазовой манипуляции, известной как BPSK; и
средство детектирования фазы выполнено с возможностью детектирования фаз упомянутых поднесущих, умноженных на модулированный сигнал, полученный в результате модуляции последовательности PRBS посредством BPSK.
7. Устройство обработки сигнала по п.6, в котором минимальное и максимальное значения упомянутых величин смещения получены с помощью частного от деления промежутка между поднесущими в упомянутом сигнале первой преамбулы на промежуток между поднесущими в упомянутом сигнале второй преамбулы.
8. Устройство обработки сигнала по п.1, в котором средство обработки включает в себя:
средство детектирования мощности для детектирования величины мощности, соответствующей мощности каждой из поднесущих, содержащихся в сигнале второй преамбулы;
средство расчета суммы, выполненное с возможностью для каждой из множества величин смещения, составляющих величины сдвига несущей на заданное количество поднесущих, определять сдвинутое местоположение, достигнутое в результате сдвига на каждую из упомянутых величин смещения относительно первой поднесущей в сигнале второй преамбулы, и суммировать значения мощности, детектируемые через интервалы с упомянутым заданным количеством поднесущих относительно упомянутого сдвинутого местоположения, в качестве корреляции каждой из упомянутых поднесущих, причем упомянутые величины смещения расположены в диапазоне от минимального до максимального значения; и средство детектирования максимального значения для детектирования максимальной суммы среди сумм значений мощности для каждой из упомянутого множества величин смещения, причем средство детектирования максимального значения дополнительно выполнено с возможностью детектировать величину смещения, соответствующую упомянутой максимальной сумме значений мощности, в качестве величины сдвига несущей.
9. Устройство обработки сигнала по п.8, в котором максимальное и минимальное значения упомянутых величин смещения получены с помощью упомянутого заданного количества.
10. Устройство обработки сигнала по п.1, в котором
устройство обработки сигнала соответствует стандарту, называемому DVB-T2; и
сигналы первой и второй преамбулы соответствуют символам Р1 и Р2, соответственно, которые определены стандартом DVB-T2.
11. Способ обработки сигнала, содержащий этапы, на которых:
вызывают выполнение устройством обработки сигнала процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала мультиплексирования с ортогональным частотным разделением, известного как сигнал OFDM; и
вызывают выполнение устройством обработки сигнала коррекции сигнала OFDM в соответствии с величиной сдвига несущей; при этом
сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; и
в процессе детектирования величины сдвига несущей детектируют величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
12. Приемная система, содержащая:
блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи в отношении сигнала, полученного по каналу передачи, причем процесс декодирования канала передачи включает в себя, по меньшей мере, процесс коррекции ошибок, возникших в канале передачи; и
блок обработки декодирования источника информации, выполненный с возможностью выполнения процесса декодирования источника информации в отношении сигнала, прошедшего процесс декодирования канала передачи, причем процесс декодирования источника информации включает в себя, по меньшей мере, процесс распаковки сжатой информации обратно в исходную информацию; при этом
сигнал, получаемый по каналу передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, полученный путем выполнения, по меньшей мере, кодирования со сжатием для сжатия информации и кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи;
блок обработки декодирования канала передачи включает в себя
средство обработки для выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM, и
средство коррекции для коррекции сигнала OFDM в соответствии с
величиной сдвига несущей;
причем сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
при этом сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; а
средство обработки выполнено с возможностью детектировать величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
13. Приемная система, содержащая:
блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи в отношении сигнала, полученного по каналу передачи, причем процесс декодирования канала передачи включает в себя, по меньшей мере, процесс коррекции ошибок, возникших в упомянутом канале передачи; и
блок вывода, выполненный с возможностью вывода изображений и звуков на основе сигнала, прошедшего процесс декодирования канала передачи; при этом
сигнал, получаемый по каналу передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, полученный путем выполнения, по меньшей мере, кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи;
блок обработки декодирования канала передачи включает в себя
средство обработки для выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM, и
средство коррекции для коррекции сигнала OFDM в соответствии с величиной сдвига несущей;
причем сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
при этом сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; а
средство обработки выполнено с возможностью детектировать величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
14. Приемная система, содержащая:
блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи в отношении сигнала, полученного по каналу передачи, причем процесс декодирования канала передачи включает в себя, по меньшей мере, процесс коррекции ошибок, возникших в упомянутом канале передачи; и
блок записи, выполненный с возможностью записи сигнала, прошедшего процесс декодирования канала передачи; при этом сигнал, получаемый по каналу передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, полученный в результате выполнения, по меньшей мере, кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи;
блок обработки декодирования канала передачи включает в себя
средство обработки для выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM, и
средство коррекции для коррекции сигнала OFDM в соответствии с величиной сдвига несущей;
сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; а
средство обработки выполнено с возможностью детектировать величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
15. Приемная система, содержащая:
средство получения для получения сигнала по каналу передачи; и
блок обработки декодирования канала передачи, выполненный с возможностью выполнения процесса декодирования канала передачи в отношении сигнала, полученного по каналу передачи, причем процесс декодирования канала передачи включает в себя, по меньшей мере, процесс коррекции ошибок, возникающих в канале передачи; при этом сигнал, полученный по каналу передачи, представляет собой сигнал мультиплексирования с ортогональным частотным разделением, известный как сигнал OFDM, полученный путем выполнения, по меньшей мере, кодирования с коррекцией ошибок для коррекции ошибок, возникающих в канале передачи;
блок обработки декодирования канала передачи включает в себя
средство обработки для выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала OFDM, и средство коррекции для коррекции сигнала OFDM в соответствии с величиной сдвига несущей;
сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
причем сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; а
средство обработки выполнено с возможностью детектировать величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
16. Устройство обработки сигнала, содержащее:
блок обработки, выполненный с возможностью выполнения процесса детектирования величины сдвига несущей для детектирования величины сдвига несущей, составляющей ошибку несущей, используемую для демодуляции сигнала мультиплексирования с ортогональным частотным разделением, известного как сигнал OFDM; и
блок коррекции, выполненный с возможностью коррекции сигнала OFDM в соответствии с величиной сдвига несущей; при этом
сигнал OFDM включает в себя
сигнал первой преамбулы, содержащий поднесущие, и
сигнал второй преамбулы, содержащий поднесущие, промежуток между которыми уже промежутка между поднесущими, содержащимися в сигнале первой преамбулы;
сигнал второй преамбулы включает в себя пилотные сигналы, которые представляют собой известные сигналы, расположенные через интервалы с заданным количеством поднесущих; а
блок обработки выполнен с возможностью детектировать величину сдвига несущей с использованием корреляции поднесущих, содержащихся в одном таком сигнале второй преамбулы.
| ЕР 08823804 А2, 05.08.1997 | |||
| УСТРОЙСТВО И СПОСОБ, ПРЕДНАЗНАЧЕННЫЕ ДЛЯ ОЦЕНКИ ПОМЕХ И ШУМА В СИСТЕМЕ СВЯЗИ | 2004 |
|
RU2324291C2 |
| ВРЕМЕННАЯ ФИЛЬТРАЦИЯ ДЛЯ УМЕНЬШЕНИЯ ИЗБЫТОЧНОЙ ЗАДЕРЖКИ В СИСТЕМАХ С OFDM | 2005 |
|
RU2359419C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ ПРЕАМБУЛЫ ДЛЯ АДАПТИВНОЙ АНТЕННОЙ СИСТЕМЫ В СИСТЕМЕ СВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ И ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2005 |
|
RU2328826C1 |

