Область техники
Настоящее изобретение относится к области систем распределения электроэнергии вообще и, в частности, к способам защиты и к защитному оборудованию в таких системах.
Предшествующий уровень техники
Система передачи электроэнергии содержит средства защиты, выполненные с возможностью защиты, контроля и управления работой устройств, являющихся частью системы передачи. Системы защиты детектируют, среди прочего, короткие замыкания, перегрузки по току и напряжению в линиях передачи, трансформаторах и других частях системы передачи электроэнергии.
Защитное оборудование используется во всей системе передачи электроэнергии для обеспечения такой защиты и управления. Защитное оборудование детектирует и изолирует повреждения, например, на линиях передачи и распределения, размыкая автоматические прерыватели и затем восстанавливая протекание электроэнергии после того, как повреждение было устранено. В качестве альтернативы защитное оборудование может быть выполнено с возможностью выбирать альтернативный маршрут для протекания электроэнергии при детектировании повреждения.
Дифференциальная токовая защита представляет собой надежный способ детектирования повреждения и, таким образом, защиты электрической сети. Она основана на идее сравнения токов с обеих сторон защищаемой зоны, например линии передачи, или защищаемого блока, например трансформатора. При нормальных условиях работы сумма всех электрических токов, вводящих и выходящих из защищаемой линии передачи, равна нулю.
Некомпенсированные линии передачи обычно проходят в пределах от нескольких километров до нескольких сотен километров. Чтобы передавать электроэнергию по еще более длинным линиям передачи, например, длиной до тысяч километров, требуется некоторая компенсация для того, чтобы скомпенсировать потери и улучшить передачу электроэнергии. Линии передачи с продольной компенсацией компенсируются посредством конденсаторов, в дальнейшем называемых блоком конденсаторов, расположенных в одном местоположении вдоль линии передачи.
Фиг.1 иллюстрирует систему 1 линии передачи, содержащую линию 3 передач между станцией A и станцией B. Линия 3 передачи имеет продольную компенсацию посредством блока 2 конденсаторов. Каждая сторона линии передачи защищена дифференциальным защитным реле DIFF RELA и DIFF RELB тока соответственно, в дальнейшем называемыми просто дифференциальным реле. Каждая сторона линии 3 передачи обычно также защищается посредством дополнительных устройств защиты, не обсуждаемых здесь.
Повреждение может произойти в любом месте линии передачи между станцией A и станцией B. В частности, для линии передачи с продольной компенсацией повреждение может произойти между станцией A и блоком 2 конденсаторов или между блоком 2 конденсаторов и станцией B. Устройство для определения местоположения повреждений, называемое устройством 6 определения местоположения повреждения (FLA), размещено в дифференциальном реле DIFF RELA для быстрого определения расстояния до повреждения, которое произошло. Имеются разные способы определения расстояния до повреждения, и в публикации международной патентной заявки WO 2007/079990 того же заявителя раскрыт один такой способ для случая некомпенсированных линий передачи.
Однако определение местоположения повреждений на линиях передачи с продольной компенсацией ставит несколько задач. Емкость, добавляемая посредством блока конденсаторов, изменяет появление местоположения повреждения при использовании способов, успешно применяемых к некомпенсированным линиям передачи. Например, если кажущееся полное сопротивление используется в качестве меры расстояния до повреждения, результат вводит в заблуждение вследствие того, что блок конденсаторов вызывает неоднородность в полном сопротивлении линии передачи. В частности, блок конденсаторов создает нелинейную и зависимую от тока схему, появляющуюся между подстанцией и местоположением повреждения.
Понятно, что точное определение местоположения повреждений на линии передачи с продольной компенсаций является очень важным, поскольку такие линии обычно простираются на очень большие расстояния и представляют собой жизненно важные связи между местом производства энергии и центрами потребления. Уже были разработаны различные алгоритмы определения местоположения повреждения для линии с продольной компенсацией, применяющие измерения на одном конце или на двух концах.
Два документа предшествующего уровня техники, касающиеся вопросов определения местоположения повреждений на линиях передачи с продольной компенсацией, включают в себя M. M. Saha, J. Izykowski, E. Rosolowski, B. Kasztenny; "Новый точный алгоритм определения местоположения повреждения для линий с продольной компенсацией" ("A new accurate fault locating algorithm for series compensated lines"), IEEE Transactions on Power Delivery, Vol.14, No.3, July 1999, pp 789-797; и M. M. Saha, J. Izykowski, E. Rosolowski, B. Kasztenny; "Определение местоположения повреждений на линиях передачи электроэнергии с продольной компенсацией" ("Location of fault on series-compensated power transmission lines"), United States Patent, US 6529010, March 4, 2003. Однако способы, описанные в этих документах, основаны на измерениях тока и напряжений на одном конце.
Краткое изложение существа изобретения
Задача изобретения состоит в том, чтобы обеспечить точный алгоритм определения местоположения повреждения для линий с продольной компенсацией. В частности, задача изобретения состоит в том, чтобы обеспечить средство для получения точного местоположения повреждения даже в случаях, когда доступны только неполные измерения на двух концах.
Решение этой задачи, среди прочих, достигается посредством способа, устройства определения местоположения повреждения и компьютерных программ, заявленных в приложенных независимых пунктах формулы изобретения.
В соответствии с изобретением обеспечивается способ определения местоположения повреждения в линии передачи электроэнергии с продольной компенсацией с двумя выводами, содержащей компенсирующий блок для обеспечения продольной компенсации линии передачи. Разные подпрограммы используются для определения местоположения повреждений на сегментах линии от первого вывода до компенсирующего блока и на сегментах линии от второго вывода до компенсирующего блока. Затем делается выбор, чтобы определить правильный результат. Подпрограммы используют синхронизированные измерения трехфазных токов от обоих выводов линии и измерения трехфазного напряжения от одного вывода для детектирования соответствующего удельного расстояния до повреждения. Посредством изобретения точное местоположение повреждения обеспечивается на основе сигналов тока на двух концах и напряжения на одном конце. Использование такого множество входных сигналов устройства определения местоположения повреждения имеет большое практическое значение, поскольку это соответствует использованию измерений токов на двух концах, выполняемых дифференциальными защитными реле тока с дополнительным добавлением локально измеренного трехфазного напряжения. Дополнительно, поскольку способ не зависит от получения измерений напряжения от обоих концов линии передачи, точное местоположение повреждения может быть определено, даже если повреждение вызывает прерывание передачи данных между концами линии передачи.
Изобретение также имеет отношение к системе линии передачи, устройству для защиты от повреждения и компьютерным программам, посредством которых достигаются аналогичные преимущества.
Дополнительные отличительные признаки изобретения и его преимущества станут ясными посредством прочтения последующего описания.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает схему определения местоположения повреждения на линия с продольной компенсацией, связанную с дифференциальными защитными реле тока;
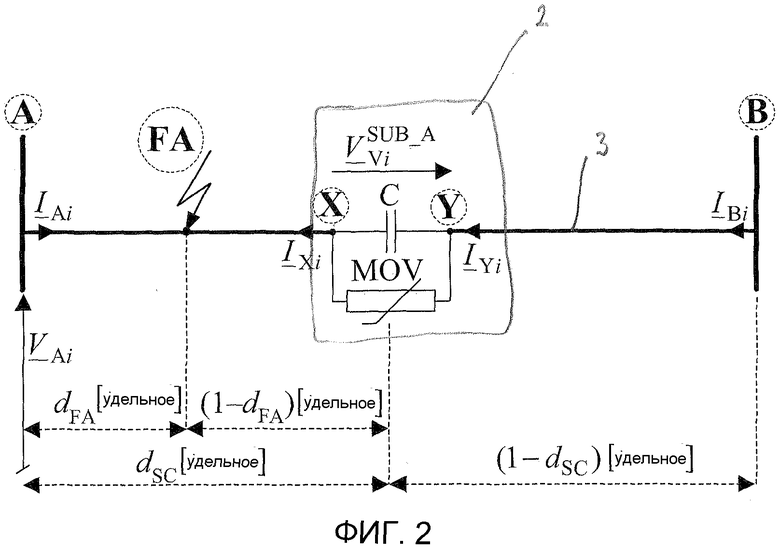
Фиг.2-3 изображают схемы поврежденной линии передачи с продольной компенсацией;
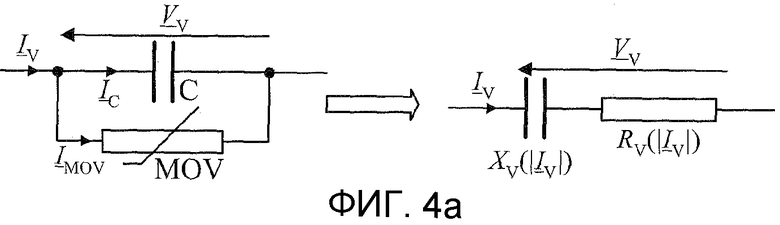
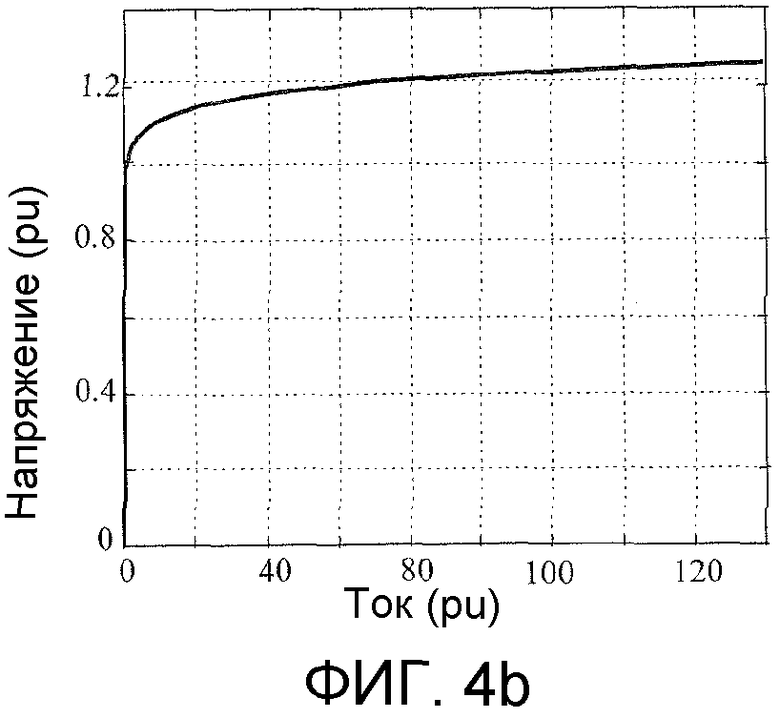
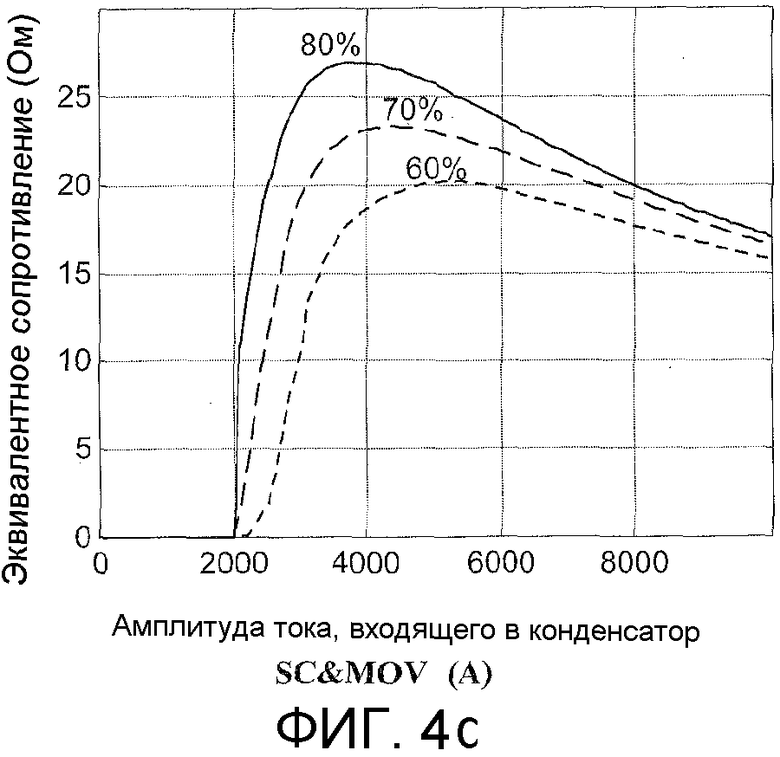
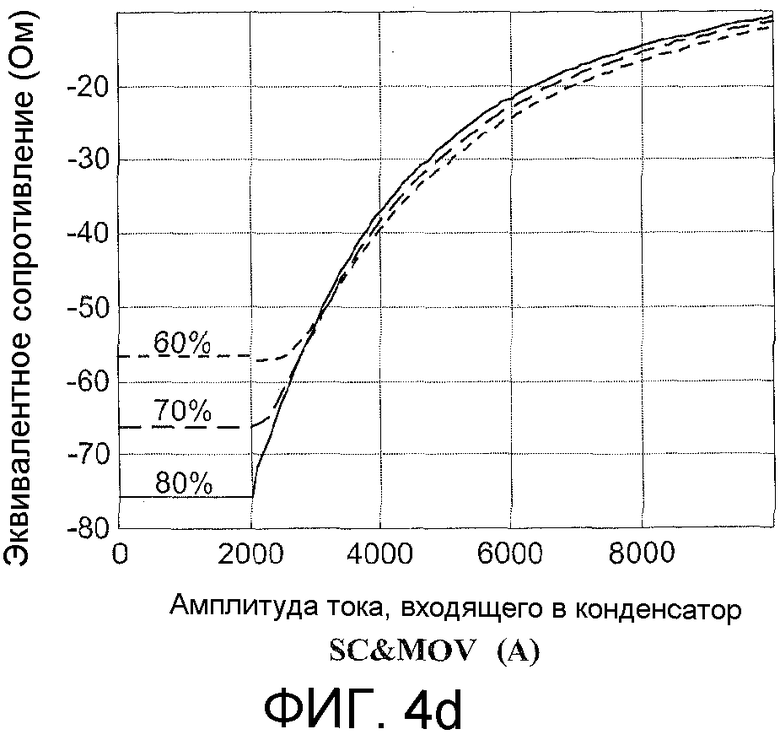
Фиг.4a-4d изображают согласование основной частоты схемы конденсаторов и варисторов SC&MOV: фиг.4a изображает принцип согласования; фиг.4b изображает вольтамперную характеристику варистора MOV; фиг.4c изображает эквивалентное активное сопротивление; фиг.4d изображает эквивалентное реактивное сопротивление;
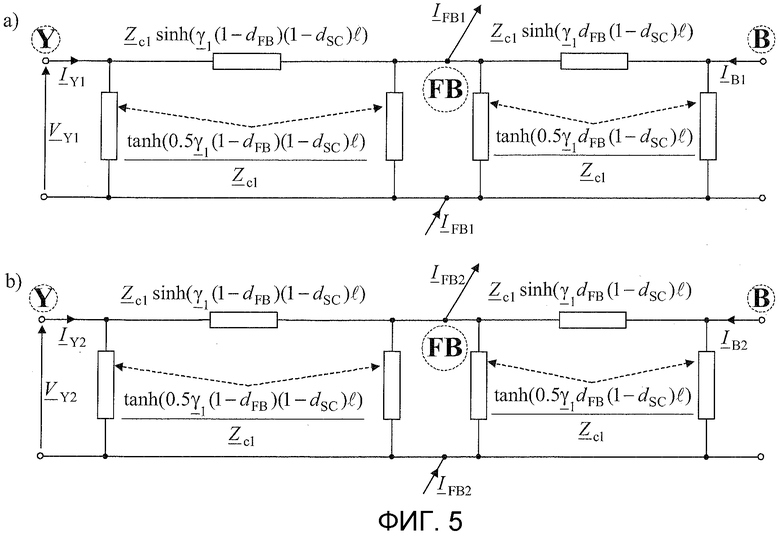
Фиг.5 изображает эквивалентную схему поврежденной секции Y-B линии для: a) прямой последовательности, b) обратной последовательности;
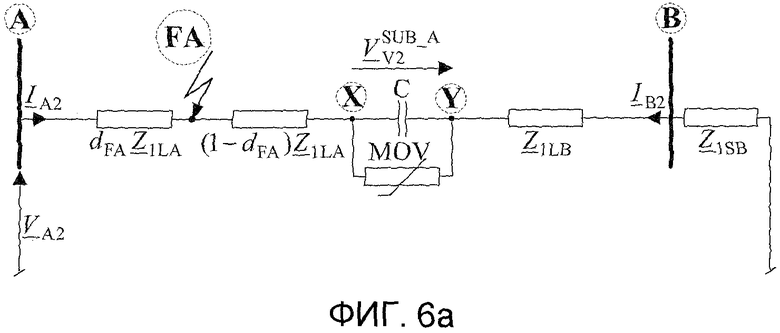
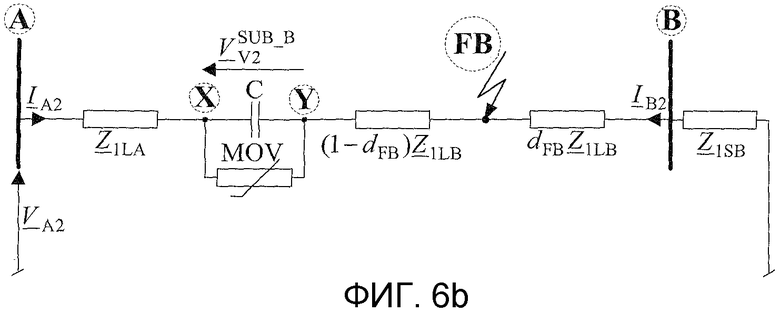
Фиг.6a и 6b изображают схемы сети передачи для обратной последовательности, рассматриваемые на второй стадии процедуры выбора; фиг.6a подпрограмма SUB_A; фиг.6b подпрограмма SUB_B;
Фиг.7 изображает вариант воплощения изобретения, включающий в себя устройства определения местоположения повреждения на двух концах линии передачи.
Описание предпочтительных вариантов воплощения изобретения
Аналогичные номера для ссылок используются на всех чертежах и в описании для обозначения аналогичных или соответствующих частей.
Разработанный алгоритм определения местоположения повреждения в соответствии с настоящим изобретением подходит для применения к линии передачи или распределительной линии, компенсированной посредством блока конденсаторов, например трехфазного блока из постоянных последовательных конденсаторов, снабженных металлооксидными варисторами (MOV), в дальнейшем сокращенно обозначаемых SC&MOV, для защиты от повышения напряжения.
Фиг.1 иллюстрирует систему 1 линии передачи, в которой линия 3 передачи с двумя выводами имеет продольную компенсацию посредством компенсирующего блока, в дальнейшем называемого блоком 2 конденсаторов. Устройство 6 определения местоположения повреждения установлено на конце A (или выводе A) линии передачи. Устройству 6 определения местоположения повреждения предоставляются значения измерений тока и напряжения от линии 3 передачи. Измерения тока предоставляются от обоих концов A, B линии, и измерения напряжения предоставляются с одного конца (локального конца, то есть конца, на котором размещено устройство 6 определения местоположения повреждения). Значения измерений, например, могут предоставляться от трансформаторов 4, 4' тока и трансформатора 5 напряжения, измеряющих трехфазный ток и напряжение на этом конце. Хотя на чертежах показаны эти традиционные средства для получения значений измерений, могут быть использованы другие средства для получения таких значений измерения.
Традиционным образом измерение трехфазного тока с другого конца линии 3 передачи (относительно местоположения устройства 6 определения местоположения повреждения), конца B, передается устройству 6 определения местоположения повреждения через подходящий канал связи. Устройство 6 определения местоположения повреждения в качестве альтернативы может быть установлено на конце B линии, или устройства определения местоположения повреждения могут быть установлены на обоих концах A, B линии 3 передачи.
Поскольку измерения тока на двух концах проводятся от дифференциальных реле тока, эти измерения рассматриваются как имеющие общее начальное время, то есть они синхронизированы, и нет необходимости в их аналитической синхронизации. Однако следует заметить, что если бы понадобилась синхронизация, может быть использован любой известный способ получения синхронизированных измерений тока.
Как упомянуто ранее, повреждение имеет случайную природу и может появиться в любой секции линии 3 передачи, то есть между станцией A и блоком 2 конденсаторов или между блоком 2 конденсаторов и станцией B. Повреждение, происходящее между станцией A и блоком 2 конденсаторов, в настоящей заявке обозначается FA, и повреждение, происходящее между блоком 2 конденсаторов и станцией B, обозначается FB.
В соответствии с изобретением две подпрограммы SUB_A, SUB_B используются для определения местоположения этих гипотетических повреждений FA и FB соответственно. После этого с использованием процедуры выбора будет выбран конечный результат, то есть определено местоположение повреждения.
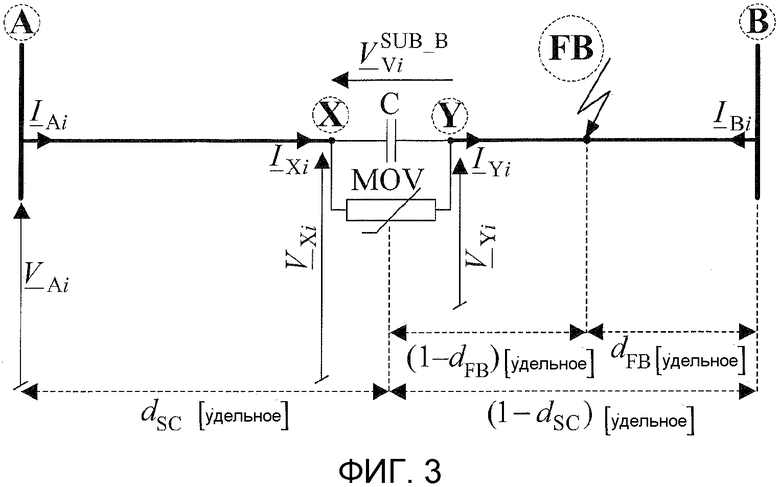
Блок 2 конденсаторов, предпочтительно трехфазный блок конденсаторов и варисторов SC&MOV, делит линию 3 передачи длиной l [км] на два сегмента линии, имеющих длину dSC [удельную] и (1-dSC) [удельную], см. фиг.2. Подпрограммы SUB_A, SUB_B определяют удельное расстояние dFA, dFB до повреждения, каждое из которых имеет отношение к длине конкретного сегмента линии (dSCl) или ((1-dSC)l), где l - длина [км] всей линии 3 передачи. Наконец, эти относительные расстояния dFA, dFB пересчитываются в расстояния dA, dB, выраженные также как удельные, но относительно общей основы, то есть длины l [км] всей линии передачи:
Фиг.2 и фиг.3 представляют схемы поврежденной линии 3 передачи с продольной компенсацией, которые предусматривают использование подпрограмм SUB_A, SUB_B определения местоположения повреждения в соответствии с изобретением.
В последующем описании упоминаются и используются симметричные составляющие, и ради полноты такие составляющие показаны ниже, хотя для дополнительной информации делается ссылка, например, на издание "Симметричные составляющие в применении к электрическим сетям" ("Symmetrical Components, Applied to Electric Power Networks"), G. O. Calabrese, The Roland Press Company, Нью-Йорк, 1959.
Таким образом, величины трех фаз (a, b, c) для симметричных составляющих получаются как:

Дополнительно, также упоминается модель линии с распределенными параметрами и дается ссылка, например, на издание "Гармонические колебания в системах энергоснабжения: основные принципы, анализ и конфигурация фильтров" ("Power Systems Harmonics, Fundamentals, Analysis and Filter Design"), George J. Walkileh, Springer, 2001.
Далее сначала будут отдельно описаны соответствующие подпрограммы, после чего описывается процедура выбора для выбора результатов от подпрограмм SUB_A или SUB_B для определения расстояния до повреждения, затем дается описание конкретного варианта воплощения изобретения, содержащего устройства определения местоположения повреждения на обеих линиях передачи, и, наконец, дается краткое изложение способа изобретения.
1. Подпрограмма SUB_A определения местоположения повреждения
Подпрограмма SUB_A используется для вычисления расстояний до повреждений FA, происходящих между концом A линии передачи и блоком 2 конденсаторов, причем устройство определения местоположения повреждения находится на конце A линии передачи.
Со ссылкой сначала на фиг.2 подпрограмма SUB_A, разработанная для определения местоположения повреждений FA в пределах секции A-X линии, основана на следующей обобщенной модели контура повреждения:
где: dFA - неизвестное расстояние до повреждения [удельное], произошедшего в секции A-X;
R FA - неизвестное сопротивление повреждения;
V Ap, I Ap - напряжение и ток контура повреждения;
I FA - полный ток повреждения (ток пути повреждения);
Z 1LA - полное сопротивление прямой последовательности секции A-X линии (примечание: Z 1LA=dSC Z 1L, где Z 1L - полное сопротивление прямой последовательности всей линии передачи, и dSC - относительное расстояние, обозначенное на фиг.2).
Напряжение и ток контура повреждения составлены в зависимости от типа повреждения как следующие взвешенные суммы соответствующих симметричных составляющих измеренных сигналов:


где: a 1, a 2, a 0 - весовые коэффициенты, зависящие от типа повреждения (см. Таблицу 1 ниже для разных повреждений);
V A1, V A2, V A0 - симметричные составляющие напряжения стороны A;
I A1, I A2, I A0 - симметричные составляющие тока стороны A;
Z 0LA - полное сопротивление нулевой последовательности секции A-X линии передачи.
Сигналы контура повреждения уравнений (4) и (5) выражены в терминах соответствующих симметричных составляющих. Использование такого представления удобно для того, чтобы ввести компенсацию шунтирующей емкости линии. Для определения весовых коэффициентов, а также во всех дополнительных вычислениях симметричных составляющих предполагается естественная последовательность фаз a, b, c (таблица 1).
В соответствии с изобретением полный ток повреждения вычисляется из уравнения (3) предпочтительно с использованием следующей обобщенной модели повреждения:
где: a F1, a F2, a F0 - удельные коэффициенты, которые используются для определения полного тока повреждения (см. таблицу 2 ниже).
Составляющая i-й последовательности полного тока повреждения определяется как сумма составляющих i-й последовательности токов с обоих концов поврежденной секции A-X:
где: I Ai - составляющая i-й последовательности тока, измеренного на станции A;
I Xi - составляющая i-й последовательности тока, протекающего из компенсирующего блока конденсаторов по направлению к повреждению FA;
нижний индекс i обозначает тип составляющей: i=1 - прямая последовательность, i=2 - обратная последовательность, i=0 - нулевая последовательность.
Пренебрегая (в настоящий момент) шунтирующими емкостями линии, получаем:
Из анализа граничных условий повреждений понято, что возможно применить другие, альтернативные, множества коэффициентов, нежели те, которые используются в уравнении (6). Однако чтобы обеспечить высокую точность определения местоположения повреждения, предпочтительно использование конкретного множества из уравнения (6). Предлагается следующий приоритет для использования конкретных составляющих последовательности (соответствующий коэффициент в уравнении (6) не равен нулю) измеренных токов (см. Таблицу 2):
- для замыканий фазы на землю и фазы на фазу: использование составляющих обратной последовательности;
- для замыкания фазы на фазу и на землю: использование составляющих обратной и нулевой последовательности;
- для симметричных замыканий трех фаз: использование наложенных составляющих прямой последовательности.
модели повреждения уравнения (6)
a-b-c-g
Исключение составляющих прямой последовательности ( a F1=0) из полного тока повреждения (6) для всех повреждений, кроме сбалансированных повреждений трех фаз, является характерной особенностью для удельных коэффициентов из таблицы 2. В случае сбалансированных повреждений трех фаз в сигналах содержатся только составляющие прямой последовательности. Прямая последовательность полного тока повреждения может быть вычислена как сумма составляющих прямой последовательности после повреждения на всех выводах линии передачи. Однако в предпочтительном варианте воплощения она вычисляется как следующая сумма наложенных (верхний индекс: superimp.) токов прямой последовательности на концах A, B линии передачи соответственно:
где наложенные токи прямой последовательности в правой стороне уравнения (9) вычисляются посредством вычитания тока прямой последовательности до повреждения (верхний индекс: pre) из тока прямой последовательности повреждения (без верхнего индекса) следующим образом:
Наконец, составляющие обратной, нулевой и наложенной положительной последовательностей измеренных токов используются при вычислении полного тока повреждения (6). Это обеспечивает точное вычисление тока повреждения, протекающего через сопротивление пути повреждения. Дело обстоит так, поскольку исключены составляющие прямой последовательности, для которых эффект шунтирующей емкости является самым явным. Было доказано, что исключение использования токов прямой последовательности ( a F1=0) при вычислении полного тока повреждения является важным подходом, как установлено изобретателем при реализации настоящего изобретения.
После разложения уравнения (3) на действительную и мнимую части и устранения неизвестного сопротивления RFA повреждения искомое расстояние dFA до повреждения определяется как:

После вычисления расстояния до повреждения при помощи уравнения (10) сопротивление RFA повреждения теперь также может быть определено, например, из действительной части уравнения (3) как:
2. Подпрограмма SUB_B определения местоположения повреждения
Подпрограмма SUB_B используется для вычисления расстояний до повреждений FB, происходящих между блоком 2 конденсаторов и концом B линии передачи (на конце B линии не нужно устройство определения местоположения повреждения).
Со ссылкой на фиг.3 передача напряжения от станции A в направлении компенсирующего блока 2 конденсаторов вплоть до точки X дает:



где: Zc1= - волновое полное сопротивление линии для прямой и обратной последовательности;
- волновое полное сопротивление линии для прямой и обратной последовательности;
 - константа распространения линии для прямой и обратной последовательности;
- константа распространения линии для прямой и обратной последовательности;
Zc0= - волновое полное сопротивление для нулевой последовательности;
- волновое полное сопротивление для нулевой последовательности;
 - константа распространения линии для нулевой последовательности;
- константа распространения линии для нулевой последовательности;
 - полное сопротивление линии для прямой и обратной последовательности (Ом/км);
- полное сопротивление линии для прямой и обратной последовательности (Ом/км);
 - полная проводимость линии для прямой и обратной последовательности (См/км);
- полная проводимость линии для прямой и обратной последовательности (См/км);
 - полное сопротивление линии для нулевой последовательности (Ом/км);
- полное сопротивление линии для нулевой последовательности (Ом/км);
 - полная проводимость линии для нулевой последовательности (См/км).
- полная проводимость линии для нулевой последовательности (См/км).
Передача симметричной составляющей тока i-й последовательности от начала секции линии (станции A) до конца неповрежденной секции A-X дает:
Если нет внутреннего повреждения в компенсирующем блоке конденсаторов, то на обеих сторонах блока мы имеем идентичные токи:
Отметим, что в случае напряжения на обеих сторонах компенсирующего блока 2 конденсаторов имеется разное напряжение вследствие присутствия падения напряжения на блоке 2 конденсаторов. Имея симметричные составляющие тока в компенсирующем блоке 2 конденсаторов 2 (в точке X), можно определить фазовые токи в этой точке (в фазах a, b, c):
где: a =exp(j2π/3) - комплексный оператор, смещающий на угол 2π/3.
Фиг.4a представляет схемы согласования конденсатора и варистора SC&MOV по основной частоте. Типичная вольтамперная характеристика варистора MOV показана на фиг 4b. Блок конденсаторов из параллельных ветвей конденсатора SC и его варистора MOV представлен для фазовых векторов основной частоты посредством эквивалентного активного сопротивления RV и реактивного сопротивления XV, соединенных последовательно (фиг.4a). Программы ATP/EMTP (Alternative Transients Program - Electromagnetic Transients Program) подходят для использования в данном случае, программа ATP представляет собой версию для персонального компьютера программы Electromagnetic Transients Program, и программа EMTP представляет собой программу моделирования, обычно используемую в электроэнергетике. Для дополнительных сведений относительно программ ATP-EMTP дается ссылка, например, на издание H. Dommel, "Electro-Magnetic Transients Program", BPA, Portland, Oregon, 1986. Программа, содержащая модули ELECTRICAL NETWORK и MODELS пакета программ ATP-EMTP, может быть применена для определения согласований. Эквивалентные активное и реактивное сопротивления получены как зависящие от амплитуды тока, входящего в первоначальную схему. Это было достигнуто посредством сканирования по широкому диапазону для амплитуды тока повреждения, входящего в конденсатор и варистор SC&MOV. Эквивалентные активное и реактивное сопротивления, определенные для разных отношений компенсации (60, 70, 80%) проанализированной 300-километровой сети передачи с напряжением 400 кВ с одноконтурной линией передачи, представлены на фиг.4c и фиг.4d.
Падения напряжения:
где: I X_a, I X_b, I X_c - фазовые векторы токов, протекающих через блок конденсаторов и варисторов SC&MOV в отдельных фазах (a, b, c), и амплитуда фазового вектора обозначена посредством "||".
Теперь, имея падения напряжений фаз (16a)-(16c), определим составляющие последовательности этого падения напряжения:
Возьмем уравнения (12a)-(12c) и (17a)-(17c) и получим:
В рассматриваемом случае обобщенная модель () описывает контур повреждения относительно точки Y в направлении точки FB повреждения (фиг.3):
где: V FBp - напряжение контура повреждения, составленное в соответствии с типом повреждения, полученное после аналитической передачи из точки Y в точку FB повреждения,
R FB - неизвестное сопротивление пути повреждения,
I FB - полный ток повреждения (ток пути повреждения).
Передача напряжения контура повреждения из точки Y в точку FB повреждения эквивалентна вычитанию падения напряжения на поврежденной секцию линии передачи (часть контура между точкой Y и точкой FB повреждения) из первоначального напряжения контура повреждения в точке Y. Переданное напряжение контура повреждения может быть составлено как следующая взвешенная сумма соответствующих симметричных составляющих:
где: a 1, a 2, a 0 - весовые коэффициенты, зависящие от типа повреждения, как описано в Таблице 1.
С применением модели линии с распределенными параметрами симметричные составляющие напряжений из уравнения (20) определяются следующим образом:
где: V Y1, V Y2, V Y0 - симметричные составляющие напряжения в точке Y, определенные в уравнениях (18a)-(18c);
I Y1, I Y2, I Y0 - симметричные составляющие тока в точке Y, определенные в уравнениях (14a)-(14c);
dFB - неизвестное расстояние от станции B до повреждения FB (удельное);
l - длина линии передачи (км),
dSC - относительное расстояние, изображенное на фиг.2
γ 1, γ 2, Z c1, Z c0 - как в уравнениях (12a)-(12c);
Подпрограмма SUB_B - полный ток I FB повреждения
Снова полный ток I FB повреждения выражается как следующая комбинация его симметричных составляющих:
где: a F1, a F2, a F0 - удельные коэффициенты, зависящие от типа повреждения и предполагаемого предпочтения относительно использования конкретных последовательностей. Предпочтительное множество представлено в таблице 3 и отличается от множества, представленного в таблице 2 (для подпрограммы SUB_A).
a-b-c-g
Возможно применить другие, альтернативные, множества удельных коэффициентов, однако коэффициенты, для которых устранена нулевая последовательность (a F0=0) - как в Таблице 3 - являются предпочтительным выбором для рассматриваемого алгоритма определения местоположения повреждения. Таким образом, при определении полного тока повреждения избегается использование параметров линии для нулевой последовательности, которые рассматриваются как ненадежные данные. Это имеет преимущества для обеспечения максимально возможной точности определения местоположения повреждения. Можно также заметить, что при использовании удельных коэффициентов, предложенных в таблице 3, установлено предпочтение использования обратной последовательности по сравнению с прямой последовательностью для повреждения одной фазы и повреждения типа замыкания фазы с фазой.
Точное определение симметричных составляющих полного тока повреждения может быть выполнено со строгим учетом модели с распределенными параметрами поврежденной линии передачи. Такие модели для прямой последовательности и обратной последовательности представлены на фиг.5. С учетом этих моделей можно вывести следующую формулу для i-й симметричной составляющей полного тока повреждения:
где:

где: i=1 для прямой последовательности или i=2 для обратной последовательности.
Полученная формула (23) для i-й симметричной составляющей полного тока повреждения является компактной и неизвестное расстояние dFB до повреждения содержится только в знаменателе формулы (23), то есть dFB не содержится в числителе M i.
Подставляя составляющие прямой и обратной последовательностей полного тока повреждения в уравнение (22), а также принимая во внимание, что нулевая последовательность устранена (таблица 3), получаем полный ток повреждения в виде:
где: M 1, M 2 - величины, определенные в уравнении (23a),
a F1, a F2 - удельные коэффициенты, собранные в Таблице 3.
Подпрограмма SUB_B: формула определения местоположения повреждения
Подстановка полного тока повреждения уравнения (24) в обобщенную модель контура повреждения уравнения (19) дает:
и, наконец:

где: V FBp определено в уравнениях (20) и (21a)-(21c) с использованием весовых коэффициентов, определенных для разных типов повреждений в таблице 1,
M 1, M 2 - величины, определенные в уравнении (23a),
a F1, a F2 - удельные коэффициенты, зависящие от типа повреждения, собранные в Таблице 3.
Выведенная формула (26) определения местоположения повреждения является компактной и охватывает разные типы повреждения, которые требуют подстановки соответствующих коэффициентов типа повреждения, представленных в таблице 1 и в таблице 3.
В формуле (26) определения местоположения повреждения имеется два неизвестных: расстояние dFB до повреждения и сопротивление RFB повреждения. После разложения уравнения (26) на действительную и мнимую части может быть применен один из многих известных численных методов для решения нелинейных уравнений. Автор изобретения настоящей заявки обнаружил, что итерационный метод Ньютона-Рафсона является хорошим выбором для этого.
При применении метода Ньютона-Рафсона начало итерационных вычислений может быть выполнено с начальными значениями для неизвестных  , обозначенных верхним индексом 0 (количество итераций: 0 как отправная точка для первой итерации вычислений). Эти значения могут быть вычислены из формулы (26) определения местоположения повреждения, адаптированной к сосредоточенной модели линии (??) с пренебрежением шунтирующими емкостями. Это может быть достигнуто посредством внесения в уравнение (26) замены: cosh(x)→1, sinh(x)→x, где x - параметр рассматриваемой гиперболической тригонометрической функции. В результате получаем следующую упрощенную формулу определения местоположения повреждения:
, обозначенных верхним индексом 0 (количество итераций: 0 как отправная точка для первой итерации вычислений). Эти значения могут быть вычислены из формулы (26) определения местоположения повреждения, адаптированной к сосредоточенной модели линии (??) с пренебрежением шунтирующими емкостями. Это может быть достигнуто посредством внесения в уравнение (26) замены: cosh(x)→1, sinh(x)→x, где x - параметр рассматриваемой гиперболической тригонометрической функции. В результате получаем следующую упрощенную формулу определения местоположения повреждения:

с напряжением и током контура повреждения из точки Y, определенными для сосредоточенной модели линии с пренебрежением шунтирующими емкостями:

и

При разложении уравнения (27) на действительную и мнимую части получается следующая компактная формула для расстояния до повреждения после устранения неизвестного сопротивления повреждения:

Вычислив расстояние до повреждения из уравнения (31), можно вычислить другое неизвестное, то есть сопротивление повреждения. Например, из действительной части уравнения (27) получаем:

На практике для длин секций линии передачи до 150 км могут быть использованы простые формулы (31)-(32). Однако чтобы обеспечить высокую точность определения местоположения повреждения на более длинных линиях, должно быть применено решение Ньютона-Рафсона для уравнения (26), разложенного ранее на действительную и мнимую части. Результаты, полученные из уравнений (31)-(32), используются для инициализации этих итерационных вычислений.
3. Процедура выбора
Примененные подпрограммы SUB_A, SUB_B дают результаты для 1) расстояния до повреждения и 2) сопротивления повреждения (dFA, RFA) и (dFB, RFB) соответственно. Фактическому повреждению соответствуют результаты только одной подпрограммы, поэтому результаты подпрограмм анализируются, чтобы определить, какие результаты следует использовать для определения местоположения повреждения. Подпрограмма, соответствующая фактическому повреждению, обозначается как правильная подпрограмма.
Сначала отклоняется подпрограмма, дающая в результате расстояние до повреждения, находящееся вне диапазона секции линии передачи, и/или сопротивление повреждения с отрицательным значением. В подавляющем большинстве случаев повреждения это позволяет выбрать правильную подпрограмму.
В случае если выбор на основе расстояния до повреждения и сопротивления повреждения оказывается недостаточным, следует продолжить дальнейший выбор. С этой целью должны быть рассмотрены схемы сети передачи для обратной последовательности, актуальные для обеих подпрограмм (фиг.6a для SUB_A и фиг.6b для SUB_B).
Схемы на фиг.6a и 6b предназначены для обратной последовательности и, таким образом, удовлетворяют разным повреждениям за исключением сбалансированных повреждений трех фаз. В случае сбалансированных повреждений трех фаз нет составляющих обратной последовательности, и для таких повреждений нужно рассматривать наложенные составляющие прямой последовательности. В обоих случаях:
a) составляющие обратной последовательности: для разных повреждений, кроме сбалансированных повреждений трех фаз;
b) наложенные составляющие прямой последовательности: для сбалансированных повреждений трех фаз полные сопротивления сети передачи идентичны и обозначены на фиг.6a и 6b с использованием нижнего индекса 1.
3.1 Подпрограмма SUB_A:
Относительно фиг.6a можно вывести напряжение обратной последовательности в точке FA повреждения, наблюдаемой с обеих сторон линии передачи (верхний индекс A и B соответственно), как:
где: 
 - обратная последовательность падения напряжения на конденсаторе и варисторе SC&MOV, определенная на основе фазовых векторов этих падений напряжения в отдельных фазах a, b, c:
- обратная последовательность падения напряжения на конденсаторе и варисторе SC&MOV, определенная на основе фазовых векторов этих падений напряжения в отдельных фазах a, b, c:  .
.
Сравнивая уравнения (33) и (34), получаем полное сопротивление источника:

3.2 Подпрограмма SUB_B:
Относительно фиг.6b можно вывести напряжение обратной последовательности в точке FB повреждения, наблюдаемой с обеих сторон линии передачи (верхний индекс A и B соответственно), как:

где:  - обратная последовательность падения напряжения на конденсаторе и варисторе SC&MOV, определенная на основе фазовых векторов этих падений напряжения в отдельных фазах a, b, c:
- обратная последовательность падения напряжения на конденсаторе и варисторе SC&MOV, определенная на основе фазовых векторов этих падений напряжения в отдельных фазах a, b, c:  .
.

Сравнивая уравнения (36) и (37), получаем:

3.3 Выбор правильной подпрограммы
Подпрограмма SUB_A выбирается в качестве правильной подпрограммы, если определенное полное сопротивление источника:
 (35) имеет характер R-X и близко к фактическому полному сопротивлению источника
Z
1SB.
(35) имеет характер R-X и близко к фактическому полному сопротивлению источника
Z
1SB.
Подпрограмма SUB_B выбирается в качестве правильной подпрограммы, если определенное полное сопротивление источника:
 (38) имеет характер R-X и близко к фактическому полному сопротивлению источника
Z
1SB.
(38) имеет характер R-X и близко к фактическому полному сопротивлению источника
Z
1SB.
4. Включение устройств определения местоположения повреждения в дифференциальное реле тока на обоих концах линии
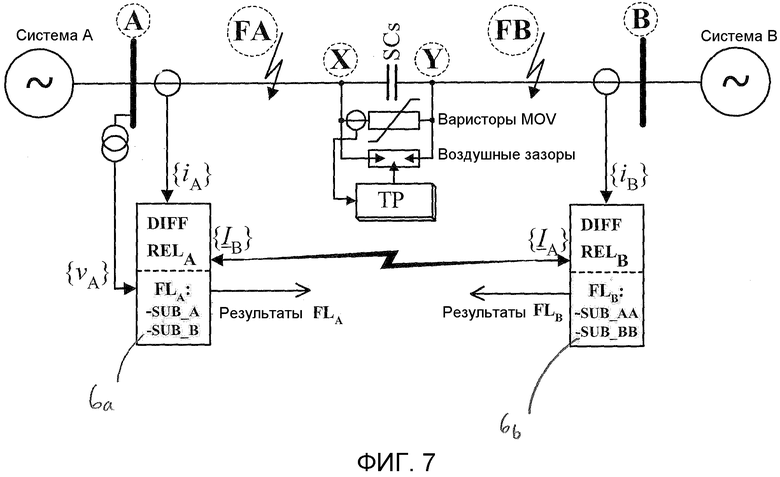
В начале этой заявки на патент предполагалось, что устройство определения местоположения повреждения включено в дифференциальное защитное реле тока с одной стороны линии (например, на станции A, как показано на фиг.1). Однако также возможно включить устройства определения местоположения повреждения в защитные реле на обоих концах линии передачи, как показано на фиг.7.
В случае использования устройств 6a, 6b определения местоположения повреждения (см. фиг.7) на обоих концах линии передачи следующие подпрограммы включены в следующие устройства определения местоположения повреждения с соответствующей характеристикой подпрограммы относительно использования или предотвращения использования представления конденсаторов и варисторов SC&MOV для вычисления расстояния до повреждения:
- определение местоположения повреждений FA на секции A-X линии:
• подпрограмма SUB_A устройства 6a определения местоположения повреждения (представление конденсаторов и варисторов SC&MOV не используется)
• подпрограмма SUB_AA устройства 6b определения местоположения повреждения (представление конденсаторов и варисторов SC&MOV используется)
- определение местоположения повреждений FB на секции B-Y линии:
• подпрограмма SUB_B устройства 6a определения местоположения повреждения (представление конденсаторов и варисторов SC&MOV используется)
• подпрограмма SUB_BB устройства 6b определения местоположения повреждения (представление конденсаторов и варисторов SC&MOV не используется).
Можно получить результаты определения местоположения повреждения от устройств определения местоположения повреждения на обоих концах линии передачи, и посредством изучения их можно идентифицировать, в какой секции (секции A-X вблизи от станции A или секция B-Y вблизи от станции B) имеется повреждение. Идентифицировав поврежденную секцию (A-X или B-Y) линии передачи, можно получить результаты определения местоположения повреждения от устройства определения местоположения повреждения, для которого поврежденная секция линии передачи находится ближе. А именно, если идентифицировано повреждение в секции A-X, то берется результат определения местоположения от подпрограммы SUB_A устройства 6a определения местоположения повреждения (представление конденсаторов и варисторов SC&MOV не используется). В ином случае, если повреждение идентифицировано на секции B-Y, то берется результат определения местоположения повреждения от подпрограммы SUB_B устройства 6b определения местоположения повреждения (представление конденсаторов и варисторов SC&MOV не используется). Таким образом, представление конденсаторов и варисторов SC&MOV (на основе согласования основной частоты) не будет влиять на результаты определения местоположения повреждения, исходящие от правильной подпрограммы, то есть соответствующей фактическому повреждению.
5. Краткое изложение представленного алгоритма и заключение
Рассмотрено использование сигналов тока на двух концах и напряжения на одном конце в качестве входных сигналов для определения местоположения повреждения на линии с продольной компенсацией. Такое множество входных сигналов устройства определения местоположения повреждения имеет практическое значение, поскольку это соответствует использованию измерений токов на двух концах, выполняемых дифференциальными защитными реле тока с дополнительным добавлением локально (то есть на шине, где функция определения местоположения повреждения включена в реле) измеренного трехфазного напряжения. Таким образом, определение местоположения повреждения с использованием двух концов может быть выполнено с использованием канала связи дифференциальных защитных реле тока. Такие измерения с двух концов рассматриваются как синхронизированные, что имеет место для дифференциальных реле тока.
Представленный алгоритм определения местоположения повреждения составлен из двух подпрограмм SUB_A, SUB_B определения местоположения и процедуры выбора, которая применяется для выбора правильной подпрограммы, то есть подпрограммы, соответствующей фактическому повреждению. Обе подпрограммы сформулированы для естественных контуров повреждения, составленных в соответствии с типом повреждения.
Подпрограмма SUB_A, которая предназначена для определения местоположения повреждений в секции линии, смежной со станцией A, где установлено устройство определения местоположения повреждения, сформулирована с использованием обобщенной модели контура повреждения. Была получена единая формула первого порядка для расстояния до повреждения и сопротивления повреждения, в которой комплексные коэффициенты зависят от типа повреждения. Для формулировки подпрограммы использовалась сосредоточенная модель линии без учета шунтирующих емкостей.
Однако дополнительное улучшение точности определения местоположения повреждения может быть достигнуто посредством рассмотрения модели линии с распределенными параметрами аналогично типичным устройствам определения местоположения повреждения на одном конце для традиционных некомпенсированных линий.
Выведение оставшейся подпрограммы (SUB_B) начинается с аналитической передачи сигналов напряжения и тока от станции А (где установлено устройство определения местоположения повреждения) по направлению к компенсирующему блоку конденсаторов. Трехфазные сигналы разделяются на отдельные составляющие последовательности, и передача выполняется для этих величин с применением модели линии с распределенными параметрами. На следующем шаге выполняется передача падения напряжения на компенсирующем блоке посредством вычитания падения напряжения на компенсирующем блоке конденсаторов SCs&MOV с использованием согласования основной частоты. После выполнения двух упомянутых выше этапов получаются сигналы тока на двух концах и напряжения на одном конце в качестве входных сигналов подпрограммы SUB_B, предназначенной для определения местоположения повреждений в удаленной секции линии, то есть в секции линии за компенсирующим блоком конденсаторов, если смотреть от точки установки устройства определения местоположения повреждения (станции A).
Была разработана эффективная процедура для выбора правильной подпрограммы. Это требуется, поскольку с фактическим повреждением совместимы результаты только одной подпрограммы. Сначала отклоняется подпрограмма, дающая в результате расстояние до повреждения вне диапазона секции и/или сопротивление повреждения с отрицательным значением. В подавляющем большинстве случаев повреждений это позволяет выбрать правильную подпрограмму. Дополнительный выбор должен быть выполнен только в редких случаях, для которых выбор на основе расстояния до повреждения и сопротивления повреждения оказывается недостаточным. С этой целью были рассмотрены схемы сети передачи для обратной последовательности (в случае сбалансированных повреждений трех фаз для наложенной прямой последовательности), актуальные для обеих подпрограмм.
Оценивается полное сопротивление Z 1SB удаленного источника, и если это оцененное полное сопротивление для отдельной подпрограммы имеет характер R-X и близко к фактическому полному сопротивлению источника, то эта подпрограмма выбирается в качестве правильной подпрограммы.
Предполагалось, что функция устройства определения местоположения повреждения включена в дифференциальное защитное реле тока на одном конце линии (например, на конце A). Однако также возможно включить устройства определения местоположения повреждения в защитные реле на обеих сторонах линии. Тогда можно получить результаты определения местоположения повреждения на обоих концах и посредством их сравнения идентифицировать, в какой секции (вблизи от станции A или вблизи от станции B) имеется повреждение. Идентифицировав поврежденную секцию линии передачи, можно получить результат определения местоположения от устройства определения местоположения повреждения, для которого поврежденная секция линии передачи находится ближе. Таким образом, представление конденсаторов SCs&MOV (на основе согласования основной частоты) не будет влиять на результаты определения местоположения повреждения, исходящие от правильной подпрограммы.
Представленный способ определения местоположения повреждения на линии с продольной компенсацией, связанной к дифференциальным реле тока, был проверен и оценен с использованием данных повреждения, полученных из моделирования с помощью программ ATP-EMTP различных повреждений на линии передачи. Это показало верность представленного способа и улучшенную точность определения местоположения повреждения по сравнению с подходом с использованием одного конца, описанного в ссылках, упомянутых в разделе описания уровня техники настоящей заявки.
Данный способ определения местонахождения повреждений на линиях передачи может быть включен в качестве добавочной функциональной возможности дифференциального реле тока. Дифференциальные реле тока используют фазовые токи, измеренные синхронно на обоих концах линии в целях защиты. Тем самым, могут быть получены сигналы, необходимые для способа. Способ обеспечивает точное определение расстояния до повреждения, на которое, тем самым, можно быстро отреагировать. Устройство определения местоположения повреждения, содержащее программное обеспечение или компьютерные программы для выполнения способа, может быть включено в такое дифференциальное реле тока или другое устройство защиты от повреждений. В частности, такие компьютерные программы основаны на описанном выше способе и, таким образом, на описанных выше уравнениях. Тем самым, изобретение также обеспечивает устройство, например дифференциальное реле тока, для определения местоположения повреждения в линии передачи электроэнергии с продольной компенсацией с двумя выводами, причем устройство содержит блок обработки, выполненный с возможностью выполнять способ.
Заявленная группа изобретений относится к системам электроэнергетики и предназначена для определения местоположения повреждения в линии электропередач с продольной компенсацией. Способ определения местоположения повреждения в линии передачи предполагает определение удельного расстояния до повреждения, произошедшего на сегменте линии между выводом А и компенсирующим блоком, определение удельного расстояния до повреждения, произошедшего на сегменте линии между выводом В и компенсирующим блоком, определение местоположения повреждения посредством выбора результата, являющегося правильным. При этом при определении расстояния до места повреждения используются синхронизированные измерения трехфазных токов от выводов А и В, а также измерения трехфазного напряжения, полученные от вывода А. При вычислении местоположения повреждения осуществляется передача сигналов напряжения и тока от вывода А к компенсирующему блоку, вычисление падения напряжения на компенсирующем блоке с использованием согласования на основной частоте. Система определения местоположения повреждения содержит линию передачи электроэнергии с продольной компенсацией с двумя выводами (А, В), компенсирующий блок, блок обработки, дифференциальное реле тока для защиты линии, а также устройства определения местоположения повреждения, размещенные на выводах А и В. Техническим результатом заявленной группы изобретений является обеспечение более точного определения места повреждения линий с продольной компенсацией. 4 н. и 15 з.п. ф-лы, 11 ил.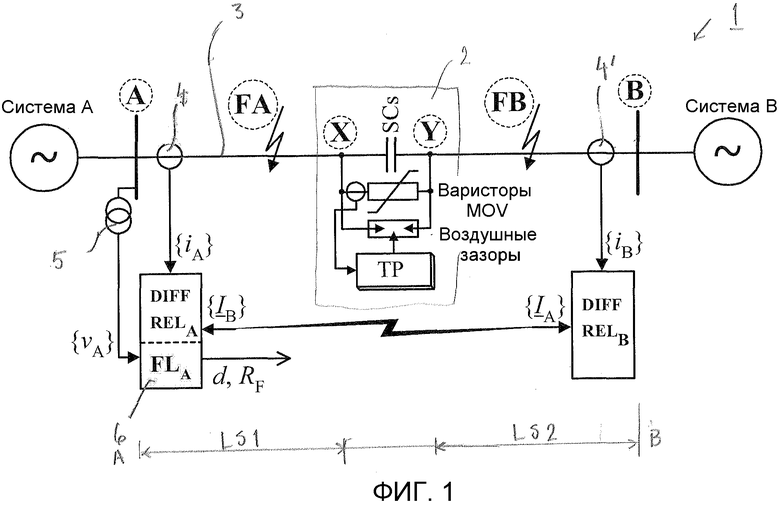
1. Способ определения местоположения повреждения в линии (3) передачи электроэнергии с продольной компенсацией с двумя выводами, имеющей длину l и содержащей первый вывод A и второй вывод В и дополнительно содержащей компенсирующий блок (2) для обеспечения продольной компенсации линии (3) передачи, причем компенсирующий блок (2) расположен на расстоянии dSC от вывода А и на расстоянии l-dSC от вывода В, отличающийся тем, что содержит этапы, на которых:
определяют посредством первой подпрограммы (SUB_A) удельное расстояние dFA до повреждения (FA), произошедшего на сегменте (LS1) линии передачи между выводом А и компенсирующим блоком (2), причем сегмент (LS1) линии имеет длину dSC, a dFA связано с dSCl и дополнительно связывает расстояние dFA с длиной l линии передачи соотношением:

определяют посредством второй подпрограммы (SUB_B) удельное расстояние dFB до повреждения (FB), произошедшего на сегменте (LS2) линии передачи между выводом В и компенсирующим блоком (2), причем сегмент (LS2) линии имеет длину l-dSC, а расстояние dFB связано с ((1-dSC)l) и дополнительно связывает расстояние dFB с длиной l линии передачи соотношением:

определяют местоположение повреждения посредством выбора среди результата dFA, полученного от первой подпрограммы (SUB_A), и результата dFB, полученного от второй подпрограммы (SUB_B), результата, считающегося правильным, и
при этом первая и вторая подпрограммы (SUB_A, SUB_B) используют синхронизированные измерения трехфазных токов от обоих выводов (A, В) и измерения трехфазного напряжения от одного вывода (A) для определения соответствующего удельного расстояния dFA, dFB до повреждения (FA, FB), причем
вторая подпрограмма (SUB_B) выполняет этапы, на которых:
аналитически передают сигналы напряжения и сигналы тока от конца А линии по направлению к компенсирующему блоку (2),
передают падения напряжения на компенсирующем блоке (2) посредством вычитания падения напряжения на компенсирующем блоке (2) с использованием согласования основной частоты,
посредством чего упомянутые выше этапы обеспечивают сигналы тока на двух концах и сигналы напряжения на одном конце в качестве входных сигналов в подпрограмму (SUB_B).
2. Способ по п.1, в котором первая подпрограмма (SUB_A) основана на обобщенной модели контура повреждения:

где  - напряжение и ток контура повреждения соответственно;
- напряжение и ток контура повреждения соответственно;
 - полный ток повреждения;
- полный ток повреждения;
 - полное сопротивление прямой последовательности секции A-Х линии,
- полное сопротивление прямой последовательности секции A-Х линии,
где Х является точкой соединения с компенсирующим блоком (2) сегмента (LS1) линии передачи.
3. Способ по п.1 или 2, в котором первая подпрограмма (SUB_A), выполняет этапы, на которых:
определяют симметричные составляющие тока и напряжения 
 соответствующие синхронизированным измерениям трехфазного тока и измерениям трехфазного напряжения,
соответствующие синхронизированным измерениям трехфазного тока и измерениям трехфазного напряжения,
определяют напряжение  контура повреждения относительно вывода A на основании соответствующих симметричных составляющих напряжения
контура повреждения относительно вывода A на основании соответствующих симметричных составляющих напряжения  и на основании типа повреждения,
и на основании типа повреждения,
определяют ток  контура повреждения относительно вывода A на основании соответствующих симметричных составляющих тока
контура повреждения относительно вывода A на основании соответствующих симметричных составляющих тока  и на основании типа повреждения,
и на основании типа повреждения,
определяют полный электрический ток повреждения  посредством использования обобщенной модели повреждения:
посредством использования обобщенной модели повреждения:

где  - коэффициенты, связанные с типом повреждения, и
- коэффициенты, связанные с типом повреждения, и  определяется как сумма составляющих тока i-й последовательности с обоих концов (А, X) сегмента (LS1) линии,
определяется как сумма составляющих тока i-й последовательности с обоих концов (А, X) сегмента (LS1) линии,
пренебрегая шунтирующими емкостями линии передачи, тем самым получают уравнение:

определяют расстояния dFA на основании напряжения контура повреждения, тока  контура повреждения и полного тока повреждения
контура повреждения и полного тока повреждения  и
и
причем расстояние dFA определяют посредством решения уравнения:

4. Способ по любому из пп.1 или 2, в котором первая подпрограмма (SUB_A) дополнительно выполняет этап, на котором определяют сопротивление (RFA) повреждения, произошедшего на сегменте (LS1) линии передачи между концом А линии и компенсирующим блоком (2), причем вторая подпрограмма (SUB_B) дополнительно выполняет этап, на котором определяют сопротивление (RFB) повреждения, произошедшего на сегменте (LS2) линии передачи между концом В линии и компенсирующим блоком (2), и причем этап определения местоположения повреждения содержит этап, на котором выбирают результаты, считающиеся правильным, посредством дополнительного использования сопротивлений (RFA, RFB) повреждения.
5. Способ по п.4, в котором этап определения местоположения повреждения посредством выбора содержит этап, на котором выбирают среди расстояний до повреждения и сопротивлений повреждения (dFA, RFA; dFB, RFB) посредством отклонения расстояний до повреждения, выходящих за пределы диапазона секции, и/или отклонения сопротивлений повреждения, имеющих отрицательные значения.
6. Способ по п.5, в котором этап определения местоположения повреждения посредством выбора содержит этап, на котором анализируют схемы сети передачи, содержащей линию (3) передачи электроэнергии с продольной компенсацией с двумя выводами для обратной последовательности.
7. Способ по любому из пп.5 или 6, в котором первая подпрограмма (SUB_A) выполняет дополнительный этап, на котором:
определяют сопротивление (RFA) повреждения посредством решения уравнения:

8. Способ по п.1, в котором тип повреждения содержит один тип из множества, состоящего из: замыкания фазы на землю, замыкания фазы на фазу, замыкания фазы на фазу и на землю, симметричных замыканий трех фаз.
9. Способ по п.1, в котором этап передачи сигналов напряжения от конца А линии по направлению к компенсирующему блоку (2) обеспечивает:
где  - волновое полное сопротивление линии (3) передачи для прямой и обратной последовательности;
- волновое полное сопротивление линии (3) передачи для прямой и обратной последовательности;
 - константа распространения линии (3) передачи для прямой и обратной последовательности;
- константа распространения линии (3) передачи для прямой и обратной последовательности;
 - волновое полное сопротивление линии (3) передачи для нулевой последовательности;
- волновое полное сопротивление линии (3) передачи для нулевой последовательности;
 - константа распространения линии (3) передачи для нулевой последовательности;
- константа распространения линии (3) передачи для нулевой последовательности;
 - полное сопротивление линии (3) передачи для прямой и обратной последовательности (Ом/км);
- полное сопротивление линии (3) передачи для прямой и обратной последовательности (Ом/км);
 - полная проводимость линии (3) передачи для прямой и обратной последовательности (См/км);
- полная проводимость линии (3) передачи для прямой и обратной последовательности (См/км);
 - полное сопротивление линии (3) передачи для нулевой последовательности (Ом/км);
- полное сопротивление линии (3) передачи для нулевой последовательности (Ом/км);
 - полная проводимость линии (3) передачи для нулевой последовательности (См/км), и
- полная проводимость линии (3) передачи для нулевой последовательности (См/км), и
передают симметричную составляющую тока i-й последовательности от конца А линии по направлению к компенсирующему блоку (2):
предполагают отсутствие внутренних повреждений в компенсирующем блоке (2), посредством чего получают идентичные электрические токи:

определяют фазовые токи фаз а, b, с в точке X, являющейся точкой соединения сегмента (LS1) линии с компенсирующим блоком (2), как:
где а=ехр(j2π/3) - комплексный оператор, смещающий на угол 2π/3.
10. Способ по п.9, в котором этап передачи падений напряжения на компенсирующем блоке (2) содержит этапы, на которых:
согласуют компенсирующий блок (2) по основной частоте и вычисляют падения напряжения посредством уравнений:
где  - фазовые векторы токов, протекающих через компенсирующий блок (2),
- фазовые векторы токов, протекающих через компенсирующий блок (2),
определяют составляющие последовательности упомянутых выше падений напряжения:
используют уравнения (12а-12с) и (17а-17с) для получения уравнений:
используют согласование компенсирующего блока (2), задавая обобщенную модель контура повреждения:

где  - напряжение контура повреждения, основанное на типе повреждения, полученное посредством вычитания падения напряжения на втором сегменте (LS2) линии от точки Y соединения, соединяющей второй сегмент (LS2) линии с компенсирующим блоком (2), до точки (FB) повреждения второго сегмента (LS2) линии,
- напряжение контура повреждения, основанное на типе повреждения, полученное посредством вычитания падения напряжения на втором сегменте (LS2) линии от точки Y соединения, соединяющей второй сегмент (LS2) линии с компенсирующим блоком (2), до точки (FB) повреждения второго сегмента (LS2) линии,
RFB - сопротивление пути повреждения,
 - полный ток повреждения,
- полный ток повреждения,
выражают переданное напряжение контура повреждения как уравнение:

где  - весовые коэффициенты, зависящие от типа повреждения, применяют модель линии с распределенными параметрами для определения симметричных составляющих напряжений из уравнения (20):
- весовые коэффициенты, зависящие от типа повреждения, применяют модель линии с распределенными параметрами для определения симметричных составляющих напряжений из уравнения (20):
где  - симметричные составляющие напряжения в точке Y, определенные в уравнениях (18а-18с);
- симметричные составляющие напряжения в точке Y, определенные в уравнениях (18а-18с);
 - симметричные составляющие тока в точке Y, определенные в уравнениях (14а-14с);
- симметричные составляющие тока в точке Y, определенные в уравнениях (14а-14с);
dFB - расстояние от конца В линии до повреждения (FB),
выражают полный ток повреждения (IFB)

где  - удельные коэффициенты, зависящие от типа повреждения, выводят на основе модели с распределенными параметрами поврежденной линии (3) передачи следующую формулу для i-й симметричной составляющей полного тока повреждения:
- удельные коэффициенты, зависящие от типа повреждения, выводят на основе модели с распределенными параметрами поврежденной линии (3) передачи следующую формулу для i-й симметричной составляющей полного тока повреждения:

где 
где i=1: прямая последовательность или i=2: обратная последовательность, получают полный ток повреждения как уравнение:

где  - величины, определенные в уравнении (23а),
- величины, определенные в уравнении (23а),
подставляют упомянутый выше полный ток повреждения в обобщенную модель контура повреждения (уравнение 19):

определяют расстояния dFB посредством решения уравнения:

11. Способ по п.10, в котором уравнение (26) раскладывают на действительную и мнимую части и решают посредством итерационного численного метода, такого как метод Ньютона-Рафсона, с использованием начальных точек, заданных уравнениями:

и

12. Способ по любому из предыдущих пп.1, 2, 5, 6, 8-11, в котором результат, считающийся правильным, определяют посредством отклонения результатов, имеющих отрицательное значение сопротивления повреждения, и/или посредством отклонения расстояния до повреждения, выходящего за пределы соответствующих диапазонов секции линии передачи, и/или посредством определения полных сопротивлений  источника и отклонения результатов, не имеющих характера R-X и по являющихся близкими к фактическому полному сопротивлению источника
источника и отклонения результатов, не имеющих характера R-X и по являющихся близкими к фактическому полному сопротивлению источника 
13. Способ по п.12, в котором полное сопротивление  источника получают посредством выведения напряжения обратной последовательности в точке (FA) повреждения относительно обоих выводов (А, В) как уравнения:
источника получают посредством выведения напряжения обратной последовательности в точке (FA) повреждения относительно обоих выводов (А, В) как уравнения:

где  - обратная последовательность падения напряжения на компенсирующем блоке (2), определенная на основе фазовых векторов этих падений напряжения в отдельных фазах а, b, с:
- обратная последовательность падения напряжения на компенсирующем блоке (2), определенная на основе фазовых векторов этих падений напряжения в отдельных фазах а, b, с:

причем полное сопротивление источника после этого получают посредством уравнения:

14. Способ по п.12, в котором полное сопротивление  источника получают посредством выведения напряжения обратной последовательности в точке (FB) повреждения относительно обоих выводов (A, В) как уравнения:
источника получают посредством выведения напряжения обратной последовательности в точке (FB) повреждения относительно обоих выводов (A, В) как уравнения:

где  - обратная последовательность падения напряжения на компенсирующем блоке (2), определенная на основе фазовых векторов этих падений напряжения в отдельных фазах а, b, с:
- обратная последовательность падения напряжения на компенсирующем блоке (2), определенная на основе фазовых векторов этих падений напряжения в отдельных фазах а, b, с: 
причем полное сопротивление источника после этого получают посредством уравнения:

15. Система (1) линии передачи, содержащая линию (3) передачи электроэнергии с продольной компенсацией с двумя выводами, содержащей первый вывод А и второй вывод В и дополнительно содержащей компенсирующий блок (2) для обеспечения продольной компенсации линии (3) передачи, причем компенсирующий блок (2) расположен между выводами (A, В), причем линия (3) передачи защищена на каждом выводе (A, В) линии передачи посредством соответствующего устройства (6а, 6b) определения местоположения повреждения, причем первое устройство (6а) определения местоположения повреждения размещено на выводе А линии передачи, и второе устройство (6b) определения местоположения повреждения размещено на выводе В линии передачи, причем каждое устройство (6а, 6b) определения местоположения повреждения содержит средство для выполнения способа по любому из пп.1-14, причем устройства (6а, 6b) для определения местоположения повреждения выполнены с возможностью детектировать повреждения в соответствии с:
определением местоположения повреждений на сегменте (LS1) линии передачи между выводом A и компенсирующим блоком (2) посредством
первой подпрограммы (SUB_A) устройства (6а) определения местоположения повреждения, размещенного на выводе А, и
третьей подпрограммы (SUB_AA) устройства (6b) определения местоположения повреждения, размещенного на выводе В, причем третья подпрограмма (SUB_AA) определяет местоположение повреждений способом, соответствующим второй подпрограмме (SUB_B),
определением местоположения повреждений на сегменте (LS2) линии передачи между выводом В и упомянутым компенсирующим блоком (2) посредством
второй подпрограммы (SUB_B) устройства (6b) определения местоположения повреждения, размещенного на выводе В, и
четвертой подпрограммы (SUB_BB) устройства (6b) определения местоположения повреждения, размещенного на выводе В, причем четвертая подпрограмма (SUB_BB) определяет местоположение повреждения способом, соответствующим первой подпрограмме (SUB_A).
16. Система (1) линии передачи по п.15, содержащая средство для идентификации, на каком сегменте (LS1, LS2) линии расположено повреждение, причем результаты расстояния до повреждения oт первой подпрограммы выбираются для повреждений на первом сегменте (LS1) линии, и результаты расстояния до повреждения от четвертой подпрограммы выбираются для повреждений на втором сегменте (LS2) линии.
17. Устройство (6) для определения местоположения повреждения в линии (3) передачи электроэнергии с продольной компенсацией с двумя выводами, содержащее блок обработки, отличающееся тем, что блок обработки выполнен с возможностью выполнять способ по любому из пп.1-14.
18. Устройство по п.17, содержащее дифференциальное реле тока для защиты линии (3) передачи.
19. Устройство, содержащее программное средство для выполнения этапов способа по любому из пп.1-14.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Способ очистки растворов сульфата цинка | 1972 |
|
SU528863A3 |
| US 6336059 B1, 01.01.2002 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ДВУСТОРОННИМ ПИТАНИЕМ | 1995 |
|
RU2107304C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО МЕСТА ОДНОФАЗНОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ В СЕТЯХ 6 - 35 КВ ЭЛЕКТРИЧЕСКИХ СИСТЕМ С ИЗОЛИРОВАННОЙ ИЛИ КОМПЕНСИРОВАННОЙ НЕЙТРАЛЬЮ (ВАРИАНТЫ) | 1994 |
|
RU2096795C1 |
| Способ стабилизации олефиновых и алкилароматических углеводородов | 1982 |
|
SU1089081A1 |

