Область техники, к которой относится изобретение
Настоящее изобретение относится к приемному устройству, способу приема и приемной системе и, в частности, к приемному устройству, способу приема и приемной системе, позволяющим повысить стабильность и помехоустойчивость в начале приема сигнала, даже когда нужно принимать сигнал, отличный от формата кадра T2.
Уровень техники
В системах наземного цифрового вещания и других в качестве способа модуляции данных применяют мультиплексирование с ортогональным разделением частот (OFDM).
При использовании OFDM генерируют большое число ортогональных поднесущих в полосе частот передачи и осуществляют цифровую модуляцию, например фазовую манипуляцию (PSK) или квадратурную амплитудную модуляцию (QAM), согласно которым данные назначают амплитуде или фазе этих поднесущих.
При использовании OFDM, поскольку данные распределяют по нескольким поднесущим, модуляцию можно осуществлять с применением алгоритмов обратного быстрого преобразования Фурье (IFFT), посредством которых выполняют обратное преобразование Фурье. Кроме того, демодуляцию OFDM-сигнала, полученного в результате описанной выше модуляции, можно производить с использованием алгоритмов быстрого преобразования Фурье (FFT), реализующих преобразование Фурье.
Соответственно, передающее устройство, которое передает OFDM-сигнал, может быть выполнено с использованием схемы, выполняющей обратное преобразование FFT, a приемное устройство, которое принимает OFDM-сигнал, может быть выполнено с использованием схемы, выполняющей преобразование FFT.
Кроме того, при использовании OFDM единицей передачи данных является символ OFDM.
Такой символ OFDM в общем случае формируется из эффективного символа, имеющего длительность, равную периоду сигнала, на котором осуществляется обратное преобразование БРФ при модуляции, и располагающегося перед эффективным символом защитного интервала, в который копируют часть задней половины эффективного символа, как она есть. Создание защитного интервала в начале символа OFDM указанным способом позволяет повысить устойчивость системы к помехам многолучевого распространения.
Кроме того, при применении OFDM в передаваемый сигнал дискретно по временной оси или по частотной оси вставляют пилот-сигнал, представляющий собой известный сигнал, т.е. сигнал, известный приемному устройству, а на приемной стороне используют этот пилот-сигнал для синхронизации, оценки характеристик линии передачи и т.п.
Здесь следует отметить, что в стандартах наземного цифрового вещания, использующего OFDM, определена единица сигнала, именуемая кадром, т.е. кадром передачи OFDM, формируемым из нескольких символов OFDM, а передача данных осуществляется в единицах кадра.
Приемное устройство для приема такого OFDM-сигнала, описанного выше, использует несущую этого OFDM-сигнала для осуществления цифровой ортогональной демодуляции OFDM-сигнала.
Однако в общем случае частота несущей OFDM-сигнала, используемой для цифровой ортогональной демодуляции в приемном устройстве, не совпадает с частотой несущей OFDM-сигнала, используемой в передающем устройстве, которое передает этот OFDM-сигнал, а содержит некоторые погрешности. Другими словами, частота несущей OFDM-сигнала, используемая для цифровой ортогональной демодуляции, смещена или сдвинута относительно центральной частоты сигнала промежуточной частоты (IF) для OFDM-сигнала, принимаемого посредством приемного устройства.
Поэтому приемное устройство выполняет процедуру измерения величины смещения несущей, чтобы определить величину смещения или сдвига несущей, представляющую собой погрешность частоты несущей OFDM-сигнала, используемого для цифровой ортогональной демодуляции, и процедуру коррекции сдвига с целью коррекции OFDM-сигнала в соответствии с величиной смещения несущей для устранения этого смещения несущей.
Одними из стандартов наземного цифрового вещания, применяющих OFDM-модуляцию с описанными выше характеристиками, являются стандарты DVB-T2, представляющие собой европейские стандарты цифрового вещания второго поколения. Эти стандарты DVB-T2 описаны в документе «Канальное кодирование и модуляция структуры кадров для системы цифрового наземного телевизионного вещания второго поколения (DVB-T2)» ("Frame structure channel coding and modulation for a second generation digital terrestrial television broadcasting system (DVB-T2)"), DVB Document A 122, июнь 2008 (далее именуемом Непатентный документ 1).
В стандарте DVB-T2 единицей передачи данных является кадр передачи, именуемый кадр T2. Кроме того, в стандарте DVB-T2 с кадрами T2 мультиплексируют и передают совместно сигнал, именуемый «Кадр перспективного расширения» (FEF (Future Extension Frame)), структура которого отличается от структуры кадра T2.
Фиг.1 иллюстрирует конфигурацию кадра в стандарте DVB-T2.
Как показано на фиг.1, в стандарте DVB-T2 мультиплексируют кадр T2 и сегмент с кадром перспективного расширения FEF для передачи. Однако FEF-сегмент вставляют только там, где это нужно.
Каким именно образом вставлять FEF-сегмент, решают однозначным образом на основе величины интервала между FEF-сегментами и длины FEF-сегмента. Значения этих параметров включены в предсигнальный отрезок L1 кадра T2, показанного на фиг.2, обсуждаемой далее. Например, если величина интервала между FEF-сегментами равна n, a длина FEF-сегмента равна m, вставляют один FEF-сегмент в n кадров T2, а длина FEF-сегмента составляет m отсчетов. Другими словами, A=B=C = интервал FEF (n).
Фиг.2 иллюстрирует формат кадра T2.
Как показано на фиг.2, кадр T2 включает расположенные в указанном порядке символ P1, символы P2, а также символы, называемые нормальными, и символ, именуемый FC (конец кадра), (символы обоих типов представляют собой символы данных).
Следует отметить, что сегмент, обозначенный GI на фиг.2, представляет защитный интервал OFDM-символа, а символ P1 не имеет такого интервала GI.
Символ P1 представляет собой символ для передачи служебного сигнала P1. Этот символ P1 включает параметры S1 и S2 передачи. Эти параметры S1 и S2 передачи обозначают, каким из способов - SISO (Один вход - один выход (означает одну передающую и одну приемную антенны)) или MISO (Несколько входов - один выход (означает несколько передающих антенн, но одну приемную антенну)), должны быть переданы символы P2, размерность преобразования FFT при вычислении преобразования FFT для символов P2, т.е. число отсчетов или символов объекта одного цикла вычислений преобразования FFT, и т.д.
Эти символы P2 представляют собой символы для передачи пред-сигналов L1 и пост-сигналов L1. Кроме того, поскольку символы P2 включают большее количество пилот-сигналов по сравнению с обычными символами, использование этих символов P2 может повысить точность определения различных погрешностей с применением пилот-сигналов по сравнению с обычными символами.
Пред-сигналы L1 включают информацию, необходимую для декодирования постсигналов L1. Пост-сигналы L1 включает информацию, необходимую для доступа к конвейеру физического уровня.
Здесь пред-сигналы L1 включают в себя пилотную схему (PP), представляющую размещение пилот-сигнала, указывая, в каком символе или поднесущей присутствует пилот-сигнал, представляющий собой известный сигнал, присутствие или отсутствие (BWT_EXT) расширения полосы передачи для передачи OFDM-сигнала, число (NDSYM) OFDM-символов в одном кадре T2 и т.п. Информация, включенная в пред-сигналы L1, необходима для демодуляции символов данных, включая символ FC конца кадра.
Пред-сигналы L1 включают дополнительно информацию, представляющую такие FEF-секции, как FEF-сегмент и интервала между FEF-сегментами, показанных точнее на фиг.1, и ассоциированную информацию, представляющую тип кадра FEE, такую как параметр FEF_Type.
Фиг.3 иллюстрирует формат FEF-сегмента. На фиг.3 FEF-сегмент полностью не определен за исключением того, что максимальная длина такого сегмента составляет 250 мс, что равно длине кадра T2, и в начало FEF-сегмента помещен символ P1. Например, средняя мощность сигнала в FEF-сегменте может отличаться от мощности в кадре T2, либо FEF-сегмент может вообще не включать никакого сигнала. Другими словами, поскольку неизвестно, имеет ли FEF-сегмент конфигурацию кадра, или нет, в стандарте DVB-T2 этот отрезок именуется FEF-сегментом. Следует отметить, что в последующем описании FEF-сегмент иногда обозначают просто FEF.
Соответственно, хотя приемное устройство сегодня не нуждается в получении информации, заключенной в FEF-сегменте, за исключением символа P1, оно должно определить сам факт вставки FEF-сегментов и работать таким образом, чтобы эти FEF-сегменты не влияли на прием кадров T2.
В частности, приемное устройство должно осуществить обнаружение символа P1 и определить отрезок, куда вставлен FEF-сегмент, на основе информации, включенной в символ P1, после чего работать таким образом, чтобы сигнал на этом отрезке не влиял на обычный прием кадров T2 в период после начала приема и до получения пред-сигнала L1.
На фиг.4 показана структура символа P1.
Изображенный на фиг.4 символ P1 согласно стандартам DVB-T2 служит следующим целям:
a. Приемное устройство получает возможность уже на ранней стадии решить, что принимаемый сигнал представляет собой сигнал согласно стандартам DVB-T2;
b. Приемное устройство получает возможность решить, что сигнал преамбулы сам по себе является сигналом преамбулы кадра стандартов DVB-T2;
c. Передается параметр передачи, необходимый для начала демодуляции; и
d. Приемное устройство может определить положение кадра и выполнить коррекцию погрешностей несущей.
Как показано на фиг.4, символ P1 имеет 1k (=1024) символов в качестве эффективных символов. Символ P1 структурирован таким образом, что сигнал C, получаемый путем сдвига по частоте части эффективных символов A на начальной стороне на величину частоты fSH, скопирован на участок спереди от эффективных символов A, а сигнал B, получаемый путем сдвига по частоте оставшейся части этих эффективных символов A на величину частоты fSH, копируют на участок сзади от этих эффективных символов А. Сдвиг частоты делает менее вероятным ошибочное распознавание сигнала помехи в качестве символа P1.
Приемное устройство использует тот факт, что символ P1 содержит копию части собственных данных, для определения величины корреляции для каждой секции с целью обнаружения этого символа P1. Обнаружение символа P1 осуществляется, например, при начальном сканировании для проверки, какой канал используется для передачи сигнала стандартов DVB-T2.
Над обнаруженным указанным образом символом P1 выполняют фиксированные процедуры обработки, такие как коррекция частоты, вычисление преобразования FFT, корреляционные вычисления последовательности распределения несущих (CDS), скремблирование и демодуляция в соответствии со стандартом дифференциальной двухуровневой фазовой манипуляции (DBPSK), с целью декодирования параметров S1 и S2, включенных в символ P1.
Фиг.5A и 5B иллюстрируют параметры передачи S1 и S2, включенные в символ P1. Следует отметить, что на фиг.5A и 5B литера X представляет 0 или 1. Параметр S1 представлен величиной из 3 бит, как видно на фиг.5A, а параметр S2 представлен величиной из 4 бит, как видно на фиг.5B.
Когда S1 имеет величину 000, это означает, что принятый символ P1 указывает на кадр T2 в формате SISO. Когда S1 имеет величину 001, это означает, что принятый символ P1 указывает на кадр T2 в формате MISO. Когда S1 имеет величину 010, это означает, что принятый символ P1 не является преамбулой кадра T2. Когда S1 имеет одну из величин 011, 100, 101, 110 или 111, это означает «Зарезервировано». Короче говоря, если параметр S1 имеет любую величину, отличную от 000 или 001, принятый символ P1 указывает на сигнал (FEF), с которым рассматриваемое приемное устройство, принимающее только кадры T2, несовместимо.
Когда самый младший бит (LSB) параметра S2 равен 0, это означает, что принимаемый сигнал является «Несмешанным» ("Not Mixed"), а когда этот бит LSB параметра S2 равен 1, это означает, что принимаемый сигнал является «Смешанным» ("Mixed"). Здесь «Несмешанный» означает, что символ P1 в принимаемом в данный момент сигнале является таким же, как и аналогичные символы в других кадрах, а «Смешанный» означает, что символ P1 в принимаемом в данный момент сигнале отличается в каждом кадре и включает также преамбулу кадра T2.
Соответственно, если проверить параметры S1 и S2 в составе символа P1, принимаемого в некоторый момент времени, принимаемый сигнал обязательно соответствует какой-либо одной из следующих схем:
A. Принимается кадр T2 (S1: T2, S2: несмешанный);
B. Принимается кадр T2 из состава мультиплексированного сигнала, содержащего кадры T2 и FEF-сегменты (S1: T2, S2: смешанный);
C. Принимается что-то другое, отличное от кадра T2 (S1: he T2, S2: несмешанный); и
D. Принимается FEF-сегмент из состава мультиплексированного сигнала, содержащего кадры T2 и FEF-сегменты (S1: he T2, S2: смешанный).
Короче говоря, проверка параметров S1 и S2 в составе символа P1 позволяет различить кадр T2 и FEF-сегмент (T2/FEF).
Пример конфигурации приемного устройства
Фиг.6 представляет блок-схему, показывающую пример конфигурации известного приемного устройства.
На фиг.6 показано приемное устройство 1, которое включает восстановитель 11 дискретизированного сигнала, корректор 12 частоты несущей, блок 13 обработки символа P1, блок 14 вычисления корреляции интервала GI, блок 15 вычисления преобразования FFT, блок 16 точного определения погрешности, блок 17 грубого определения погрешности, блок 18 определения ошибки дискретизации, блок 19 управления коррекцией, еще один блок 20 управления коррекцией, блок 21 обработки компенсации, блок 22 коррекции погрешности и блок 23 обработки символа P2.
В блок ортогонального демодулятора (не показан) приемного устройства 1 поступает сигнал промежуточной частоты (ПЧ), полученный в результате преобразования OFDM-сигнала, переданного от передающего устройства. Ортогональный демодулятор использует несущую с заданной частотой, т.е. с частотой несущей, в идеале это та же самая несущая, которую использовало передающее устройство, а также сигнал, ортогональный относительно несущей, для цифровой ортогональной демодуляции поступающего на вход OFDM-сигнала. Ортогональный демодулятор передает на выход OFDM-сигнал основной полосы частот, полученный посредством цифровой ортогональной демодуляции, в качестве результата демодуляции.
Сигнал, выводимый в качестве результата демодуляции, представляет собой сигнал во временной области перед вычислением преобразования FFT в блоке 15 вычисления преобразования FFT, описанном ниже, т.е. сигнал во временной области непосредственно после вычисления символа, представляющего собой данные, переданные на одной поднесущей, в виде IQ-созвездия, посредством преобразования IFFT на передающей стороне.
OFDM-сигнал во временной области, передаваемый на выход в качестве результата демодуляции, поступает в аналого-цифровой преобразователь (не показан) для превращения в цифровой сигнал, передаваемый далее в восстановитель 11 дискретизированного сигнала. Этот OFDM-сигнал во временной области является комплексным сигналом, представленным комплексным числом, включающим составляющую вдоль действительной оси (действительную составляющую), а именно, синфазную I-составляющую, и составляющую вдоль мнимой оси (мнимую составляющую), а именно, квадратурную Q-составляющую. Поэтому, схемные блоки, куда поступает комплексный сигнал после восстановителя 11 дискретизированного сигнала, обозначены двумя стрелками. Восстановитель 11 дискретизированного сигнала точно подстраивает результат демодуляции в виде цифрового сигнала таким образом, чтобы синхронизировать частоту дискретизации с тактовым сигналом передающего устройства.
Корректор 12 частоты несущей осуществляет коррекцию частоты несущей выходного сигнала восстановителя 11 дискретизированного сигнала. Выходной сигнал корректора 12 частоты несущей поступает в блок 13 обработки символа P1, блок 14 вычисления корреляции интервала GI и блок 15 вычисления преобразования FFT.
Блок 13 обработки символа P1 представляет собой функциональный блок, получающий с выхода корректора 12 частоты несущей сигнал, соответствующий OFDM-символу P1, и определяющий позицию запуска, точный сдвиг и грубый сдвиг, а также другие параметры. Далее, блок 13 обработки символа P1 может определить, является ли принимаемый в данный момент сигнал кадром T2. Сигнал, представляющий найденный сигнал запуска, передают в блок 15 вычисления преобразования FFT, а найденную величину точного сдвига, именуемую также значением точного определения, и найденную величину грубого сдвига, именуемую также значением грубого определения, передают в блок 19 управления коррекцией.
Здесь точный сдвиг представляет собой сдвиг в пределах интервала поднесущей OFDM, который точен, а грубый сдвиг представляет собой сдвиг, равный интервалу поднесущей OFDM, который груб. В частности, корректирующая поправка с точным сдвигом «точнее» поправки с грубым сдвигом, а корректирующая поправка с грубым сдвигом «грубее», поправки с точным сдвигом.
Блок 14 вычисления корреляции интервала GI получает защитные интервалы (GI) из выходного сигнала корректора 12 частоты несущей и использует корреляцию защитных интервалов для определения позиции запуска и точного сдвига. Сигнал, представляющий позицию запуска, передают в блок 15 вычисления преобразования FFT, а значение точного определения передают в блок 19 управления коррекцией.
Блок 15 вычисления преобразования FFT представляет собой функциональный блок, вычисляющий преобразование FFT для OFDM-символов на основе сигналов, представляющих позицию запуска и поступающих от блока 13 обработки символа P1 и блока 14 вычисления корреляции интервала GI. Блок 15 вычисления преобразования FFT извлекает значения отсчетов OFDM-сигнала во временной области, соответствующих размерности преобразования FFT, из OFDM-сигнала временной области в соответствии с позициями запуска и вычисляет преобразование FFT.
В последующем из этих символов, составляющих один OFDM-символ, входящий в состав OFDM-сигнала временной области, удаляют символы защитных интервалов и извлекают символы, имеющие эффективную длину символов, в качестве OFDM-сигнала временной области на интервале преобразования FFT и используют для вычисления преобразования FFT.
В результате вычисления преобразования FFT для OFDM-сигнала временной области посредством блока 15 вычисления преобразования FFT получают информацию, передаваемую на поднесущей, т.е. OFDM-сигнал, представляющий символы в IQ-созвездия.
Следует отметить, что OFDM-сигнал, получаемый в результате вычисления преобразования FFT для OFDM-сигнала временной области, представляет собой сигнал частотной области и потому будет далее именоваться OFDM-сигналом частотной области.
Результат вычислений в блоке 15 вычисления преобразования FFT поступает в процессор 21 коррекции, детектор 16 точной погрешности, детектор 17 грубой погрешности и детектор 18 погрешности дискретизации.
Детектор 16 точной погрешности использует разность фаз между символами OFDM пилот-сигналов из состава OFDM-сигнала частотной области, получаемого в результате вычисления преобразования FFT, для того, чтобы вновь измерить величину точного сдвига, и выводит значение точного определения в блок 19 управления коррекцией.
Детектор 17 грубой погрешности использует тот факт, что известна схема модуляции OFDM пилот-сигналов в составе OFDM-сигнала частотной области, полученного посредством вычисления преобразования FFT, для того чтобы вновь измерить величину грубого сдвига, и передает значение грубого определения в блок 19 управления коррекцией.
Следует отметить, что значение точного определения, определяемое блоком 13 обработки символа P1, будет далее именоваться значением точного определения P1, a значение грубого определения, определяемое блоком 13 обработки символа P1, будет далее именоваться значением грубого определения P1. Значение точного определения, определяемое блоком 14 вычисления корреляции интервала GI, будет далее именоваться значением точного определения GI. Кроме того, значение точного определения, определяемое детектором 16 точной погрешности, будет далее именоваться значением точного определения пилот-сигнала, а значение грубого определения, определяемое детектором 17 грубой погрешности, будет далее именоваться значением грубого определения пилот-сигнала.
Детектор 18 погрешности дискретизации определяет погрешность дискретизации на основе OFDM-сигнала частотной области, получаемого посредством вычисления преобразования FFT, и передает значение определения погрешности в блок 20 управления коррекцией.
Блок 19 управления коррекцией осуществляет коррекцию погрешности точного определения P1 от блока 13 обработки символа P1 на основе значения точного определения GI от блока 14 вычисления корреляции интервала GI и значения точного определения пилот-сигнала от детектора 16 точной погрешности. Кроме того, блок 19 управления коррекцией осуществляет коррекцию погрешности значения грубого определения P1 от блока 13 обработки символа P1 на основе значения грубого определения пилот-сигнала от детектора 17 грубой погрешности. Затем блок 19 управления коррекцией генерирует корректирующую поправку частоты несущей путем коррекции на определенные значения и передает эту корректирующую поправку частоты несущей в корректор 12 частоты несущей.
Блок 20 управления коррекцией управляет работой восстановителя 11 дискретизированного сигнала на основе измеренной величины погрешности дискретизации от детектора 18 погрешности дискретизации.
Блок 21 обработки компенсации осуществляет компенсацию в соответствии с характеристикой канала передачи на основе пилотных символов, включенных в состав OFDM-символов в OFDM-сигнале частотной области. Например, блок 21 обработки компенсации может осуществлять компенсацию переданного ему сигнала путем выполнения комплексного деления сигнала после вычисления преобразования FFT на оценку характеристики линии передачи. Сигнал, скомпенсированный в блоке 21 обработки компенсации, передают в блок 22 коррекции погрешности.
Блок 22 коррекции погрешности выполняет процесс деперемежения для сигнала, подвергнутого перемежению на передающей стороне, и передает результирующий сигнал в блок 23 обработки символов P2 и в схему последующего каскада.
Блок 23 обработки символов P2 получает сигнал, соответствующий OFDM-символу P2 и осуществляет декодирование пред-сигналов L1 и пост-сигналов L1. Информацию о пред-сигналах L1 и пост-сигналах L1, полученную посредством декодирования, используют для демодуляции символов данных и т.д.
Сущность изобретения
Когда приемное устройство начинает демодуляцию, а символ P1 указывает «Смешанный», принимаемый сигнал содержит переданные поочередно один FEF-сегмент и n кадров T2. Хотя приемное устройство должно игнорировать FEF-интервал, для этого необходимо каждый раз, когда происходит детектирование символа P1, в начале демодуляции принимать решение, является ли принимаемый в данный момент сигнал FEF-сегментом или нет. Хотя такое решение принимается на основе считывания информации параметра S1, включенного в состав символа P1, для того чтобы прочитать эту информацию параметра S1, нужно выполнить такие фиксированные процедуры, как описано выше, и затратить на это фиксированный промежуток времени.
В частности, в приемном устройстве детектирование символа P1, обозначающего начальную позицию кадра T2 или FEF-сегмента, может быть произведено на сравнительно ранней стадии. Однако поскольку для принятия решения о том, является ли кадр, следующий за символом P1, кадром T2 или FEF-сегментом, после детектирования символа P1 требуется фиксированный промежуток времени, состояние неизвестности, является ли последующий кадр кадром T2 или FEF-сегментом, продолжается некоторое время. В течение этого периода времени запрещено выполнение различных операций, которые должно осуществить приемное устройство.
Например, в приемном устройстве 1 измеренные значения, полученные посредством блока 14 вычисления корреляции GI, детектора 16 точной погрешности, детектора 17 грубой погрешности, детектора 18 погрешности дискретизации и т.п., направляют по цепям обратной связи в блок 19 управления коррекцией и блок 20 управления коррекцией для осуществления коррекции.
Однако если коррекцию по обратной связи осуществлять, когда вводится сигнал, не являющийся кадром T2, который представляет собой нормальный OFDM-сигнал, например, FEF-сегмент, то последующие входные сигналы также принимаются не как нормальные сигналы, и контур обратной связи дает сбой, что приводит к появлению вероятности, что последующая демодуляция может стать затруднительной.
Кроме того, процессы коррекции частоты несущей и коррекции частоты дискретизации с использованием измеренных значений, полученных посредством блока 14 вычисления корреляции интервала GI, детектора 16 точной погрешности, детектора 17 грубой погрешности, детектора 18 погрешности дискретизации и т.п., опираются на предположение, что на вход поступает кадр T2, т.е. нормальный OFDM-сигнал. Соответственно, если невозможно различить, является ли принимаемый в данный момент сигнал кадром T2 или FEF-сегментом, тогда реально оказывается затруднительным осуществить такую коррекцию, как описано выше.
Продолжительность периода времени, необходимого для завершения принятия решения о конкретном характере принимаемого сигнала - T2 или FEF, т.е. периода времени между моментами получения параметров S1 и S2, зависит от способа выполнения схем и диапазона, в пределах которого осуществляется грубая коррекция частоты несущей с использованием символа P1. Например, если способ выполнения схем использует схемы небольшого размера или диапазон, в котором осуществляется грубая коррекция частоты несущей, выбран широким, для завершения принятия решения о конкретном характере принимаемого сигнала - T2 или FEF, требуется продолжительное время.
В этом случае, даже если нужно осуществить коррекцию с использованием пилот-сигнал более, чем из одного символа P2, присутствующих в начале кадра T2, имеется вероятность, что часть этого символа P2 может уже пройти к моменту, когда завершится процесс принятия решения о конкретном характере принимаемого сигнала - T2 или FEF. Это делает коррекцию невозможной. Другими словами, когда время, необходимое для принятия решения о конкретном характере принимаемого сигнала - T2 или FEF, велико, трудно осуществить процесс с использованием символов P2, а в результате затруднительно нормально декодировать данные, включенные в кадр T2.
Таким образом, желательно обеспечить приемное устройство, способ приема и приемную систему, способные реализовать стабильность и помехоустойчивость уже в начале процедуры приема, даже если нужно принять сигнал, включающий сигнал, отличный от кадра T2.
Согласно первому варианту настоящего изобретения предложено приемное устройство, включающее первое средство получения для приема сигнала, включающего первый сигнал и/или второй сигнал, имеющие отличающиеся друг от друга структуры за исключением того, что первый и второй сигналы имеют сигнал преамбулы, и для получения сигнала преамбулы из принимаемого сигнала, средство детектирования для определения значения коррекции указанного сигнала на основе указанного сигнала и средство коррекции для коррекции указанного сигнала с использованием значения, определенного средством детектирования, если на основе сигнала преамбулы, полученного первым средством приема, определено, что указанный сигнал является первым сигналом.
Средство коррекции может отвергнуть величину, определенную средством детектирования, если на основе сигнала преамбулы, полученного первым средством приема, определено, что указанный сигнал не является первым сигналом.
Средство коррекции, если определено, что сигнал представляет собой первый сигнал, может скорректировать этот сигнал с использованием значения, определенного средством детектирования, до получения следующего сигнала преамбулы первым средством получения, а если определено решение, что принимаемый сигнал не является первым сигналом, отвергнуть значение, определенное средством детектирования получения следующего сигнала преамбулы первым средством получения.
Приемное устройство может дополнительно включать в себя второе средство получения для получения, когда сигнал представляет собой первый сигнал, другого сигнала преамбулы, следующей за сигналом преамбулы рассматриваемого сигнала, и блок запрета обработки для запрета процесса определения средства детектирования на основе информации о втором сигнале, включенной в другой сигнал преамбулы, получаемый вторым средством получения.
Указанная информация о втором сигнале может представлять собой длину интервала или расстояние между интервалами второго сигнала в принимаемом сигнале.
Средство детектирования может определить точную величину смещения несущей на основе корреляции защитного интервала, включенного в принимаемый сигнал, точную величину смещения несущей на основе пилот-сигнала, включенного в принимаемый сигнал, или грубую величину смещения несущей или также величину погрешности дискретизации в качестве значения для коррекции сигнала.
Согласно первому варианту осуществления предложен также способ приема, включающий этапы приема сигнала, включающего первый сигнал и/или второй сигнал, обладающие отличающимися друг от друга структурами за исключением того, что и первый и второй сигналы имеют сигнал преамбулы, и получения сигнала преамбулы из принимаемого сигнала, определения значения коррекции принимаемого сигнала с использованием принимаемого сигнала и коррекции принимаемого сигнала с использованием определенного значения, если на основе полученного сигнала преамбулы определено, что принимаемый сигнал представляет собой первый сигнал.
Согласно второму варианту осуществления настоящего изобретения предложена приемная система, включающая блок получения для получения сигнала из линии передачи и блок обработки декодирования линии передачи, выполненного с возможностью выполнения декодирования линии передачи, включающего в себя по меньшей мере демодуляцию сигнала, полученного по линии передачи, при этом сигнал, полученный по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающиеся друг от друга структуры, за исключением того, что первый и второй сигналы имеют сигнал преамбулы, причем блок обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из принимаемого сигнала, средство детектирования для определения значения коррекции принимаемого сигнала на основе принимаемого сигнала и средство коррекции для коррекции принимаемого сигнала с использованием значения, определенного средством детектирования, если на основе сигнала преамбулы, полученного средством получения, определено, что принимаемый сигнал представляет собой первый сигнал.
Согласно третьему варианту осуществления настоящего изобретения предложена приемная система, включающая в себя блок декодирования линии передачи, выполненный с возможностью выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, полученного по линии передачи, и блок обработки декодирования источника информации, выполненный с возможностью выполнения процесса декодирования источника информации, включающего в себя по меньшей мере процесс раскрытия сжатой информации в исходную информацию для сигнала, для которого выполняется процесс декодирования линии передачи, причем сигнал, получаемый по линии передачи, включает в себя по меньшей мере первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру за исключением того, что первый и второй сигналы имеют сигнал преамбулы, при этом блок обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из принимаемого сигнала, средство детектирования для определения значения коррекции принимаемого сигнала на основе принимаемого сигнала и средство получения для выполнения коррекции принимаемого сигнала с использованием значения определенного средством детектирования, если на основе сигнала преамбулы, полученного средством получения, определено, что принимаемый сигнал представляет собой первый сигнал.
Согласно четвертому варианту осуществления настоящего изобретения предложена приемная система, включающая блок обработки декодирования линии передачи, выполненный с возможностью выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, полученного по линии передачи, и выходной блок, выполненный с возможностью вывода изображения или звука на основе сигнала, для которого выполняется процесс декодирования линии передачи, при этом сигнал, получаемый по линии передачи, включает в себя по меньшей мере первый сигнал и/или второй сигнал, имеющий отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы, причем блок декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из принимаемого сигнала, средство детектирования для определения значения коррекции принимаемого сигнала на основе принимаемого сигнала и средство коррекции для коррекции принимаемого сигнала с использованием значения, определенного средством детектирования, если на основе сигнала преамбулы, полученного средством получения, определено, что принимаемый сигнал представляет собой первый сигнал.
Согласно пятому варианту осуществления настоящего изобретения предложена приемная система, включающая блок обработки декодирования линии передачи, выполненный с возможностью осуществления процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, полученного по линии передачи, и блок записи, выполненный с возможностью записи сигнала, для которого выполняется процесс декодирования линии передачи, при этом сигнал, получаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличную друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы, причем блок декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из принимаемого сигнала, средство детектирования для определения значения коррекции принимаемого сигнала на основе принимаемого сигнала и средство коррекции для коррекции принимаемого сигнала с использованием значения, определенного средством детектирования, детектором, если на основе сигнала преамбулы, полученного средством получения, определено, что принимаемый сигнал представляет собой первый сигнал.
В приемном устройстве и способе приема согласно первому варианту осуществления и в приемных системах согласно вариантам со второго по пятый настоящего изобретения принимается сигнал, включающий в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы. Затем получают сигнал преамбулы из принимаемого сигнала и определяют значение коррекции принимаемого сигнала с использованием принимаемого сигнала. Далее, корректируют принимаемый сигнал с использованием определенного значения, если на основе сигнала преамбулы определено, что принимаемый сигнал представляет собой первый сигнал.
При использовании указанных приемного устройства и способа, а также указанных приемных систем в случае приема сигнала, включающего в себя сигнал, отличный от кадра T2, тоже удается добиться повышения стабильности и помехоустойчивости после начала приема сигнала.
Краткое описание чертежей
Фиг.1 представляет диаграмму, иллюстрирующую конфигурацию кадра в стандарте DVB-T2;
фиг.2 представляет диаграмму, иллюстрирующую формат кадра T2;
фиг.3 представляет диаграмму, иллюстрирующую формат FEF-сегмента;
фиг.4 представляет диаграмму, иллюстрирующую конфигурацию символа P1;
фиг.5A и 5B представляет изображения, иллюстрирующие параметры S1 и S2, включенные в символ P1;
фиг.6 представляет блок-схему, показывающую пример конфигурации известного приемного устройства;
фиг.7 представляет блок-схему, показывающую пример конфигурации приемного устройства, к которому применены варианты настоящего изобретения;
фиг.8 представляет блок-схему, показывающую конфигурацию блока обработки символа P1, показанного на фиг.7;
фиг.9 представляет блок-схему, показывающую конфигурацию блока вычисления значения корреляции, показанного на фиг.8;
фиг.10 и 11 представляют временные диаграммы, иллюстрирующие различные примеры сигналов, получаемых в нескольких компонентах блока вычисления значения корреляции, показанного на фиг.9;
фиг.12 представляет диаграмму, иллюстрирующую мощность OFDM-сигнала в составе символа P1;
фиг.13 и 14 представляют блок-схемы, иллюстрирующие процесс при первоначальном сканировании;
фиг.15 представляет блок-схему, иллюстрирующую процесс в блоке различения кадра T2/FEF-сегмента при первоначальном сканировании;
фиг.16 представляет блок-схему, иллюстрирующую процесс управления коррекцией в блоке управления коррекцией;
фиг.17 представляет диаграмму, иллюстрирующую промежуток времени до момента получения результата определения относительно T2/FEF;
фиг.18 представляет диаграмму, иллюстрирующую момент применения определенного значения;
фиг.19 представляет временную диаграмму, иллюстрирующую моменты определения погрешности и применения найденного значения;
фиг.20, 21 и 22 представляют блок-схемы, показывающие примеры конфигурации приемных систем согласно соответственно первому, второму и третьему вариантам настоящего изобретения; и
фиг.23 представляет блок-схему, показывающую пример конфигурации аппаратного обеспечения компьютера.
Подробное описание предпочтительных вариантов
Пример конфигурации приемного устройства
На фиг.7 показан пример конфигурации приемного устройства 51, в котором применены варианты настоящего изобретения. В конфигурации, изображенной на фиг.7, компоненты, соответствующие конфигурации приемного устройства 1, представленного на фиг.6, имеют такие же позиционные обозначения, а совпадающие описания опущены.
Как показано на фиг 7, приемное устройство 51 включает в себя восстановитель 11 дискретизированного сигнала, блок 12 коррекции частоты несущей, блок 14 вычисления корреляции интервала GI, блок 15 вычисления преобразования FFT, детектор 16 точной погрешности, детектор 17 грубой погрешности, детектор 18 погрешности дискретизации, блок 21 обработки компенсации, блок 22 коррекции погрешностей и блок 23 обработки символа P2, аналогичные соответствующим компонентам приемного устройства 1, описанного выше со ссылками на фиг.6.
Приемное устройство 51 на фиг.7 отличается от приемного устройства 1 на фиг.6 тем, что оно включает в себя блок 61 обработки символа P1, блок 62 управления коррекцией и второй блок 63 управления коррекцией соответственно вместо блока 13 обработки символа P1, блока 19 управления коррекцией и блока 20 управления коррекцией, а также дополнительно включает блок 64 генерирования флага.
Блок 61 обработки символа P1 использует параметры S1 и S2, включенные в состав символа P1, чтобы решить, является ли сигнал, принимаемый в данный момент, кадром T2 или кадром FEF (кадр перспективного расширения). Затем блок 61 обработки символа P1 выводит сигнал, представляющий результат определения T2/FEF, блоку 62 управления коррекцией и блоку 63 управления коррекцией.
На входы блока 62 управления коррекцией в качестве значений, используемых при коррекции, подаются значение точного определения P1 и значение грубого определения P1 от блока 13 обработки символа P1, значение точного определения GI от блока 14 вычисления корреляции GI, значение точного определения пилот-сигнала от детектора 16 точной погрешности и значение грубого определения пилот-сигнала от детектора 17 грубой погрешности.
Блок 62 управления коррекцией сразу же применяет значение точного определения P1 и значение грубого определения P1 от блока 13 обработки символа P1 из поступивших в него значений определения. С другой стороны, блок 62 управления коррекцией сначала сохраняет остальные поступившие на его входы значения определения и применяет их только тогда, когда результат определения T2/FEF от блока 61 обработки символа P1 укажет кадр T2. Однако если результат определения T2/FEF не укажет на кадр T2, эти значения определения отбрасываются.
В частности, блок 62 управления коррекцией генерирует значение коррекции частоты несущей, подлежащие использованию для коррекции погрешности частоты несущей на основе значения точного определения P1 и значения грубого определения P1 от блока 13 обработки символа P1, обозначенных сплошными линиями, среди совокупности значений определения, поступивших в блок 62. Затем блок 62 управления коррекцией выводит сгенерированное им значение коррекции частоты несущей в блок 12 коррекции частоты несущей.
Напротив, даже при поступлении значения точного определения GI от блока 14 вычисления корреляции GI, значения точного определения пилот-сигнала от детектора 16 точной погрешности и значение грубого определения пилот-сигнала от детектора 17 грубой погрешности, показанные штриховыми линиями с чередующимися короткими и длинными штрихами, блок 62 управления коррекцией сохраняет эти сигналы. Затем, если от блока 61 обработки символа P1 поступает сигнал, представляющий результат определения T2/FEF, блок 62 управления коррекцией реализует определение T2/FEF. Затем, если результат определения T2/FEF указывает кадр T2, блок 62 управления коррекцией использует также значение точного определения GI, значение точного определения пилот-сигнала, значение грубого определения пилот-сигнала и т.п., сохраненные в нем, для генерирования значения коррекции частоты несущей. С другой стороны, если результат определения T2/FEF не указывает кадр T2, блок 62 управления коррекцией не использует сохраненные в нем значение точного определения GI, значение точного определения пилот-сигнала и значение грубого определения пилот-сигнала, но отбрасывает их. Выполнение описанных здесь операций продолжается, пока не будет обнаружен следующий символ P1.
На блок 63 управления коррекцией подают значение определения погрешности от детектора 18 погрешности дискретизации в качестве величины, используемой для коррекции.
Кроме того, блок 63 управления коррекцией сохраняет значение определения погрешности, обозначенное штриховой линией с чередующимися короткими и длинными штрихами. При поступлении сигнала, представляющего результат определения T2/FEF, от блока 61 обработки символа P1, как показано жирной линией, блок 63 управления коррекцией реализует это определение T2/FEF. Только если сигнал результата определения T2/FEF от блока 61 обработки символа P1 указывает кадр T2, блок 63 управления коррекцией применяет сохраненное в нем значение определения погрешности для генерирования значения коррекции погрешности дискретизации. С другой стороны, если результат определения T2/FEF не указывает кадр T2, блок 63 управления коррекцией не использует сохраненное в нем значение определения погрешности для генерирования значения коррекции погрешности дискретизации, но отбрасывает это значение. Выполнение описанных здесь операций продолжается, пока не будет обнаружен следующий символ P1.
Следует отметить, что на фиг.7 штриховой линией, показывающей входной сигнал для блока, обозначен сигнал флага, представляющего включение или выключение блока, для управления этим блоком и переводом его в рабочее или нерабочее состояние, и каждый блок принимает сигнал флага от предшествующего каскада вместе с синфазной (I) составляющей и квадратурной (Q) составляющей OFDM-сигнала временной области и выводит этот сигнал флага вместе с указанными I и Q составляющими следующему каскаду. Поскольку сигналы, вводимые с предшествующего каскада, не показаны, каждым из компонентов приемного устройства 51 управляют в зависимости от того, какой из поступивших на вход сигналов следует обработать.
Блок 64 генерирования флага помещен между блоком 12 коррекции частоты несущей и блоком 15 вычисления преобразования FFT, и если он не принимает какой-либо входной сигнал от блока 23 обработки символов P2, он передает на выход сигнал флага, представляющий включение или выключение, от предшествующего каскада без изменений этого флага («как он есть») последующему каскаду вместе с OFDM-сигналом временной области. Если от блока 23 обработки символов P2 поступили значения интервала между FEF-сегментами и длины такого FEF-сегмента, блок 64 генерирования флага определяет, что поступивший OFDM-сигнал временной области является Смешанным и определяет, какой участок этого сигнала является FEF-сегментом. Если сигнал находится в пределах FEF-сегмента, блок 64 генерирования флага генерирует флаг, представляющий отключение, и выводит сигнал сгенерированного флага блокам последующего каскада вместе с OFDM-сигналом временной области.
Соответственно, когда блок 64 генерирования флага выводит сигнал отключения блокам последующего каскада, значения определения, поступающие от блоков последующего каскада в генератор 64 флага, не поступают в блоки 62 и 63 управления коррекцией. Другими словами, в этом случае блоки 62 и 63 управления коррекцией не осуществляют обработку сигналов с использованием значений определения от блоков, следующих за генератором 64 флага.
Блок 23 обработки символов P2, показанный на фиг.7, получает сигнал, соответствующий OFDM-символу P2 и декодирует пред-сигналы L1 и пост-сигналы L1. Затем блок 23 обработки символов P2 выводит величины интервала между FEF-сегментами и длины FEF-сегмента, полученные в результате декодирования пред-сигналов L1, в блок 64 генерирования флага.
Пример конфигурации блока обработки символа P1
На фиг.8 показан пример конфигурации блока обработки символа P1.
Блок 61 обработки символа P1 включает в себя блок 71 детектирования символа P1, блок 72 задержки, блок 73 коррекции частоты, блок 74 вычисления преобразования FFT, блок 75 вычисления корреляции CDS (последовательности распределения несущих), блок 76 декодирования и блок 77 управления. Блок 71 детектирования символа P1 включает в себя блок 71A вычисления значения корреляции, а декодер 76 включает блок 81 обработки грубой коррекции/дескремблирования, блок 82 демодулирования сигналов с дифференциальной двухуровневой фазовой манипуляцией (DBPSK), блок 83 декодирования параметра S1 и блок 84 декодирования параметра S2. Блок 77 управления включает блок 77A различения кадров T2/FEF.
OFDM-сигнал от блока 12 коррекции частоты несущей поступает в качестве входного сигнала в блок 71 детектирования символа P1 и в блок 72 задержки. Этот входной сигнал представляет собой комплексный сигнал, включающий действительную составляющую, а именно, синфазную (I) составляющую, и мнимую составляющую, а именно, квадратурную (Q) составляющую. Этот входной сигнал представляет собой OFDM-сигнал перед вычислением преобразования FFT.
Блок 71A вычисления значения корреляции в блок 71 детектирования символа P1 вычисляет значение корреляции для каждого интервала входного сигнала, чтобы определить символ P1. Подробности вычисления значения корреляции, осуществляемого в блоке 71A вычисления значения корреляции будут в дальнейшем описаны со ссылками на фиг.9.
Если детектирование символа P1 осуществляется на основе значения корреляции для каждого интервала, блок 71 детектирования символа P1 устанавливает начальную точку для вычисления преобразования FFT относительно позиции символа P1 и выводит сигнал, представляющий эту установленную позицию, т.е. позицию запуска, в блок 74 вычисления преобразования FFT. Сигнал, представляющий позицию запуска, передают также в блок 15 вычисления преобразования FFT, показанный на фиг.7.
Далее, блок 71 детектирования символа P1 определяет погрешность частоты в пределах интервала несущей, а именно, точный сдвиг частоты несущей, и выводит определенное значение точного определения символа P1, являющегося информацией, представляющей погрешность частоты, в блок 73 коррекции частоты. Согласно Руководству по реализации (Implementation Guidelines) стандартов DVB-T2 (ETSI TR 102 831: IG), символ P1 позволяет определить «точную» погрешность частоты с точностью ±0,5 × интервал поднесущих. Значение точного осуществления символа P1 выводится также в блок 62 управления коррекцией.
Блок 72 задержки осуществляет задержку OFDM-сигнала, подаваемого в него в качестве входного сигнала, на время, необходимое для определения символа P1 в блоке 71 определения символа P1 и т.п., и выводит задержанный OFDM-сигнал в блок 73 коррекции частоты.
Блок 73 коррекции частоты осуществляет коррекцию погрешности частоты OFDM-сигнала, подаваемого в него от блока 72 задержки, на основе значения точного определения символа P1, подаваемого в него от блока 71 детектирования символа P1, и выводит OFDM-сигнал после коррекции в блок 74 вычисления преобразования FFT.
Используя позицию запуска, установленную блоком 71 определения символа P1, в качестве начальной позиции, блок 74 вычисления преобразования FFT осуществляет вычисление преобразования FFT для OFDM-сигнала, поступающего от блока 73 коррекции частоты, т.е. символа, имеющего эффективную длину символа. В результате вычисления преобразования FFT получают OFDM-сигнал, представляющий данные, передаваемые н поднесущей, т.е. символ на IQ-созвездии. Этот OFDM-сигнал частотной области, получаемый в результате вычисления преобразования FFT, подается в блок 75 вычисления корреляции последовательности CDS.
Блок 75 вычисления корреляции последовательности CDS вычисляет значение корреляции между строкой поднесущих, передающих электрическую мощность OFDM-сигнала, поступающего в этот блок от блока 75 вычисления корреляции последовательности CDS, и известной строкой (CDS). В OFDM-сигнале частотной области, полученном в результате вычисления преобразования FFT для символа P1, поднесущие, имеющие электрическую мощность, распределены только по частотам, определяемым известной строкой. Подробнее эта известная строка будет описана позднее со ссылками на фиг.12.
Блок 75 вычисления корреляции последовательности CDS определяет символ P1 на основе вычисленного значения корреляции. Например, блок 75 вычисления корреляции последовательности CDS определяет интервал строки поднесущих, имеющих электрическую мощность, при которой величина корреляции с известной строкой достигает максимума, в качестве интервала для символа P1.
В последующем описании значение корреляции для каждого интервала OFDM-сигнала временной области, вычисленное блоком 71A вычисления значения корреляции в блоке 71 детектирования символа P1, будет именоваться значением корреляции интервала сигнала, а значение корреляции, вычисленная блоком 75 вычисления корреляции последовательности CDS, будет именоваться значением корреляции последовательности CDS. Далее, максимальное значение среди значений корреляции интервала сигнала будет именоваться пиковым значением корреляции интервала сигнала, а максимальное значение среди значений корреляции последовательности CDS будет именоваться пиковым значением корреляции последовательности CDS.
Кроме того, когда OFDM-сигнал, поступающий от блока 74 вычисления преобразования FFT, представляет собой сигнал символа P1, блок 75 вычисления корреляции последовательности CDS определяет погрешность частоты для каждой несущей, т.е. грубый сдвиг частоты несущей. Согласно Руководству по реализации (ETSI TR 102 831: IG) для стандартов DVB-T2, можно использовать корреляцию символа P1 с известной строкой, чтобы определить «грубую» погрешность частоты в единице интервала поднесущих.
Блок 75 вычисления корреляции последовательности CDS выводит OFDM-сигнал после вычисления преобразования FFT и значение грубой коррекции для символа P1, являющуюся информацией, представляющей измеренную погрешность частоты, в блок 81 обработки грубой коррекции/дескремблирования. Значение грубой коррекции для символа P1 выводят также в блок 62 управления коррекцией, показанный на фиг.7.
Блок 81 обработки грубой коррекции/дескремблирования корректирует погрешность частоты OFDM-сигнала, поступающего от блока 75 вычисления корреляции последовательности CDS, на основе значения грубой коррекции и выводит OFDM-сигнал, полученный в результате применения таких процессов, как дескремблирование, в блок 82 демодулирования DBPSK-сигналов.
Блок 82 демодулирования DBPSK-сигналов применяет DBPSK-демодуляцию к OFDM-сигналу, поступающему от блока 81 обработки грубой коррекции/дескремблирования. Блок 82 демодулирования DBPSK-сигналов выводит строку части параметра S1, включенного в состав символа P1, из строки сигнальных точек, полученных посредством DBPSK-демодуляции, в блок 83 декодирования параметра S1 и выводит строку части параметра S2 в блок 84 декодирования параметра S2. Здесь следует отметить, что битовая строка из 1 и 0, полученная в результате применения жесткого определения к результату DBPSK-демодуляции, может быть выведено из блока 82 демодулирования DBPSK-сигналов и использовано для декодирования параметров S1 и S2.
Блок 83 декодирования параметра S1 вычисляет значение корреляции между строкой сигнальных точек, поступающей от блока 82 демодулирования DBPSK-сигналов, и отдельными строками из восьми различных известных последовательностей, соответствующих параметру S1 из 3 битов согласно стандартам DVB-T2. Блок 83 декодирования параметра S1 выбирает величину из 3 битов, соответствующую той из восьми различных известных последовательностей, для которой определена максимальная величина корреляции, в качестве параметра S1 и выводит эту 3-битовую величину параметра S1.
Блок 84 декодирования параметра S2 вычисляет значение корреляции между строкой сигнальных точек, поступающей от блока 82 демодулирования DBPSK-сигналов, и индивидуальными последовательностями из 16 различных известных последовательностей, соответствующих параметру S2 из 4 битов согласно стандартам DVB-T2. Блок 84 декодирования параметра S2 выбирает величину из 4 битов, соответствующую той из 16 различных известных последовательностей, для которой определена максимальная величина корреляции, в качестве параметра S2 и выводит эту 4-битовую величину параметра S2.
Схемы последующих каскадов выполняют разнообразные процедуры на основе параметра S1 с выхода блока 83 декодирования параметра S1 и параметра S2 с выхода блока 84 декодирования параметра S2. Эти параметр S1 с выхода блока 83 декодирования параметра S1 и параметр S2 с выхода блока 84 декодирования параметра S2 поступают также в блок 77A различения кадров T2/FEF в составе блока 77 управления.
Блок 77 управления осуществляет управление работой всего приемного устройства 1, включая конфигурацию, показанную на фиг.8. Например, блок 77 управления осуществляет управление каналом, подлежащим приему. Блок 77A различения кадров T2/FEF в составе блока 77 управления использует параметр S1 с выхода блока 83 декодирования параметра S1 и параметр S2 с выхода блока 84 декодирования параметра S2 для определения, является ли сигнал, принимаемый в данный момент, кадром T2 или FEF-сегментом. Затем блок управления 77 выводит сигнал, представляющий результат такого определения T2/TFT, в блоки 62 и 63 управления коррекцией, показанные на фиг.7.
Пример конфигурации блока вычисления значения корреляции
Фиг.9 показывает конфигурацию блока 71A вычисления значения корреляции в составе блока 71 детектирования символа P1.
Более конкретно, фиг.9 показывает конфигурацию для определения значения корреляции синфазной (I) составляющей в рамках конфигурации блока 71A вычисления значения корреляции. Соответственно, конфигурация для определения значения корреляции квадратурной (Q) составляющей аналогична показанной на фиг.9.
Блок 71A вычисления значения корреляции включает в себя блок 91 сдвига частоты, блок 92 задержки, умножитель 93, блок 94 вычисления скользящего среднего, другой блок 95 задержки, еще один блок задержки 96, другой умножитель 97, другой блок 98 вычисления скользящего среднего и еще один умножитель 99. Эти блоки, составляющие блок 71A вычисления значения корреляции, осуществляют обработку, последовательно изменяя интервал объекта обработки для каждого заданного интервала входного OFDM-сигнала.
Блок 91 сдвига частоты умножает входной сигнал на сигнал е-j2πfSHt для осуществления преобразования частоты входного сигнала, которая в результате преобразования снижается на величину fSH. Когда интервал объекта обработки представляет собой интервал символа P1, частоты сигнала С и сигнала В на фиг.4 становятся равны частоте сигнала от источника копии. Как описано выше со ссылками на фиг.4, частота сигнала С, скопированного на отрезок перед эффективным символом, конфигурирующим символ P1, имеет частоту, увеличенную на величину частоты fSH относительно частоты сигнала от источника копии. В то же время, частота сигнала В, скопированного на отрезок после указанного эффективного символа, имеет частоту, уменьшенную на величину частоты fSH относительно частоты сигнала от источника копии.
Блок 91 сдвига частоты выводит входной сигнал после преобразования частоты в блок 92 задержки и в умножитель 97.
Блок 92 задержки осуществляет задержку входного сигнала, поступающего от блока 91 преобразования частоты, на время Тс, равное времени или длительности сигнала С в составе символа P1 и передает задержанный сигнал в умножитель 93.
Умножитель 93 осуществляет умножение входного сигнала s1 на сигнал s2, поступающий от блока 92 задержки, и выводит сигнал, представляющий результат умножения, в блок 94 вычисления скользящего среднего.
Блок 94 вычисления скользящего среднего определяет значение скользящего среднего для результата умножения с выхода умножителя 93 и выводит сигнал, представляющий найденное значение скользящего среднего, в качестве сигнала s4, представляющего величину корреляции, в блок 95 задержки.
Блок 95 задержки осуществляет задержку сигнала s4, поступающего от блока 94 вычисления скользящего среднего, так что сигнал s6 с выхода блока 95 задержки может быть подан на вход умножителя 99 одновременно с сигналом s5 с выхода блока 98 вычисления скользящего среднего. Блок задержки 95 передает сигнал s6 после задержки на вход умножителя 99.
Блок 96 задержки осуществляет задержку входного сигнала на время Tb, равное времени сигнала B в составе символа P1 и выводит задержанный сигнал s3 в умножитель 97.
Умножитель 97 осуществляет умножение сигнала, поступающего от блока 91 сдвига частоты, на сигнал s3, поступающий от блока 96 задержки, и выводит сигнал, представляющий результат умножения, в блок 98 вычисления скользящего среднего.
Блок 98 вычисления скользящего среднего определяет значение скользящего среднего для результата умножения, выполняемого умножителем 97, и выводит сигнал, представляющий найденное значение скользящего среднего, в качестве сигнала s5, представляющего величину корреляции, в умножитель 99.
Умножитель 99 осуществляет умножение сигнала s6, поступающего от блока 95 задержки, на сигнал s5, поступающий от блока 98 вычисления скользящего среднего, и выводит сигнал s7, представляющий результат умножения. На основе сигнала, выведенного из умножителя 99, остальная часть конфигурации (не показана) блока 71 детектирования символа P1 определяет пиковое значение корреляции интервала сигнала, представляющую собой пиковое значение для значения корреляции, позицию запуска преобразования FFT и значение такой корреляции символа P1 и передает эти значения в соответствующие блоки.
Фиг.10 иллюстрирует пример сигналов, получаемых блоками, показанными на фиг.9.
Сигнал s1, изображенный на верхней линейке фиг.10, представляет собой сигнал символа P1, поступающий в качестве входного сигнала в блок 71A вычисления значения корреляции, показанный на фиг.9. При поступлении сигнала s1, начало которого располагается в начальной точке сигнала С, с выхода блока 92 задержки выводят сигнал s2, показанный на второй линейке. Кроме того, с выхода блока 96 задержки выводят сигнал s3, изображенный на третьей линейке. Сигнал s2 представляет собой сигнал, получаемый путем задержки входного сигнала s1 на время Tc, а сигнал s3 представляет собой сигнал, получаемый путем задержки входного сигнала s1 на время Tb.
Умножитель 93 вычисляет произведение сигнала s1, изображенного на верхней линейке, и сигнала s2, показанного на второй линейке, а блок 94 вычисления скользящего среднего вычисляет величину скользящего среднего для результатов этого умножения. В результате получают сигнал s4, форма которого показана под сигналом s3.
Как видно на фиг.10, форма сигнала s4 такова, что сигнал увеличивается на интервале Tc, считая от начальной точки эффективного символа А входного сигнала, являющейся конечной точкой сигнала C, затем сохраняет фиксированную величину на интервале Tr-Tc и далее уменьшается также на интервале Tc. Здесь Tr - длина эффективного символа A, как видно на правой стороне фиг.11.
Кроме того, умножитель 97 осуществляет умножение сигнала s1, изображенного на самой верхней линейке, на сигнал s3, показанный на третьей линейке, а блок 98 вычисления скользящего среднего вычисляет величину скользящего среднего для результатов умножения. В итоге получают сигнал s5, форма которого показана под сигналом s4.
Форма сигнала s5 такова, что сигнал увеличивается на интервале Tb, считая от конечной точки эффективного символа А входного сигнала, являющейся начальной точкой сигнала B, затем сохраняет фиксированную величину на интервале Tr-Tb и далее уменьшается также на интервале Tb.
Фиг.11 иллюстрирует сигнал, представляющий значение корреляции между входным сигналом и задержанным входным сигналом, задержанным на время Tc, и другой сигнал, представляющий значение корреляции между входным сигналом и задержанным входным сигналом, задержанным на время Tb. Кроме того, фиг.11 иллюстрирует сигнал, представляющий величину корреляции, т.е. величину корреляции интервала сигнала, найденную посредством перемножения этих двух сигналов.
В результате задержки сигнала s4, показанного на фиг.10, на время Ta в блоке 95 задержки получают сигнал s6, показанный в верхней части фиг.11. Умножитель 99 осуществляет умножение сигнала s6 на сигнал s5, и в результате получают сигнал s7, показанный внизу. Здесь следует отметить, что на фиг.11 величина K составляет 30 отсчетов, а разница между длительностью Tc сигнала C и длительностью Tb сигнала В представлена величиной 2K.
В частности, в блоке 71 детектирования символа P1 на фиг.8 определяемую блоком 71A вычисления значения корреляции позицию, в которой обнаруживается найденное пиковое значение корреляции интервала сигнала на основе показанного на фиг.11 сигнала s7, устанавливают в качестве начала кадра T2.
Фиг.12 иллюстрирует электрическую мощность OFDM-сигнала для символа P1.
На фиг.12 ось абсцисс представляет индекс несущей в качестве меры частоты, а на оси ординат представлена электрическая мощность поднесущих. Среди направленных вверх стрелок, обозначающих поднесущие, относительно длинные стрелки обозначают поднесущие, имеющие электрическую мощность и передающие назначенные им данные, а относительно короткие стрелки обозначают поднесущие, не имеющие электрической мощности и назначенных им данных для передачи, т.е. неиспользуемые несущие.
Как видно на фиг.12, OFDM-сигнал символа P1 имеет 853 поднесущих в качестве эффективных поднесущих, а согласно стандартам DVB-T2 данные наложены на 384 поднесущих из этих 853 поднесущих.
Блок 75 вычисления корреляции последовательности CDS использует такую известную строку, как только что описанная, для вычисления значений корреляции последовательности CDS и определяет интервал поднесущей, которой соответствует максимальное значение корреляции с известной строкой и которая имеет электрическую мощность, в качестве интервала символа P1.
Блок 82 демодуляции DBPSK-сигналов осуществляет демодуляцию OFDM-сигнала, поступающего от блока 81 обработки грубой коррекции/дескремблирования, с целью получения строки сигнальных точек и затем выводит строку с частью параметра S1, включенного в состав символа P1, из состава этой строки сигнальных точек в блок 83 декодирования параметра S1, а также выводит строку с частью параметра S2 в блок 84 декодирования параметра S2. Следует отметить, что из демодулятора 82 DBPSK-сигнала может быть выведена битовая строка, составленная из 1 и 0 и полученная в результате применения жесткого определения к результату DBPSK-демодуляции, и использована для декодирования параметров S1 и S2.
Последовательность первоначального сканирования
Здесь обработка сигнала при первоначальном сканировании, осуществляемая в приемном устройстве 51, будет описана со ссылками на блок-схемы, показанные на фиг.13 и фиг.14.
Фиг.13 и 14 в частности иллюстрируют часть обработки сигнала при первоначальном сканировании, показанной на фиг.74 в Руководстве по реализации (Implementation Guidelines (ETSI TR 102 831: IG)) к стандартам DVB-T2. Первоначальное сканирование осуществляется с целью определения в отношении различения кадров T2/FEF и т.п., например при первом включении источника питания, при изменении канала и т.д.
Сначала на этапе S1 блок 77 управления осуществляет управление тюнером (не показан) для выбора ширины полосы канала, сигнал которого нужно принять, из нескольких стандартных вариантов ширины полосы, таких как 6 МГц, 7 МГц, 8 МГц и т.п.
На этапе S2 блок управления 77 устанавливает центральную частоту канала, который нужно принять. Когда выбрана ширина полосы канала и установлена центральная частота канала с этой полосой, вводят OFDM-сигнал в блок 71 детектирования символа P1 и в блок 72 задержки.
На этапе S3 блок 71 детектирования символа P1 вычисляет значение корреляции интервала сигнала для каждого интервала входного сигнала посредством блока 71A вычисления значения корреляции и осуществляет детектирование символа P1.
На этапе S4 блок 71 детектирования символа P1 определяет, обнаружен ли символ P1 или нет. Например, если на заданном интервале обнаружено пиковое значение корреляции интервала сигнала, равная или превосходящая пороговую величину, тогда блок 71 детектирования символа P1 определяет, что обнаружен символ P1.
Если на этапе S4 определено, что обнаружен символ P1, тогда блок 71 детектирования символа P1 определяет пиковое значение корреляции интервала сигнала и устанавливает найденную позицию в начале кадра T2 на этапе S5. Блок 71 детектирования символа P1 устанавливает начальную позицию вычисления преобразования FFT с учетом позиции символа P1, т.е. в начале кадра T2, и выводит сигнал в позиции запуска, представляющей эту начальную позицию вычисления преобразования FFT, в блок 74 вычисления преобразования FFT и в блок 15 вычисления преобразования БРФ. Далее, блок 71 детектирования символа P1 определяет погрешность частоты в интервале несущей и выводит значение точного определения символа P1 с в блок 73 коррекции частоты и в блок 62 управления коррекцией.
OFDM-сигнал, задержанный в блоке задержки 72 и с погрешностью частоты, скорректированной, в блоке 73 коррекции частоты на основе значения точного определения символа P1, поступает в блок 74 вычисления преобразования FFT.
На этапе S6 блок 74 вычисления преобразования FFT вычисляет преобразование FFT для OFDM-сигнала символа P1, поступающего от блока 73 коррекции частоты, на основе позиции запуска от блока 71 детектирования символа P1. OFDM-сигнал частотной области, полученный в результате вычисления преобразования FFT, направляют в блок 75 вычисления корреляции последовательности CDS.
На этапе S7 блок 75 вычисления корреляции последовательности CDS вычисляет значение корреляции последовательности CDS на основе OFDM-сигнала после вычисления преобразования FFT и известной строки.
На этапе S8 блок 75 вычисления корреляции последовательности CDS определяет, является ли пиковое значение корреляции последовательности CDS равной или превосходящей пороговое значение, и обнаруживает символ P1.
Если на этапе S8 определено, что пиковое значение корреляции последовательности CDS меньше порогового значения, или если на этапе S4 определено, что символ P1 не обнаружен, то блок 77 управления на этапе S9 определяет, истекло ли время.
Если на этапе S9 определено, что время не истекло, то обработка возвращается к этапу S3, так что обнаружение символа P1 на основе значения корреляции интервала сигнала повторяется. Длительность одного кадра T2 составляет максимум 250 мс, и при приеме сигнала кадра T2, переданного в рассматриваемом канале, символ P1 детектируют один раз в 250 мс. Соответственно, если период времени, отсчитываемый с момента детектирования символа P1 на этапе S3, превышает заданный период времени, равный сумме 250 мс и некоторого запаса, принимается решение об истечении времени. Однако если указанный период времени не превышает заданного периода времени, определяют, что время не истекло.
Если на этапе S9 определено, что время истекло, блок 77 управления определяет на этапе S10, остается ли центральная частота, которая еще не была установлена.
Если на этапе S10 определено, что остается ситуация, когда центральная частота, которая еще не была установлена, обработка возвращается к этапу S2, на котором блок 77 управления устанавливает новую частоту в качестве центральной частоты. Затем повторяются процессы, описанные выше.
С другой стороны, если на этапе S10 определено, что больше не осталось центральной частоты, которая не была установлена, блок управления 77 определяет на этапе S11, остается ли ширина полосы, которая еще не была выбрана.
Если на этапе S11 определено, что остается ширина полосы, которая еще не была выбрана, тогда обработка возвращается к этапу S1, на котором блок 77 управления выбирает новую полосу. Затем блок 77 управления повторяет процессы, описанные выше.
С другой стороны, если на этапе S11 определено, что не осталось ширины полосы частот, которая еще не была выбрана, тогда блок 77 управления завершает первоначальное сканирование.
Если на этапе S8 принято решение, что пиковое значение корреляции последовательности CDS оказывается равным или большим пороговой величины и при этом происходит детектирование символа P1, тогда блок 75 вычисления корреляции последовательности CDS определяет погрешность частоты для каждой несущей на основе величин корреляции последовательности CDS на этапе S12. Кроме того, блок 75 вычисления корреляции последовательности CDS передает OFDM-сигнал после вычисления преобразования FFT и значение грубой коррекции символа P1 в блок 81 обработки грубой коррекции/дескремблирования. Эту величину грубой коррекции символа P1 выводят также в блок 62 управления коррекцией.
На этапе S13 блок 81 обработки грубой коррекции/дескремблирования корректирует погрешность частоты OFDM-сигнала на основе значения грубой коррекции для символа P1 и выполняет такие операции, как дескремблирование OFDM-сигнала.
На этапе S14 блок 76 декодирования осуществляет декодирование параметров S1 и S2. В частности, блок 82 демодулирования DBPSK-сигнала осуществляет DBPSK-демодуляцию OFDM-сигнала, к которому блок 81 обработки грубой коррекции/дескремблирования применил коррекцию частоты и другие подобные операции. Блок 83 декодирования параметра S1 и блок 84 декодирования параметра S2 вычисляют значение корреляции между строкой сигнальных точек, поступающей от блока 82 демодулирования DBPSK-сигнала, и известной последовательностью.
На этапе S15 блок 83 декодирования параметра S1 выбирает параметр S1 на основе вычисленных значений корреляции, а блок 84 декодирования параметра S2 выбирает параметр S2 на основе вычисленных значений корреляции. Параметр S1, выбранный блоком 83 декодирования параметра S1, и параметр S2, выбранный блоком 84 декодирования параметра S2, подают также в блок 77A различения T2/FEF в блоке 77 управления.
На этапе S16 блок различения 77A T2/FEF в блоке 77 управления определяет, равен ли параметр S1, выбранный блоком 83 декодирования параметра S1, значению "00X" (где Х равно 0 или 1).
Как описано выше со ссылками на фиг.5A, тот факт, что 3 бита параметра S1 в сигнале стандарта DVB-T2 - это "00X", означает, что кадр, включающий такой параметр S1, представляет собой кадр T2. Тот факт, что три бита параметра S1 отличны от "00X", означает, что кадр, включающий такой параметр S1, представляет собой не кадр T2, а FEF-сегмент.
Если на этапе S16 определено, что параметр S1, выбранный блоком 83 декодирования параметра S1, отличен от "00X", тогда блок 77A различения T2/FEF в блоке 77 управления определяет на этапе S17 представляет ли параметр S2, выбранный блоком 84 параметра S2, "XXX1".
Как описано выше со ссылками на фиг.5В, факт, что 4 бита параметра S2 согласно стандартам DVB-T2 составляют число "XXX1", означает, что принимаемый в данный момент канал включает сочетание кадров T2 и FEF-сегментов, т.е. находится в смешанном состоянии. В частности, определяется, что принимаемый в данный момент сигнал представляет собой FEF-сегмент из состава сигнала, включающего кадры T2, смешанные с FEF-сегментами.
Если на этапе S16 определено, что параметр S1, выбранный блоком 83 декодирования параметра S1, равен "00X", или если на этапе S17 определено, что параметр S2, выбранный блоком 84 декодирования параметра S2, равен "XXX1", процесс обработки сигнала продолжается.
Например, если на этапе S16 определено, что параметр S1, выбранный блоком 83 декодирования параметра S1, равен "00X", тогда определяют, равен ли параметр S2 значению "XXX1" или нет (не показано). Если определено, что параметр S2 не равен "XXX1", тогда определяют, что принимаемый в данный момент канал является каналом, передающим только сигнал T2. С другой стороны, если определено, что параметр S2 равен "XXX1", тогда определяют, что принимаемый в данный момент канал является каналом, передающим кадры T2 и FEF-сегменты в смешанном состоянии. В частности, определяют, что принимаемый в данный момент сигнал представляет собой участок кадра T2 из состава сигнала, включающего кадры T2 и FEF-сегменты в смешанном состоянии.
После этого в обоих случаях выполняют процессы для получения пред-сигналов L1 и пост-сигналов L1 из состава символа P2, такие как обнаружение информации о SISO/MISO и информации о размерности преобразования FFT, а также обнаружение и получение защитного интервала, и получают символ P2. После получения символа P2 обработка сигнала возвращается к этапу S10 на фиг.13, так что происходит повторение операций, начиная с этапа S10.
Например, если на этапе S17 определено решение, что параметр S2, выбранный блоком 84 декодирования параметра S2, равен "XXX1", и затем происходит детектирование следующего символа P1, тогда выполняют операции этапов с S5 по S15, после чего снова определяют, имеет ли параметр S1 величину "00X". Если параметр S1 равен "00X", тогда определяют, что принимаемый в данный момент канал представляет собой канал, в котором смешаны сигналы кадров T2 и FEF-сегменты, и выполняют операции настройки, описанные выше для получения символов P2. С другой стороны, если параметр S1 не равен "00X", тогда обработка сигнала возвращается к этапу S10 на фиг.13, так что описанные выше процессы повторяются.
С другой стороны, если на этапе S17 определено, что параметр S2 не равен "XXX1", тогда обработка сигнала возвращается к этапу S10 на фиг.13, так что описанные выше процессы повторяются.
Фиг.15 иллюстрирует обработку сигнала в блоке 77A различения T2/FEF в ходе процедуры обработки сигнала с момента начального сканирования, описанного выше со ссылками на фиг.13 и 14.
На этапе S51 блок 77A различения T2/FEF определяет, имеет ли параметр S1, выбранный блоком 83 декодирования параметра S1, значение "00X". Если на этапе S51 определено, что параметр S1, выбранный блок 83 декодирования параметра S1, равен "00X", тогда блок 77A различения T2/FEF генерирует результат определения, обозначающий, что принимаемый сигнал представляет собой кадр T2, и выводит сигнал результата определения в блоки 62 и 63 управления коррекцией.
Если на этапе S51 определено, что параметр S1, выбранный блоком 83 декодирования параметра S1, не равен "00X", тогда блок 77A различения T2/FEF определяет на этапе S53, имеет ли параметр S2, выбранный блоком 84 декодирования параметра S2, значение "XXX1".
Если на этапе S53 определено, что параметр S2, выбранный блоком 84 декодирования параметра S2, равен "XXX1", тогда блок 77A различения T2/FEF генерирует определения, обозначающий, что принимаемый сигнал представляет собой FEF-сегмент и передает сигнал результата определения блокам 62 и 63 управления коррекцией.
С другой стороны, если на этапе S53 определено, что параметр S2, выбранный блоком 84 декодирования параметра S2, не равен "XXX1", тогда блок 77A различения T2/FEF генерирует результат определения, обозначающий, что рассматриваемый сигнал не является ни кадром T2, ни FEF-сегментом, и передает сигнал результата определения блокам 62 и 63 управления коррекцией.
Здесь следует отметить, что в приведенном выше описании примера, изображенного на фиг.15, после определения на этапе S53, имеет ли параметр S2 величину "XXX1", выводят результат определения, обозначающий, является ли принимаемый сигнал FEF-сегментом, либо он не является ни кадром T2, ни FEF-сегментом. Однако, поскольку для блоков 62 и 63 управления коррекцией необходимо только определить по меньшей мере, является ли сигнал кадром T2 или нет, когда на этапе S51 определено, что параметр S1 не равен "00X", уже можно выводить результат определения, указывающий, что принимаемый сигнал не является кадром T2.
Блоки 62 и 63 принимают сигналы, представляющие результаты определений, и осуществляют по отдельности обработку сигналов следующим образом.
Фиг.16 иллюстрирует процесс управления коррекцией в блоке 62 управления коррекцией. Здесь следует отметить, что хотя содержание коррекции и вводимые измеренные величины отличаются, блок 63 управления коррекции выполняет в основном аналогичную обработку сигналов.
Этот процесс начинается, когда определено, что обнаружен символ P1, и когда блок 62 управления коррекцией принимает значение точного определения символа P1 от блока 61 обработки символа P1. Затем блок 62 управления коррекцией принимает значение точного определения символа P1 и значение грубого определения символа P1 от блока 61 обработки символа P1 и одновременно использует полученные значения для генерации значения корректирующей поправки частоты несущей. Здесь следует отметить, что, хотя это и не показано на фиг.7, в блок 63 управления коррекцией поступает от блока 61 обработки символа P1 также некоторый сигнал, представляющий факт обнаружения символа P1 и заменяющий значение точного определения символа P1 и значение грубого определенного символа P1.
Если блок 64 генерирования флага не определил, что принимаемый сигнал представляет собой FEF-сегмент, значение точного определения GI от блока 14 вычисления корреляции интервала GI, значение точного определения пилот-сигнала от блока 16 определения точной погрешности и значение грубого определения пилот-сигнала от блока 17 определения грубой погрешности поступают в блоки управления коррекцией. Другими словами, если получен символ P2 и на вход блока 64 генерирования флага поданы значения интервала между FEF-сегментами и длины FEF-сегмента, а затем на основании символа P2 и этих значений определено, что принимаемый в данный момент сигнал является FEF-сегментом, то, поскольку указанные выше значения определения в блоки управления коррекцией не поступают, процесс управления коррекцией, показанный на фиг.16, не выполняется.
На этапе S71 блок 62 управления коррекцией сохраняет введенные в него значения определения, т.е. значение точного определения GI от блока 14 вычисления корреляции интервала GI, значение точного определения пилот-сигнала от блока 16 декодирования точной погрешности и значение грубого определения пилот-сигнала от блока 17 декодирования с грубой погрешностью. Затем блок 62 управления коррекцией сохраняет введенные в него значения определения за исключением значения точного определения символа P1 и значения грубого определения символа P1, пока на этапе S72 не будет определено, является ли принятый сигнал кадром T2 или нет.
При этом блок 61 обработки символа P1 осуществляет обработку сигналов, как описано выше со ссылками на фиг.13-15, и получает от блока 77A различения T2/FEF сигнал с результатом определения T2/FEF. Блок 62 управления коррекцией определяет на этапе S72, означает ли результат определения T2/FEF, что принимаемый сигнал является кадром T2, т.е. является ли принимаемый в данный момент сигнал кадром T2.
Если на этапе S72 определено, что сигнал, принимаемый в данный момент, представляет собой кадр T2, тогда процесс обработки сигнала переходит к этапу S73, на котором блок 62 управления коррекцией управляет блоком 12 коррекции частоты несущей для выполнения коррекции с использованием сохраненных измеренных величин.
В частности, блок 62 управления коррекцией использует значение точного определения интервала GI, значение точного определения пилот-сигнала и значение грубого определения пилот-сигнала, сохраненные в нем, для генерации значения коррекции частоты несущей для последующей коррекции погрешности с использованием значения точного определения символа P1 и значения грубого определения символа P1 и передает значение коррекции частоты несущей блоку 12 коррекции частоты несущей.
После этого блок 62 управления коррекцией может применить последовательно введенные в него значения определения для немедленной коррекции, пока не будет принят следующий символ P1 и процесс, описанный выше, т.е. процесс, иллюстрируемый посредством фиг.16, не начнется для следующего символа P1.
С другой стороны, если на этапе S72 определено, что принимаемый в данный момент сигнал не является кадром T2, тогда процесс обработки сигналов переходит к этапу S74. На этапе S74 блок 62 управления коррекцией сбрасывает сохраненные в нем значения точного определения интервала GI, значение точного определения пилот-сигнала и значение грубого определения пилот-сигнала, тем самым завершая обработку. Другими словами, блок 62 управления коррекцией находится в режиме ожидания до прихода следующего символа P1 и снова начинает процесс обработки для этого следующего символа P1.
Фиг.17 иллюстрирует промежуток времени до получения результата определения T2/FEF, а фиг.18 иллюстрирует момент времени коррекции. Следует отметить, что на фиг.17 и 18 по оси абсцисс отложено время, а треугольная метка обозначает заданный момент времени.
Треугольник 101 указывает момент времени, когда блок 71 детектирования символа P1 обнаруживает символ P1 и одновременно с обнаружением символа P1 определяет значение такого определения символа P1, а также указывает момент времени, когда следует начать вычисление преобразования FFT. Треугольник 102-1 указывает момент времени завершения вычисления преобразования FFT в блоке 74 и указывает момент времени, когда следует начать вычисление корреляции последовательности CDS для определения значения грубого определения символа P1 посредством блока 75 вычисления корреляции последовательности CDS. Другими словами, интервал между треугольником 101 и треугольником 102-1 представляет период времени вычисления преобразования FFT, хотя он и зависит от монтажа.
Треугольник 102-2 указывает момент времени, когда блок 75 вычисления корреляции последовательности CDS определяет значение грубого определения символа P1. Другими словами, интервал между треугольником 102-1 и треугольником 102-2 представляет период времени определения значения грубого определения символа P1. Здесь следует отметить, что этот период времени также зависит от ресурса монтажа и диапазона детектирования.
Треугольник 103 указывает момент времени, когда блок 77A различения T2/FEF завершает определение T2/FEF на основе параметров S1 и S2. Другими словами, интервал между треугольником 101 и треугольником 103 представляет период времени, в который выполняется определение T2/FEF, т.е. интервал неопределенности T2 или FEF.
Хотя период времени вычисления преобразования FFT, представленный интервалом между треугольником 101 и треугольником 102-1, и период определения значения грубого определения символа P1, представленный интервалом между треугольником 102-1 и треугольником 102-2, зависят от установки таким образом, что когда эти интервалы велики, момент завершения определения T2/FEF, обозначенный треугольником 103, наступает позже завершения интервала P2.
Таким образом, в момент, представленный треугольником 101, когда определяется значение точного определения символа P1, осуществляется коррекция с использованием значения точного определения символа P1, как показано на фиг.18. С другой стороны, в течение периода времени, представленного интервалом между треугольником 101 и треугольником 103, когда происходит процесс определения T2/FEF, осуществляется только определение погрешностей посредством блоков, отличных от блока 61, т.е. посредством блока 14 вычисления корреляции GI, детектора 16 точной погрешности, детектора 17 грубой погрешности и детектора 18 погрешности дискретизации. Затем, в момент времени, обозначенный треугольником 103, в который завершается процесс определения T2/FEF, на основе результата определения T2/FEF можно узнать, является ли принимаемый сигнал кадром T2. Поэтому, блоки 62 и 63 управления коррекцией применяют значения определения, погрешность которых определена в период между треугольником 101 и треугольником 103, после момента времени, обозначенного треугольником 103.
Фиг.19 иллюстрирует определение погрешности и момент времени, когда применяется найденное при этом значение. Здесь следует отметить, что на фиг.19 те треугольники, которые соответствуют треугольникам на фиг.17 и 18, снабжены соответствующими цифровыми позиционными обозначениями.
В примере, изображенном на фиг.19, треугольники 111-114 указывают моменты определения погрешностей измеренной значения точного определения GI, значения точного определения пилот-сигнала, значения грубого определения пилот-сигнала и значения определения погрешности дискретизации, а треугольник 121 указывает момент времени, в который применяют эти значения определения. Кроме того, треугольник 122 указывает момент времени, когда применяют значение точного определения символа P1.
В частности, значение точного определения символа P1 из блока 61 обработки символа P1 определяют в момент, обозначенный треугольником 101, и применяют для коррекции частоты несущей в ближайший следующий момент, указанный треугольником 122.
С другой стороны, что касается значения точного определения GI из блока 14 вычисления интервала GI, определение производится дважды, как показано треугольниками 111-1 и 111-2, в течение указанного треугольником 101 и треугольником 103 периода времени, в котором происходит процесс определения T2/FEF. Таким образом, в блоке 62 управления коррекцией сохраняют два значения точного определения GI. Затем, в момент треугольника 103, когда завершается процесс определения T2/FEF, на основе результата этого процесса T2/FEF принимают решение, что сигнал представляет собой кадр T2. Поэтому, блок 62 управления коррекцией применяет значения точного определения GI к коррекции частоты несущей в момент времени, обозначенный треугольником 121-1 позднее треугольника 103. Здесь следует отметить также, что после этого блок 14 вычисления корреляции интервала GI последовательно определяет значение точного определения GI в моменты, обозначенные треугольниками 111-3, 111-4 и 111-5, а найденные значения точного определения GI могут быть сразу же применены прежде, чем будет обнаружен следующий символ P1.
Что касается значения определения пилот-сигнала из детектора 16 точной погрешности, детектирование осуществляется только один раз, как обозначено треугольником 121-1, за период времени, представленный треугольником 101 и треугольником 103, в который определяют T2/FEF. Таким образом, в блоке 62 управления коррекцией сохраняют единственное значение точного определения пилот-сигнала, полученное при детектировании. Затем в момент треугольника 103, когда завершается процесс определения T2/FEF, на основе результата этого процесса T2/FEF становится известно, что рассматриваемый сигнал представляет собой кадр T2. Поэтому блок 62 управления коррекцией применяет значение точного определения пилот-сигнала к коррекции частоты несущей в момент времени, обозначенный треугольником 121-2 позднее треугольника 103. Здесь следует отметить также, что после этого детектор 16 точной погрешности последовательно определяет значения точного определения пилот-сигнала с малой погрешностью в моменты, обозначенные треугольниками 112-2, 112-3 и 112-4, а найденные в эти моменты значения определения могут быть сразу же применены прежде, чем будет обнаружен следующий символ P1.
Что касается значения определения пилот-сигнала из детектора 17 грубой погрешности, то детектирование осуществляется дважды, как обозначено треугольниками 113-1 и 113-2, за период времени, представленный треугольником 101 и треугольником 103, в который происходит определение T2/FEF. Таким образом, в блоке 62 управления коррекцией сохраняют два значения грубого определения пилот-сигнала, полученных при детектировании. Затем в момент треугольника 103, когда завершается процесс определения T2/FEF, на основе результата определения T2/FEF становится известно, что рассматриваемый сигнал представляет собой кадр T2. Поэтому блок 62 управления коррекцией применяет значения грубого определения пилот-сигнала к коррекции частоты несущей в момент времени, обозначенный треугольником 121-3 позднее треугольника 103. Здесь следует отметить также, что после этого детектор 17 грубой погрешности последовательно определяет значения грубого определения пилот-сигнала в моменты, обозначенные треугольниками 113-3, 113-4 и 113-5, а найденные в эти моменты значения коррекции погрешностей могут быть сразу же применены прежде, чем будет обнаружен следующий символ P1.
Что касается значения определения погрешности из детектора 18 погрешности дискретизации, то детектирование осуществляется только один раз, как обозначено треугольником 114-1, за период времени, представленный треугольником 101 и треугольником 103, в которой происходит определение T2/FEF. Таким образом, в блоке 63 управления коррекцией сохраняют единственное значение коррекции погрешности. Затем в момент треугольника 103, когда завершается процесс определения T2/FEF, на основе результата определения T2/FEF становится известно, что рассматриваемый сигнал представляет собой кадр T2. Поэтому, блок 63 управления коррекцией применяет значение определения погрешности к коррекции частоты дискретизации в момент времени, обозначенный треугольником 121-4 позднее треугольника 103. Здесь следует отметить также, что после этого детектор 18 погрешности дискретизации последовательно определяет значения определения погрешности в моменты, обозначенные треугольниками 114-2, 114-3 и 114-4, а значения коррекции погрешностей могут быть сразу же применены прежде, чем будет обнаружен следующий символ P1.
Здесь следует отметить, что в примере, показанном на фиг.19, определение значения точного определения GI и значения грубого определения пилот-сигнала осуществляется дважды за период времени, представленный треугольником 101 и треугольником 103, в который происходит определение T2/FEF. В частности, когда значение определения может быть определено один раз для одного OFDM-символа, а между получением значений параметров S1 и S2 создана задержка более двух OFDM-символов, значение определения может быть получено несколько раз подобно значению точного определения GI и значению грубого определения пилот-сигнала на фиг.19.
В данном случае, коррекция частоты несущей с использованием значения точного определения GI, значения точного определения пилот-сигнала, значения грубого определения пилот-сигнала и т.п., а также коррекция погрешности дискретизации с использованием значения определения погрешности, имеет такую характерную особенность, что влияние шумов можно уменьшить путем усреднения значений определения посредством накопления.
Соответственно, усреднение посредством накопления значений определения позволяет ожидать значительного повышения точности. Следовательно, появляется возможность избежать потери возможности определения погрешностей на интервале неопределенности T2 или FEF.
Как описано выше, согласно настоящему изобретению на интервале неопределенности T2 или FEF осуществляют только определение погрешности, а когда будет определено, что принимаемый сигнал представляет собой кадр T2, найденное значение используют для коррекции этой погрешности.
Ранее, при приеме «смешанного» сигнала в период времени до момента получения значений параметров S1 и S2, включенных в состав символа P1, существовала вероятность, что принимаемый в данный момент сигнал может оказаться FEF-сегментом. Поэтому коррекция погрешности частоты несущей и коррекция погрешности частоты дискретизации были ограничены.
В частности, поскольку символ P2 включает большее число пилот-сигналов, чем обычный символ, и при этом такие пилот-сигналы расположены через фиксированные интервалы независимо от структуры пилот-сигналов, уже изначально стала возможной коррекция с более высокой степенью точности за счет определения погрешности с использованием таких пилот-сигналов. Однако, поскольку в начале кадра невозможно решить, представляет ли собой сигнал T2 или FEF, такая невозможность оказывает влияние на помехоустойчивость сразу же после начала приема и на вхождение в стабилизированное состояние.
Таким образом, согласно настоящему изобретению, в пределах интервала неопределенности T2 или FEF определение погрешности можно производить аналогично случаю, когда принимается кадр T2, а значение коррекции погрешности можно применить, когда будет принято решение, что это действительно принимается кадр T2. В результате, при приеме «смешанного» сигнала можно не допустить появления описанного выше ограничения или ослабить это ограничение.
Исходя из вышеизложенного, даже при приеме сигнала, включающего сигнал, отличный от кадра T2, можно добиться улучшения стабильности и помехоустойчивости в начале приема.
Здесь следует отметить, что хотя в приведенном выше описании рассмотрен пример, когда принимается сигнал, включающий кадр T2 и/или FEF-сегмент, настоящее изобретение не ограничивается кадром T2 или FEF-сегментом, а число участвующих сигналов не ограничивается двумя. Другими словами, настоящее изобретение можно применить к устройству, которое принимает сигнал, включающий по меньшей мере один из нескольких сигналов с отличными один от другого структурами, и выделяет эти сигналы.
Модификации
На фиг.20 показан пример конфигурации приемной системы, в которой использовано приемное устройство согласно варианту настоящего изобретения.
Согласно фиг.20, показанная приемная система включает блок 201 получения, блок 202 обработки декодирования линии передачи и блок 203 обработки декодирования источника информации.
Блок 201 получения получает сигнал через линию передачи, например систему наземного цифрового вещания, спутниковое цифровое вещание, сеть кабельного телевидения, Интернет или какую-либо иную сеть, и передает полученный сигнал в блок 202 обработки декодирования линии передачи.
Блок 202 обработки декодирования линии передачи выполняет процесс декодирования линии передачи, включая коррекцию погрешностей, для сигнала, полученного через линию передачи блоком 201 получения, и передает результирующий сигнал в блок 203 обработки декодирования источника информации. Приемное устройство 51, показанное на фиг.7, включено в состав блока 202 обработки декодирования линии передачи.
Блок 203 обработки декодирования источника информации раскрывает сигнал после выполнения для него процесса декодирования линии передачи, чтобы раскрыть сжатую информацию и преобразовать ее в исходную информацию, и осуществляет процесс декодирования источника информации, включающий в себя процесс получения данных передаваемого объекта.
В частности, сигнал, полученный через линию передачи посредством блока 201 получения, иногда находится в сжатом кодированном состоянии, в котором информация сжата с целью уменьшения объема данных изображения, данных звука и прочих данных. В этом случае блок 203 обработки декодирования источника информации выполняет для сигнала, к которому необходимо применить процесс декодирования линии передачи, процесс декодирования источника информации, например, процесс для раскрытия сжатой информации и восстановления исходной информации.
Здесь следует отметить, что если сигнал, полученный через линию передачи посредством блока 201 получения, не находится в сжатом кодированном состоянии, блок 203 обработки декодирования источника информации не выполняет процесс раскрытия сжатой информации и восстановления исходной информации. В данном случае такой процедурой раскрытия может быть, например, декодирование сигнала, кодированного в стандарте MPEG (MPEG-декодирование). В то же время процедура декодирования источника информации может включать дескремблирование и т.п. в дополнение к процедуре раскрытия.
Приемная система, изображенная на фиг.20, может быть использована, например, в телевизионном тюнере для приема передач цифрового телевизионного вещания и т.п. Следует отметить, что каждый из блоков - блок 201 приема, блок 202 обработки декодирования линии передачи и блок 203 обработки декодирования источника информации - может быть выполнен в виде одного независимого устройства, такого как аппаратурный компонент, например интегральная схема (1C), или программный модуль.
Кроме того, блок 201 получения, блок 202 обработки декодирования линии передачи и блок 203 обработки декодирования источника информации могут быть совместно выполнены в виде одного независимого устройства. Можно также выполнить блок 201 получения и блок 202 обработки декодирования линии передачи совместно в виде одного независимого устройства, а также выполнить блок 202 обработки декодирования линии передачи и блок 203 обработки декодирования источника информации совместно в виде одного независимого устройства.
На фиг.21 показан пример выполнения второго варианта приемной системы, в которой использовано приемное устройство согласно вариантам настоящего изобретения.
В конфигурации, показанной на фиг.21, компоненты, соответствующие конфигурации, изображенной на фиг.20, имеют такие же позиционные обозначения, так что повторяющееся описание будет опущено.
Приемная система, показанная на фиг.21, аналогична приемной системе, изображенной на фиг.20, в том, что она тоже включает в себя блок 201 получения, блок 202 обработки декодирования линии передачи и блок 203 обработки декодирования источника информации, но отличается тем, что она дополнительно включает блок 211 вывода.
Блок 211 вывода может включать в себя, например, устройство отображения для отображения изображения и/или громкоговоритель для вывода звука и выводит изображение, звук или аналогичную информацию на основе выходного сигнала блока 203 обработки декодирования источника информации. Другими словами, блок 211 отображает изображение или выводит звук.
Приемная система, изображенная на фиг.21, может быть применена, например, в телевизоре для приема передач телевизионного вещания в форме цифрового вещания, в радиоприемнике для приема радиовещательных передач и т.д.
Здесь следует отметить, что если сигнал, получаемый блоком 201 получения, не находится в сжатом кодированном состоянии, тогда выходной сигнал блока 202 обработки декодирования линии передачи поступает сразу в блок 211 вывода.
На фиг.22 показан пример конфигурации третьего варианта приемной системы, в которой использовано приемное устройство согласно вариантам настоящего изобретения.
В конфигурации, показанной на фиг.22, компоненты, соответствующие конфигурации, изображенной на фиг.20, имеют такие же позиционные обозначения, так что повторяющееся описание будет опущено.
Показанная на фиг.22 приемная система аналогична приемной системе, изображенной на фиг.20, в том, что она тоже включает блок 201 получения и блок 202 обработки декодирования линии передачи, но отличается тем, что она не содержит блок 203 обработки декодирования источника информации, но дополнительно включает в себя блок 221 записи.
Блок 221 записи записывает выходной сигнал блока 202 обработки декодирования линии передачи, такой как, например, пакет TS из состава транспортного потока (TS) в стандарте MPEG, на носителе записи или в запоминающем устройстве, таком как оптический диск, жесткий диск или магнитный диск, либо флэш-память.
Показанная на фиг.22 приемная система, имеющая описанную выше конфигурацию, может быть применена в записывающем устройстве для записи передач телевизионного вещания и т.д.
Здесь следует отметить, что приемная система, представленная на фиг.22, может дополнительно включать блок 203 обработки декодирования источника информации, так что выходной сигнал блока 203 обработки декодирования источника информации после выполнения процесса такого декодирования, т.е. изображение или звук, полученные в результате декодирования, может быть записан блоком 221 записи.
Хотя описанная выше последовательность процессов может быть выполнена аппаратно, в другом варианте она может быть реализована посредством программного обеспечения. В случае выполнения рассматриваемой последовательности процессов посредством программного обеспечения программу, составляющую соответствующее программное обеспечение, инсталлируют с носителя записи программы в компьютере, входящем в состав аппаратуры для эксклюзивного использования, или в персональном компьютере для универсального использования.
На фиг.23 показан пример конфигурации компьютера, выполняющего последовательность процессов, описанную выше, в соответствии с программой. Фиг.23 представляет пример конфигурации компьютера, выполняющего описанную выше последовательность процессов в соответствии с программой.
На фиг.23 изображены центральный процессор (CPU) 251, постоянное запоминающее устройство (ПЗУ) 252 и оперативное запоминающее устройство (ОЗУ) 253, соединенные друг с другом посредством шины 254.
Кроме того, с шиной 254 соединен интерфейс 255 ввода/вывода. С интерфейсом 255 ввода/вывода соединены блок 256 ввода, включающий в себя клавиатуру, мышь и т.п., и блок 257 вывода, включающий блок отображения, громкоговоритель и т.д. С интерфейсом 255 ввода/вывода соединены также блок 258 памяти, образованный жестким диском, энергонезависимым запоминающим устройством или аналогичным устройством, блок 259 связи на основе сетевого интерфейса и т.п. и привод 260 для приведения в действие сменного носителя 261.
В компьютере, конфигурированном, как описано выше, центральный процессор CPU 251 загружает, например, программу, записанную в блоке 258 записи, в ОЗУ 253 через интерфейс 255 ввода/вывода и шину 254 и затем выполняет программу для осуществления описанной выше последовательности процессов.
Программа для выполнения процессором CPU 251 может быть записана, например, на сменном носителе 261 записи или передана через проводную или радио систему связи, такую как локальная сеть связи, Интернет или сеть цифрового вещания, и инсталлирована в блоке 258 записи.
Следует отметить, что программа для выполнения компьютером может представлять собой программу, выполнение которой происходит во временной последовательности в соответствии с описанным здесь порядком, или программу, исполнение которой происходит параллельно или осуществляется в нужный момент времени, например, в ответ на вызов программы.
Хотя предпочтительные варианты настоящего изобретения описаны здесь с использованием специальных терминов, такое описание дано исключительно в иллюстративных целях, так что следует понимать, что могут быть внесены изменения или различные вариации, не отклоняясь отдуха и объема последующей формулы настоящего.
Предмет настоящего изобретения связан с предметом, описанным в приоритетной заявке на патент Японии JP 2009-247756, поданной в Патентное ведомство Японии 28 октября 2009. Все содержимое заявки во всей полноте включено в рассматриваемый документ посредством ссылки.

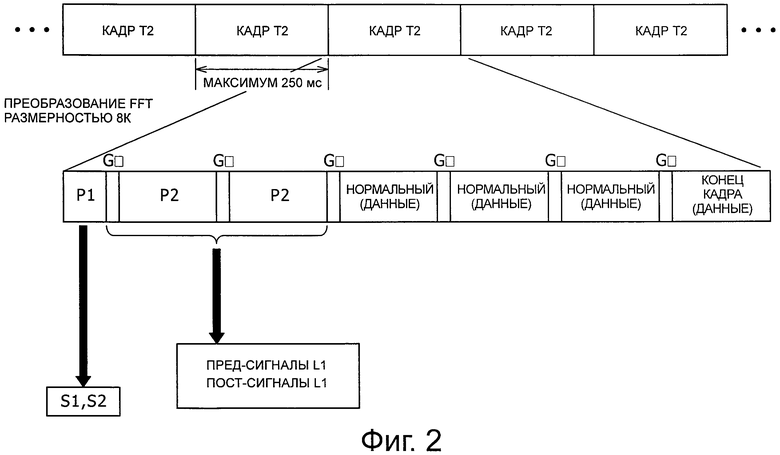
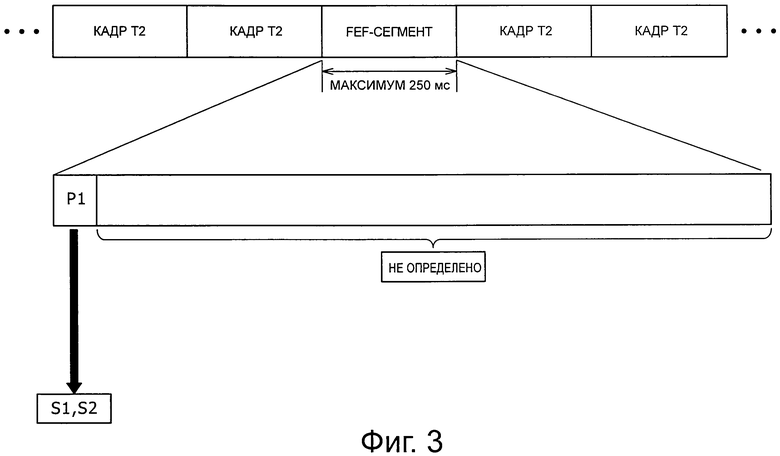
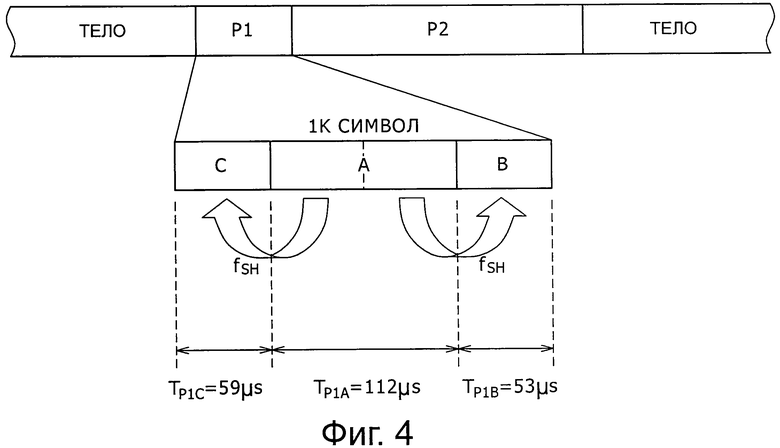
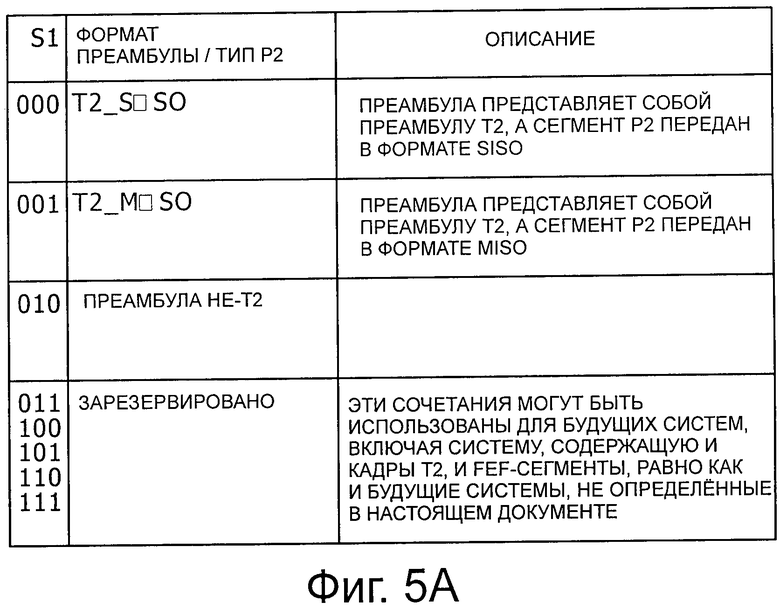
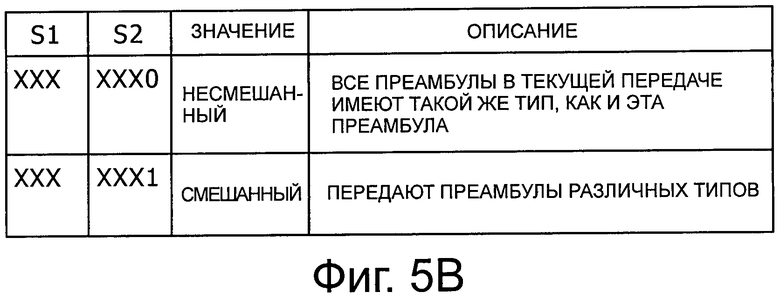
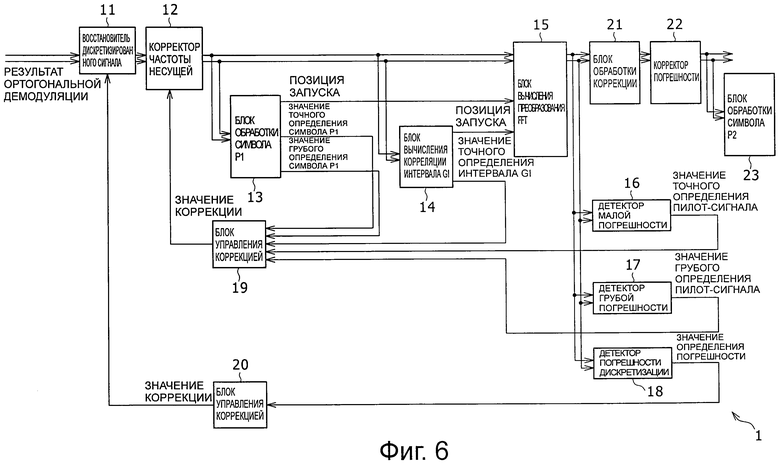
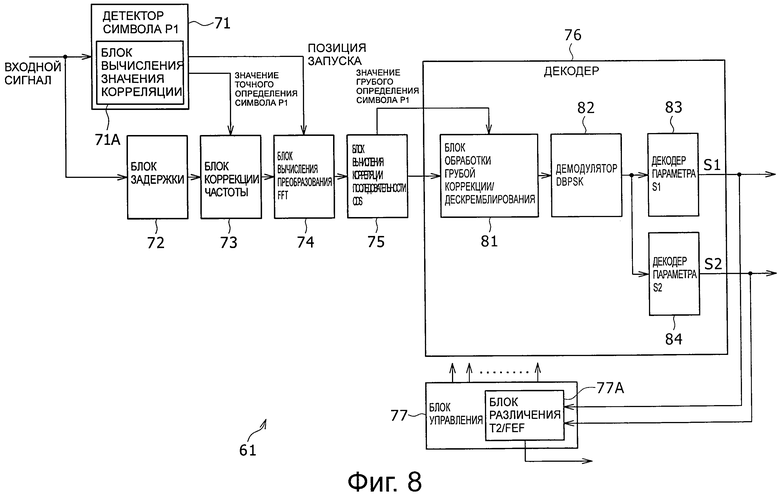
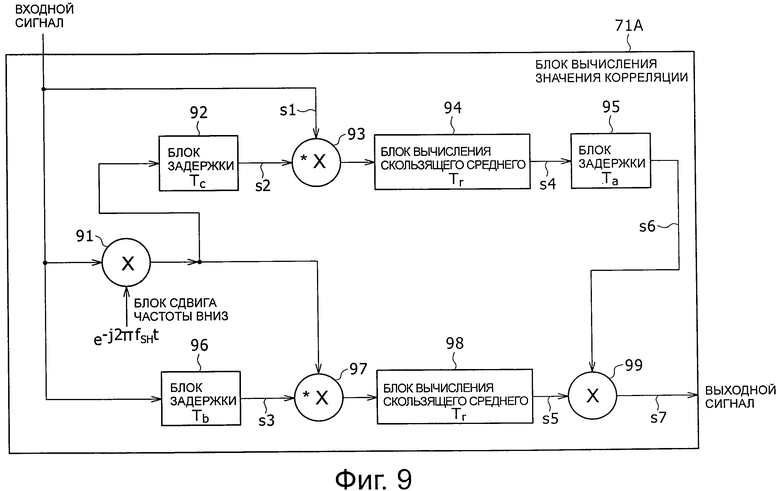
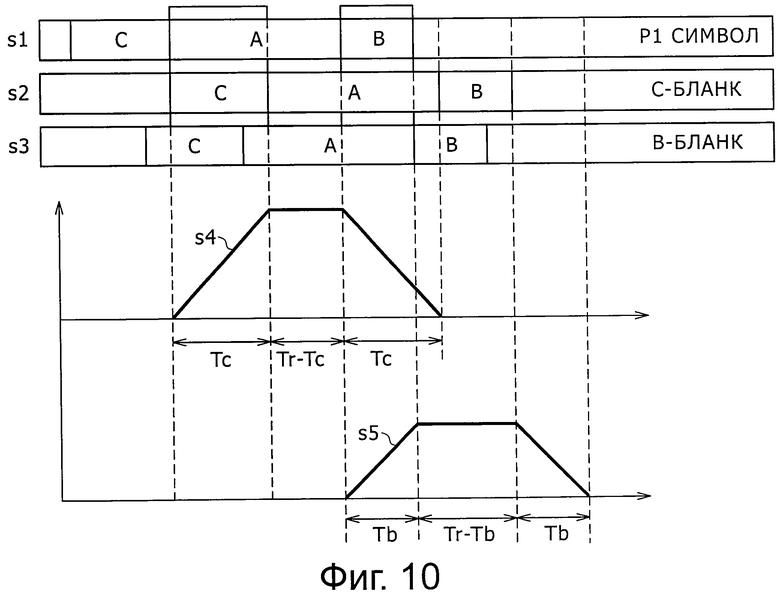
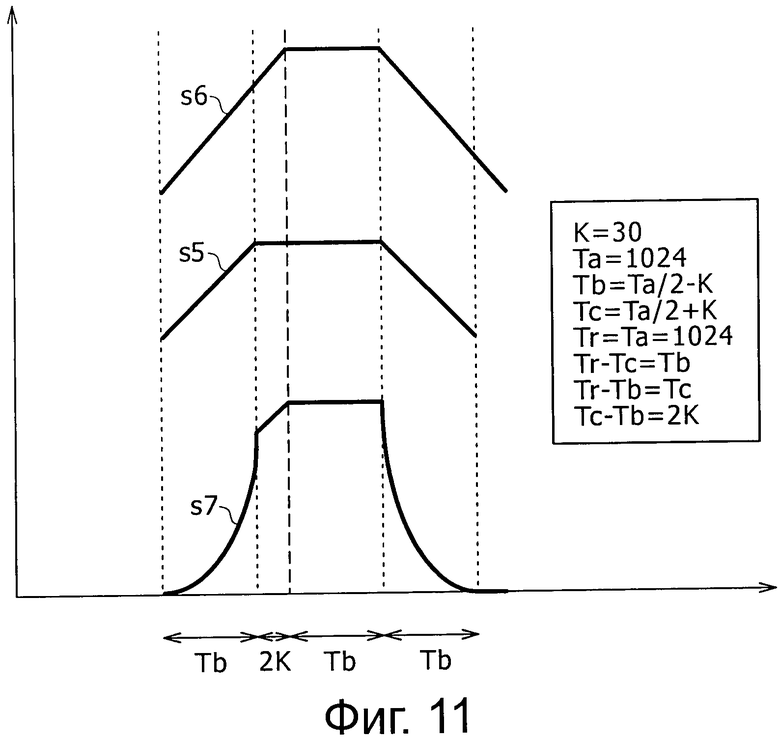
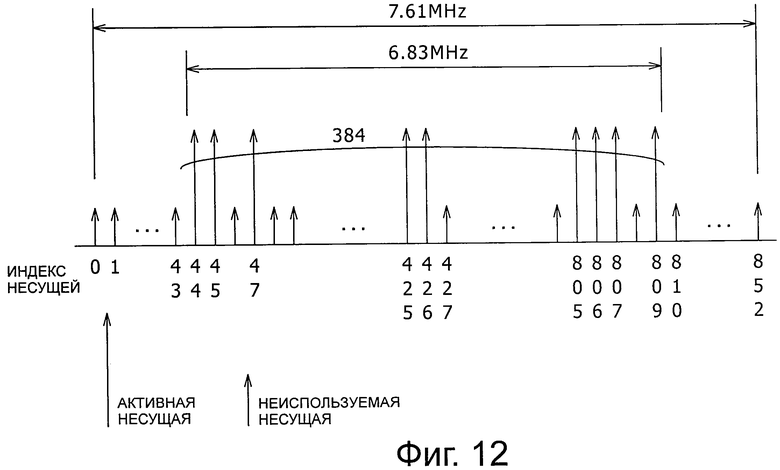
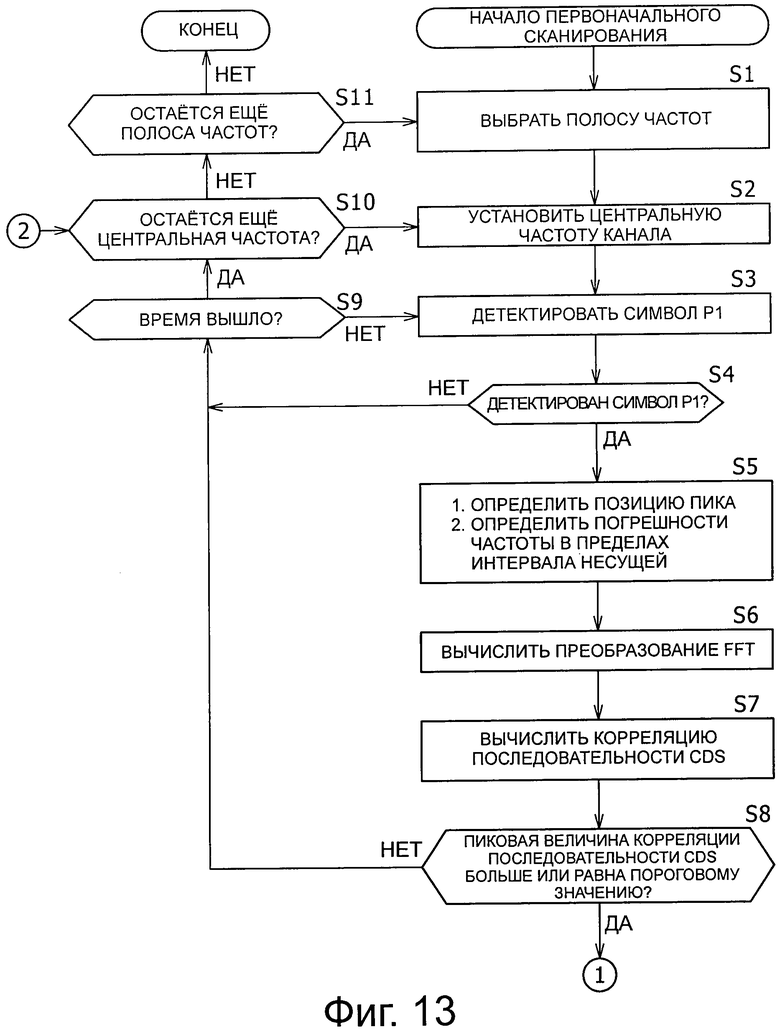
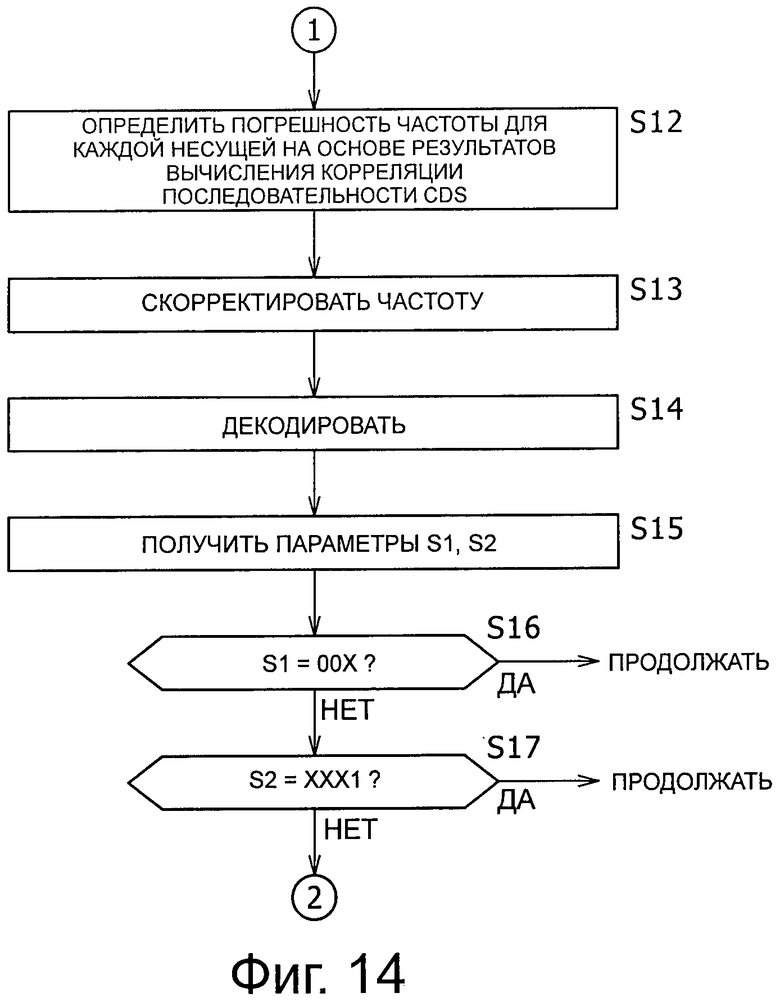
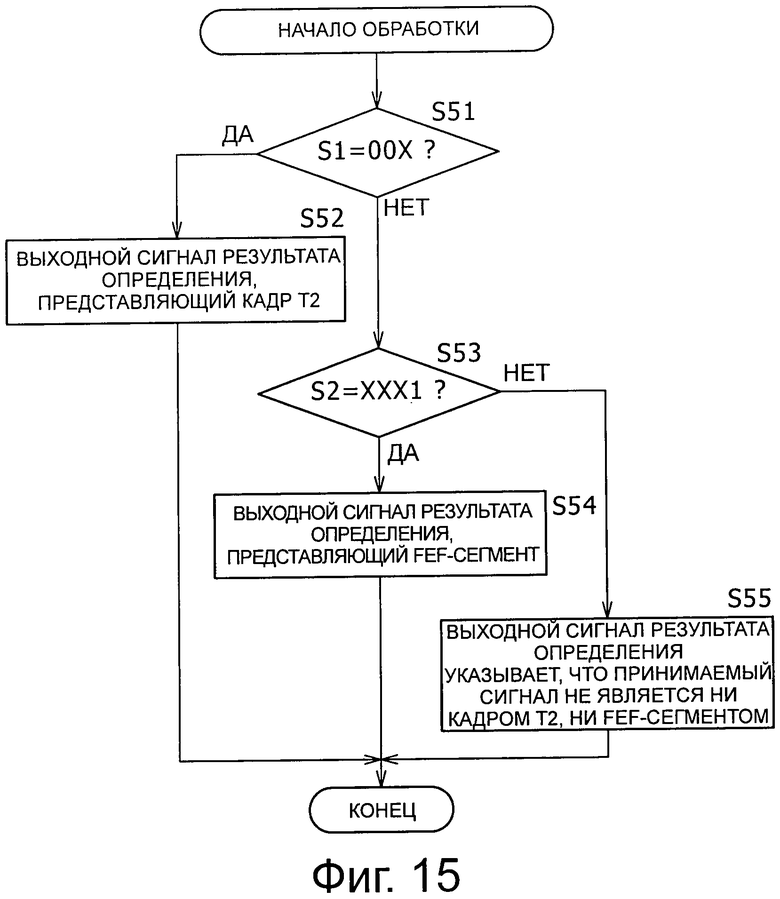
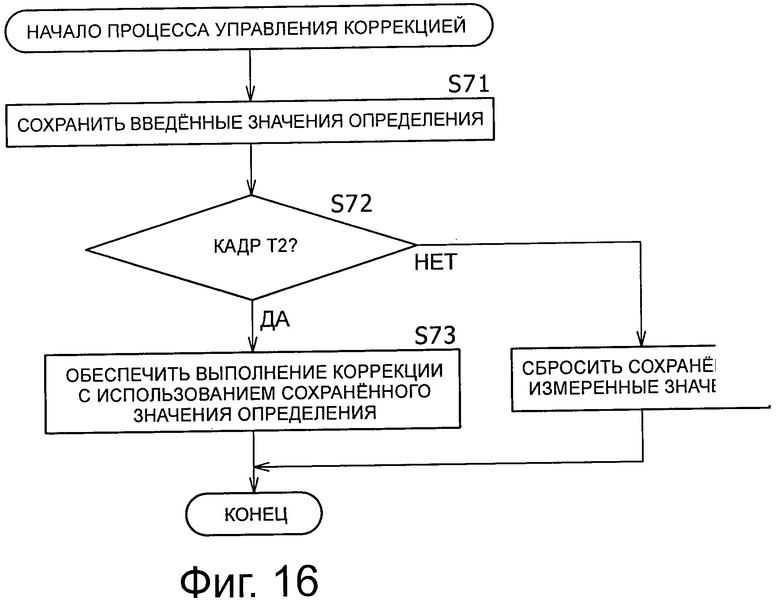
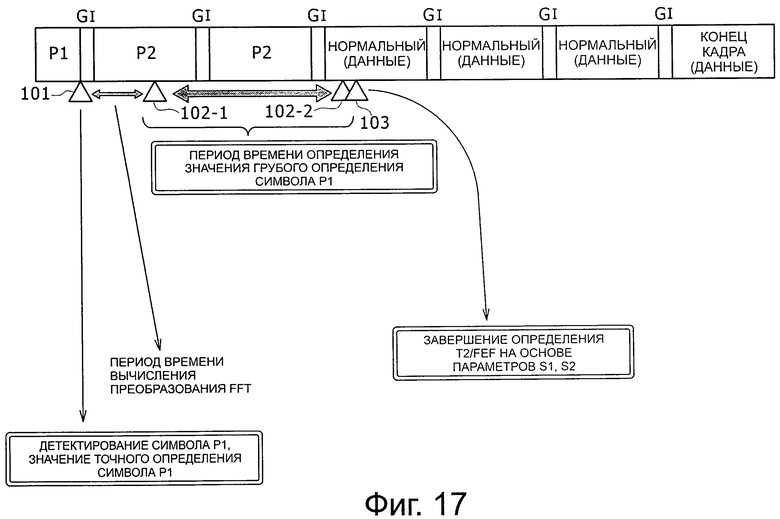
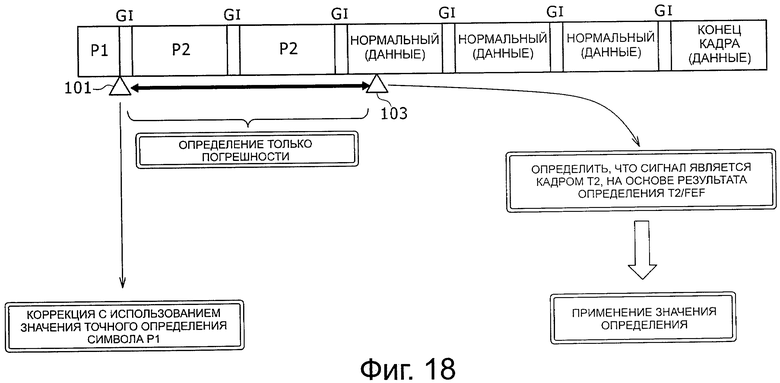
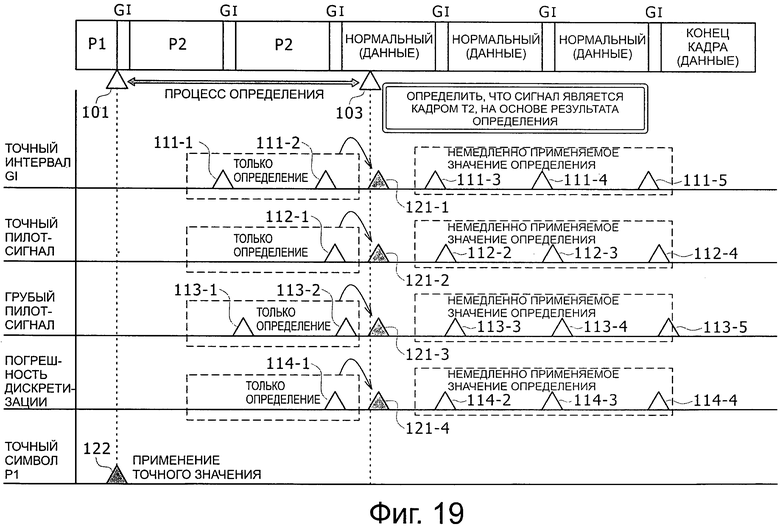
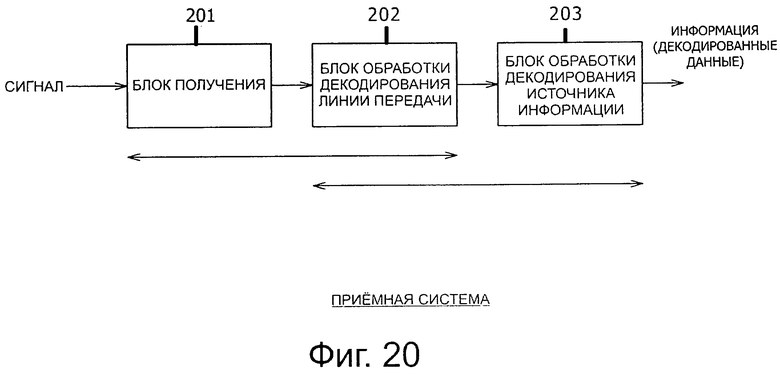
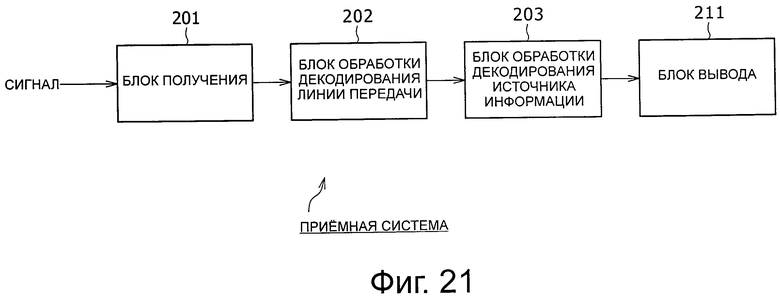
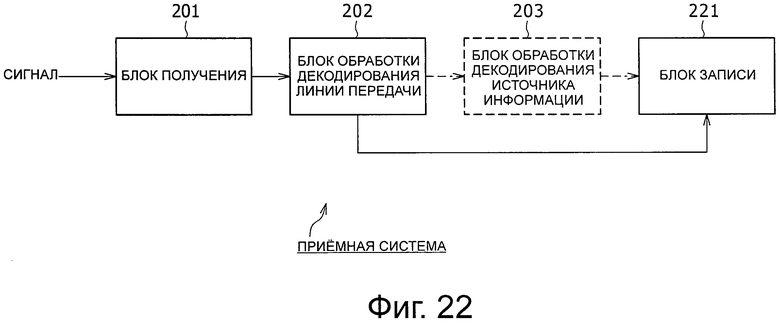
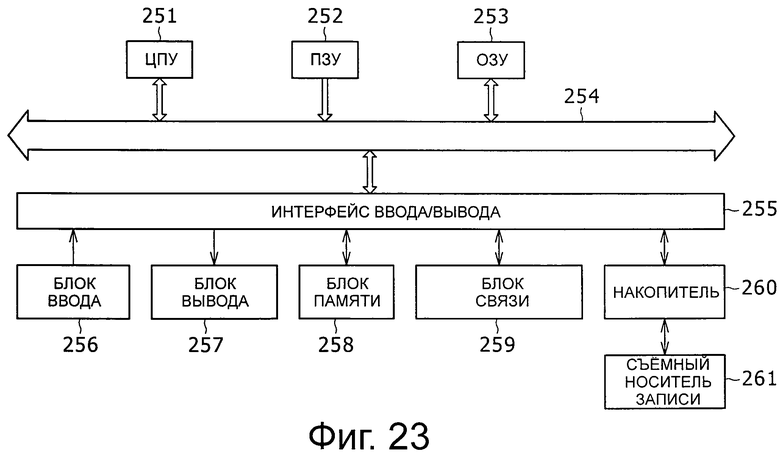
Изобретение относится к системам цифрового вещания. Технический результат заключается в повышении помехоустойчивости. Раскрыто приемное устройство, включающее в себя блок получения, выполненный с возможностью получения сигнала, включающего в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы, и с возможностью получения сигнала преамбулы из получаемого сигнала; блок детектирования, выполненный с возможностью определения значения коррекции с использованием получаемого сигнала, для коррекции получаемого сигнала; и блок коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого блоком детектирования, если на основе сигнала преамбулы, получаемого блоком получения, определено, что получаемый сигнал является первым сигналом. 11 н. и 4 з.п. ф-лы, 24 ил.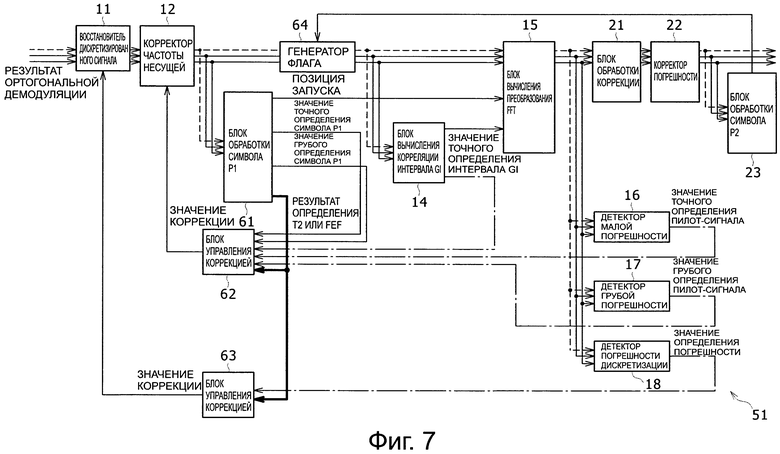
1. Приемное устройство содержащее:
первое средство получения для приема сигнала, включающего в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы, и для получения сигнала преамбулы из принимаемого сигнала;
средство детектирования для определения значения коррекции принимаемого сигнала с использованием принимаемого сигнала; и
средство коррекции для коррекции принимаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого первым средством получения, определено, что принимаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого первым средством получения, определено, что принимаемый сигнал не является первым сигналом.
2. Приемное устройство по п.1, в котором средство коррекции выполнено с возможностью корректировать принимаемый сигнал с использованием значения, определяемого средством детектирования, до получения следующего сигнала преамбулы первым средством получения, если определено, что принимаемый сигнал является первым сигналом, и сбрасывать значение, определяемое средством детектирования, до получения следующего сигнала преамбулы первым средством получения, если определено, что принимаемый сигнал не является первым сигналом.
3. Приемное устройство по п.2, дополнительно содержащее:
второе средство получения для получения из принимаемого сигнала другого сигнала преамбулы, следующего за указанным сигналом преамбулы, когда принимаемый сигнал является первым сигналом; и
средство запрета обработки для запрета процесса определения в средстве детектирования на основе информации о втором сигнале, включенной в указанный другой сигнал преамбулы, получаемый вторым средством получения.
4. Приемное устройство по п.3, в котором информация о втором сигнале представляет собой длительность и расстояние между интервалами второго сигнала в принимаемом сигнале.
5. Приемное устройство по п.1, в котором средство детектирования выполнено с возможностью определять точную величину смещения несущей на основе корреляции защитного интервала, включенного в принимаемый сигнал, точную величину смещения несущей на основе пилот-сигнала, включенного в принимаемый сигнал, или грубую величину смещения несущей либо величину погрешности дискретизации в качестве значения для коррекции принимаемого сигнала.
6. Способ приема, содержащий этапы, на которых:
принимают сигнал, включающий в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы; и получают сигнал преамбулы из принимаемого сигнала;
определяют значение коррекции принимаемого сигнала с использованием принимаемого сигнала;
корректируют принимаемый сигнал с использованием определенного значения коррекции, если на основе полученного сигнала преамбулы определяют, что принимаемый сигнал является первым сигналом; и
сбрасывают значение, определяемое средством детектирования, если на основе полученного сигнала преамбулы определяют, что принимаемый сигнал не является первым сигналом.
7. Приемная система, содержащая:
блок получения для получения сигнала по линии передачи; и
блок обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи;
причем сигнал, получаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом блок обработки декодирования линии передачи включает в себя
средство получения для получения сигнала преамбулы из принимаемого сигнала,
средство детектирования для определения значения коррекции принимаемого сигнала с использованием принимаемого сигнала, и
средство коррекции для коррекции принимаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
8. Приемная система, содержащая:
блок обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающий в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи; и
блок обработки декодирования источника информации для выполнения процесса декодирования источника информации, включающего в себя по меньшей мере процесс раскрытия сжатой информации для восстановления исходной информации для сигнала, для которого выполняется процесс декодирования линии передачи;
причем сигнал, получаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом блок обработки декодирования линии передачи включает в себя
средство получения для получения сигнала преамбулы из получаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что получаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
9. Приемная система, содержащая:
блок обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи; и
блок вывода для вывода изображения или звука на основе сигнала, в отношении которого выполняется процесс декодирования линии передачи;
причем сигнал, получаемый по линии передачи, включает в себя по меньшей мере первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом блок обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из получаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что получаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
10. Приемная система, содержащая:
блок обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи; и
блок записи для записи сигнала, в отношении которого выполняется процесс декодирования линии передачи;
причем сигнал, получаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом блок обработки декодирования линии передачи включает в себя
средство получения для получения сигнала преамбулы из получаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что получаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
11. Приемное устройство, содержащее:
блок получения, выполненный с возможностью приема сигнала, включающего в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы, и с возможностью получения сигнала преамбулы из принимаемого сигнала;
блок детектирования, выполненный с возможностью определения значения коррекции с использованием принимаемого сигнала, и
блок коррекции, выполненный с возможностью коррекции принимаемого сигнала с использованием значения коррекции, определяемого блоком детектирования, если на основе сигнала преамбулы, получаемого блоком получения, определено, что принимаемый сигнал является первым сигналом,
при этом блок коррекции выполнен с возможностью сбрасывать значение, определяемое блоком детектирования, если на основе сигнала преамбулы, получаемого блоком получения, определено, что принимаемый сигнал не является первым сигналом.
12. Приемная система, содержащая:
средство получения для получения сигнала по линии передачи; и
средство обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи;
причем сигнал, получаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом средство обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из принимаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции принимаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
13. Приемная система, содержащая:
средство обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи; и
средство обработки декодирования источника информации для выполнения процесса декодирования источника информации, включающего в себя по меньшей мере процесс раскрытия сжатой информации для восстановления исходной информации для сигнала, в отношении которого выполняется процесс декодирования линии передачи;
причем сигнал, принимаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом средство обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из получаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что получаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
14. Приемная система, содержащая:
средство обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи; и
средство вывода для вывода изображения или звука на основе сигнала, в отношении которого выполняется процесс декодирования линии передачи;
причем сигнал, принимаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом средство обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из получаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что получаемый сигнал является первым сигналом,
при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
15. Приемная система, содержащая:
средство обработки декодирования линии передачи для выполнения процесса декодирования линии передачи, включающего в себя по меньшей мере процесс демодуляции сигнала, получаемого по линии передачи; и
средство записи для записи сигнала, в отношении которого выполняется процесс декодирования линии передачи;
причем сигнал, получаемый по линии передачи, включает в себя первый сигнал и/или второй сигнал, имеющие отличающуюся друг от друга структуру, за исключением того, что первый и второй сигналы имеют сигнал преамбулы;
при этом средство обработки декодирования линии передачи включает в себя средство получения для получения сигнала преамбулы из получаемого сигнала, средство детектирования для определения значения коррекции получаемого сигнала с использованием получаемого сигнала, и
средство коррекции для коррекции получаемого сигнала с использованием значения коррекции, определяемого средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что получаемый сигнал является первым сигналом, при этом средство коррекции выполнено с возможностью сбрасывать значение, определяемое средством детектирования, если на основе сигнала преамбулы, получаемого средством получения, определено, что принимаемый сигнал не является первым сигналом.
| EP 1367742 A2, 03.12.2003 | |||
| WO 2009060183 A2, 14.05.2009 | |||
| ЦИФРОВАЯ РАДИОВЕЩАТЕЛЬНАЯ ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА И СПОСОБ ОБРАБОТКИ СИГНАЛА В ЭТОЙ СИСТЕМЕ | 2005 |
|
RU2350039C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

