Область техники, к которой относится изобретение
Изобретение относится к области электротехники, и в частности к устройствам релейной защиты и противоаварийной автоматики энергетических сетей с возможностью автоматизированного управления.
Уровень техники
В настоящее время в различных отраслях промышленности широко используются системы сбора, обработки и отображения информации о состоянии объекта, например для энергетических сетей используется оборудование с цифровыми или электромеханическими устройствами релейной защиты (РЗ) и автоматики. Так, известны различные электромеханические и микропроцессорные устройства РЗ и противоаварийной автоматики (ПА) для энергетических сетей. Наиболее близким техническим решением-прототипом является патент на полезную модель RU 87840 U1, опубл. 2009.10.20, где раскрыто микропроцессорное релейное устройство сигнализации, содержащее блок фиксации изменения напряжения и микропроцессорную систему, вторая группа входов-выходов которой является входами-выходами для связи с ПЭВМ и АСУ ТП (Автоматизированная система управления технологическим процессом), при этом введен узел обмена, группа входов-выходов которого соединена с первой группой входов-выходов микропроцессорной системы, группа выходов которой соединена с первой группой входов блока фиксации изменения напряжения, первая группа выходов которого соединена с группой входов узла обмена, вторая группа входов блока фиксации изменения напряжения является группой входов устройства, группа выходов которого является второй группой выходов блока фиксации изменения напряжения, вход микропроцессорной системы является входом квитирования. Однако такое микропроцессорное релейное устройство не обеспечивает высокой надежности, а также оно не достаточно функционально при эксплуатации и облуживании.
Таким образом, существует потребность в преодолении таких недостатков и техническим результатом, на достижение которого направлено предложенное изобретение является, в частности: повышение надежности устройства, расширение функциональных возможностей, сокращение времени наладки и обслуживания, а также в случае неполадок или аварии быстрое нахождение и устранение неполадок устройства без разбора сигнальных цепей и изолирования устройства от управляющих и управляемых объектов.
Сущность изобретения
Предложено устройство контроля и управления сигналами релейной защиты и противоаварийной автоматики энергетических сетей, содержащее микропроцессорный модуль, модуль приема сигналов сигнализаций, модуль выхода сигналов сигнализаций и группу входов и выходов для их соединения с ПЭВМ и АСУ ТП, отличающееся тем, что дополнительно содержит: модуль внешних фильтров, подключенный через соответствующую кросс-плату для релейных модулей, по меньшей мере, к одному релейному модулю, модуль конденсаторных блоков, модуль блока питания, модуль внешней синхронизации часов, которые своими входами-выходами подключены к микропроцессорному модулю, при этом релейные модули снабжены механическими размыкателями с ручным управлением и электронной сигнализацией коммутационного положения размыкателя, которая выведена на лицевую панель устройства и подключена к АСУ ТП для контроля и отключения устройства от входных и выходных цепей.
Отличительной особенностью предложенного устройства от известных микропроцессорных и электромеханических устройств РЗ и ПА, в которых управление входными и выходными цепями выполняется электронным образом, является то, что в предложенном устройстве в цепях входа и выхода дискретных сигналов установлены механические размыкатели с ручным управлением. Использование таких механических размыкателей позволяет при выходе из строя исполнительных электронных компонентов устройства оперативно без разбора сигнальных цепей изолировать панель контроля и управления (ПКУ) от управляющих и/или управляемых объектов, что значительно сокращает время ремонтных работ и упрощает работу с устройством в процессе его наладки и обслуживания. Также установленные в цепях входа и выхода дискретных сигналов механические размыкатели с ручным управлением имеют электронную сигнализацию коммутационного положения размыкателя на лицевой индикаторной панели ПКУ, и посредством подключения устройства к АСУ ТП энергетических подстанций через соответствующую группу входов/выходов интерфейса передачи данных RS-485 выполнены с возможностью ее передачи в систему АСУ ТП. Такое выполнение устройства позволяет персоналу/оператору контролировать положение коммутационных элементов как при эксплуатации, так и при обслуживании, например, при выполнении работ с устройством, перед вводом его в работу оператор имеет возможность дистанционно сравнить положение соответствующих коммутационных элементов с требуемым и разрешить или нет его ввод в работу.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, в которых функциональность модулей определяется конфигурацией их программного обеспечения, является наличие общей конфигурации устройства без привязки к конкретным модулям, а к их позициям. Любой модуль обработки сигналов, установленный в определенную позицию устройства, выполняет строго определенные функции. Поэтому при выполнении ремонтных работ достаточно на место дефектного модуля обработки установить любой другой модуль обработки - новый или уже используемый в системе, но выполняющий менее важные функции, и система сама восстановится, записав в модуль нужную ей конфигурацию, что сокращает сроки проведения ремонтных работ, исключает ошибки конфигурации при восстановлении и сокращает количество запасных частей.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, которые выполняются по индивидуальным схемам, является фиксированная аппаратная структура. Это упорядочивает схемы панелей сигнализаций и пуска-приема дискретных сигналов (команд), позволяя выполнять типовые однородные проекты и технические решения, а также типовые схемы управления и сигнализации. Наращивание предложенного устройства выполняется установкой стандартных модулей с типовой схемой подключения.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, для точной синхронизации записей цифровых регистраторов которых требуются внешние сигналы точного времени, является наличие модуля и режима генерации сигналов точного времени, так что все устройства РЗ и ПА, подключенные к ПКУ, независимо от наличия внешнего источника сигналов точного времени, имеют общую временную сетку. Для этого устройство анализирует состояние входного сигнала синхронизации и при его отсутствии подает на выход синхронизации сигналы от внутреннего тактового генератора. В отличие от синхронизации записей известных устройств РЗ и ПА по протоколу ГОСТ Р 61870-101, точность которых менее 20 мс, предложенное устройство обеспечивает точность синхронизации записей не более 2 мс, 1 мс типовое. Использование модуля внешней синхронизации часов с релейными модулями позволяет синхронизировать время наступления событий и прохождения сигналов в управляющих цепях для их регистрации. Также устройство содержит регистратор передаваемых и принимаемых сигналов с отображением как на лицевой индикаторной панели ПКУ, так и в системе АСУ ТП, что позволяет оперативно контролировать прохождение сигналов в управляющих цепях и выполнять в дальнейшем анализ сигналов в управляющих цепях при разборе аварийных ситуаций.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, для изменения схемы которых требуется либо перепайка, либо компьютерная конфигурация, является возможность оперативной перестройки схем РЗ и ПА применительно к изменениям схемы работы (ремонт, ввод новых линий) за счет имеющихся в ПКУ коммутационных устройств. Кроме того, все действия с ПКУ могут быть стандартизированы, обеспечивая контролируемость действий с устройствами РЗ и ПА и обеспечивая оперативность отображения действий и информации о состоянии в системе АСУ ТП.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, которые имеют ограниченную функциональность, является использование многофункциональности устройства, а именно программным образом определяемая функциональность и интеллектуальная цифровая обработка передаваемых и принимаемых сигналов команд и управляющих воздействий, повторяемость параметров во времени и различных условиях эксплуатации, автоматические в реальном времени самоконтроль и самодиагностика функционирования; а также признаков программируемых логических контроллеров: жесткая логическая модульная организация и высокое быстродействие.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, которые имеют жесткую функциональную связь между входными и выходными сигналами устройств, у которых блоки свободно конфигурируемой логики (СКЛ) служат для изменения функциональности устройства, является наличие СКЛ в цепях обработки входных и выходных сигналов, что позволяет изменять их параметры передачи, например надежность и безопасность, или изменять пути передачи сигналов в зависимости от состояния, подключаемого к устройству оборудования. Для этого в логику работы предложенного устройства включаются до 8 входных сигналов от внешних устройств, например сигналов аварийной сигнализации. В предложенном устройстве имеется 16 блоков СКЛ, соответственно по одному для каждых 8 первых входных/выходных сигналов. Для 8 входных сигналов действует одноуровневая 8 входовая И, ИЛИ, НЕ логика. Для каждого из 8 выходных сигналов действует трехуровневая 8 входовая И, ИЛИ, НЕ логика с двумя программируемыми таймерами. Блоки СКЛ могут каскадироваться. С помощью СКЛ также реализуются специальные режимы работы с аппаратурами различных производителей или компенсирующие недостатки их функционирования и логики работы или расширяющие имеющуюся функциональность.
Отличительной особенностью предложенного устройства от известных устройств РЗ и ПА, в которых внутренние шины передачи сигналов являются потенциальными, а значит могут подвергаться воздействию паразитных сигналов при действии на устройство мощных импульсных помех, внутренние шины предложенного устройства являются модулированными кодированными. Решение о приеме сигнала принимается только после обработки заданной входной последовательности. Остальные сигналы игнорируются, что обеспечивает приоритет безопасности над надежностью.
В предложенном устройстве во входных цепях передаваемых сигналов используются программные команды функции фиксированного сдвига, которая не позволяет изменять состояние выходных цепей быстрее заданного времени от их предыдущего изменения состояния, что позволяет избежать коллизий переключения кодовых комбинаций в цепях передачи устройств передачи сигналов - команд противоаварийной автоматики (УПАСК). Также во входных цепях передаваемых сигналов используются команды функции удержания минимальной длительности, которая не позволяет изменять состояние сигналов на входе передатчика УПАСК быстрее заданного времени от их предыдущего изменения состояния. Это устраняет не срабатывание приемника УПАСК при работе УПАСК в пограничных состояниях (по вероятности ошибки или по низкому отношению сигнал-шум), когда большая часть времени существования сигнала в канале/линии занимается обработкой принимаемых сигналов или время обработки сигнала превышает время существования сигнала в канале/линии. В выходных цепях передаваемых сигналов используются команды функции удержания минимального периода повторения сигналов, которая не позволяет изменять состояние выходных цепей быстрее заданного времени от их предыдущего изменения состояния, что устраняет не восстановление приемника УПАСК при работе УПАСК в пограничных состояниях (по вероятности ошибки или по низкому отношению сигнал-шум), когда время отсутствия сигнала в канале/линии становится меньше времени обработки сигнала приемником. В предложенном устройстве на входе цепей приема используются команды функции выдержки срабатывания, что позволяет исключить ложные срабатывания управляемых устройств в пограничных режимах работы УПАСК (по вероятности ошибки или по низкому отношению сигнал-шум). В выходных цепях принимаемых сигналов используются команды функции ограничения минимальной длительности, которая не позволяет изменять состояние выходных цепей быстрее заданного времени от их предыдущего изменения состояния, что устраняет не срабатывание исполнительных устройств со временем срабатывания, большим длительности управляющих сигналов. Также в выходных цепях принимаемых сигналов используются команды функции ограничения минимального периода повторения сигналов, которая не позволяет изменять состояние выходных цепей быстрее заданного времени от их предыдущего изменения состояния, что устраняет не восстановление исполнительных устройств со временем восстановления, большим паузы между управляющими сигналами.
В предложенном устройстве имеется три независимых шины электропитания: устройства, цепей приема и цепей передачи сигналов, что позволяет в процессе эксплуатации оперативно выводить из работы соответствующие направления распространения сигналов команд и управляющих воздействий. Также устройство содержит встроенные восстанавливаемые источники питания (модуль блока питания и модуль конденсаторных блоков), позволяющих выдерживать более 500 мс 100% отсутствие напряжения оперативного тока (электропитания) без изменения параметров функционирования и при полном длительном обесточивании устройства сохранять и просматривать служебную информацию о функционировании устройства на момент аварии в течение более 7 дней.
В предложенном устройстве все соединения выполнены печатными проводниками, что позволяет в отличие от других известных устройств РЗ и ПА, в которых соединения между компонентами выполняются проводами и кабелями, конструктивно упорядочить схемы промежуточных панелей РЗ и ПА, что обеспечивает компактность системы, дополнительно повышает надежность работы устройства и снижает трудозатраты на монтаж и обслуживание.
Эти и другие конструктивные особенности и преимущества предложенного изобретения станут очевидными из детального описания вариантов конструкции, которое должно читаться совместно с сопроводительными чертежами.
Краткое описание чертежей
На фиг.1 представлена структурная блок-схема предложенного устройства контроля и управления сигналами релейной защиты и противоаварийной автоматики энергетических сетей.
На фиг.2 представлена блок-схема микропроцессорного модуля.
На фиг.3 представлена блок-схема релейного модуля.
На фиг.4 представлена блок-схема модуля кросс-платы процессора.
На фиг.5 представлен модуль внешних фильтров.
На фиг.6 представлен модуль блока питания.
На фиг.7 представлен модуль конденсаторных блоков.
На фиг.8 представлен модуль выходов сигналов сигнализации.
На фиг.9 представлен модуль дистанционного сброса.
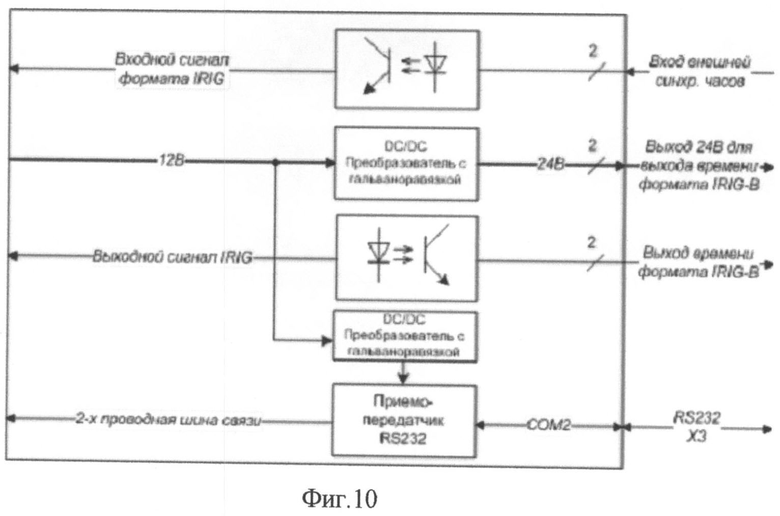
На фиг.10 представлен модуль внешней синхронизации часов.
На фиг.11 представлен модуль приема сигналов сигнализации.
На фиг.12 представлен модуль кросс-платы релейных модулей.
Подробное описание изобретения
Устройство контроля и управления сигналами релейной защиты и противоаварийной автоматики энергетических сетей показано на фиг.1 и содержит: кросс-плату процессора, к которой своими входами-входами подключены: микропроцессорный модуль с центральным процессором (МЦП), модуль конденсаторных блоков (МКБ), модуль блока питания (МБП), модуль внешней синхронизации часов (МВСЧ), модуль приема сигналов сигнализации (МПСС), модуль дистанционного сброса (МДС), модуль выходов сигналов сигнализации (МВС) и ПК (ПЭВМ) и АСУ ТП, при этом микропроцессорный модуль второй группой входов-выходов подключен, по меньшей мере, к одной кросс-плате релейных модулей (МКПР1 и МКПР2), к которой подключены соответствующие релейные модули (РМ), также содержится модуль внешних фильтров (МВФ), подключенный своими выходами к каждой кросс-плате релейных модулей.
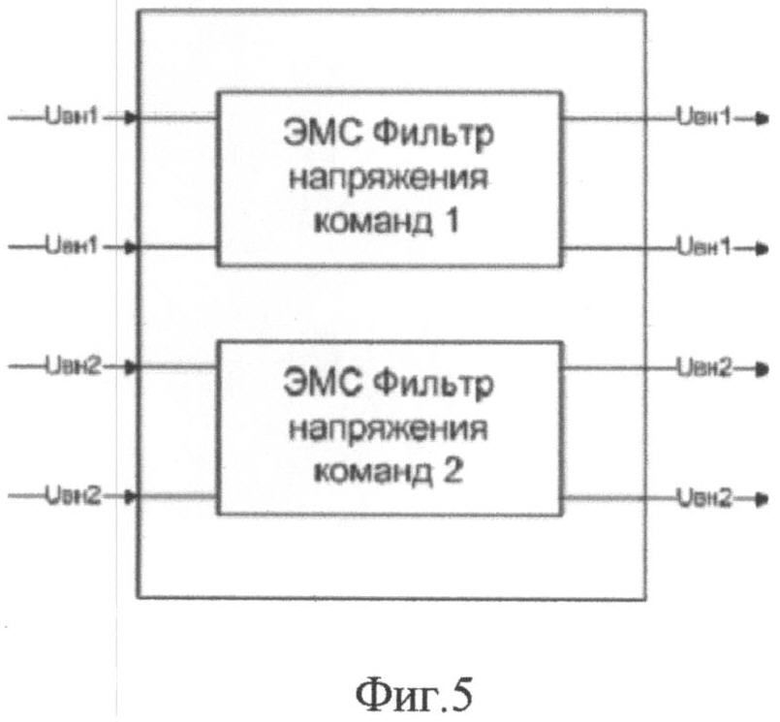
Модуль внешних фильтров (МВФ) состоит из двух фильтров напряжения команд для фильтрации оперативного тока постоянного напряжения от высокочастотных электромагнитных помех, подаваемого на выходы ПРД (передача) команд (Uвн1) и входы ПРМ (прием) команд (Uвн2) релейных модулей (РМ), т.е. раздельно для цепей приема и передачи.
Модуль выходов сигнализации (МВС) через свой буфер шины контроля и управления осуществляет: выдачу выходной команды подтверждения срабатывания ПРД, выдачу выходной команды подтверждения срабатывания ПРМ, выдачу 4-х сигналов сигнализаций, выдачу 2-х сигналов аварий. Характеристики МВС: тип выдачи команд и сигналов: НО/НЗ, тип выхода всех сигнализаций, кроме аварии 2: электромеханическое реле с механической блокировкой (с принудительным сбросом); тип выхода аварии 2: электромеханическое реле без механической блокировки.
Модуль дистанционного сброса (МДС) через свой буфер шины контроля и управления и фильтр осуществляет: дистанционный сброс (переход в первичное (нормальное) состояние) сигналов и светодиодов Сигнализаций, дистанционный сброс сигналов и светодиодов аварий, дистанционный сброс выхода и светодиода подтверждения срабатывания ПРД, дистанционный сброс выхода и светодиода подтверждения срабатывания ПРМ. Характеристики МДС: выбор диапазона напряжения команды сброса перемычками, диапазоны напряжения команды сброса 220В, 110В, 48В, по току, входной ток каждого канала 20 мА.
Модуль внешней синхронизации часов (МВСЧ) предназначен для синхронизации записей регистратора, внутренних часов реального времени с сигналами точного времени, например, от системы глобального позиционирования (GPS) и синхронизации других устройств от внутренних часов ПКУ.
Модуль приема сигналов сигнализации (МПСС) через фильтр, схему выбора порога срабатывания и буфер шины контроля и управления предназначен для приема 8-ми сигналов сигнализации и их вывода.
Лицевая индикаторная панель индикации и управления (ПКУ) предназначена для управления устройством и отображения оперативной информации и состоит из: кнопок управления, предназначенных для установки режимов работы устройства; светодиодов сигнализации, назначение которых соответствует функциональной схеме устройства и приведено в виде надписей на лицевой панели корпуса устройства. Также индикаторная панель обеспечивает: отображение режимов работы устройства, номер канала, результаты самодиагностики, отключение звуковой сигнализации и квитирование сигналов, ввод и изменение конфигурации, тестирование устройства и др. ПКУ СР24 имеет следующие внешние подключения: питание ПКУ, оперативный ток для ПРД и ПРМ команд, входы и выходы команд ПРД и ПРМ, входы и выходы сигнализаций и аварий, дистанционный сброс сигнализаций и аварий, мониторинг АСУ ТП через интерфейс RS485, синхронизация IRIG-B, а также внутренние подключения - межблочная шина управления. Микропроцессорная система ПКУ регистрирует и сохраняет информацию о событиях, прохождение сигналов в управляющих цепях, сигналов сигнализации положения механического размыкателя, время приема и передачи сигналов с их отображением, производит программную регулировку выдержек времени на пуск каждого входа/выхода, позволяет проводить дистанционное тестирование конфигурации и взаимодействовать с АСУ ТП по различным интерфейсам RS485 или RS232.
Кросс-платы релейных модулей (МКПР1 или МКПР2) через шину управления релейными модулями (ШРУМ) и внешнюю ШРУМ для связи друг с другом осуществляют: обработку сигнала команд или управляющих воздействий - разветвление внешней шины управления релейных модулей для обеспечения обмена сигналами управления между всеми модулями блока релейных модулей, организацию нумерации релейных модулей, размножение принимаемых сигналов, защиту от электромагнитных помех, сигнализацию.
Микропроцессорный модуль (МЦП) показан на фиг.2. Он содержит: внешнюю энергонезависимую память, соединенную с микроконтроллером, который соединен шинами данных с буфером шины контроля и управления, а также буфером внешней шины управления (ШУ1), энергонезависимую память, предназначенную для хранения параметров (времени и идентификаторов) аварийных событий, установок и внутренней конфигурации устройства и функциональной схемы и других параметров. Также МЦП содержит: фильтр электромагнитной совместимости (ЭМС) в интерфейсе RS-485 и/или RS-232 и преобразователь постоянного тока DC для подачи питания на микроконтроллер и буфер шины контроля и управления. Использование фильтров ЭМС позволяет защитить различные модули устройства как от внутренних, так и от внешних помех (осуществляют электрическую развязку помех на «землю») и предотвращает распространение помех по печатным проводникам, не нарушая работы устройства. Фильтры ЭМС реализуются на базе конденсаторов, а также LC- или RC-цепей. Основные элементы L4 типа В82790, VD37, VD38 и VD39 типа 1.5КЕ.
Схема питания организована посредствам двойного преобразования вторичного питания +12В, выполненного на микросхеме D1 типа МС7805 в +5В, и стабилизации напряжения питания +5В на микросхеме D2 типа МАХ1724. Примененный ионистор С51 типа EEC-S5R5V увеличивает время работы цифровой части устройства даже при пропадании вторичного напряжения до уровня 0 В. Стабилизированное напряжение позволяет повысить эффективность работы устройства путем рационального использования энергии, накопленной в модуле МКБ, т.е. работоспособность схемы сохраняется при уменьшении вторичного напряжения до 1 В. Кроме этого, применение ионистора позволяет при 100% пропадании первичного напряжения завершить все процессы без сбоев: сохранение всех событий в энергонезависимой памяти.
Микроконтроллер DD1 типа AT89C51ED2 выполняет обработку поступающих сигналов команд с релейных модулей, МДС, МПСС и МКПП и выдачу дискретных сигналов в модули МВС, МКПП и РМ. Микроконтроллер содержит код, позволяющий выполнять все функции устройства.
Внешняя энергонезависимая память выполнена на микросхеме D4 типа АТ24С256. При возникновении какого-либо события микроконтроллер DD1 по интерфейсу I2C (DO/DI - двунаправленная линия данных и CLK - синхронизация) записывает данные в память в соответствии с определенной структурой посылки. А также при запросе данных по этим же линиям микроконтроллер считывает сохраненные данные.
Буфер внешней шины управления ШУ1 выполняет буферизацию сигналов обмена между микроконтроллером DD1 и релейными модулями РМ. Он состоит из дискретных сигналов выбора адреса РМ, дискретного сигнала запроса релейным модулем инициализации, дискретного сигнала общего опроса, интерфейсных сигналов SPI (Rx - прием сигнала, Tx - передача сигнала, CLK - сигнал синхронизации) и питающего вторичного напряжения +12В. Все сигналы, кроме питающего вторичного напряжения +12В, проходят через двунаправленные не инвертирующие буфера D22 и D23 типа 74АТВ245 и 74АТВ244 соответственно. Входы буфера D23 имеют дополнительную защиту от помех в виде резисторов типоразмера 0805 и защитных диодов типа BAT54S. Применение этой защиты позволяет производить установку, замену или удаление модуля без выключения питания всего устройства.
Буфер шины контроля и управления позволяет обмениваться дискретными сигналами сброса с модулем МДС и МКПП, дискретными сигналами выходов сигнализаций с модулем МВС через модуль МКПП, контроля вторичного питания +12 с модуля МКБ через модуль МКПП, резервным питанием для светодиодов (Резерв) и интерфейсными сигналами SPI (Rx - прием сигнала, Tx - передача сигнала, CLK - сигнал синхронизации) с модулем МКПП.
Сигналы обмена дискретными сигналами сброса поступают из модуля МКПП и проходят через двунаправленный не инвертирующий буфер D15 типа 74АВТ245, и с выхода D15 данные сигналы поступают в микроконтроллер DD1. Дискретные сигналы выходов сигнализаций формируются микроконтроллером DD1 в соответствии с заданной конфигурацией всего устройства и поступают на вход двунаправленного не инвертирующего буфера D13. Сигналы с выхода D13 поступают на внешний разъем XI типа DIN41612. Для ввода остальной информации (контроль вторичного питания +12 и интерфейсные сигналы SPI) используются не инвертирующие буфера D16 и D17 типа 74АВТ245 и 74АВТ244 соответственно. С другой стороны буфера D16 и D17 подключены к разъему X1. Сигнал резервного питания для светодиодов (Резерв) используется для автономного отображения наличия соответствующего события, на которое программно настроены светодиоды на модуле МКПП. Данный сигнал поступает с разъема X1 на схему управления СИД Сигнализаций и Аварий и на внешнюю шину управления (ШУ).
Схема управления СИД Сигнализаций и Аварий предназначена для отображения на светодиодах модуля МКПП соответствующих событий. Основная особенность, заложенная в данной схеме, состоит в применении в качестве управления бистабильных реле типа DS2Y-SL2 со схемой сброса и установки. Это позволяет полностью контролировать выходные события сигнализаций за счет того, что сброс данных реле не может быть выполнен отключением питания. Таким образом, при срабатывании сигнализации данное ее положение запоминается до местного (на модуле МКПП) или удаленного (на модуле МДС) сброса, что позволяет полностью соответствовать отраслевым требованиям ОАО «ФСК ЕЭС», заменяя используемые в настоящий момент для этих целей блинкера, увеличивая надежность и долговечность выполнения данной функции. Для установки срабатывания соответствующего светодиода после его программной обработки с микроконтроллера DD1 сигнал поступает на схему установки выхода, выполненную на интегральной микросхеме D27, состоящей из элементов ИЛИ-НЕ. С выхода через токоограничивающий резистор R46 сигнал поступает на управляющий транзистор VT5 типа ВС847 и открывает транзистор. Протекающий через данный транзистор ток обеспечивает срабатывание «устанавливающей» обмотки реле К3, т.е. переключает реле в положение «включить команду», и подает ток на соответствующий светодиод. При подаче сигнала сброса и отсутствии условия срабатывания данной сигнализации, сигналы сброса поступают на микросхему D25 типа 74НС11 для формирования единого сигнала сброса от всех источников. С выхода D25 сигнал поступает на один из элементов микросхемы D27 и далее через токоограничивающий резистор R49 на транзистор VT6 типа ВС847. В коллекторную цепь данного транзистора последовательно подключена «сбрасывающая» обмотка реле К3, обеспечивающая переключение реле в исходное состояние (Сброс) и выключающая соответствующий светодиод. Светодиоды для отображения сигнализаций расположены на модуле МКПП, а сигналы с контактов реле поступают на разъем X1.
На фиг.3 показана блок-схема релейного модуля (РМ), который осуществляет: контроль и управление приемом и выдачей ПРД и ПРМ команд; внешнюю/внутреннюю регистрацию положения ключей, отображение получения ПРД и ПРМ команд, отображение наличия питающего напряжения «+5В», оперативного тока для команд Uвн1 и Uвн2, отображение аварии модуля, управление сбросом светодиодов ПРД и ПРМ, местное тестирования светодиодов ПРД, ПРМ и авария. Конструктивно каждый из модулей реле выполнен печатными проводниками и установленным на нем разъемным клеммным соединителем для подключения внешних цепей.
Входной сигнал ПРД команды через клеммы Вход ПРД Релейного модуля (РМ) поступает на механический разъединитель S1 (контакты 1 и 2). Контакты 3 и 4 разъединителя S1 соединены с контактами 1, 2 и 3 клеммы Q1. Выход S1 РМ служит для индикации положения разъединителя S1 во внешних регистраторах. Одновременно контакты 3 и 4 S1 подключены к микропроцессору (МП) РМ для отображения состояния разъединителя S1 в системе регистрации событий ПКУ и передаче этой информации в систему АСУ ТП. В качестве разъединителя S1 могут использоваться двухгруппные поворотные ключи типа A019409FL или рокерные выключатели типа SWR45.
Сигнал ПРД команды с разъединителя S1 поступает на ЭМС фильтр, состоящий из резистора, диодов и конденсаторов. В качестве токоограничивающего резистора могут использоваться проволочные сопротивления R1 и R2 типа SQP5, в качестве диодов VD1 и VD2 - диоды Шотки типа 1.5КЕ, конденсатор C1 - высоковольтный керамический конденсатор типа РМЕ271. Диоды одновременно выполняют функцию селектора полярности управляющего сигнала ПРД команды - работа системы ПКУ осуществляется только по управляющим сигналам положительной полярности.
Сигнал ПРД команды с ЭМС фильтра поступает на схему выбора порога срабатывания, состоящую из трех стабилитронов, перемычек и управляемого генератора тока. С помощью перемычек составляются комбинации из 1-3 стабилитронов, задающих те или иные уровни стабилизации (порогов срабатывания). При превышении входным ПРД сигналом установленного уровня стабилизации, через управляемый генератор тока начинает протекать ток. В качестве стабилитронов могут использоваться стабилитроны VD5, VD6 и VD7 типа 1N53 с напряжениями срабатывания 160, 80 и 36В. В качестве перемычек X5 - джамперы типа артикула 531230-3. Управляемый генератор тока VT1 может быть типа IXCY10M.
Сигнал с генератора тока поступает на интегральную оптронную пару D1 типа SFH6156. Порог включения оптического источника оптронной пары устанавливается с помощью резистора R4. Вторым резистором R5 устанавливается коэффициент передачи оптической пары (коэффициент преобразования фототок-напряжение).
Таким образом, только при заданном напряжении и токе управляющего сигнала ПРД на выходе оптрона появляется напряжение, достаточное для срабатывания логического входа микроконтроллера D10 релейного модуля (РМ). Аналогичным образом построена схемотехника входа ПРМ. РМ содержит 2 типа релейных выходов: твердотельный и электромеханический. Твердотельный используется для выдачи команд РЗ и ПА на устройства передачи команд со временем срабатывания менее 1 мс. Электромеханические выходы используются для выдачи команд, пришедших с аппаратуры приемопередачи, на исполнительные устройства. Применение разных типов выходов позволяет достичь соответствующих характеристик по времени срабатывания и мощности переключения.
Выдача сигнала управления на срабатывание выхода ПРД осуществляется с микроконтроллера D10 на управляющий вход твердотельного реле D4 типа G3VM-601EY. При этом замыкаются контакты данного реле, что способствует протеканию тока через контакты D4, и цепь замыкается. В схеме выдачи команд на выход ПРД применяется токоограничивающий ключ VT3 типа IXCY10, который служит предохранителем в случае короткого замыкания на выходе нагрузки для защиты всего выхода ПРД. Выходной ЭМС фильтр выполнен аналогично входу. На резисторах R14, R15 типа SQP5, защитных диодах VD12, VD13 типа 1,5КЕ и варисторе V2 типа CU4032K. Для уменьшения монтажа, при подачи опертока для срабатывания промежуточных реле исполнительных устройств, на модуле предусмотрена конфигурация подачи внутреннего опертока для команд. Конфигурация установки опертока осуществляется джамперами SW16 и SW17 типа артикула 531230-3. Возможно как подключение данного внутреннего опертока, так и его отключение, в случае использовании внешнего опертока для команд. Внешнее подключение исполнительных промежуточных реле (цепей) осуществляется к контактам 1 и 2 разъема Q2 типа MDSTB2,5.
Входная схема входа ПРМ построена аналогично входу ПРД и предназначена для обработки команд, пришедших с устройств приемопередачи. Отличие состоит в возможности конфигурации использования внутреннего или внешнего опертока с помощью джамперов SW14 и SW15 типа артикула 531230-3. Выдача команды на ПРМ выход осуществляется микроконтроллером D10 после обработки входных сигналов в соответствии с заданной программной конфигурацией всего устройства. Сигнал с выхода D10 поступает через токоограничивающий резистор R29 на транзистор VT5, который управляет включением/выключением реле К1 типа DE1a1b. При подаче сигнала на срабатывания выходные замыкающие контакты реле К1 замыкаются, обеспечивая протекание тока через нагрузку. Последовательно с выходной цепью ПРМ установлен токоограничивающий резистор R27 типа KNP200, обеспечивающий защиту контактов реле от бросков тока при переключении. В цепи с выходной цепью ПРМ последовательно установлен механический разъединитель S3 типа A019409FL (контакты 1 и 2). Контакты 3 и 4 разъединителя S3 соединены с контактами клеммы Q3 типа MDSTB2,5. Контакты 3 и 4 выхода S3 РМ служат для индикации положения разъединителя S3 во внешних регистраторах. Одновременно контакты 3 и 4 S3 подключены к микропроцессору (МП) РМ для отображения состояния разъединителя S3 в системе регистрации событий ПКУ и передачи этой информации в систему АСУ ТП.
Схема контроля наличия опертока Uвн1 и Uвн2 предназначена для визуального контроля оператором наличия опертока команд по выходу ПРД (Uвн1) и по входу ПРМ (Uвн2). Она состоит из токового ключа VT9 и VT10 типа IXCY10, токоограничивающего резистора R89 и R90 типоразмера 1206, защитного диода VD34 и VD34 типа 1N47 и элемента индикации AL3 и AL4 типа LA93. Оперток Uвн1 поступает с разъема Q5 на вход ПРД и параллельно на схему контроля Uвн1 на токовый ограничитель. На выходе VT9 установлен защитный диод VD34 для защиты от помех и сигнал через токовый ограничитель R89 поступает на элемент индикации - светодиод AL3. Аналогично построена и схема контроля Uвн2.
Для отображения состояния модуля установлены светодиоды «Авария», «ПРД» и «ПРМ», выполненные на элементах AL1, AL5 и AL6 типа LA93. При возникновении сбоев работы РМ микропроцессор выдает сигнал Аварии на элемент индикации. При приходе команд «ПРД» или «ПРМ» загорается соответствующий светодиод. Данные светодиоды выполнены аналогично схеме управления СИД Сигнализаций и Аварий в модуле МЦП. В случае прихода команды светодиод загорается и запоминается его состояние до ручного (на модуле МКПП) или удаленного (на модуле МДС) сброса. К элементам управления также относятся кнопки «Сброс» и «Тест» SW10 и SW11 соответственно. Сигнал от этих кнопок поступает на микропроцессор и на схему сброса светодиода.
Обмен с модулем МЦП осуществляется посредством ШУ и модулей МКПР1 или МКПР2. С модуля МКПР1 или МКПР2 поступают дискретные сигналы выбора адреса РМ, дискретного сигнала запроса релейным модулем инициализации, дискретного сигнала общего опроса, интерфейсных сигналов SPI (Rx - прием сигнала, Tx - передача сигнала, CLK - сигнал синхронизации) и питающего вторичного напряжения +12В. Все сигналы, кроме питающего вторичного напряжения +12В, проходят через двунаправленные не инвертирующие буфера D20 и D25 типа 74АТВ244. Входы буфера D25 имеют дополнительную защиту от помех в виде резисторов типоразмера 0805 и защитных диодов типа BAT54S. Применение этой защиты позволяет производить установку, замену или удаление модуля без выключения питания всего устройства. По интерфейсу SPI осуществляется обмен состоянием РМ, командами, состоянием органов управления, контроля и индикации, состоянием входов и выходов данного модуля. Обработка сигналов, поступающих на микроконтроллер, осуществляется в зависимости от установленной конфигурации, переданной по SPI, для данного модуля.
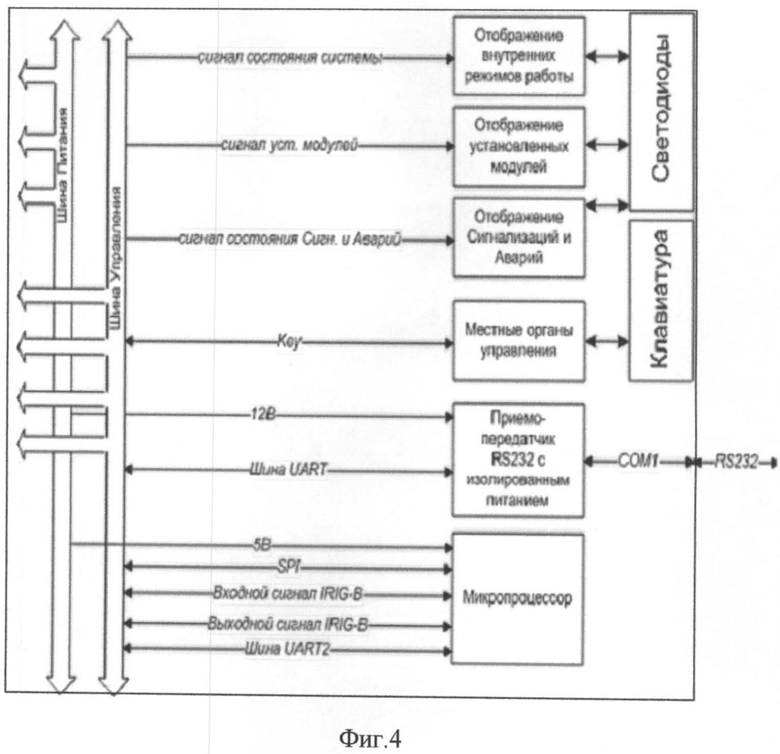
На фиг.4 показан модуль кросс-платы процессора (МКПП), который осуществляет: обмен сигналами управления между всеми модулями блока управления, отображение состояний выходов подтверждения срабатывания ПРД и ПРМ, сигнализаций и аварий, отображение наличия питающего и резервного питания, отображение аппаратной аварии ПКУ, отображение установленных релейных модулей, обработку сигналов органов управления (кнопки на блоке управления), организацию интерфейса обмена по интерфейсу RS232, обработку сигналов точного времени.
МКПП получает дискретные сигналы с модулей МППС, МДС, МВС, МЦП, а также сигналы по интерфейсу UART (Rx (прием сигнала) и Tx (передача сигнала)) с модуля МВСЧ, Сигналы по интерфейсу SPI (Rx (прием сигнала), Tx (передача сигнала), CLK (сигнал синхронизации) и CS (выбор кристалла)) с модуля МЦП, передает дискретные сигналы в модули МВСЧ, МВС, МЦП. Кроме этого, принимает сигналы питания +12В с модуля МБП и выдает его в модуль МКБ для удержания работы аппаратуры в случае пропадания внешнего питания, принимает сигнал питания с модуля МКБ и выдает его на модули МЦП (для преобразования в другой номинал вторичного напряжения +5В), МВС (для опертока для срабатывания выходных реле), МПСС (для преобразования в другой номинал вторичного напряжения +24 В). На разъем X10 поступают сигналы питания +12В. Через модуль МКПП данный сигнал передается в модуль МКБ через разъем X11 для обработки.
Сигнал питания +12В после обработки в модуле МКБ поступает на разъем X11 и поступает на разъемы X5 (модуль МДС), X7 (модуль МВС), X8 (модуль МЦП), X12 (модуль МВСЧ), X14 (модуль МПСС). Сигнал питания +5В для питания цифровых микросхем поступает с разъема X8 и, кроме питания цифровой части схемы, поступает на разъемы X5, X7, X12, X14 в качестве источника питания модулей МДС, МВС, МВСЧ и МПСС.
Схема отображения внутренних режимов работы. Дискретные сигналы индикации выходов сигнализаций поступают через разъем X8 и идут непосредственно на светодиодную индикацию AL1, AL2, AL15, AL16, AL17, AL18, AL32, AL33 типа L-53 через токоограничивающие резисторы типоразмера 0805. С разъема X11 сигнал +12В поступает на схему отображения наличия вторичного напряжения питания, состоящую из последовательно включенного токоограничивающего резистора R111 типоразмера 0805 и светодиода AL35 типа L-53. С разъема X11 поступает сигнал резервного питания и передается на разъем X8 (модуль МЦП) и X7 (модуль МВС), а также на схему отображения наличия резервного питания, состоящую из преобразователя на микросхеме D27 и светодиода AL34 типа L-53 с последовательно включенным токоограничивающим резистором типоразмера 0805. С разъема X8 сигнал Аварии поступает на двунаправленный не инвертирующий буфер D15 типа 74АВТ245 и затем на последовательно включенный токоограничивающий резистор R38 типоразмера 0805 и светодиод AL19 типа L-53.
Схема отображения установленных модулей. Дискретные сигналы для отображения модулей поступают через разъем Х8 на схему декодирования. Для декодирования используется 8 адресных сигналов Data_inl…Data_in8 и 3 сигнала выбора кристалла (CS1, CS2 и CS3). Сигналы Data_inl…Data_in с разъема поступают на двунаправленный не инвертирующий буфер D11 и D15 типа 74АВТ245. С выхода буферов D11 и D15 Адресные сигналы поступают параллельно на входы трех триггерных регистров. Выбор отображения осуществляется с помощью 3-х сигналов выбора кристалла. При подачи сигнала выбора кристалла на 1-ый триггерный регистр (уровень логического «нуля») сигнал Data_inl…Data_in8 поступает на выход микросхемы D16 типа 74НС374. При подаче сигнала выбора кристалла на 2-ой триггерный регистр (уровень логического «нуля») сигнал Data_inl…Data_in8 поступает на выход микросхемы D17 типа 74НС374. При подаче сигнала выбора кристалла на 3-ий триггерный регистр (уровень логического «нуля») сигнал Data_inl…Data_in8 поступает на выход микросхемы D18 типа 74НС374. Сигнал с выходов триггеров D16, D17 и D18 через токоограничивающие резисторы поступает на светодиоды AL3-AL14 и AL20-AL31 типа L-53.
Схема отображения сигнализаций и Аварий. Дискретные сигналы для отображения сигнализаций и Аварий поступают с разъема Х8 через токоограничивающие резисторы на светодиоды AL1, AL2, AL15-AL18, AL32 и AL33 типа L-53.
Местные органы управления. Дискретные сигналы с клавиатуры («Сброс ПРД1», «Сброс ПРМ», «Сброс Сигнализаций», «Сброс Аварий», «Тест ПРД», «Тест ПРМ») поступают с разъема на разъем X1 на двунаправленный не инвертирующий буфер D12. С выхода D12 сигналы поступают на разъемы X7 (установка модуля МВС) и X8 (установка модуля МЦП).
Приемопередатчик RS232/RS485 с изолированным питанием. Интерфейсная схема RS-485 и RS-232 состоит из специализированных преобразователей, обеспечивающих диагностику, помехозащищенность и передачу данных на ПЭВМ или АСУ ТП. Интерфейсные сигналы UART (универсального асинхронного приемопередатчика) Rx (прием данных), Tx (передача данных) и CTS (разрешение передачи) и Interface (тип подключенного интерфейса) поступают с разъема X8 на двунаправленный не инвертирующий буфер D12 типа 74АВТ245 и D15. Схема преобразователя состоит из гальвано развязывающих оптронов D2, D3, D4 и D23 типа SFH6156-3T, гальвано изолированного DC/DC преобразователя D5 типа P6IU-1205E, микросхемы выбора типа используемого интерфейса D7 типа 74АВТ244, преобразователя интерфейса UART/RS232 - D9 типа SP232EEN, преобразователя интерфейса UART/RS485 - D10 типа ADM483EAR и внешнего разъема X2 типа IDC-10. Питание цифровой части осуществляется путем преобразования вторичного питания +12В в гальвано изолированное питание +5В. Сигналы управления CTS и Interface и сигналы интерфейса изолированы от основной схемы гальвано развязывающими оптронами D2, D3, D4 и D23.
На модуле установлен микропроцессор D20 типа AT89C51ED2, который обрабатывает сигналы точного времени и выдает сигналы точного времени в формате IRIG-B, поступающие с разъема и на разъем X12, обрабатывает сигналы входной сигнализации, поступающие с разъема X14, и обменивается информацией с модулем МЦП через разъем X8.
Входной и выходной дискретный сигнал IRIG-B поступает через двунаправленный не инвертирующий буфер D22 типа 74АВТ244 на разъем X12. Дискретные сигналы входов сигнализаций поступают с разъема X14 на двунаправленный не инвертирующий буфер D14 типа 74АВТ245. С выхода D14 сигналы поступают на микроконтроллер D20, в котором проходят обработку и выдаются по интерфейсу SPI на разъем X8. Интерфейс SPI состоит из 3-х сигналов MOSI (принимаемые данные), MISO (передаваемые данные), SCL (синхронизация потока) и сигнала CS (разрешения работы шины). Все сигналы с микросхемы D20 поступают на двунаправленный не инвертирующий буфер D13 типа 74АВТ244 и затем на разъем X8.
На фиг.5 показан модуль внешних фильтров (МВФ), который предназначен для фильтрации напряжения, которое может использоваться для выхода сигналов ПРД команд и входа сигналов ПРМ команд релейных модулей РМ. Данный модуль состоит из ЭМС фильтров напряжения команд F1 и F2 типа В84110. Оперток подается на входы X1-X2 и X3-X4 и поступает на фильтр F1 и F2. Конструкция фильтра позволяет осуществлять отвод помех по земляной шине. С выхода фильтров опертоки подаются на выходные клеммы X5-X6 и X7-X8 для подачи их на Uвн1 и Uвн2 модулей МКПР1 и МКПР2.
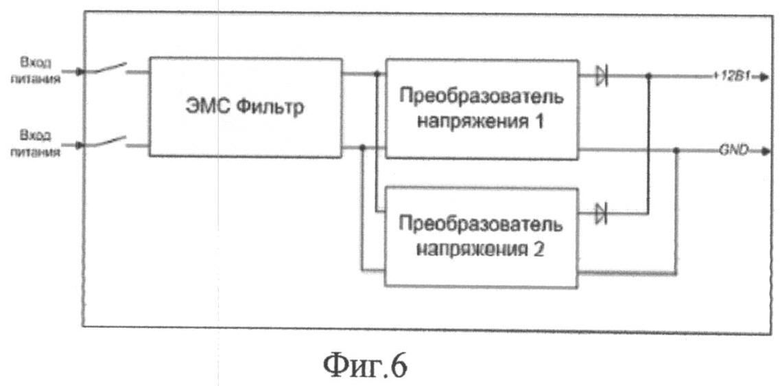
На фиг.6 показан модуль источника питания (МБП), предназначенный для преобразования первичного внешнего напряжения во вторичное напряжение +12В. МБП - универсальная система питания устройства, дробная схема резервирования, защита от перегрузки по току, напряжению и температуре, защита от электромагнитных помех. МБП состоит из входного фильтра и параллельно подключенных к нему двух преобразователей напряжения. Модуль блока питания может работать от источника переменного или постоянного тока и обеспечивает стабилизированные уровни напряжения для работы всего устройства.
Первичное напряжение поступает на входные клеммы X1 и X2 типа TA-MR1. Затем входное напряжение поступает на выключатель питания SW1 типа SWR-45-R. Выключателем обеспечивается включение/выключение (обесточивание) устройства. С выхода выключателя первичное напряжение поступает на ЭМС фильтр, выполненный на варисторах V1, V2 и V3 типа S14K и ЭМС фильтр F1 типа В84110. Данная дополнительная защита позволяет поднять степень защиты устройства до степени жесткости 4 по ГОСТ Р 51317.6.5-2006, ГОСТ Р 51317.4.5, ГОСТ Р 51317.4.6, ГОСТ Р 51317.4.12, ГОСТ Р 51317.4.16. Применение 2-х преобразователей напряжения питания, работающих в горячем резерве, повышает надежность системы питания за счет резервирования и работы данных преобразователей на нагрузку менее 50%. В случае возникновения отказа одного из источников второй выдает мощность, достаточную для работы всего устройства. В качестве преобразователей D1 и D2 применяются DC/DC преобразователи типа KAMN30, способные полнофункционально работать при входном рабочем диапазоне напряжений от 80 до 370 В постоянного тока и от 85 до 264 В переменного тока. Объединение вторичного напряжения элементов D1 и D2 выполнено через диоды VD1 и VD2 типа MURS360, которые обеспечивают развязку вторичных напряжений элементов D1 и D2 друг от друга в случае выхода из строя одного из преобразователей. Общее выходное стабилизированное вторичное напряжение +12В поступает на разъем X3.
На фиг.7 показан модуль конденсаторных блоков (МКБ), который состоит из схем контроля напряжения питания и контроля заряда резервного питания, подключенных к конденсаторам, и схемы резервного питания светодиодов, и обеспечивает функционирование устройства при 100% провалах напряжения питания длительностью более 0.5 сек даже при полной нагрузке устройства, используется схема с дробным резервированием 6/10, что обеспечивает функционирование цепей сигнализации при пропадании напряжения питания длительностью более 1 недели.
Входное напряжение +12В с модуля МБП поступает через модуль МКПП посредством шины питания ШП через разъем X1. Работа конденсаторных блоков C5, C8-C10, C12, C14, C15 и C16 типа ЕНР заключается в накапливании энергии и в момент пропадания питания выдаче ее для питания устройства. Схема контроля напряжения питания осуществляет мониторинг входного напряжения питания «+12В» и в случае пропадания выдает сигнал «Контроль 12В» МЦП. Контроль напряжения питания выполнен на R1, R2 и R4 типоразмера 0805, защитных диодов VD5 и VD6 типа 1N43 и 1,5КЕ, монитора питания D3 типа DS1814C. Индикация вторичного напряжения 12В осуществляется на модуле МКПП, его состояние отображается на светодиоде на передней панели.
Схема «Контроля заряда резервного питания» и схема «Резервное питание светодиодов» предназначены для контроля состояния командных светодиодов на Блоке управления и Блоке релейных модулей. Контроль заряда резервного питания выполнен на преобразователях D1 и D2, LC фильтров L1 и C1, C3, C6, C11, C13, токоограничивающем резисторе R6. Входное напряжение +12В проходит двойное преобразование на элементах D1 типа МС7805 и D2 типа IRU1206, фильтруется LC фильтром. Резервное питание состоит из ионистора C2. Использование ионистора большой емкости позволяет за счет малых токов утечки сохранять долгое время заряд (накопленную энергию) и при меньших габаритах обеспечивать накопление значительно большей энергии. Подключение резервного источника питания светодиодов происходит только при пропадании основного с помощью реле K1, что позволяет поддерживать заряд ионистора C2 на максимальном значении. Выходное напряжение модуля +12В подается на шину питания ШП для других модулей на разъем X1.
На фиг.8 показан модуль выходов сигналов сигнализации (МВС), который предназначен для выдачи команд сигнализаций и аварий. В качестве исполнительных устройств используются 7 бистабильных реле K1-K3, K5-K8 и моностабильное реле K4. Использование бистабильных реле позволяет проводить контроль срабатывания, а моностабильное реле обеспечивает контроль включения устройства. Дискретные сигналы управления каждым выходом поступают через разъем X18 на входной буфер D11 и D12 типа 74АВТ245, обеспечивающие дополнительную развязку от схемы управления. Сигналы с выходов буферов обеспечивают непосредственное управление выходными сигналами сигнализаций и аварий.
Для установки срабатывания соответствующего выхода сигнал поступает на схему установки выхода, которая выполнена на интегральной микросхеме D1, состоящей из элементов ИЛИ-НЕ. С выхода через токоограничивающий резистор R1 сигнал поступает на управляющий транзистор VT1 типа ВС847 и открывает транзистор. Протекающий ток через данный транзистор обеспечивает срабатывание «устанавливающей» обмотки реле K1, т.е. переключает реле в положение «включить команду». При подаче сигнала сброса и отсутствии условия срабатывания данной сигнализации, сигналы сброса поступают на микросхему D2 типа 74НС08 для формирования единого сигнала сброса от всех источников. С выхода D2 сигнал поступает на один из элементов микросхемы D1 и далее через токоограничивающий резистор R43 на транзистор VT2 типа BC847. В коллекторную цепь данного транзистора последовательно подключена «сбрасывающая» обмотка реле K1, обеспечивая переключение реле в исходное состояние (Сброс). Сигналы о замыкании или размыкании с контактов реле поступают на разъем X1. Обработка всех 8-и сигналов идентична вышеописанному.
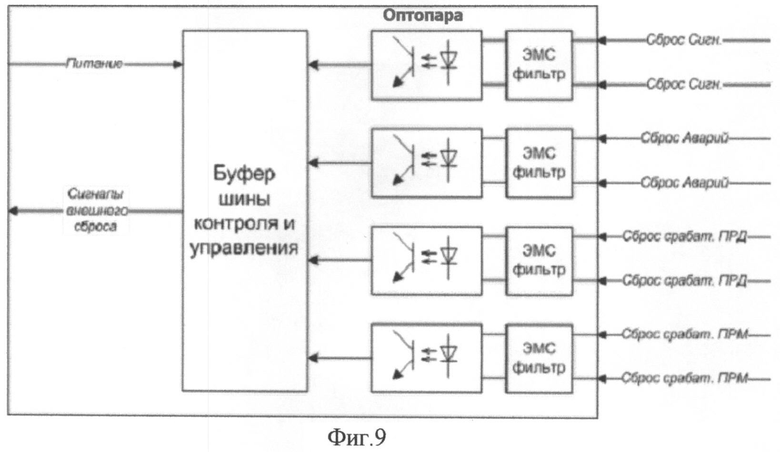
На фиг.9 показан модуль дистанционного сброса (МДС), который предназначен для удаленного сброса сигналов сигнализаций и аварий с помощью подачи опертока на соответствующий вход. Для повышения надежности работы устройства используется входной ЭМС фильтр, позволяющий фильтровать помехи, приходящие от внешних источников. Фильтрация помех происходит на токоограничивающих резисторах R1, R2 типа SQP5, защитных диодах VD5, VD7 типа 1,5KE и варисторе V1 типа CU4032K. Далее сигнал поступает на схему защиты от подачи напряжения обратной полярности, выполненную на диоде VD1. Для защиты гальвано изолированного преобразователя от напряжения обратной полярности служит диод VD6. Сигнал с ЭМС фильтра поступает на схему выбора порога срабатывания, состоящую из трех стабилитронов, перемычек и управляемого генератора тока. С помощью перемычек составляются комбинации из 1-3 стабилитронов, задающих те или иные уровни стабилизации (порогов срабатывания). При превышении входным ПРД сигналом установленного уровня стабилизации, через управляемый генератор тока начинает протекать ток. В качестве стабилитронов могут использоваться стабилитроны VD2, VD3 и VD4 типа 1N53 с напряжениями срабатывания 160, 80 и 36 В. В качестве перемычек X5 - джамперы типа артикула 531230-3. Управляемый генератор тока VT1 может быть типа IXCY10M. Преобразование внешнего сигнала команды в управляющий сигнал происходит на оптогальванической развязке микросхемы D1 типа SFH6156.
Все выходные сигналы каждого канала после оптогальванической развязки поступают на буфер шины контроля и управления D6 типа 74АВТ245. С выхода буфера сигналы поступают на разъем X18 и подаются на модуль МКПП. Входными сигналами для модуля МДС являются только вторичное питание +12В и питание цифровой части +5В, которое поступает на схему с разъема X18.
На фиг.10 показан модуль внешней синхронизации часов (МВСЧ), который предназначен для привязки записей внутренних событий ПКУ к единому станционному времени. ПКУ может работать с внешними синхронизаторами в формате IRIG-B. Часы реального времени (RTC) задают системное время. Возможна синхронизация RTC внешними односекундными импульсами или сигналом IRIG-B от приемника GPS. Этот сигнал подается на МКПП через внутреннюю ШУ блока МКПП.
Разъемы входов синхронизации (NMEA, IRIG-B) для часов реального времени расположены на задней стороне модуля МВСЧ. Оптопарами (оптрон) обеспечивается электрическая изоляция. Входной сигнал международного стандарта IRIG-B поступает из внешнего разъема X4 на схему преобразования, где он нормализуется к стандартному цифровому виду амплитуды +5В. Схема преобразования выполнена на оптогальванической развязке микросхемы D7. Сигнал с выхода D7 поступает на разъем X2 для передачи его на микроконтроллер модуля МКПП для его декодирования.
МВСЧ обеспечивает интерфейс IRIG-B для выдачи сигналов внутренних часов реального времени, к которым привязаны все внутренние события устройства. Сигнал выхода IRIG-B поступает с модуля МКПП с разъема X2 на схему преобразования, выполненную на элементе D8 типа TLP627. Применение D8 позволяет обеспечить гальваническую развязку от других подключаемых устройств. Для обеспечения опертока выходного сигнала IRIG-B в модуле МВСЧ. Предусмотрен DC/DC преобразователь с гальвано развязкой, выполненный на элементе D9. Функционально D9 обеспечивает как выходной оперативный ток для выходной цепи синхронизации, так и гальвано развязку всех внешних подключенных устройств от ПКУ. Выходное напряжение 24В подается на выходной разъем IRIG-B X3. Возможность выдачи сигналов внутреннего времени в стандартном формате IRIG-B является одной из отличительных особенностей данной аппаратуры, т.к. эту функцию выдает только внешний отдельный синхронизатор. В данном случае, не имея внешнего синхронизатора, можно объединить все устройства на объекте в единое время.
Приемопередатчик RS-232 состоит из специализированных преобразователей, обеспечивающих диагностику, помехозащищенность и обмен данными по протоколу NMEA-0183 Версии 2. Интерфейсные сигналы UART (универсального асинхронного приемопередатчика) Rx (прием данных), Tx (передача данных) поступают с разъема X2 на двунаправленный не инвертирующий буфер D4 типа 74АВТ244. Схема преобразователя состоит из гальвано развязывающих оптронов D2, D5 типа SFH6156-3T, гальвано изолированного DC/DC преобразователя D3 типа P6IU-1205E, преобразователя интерфейса UART/RS232 - D6 типа SP232EEN и внешнего разъема X1 типа DRB-9FA. Питание цифровой части осуществляется путем преобразования вторичного питания +12В в гальвано изолированное питание +5В.
На фиг.11 показан модуль приема сигналов сигнализации (МПСС), который предназначен для приема команд сигнализаций от внешних устройств, с помощью подачи опертока на соответствующий вход или замыканием входа. Все входы модуля гальванически изолированы от цифровой схемы.
Входной сигнал поступает на внешний разъем X1 типа MSTB2,5. Для повышения надежности работы устройства используется входной ЭМС фильтр, позволяющий фильтровать помехи, приходящие от внешних источников. Фильтрация помех происходит на токоограничивающих резисторах R1, R3 типа KNP200, защитных диодах VD1, VD2 типа 1,5KE и варисторе VI типа CU4032K. Далее сигнал поступает на схему защиты от подачи напряжения обратной полярности, выполненную на диоде VD5. Для защиты гальвано изолированного преобразователя от напряжения обратной полярности служит диод VD7. Сигнал с ЭМС фильтра поступает на схему выбора порога срабатывания, состоящую из трех стабилитронов, перемычек и управляемого генератора тока. С помощью перемычек составляются комбинации из 3-х стабилитронов, задающих те или иные уровни стабилизации (пороги срабатывания). При превышении входным сигналом установленного уровня стабилизации, через управляемый генератор тока начинает протекать ток. В качестве стабилитронов могут использоваться стабилитроны VD9, VD11 и VD12 типа 1N53 с напряжениями срабатывания 160, 80 и 36 В. В качестве перемычек X4 - джамперы типа артикула 531230-3. Управляемый генератор тока VT1 может быть типа IXCY10M. Преобразование внешнего сигнала команды в управляющий сигнал происходит на оптогальванической развязке микросхемы D1 типа SFH6156. В схеме предусмотрено подключение внутреннего оперативного тока напряжением 24В, получаемого от гальвано изолированного DC/DC преобразователя D11 типа AM2F. Преобразователь D11 получает питание +12В от внутреннего разъема X34. Выходное напряжение D11 +24В подается в разрыв цепи каждого входного канала. Выбор использования внутреннего или внешнего оперативного тока устанавливается джамперами SW1 и SW3 типа артикула 531230-3.
Все входные сигналы каждого канала после оптогальванической развязки поступают на буфер шины контроля и управления D14 типа 74ABT245. С выхода буфера сигналы поступают на разъем X34 и выдаются на модуль МКПП. Входными сигналами для модуля МПСС являются только вторичное питание +12В и питание цифровой части +5В, которое поступает на схему с разъема X34.
На фиг.12 показан модуль кросс-платы релейных модулей (МКПР1 или МКПР2), который предназначен для организации шины обмена данными между МЦП и установленными релейными модулями РМ. Данный модуль представляет собой разветвитель внешней шины управления релейных модулей (ШУРМ). Данный модуль состоит из разъемов X5, X8-X18 типа DIN41612 для подключения релейных модулей. Все эти разъемы соединены одной шиной управления. Для связи с модулем МЦП установлены разъемы X1 и X20 типа FDC26. Сигналы с данных разъемов подключаются к разъемам X5, X8-X18. Для упрощения сборки и подключения опертока Uвн1 и Uвн2 на плате предусмотрен входной разъем для них X2 и X3 для Uвн1 и X6 и X7 для Uвн2. Затем напряжение Uвн1 и Uвн2 с помощью печатных проводников подключается непосредственно к разъемам X5, X8-X18 для ввода его в релейные модули. Диоды VD1 и VD2 служат для защиты от неправильной полярности подключения Uвн1 и Uвн2.
Специалистам в данной области техники очевидно, что предложенное микропроцессорное устройство контроля и управления сигналами релейной защиты и противоаварийной автоматики энергетических сетей может быть реализовано различными программно-аппаратными средствами. Хотя выше были описаны различные варианты осуществления, следует понимать, что они были представлены только для примера, а не для ограничения. Так элементная база: светодиоды, резисторы, диоды и др. не должна быть ограничена вышеуказанными типами и типоразмерами и объем настоящего изобретения не должен ограничиваться вышеописанными вариантами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ СИГНАЛАМИ РЕЛЕЙНОЙ ЗАЩИТЫ И ПРОТИВОАВАРИЙНОЙ АВТОМАТИКИ | 2012 |
|
RU2479903C1 |
| МИКРОПРОЦЕССОРНАЯ ПАНЕЛЬ УПРАВЛЕНИЯ | 2014 |
|
RU2570572C1 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (БАР) | 2010 |
|
RU2457530C1 |
| МНОГОКАНАЛЬНАЯ АППАРАТУРА ПЕРЕДАЧИ ДАННЫХ | 2009 |
|
RU2406121C2 |
| МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ | 2017 |
|
RU2645750C1 |
| МОДУЛЬНОЕ УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ СИГНАЛАМИ РЕЛЕЙНОЙ ЗАЩИТЫ И ПРОТИВОАВАРИЙНОЙ АВТОМАТИКИ | 2015 |
|
RU2609790C1 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАЛОГАБАРИТНЫЙ (БАР-М) | 2012 |
|
RU2487385C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ СВЯЗИ В АБОНЕНТСКОМ ПУНКТЕ БЕСПРОВОДНОЙ СИСТЕМЫ ЭЛЕКТРОСВЯЗИ | 1990 |
|
RU2159007C2 |
| РАЗЪЕМ БОРТОВОЙ | 2001 |
|
RU2216834C2 |






Использование: в области электротехники. Технический результат - повышение надежности, сокращение времени наладки и обслуживания. Устройство содержит микропроцессорный модуль, модуль приема сигналов сигнализаций, модуль выхода сигналов сигнализаций и группу входов и выходов для соединения с ПЭВМ и АСУ ТП, а также модуль внешних фильтров, подключенный через соответствующую кросс-плату релейных модулей, по меньшей мере, к одному релейному модулю, модуль конденсаторных блоков, модуль блока питания, модуль внешней синхронизации часов, которые своими входами-выходами подключены к микропроцессорному модулю, при этом релейные модули снабжены механическими размыкателями с ручным управлением для отключения устройства от входных и выходных цепей. 5 з.п. ф-лы, 12 ил.
1. Устройство контроля и управления сигналами релейной защиты и противоаварийной автоматики энергетических сетей, содержащее микропроцессорный модуль, модуль приема сигналов сигнализаций, модуль выхода сигналов сигнализаций и группу входов и выходов для их соединения с ПЭВМ и АСУ ТП, отличающееся тем, что дополнительно содержит: модуль внешних фильтров, подключенный через соответствующую кросс-плату для релейных модулей, по меньшей мере, к одному релейному модулю, модуль конденсаторных блоков, модуль блока питания, модуль внешней синхронизации часов, которые своими входами-выходами подключены к микропроцессорному модулю, при этом релейные модули снабжены механическими размыкателями с ручным управлением и электронной сигнализацией коммутационного положения размыкателя, которая выведена на лицевую панель устройства и подключена к АСУ ТП для контроля и отключения устройства от входных и выходных цепей.
2. Устройство по п.1, отличающееся тем, что упомянутый модуль внешней синхронизации часов обеспечивает генерацию сигналов точного времени, так что все устройства релейной защиты (РЗ) и противоаварийной автоматики (ПА), подключенные к устройству, независимо от наличия внешнего источника сигналов точного времени, имеют общую временную сетку, что позволяет синхронизировать время наступления событий и прохождения сигналов в управляющих цепях для их регистрации.
3. Устройство по п.1, отличающееся тем, что микропроцессорный модуль в соответствующих входных/выходных цепях модуля приема/выхода сигналов команд использует программные команды функции фиксированного сдвига, функции удержания минимальной длительности, функции удержания минимального периода повторения сигналов, функции выдержки срабатывания, которые не позволяют изменять состояние выходных/входных цепей быстрее заданного времени от их предыдущего изменения состояния.
4. Устройство по п.1, отличающееся тем, что микропроцессорный модуль регистрирует и сохраняет информацию о событиях и прохождении сигналов, сигналов сигнализации положения механического размыкателя, времени приема и передачи сигналов с их отображением, производит программную регулировку выдержек времени на пуск каждого входа/выхода, позволяет проводить в реальном времени дистанционное тестирование конфигурации, самодиагностику устройства и взаимодействовать с АСУ ТП по интерфейсу RS485 или RS232.
5. Устройство по п.4, отличающееся тем, что решение о приеме сигнала принимается только после обработки заданной входной последовательности сигнала.
6. Устройство по п.1, отличающееся тем, что все соединения устройства выполнены печатными проводниками.
| Способ изготовления кос | 1947 |
|
SU87840A1 |
| МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2222083C2 |
| Роликовое устройство для изготовления фасонной проволоки | 1928 |
|
SU10823A1 |
| US 2011058296 A1, 10.03.2001 | |||
| US 7656633 B2, 02.02.2010. | |||

