Предпосылки создания изобретения
Область техники, к которой относится изобретение
Данное изобретение относится к электронному устройству, в котором с корпусом соединен с возможностью поворота подвижный блок.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Электронное устройство, такое как цифровой фотоаппарат или видеокамера, может включать в себя корпус и блок отображения, включающий в себя отображающую часть, такую как жидкокристаллический дисплей. Блок отображения соединен с корпусом и выполнен с возможностью поворота относительно корпуса вокруг первой оси и второй оси. Такой фотоаппарат может легко осуществлять фотографирование под различными углами за счет поворота блока отображения.
Однако при наличии такого электронного устройства на отображающей части не удается отобразить надлежащее изображение, пока форма отображения изображения, подлежащего отображению на отображающей части, не изменится в соответствии с состоянием поворота блока отображения.
То есть при наличии электронного устройства, в котором подвижный блок соединен с возможностью поворота с корпусом, приходится осуществлять управление в соответствии с состоянием или ориентацией подвижного блока относительно корпуса.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Один аспект данного изобретения представляет собой электронное устройство, включающее в себя корпус и подвижный блок, соединенный с корпусом, причем подвижный блок выполнен с возможностью поворота относительно корпуса вокруг первой оси и второй оси, которая перпендикулярна первой оси. Подвижный блок включает в себя первую часть, генерирующую магнитное поле, расположенную около первой оси, и вторую часть, генерирующую магнитное поле, расположенную в положении, в котором вторая часть, генерирующая магнитное поле, по существу, симметрична первой части, генерирующей магнитное поле, относительно второй оси. Корпус включает в себя первый датчик обнаружения магнитного поля, расположенный около положения, в котором первый датчик обнаружения магнитного поля обращен к одной из первой и второй частей, генерирующих магнитное поле, в состоянии, в котором подвижный блок поворачивается вокруг первой оси и приближается к корпусу, второй датчик обнаружения магнитного поля, расположенный около первой оси, и блок управления, конфигурация которого обеспечивает осуществление управления в соответствии с состоянием подвижного блока относительно корпуса на основании выходных сигналов первого и второго датчиков обнаружения магнитного поля.
Дополнительные признаки данного изобретения станут ясными из нижеследующего описания возможных вариантов осуществления, приводимого со ссылками на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 представлено перспективное изображение снаружи задней поверхности цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
На фиг.2А и 2В представлены изображения, показывающие диапазоны подвижности блока отображения цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
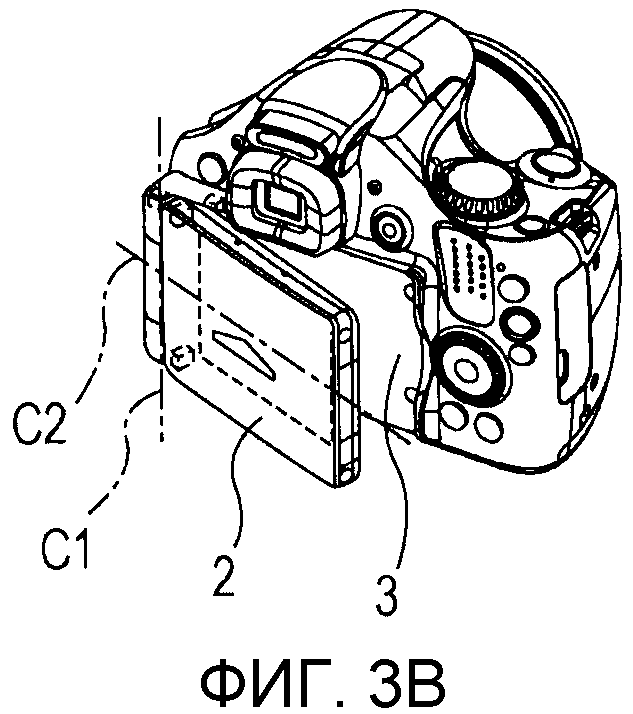
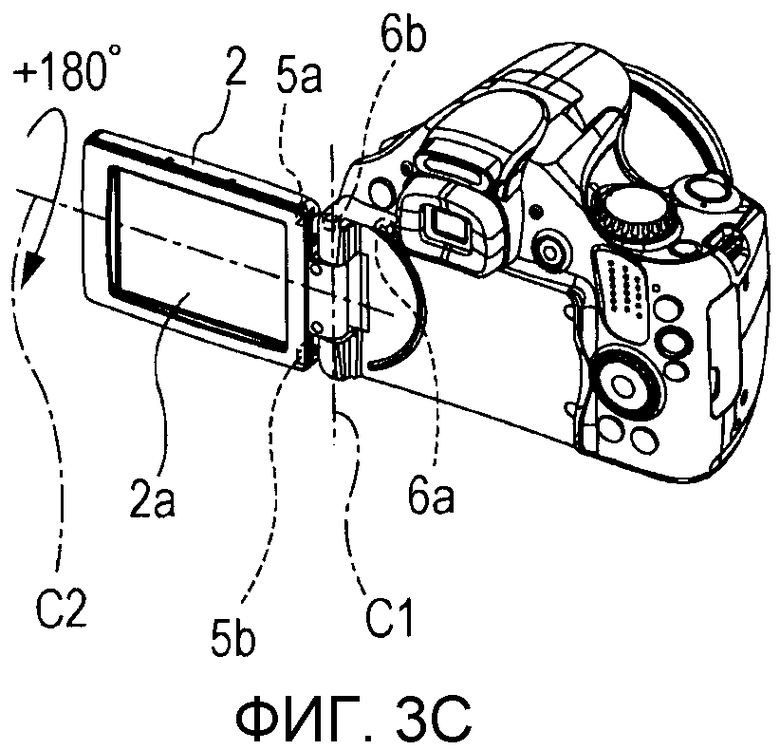
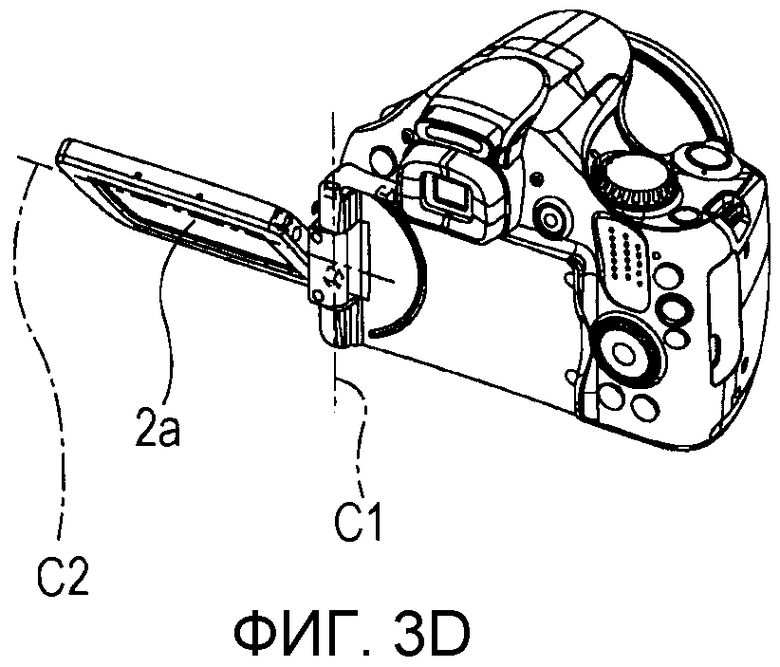
На фиг.3А-3D представлены изображения, показывающие состояния движения блока отображения цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
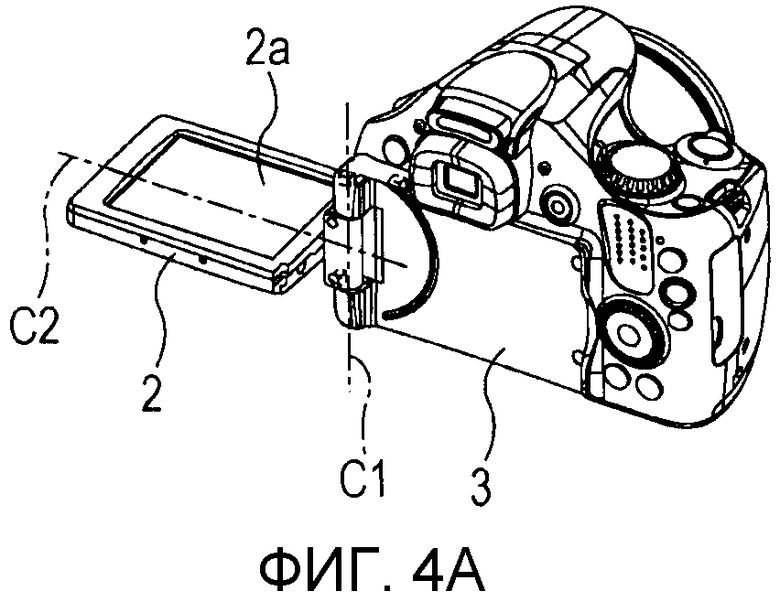
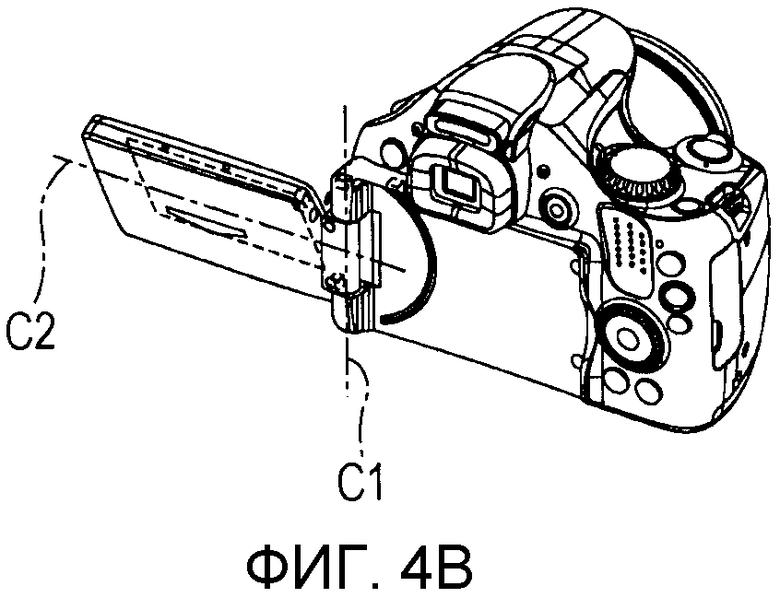
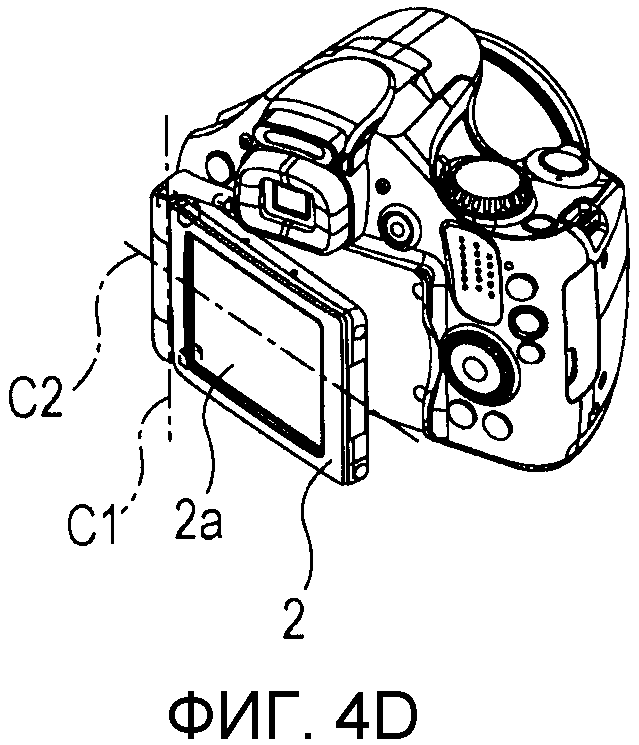
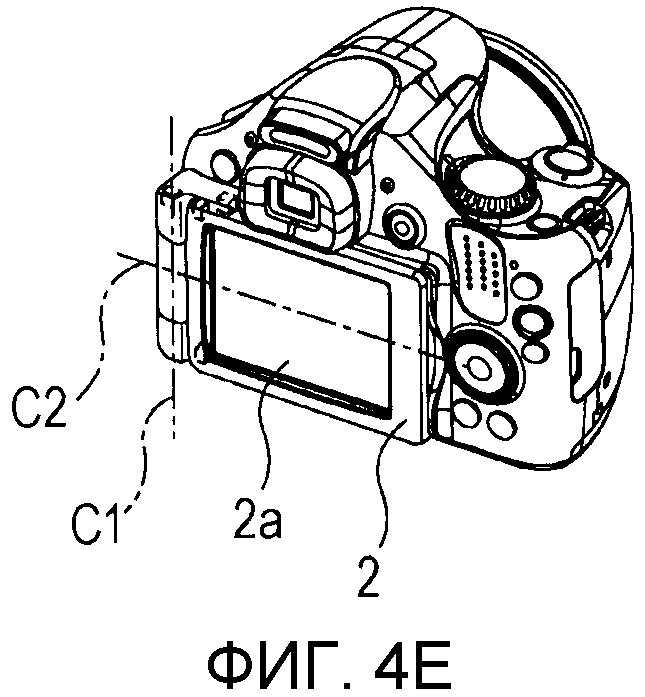
На фиг.4A-4E представлены изображения, показывающие состояния движения блока отображения цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
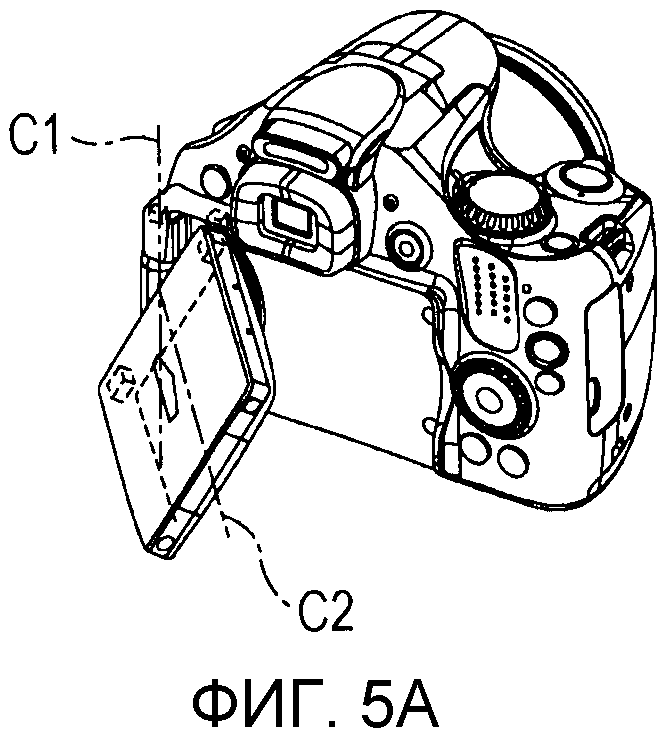
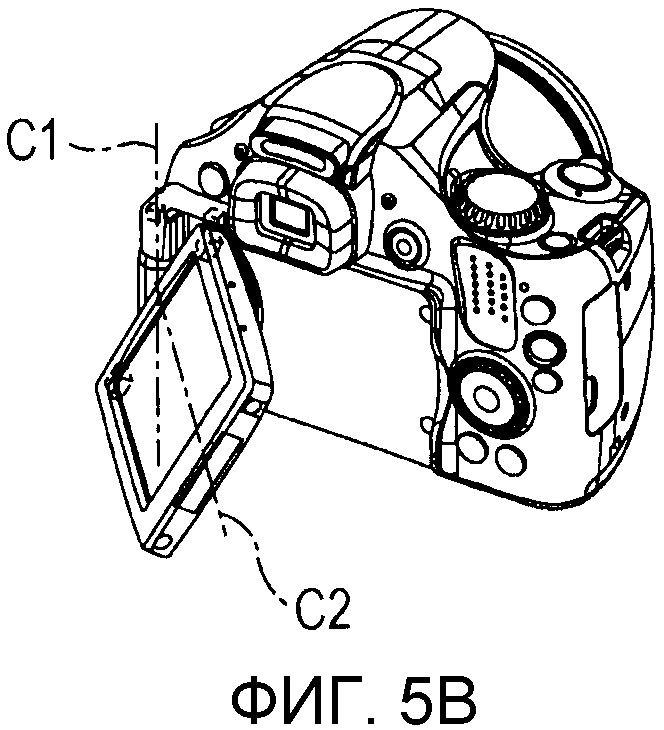
На фиг.5 и 5В представлены изображения, показывающие состояния движения блока отображения цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
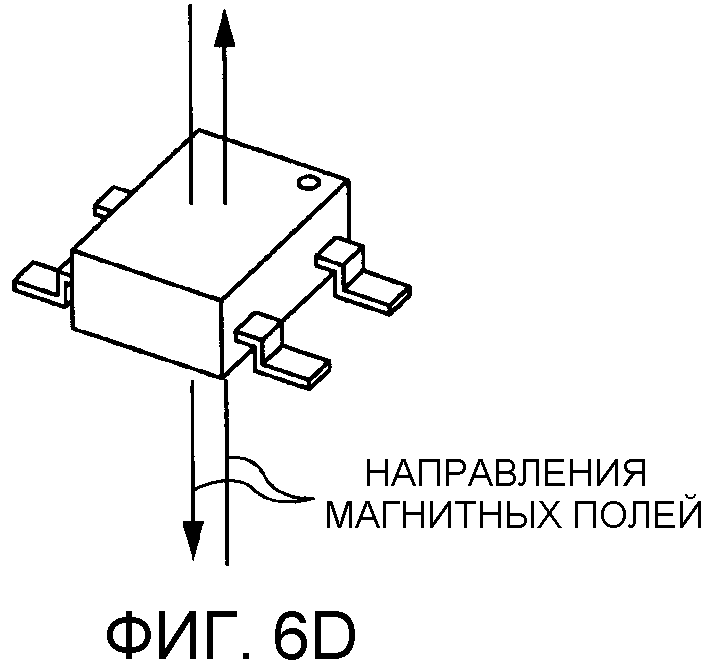
На фиг.6A-6D представлены изображения, поясняющие магнитные датчики цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
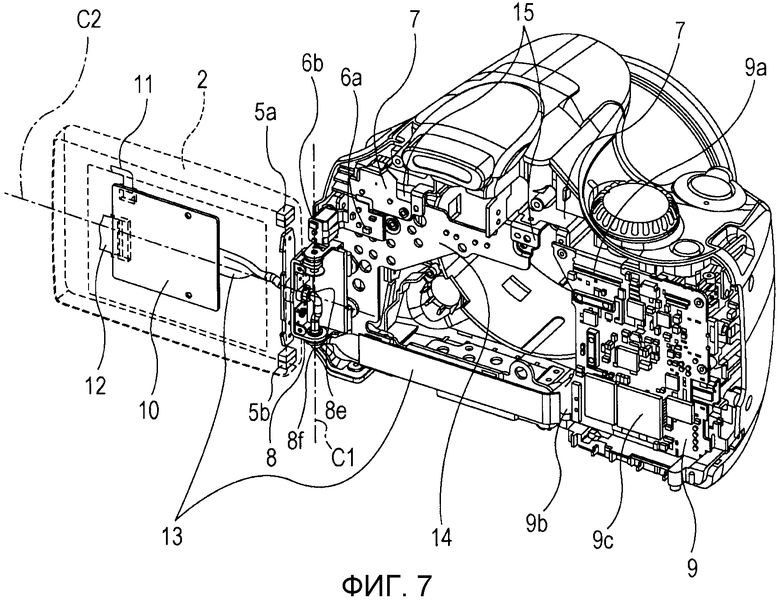
На фиг.7 представлено перспективное изображение снаружи задней поверхности цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения, когда блок задней крышки снят.
На фиг.8 представлено в увеличенном масштабе перспективное изображение области около петельной части цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения.
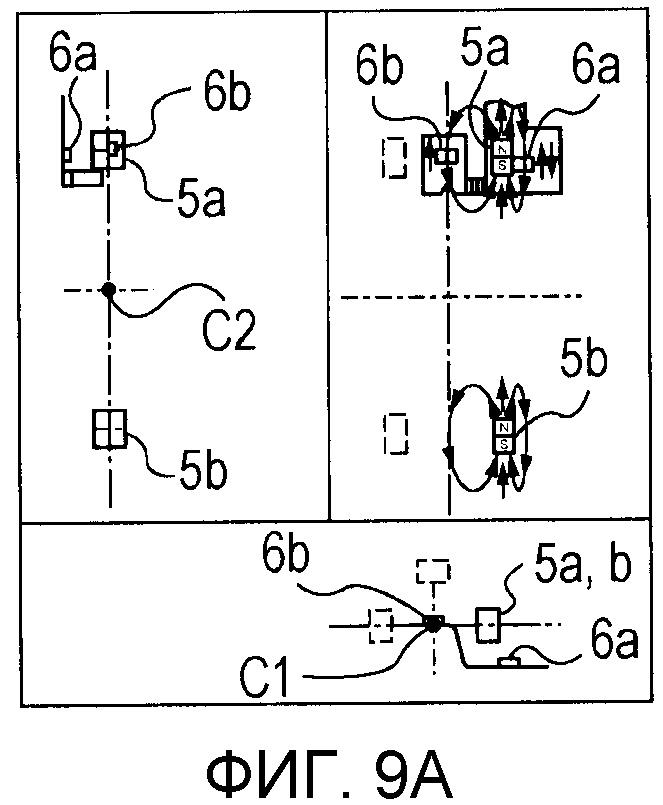
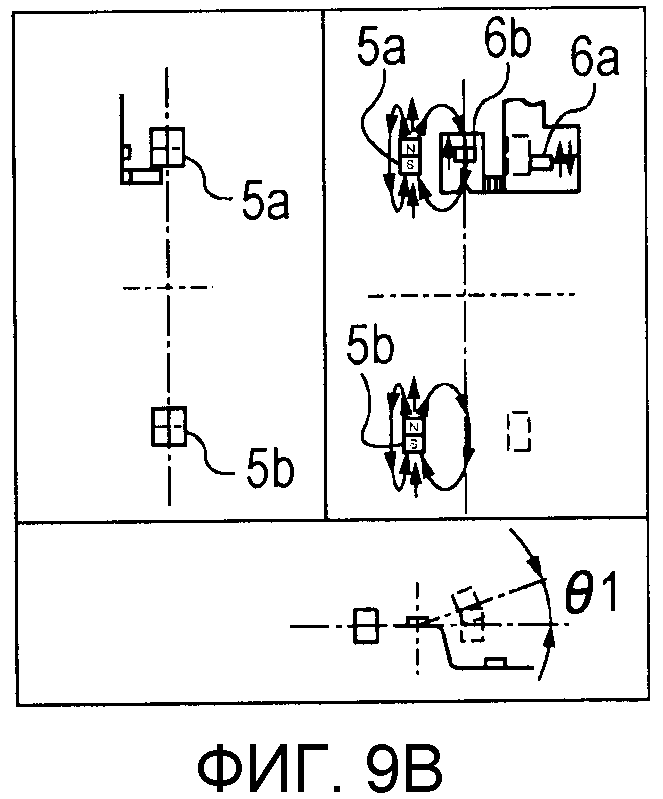
На фиг.9A-9F представлены трехвидовые изображения, каждое из которых показывает пример перехода позиционной взаимосвязи между магнитными датчиками и магнитами, когда блок отображения цифрового фотоаппарата в соответствии с вариантом осуществления данного изобретения движется.
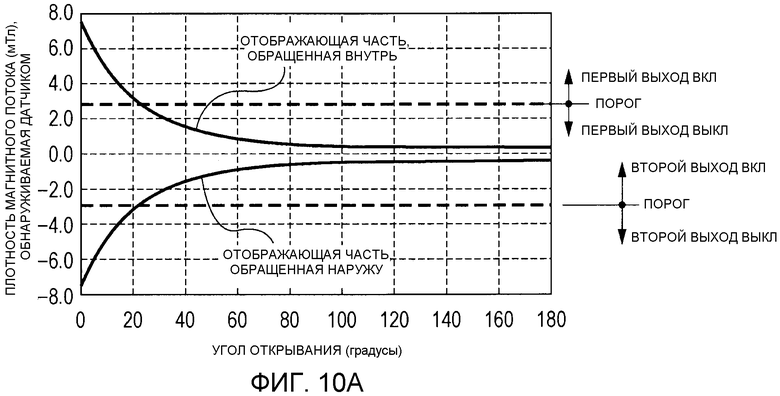
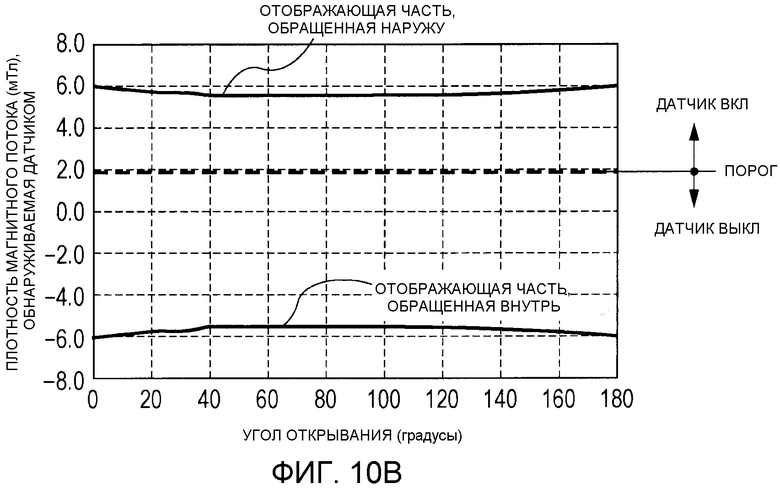
На фиг.10A-10B представлены виды, где показаны примеры переходов плотностей магнитных потоков, которые принимаются магнитными датчиками от магнитов в результате операции открывания и/или закрывания.
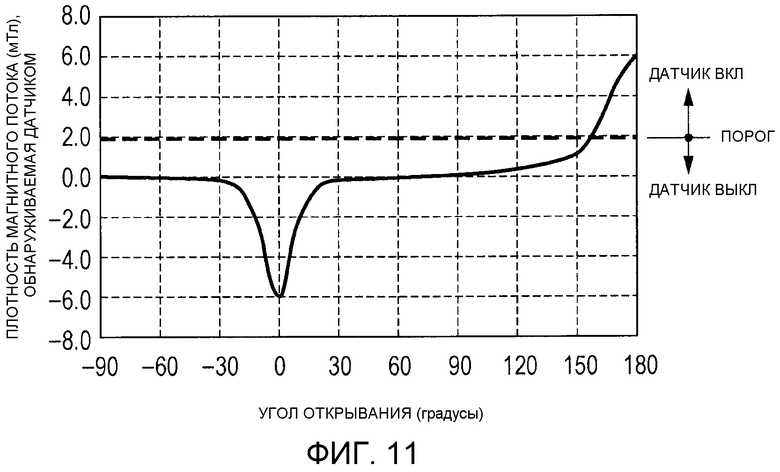
На фиг.11 представлено изображение, показывающее пример перехода плотности магнитного потока, которая принимается магнитным датчиком от магнита в результате операции поворота.
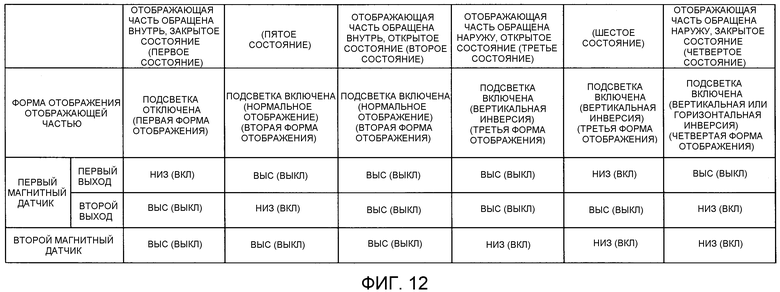
На фиг.12 представлено изображение, поясняющее изменение формы отображения на отображающей части на основании выходных сигналов магнитных датчиков.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже, со ссылками на прилагаемые чертежи будет описан вариант осуществления данного изобретения.
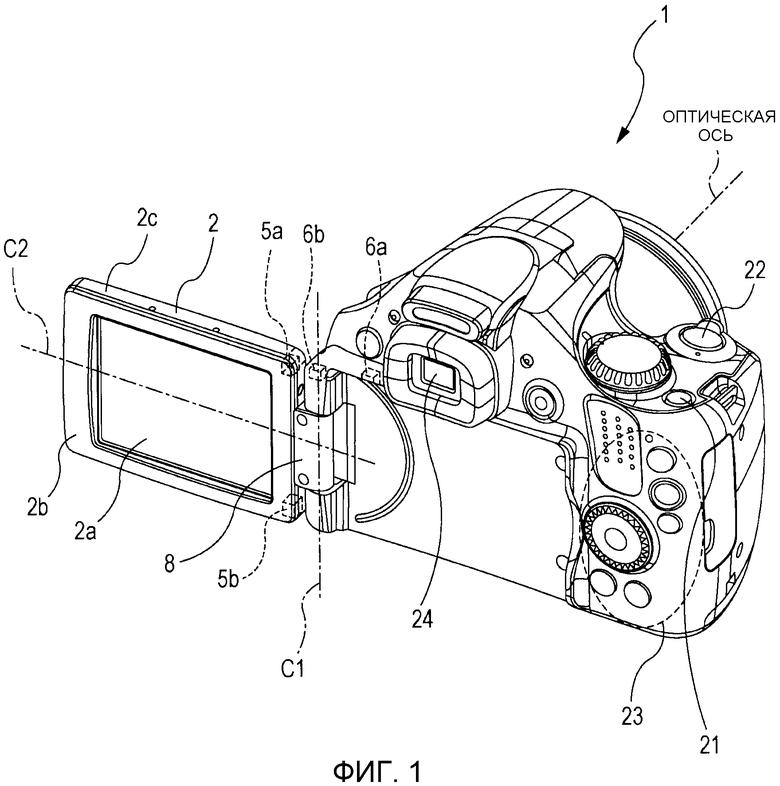
На фиг.1 представлено перспективное изображение снаружи задней поверхности (стороны фотографа) цифрового фотоаппарата, который представляет собой электронное устройство в соответствии с вариантом осуществления данного изобретения. На фиг.1 показано, что блок 2 отображения, который служит в качестве подвижного блока, соединен с корпусом 1 фотоаппарата, который служит в качестве корпуса, с возможностью поворота относительно корпуса 1 фотоаппарата вокруг первой оси C1 и второй оси C2. В нижеследующем описании, чтобы отличить операцию поворота блока 2 отображения вокруг первой оси С1 от операции поворота блока 2 отображения вокруг второй оси С2, операция поворота блока 2 отображения вокруг первой оси С1 будет время от времени именоваться операцией открывания и/или закрывания, а операция поворота блока 2 отображения вокруг второй оси С2 будет время от времени именоваться операцией поворота. Кроме того, угол, проходимый блоком 2 отображения в направлении поворота вокруг первой оси С1 относительно корпуса 1 фотоаппарата, время от времени будет именоваться углом открывания, а угол проходимый блоком 2 отображения в направлении поворота вокруг второй оси С2 относительно корпуса 1 фотоаппарата, время от времени будет именоваться углом поворота.
Отображающая часть 2а, такая как жидкокристаллический дисплей, отображает сфотографированное изображение и воспроизведенное изображение.
Отображающая часть 2a может также отображать условия фотографирования, такие как скорость затвора и диафрагменное число, количество сфотографированных изображений, меню и т.д. Для включения или выключения источника питания корпуса приводится в действие переключатель 21 источника питания корпуса. Чтобы начать операцию фотографирования, приводят в действие спусковой переключатель 22. Для исполнения различных операций приводятся в действие группа 23 рабочих кнопок.
На передней поверхности корпуса 1 фотоаппарата расположена фотографическая оптическая система, включающая в себя снимающий изображение элемент, такой как прибор с зарядовой связью (ПЗС). Фотографическая оптическая система формирует отображение объекта, которое входит в фотографическую оптическую систему в направлении оптическое оси, на снимающем изображение элементе. В режиме фотографирования, отображающая часть 2a может последовательно отображать захваченные изображения (также именуемые в дальнейшем изображением прямой передачи или изображением через объектив) на основании изображения объекта, сформированного на снимающем изображение элементе. Когда фотограф нажимает на спусковой переключатель 22 в желаемый момент, данные изображения, захваченные снимающим изображение элементом, обрабатываются различными средствами обработки изображения и сохраняется в блоке памяти. В режиме воспроизведения происходит считывание сохраненных данных, а управление отображающей частью 2a обеспечивает отображение изображения и информации.
Кроме того, путем отображения изображении прямой передачи или аналогичного изображение на видоискателе 24 в состоянии, в котором источник питания корпуса включен, а подсветка отображающей части 2a выключена, фотограф может проконтролировать объект или композицию, глядя через видоискатель 24.
Ниже описывается пример компоновки двух магнитных датчиков, предусмотренных в корпусе 1 фотоаппарата, и двух магнитов, предусмотренных в блоке 2 отображения.
Цифровой фотоаппарат (цифровая камера), показанный на фиг.1, находится в состоянии, в котором блок 2 отображения повернут относительно корпуса 1 фотоаппарата примерно на 180° вокруг первой оси C1 (это состояние является таким же, как состояние на фиг.3С, которая будет описана позже) из состояния, в котором отображающая часть 2a обращена к корпусу 1 фотоаппарата. Петельная часть 8 соединяет корпус 1 фотоаппарата с блоком 2 отображения. Петельная часть 8 включает в себя двухосный петельный механизм первой оси C1 и второй оси C2, так что блок 2 отображения можно поворачивать относительно корпуса 1 фотоаппарата. Вторая ось C2, по существу, перпендикулярна первой оси C1.
Для обнаружения операции открывания и/или закрывания либо открытого и/или закрытого состояния блока 2 отображения относительно корпус 1 фотоаппарата, используется первый магнитный датчик 6а, который является датчиком обнаружения магнитного поля.
Первый магнитный датчик 6a расположен около положения, в котором первый магнитный датчик 6a обращен к магниту 5a в состоянии, в котором блок 2 отображения поворачивается вокруг первой оси C1 и приближается к корпусу 1 фотоаппарата (в состоянии, показанном на фиг.3С, которая будет описана ниже).
Для обнаружения операции поворота либо состояния поворота блока 2 отображения относительно корпуса 1 фотоаппарата, используется второй магнитный датчик 6b, который является датчиком обнаружения магнитного поля и расположен в корпусе 1 фотоаппарата около первой оси C1. Этот вариант осуществления обеспечивает пример, в котором второй магнитный датчик 6b расположен на первой оси C1.
Хотя это подробнее описывается ниже, отметим, что первый и второй магнитные датчики расположены около петельной части 8 корпуса 1 фотоаппарата таким образом, что первый и второй магнитные датчики обнаруживают магнитные поля, параллельные первой оси C1.
Магнит 5a и магнит 5b, которые являются частями, генерирующими магнитное поле, состоят из магнитных деталей, имеющих одинаковую форму прямоугольного параллелепипеда и одинаковую магнитную силу. Магниты 5a и 5b расположены в блоке 2 отображения в положениях около петельной части 8 таким образом, что эти магниты 5a и 5b, по существу, симметричны относительно второй оси C2. Кроме того, магниты 5a и 5b расположены таким образом, что их северные полюса располагаются на верхней стороне, а их южные полюса располагаются на нижней стороне корпуса 1 фотоаппарата в состоянии, показанном на фиг.1, генерируя магнитные поля, по существу, параллельные первой оси C1. Иными словами, критические плоскости между северными полюсами и южными полюсами магнитов 5a и 5b, по существу, перпендикулярны первой оси Cl.
Блок 2 отображения включает передний кожух 2b, выполненный из синтетической смолы, и задний кожух 2c, выполненный из алюминиевого элемента. Следовательно, и передний кожух 2b, и задний кожух 2c являются немагнитными. Магниты 5a и 5b вставлены в выемки (не показаны), предусмотренные в переднем кожухе 2b, с высокой точностью позиционирования, закреплены клеем и накрыты задним кожухом 2с, чтобы предотвратить выпадение магнитов 5a и 5b. Когда блок 2 отображения поворачивают вокруг первой оси C1 и второй оси C2, магниты 5a и 5b тоже соответственно движутся. Выступ (не показан), предусмотренный в переднем кожухе 2b, входит в зацепление с выемкой (которая будет описана позже) формирующего элемента петельной части 8 с высокой точностью, и крепится винтом. Таким образом, блок 2 отображения, включающий в себя отображающую часть 2a и магниты 5a и 5b поворачивается как цельный блок.
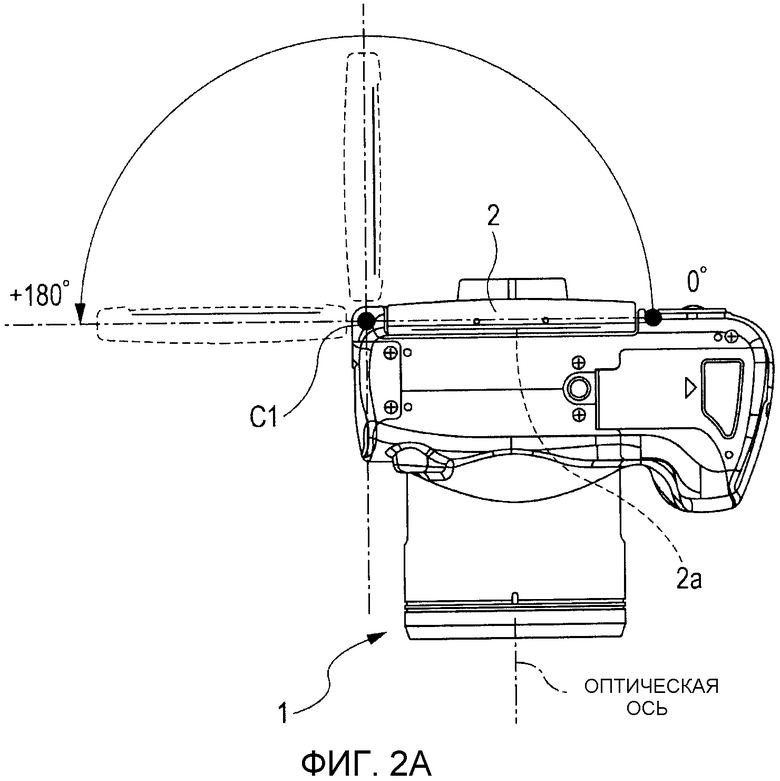
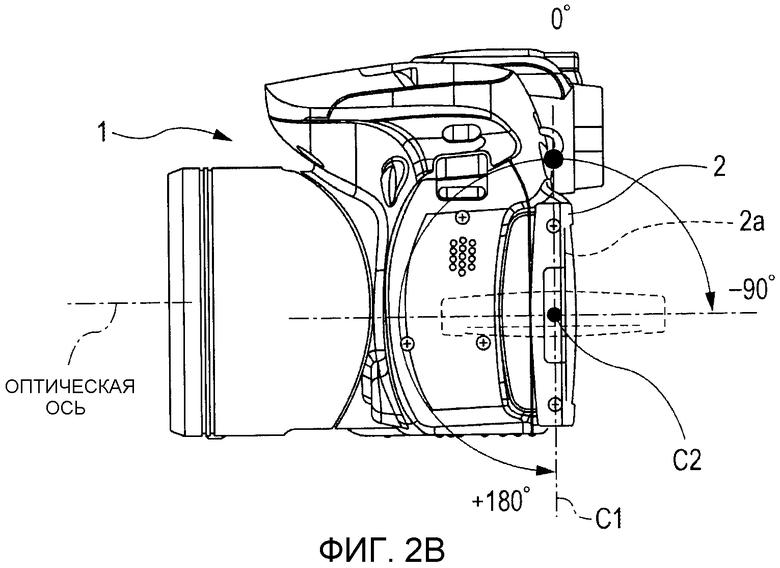
Далее, со ссылками на фиг.2A и 2B, будут описаны диапазоны подвижности блока 2 отображения относительно корпуса 1 фотоаппарата при взгляде от нижней поверхности и боковой поверхности цифрового фотоаппарата в соответствии с этим вариантом осуществления.
На фиг.2А представлен вид снаружи, рассматриваемый от нижней поверхности корпуса 1 фотоаппарата. Как описано ниже, блок 2 отображения можно поворачивать вокруг первой оси С1 на угол от 0° до примерно 180°. На фиг.2B представлен вид сбоку, когда блок 2 отображения, показанный на фиг.2А, повернут примерно на 180° вокруг первой оси C1. Блок 2 отображения можно также поворачивать из состояния, показанного на фиг.2B, в диапазоне от примерно -90° до примерно +180° вокруг второй оси C2. В этом варианте осуществления, в состоянии, показанном на фиг.2B, поворот блока 2 отображения против часовой стрелки вокруг второй оси C2 представляет собой поворот в положительном направлении, а поворот блока 2 отображения по часовой стрелке вокруг второй оси C2 представляет собой поворот в отрицательном направлении.
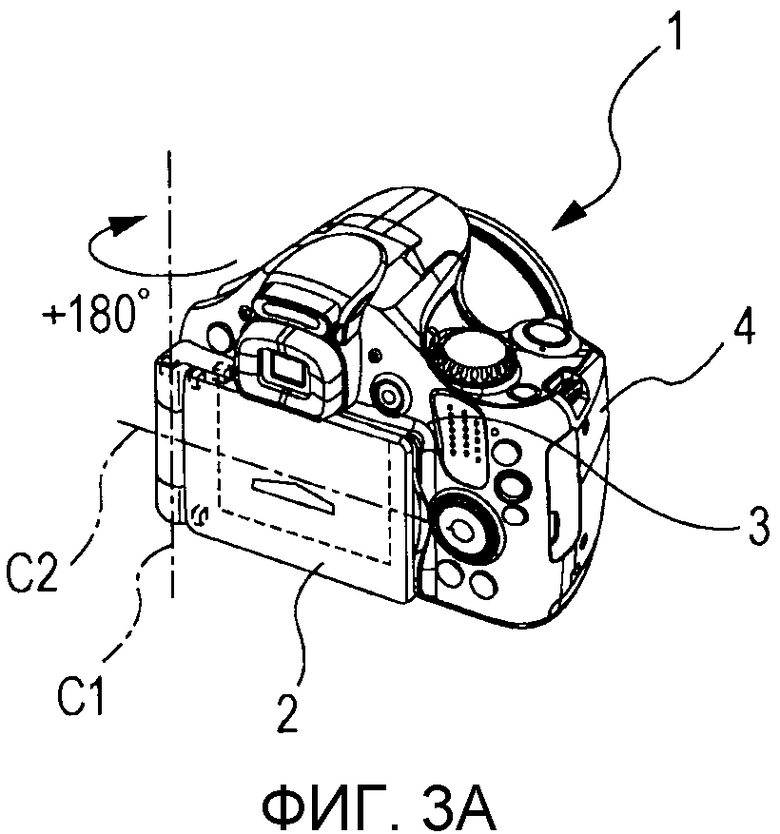
Далее, со ссылками на фиг.3А-3D и 4A-4E, будут описаны состояния движения блока 2 отображения относительно корпуса 1 фотоаппарата. Как показано на фиг.3А-3D и 4A-4E, в цифровом фотоаппарате согласно этому варианту осуществления блок 2 отображения, включающий в себя отображающую часть 2a на задней поверхности корпуса 1 фотоаппарата, соединен с корпусом 1 фотоаппарата с возможностью поворота в диапазоне от 0° до примерно 180° вокруг первой оси C1. Блок 2 отображения заключен в выемке, которая сформирована в задней крышке 3, расположенной на задней поверхности корпуса 1 фотоаппарата, когда угол открывания блока 2 отображения составляет 0° (полностью закрытое состояние).
Кроме того, блок 2 отображения соединен с корпусом 1 фотоаппарата с возможностью поворота относительно корпуса 1 фотоаппарата в диапазоне между примерно 180° в положительную сторону и примерно 90° в отрицательную сторону вокруг второй оси C2. Задняя крышка 3 и передняя крышка 4 корпуса 1 фотоаппарата выполнены из немагнитных или слабомагнитных элементов.
Далее будет подробно описан переход состояния, когда режим является режимом фотографирования, блок питания корпуса включен, а блок 2 отображения движется относительно корпуса 1 фотоаппарата. Блок 2 отображения можно поворачивать относительно корпуса 1 фотоаппарата посредством двухосного петельного механизма первой оси C1 и второй оси C2. В исходном состоянии, показанном на фиг.3А, отображающая часть 2a обращена внутрь, т.е. отображающая часть 2a обращена к корпусу 1 фотоаппарата, а блок 2 отображения имеет угол открывания 0°. Вряд ли в этом состоянии фотограф будет контролировать отображаемое содержимое отображающей части 2a. Поэтому подсветка отображающей части 2a отключена, а отображающая часть 2a ничего не отображает. На фиг.3B представлено состояние во время поворота (открывания) блока 2 отображения вокруг первой оси C1. Когда блок 2 отображения поворачивается на заранее определенный угол вокруг первой оси C1, обнаруживается, что блок 2 отображения находится в состоянии открывания, которое будет описано позже, и тогда подсветка отображающей части 2a включается. В это время отображающая часть 2a отображает изображение прямой передачи, которое формируется на снимающем изображение элементе, таком как ПЗС, посредством фотографической оптической системы (не показана). В этом варианте осуществления, вертикальное и горизонтальное направления изображения, отображаемого на отображающей части 2a, относительно блока 2 отображения в этом состоянии представляют нормальное состояние. Отображение изображения в нормальном состоянии является нормальным отображением. На фиг.3C представлено состояние, в котором блок 2 отображения повернут примерно на 180° вокруг первой оси C1 (полностью открытое состояние). Блок 2 отображения можно поворачивать из этого состояния в диапазоне между примерно -90° и примерно +180° вокруг второй оси C2. Например, как показано на фиг.3D, в состоянии, в котором блок 2 отображения повернут примерно на -45°, фотограф легко сможет проконтролировать объект или композицию на экране фотографирования во время фотографирования с большим углом, как бывает, когда фотограф не может посмотреть через видоискатель 24.
На фиг.4A представлено состояние, в котором блок 2 отображения повернут вокруг второй оси C2 примерно на +90° из состояния, показанного на фиг.3C. Фотограф легко сможет проконтролировать объект или композицию на экране фотографирования во время фотографирования с малым углом.
Затем, когда блок 2 отображения поворачивается в положительном направлении вокруг второй оси C2 из состояния, показанного на фиг.4A, обнаруживается, что блок 2 отображения поворачивается в положительном направлении на заранее определенный или больший угол в состоянии, показанном на фиг.4B, которое будет описано позже. На отображающей части 2а отображается изображение, которое вертикально инвертировано из нормального состояния. Потом это состояние переходит в состояние, показанное на фиг.4C, в котором блок 2 отображения повернут в положительном направлении вокруг второй оси C2 примерно на +180° и при этом поддерживается вертикальная инверсия отображенного изображения. В этом состоянии направление фотографирования фотографической оптической системы является таким же, как направление отображения отображающей части 2a. Следовательно, это состояния оказывается подходящим для того, чтобы фотограф мог сфотографировать сам себя, т.е. самосъемки.
Когда блок 2 отображения поворачивается вокруг первой оси C1, приближаясь к корпусу 1 фотоаппарата из состояния, показанного на фиг.4C, состояние становится состоянием, показанным на фиг.4D. При этом обнаруживается, что блок 2 отображения находится в закрытом состоянии, которое будет описано позже, а на отображающей части 2a отображается изображение, которое является вертикально и горизонтально инвертированным из нормального состояния. Когда блок 2 отображения поворачивается, продолжая сближаться с корпусом 1 фотоаппарата, состояние становится полностью закрытым состоянием, показанным на фиг.4E, и блок 2 отображения запирается относительно корпуса 1 фотоаппарата упругим запорным механизмом. На фиг.4E представлено полностью закрытое состояние (угол открывания составляет 0°) с обращенной перед отображающей частью 2a. В этом состоянии, подобно цифровому фотоаппарату, в котором отображающая часть 2a крепится к задней поверхности корпуса 1 фотоаппарата, можно проконтролировать объект или композицию на экране фотографирования от задней поверхности корпуса 1 фотоаппарата. Поэтому фотограф может легко отслеживать движущийся объект.
Как описано выше, в этом варианте осуществления обнаруживаются операция открывания и/или закрывания и операция поворота блока 2 отображения, а форма отображения на отображающей части 2a надлежащим образом переходит, например, из состояния выключения подсветки в состояние включения подсветки (нормальное отображение) состояние включения подсветки (вертикальная инверсия) и состояние включения подсветки (вертикальная и/или горизонтальная инверсия).
Во время перехода из состояния, показанного на фиг.3B в состояние, показанное на фиг.3C, когда блок 2 отображения поворачивается в отрицательном направлении вокруг второй оси C2, состояние становится состоянием, показанным на фиг.5A. Кроме того, во время перехода из состояния, показанного на фиг.4C, в состояние, показанное на фиг.4D, когда блок 2 отображения поворачивается в отрицательном направлении вокруг второй оси C2, состояние становится состоянием, показанным на фиг.5B.
В этом варианте осуществления определяется, что направление отображающей части 2a соответствует одному из двух состояний, включая направление, в котором отображающая часть 2a обращена к корпусу 1 фотоаппарата в полностью закрытом состоянии (направление внутрь), и направление, в котором отображающая часть 2a обращена к стороне, противоположной корпусу 1 фотоаппарата (направление наружу). В этом варианте осуществления даже в состоянии, в котором отображающая часть 2a обращена к фотографу, подобно состоянию, показанному на фиг.3C, направление отображающей части 2a предполагается являющимся направлением внутрь, если блок 2 отображения не повернут на заранее определенный или больший угол вокруг второй оси C2 от направления, в котором отображающая часть 2a обращена к корпус 1 фотоаппарата в полностью закрытом состоянии.
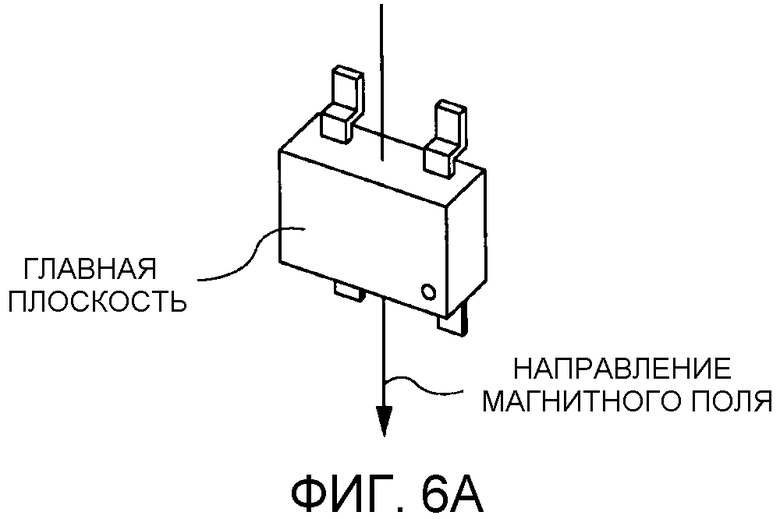
Далее, со ссылками на фиг.6A-6D, будет описан магнитный датчик, используемый для обнаружения операции поворота блока 2 отображения. В общем случае, элементом, который обнаруживает магнетизм, может быть, например, элемент с гигантским магнитосопротивлением (ГМС) или полупроводниковый элемент Холла.
Элемент с ГМС - это устройство, которое обнаруживает магнитное поле, параллельное главной плоскости, за счет использования эффекта магнитосопротивления. Элемент с ГМС выполнен из сплава, имеющего такую характеристику, что электрическое сопротивление увеличивается по мере усиления магнитного поля (в частности - из сплава, содержащего никель, железо и кобальт). Для создания датчика с ГМС используют одиночный элемент с ГМС или множество элементов с ГМС и устанавливают решающую схему.
На фиг.6A изображен однополярный датчик с ГМС, имеющий один выход, который обнаруживает магнитное поле только в одном направлении. Например, когда порог плотности магнитного потока, пронизывающего датчик с ГМС, составляет 2 мТл, если плотность магнитного потока выше порога, то выдается сигнал низкого уровня (включения) (сигнал НИЗ (ВКЛ)), а если плотность магнитного потока ниже порога, то выдается сигнал высокого уровня (выключения) (сигнал ВЫС (ВЫКЛ)). В случае однополярного датчика с ГМС, имеющего один выход, даже несмотря на то, что этот датчик принимает значение 2 мТл или выше, если направление магнитного поля является противоположным, то датчик выдает сигнал ВЫС (ВЫКЛ).
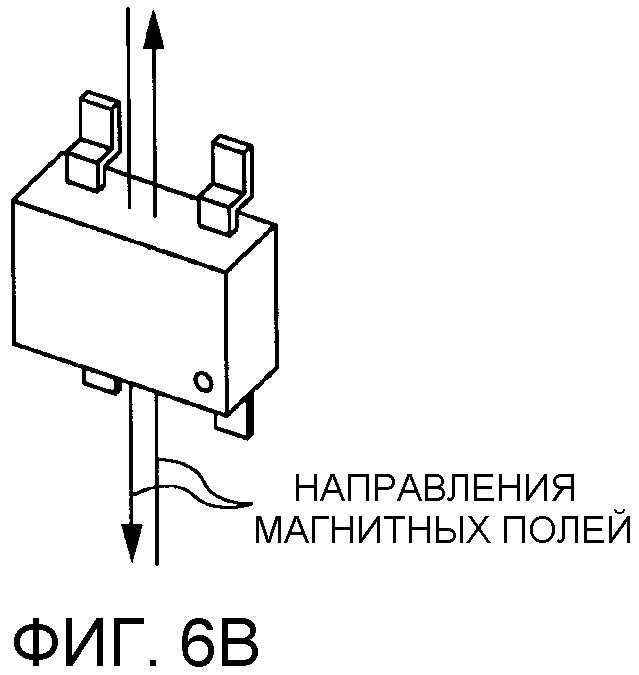
На фиг.6B изображен двухполярный датчик с ГМС, имеющий два выхода, который обнаруживает магнитные поля в двух направлениях. Например, когда порог плотности магнитного потока, пронизывающего датчик с ГМС, составляет 3 мТл, если плотность магнитного потока выше порога, то выдается сигнал НИЗ (ВКЛ), а если плотность магнитного потока ниже порога, то выдается сигнал ВЫС (ВЫКЛ). В случае двухполярного датчика с ГМС, имеющего два выхода, два датчика, которые обнаруживают магнитные поля, расположены в противоположных направлениях. Если плотность магнитного потока выше 3 мТл, то один из датчиков выдает сигнал НИЗ (ВКЛ), а другой из датчиков выдает сигнал ВЫС (ВЫКЛ). Когда направления магнитных полей изменяются на противоположные, выходные сигналы инвертируются.
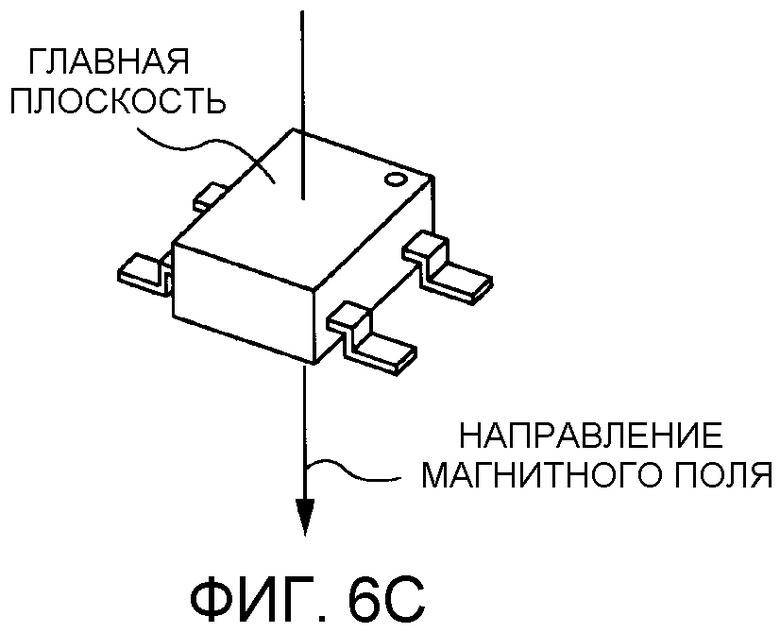
В отличие от этого, элемент Холла - это устройство, которое обнаруживает магнитное поле, перпендикулярное главной плоскости, за счет использования эффекта Холла. Для создания датчика Холла используют одиночный элемент Холла или множество элементов Холла и устанавливают решающую схему.
На фиг.6C изображен однополярный датчик Холла, имеющий один выход, который обнаруживает магнитное поле только в одном направлении, перпендикулярном главной плоскости. Например, когда порог плотности магнитного потока, пронизывающего датчик Холла, составляет 2 мТл, если плотность магнитного потока выше порога, то выдается сигнал НИЗ (ВКЛ), а если плотность магнитного потока ниже порога, то выдается сигнал ВЫС (ВЫКЛ). В случае однополярного датчика Холла, имеющего один выход, даже несмотря на то, что этот датчик принимает значение 2 мТл или выше, если направление магнитного поля является противоположным, то датчик выдает сигнал ВЫС (ВЫКЛ).
На фиг.6D изображен двухполярный датчик Холла, имеющий два выхода, который обнаруживает магнитные поля в двух направлениях, перпендикулярных главной плоскости. Например, когда порог плотности магнитного потока, пронизывающего датчик Холла, составляет 3 мТл, если плотность магнитного потока выше порога, то выдается сигнал НИЗ (ВКЛ), а если плотность магнитного потока ниже порога, то выдается сигнал ВЫС (ВЫКЛ).
В одном случае двухполярного датчика Холла, имеющего два выхода, два датчика, которые обнаруживают магнитные поля, расположены в противоположных направлениях. Если плотность магнитного потока выше 3 мТл, то один из датчиков выдает сигнал НИЗ (ВКЛ), а другой из датчиков выдает сигнал ВЫС (ВЫКЛ). Когда направления магнитных полей изменяются на противоположные, выходные сигналы инвертируются.
Таким образом, магнитный датчик можно выбрать в соответствии с направлением относительно главной плоскости, в которой магнитный датчик может обнаруживать магнитный поток, и в зависимости от того, одну полярность или две полярности имеет магнитный датчик. Выбирая высокую чувствительность или низкую чувствительность в зависимости от места применения, магнитный датчик можно использовать с помощью различных способов использования. В этом варианте осуществления главная плоскость магнитного датчика указывает верхнюю поверхность магнитного датчика, когда его нижняя поверхность установлена на подложке.
В этом варианте осуществления первый магнитный датчик, используемый для обнаружения открывания и/или закрывания, является двухполярным датчиком с ГМС, имеющим два выхода, с порогом 3 мТл, а второй магнитный датчик, используемый для обнаружения поворота, является однополярным датчиком с ГМС, имеющим один выход, с порогом 2 мТл. На фиг.7 представляет собой изображение цифрового фотоаппарата согласно этому варианту осуществления в состоянии, показанном на фиг.1, когда задняя крышка 3 снята, для пояснения внутренней конфигурации цифрового фотоаппарата. Контур блока 2 отображения обозначен пунктирными линиями.
Магнитные датчики 6a и 6b установлены на гибкой печатной плате (ГПП) 7 верхней поверхности. Основное шасси 14 и шасси 15 верхней поверхности выполнены из металлических элементов, потому что основное шасси 14 и шасси 15 верхней поверхности должны иметь определенные прочности как составляющие основного кожуха корпуса 1 фотоаппарата. В этом варианте осуществления, основное шасси 14 и шасси 15 верхней поверхности расположены около магнитных датчиков. Поэтому в основном шасси 14 и шасси 15 верхней поверхности используется нержавеющая сталь, представляющая собой немагнитный металлический элемент применительно к влиянию возмущения магнитных полей и намагничиванию. ГПП 7 верхней поверхности расположена на шасси 15 верхней поверхности и прикреплена к нему. Шасси 15 верхней поверхности расположено на основном шасси 14 и прикреплено к нему. На ГПП 7 верхней поверхности установлены рабочие переключатели, схемы и электрические части для стробоскопической подсветки. ГПП 7 верхней поверхности соединена с основной платой 9 посредством гибкого соединителя 9a.
На основной плате 9 расположен центральный процессор (ЦП) 9c. ЦП 9c управляет соответствующими частями цифрового фотоаппарата в соответствии с этим вариантом осуществления, а значит - осуществляет управление в соответствии с состоянием движения блока 2 отображения относительно корпуса 1 фотоаппарата на основании выходных сигналов первого и второго магнитных датчиков.
Жгут 13 проводов представляет собой соединительную шину, включающую в себя группу мелких соосных шин. Жгут 13 проводов электрически соединяет подложку 10 жидкокристаллического дисплея (ЖКД), встроенную в блок 2 отображения, с соединителем 9b жгута, расположенным на основной плате 9. Жгут 13 проводов продет сквозь два отверстия 8e и 8f, предусмотренных в петельной части 8. Поэтому количество проводов минимизировано, и размеры отверстий минимизированы, чтобы уменьшить габариты петельной части 8. Подложка 10 жидкокристаллического дисплея (ЖКД) и жгут 13 проводов соединены друг с другом посредством соединителя (не показан). Позиция 12 обозначает часть ГПП, соединенную с ЖКД, который является устройством отображения. Позиция 11 обозначает часть ГПП, соединенную со средством задней подсветки устройства отображения.
Жгут 13 проводов расположен около петельной части 8 таким образом, что проходит через положение, где нет первого магнитного датчика 6a или второго магнитного датчика 6b. Кроме того, жгут 13 проводов входит в петельную часть 8 в положении на первой оси C1 корпуса 1 фотоаппарата со стороны, где нет второго магнитного датчика 6b. Соответственно, пространство вокруг петельной части 8 используется эффективно, а жгут 13 проводов не перекрывает магнитные датчики.
На фиг.8 представлено в увеличенном масштабе перспективное изображение, где показана область около петельной части 8, изображенной на фиг.7. Для удобства описания, внешние крышки корпуса 1 фотоаппарата не показаны.
Элемент 15а для крепления датчика выполнен из немагнитного материала на основе синтетической смолы, расположен на шасси 15 верхней поверхности и прикреплен к нему. Элемент на основе синтетической смолы предусмотрен для крепления магнитного датчика с целью предотвращения появления возмущения магнитных полей из-за расположения этого элемента непосредственно под вторым магнитным датчиком с высокой чувствительностью. Часть для крепления магнитного датчика может быть выполнена как единое целое с шасси 15 верхней поверхности за счет изгиба с приданием Z-образной формы. Однако если шасси 15 верхней поверхности изогнуто, нержавеющая сталь может стать мартенситной и стать легко намагничиваемой. Это может возмущать магнитные поля около магнитного датчика, возможным результатом чего является ошибочное обнаружение. Чтобы предотвратить это, в качестве элемента для крепления магнитного датчика используется немагнитный элемент на основе синтетической смолы.
Второй магнитный датчик 6b расположен около первого магнитного датчика 6a. Соответственно, можно уменьшить размеры формы ГПП 7 верхней поверхности, получаемые при развертывании этой формы в плоскость. Уменьшение размеров выгодно и в контексте стоимости.
Далее будет описана конфигурация петельной части 8. Петельная часть 8 включает в себя главным образом металлическую пластину 8а основания, металлическую пластину 8b и металлическую пластину 8c. Петельная часть 8 выполнена из металлических элементов с высокими интенсивностями. Кроме того, петельная часть 8 включает в себя пружину кручения, которая генерирует крутящий момент скольжения во время поворота, стопорный элемент, который ограничивает поворот, и т.д. Эти петлеобразующие элементы включают в себя элементы, выполненные из магнитных тел и вследствие этого расположенные так, чтобы не возмущать магнитные поля. Металлическая пластина 8a основания расположена с высокой точностью на основное шасси 14 и прикреплена к нему. Кроме того, металлическая пластина 8c имеет выемку 8d. Выемка 8d входит в зацепление с выступом переднего кожуха 2b блока 2 отображения, как описано выше.
Далее будет описана компоновка магнитов 5a и 5b. Магниты 5a и 5b расположены в блоке 2 отображения таким образом, когда блок 2 отображения находится в полностью закрытом состоянии, а отображающая часть 2a обращена внутрь, северные полюса магнитов 5a и 5b находятся на верхней стороне корпуса фотоаппарата, а южные полюса находятся на нижней стороне. На фиг.8, возможные магнитные линии силы, генерируемой из соответствующих магнитов, обозначены стрелками, начинающимися в положениях около магнитных полюсов.
Кроме того, возможные направления магнитных полей, которые обнаруживаются соответствующими магнитными датчиками, обозначены на фиг.8 стрелками в положениях около первого магнитного датчика 6a и второго магнитного датчика 6b. Поскольку в качестве первого магнитного датчика 6a используется двухполярный датчик с ГМС, имеющий два выхода, первый магнитный датчик 6a может выдавать сигнал, получаемый путем обнаружения магнитного поля, которое параллельно первой оси C1 и направлено от верхней стороны к нижней стороне фотоаппарата, и сигнал, получаемый путем обнаружения магнитного поля, которое параллельно первой оси C1 и направлено от нижней стороны к верхней стороне. Например, когда блок 2 отображения поворачивается в направлении закрывания вокруг первой оси C1, а магнит 5a приближается к первому магнитному датчику 6a, магнитное поле, генерируемое из магнита 5a и направляемое от верхней стороны к нижней стороне, начинает пронизывать первый магнитный датчик 6a. Тогда, если плотность магнитного потока превышает порог, происходит изменение уровня первого выхода (выходного сигнала, характеризующего результат обнаружения магнитного поля, направленного от верхней стороны к нижней стороне) первого магнитного датчика 6a, с ВЫС (высокое) на НИЗ (низкое). В отличие от этого, уровень второго выхода (выходного сигнала, характеризующего результат обнаружения магнитного поля, направленного от нижней стороны к верхней стороне) - это уровень ВЫС, который не изменяется, так как направление магнитного поля является противоположным. Как описано выше для результата обнаружения первым магнитным датчиком 6a, первый результат обнаружения изменяется с ВЫКЛ на ВКЛ, а второй результат обнаружения принимает значение ВКЛ, и он не изменяется.
В состоянии, показанном на фиг.8, плотность магнитного потока магнитного поля пронизывающего второй магнитный датчик 6b, является пороговой или большей. Вместе с тем, поскольку второй магнитный датчик 6b представляет собой однополярный датчик с ГМС, направление магнитного поля, пронизывающего второй магнитный датчик 6b, отличается от направления, в котором может обнаруживать второй магнитный датчик 6b, и поэтому он не обнаруживает магнитное поле. То есть на выходе второго магнитного датчика 6b имеем уровень ВЫС (высокий) без изменения, а результат обнаружения - ВЫКЛ (выключено). Вместе с тем, если блок 2 отображения поворачивается примерно на +180° вокруг второй оси C2 из состояния, показанного на фиг.8, магнит 5b приближается ко второму магнитному датчику 6b. Магнитное поле, генерируемое из магнита 5b, пронизывает второй магнитный датчик 6b. В этом случае, магнитное поле, сформированное магнитом 5b направлено от нижней стороны к верхней стороне фотоаппарата, а плотность магнитного потока превышает порог второго магнитного датчика 6b. Соответственно, выходной сигнал второго магнитного датчика 6b изменяется с ВЫС (высокий) на НИЗ (низкий), а результат обнаружения изменяется с ВЫКЛ (выключено) на ВКЛ (включено).
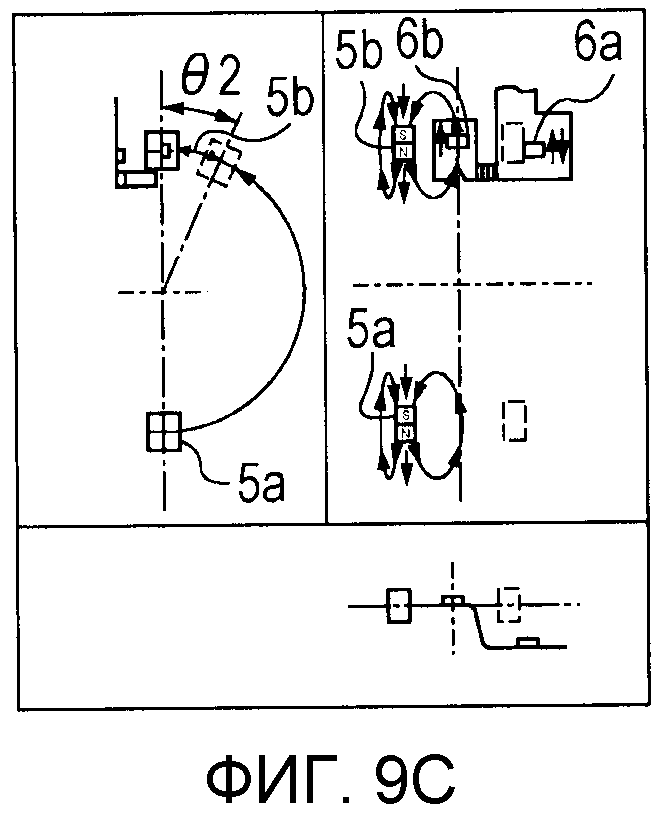
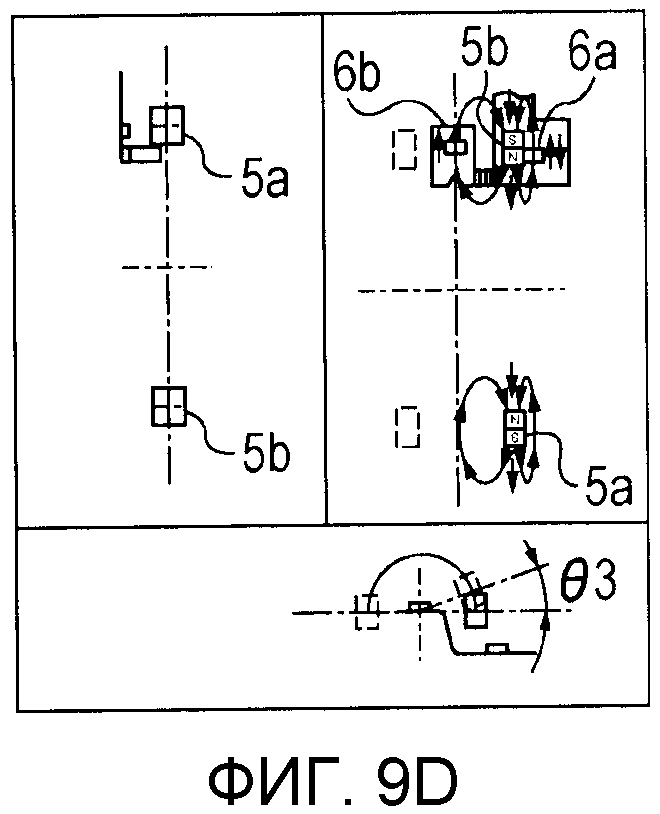
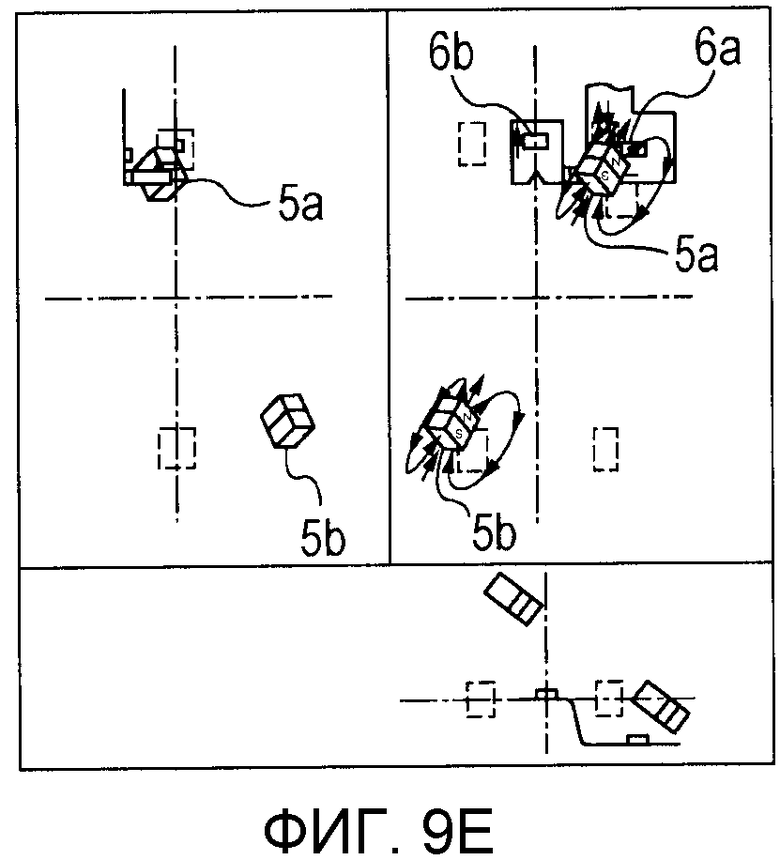
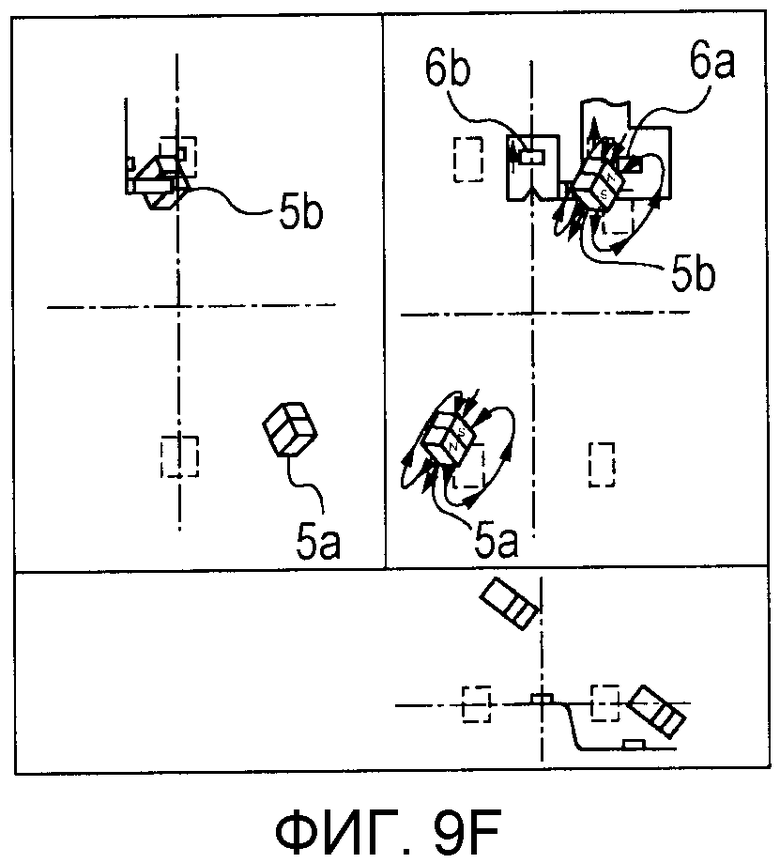
Далее, со ссылками на фиг.9A-9F, 10A, 10B и 11, будет описан переход положений магнитов 5a и 5b в результате операции поворота блока 2 отображения, а также будут описаны направления и плотности магнитных потоков магнитных полей, пронизывающих первый магнитный датчик 6a и второй магнитный датчик 6b. Каждое из трехвидовых изображений, показанных на фиг.9A-9F, включает в себя верхнее левое изображение, то есть рассматриваемое с боковой поверхности около петельной части корпуса 1 фотоаппарата, верхнее правое изображение, то есть рассматриваемое с задней поверхности корпуса 1 фотоаппарата, и нижнее изображение, то есть рассматриваемое с нижней поверхности корпуса 1 фотоаппарата.
На фиг.9A представлено трехвидовое изображение, где показаны только два магнитных датчика и два магнита в первом состоянии (угол открывания равен 0°, угол поворота равен 0°), в котором отображающая часть 2a обращена внутрь по отношению к корпусу 1 фотоаппарата, а блок 2 отображения закрыт. На фиг.9B представлено трехвидовое изображение, где показаны только два магнитных датчика и два магнита во втором состоянии (угол открывания равен 180°, угол поворота равен 0°), в котором блок 2 отображения повернут из первого состояния относительно корпуса 1 фотоаппарата на 180° вокруг первой оси C1. На фиг.9C представлено трехвидовое изображение, где показаны только два магнитных датчика и два магнита в третьем состоянии (угол открывания равен 180°, угол поворота равен +180°), в котором блок 2 отображения повернут из второго состояния относительно корпуса 1 фотоаппарата на +180° вокруг второй оси C2. На фиг.9D представлено трехвидовое изображение, где показаны только два магнитных датчика и два магнита в четвертом состоянии (угол открывания равен 0°, угол поворота равен +180°), в котором отображающая часть 2a обращена наружу относительно корпуса 1 фотоаппарата, а блок 2 отображения повернут вокруг первой оси C1. На фиг.9E представлено трехвидовое изображение, где показаны только два магнитных датчика и два магнита в пятом состоянии (угол открывания равен 60°, угол поворота равен -60°), в котором блок 2 отображения повернут относительно корпуса 1 фотоаппарата в отрицательном направлении вокруг второй оси C2 во время перехода между первым состоянием и вторым состоянием. На фиг.9F представлено трехвидовое изображение, где показаны только два магнитных датчика и два магнита в шестом состоянии (угол открывания равен 60°, угол поворота равен +120°), в котором блок 2 отображения повернут относительно корпуса 1 фотоаппарата в отрицательном направлении вокруг второй оси C2 во время перехода между третьим состоянием и четвертым состоянием.
На фиг.10A представлено изображение, где показан переход плотностей магнитных потоков, которые первый магнитный датчик 6a принимает от магнитов 5a и 5b в результате операции открывания и/или закрывания блока 2 отображения. На фиг.10B представлено изображение, где показан переход плотностей магнитных потоков, которые второй магнитный датчик 6b принимает от магнитов 5a и 5b в результате операции открывания и/или закрывания блока 2 отображения.
На фиг.11 представлено изображение, где показан переход плотностей магнитных потоков, которые второй магнитный датчик 6b принимает от магнитов 5a и 5b в результате операции поворота блока 2 отображения из второго состояния.
Сначала опишем первое состояние. В первом состоянии магнитное поле магнита 5a пронизывает первый магнитный датчик 6a от верхней стороны к нижней стороне фотоаппарата (первое направление). Как показано на фиг.10A, плотность магнитного потока составляет примерно 7 мТл, когда отображающая часть обращена внутрь, а угол открывания составляет 0°. Соответственно, первый результат обнаружения первым магнитным датчиком 6a - ВКЛ, а второй результат обнаружения этим датчиком - ВЫКЛ.
В отличие от этого, обнаружено, что плотность магнитного потока, принимаемого вторым магнитным датчиком 6b, составляет примерно -6 мТл, как видно из фиг.10B. Вместе с тем, поскольку направление магнитного поля отличается от направления, которое может быть обнаружено, результат обнаружения вторым магнитным датчиком 6b - ВЫКЛ. То есть в первом состоянии ЦП 9c определяет, что блок 2 отображения находится в закрытом состоянии, а отображающая часть 2a обращена внутрь, на основании выходных сигналов первого магнитного датчика 6a и второго магнитного датчика 6b.
Далее будет описан переход из первого состояния во второе состояние. Обращаясь к графику, показанному на фиг.10A, отмечаем, что когда отображающая часть обращена внутрь, плотность магнитного потока, пронизывающего первый магнитный датчик 6a, ниже порога при угле открывания примерно 20°. Этому углу открывания соответствует обозначение θ1 на фиг.9B. Этот угол является критическим углом. Если угол открывания больше критического угла, то и первый результат обнаружения, и второй результат обнаружения первым магнитным датчиком 6a принимают значение ВЫКЛ.
Плотность магнитного потока, пронизывающего второй магнитный датчик 6b, по существу, постоянна и составляет -6,0 мТл во время перехода из первого состояния во второе состояние, а результат обнаружения постоянно имеет значение ВЫКЛ в течение этого периода. Вот почему второй магнитный датчик 6b расположен на первой оси С1. Ошибочное обнаружение результата обнаружения поворота предотвращается за счет ограничения изменения плотности магнитного потока в результате операции поворота блока 2 отображения вокруг первой оси C1.
Далее будет описано второе состояние. Второе состояние - это состояние, в котором блок 2 отображения повернут из первого состояния на 180° вокруг первой оси C1. При этом, поскольку около первого магнитного датчика 6a нет магнита, как показано на фиг.10A, плотность магнитного потока, принимаемого первым магнитным датчиком 6a, близка к 0 мТл. То есть плотность магнитного потока ниже порога, составляющего 3 мТл. Соответственно, и первый результат обнаружения, и второй результат обнаружения первым магнитным датчиком 6a принимают значения ВЫКЛ.
В отличие от этого, обнаружено, что плотность магнитного потока, генерируемого магнитом 5a и принимаемого вторым магнитным датчиком 6b, составляет примерно -6 мТл, как следует из фиг.10B. Вместе с тем, поскольку направление магнитного поля отличается от направления, которое можно обнаружить, результат обнаружения принимает значение ВЫКЛ. То есть во втором состоянии ЦП 9c определяет, что блок 2 отображения находится в открытом состоянии, а отображающая часть 2a обращена внутрь, на основании выходных сигналов первого магнитного датчика 6a и второго магнитного датчика 6b.
Далее будет описан переход из второго состояния в третье состояние. Как показано на фиг.11, плотность магнитного потока, пронизывающего второй магнитный датчик 6b, превышает порог при угле поворота примерно +160°. Этому углу поворота соответствует обозначение θ2 на фиг.9C. Этот угол является критическим углом. Если угол поворота больше, чем критический угол, то результат обнаружения вторым магнитным датчиком 6b изменяется от ВЫКЛ к ВКЛ.
В отличие от этого, касательно магнитного поля, принимаемого первым магнитным датчиком 6a, отметим, что поскольку первый магнитный датчик 6a достаточно отстоит от магнитов 5a и 5b, первый результат обнаружения и второй результат обнаружения первым магнитным датчиком 6a имеют постоянное значение ВЫКЛ и не изменяются.
Далее будет описано третье состояние. Третье состояние - это состояние, в котором блок 2 отображения повернут из второго состояния на +180° вокруг второй ось C1. При этом, поскольку около первого магнитного датчика 6а нет магнита, плотность магнитного потока ниже порога, составляющего 3 мТл. Соответственно, и первый результат обнаружения, и второй результат обнаружения первым магнитным датчиком 6a принимают значение ВЫКЛ.
В отличие от этого, плотность магнитного потока магнитного поля, генерируемого из магнита 5b и принимаемого вторым магнитным датчиком 6b, составляет примерно 6 мТл, как показано на фиг.11. Направление магнитного поля - это направление, которое можно обнаружить. Результат обнаружения вторым магнитным датчиком 6b - ВКЛ. То есть в третьем состоянии ЦП 9c определяет, что блок 2 отображения находится в открытом состоянии, а отображающая часть 2a обращена наружу, на основании выходных сигналов первого магнитного датчика 6a и второго магнитного датчика 6b.
Далее будет описан переход из третьего состояния в четвертое состояние. Обращаясь к графику, показанному на фиг.10A, отмечаем, что когда отображающая часть обращена наружу, плотность магнитного потока, пронизывающего первый магнитный датчик 6a, проходит порог при угле открывания, составляющем примерно 20° во время перехода от угла открывания 180° к углу открывания 0°. Обозначение θ3 на фиг.9D соответствует этому углу открывания. Этот угол является критическим углом. Если угол открывания является критическим или меньшим углом, то первый результат обнаружения первым магнитным датчиком 6a принимает значение ВЫКЛ и не изменяется, а второй результат обнаружения этим датчиком изменяется с ВЫКЛ до ВКЛ.
В отличие от этого, плотность магнитного потока, пронизывающего второй магнитный датчик 6b, почти постоянно составляет 6,0 мТл во время перехода из третьего состояния в четвертое состояние, а результат обнаружения постоянно принимает значение ВКЛ в течение этого периода. Вот почему второй магнитный датчик 6b расположен на первой оси C1. Ошибочное обнаружение при обнаружении поворота предотвращается путем ограничения изменения плотности магнитного потока в результате операции обнаружения поворота блока 2 отображения вокруг первой оси C1. Если второй магнитный датчик 6b расположен в положении, отстоящем от первой оси C1, плотность магнитного потока, принимаемого вторым магнитным датчиком 6b, изменяется. Если изменение плотности магнитного потока в результате операции открывания и/или закрывания блока 2 отображения является изменением, которое не вызывает превышение порога плотностью магнитного потока, то это изменение не создает затруднений. Однако если изменение вызывает прохождение порога плотностью магнитного потока, это изменение может приводить к ошибочному обнаружению. Благодаря этому, второй магнитный датчик 6b можно расположить в положении, отстоящем от первой оси C1, но находящейся около первой оси C1 в той мере, в какой изменение плотности магнитного потока в результате операции открывания и/или закрывания не вызывает превышение порога плотностью магнитного потока.
Далее будет описано четвертое состояние. Четвертое состояние - это состояние, в котором блок 2 отображения повернут из третьего состояния вокруг первой оси C1 таким образом, что угол открывания становится равным 0°. При этом, магнитное поле магнита 5b пронизывает первый магнитный датчик 6a от нижней стороны к верхней стороне фотоаппарата (второе направление). Как показано на фиг.10A, плотность магнитного потока, принимаемого первым магнитным датчиком 6a, составляет примерно -7 мТл, когда отображающая часть обращена наружу, а угол открывания составляет 0°. Соответственно, первый результат обнаружения первым магнитным датчиком 6a принимает значение ВЫКЛ, а второй результат обнаружения этим датчиком принимает значение ВКЛ.
В отличие от этого, плотность магнитного потока, принимаемого вторым магнитным датчиком 6b, составляет примерно 6 мТл, как показано на фиг.11. Поскольку направление магнитного поля - это направление, которое можно обнаружить и при котором результат обнаружения принимает значение ВКЛ. То есть в четвертом состоянии ЦП 9c определяет, что блок 2 отображения находится в закрытом состоянии, а отображающая часть 2a обращено наружу, на основании выходных сигналов первого магнитного датчика 6a и второго магнитного датчика 6b.
Далее будет описано пятое состояние. Пятое состояние - это состояние, в котором блок 2 отображения повернут из первого состояния примерно на 60° вокруг первой оси C1 и повернут примерно на -60° вокруг второй оси C2. В этом состоянии магнит 5a приближается к первому магнитному датчику 6a, хотя блок 2 отображения открыт относительно корпуса 1 фотоаппарата. Кроме того, поскольку относительная позиционная взаимосвязь между первым магнитным датчиком 6a и магнитом 5a сдвинута по сравнению с той, которая была в первом состоянии, первый магнитный датчик 6a обнаруживает магнитное поле в направлении, противоположном направлению в первом состоянии. Соответственно, плотность магнитного потока, пронизывающего первый магнитный датчик 6a, превышает -3 мТл, поскольку первый результат обнаружения первым магнитным датчиком 6a принимает значение ВЫКЛ, а второй результат обнаружения этим датчиком принимает значение ВКЛ.
В отличие от этого, обнаружено, что плотность магнитного потока, генерируемого магнитом 5a и принимаемого вторым магнитным датчиком 6b, составляет примерно -6 мТл, что следует из фиг.10B. Вместе с тем, поскольку направление магнитного поля отличается от направления, которое можно обнаружить, результатом обнаружения является ВЫКЛ.
Далее будет описано шестое состояние. Шестое состояние - это состояние, в котором блок 2 отображения повернут из четвертого состояния примерно на 60° вокруг первой оси C1 и повернут примерно на -60° вокруг второй оси C2. В этом состоянии, магнит 5b приближается к первому магнитному датчику 6a, хотя блок 2 отображения открыт относительно корпуса 1 фотоаппарата. Кроме того, поскольку относительная позиционная взаимосвязь между первым магнитным датчиком 6a и магнитом 5b сдвинута по сравнению с той, которая была в четвертом состоянии, первый магнитный датчик 6a обнаруживает магнитное поле в направлении, противоположном направлению в четвертом состоянии. Соответственно, плотность магнитного потока, пронизывающего первый магнитный датчик 6a, превышает 3 мТл, поэтому первый результат обнаружения первым магнитным датчиком 6a принимает значение ВКЛ, а второй результат обнаружения этим датчиком принимает значение ВЫКЛ. В отличие от этого, плотность магнитного потока, принимаемого вторым магнитным датчиком 6b, составляет примерно 6 мТл, как показано на фиг.11. Поскольку направление магнитного поля - это направление, которое может быть обнаружено, результат обнаружения принимает значение ВКЛ.
Далее, со ссылками на фиг.12, будут подробно описаны состояния движения блока 2 отображения, результаты обнаружения магнитными датчиками и формы отображения для отображающей части.
В первом состоянии (см. фиг.3А и 9A) первый результат обнаружения первым магнитным датчиком 6a принимает значение ВКЛ, второй результат обнаружения этим датчиком принимает значение ВЫКЛ, а результат обнаружения вторым магнитным датчиком 6b принимает значение ВЫКЛ. Когда результаты обнаружения получены, блок 2 отображения оказывается закрытым, а отображающая часть 2a обращена внутрь. Фотограф не может визуально контролировать отображающую часть 2a. ЦП 9c осуществляет управление отображением таким образом, что подсветка отображающей части 2a отключается, а отображающая часть 2a ничего не отображает (первая форма отображения).
Во втором состоянии (см. фиг.3C и 9B) оба - первый и второй - результаты обнаружения первым магнитным датчиком 6a принимают значение ВЫКЛ, а результат обнаружения вторым магнитным датчиком 6b принимает значение ВЫКЛ. Когда получаются такие результаты обнаружения, ЦП 9c осуществляет управление отображением для отображающей части 2a таким образом, что изображение, основанное на изображении объекта, сформированном на снимающем изображение элементе, таком как датчик на основе ПЗС, отображается посредством фотографической оптической системы (не показана) в нормальном состоянии (вторая форма отображения). Таким образом, как показано на фиг.3C, в состоянии, в котором блок 2 отображения открыт (угол открывания составляет примерно 180°), фотограф легко может контролировать композицию, рассматривая изображение, отображенное на отображающей части 2a.
В третьем состоянии (см. фиг.4C и 9C) оба - первый и второй - результаты обнаружения первым магнитным датчиком 6a принимают значение ВЫКЛ, а результат обнаружения вторым магнитным датчиком 6b принимает значение ВКЛ. Когда получаются такие результаты обнаружения, ЦП 9c осуществляет управление отображением для отображающей части 2a таким образом, что изображение отображается в вертикально инвертированной форме (третья форма отображения) по отношению к нормальному состоянию. В этом состоянии отображающая часть 2a обращена к передней поверхности корпуса 1 фотоаппарата. Это состояние является подходящим, когда фотограф делает фотографию самого себя.
В четвертом состоянии (см. фиг.4E и 9D) первый результат обнаружения первым магнитным датчиком 6a принимает значение ВЫКЛ, второй результат обнаружения этим датчиком принимает значение ВКЛ, а результат обнаружения вторым магнитным датчиком 6b принимает значение ВКЛ. Когда получены такие результаты обнаружения, ЦП 9c осуществляет управление отображением для отображающей части 2a таким образом, что изображение отображается в вертикально и горизонтально инвертированной форме (четвертая форма изображения) по отношению к нормальному состоянию. В этом состоянии отображающая часть 2a обращена к задней поверхности корпуса 1 фотоаппарата, а оптическая ось фотографической оптической системы, по существу, выровнена с центральным участком отображающей части 2a. Фотограф легко сможет отследить движущийся объект.
В пятом состоянии (см. фиг.5A и 9E) первый результат обнаружения первым магнитным датчиком 6a принимает значение ВЫКЛ, второй результат обнаружения этим датчиком принимает значение ВКЛ, а результат обнаружения вторым магнитным датчиком 6b принимает значение ВЫКЛ. Когда получены такие результаты обнаружения, ЦП 9c определяет, что состояние имеет место во время перехода между первым состоянием и вторым состоянием, и осуществляет управление отображением для отображающей части 2a таким образом, что отображается изображение в нормальном состоянии.
В шестом состоянии (см. фиг.5В и 9F) первый результат обнаружения первым магнитным датчиком 6a принимает значение ВКЛ, второй результат обнаружения этим датчиком принимает значение ВЫКЛ, а результат обнаружения вторым магнитным датчиком 6b принимает значение ВКЛ. Когда получены такие результаты обнаружения, ЦП 9c определяет, что состояние имеет место во время перехода между третьим состоянием и четвертым состоянием, и осуществляет управление отображением для отображающей части 2a таким образом, что изображение отображается в вертикально и горизонтально инвертированной форме по отношению к нормальному состоянию.
Как описано выше, происходит выдача сигнала, отличающегося в соответствии с направлением магнитного поля, обнаруживаемого первым магнитным датчиком, то есть используемого для обнаружения открывания и/или закрывания блока 2 отображения, а состояние движения блока 2 отображения определяется на основании комбинации выходного сигнала из первого магнитного датчика с выходным сигналом из второго магнитного датчика, то есть используемой для обнаружения поворота блока 2 отображения. Если выдается заранее определенная комбинация, а блок 2 отображения открывается или закрывается и поворачивается относительно корпуса 1 фотоаппарата, управление осуществляется аналогично управлению на основании выходных сигналов, которые получаются непосредственно перед тем, как получаются выходные сигналы упомянутой заранее определенной комбинации.
Иными словами, в состоянии, в котором первый магнитный датчик не обнаруживает магнитное поле ни в одном направлении из первого и второго направлений, если первый магнитный датчик обнаруживает магнитное поле в одном направлении, то осуществляется управление, которое отличается от управления в состоянии, в котором магнитное поле не обнаруживается ни в одном направлении. Если обнаруживается магнитное поле в другом направлении, то осуществляется управление, которое аналогично управлению в состоянии, в котором магнитное поле не обнаруживается ни в одном из первого и второго направлений. Кроме того, в соответствии с выходным сигналом второго магнитного датчика, управление переключается между управлением, которое осуществляется, если первый магнитный датчик обнаруживает магнитное поле в первом направлении, и управлением, которое осуществляется, если первый магнитный датчик обнаруживает магнитное поле во втором направлении.
Таким образом, можно предотвратить осуществление ошибочного управления отображением, которое не соответствует состоянию движения блока 2 отображения во время перехода состояния блока 2 отображения. Когда получаются выходные сигналы заранее определенной комбинации, эти выходные сигналы можно игнорировать и непрерывно использовать форму отображения, основанную на ранее полученных выходных сигналах.
В этом варианте осуществления в качестве магнитного датчика используется датчик с ГМС, который обнаруживает магнитное поле, параллельное главной плоскости (см. фиг.6A-6D). Однако тип магнитного датчика этим не ограничивается. Например, даже если используется датчик Холла, который обнаруживает магнитное поле, перпендикулярное главной плоскости, в той мере, в какой направление, которое можно обнаружить, проходит параллельно первой оси С1, можно получить результат обнаружения, аналогичный результату обнаружения посредством датчика с ГМС.
Кроме того, в этом варианте осуществления порог обнаружения для первого магнитного датчика составляет 3 мТл, а порог обнаружения для второго магнитного датчика составляет 2 мТл. Однако значения порогов обнаружения этим не ограничиваются. Значение порога обнаружения можно определять в соответствии с углом открывания и углом поворота, при которых форма отображения изменяется.
Помимо этого, магниты 5a и 5b имеют северные полюсы на верхней стороне и южные полюсы на нижней стороне корпуса в первом состоянии. Однако это не является ограничением. Если магнитные полюсы магнитов перевернуть, то направления обнаружения для магнитных датчиков могут измениться соответствующим образом.
Магниты 5a и 5b имеют одинаковую плотность магнитного потока и одинаковую форму. Однако это не является ограничением. В той мере, в какой плотности магнитного потока не превышают пороги, показанные на фиг.10A, 10B и 11, можно использовать магниты с другими плотностями магнитного потока и другими формами.
Кроме того, в этом варианте осуществления в качестве примера электронного устройства, к которому применяется данное изобретение, описан цифровой фотоаппарат. Вместе с тем, в той мере, в какой электронное устройство имеет такую конфигурацию, что подвижный блок соединен с корпусом с возможностью поворота относительно этого корпуса вокруг первой оси и второй оси, данное изобретение применимо к электронному устройству, не являющемуся цифровым фотоаппаратом, такому как мобильный телефон.
Кроме того, этот вариант осуществления используется для осуществления управления отображением для отображающей части 2a в соответствии с состоянием движения блока 2 отображения относительно корпуса 1 фотоаппарата. Однако этот вариант осуществления можно использовать для иного управления, которое осуществляется посредством ЦП 9c на основании результатов обнаружения обоими магнитными датчиками. Например, при конфигурации, в которой блок управления предусмотрен в блоке 2 отображения, этот вариант осуществления можно использовать для переключения состояния рабочего блока между активированным состоянием и деактивированным состоянием на основании результатов обнаружения обоими магнитными датчиками, или для изменения эффекта, получаемого за счет работы блока управления, на основании результатов обнаружения обоими магнитными датчиками. В альтернативном варианте при конфигурации, имеющей функцию различения фотографической сцены с помощью фотоаппарата и автоматического задания условия фотографирования, подходящего для этой фотографической сцены, этот вариант осуществления можно использовать для задания условия фотографирования на основании результатов обнаружения обоими магнитными датчиками.
Хотя данное изобретение описано со ссылками на возможные варианты осуществления, следует понять, что это изобретение не ограничивается описанными возможными вариантами осуществления. Объем притязаний нижеследующей формулы изобретения следует интерпретировать в самом широком смысле как охватывающий все такие модификации и эквивалентные конструкции и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ВЗАИМОДЕЙСТВИЯ С ПОЛЬЗОВАТЕЛЕМ | 2006 |
|
RU2450319C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ | 2013 |
|
RU2643352C2 |
| УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ МНОЖЕСТВО СЕНСОРНЫХ ЭКРАНОВ, И СПОСОБ ПЕРЕКЛЮЧЕНИЯ ЭКРАНОВ ДЛЯ УСТРОЙСТВА | 2012 |
|
RU2611023C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГИБКИМ УСТРОЙСТВОМ | 2013 |
|
RU2645665C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПОЛЬЗОВАТЕЛЬСКИМ ИНТЕРФЕЙСОМ НА ОСНОВЕ ДВИЖЕНИЙ | 2011 |
|
RU2541852C2 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2525034C2 |
| СПОСОБ УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ | 2017 |
|
RU2733025C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2012 |
|
RU2542889C2 |
| КОНСТРУКЦИЯ ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2727701C2 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2585235C2 |

Изобретение относится к электронному устройству такому, как цифровой фотоаппарат или видеокамера, в котором с корпусом соединен с возможностью поворота подвижный блок. Техническим результатом является обеспечение возможности осуществлять управление в соответствии с состоянием или ориентацией подвижного блока относительно корпуса. Результат достигается тем, что первый и второй магниты предусмотрены в подвижном блоке, который соединен с корпусом, при этом подвижный блок выполнен с возможностью поворота относительно корпуса вокруг первой оси и второй оси, которая, по существу, перпендикулярно первой оси. В корпусе предусмотрены первый и второй датчики магнитного поля. На основании выходных сигналов первого и второго датчиков магнитного ноля, управление осуществляется в соответствии с состоянием подвижного блока по отношению к корпусу. 11 з.п. ф-лы, 12 ил.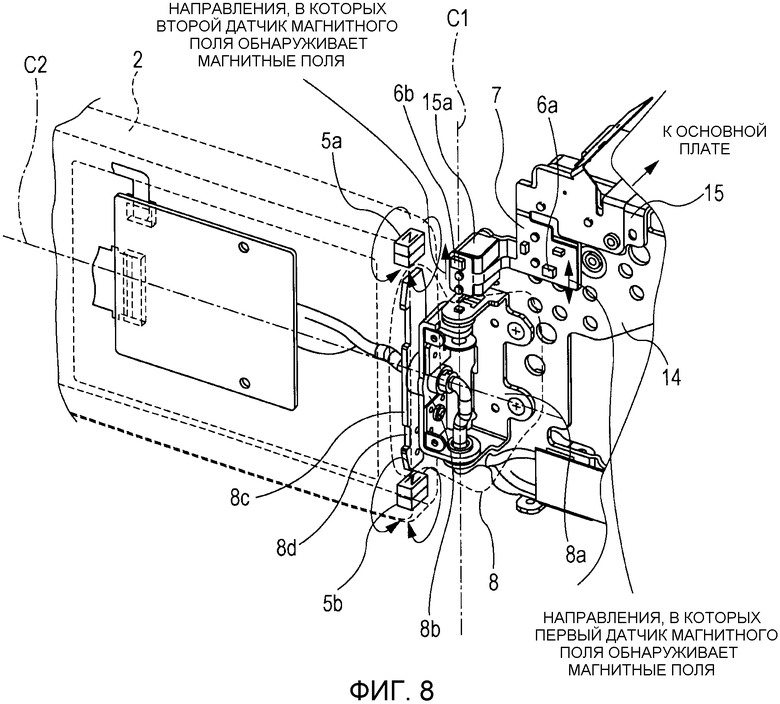
1. Электронное устройство, содержащее
корпус, и
подвижный блок, соединенный с корпусом, причем подвижный блок выполнен с возможностью поворота относительно корпуса вокруг первой оси и второй оси, которая перпендикулярна первой оси,
при этом подвижный блок включает в себя
первую часть, генерирующую магнитное поле, расположенную около первой оси, и
вторую часть, генерирующую магнитное поле, расположенную в положении, в котором вторая часть, генерирующая магнитное поле, по существу, симметрична первой части, генерирующей магнитное поле, относительно второй оси,
и при этом корпус включает в себя
первый датчик обнаружения магнитного поля, расположенный около положения, в котором первый датчик обнаружения магнитного поля обращен к одной из первой и второй частей, генерирующих магнитное поле, в состоянии, в котором подвижный блок поворачивается вокруг первой оси и приближается к корпусу,
второй датчик обнаружения магнитного поля, расположенный около первой оси, и
блок управления, конфигурированный для осуществления управления в соответствии с состоянием подвижного блока относительно корпуса на основании выходных сигналов первого и второго датчиков обнаружения магнитного поля.
2. Электронное устройство по п.1, в котором второй датчик обнаружения магнитного поля расположен около первого датчика обнаружения магнитного поля.
3. Электронное устройство по п.1, в котором второй датчик обнаружения магнитного поля расположен на первой оси.
4. Электронное устройство по п.1, в котором первый датчик обнаружения магнитного поля выполнен с возможностью обнаружения магнитных полей в разных направлениях, и при этом второй датчик обнаружения магнитного поля выполнен с возможностью обнаружения только одного магнитного поля в одном направлении.
5. Электронное устройство по п.1, в котором подвижный блок дополнительно включает в себя блок отображения, конфигурированный для отображения изображения, при этом блок управления изменяет форму отображения для блока отображения в соответствии с состоянием поворота подвижного блока вокруг первой оси и состоянием поворота подвижного блока вокруг второй оси относительно корпуса.
6. Электронное устройство по п.1, в котором подвижный блок соединен с корпусом посредством петельного блока.
7. Электронное устройство по п.6, в котором соединительная шина, проходящая через петельный блок и электрически соединяющая корпус с подвижным блоком, входит в петельный блок в положении, находящемся на первой оси корпуса, со стороны, где нет второго датчика обнаружения магнитного поля.
8. Электронное устройство по п.1, в котором первый датчик обнаружения магнитного поля выполнен с возможностью обнаружения магнитных полей в разных направлениях и выдачи разных сигналов в соответствии с направлениями обнаруживаемых магнитных полей.
9. Электронное устройство по п.8, в котором, если комбинация выходного сигнала первого датчика обнаружения магнитного поля и выходного сигнала второго датчика обнаружения магнитного поля является заранее определенной комбинацией, то блок управления осуществляет управление, которое аналогично управлению, основанному на выходных сигналах, которые получаются непосредственно перед тем, как получаются выходные сигналы упомянутой заранее определенной комбинации.
10. Электронное устройство по п.8, в котором, если комбинация выходного сигнала первого датчика обнаружения магнитного поля и выходного сигнала второго датчика обнаружения магнитного поля является заранее определенной комбинацией, то блок управления игнорирует выходные сигналы упомянутой заранее определенной комбинации и непрерывно осуществляет управление на основании выходных сигналах, которые получаются непосредственно перед тем, как получаются выходные сигналы упомянутой заранее определенной комбинации.
11. Электронное устройство по п.8, в котором, если состояние, в котором первый датчик обнаружения магнитного потока не обнаруживает магнитное поле ни в одном направлении, становится состоянием, в котором первый датчик обнаружения магнитного потока обнаруживает магнитное поле в первом направлении, то блок управления осуществляет управление, которое отличается от управления в состоянии, в котором первый датчик обнаружения магнитного потока не обнаруживает магнитное поле ни в одном направлении, а если состояние, в котором первый датчик обнаружения магнитного потока не обнаруживает магнитное поле ни в одном направлении, становится состоянием, в котором первый датчик обнаружения магнитного потока обнаруживает магнитное поле во втором направлении, то блок управления осуществляет управление, аналогичное управлению в состоянии, в котором первый датчик обнаружения магнитного потока не обнаруживает магнитное поле ни в одном направлении.
12. Электронное устройство по п.8, в котором блок управления переключает управление между управлением, которое осуществляется, если первый датчик обнаружения магнитного поля обнаруживает магнитное поле в первом направлении, и управлением, которое осуществляется, если первый датчик обнаружения магнитного поля обнаруживает магнитное поле во втором направлении, в соответствии с выходным сигналом второго датчика обнаружения магнитного поля.
| US 2006093340 A1, 04.05.2006 | |||
| JP 2003259170 A, 12.09.2003 | |||
| US 2007276513 A1, 29.11.2007 | |||
| RU 2004135797 A, 20.05.2006. |

