Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к способу управления отображением и устройству управления отображением.
УРОВЕНЬ ТЕХНИКИ
[0002]
Существует общеизвестная методика информирования других транспортных средств, окружающих транспортное средство-носитель, при автоматическом управлении о том, что транспортное средство-носитель собирается сменить полосу движения (патентная литература 1). Изобретение, раскрытое в патентной литературе 1, выполнено таким образом, что после того, как пользователь транспортного средства-носителя манипулирует переключателем указателей поворота для смены полосы движения, если в окружении транспортного средства-носителя обнаружено транспортное средство, которое препятствует смене полосы движения, сигнал указателя поворота не включается, пока обнаруженное транспортное средство не удалится так далеко от транспортного средства-носителя, что транспортное средство-носитель сможет безопасно сменить полосу движения.
СПИСОК ЦИТИРОВАННЫХ ИСТОЧНИКОВ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентная литература 1: Публикация заявки на патент Японии № 2017–30436
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Однако в изобретении, раскрытом в патентной литературе 1, сигнал поворота иногда не включается во время автоматического управления независимо от намерения пользователя выполнить левый или правый поворот, а также сменить полосу движения. Это может вызвать чувство дискомфорта у пользователя, когда пользователь едет в транспортном средстве.
[0005]
Настоящее изобретение было выполнено с учетом вышеуказанной проблемы. Задача настоящего изобретения состоит в создании способа управления отображением и устройства управления отображением, которые способны снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет в транспортном средстве.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Способ управления отображением в соответствии с аспектом настоящего изобретения устанавливает момент времени начала включения сигнала поворота и момент времени начала включения индикатора указателей поворота отличными друг от друга.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Настоящее изобретение позволяет снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет в транспортном средстве.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[Фиг. 1] Фиг. 1 – схема конфигурации устройства управления отображением в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. 2A] Фиг. 2A – схема для пояснения примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 2B] Фиг. 2B – схема для пояснения примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 3A] Фиг. 3A – схема для пояснения примера того, как устройство управления отображением работает для выполнения поворота влево посредством автоматического управления.
[Фиг. 3B] Фиг. 3B - схема для пояснения примера того, как устройство управления отображения работает для выполнения поворота влево посредством автоматического управления.
[Фиг. 4A] Фиг. 4A – схема для пояснения другого примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 4B] Фиг. 4B – схема для пояснения примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 5A] Фиг. 5A – схема для пояснения примера того, как устройство 100 управления отображением работает для выполнения замедления посредством автоматического управления.
[Фиг. 5B] Фиг. 5B – схема для пояснения примера того, как устройство 100 управления отображением работает для выполнения замедления посредством автоматического управления.
[Фиг. 6A] Фиг. 6A – схема для пояснения еще одного примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 6B] Фиг. 6B – схема для пояснения примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 7A] Фиг. 7A – схема для пояснения еще одного примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 7B] Фиг. 7B – схема для пояснения примера того, как устройство управления отображением работает для выполнения смены полосы движения посредством автоматического управления.
[Фиг. 8A] Фиг. 8A – блок–схема для пояснения примера того, как работает устройство управления отображением согласно варианту осуществления настоящего изобретения.
[Фиг. 8B] Фиг. 8B – блок–схема для пояснения примера того, как работает устройство управления отображением согласно варианту осуществления настоящего изобретения.
Осуществление изобретения
[0009]
Ниже будет приведено описание для варианта осуществления настоящего изобретения с обращением к чертежам. На всех иллюстрациях на чертежах одинаковые компоненты будут обозначены одинаковыми условными обозначениями, и описание таких компонентов не будет приведено.
(Конфигурация устройства управления отображением)
[0010]
Как показано на фиг.1, транспортное средство в соответствии с вариантом осуществления включает в себя устройство 100 управления отображением, устройство 200 управления транспортным средством, детектор 1 объектов, детектор 2 положения транспортного средства–носителя, блок 3 получения карты, группу 4 датчиков и переключатель 5 указателей поворота. Устройство 100 управления отображением включает в себя контроллер 20, индикатор 6, дисплей 7, сигнал 8 поворота, стоп–сигнал 9 и фару 10. Устройство 200 управления транспортным средством включает в себя детектор 30 состояния транспортного средства-носителя, ЭБУ 31 управления транспортным средством (блок управления транспортным средством) и исполнительный механизм 32. Устройство 100 управления отображением согласно варианту осуществления применяется в транспортном средстве, способном переключаться между автоматическим и ручным управлением. Следует отметить, что устройство 100 управления отображением может включать в себя детектор 1 объектов, детектор 2 положения транспортного средства–носителя, блок 3 получения карты, группу 4 датчиков и переключатель 5 указателей поворота. В нижеследующем описании под пользователем понимается лицо, находящееся в транспортном средстве-носителе, если не указано иное.
[0011]
Детектор 1 объектов включает в себя множество различных типов датчиков обнаружения объектов, установленных в транспортном средстве-носителе. Множество различных типов датчиков обнаружения объектов включают в себя лазерный радар, радар миллиметрового диапазона, камеру, лазерный дальномер, связь между транспортными средствами, связь между дорожной инфраструктурой и транспортными средствами и тому подобное. Детектор 1 объектов обнаруживает объекты вокруг транспортного средства с использованием множества датчиков обнаружения объектов. Более конкретно, детектор 1 объектов обнаруживает: движущиеся объекты, включая другие транспортные средства, мотоциклы, велосипеды и пешеходов; и неподвижные объекты, в том числе припаркованные транспортные средства. Например, детектор 1 объектов обнаруживает положение, ориентацию (угол рыскания), размер, скорость, ускорение, замедление и скорость рыскания каждого из движущихся и неподвижных объектов относительно транспортного средства-носителя. Детектор 1 объектов выводит обнаруженную информацию на контроллер 20 и детектор 30 состояния транспортного средства-носителя.
[0012]
Детектор 2 положения транспортного средства–носителя включает в себя датчики обнаружения положения, такие как Глобальная система определения местоположения (GPS) и одометрии, которые установлены в транспортном средстве-носителе и измеряют абсолютное положение транспортного средства-носителя. Детектор 2 положения транспортного средства-носителя обнаруживает абсолютное положение транспортного средства-носителя, то есть положение и ориентацию транспортного средства-носителя относительно заданной контрольной точки, используя датчики обнаружения положения. Детектор 2 положения транспортного средства-носителя выводит обнаруженную информацию в контроллер 20 и детектор 30 состояния транспортного средства-носителя.
[0013]
Устройство 3 получения карты получает картографическую информацию, представляющую структуру дороги, по которой движется транспортное средство-носитель. Картографическая информация, полученная блоком 3 получения карты, включает в себя информацию о структуре дороги, представляющую абсолютные положения полос движения, отношения между соединяющимися полосами движения и относительное взаимное расположение полос движения. Блок 3 получения карты может иметь картографическую базу данных, которая хранит картографическую информацию, или может получать картографическую информацию с внешнего сервера картографических данных посредством облачных вычислений. Иначе блок 3 получения карты может получать картографическую информацию, используя связь между транспортными средствами и связь между дорожной инфраструктурой и транспортными средствами. Блок 3 получения карты выводит обнаруженную информацию на контроллер 20 и детектор 30 состояния транспортного средства-носителя.
[0014]
Группа 4 датчиков включает в себя множество датчиков для обнаружения состояния транспортного средства-носителя. Группа 4 датчиков включает в себя, например, датчик скорости транспортного средства, датчик переключения передач и датчик рулевого управления. Группа 4 датчиков обнаруживает скорость транспортного средства, положение переключения, положение рулевого управления и так далее и выводит их на контроллер 20 и детектор 30 состояния транспортного средства-носителя.
[0015]
Переключатель 5 указателей поворота установлен рядом с сиденьем водителя и обнаруживает направление поворота транспортного средства-носителя, когда транспортное средство-носитель совершает поворот влево или вправо или меняет полосу движения. Переключатель 5 указателей поворота выводит обнаруженное направление поворота на контроллер 20 и детектор 30 состояния транспортного средства-носителя.
[0016]
Контроллер 20 получает информацию от детектора 1 объектов, детектора 2 положения транспортного средства–носителя, блока 3 получения карты, группы 4 датчиков и переключателя 5 указателей поворота. Используя полученную информацию, контроллер 20 формирует изображение окружения, представляющее состояние окружения транспортного средства-носителя, и управляет отображениями, соответственно, на индикаторе 6 и дисплее 7.
[0017]
Контроллер 20 является микрокомпьютером общего назначения, включающим в себя центральный процессор (ЦП), память и модуль ввода/вывода. Компьютерные программы для обеспечения функционирования микрокомпьютера в качестве устройства 100 управления отображением установлены в микрокомпьютере. Микрокомпьютер функционирует как множество схем обработки информации, включенных в устройство 100 управления отображением, посредством выполнения компьютерных программ. Этот вариант осуществления показывает пример, в котором программное обеспечение реализует множество схем обработки информации, включенных в устройство 100 управления отображением. Однако само собой разумеется, что схемы обработки информации могут быть сформированы для специализированного аппаратного обеспечения, подготовленного для выполнения следующей обработки информации. Кроме того, множество схем обработки информации могут быть сформированы из их соответствующих частей аппаратного обеспечения.
[0018]
Контроллер 20 включает в себя генератор 21 изображения окружения, детектор 22 состояния окружения и контроллер 23 дисплея в качестве упомянутого множества схем обработки информации.
[0019]
На основании изображения окружения транспортного средства-носителя генератор 21 изображения окружения устанавливает заданную виртуальную точку обзора и плоскость проецирования и формирует изображение окружения в форме вида вниз сверху транспортного средства-носителя (в направлении транспортного средства). Следует отметить, что изображение окружения может быть изображением вида сверху вниз, изображением с высоты птичьего полета или тому подобным. Не имеет значения, какая форма изображения используется для изображения окружения, при условии, что форма изображения помогает распознавать транспортное средство-носитель и состояние окружения транспортного средства-носителя. Кроме того, методика формирования изображения вида сверху вниз и изображения с высоты птичьего полета является традиционной, и подробное описание этой методики не будет приведено.
[0020]
Детектор 22 состояния окружения обнаруживает состояние окружения транспортного средства-носителя. Состояние окружения транспортного средства-носителя означает, что вокруг транспортного средства-носителя присутствуют другие транспортные средства, мотоциклы, велосипеды, пешеходы и тому подобное. Кроме того, состояние окружения транспортного средства-носителя включает в себя положения и скорости других транспортных средств и тому подобного относительно транспортного средства-носителя.
[0021]
Контроллер 23 дисплея управляет различными дисплеями в зависимости от состояния окружения транспортного средства-носителя, обнаруживаемого детектором 22 состояния окружения. Контроллер 23 дисплея управляет, главным образом, отображением на сигнале 8 поворота и индикатором указателей поворотов. Подробное описание будет приведено ниже.
[0022]
Индикатор 6 представляет собой устройство, установленное на приборной панели рядом с сиденьем водителя, для отображения пользователю различных элементов информации. Индикатор 6 включает в себя спидометр, тахометр и индикатор указателей поворотов. Следует отметить, что индикатор 6 может быть образован жидкокристаллическим дисплеем, который отличен от описанного ниже дисплея 7. Кроме того, в варианте осуществления индикатор указателей поворотов отображает состояние освещения сигналов 8 поворота.
[0023]
Дисплей 7 представляет собой устройство для отображения пользователю различных элементов информации и представляет собой, например, навигационный дисплей, установленный в салоне транспортного средства. Дисплей 7 отображает, например, изображение окружения, представляющее состояние окружения транспортного средства-носителя. Дисплей 7 дополнительно отображает состояние управления транспортным средством, выполняемого ЭБУ 31 управления транспортным средством. Управление транспортным средством включает в себя автоматическое управление и управление помощью при вождении, которые включают в себя, например, автоматическую смену полосы движения и автоматический обгон. Состояние управления транспортным средством включает в себя состояние, при котором управление транспортным средством не выполняется, состояние подготовки к выполнению управления транспортным средством и состояние, в котором выполняется управление транспортным средством. Во время выполнения управления транспортным средством дисплей 7 показывает, например, дисплей для отображения того, что транспортное средство-носитель меняет полосу движения, дисплей для отображения того, что транспортное средство-носитель обгоняет транспортное средство впереди, дисплей для отображения маршрута для изменения полосы движения и дисплей для отображения порядка, в котором движутся транспортное средство-носитель, движущееся впереди транспортное средство, другие транспортные средства вокруг транспортного средства-носителя, чтобы позволить пользователю знать содержание управления транспортным средством. Состояние подготовки – это состояние, которое предшествует управлению движением и которое показывает, что управление движением будет выполняться. Пока идет подготовка к управлению движением, отображение состояния подготовки показывает, например, содержание управления движением, которое будет выполняться с этого момента. Другими словами, отображение состояния подготовки является отображением, предназначенным для того, чтобы информировать пользователя о том, что управление движением еще не выполнено и будет выполняться с этого момента.
[0024]
Сигнал 8 поворота является осветительным устройством для информирования внешнего окружения транспортного средства-носителя о направлении рулевого управления транспортного средства-носителя. Сигнал 8 поворота выдаётся, например, в передней левой, передней правой, задней левой и задней правой части транспортного средства-носителя. Кроме того, сигнал 8 поворота мигает в ответ на манипуляцию переключателем 5 указателей поворота со стороны пользователя. Кроме того, сигнал 8 поворота мигает в ответ на управление контроллером 20.
[0025]
Cтоп–сигнал 9 представляет собой осветительное устройство, информирующее внешнее окружение транспортного средства-носителя о замедлении транспортного средства-носителя. Стоп-сигнал 9 предусмотрен, например, с задней левой и правой стороны транспортного средства-носителя. Кроме того, стоп–сигнал 9 включается для непрерывного освещения при торможении со стороны пользователя и управлении со стороны контроллера 20. Фара 10 представляет собой осветительное устройство для улучшения видимости для пользователя. Фара 10 предусмотрена, например, в передней левой и передней правой части транспортного средства-носителя. Фара 10 включается для непрерывного освещения посредством манипуляций со стороны пользователя.
[0026]
Следует отметить, что в варианте осуществления включение для непрерывного освещения означает, что свет постоянно включен. Кроме того, мигание означает, что свет повторно включается и выключается в определенных циклах.
[0027]
Детектор 30 состояния транспортного средства-носителя определяет положение, угол рулевого управления, скорость и тому подобное для транспортного средства-носителя и выводит их в ЭБУ 31 управления транспортным средством.
[0028]
На основании данных, обнаруженных детектором 30 состояния транспортного средства-носителя и детектором 22 состояния окружения, ЭБУ 31 управления транспортным средством вычисляет маршрут движения, отражающий состояние окружения, и выполняет управление транспортным средством на основании маршрута движения. ЭБУ 31 управления транспортным средством выполняет автоматическое управление приводом от исполнительного механизма 32 для управления, торможения и рулевого управления транспортным средством-носителем. Следует отметить, что в варианте осуществления автоматизированное вождение выполняется посредством управления по меньшей мере одним из исполнительных механизмов, таких как исполнительный механизм тормоза исполнительный механизм акселератора и исполнительный механизм рулевого управления, без манипуляций со стороны пользователя. Поэтому не имеет значения, что другие исполнительные механизмы приводятся в действие в ответ на манипуляции со стороны пользователя. Кроме того, автоматическое управление может выполняться посредством выполнения по меньшей мере одного из управления ускорением/замедлением, управления горизонтальным положением и тому подобного. Кроме того, в варианте осуществления выполняется ручное управление посредством манипуляций со стороны пользователя, например, тормозом, акселератором и рулевым управлением. Следует отметить, что устройство 100 управления отображением в соответствии с вариантом осуществления применимо как к автоматическому управлению, так и к ручному управлению. Следует отметить, что в нижеследующем описании конфигурация, относящаяся к автоматическому управлению, иногда будет называться «системой».
[0029]
(Пример работы устройства управления отображением)
Обращаясь к фиг. 2A и 2B, будет приведено описание для примера того, как работает устройство 100 управления отображением, когда смена полосы движения выполняется посредством автоматического управления. Смена полосы движения, выполняемая посредством автоматического управления, включает в себя смену полосы движения на основании команды пользователя и смену полосы движения на основании подтверждения со стороны пользователя, которое запрашивается системой. Для начала будет приведено описание для смены полосы движения в соответствии с командой пользователя.
[0030]
Изображение 70 окружения, проиллюстрированное на фиг. 2A, представляет состояние окружения транспортного средства-носителя в момент времени T1. Виртуальные сигналы 8c’, 8d’ поворота , показанные на фиг. 2A, являются сигналами на изображении 70 окружения на дисплее 7 и отличаются от фактических сигналов 8c, 8d поворота.
[0031]
Предположим, что, как показано на фиг. 2A, в момент времени T1 пользователь обнаруживает движущееся впереди транспортное средство 61, которое движется медленнее, чем транспортное средство-носитель 60, перед транспортным средством 60 в той же полосе движения, что и транспортное средство-носитель 60.
[0032]
Чтобы обогнать движущееся впереди транспортное средство 61, пользователь даёт команду сменить полосу движения, поворачивая переключатель 5 указателей поворота в направлении вправо. При приёме команды пользователя детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, разрешена ли смена полосы движения. В случае, если детектор 22 состояния окружения определяет, что смена полосы движения разрешена, контроллер 23 дисплея включает сигналы 8c, 8d поворота, и ЭБУ 31 управления транспортным средством начинает смену полосы движения. После этого, когда транспортное средство-носитель 60 достигает соседней полосы движения, контроллер 23 дисплея прекращает включение сигналов 8c, 8d поворота. Ниже будет приведено подробное описание для смены полосы движения по времени.
[0033]
(1) Период подготовки сигнала поворота
Период подготовки сигнала поворота – это период от поворота переключателя 5 указателей поворота в направлении вправо через контроллер 23 дисплея, который начинает мигать сигналами 8с, 8d поворота. Сигналы 8c, 8d поворота начинают мигать в то же время, когда детектор 22 состояния окружения определяет, что смена полосы движения разрешена. В противном случае момент начала мигания сигналов 8c, 8d поворота может наступить после того, как детектор 22 состояния окружения определит, что смена полосы движения разрешена, но до того, как транспортное средство-носитель 60 начнет смену полосы движения, то есть за заданное время (например, за 3 секунды) до того, как транспортное средство-носитель 60 начнет смену полосы движения. Следует отметить, что время начала мигания сигналов 8с, 8d поворота не ограничено этими примерами. Время начала мигания указателей 8с, 8d поворота может быть определено произвольно.
[0034]
В течение этого периода подготовки сигнала поворота контроллер 23 дисплея поддерживает включенным индикатор 6b указателей поворота в индикаторе 6, как показано на фиг.2А. Посредством этого включения контроллер 23 дисплея способен показывать пользователю, что сигналы 8c, 8d поворота готовятся к включению (собираются включиться) для смены полосы движения, хотя сигналы 8c, 8d поворота еще не были включены. Таким образом, пользователь может точно знать, в каком состоянии находится транспортное средство-носитель 60. Кроме того, контроллер 23 дисплея сохраняет виртуальные сигналы 8c’, 8d’ поворота включенными на дисплее 7. Посредством этого включения контроллер 23 дисплея способен показывать пользователю, что сигналы 8c, 8d поворота готовятся к включению для смены полосы движения, хотя сигналы 8c, 8d поворота еще не были включены. Таким образом, пользователь может точно знать, в каком состоянии находится транспортное средство-носитель 60.
[0035]
Когда детектор 22 состояния окружения начинает готовиться к смене полосы движения, контроллер 23 дисплея не включает сигналы 8с, 8d поворота, как показано на фиг.2А. Причина этого заключается в том, что детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, что данное состояние не подходит для смены полосы движения. Сигналы 8c, 8d поворота, которые включаются, когда транспортное средство-носитель 60 вообще не начинает смену полосы движения или не начинает её в течение длительного времени, могут отрицательно влиять на другие транспортные средства вокруг транспортного средства-носителя 60. Например, когда сигналы 8c, 8d поворота включены, другие транспортные средства (транспортные средства с автоматическим управлением), которые обнаруживают это включение, могут внезапно замедлиться, чтобы сделать расстояния между транспортными средствами и транспортным средством-носителем достаточно большими. При резком торможении пользователи других транспортных средств могут испытывать дискомфорт. Учитывая это, в варианте осуществления, даже если пользователь манипулирует переключателем 5 указателей поворота, контроллер 23 дисплея не должен включать сигналы 8c, 8d поворота по меньшей мере до тех пор, пока детектор 22 состояния окружения не определит, что смена полосы движения разрешена. Таким образом, контроллер 23 дисплея способен блокировать поведение (например, внезапное торможение других транспортных средств), которое заставит пользователей других транспортных средств испытывать дискомфорт.
[0036]
Между тем, поскольку пользователь уже манипулировал переключателем 5 указателей поворота, он может испытывать дискомфорт в случае, если система не реагирует на запрос пользователя. Следовательно, как описано выше, контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным. Кроме того, контроллер 23 дисплея также начинает поддерживать виртуальные сигналы 8c’, 8d’ поворота включенными. Таким образом, контроллер 23 дисплея способен информировать пользователя о том, что началась подготовка к смене полосы движения. Посредством этого пользователь может распознавать, что команда пользователя отражена, и может точно знать состояние транспортного средства-носителя 60. Следует отметить, что причина, по которой контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, заключается в том, что если контроллер 23 дисплея будет мигать индикатором 6b указателей поворота, то пользователь будет неправильно понимать, что сигналы 8c, 8d поворота включены, хотя сигналы 8c, 8d поворота не включены, и будет испытывать дискомфорт. В общем, индикатор 6b указателей поворота и сигналы 8c, 8d поворота ведут себя соответствующим образом. Другими словами, когда индикатор 6b указателей поворота мигает, сигналы 8c, 8d поворота также мигают. Когда индикатор 6b указателей поворота гаснет, сигналы 8c, 8d поворота также выключаются. Таким образом, если контроллер 23 дисплея не включит сигналы 8c, 8d поворота во время мигания индикатора 6b указателей поворота, пользователь будет испытывать дискомфорт. Следовательно, в варианте осуществления контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, но не включает сигналы 8c, 8d поворота. Таким образом, контроллер 23 дисплея способен снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет на транспортном средстве. Кроме того, не включая сигналы 8c, 8d поворота, контроллер 23 дисплея способен предотвращать неблагоприятное воздействие на другие транспортные средства в окружении транспортного средства-носителя 60.
[0037]
Кроме того, в случае, если детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, что смена полосы движения разрешена, контроллер 23 дисплея мигает индикатором 6b указателей поворота, а также сигналами 8c, 8d поворота. Контроллер 23 дисплея дополнительно мигает виртуальными сигналами 8c’, 8d’ поворота. Таким образом пользователь может узнать, что сигналы 8с, 8d поворота включены. Следует отметить, что никакого конкретного ограничения не накладывается на режим, в котором отображается индикатор 6b указателей поворота, когда пользователь манипулирует переключателем 5 указателей поворота, или режим, в котором отображается индикатор 6b указателей поворота в случае, если детектор 22 состояния окружения определяет, что разрешена смена полосы движения (в случае, если транспортное средство-носитель 60 начинает смену полосы движения, или в случае, если подготовка к смене полосы движения завершена), при условии, что пользователь может четко понимать, в каком состоянии находится транспортное средство-носитель 60. Другими словами, режим, в котором отображается индикатор 6b указателей поворота, не обязательно ограничен вышеописанными: режим, в котором контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, когда пользователь манипулирует переключателем 5 указателей поворота; и режим, в котором контроллер 23 дисплея мигает индикатором 6b указателей поворота, когда детектор 22 состояния окружения определяет, что смена полосы движения разрешена.
[0038]
Кроме того, в варианте осуществления, в случае, когда изменяется результат определения того, разрешена ли смена полосы движения (управление движением) (с разрешенной на не разрешённую или с не разрешенной на разрешенную), контроллер 23 дисплея изменяет режим, в котором отображается индикатор 6b указателей поворота, для отображения индикатора 6b указателей поворота таким образом, чтобы ход выполнения в период подготовки сигнала поворота и окончание периода подготовки сигнала поворота были отличимыми друг от друга. Это позволяет пользователю распознавать окончание периода подготовки сигнала поворота в момент времени, в который заканчивается период подготовки сигнала поворота.
[0039]
Ниже будет приведено описание того, как следует определить, разрешена ли смена полосы движения. Детектор 22 состояния окружения определяет, что смена полосы движения не разрешена в случае, если имеется транспортное средство, которое препятствует смене полосы движения. Детектор 22 состояния окружения определяет, что смена полосы движения не разрешена, например, в случае, если транспортное средство, приближающееся к транспортному средству-носителю 60 сзади, находится в полосе движения, в которую направляется транспортное средство-носитель 60 при маневре смены полосы движения (далее называется «соседней полосой движения»). То есть детектор 22 состояния окружения определяет, что смена полосы движения не разрешена в случае, если транспортное средство, приближающееся к транспортному средству-носителю 60 сзади, находится в соседней полосе движения. С другой стороны, детектор 22 состояния окружения определяет, что смена полосы движения разрешена, и принимает решение выполнить управление для смены полосы движения в течение заданного времени в случае, если в окружении транспортного средства-носителя 60 нет другого транспортного средства, которое препятствовало бы смене полосы движения. То есть детектор 22 состояния окружения определяет, что смена полосы движения разрешена, в случае, если другое транспортное средство, которое препятствовало бы смене полосы движения, не находится в окружении транспортного средства-носителя 60.
[0040]
(2) Период подготовки управления транспортного средства
После этого, в момент времени T2, показанный на фиг.2B, в случае, если детектор 22 состояния окружения определяет, что смена полосы движения разрешена, и ЭБУ 31 управления транспортным средством выполняет управление сменой полосы движения в течение заданного времени, то есть за заданное время (например, за три секунды) до того, как ЭБУ 31 управления транспортным средством начинает управление сменой полосы движения, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Другими словами, в случае, если ЭБУ 31 управления транспортным средством выполняет смену полосы движения в заданное время, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание, что соответствует состоянию освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных сигналов 8c’, 8d’ поворота с непрерывного включения на мигание в соответствии с состоянием освещения сигналов 8c, 8d поворота. Посредством этого контроллер 23 дисплея способен информировать пользователя о том, что в ближайшее время будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнена смена полосы движения . Таким образом контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения, прежде чем транспортное средство-носитель 60 начнет управление сменой полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления. Следует отметить, что заданное время имеет продолжительность времени от начала мигания сигналов 8с, 8d поворота до начала управления сменой полосы движения, и конкретно не ограничено. Пример заданного времени составляет три секунды. Кроме того, в случае, когда законодательство или общее правило устанавливает конкретную продолжительность, заданное время может быть установлено на определенную продолжительность времени.
[0041]
Следует отметить, что в случае, если детектор 22 состояния окружения определяет, что смена полосы движения разрешена, дисплей 7 может показывать, что управление транспортным средством (автоматическая смена полосы движения) находится на этапе подготовки, пока ЭБУ 31 управления транспортным средством фактически не выполнит управление транспортным средством. Таким образом пользователь может знать, что с этого момента будет выполняться управление движением , хотя управление движением еще не было выполнено.
[0042]
Кроме того, контроллер 23 дисплея устанавливает момент времени начала включения сигналов 8c, 8d поворота, момент времени начала включения индикатора 6b указателей поворота и момент времени начала включения дисплея для отображения подготовки на дисплее 7 отличными друг от друга. Это позволяет пользователю знать, в каком состоянии освещения находятся сигналы 8c, 8d поворота, будут ли сигналы 8c, 8d поворота включены с этого момента и будет ли управление транспортным средством осуществляться с этого момента. Следовательно, пользователь может точно знать состояние транспортного средства-носителя 60. Соответственно, контроллер 23 дисплея способен уменьшить вероятность того, что пользователь будут испытывать дискомфорт, когда пользователь едет в транспортном средстве.
[0043]
(3) Период выполнения управления транспортным средством
После этого, в случае, если ЭБУ 31 управления транспортным средством выполняет управление сменой полосы движения, то есть в случае, если истекает вышеупомянутое заданное время после того, как начался период подготовки смены полосы движения, контроллер 23 дисплея поддерживает индикатор 6b указателей поворота включенным. Кроме того, контроллер 23 дисплея поддерживает включенными сигналы 8c, 8d поворота в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея поддерживает виртуальные сигналы 8c’, 8d’ поворота включенными в соответствии с состоянием освещения сигналов 8c, 8d поворота. Таким образом, контроллер 23 дисплея способен информировать, что выполняется смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, когда транспортное средство-носитель 60 выполняет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления. Кроме того, когда смена полосы движения на соседнюю полосу движения завершается, контроллер 23 дисплея выключает индикатор 6b указателей поворота, сигналы 8c, 8d поворота и виртуальные сигналы 8c’, 8d’ поворота путем прекращения их освещенного состояния.
[0044]
Кроме того, дисплей 7 может показывать, что выполняется управление транспортным средством (автоматическая смена полосы движения). Таким образом пользователь может знать, что выполняется управление транспортным средством.
[0045]
Следует отметить, что контроллер 23 дисплея может переключать режим (например, цикл мигания, а также интенсивность и цвет мигающего света), в котором отображаются индикатор 6b указателей поворота и виртуальный сигнал 8c’, 8d’ поворота между периодом подготовки управления транспортным средством и периодом выполнения управления транспортным средством. Таким образом пользователь может точно знать, что осуществляется управление транспортным средством. Кроме того, переключение режима отображения сигналов 8c, 8d поворота контроллером 23 дисплея также позволяет пользователям других транспортных средств знать, что осуществляется управление транспортным средством. Следует отметить, что переключение режима, в котором отображаются индикатор 6b указателей поворота, сигналы 8c, 8d поворота и виртуальные сигналы 8c’, 8d’ поворота между периодом подготовки управления транспортным средством и периодом выполнения управления транспортным средством, может выполняться только тогда, когда транспортное средство-носитель 60 выполняет автоматическое управление. Таким образом пользователь может точно знать, что осуществляется управление транспортным средством в режиме автоматического управления. Кроме того, пользователи других транспортных средств также могут знать, что транспортное средство-носитель 60 движется не так, как обычно, например что транспортное средство-носитель 60 выполняет автоматическое управление, поскольку сигналы 8с, 8d поворота мигают по–другому.
[0046]
Как описано выше, когда система выполняет смену полосы движения, контроллер 23 дисплея устанавливает момент времени начала включения сигналов 8c, 8d поворота и момент времени начала включения индикатора 6b указателей поворота отличными друг от друга. В частности, в то время как детектор 22 состояния окружения готовится к смене полосы движения, контроллер 23 дисплея поддерживает включенным индикатор 6b указателей поворота, но не включает сигналы 8c, 8d поворота. Другими словами, контроллер 23 дисплея включает индикатор 6b указателей поворота перед включением сигналов 8c, 8d поворота.
[0047]
После этого, в случае, если детектор 22 состояния окружения определяет, что подготовка смены полосы движения завершена, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключенного на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота.
[0048]
Благодаря такому управлению освещением контроллер 23 дисплея способен снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет в транспортном средстве. То есть, поскольку контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, когда пользователь манипулирует переключателем 5 указателей поворота, пользователь может знать, что команда пользователя была отражена, и может точно знать, в каком состоянии находится транспортное средство-носитель 60. Кроме того, после завершения периода подготовки сигнала поворота контроллер 23 дисплея мигает индикатором 6b указателей поворота и сигналами 8c, 8d поворота и, соответственно, пользователь может знать, что в ближайшее время будет выполнена смена полосы движения.
[0049]
Рассмотренный выше пример того, как работает система, является примером того, как система работает для выполнения смены полосы движения в соответствии с одной командой пользователя. При автоматическом управлении имеет место случай, когда система выполняет смену полосы движения в соответствии с двумя командами пользователя. Ниже будет приведено описание для примера того, как работает система в соответствии с двумя командами пользователя.
[0050]
(1) Период подготовки сигнала поворота
Предположим, что, как показано на фиг. 2A, в момент времени T1 пользователь обнаруживает движущееся впереди транспортное средство 61, которое движется медленнее, чем транспортное средство-носитель 60, перед транспортным средством 60 в той же полосе движения, что и транспортное средство-носитель 60.
[0051]
Чтобы обогнать движущееся впереди транспортное средство 61, пользователь вводит команду сменить полосу движения, поворачивая переключатель 5 указателей поворота в направлении вправо. Эта команда называется «первой командой». Период с момента приёма первой команды до того, как контроллер 23 дисплея начинает мигать сигналами 8с, 8d поворота, называется «периодом подготовки сигналов поворота». Сигналы 8c, 8d поворота начинают мигать в то же время, когда детектор 22 состояния окружения определяет, что смена полосы движения разрешена. В противном случае момент времени начала мигания сигналов 8c, 8d поворота может наступить после того, как детектор 22 состояния окружения определит, что смена полосы движения разрешена, но перед тем, как транспортное средство-носитель 60 начнет изменение полосы движения, то есть за заданное время (например, за 3 секунды) до того, как транспортное средство-носитель 60 начнет смену полосы движения. Следует отметить, что момент времени начала мигания сигналов 8с, 8d поворота не ограничен этими примерами. Момент времени начала мигания сигналов 8с, 8d поворота может быть определен произвольно. В это время контроллер 23 дисплея начинает поддерживать включенным индикатор 6b указателей поворота, как показано на фиг.2А. Кроме того, контроллер 23 дисплея начинает поддерживать включенными виртуальные сигналы 8c’, 8d’ поворота . Таким образом пользователь может знать, что система начала подготовку к смене полосы движения, и может точно знать состояние транспортного средства-носителя 60. Рассмотренный выше способ освещения для периода подготовки сигналов поворота является таким же, как способ освещения, используемый в случае, если система выполняет смену полосы движения в соответствии с одной командой пользователя.
[0052]
(2) Период подготовки управления транспортным средством
После этого в момент времени T2, показанный на фиг. 2B, в случае, если детектор 22 состояния окружения определяет, что смена полосы движения разрешена в течение заданного времени, то есть за заданное время (например, за три секунды) до того, как ЭБУ 31 управления транспортным средством начинает управление сменой полосы движения, система информирует пользователя о том, что подготовка к смене полосы движения завершена. Например, система запрашивает у пользователя вторую команду путём произнесения через громкоговоритель: «Подготовка к смене полосы движения завершена. Включите переключатель указателей поворота, повернув его в направлении вправо». Поскольку пользователь знает, что система начинает подготовку к смене полосы движения, до получения этого уведомления, он не испытывает дискомфорта при получении уведомления. После получения уведомления пользователь включает переключатель 5 указателей поворота. Это называется «второй командой». После приёма второй команды контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных сигналов 8c’, 8d’ поворота с непрерывного включения на мигание в соответствии с состоянием освещения сигналов 8c, 8d поворота. Посредством этого контроллер 23 дисплея способен информировать пользователя о том, что в ближайшее время будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнена смена полосы движения. Таким образом контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения, прежде чем транспортное средство-носитель 60 начнет управление сменой полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления. Вышеописанный способ освещения для периода подготовки управления транспортным средством является таким же, как способ освещения, используемый в случае, когда система выполняет смену полосы движения в соответствии с одной командой пользователя.
[0053]
(3) Период выполнения управления транспортным средством
После этого, в случае, если ЭБУ 31 управления транспортным средством выполняет управление сменой полосы движения, то есть в случае, если истекает вышеупомянутое заданное время после начала периода подготовки смены полосы движения, контроллер 23 дисплея поддерживает индикатор 6b указателей поворота включенным. Кроме того, контроллер 23 дисплея поддерживает включенными сигналы 8c, 8d поворота в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея поддерживает включенными виртуальные сигналы 8c’, 8d’ поворота в соответствии с состоянием освещения сигналов 8c, 8d поворота. Таким образом контроллер 23 дисплея способен информировать, что выполняется смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, когда транспортное средство-носитель 60 выполняет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 выполняет смену полосы движения. Вышеописанный способ освещения для периода выполнения управления транспортным средством является таким же, как способ освещения, используемый в случае, когда система выполняет смену полосы движения в соответствии с одной командой пользователя.
[0054]
Следует отметить, что, хотя детектор 22 состояния окружения проверяет состояние окружения после первой команды пользователя, проверка состояния окружения не ограничена этим моментом времени. После первой команды пользователь может проверить состояние окружения и выдать вторую команду. Ни первая, ни вторая команды пользователя не ограничены командой, выдаваемой посредством выполняемой пользователем манипуляции переключателем 5 указателей поворота. Пользователь может выдать первую и вторую команды посредством манипуляции другим переключателем или используя систему голосового ввода.
[0055]
Рассмотренный выше пример того, как работает система, является примером того, как система работает для выполнения смены полосы движения в соответствии с одной или двумя командами пользователя. При автоматическом управлении имеет место случай, когда система выполняет смену полосы движения на основании подтверждения пользователем определения системы. Ниже будет приведено описание для примера того, как работает система при запросе подтверждения от пользователя. Следует отметить, что подтверждение от пользователя является своего рода командой.
[0056]
(1) Период подготовки сигнала поворота
Предположим, что, как показано на фиг.2А, в момент времени T1 детектор 22 состояния окружения обнаруживает движущееся впереди транспортное средство 61, которое движется медленнее, чем транспортное средство-носитель 60, перед транспортным средством 60 в той же полосе движения, в которой движется транспортное средство-носитель 60. Контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, чтобы позволить системе информировать пользователя о том, что смена полосы движения разрешена. Контроллер 23 дисплея начинает поддерживать виртуальные сигналы 8c’, 8d’ поворота включенными. Таким образом пользователь может знать, что система распознает условия, допускающие смену полосы движения, и может точно знать состояние транспортного средства-носителя 60. Рассмотренный выше способ освещения для периода подготовки сигнала поворота является таким же, как способ освещения, используемый в случае, когда система выполняет смену полосы движения в соответствии с одной командой пользователя.
[0057]
(2) Период подготовки управления транспортным средством
После этого, в момент времени T2, показанный на фиг.2B, в случае, когда детектор 22 состояния окружения определяет, что смена полосы движения разрешена в заданное время, система информирует пользователя о том, что подготовка к смене полосы движения завершена. Например, система запрашивает подтверждение от пользователя путём произнесения через громкоговоритель: «Подготовка к смене полосы движения завершена. Включите переключатель указателей поворота, повернув его в направлении вправо». Поскольку до получения этого уведомления пользователь знает, что система начала подготовку к смене полосы движения, он не испытывает дискомфорт, когда получает уведомление. Как только пользователь включает переключатель 5 указателей поворота, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных сигналов 8c’, 8d’ поворота с непрерывного включения на мигание в соответствии с состоянием освещения сигналов 8c, 8d поворота. Посредством этого контроллер 23 дисплея способен информировать пользователя о том, что в ближайшее время будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнена смена полосы движения. Таким образом контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения, прежде чем транспортное средство-носитель 60 начнет управление сменой полосы движения. Таким образом, другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления. Следует отметить, что период подготовки управления транспортным средством может быть определен как период до тех пор, пока пользователь не включит переключатель 5 указателей поворота, или период до тех пор, пока ЭБУ 31 управления транспортным средством не начнет управление транспортным средством. Вышеописанный способ освещения для периода подготовки управления транспортным средством является таким же, как и способ освещения, используемый в случае, когда система выполняет смену полосы движения в соответствии с одной командой пользователя.
[0058]
(3) Период выполнения управления транспортным средством
После этого, в случае, если ECU 31 управления транспортным средством выполняет управление изменением полосы движения, то есть в случае, если после начала периода подготовки смены полосы движения прошло вышеупомянутое заданное время, контроллер дисплея 23 поддерживает индикатор 6b указателей поворота включенным. Кроме того, контроллер дисплея 23 поддерживает сигналы 8c, 8d поворота включенными в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер дисплея 23 поддерживает включёнными виртуальные сигналы 8c', 8d' поворота в соответствии с состоянием освещения сигналов 8c, 8d поворота. Этим контроллер 23 дисплея способен сообщить, что происходит смена полосы движения. Кроме того, путём мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, когда транспортное средство-носитель 60 выполняет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств, что транспортное средство-носитель 60 выполняет смену полосы движения. Рассмотренный выше способ освещения для периода выполнения управления транспортным средством такой же, как и способ освещения, используемый в случае, когда система выполняет смену полосы движения в соответствии с одной командой пользователя.
[0059]
Далее, обращаясь к фиг. 3A и 3B, будет приведено описание для примера того, как устройство 100 управления отображением работает для левого поворота, который будет выполняться при автоматическом управлении. Следует отметить, что описание с использованием фиг. 3A и последующих чертежей будет приведено для примера того, как устройство 100 управления отображением работает при осуществлении автоматического управления в соответствии с одной командой пользователя. Описание для примеров того, как устройство 100 управления отображением работает при осуществлении автоматического управления в соответствии с двумя командами пользователя и в соответствии с подтверждением пользователя не будет приведено. Само собой разумеется, что автоматическое управление на основании двух команд пользователя и на основании подтверждения от пользователя применимо к примеру того, как работает устройство 100 управления отображением, которое будет описано с использованием фиг. 3A и последующих чертежей.
[0060]
Как показано на фиг. 3A, во время T1, для выполнения левого поворота на перекрестке пользователь вводит команду для левого поворота, поворачивая переключатель 5 указателей поворота в направлении влево. При приёме команды пользователя детектор 22 состояния окружения начинает подготовку к левому повороту. Например, детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, разрешен ли левый поворот. Когда детектор 22 состояния окружения начинает подготовку к левому повороту, контроллер 23 дисплея начинает поддерживать индикатор 6a указателей поворота включенным, как показано на фиг. 3A. Кроме того, контроллер 23 дисплея начинает поддерживать виртуальные сигналы 8a', 8b' поворота включенными. Таким образом пользователь может распознать, что система начала подготовку к левому повороту, и может точно знать состояние транспортного средства-носителя 60. Когда детектор 22 состояния окружения начинает подготовку к левому повороту, контроллер 23 дисплея не включает сигнал 8a поворота, как показано на фиг. 3A. Это связано с тем, что подготовка к левому повороту еще не завершена.
[0061]
После этого, во время T2, проиллюстрированное на фиг. 3B, в случае, если детектор 22 состояния окружения определяет, что левый поворот в заданное время разрешён, контроллер 23 дисплея изменяет состояние освещения индикатора 6a указателей поворотов из состояния непрерывного включения в состояние мигания. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8a, 8b поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6a указателей поворотов. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных сигналов 8a', 8b' поворота из состояния непрерывного включения в состояние мигания в соответствии с состоянием освещения сигналов 8a, 8b поворота. Этим контроллер 23 дисплея способен сообщить пользователю, что подготовка к левому повороту завершена и в ближайшее время будет выполнен левый поворот. Кроме того, посредством мигания сигнала 8а, 8b поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнен левый поворот. Таким образом контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить левый поворот, прежде чем транспортное средство-носитель 60 начнет управление левым поворотом. Таким образом другие транспортные средства могут препятствовать поведению, которое вызовет дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0062]
Хотя фиг. 3А и 3В поясняют, как устройство 100 управления отображением работает для левого поворота, работа устройства 100 управления отображением не ограничена левым поворотом. Устройство 100 управления отображением работает для правого поворота так же, как и в случае левого поворота.
[0063]
Далее с обращением к фиг. 4A и 4B будет приведено описание для другого примера того, как устройство 100 управления отображением работает для смены полосы движения, которая должна выполняться посредством автоматического управления. Фиг. 4А и 4В отличает от фиг. 2A и 2B то, что на фиг. 4А и 4В присутствует следующее сзади транспортное средство 62. Виртуальные стоп–сигналы 9a’, 9b’ (индикаторы торможения), показанные на фиг. 4A, представляют виртуальные стоп–сигналы на изображении 70 окружения и отличаются от фактических стоп–сигналов 9a, 9b.
[0064]
Предположим, что, как показано на фиг.4А, в момент времени T1 пользователь обнаруживает движущееся впереди транспортное средство 61, которое движется медленнее, чем транспортное средство-носитель 60, перед транспортным средством 60 в той же полосе движения, в которой движется транспортное средство-носитель 60.
[0065]
(1) Период подготовки сигнала поворота
Чтобы обогнать движущееся впереди транспортное средство 61, пользователь выдаёт команду на смену полосы движения, поворачивая переключатель 5 указателей поворота в направлении вправо. При приёме команды пользователя детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, разрешена ли смена полосы движения. В это время контроллер 23 дисплея начинает поддерживать включенным индикатор 6b указателей поворота, как показано на фиг.4А. Кроме того, контроллер 23 дисплея начинает поддерживать виртуальные сигналы 8c’, 8d’ поворота включенными на дисплее 7. Таким образом пользователь может распознать, что система начала подготовку к смене полосы движения, и может точно знать состояние транспортного средства-носителя 60.
[0066]
Когда детектор 22 состояния окружения начинает подготовку к смене полосы движения, контроллер 23 дисплея не включает сигналы 8с, 8d поворота, как показано на фиг.4А. Причина этого заключается в том, что детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, что состояние не подходит для смены полосы движения.
[0067]
Как показано на фиг.4А, в момент времени T1 детектор 22 состояния окружения определяет, что смена полосы движения не разрешена, поскольку следующее сзади транспортное средство 62 находится в соседней полосе движения. Таким образом система проверяет, следует ли привести в действие тормоза для отдаления движущегося сзади транспортного средства 62 от транспортного средства-носителя 60. Детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 для определения, разрешено ли замедление. В ситуации, показанной на фиг.4А, детектор 22 состояния окружения, например, обнаруживает состояние движущегося впереди транспортного средства 61, чтобы определить, разрешено ли замедление. Во время T1, если система начнет замедление сразу после того, как детектор 22 состояния окружения определяет, что замедление разрешено, пользователь будет испытывать дискомфорт. Следовательно, контроллер 23 дисплея мигает виртуальными стоп-сигналами 9a’, 9b’, прежде чем система начнет приводить в действие тормоза, как показано на фиг. 4A. Таким образом, до того, как система приведёт в действие тормоза, контроллер 23 дисплея способен информировать пользователя о том, что будут приведены в действие тормоза. Это снижает вероятность того, что пользователь будут испытывать дискомфорт, даже если тормоза действительно приведены в действие. Следует отметить, что причина, по которой контроллер 23 дисплея мигает виртуальными стоп-сигналами 9a’, 9b’, заключается в том, что пользователь будет испытывать дискомфорт, если контроллер 23 дисплея начнет поддерживать включенными виртуальные стоп-сигналы 9a’, 9b’. Когда тормоза приводятся в действие, стоп–сигналы 9а, 9b обычно остаются включенными. Поэтому, если виртуальные стоп–сигналы 9a’, 9b’ будут оставаться включенными, когда тормоза не приводятся в действие, пользователь будет испытывать дискомфорт. Принимая это во внимание, контроллер 23 дисплея мигает виртуальными стоп–сигналами 9a’, 9b’, чтобы снизить вероятность дискомфорта для пользователя.
[0068]
(2) Период подготовки управления транспортным средством
Предположим, что после этого во время T2, показанное на фиг. 4B, система приводит в действие тормоза, и следующее сзади транспортное средство 62 отдаляется от транспортного средства-носителя 60. Во время T2, поскольку система задействует тормоза, стоп–сигналы 9a, 9b поддерживаются включенными. Контроллер 23 дисплея изменяет состояние освещения виртуальных стоп–сигналов 9a’, 9b’ с мигания на постоянное включение в соответствии с состоянием освещения стоп–сигналов 9a, 9b.
[0069]
Кроме того, во время T2, показанное на фиг.4В, в случае, если детектор 22 состояния окружения определяет, что смена полосы движения разрешена, и ЭБУ 31 управления транспортным средством собирается выполнить управление сменой полосы движения в течение заданного времени, то есть за заданное время (например, за три секунды) до того, как ЭБУ 31 управления транспортным средством начнет управление сменой полосы движения, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных сигналов 8c’, 8d’ поворота с непрерывного включения на мигание в соответствии с состоянием освещения сигналов 8c, 8d поворота. Посредством этого контроллер 23 дисплея способен информировать пользователя о том, что подготовка к смене полосы движения завершена, и скоро будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнена смена полосы движения. Таким образом контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения, прежде чем транспортное средство-носитель 60 начнет управление сменой полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0070]
(3) Период выполнения управления транспортным средством
После этого, в случае, если ЭБУ 31 управления транспортным средством выполняет управление сменой полосы движения, то есть в случае, когда истекает вышеупомянутое заданное время после того, как начался период подготовки смены полосы движения, контроллер 23 дисплея поддерживает индикатор 6b указателей поворота включенным. Кроме того, контроллер 23 дисплея поддерживает включенными сигналы 8c, 8d поворота в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея поддерживает виртуальные сигналы 8c’, 8d’ поворота включенными в соответствии с состоянием освещения сигналов 8c, 8d поворота. Посредством этого контроллер 23 дисплея способен информировать, что выполняется смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, когда транспортное средство-носитель 60 выполняет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления. Кроме того, когда смена полосы движения на соседнюю полосу завершена, контроллер 23 дисплея выключает индикатор 6b указателей поворота, сигналы 8c, 8d поворота и виртуальный сигнал 8c', 8d' поворота, прекращая их освещенное состояние.
[0071]
Далее, обращаясь к фиг. 5A и 5B, будет приведено описание для примера того, как устройство 100 управления отображением работает для замедления, которое будет выполняться посредством автоматического управления.
[0072]
Предположим, что, как показано на фиг. 5А, во время T1 пользователь обнаруживает движущиеся впереди транспортные средства 61, 63 перед транспортным средством-носителем 60, соответственно, в той же полосе движения, в которой движется транспортное средство-носитель 60, и в соседней полосе движения.
[0073]
(1) Период подготовки сигнала поворота
Поскольку смена полосы движения не изменит ситуацию, пользователь выдаёт команду на замедление таким образом, чтобы обеспечить расстояние между транспортными средствами до движущегося впереди транспортного средства 61. Эта команда для замедления осуществляется в результате манипуляции со стороны пользователя, например, переключателем торможения, установленным в салоне транспортного средства. При приёме команды пользователя детектор 22 состояния окружения начинает подготовку к замедлению. Например, детектор 22 состояния окружения проверяет состояние окружения транспортного средства 60 и определяет, разрешено ли замедление. В ситуации, иллюстрированной на фиг. 5A, детектор 22 состояния окружения обнаруживает состояние движущегося впереди транспортного средства 61, и определяет, разрешено ли замедление.
[0074]
(2) Период подготовки управления транспортным средством
Во время T1, если система начнет замедление сразу же после того, как детектор 22 состояния окружения определяет, что замедление разрешено, пользователь будет испытывать дискомфорт. Таким образом, контроллер 23 дисплея вызывает мигание виртуальных стоп-сигналов 9a', 9b', прежде чем система приводит в действие тормоза, как показано на фиг. 5A. Таким образом, прежде чем система приведёт в действие тормоза, контроллер 23 дисплея способен информировать пользователя, что будет приведен в действие тормоз. Это снижает вероятность того, что пользователь будет испытывать дискомфорт, даже если тормоз будет на самом деле приведен в действие.
[0075]
(3) Период управления транспортным средством
После этого, во время T2, проиллюстрированное на фиг. 5B, так как система приводит в действие тормоза, стоп-сигналы 9a, 9b поддерживаются включенными. Контроллер 23 дисплея изменяет состояние освещения виртуальных стоп-сигналов 9a', 9b' с мигания на непрерывное включение в соответствии с состоянием освещения стоп-сигналов 9a, 9b. Таким образом контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60, что транспортное средство–носитель 60 замедляется.
[0076]
Далее, обращаясь к фиг. 6A и 6B, будет приведено описание для другого примера того, как устройство 100 управления отображением работает для смены полосы движения, которая будут выполняться посредством автоматического управления. Отличие фиг. 6A и 6B от фига. 2A и 2B состоит в том, что на фиг. 6A и 6B присутствует движущееся сзади транспортное средство 62. Виртуальные фары 10a', 10b' иллюстрированные на фиг. 6A, представляют собой виртуальные фары на изображении 70 окружения, и отличаются от фактических фар 10a, 10b.
[0077]
Предположим, что, как показано на фиг. 6А, во время T1 пользователь обнаруживает движущееся впереди транспортное средство 61, которое движется медленнее, чем транспортное средство-носитель 60, перед транспортным средством 60 в той же полосе движения, в которой движется транспортное средство-носитель 60.
[0078]
(1) Период подготовки сигнала поворота
Для того, чтобы обогнать движущееся впереди транспортное средство 61, пользователь выдаёт команду на смену полосы движения, поворачивая переключатель 5 указателей поворота в направлении вправо. При приёме команды пользователя детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60, и определяет, разрешена ли смена полосы движения. В это время контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, как показано на фиг. 6A. Кроме того, контроллер 23 дисплея начинает поддерживать включенными виртуальные сигналы 8c', 8d' поворота. Таким образом пользователь может распознавать что система начала подготовку к смене полосы движения, и может точно знать состояние транспортного средства-носителя 60.
[0079]
Когда детектор 22 состояния окружения начинает подготовку к смене полосы движения, контроллер 23 дисплея не включает сигналы 8с, 8d поворота, как показано на фиг.6А. Причина этого состоит в том, что детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, что состояние не подходит для смены полосы движения.
[0080]
Как показано на фиг.6А, во время T1 детектор 22 состояния окружения определяет, что смена полосы движения не разрешена, поскольку движущееся сзади транспортное средство 62 находится в соседней полосе движения. Следовательно, система проверяет, следует ли ускорить транспортное средство-носитель 60 с целью отдаления движущегося сзади транспортного средства 62 от транспортного средства-носителя 60. Детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60, чтобы определить, разрешено ли ускорение. В ситуации, показанной на фиг.6А, детектор 22 состояния окружения обнаруживает состояние движущегося впереди транспортного средства 61, чтобы определить, разрешено ли ускорение. Во время T1, если система начнет ускорение сразу после того, как детектор 22 состояния окружения определит, что ускорение разрешено, пользователь будет испытывать дискомфорт. Следовательно, контроллер 23 дисплея мигает виртуальными фарами 10a’, 10b’ прежде чем система начнёт ускорение, как показано на фиг. 6A. Таким образом, перед тем, как система начнёт ускорение, контроллер 23 дисплея способен информировать пользователя о том, что система собирается начать ускорение. Это снижает вероятность того, что пользователь будет испытывать дискомфорт, даже если система фактически начинает ускорение. В связи с этим, как показано на фиг.6А, контроллер 23 дисплея мигает виртуальными фарами 10a’, 10b’, но не включает фактические фары 10a, 10b.
[0081]
(2) Период подготовки управления транспортным средством
Предположим, что после этого, во время T2, показанное на фиг.6B, система ускоряет транспортное средство-носитель 60, и движущееся сзади транспортное средство 62 отдаляется от транспортного средства-носителя 60. Во время T2, поскольку система ускоряет транспортное средство-носитель 60, контроллер 23 дисплея изменяет состояние освещения виртуальных фар 10a’, 10b’ с мигания на непрерывное включение. Таким образом контроллер 23 дисплея способен информировать пользователя о том, что транспортное средство-носитель 60 ускоряется.
[0082]
В момент времени T2, в случае, если детектор 22 состояния окружения определяет, что смена полосы движения разрешена, и ЭБУ 31 управления транспортным средством собирается выполнять управление сменой полосы движения в течение заданного времени, то есть за заданное время (например, за три секунды) до того, как ЭБУ 31 управления транспортным средством начнет управление сменой полосы движения, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключенного состояния на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных сигналов 8c’, 8d’ поворота с непрерывного включения на мигание в соответствии с состоянием освещения сигналов 8c, 8d поворота. Посредством этого контроллер 23 дисплея способен информировать пользователя о том, что подготовка к смене полосы движения завершена, и скоро будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения в заданное время. Таким образом контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения, прежде чем транспортное средство-носитель 60 начнет управление сменой полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызовет дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0083]
(3) Период выполнения управления транспортным средством
После этого, в случае, если ЭБУ 31 управления транспортным средством выполняет управление сменой полосы движения, то есть в случае, когда проходит вышеупомянутое заданное время с начала периода подготовки смены полосы движения, контроллер 23 дисплея поддерживает индикатор 6b указателей поворота включенным. Кроме того, контроллер 23 дисплея сохраняет сигналы 8c, 8d поворота включенными в соответствии с состоянием освещения индикатора 6b указателей поворота. Кроме того, контроллер 23 дисплея поддерживает виртуальные сигналы 8c', 8d' поворота включенными в соответствии с состоянием освещения сигналов 8c, 8d поворота. Этим контроллер 23 дисплея способен сообщить, что происходит смена полосы движения. Кроме того, посредством мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60, что транспортное средство-носитель 60 выполняет смену полосы движения. Таким образом, когда транспортное средство-носитель 60 выполняет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство 60 выполняет смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызовет дискомфорт у пользователей других транспортных средств, например, путём заблаговременного увеличения расстояния между транспортными средствами посредством замедления. Кроме того, когда смена полосы движения на соседнюю полосу движения завершена, контроллер 23 дисплея выключает индикатор 6b указателей поворота, сигналы 8c, 8d поворота и виртуальный сигнал 8c', 8d' поворота, прекращая их освещенное состояние.
[0084]
Хотя фиг. 6A и 6B иллюстрируют, что контроллер 23 дисплея управляет состоянием освещения виртуальных фар 10a', 10b', чтобы заранее сообщить пользователю, что система собирается ускорить транспортное средство-носитель 60, способ информирования пользователя о том, что система собирается ускорить транспортное средство-носитель 60 не ограничен управлением состоянием освещения виртуальных фар 10a', 10b'. Например, как показано на изображениях 70, 71 окружения на фиг. 7A, контроллер 23 дисплея может отображать транспортное средство-носитель 60, как будто транспортное средство–носитель 60 многократно выполняет движение на задних колёсах. Таким образом, перед тем, как система начнет ускорение, контроллер 23 дисплея способен информировать пользователя о том, что система собирается начать ускорение. В противном случае, как показано на фиг. 7B, когда система ускоряет транспортное средство-носитель 60, контроллер 23 дисплея может отображать транспортное средство-носитель 60 на изображении 70 окружения, как будто транспортное средство–носитель 60 продолжает выполнять движение на задних колёсах.
[0085]
Далее, обращаясь к блок-схемам на фиг. 8A и 8B, будет приведено описание для примера того, как работает устройство 100 управления отображением в соответствии с вариантом осуществления.
[0086]
На этапе S101 устройство 100 управления отображением определяет, выполняет ли транспортное средство-носитель 60 автоматическое управление. Например, в случае, когда включен переключатель управления, установленный на транспортном средстве–носителе 60, устройство 100 управления отображением определяет, что транспортное средство–носитель 60 выполняет автоматическое управление. С другой стороны, в случае выключения переключателя управления устройство 100 управления отображением определяет, что транспортное средство–носитель 60 не выполняет автоматическое управление. Если транспортное средство-носитель 60 выполняет автоматическое управление (если Да на этапе S101), процесс переходит к этапу S103. С другой стороны, если транспортное средство-носитель 60 хозяина не выполняет автоматическое управление (если нет на этапе S101), процесс находится в состоянии ожидания.
[0087]
На этапе S103, если от пользователя приходит команда на смену полосы движения (если Да на этапе S103), процесс переходит к этапу S105. С другой стороны, если команда на смену полосы движения не приходит от пользователя (если Нет на этапе S103), то процесс переходит к этапу S119. На этапе S105 детектор 22 состояния окружения начинает подготовку к смене полосы движения. Детектор 22 состояния окружения проверяет состояние окружения транспортного средства 60 и определяет, разрешена ли смена полосы движения. После того, как детектор 22 состояния окружения начинает подготовку к смене полосы движения, контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, как показано на фиг. 2A. Кроме того, контроллер 23 дисплея начинает поддерживать включенными виртуальные сигналы 8c', 8d' поворота. Таким образом пользователь может распознавать, что система начала подготовку к смене полосы движения, и может точно знать состояние транспортного средства-носителя 60. Если смена полосы движения не разрешена (если Нет в шаге S107), процесс переходит к этапам S109 и S111, на которых контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенными без включения сигналов 8c, 8d поворота, как показано на фиг. 2A. После этого процесс переходит к этапу S117. С другой стороны, если смена полосы движения в заданное время разрешена (если Да на этапе S107), процесс переходит к этапам S113 и S115, на которых контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с состояния непрерывного включения на состояние мигания, как показано на фиг. 2B. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключенного состояния на состояние мигания в соответствии с состоянием освещения индикатора 6b указателей поворота. Этим контроллер 23 дисплея способен информировать пользователя о том, что подготовка смены полосы движения завершена и в ближайшее время будет выполнена смена полосы движения. Кроме того, посредством мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнена смена полосы движения . Таким образом, прежде чем транспортное средство-носитель 60 начинает управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызовет дискомфорт у пользователей других транспортных средств, например, путём заблаговременного увеличения расстояния между транспортными средствами посредством замедления. После этого процесс переходит к этапу S117.
[0088]
На этапе S117 ЭБУ 31 управления транспортным средством определяет, была ли завершена смена полосы движения. Стандарт для определения того, была ли завершена смена полосы движения, может быть установлен произвольно. Например, ЭБУ 31 управления транспортным средством может определить, что смена полосы движения завершена, когда транспортное средство-носитель 60 пересекает белую линию (разграничительную линию). Кроме того, ЭБУ 31 управления транспортным средством может определить, что смена полосы движения завершена, когда 80% корпуса транспортного средства переходит на соседнюю полосу движения. В противном случае, ЭБУ 31 управления транспортным средством может определить, что смена полосы движения завершена, когда корпус транспортного средства полностью переходит на соседнюю полосу движения. Если смена полосы движения завершена (если Да на этапе S117), процесс переходит к этапу S135, на котором контроллер 23 дисплея выключает индикатор 6b указателей поворота и сигналы 8c, 8d поворота. С другой стороны, если смена полосы еще не завершена (если Нет на этапе S117), процесс возвращается к этапу S105.
[0089]
На этапе S119, если от пользователя приходит команда для замедления или остановки (если Да на этапе S119), процесс переходит к этапу S121. С другой стороны, если от пользователя не приходит команда для замедления или остановки (если Нет на этапе S119), процесс переходит к этапу S135. На этапе S121 детектор 22 состояния окружения начинает подготовку к замедлению или остановке. Детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, разрешено ли замедление или остановка. Когда детектор 22 состояния окружения начинает подготовку к замедлению или остановке, контроллер 23 дисплея мигает виртуальными стоп-сигналами 9a', 9b', как показано на фиг. 5A. Таким образом, прежде чем система начнет приводить в действие тормоз, контроллер 23 дисплея способен информировать пользователя, что будет приведён в действие тормоз. Это снижает вероятность того, что пользователь будет испытывать дискомфорт, даже если тормоз на самом деле будет приведён в действие.
[0090]
Если замедление или остановка не разрешены (если Нет на этапе S123), процесс переходит к этапам S125 и S127, на которых контроллер 23 дисплея мигает виртуальными стоп-сигналами 9a', 9b', но не включает стоп-сигналы 9a, 9b, как показано на фиг. 5A. После этого процесс переходит к этапу S133.
[0091]
С другой стороны, если замедление или остановка разрешены (если Да на этапе S123), система приводит в действие тормоз. Процесс переходит к этапам S129 и S131, на которых контроллер 23 дисплея начинает поддерживать включенными стоп–сигналы 9a, 9b, как показано на фиг. 5B. Кроме того, контроллер 23 дисплея изменяет состояние освещения виртуальных стоп-сигналов 9a’, 9b’ с мигания на непрерывное включение в соответствии с состоянием освещения стоп-сигналов 9a, 9b. После этого процесс переходит к этапу S133.
[0092]
Если замедление или остановка завершены (если Да на этапах S113), процесс переходит к этапу S135. С другой стороны, если замедление или остановка еще не завершены (если Нет на этапах S113), процесс возвращается к этапу S121. Если автоматическое управление завершено (если Да на этапе S135), последовательность этапов заканчивается. С другой стороны, если автоматическое управление еще не завершено (если Нет на этапе S135), процесс возвращается к этапу S103.
[0093]
(Работа и эффекты)
Как описано выше, устройство 100 управления отображением в соответствии с вариантом осуществления получает следующую работу и эффекты.
[0094]
Когда система выполняет смену полосы движения или поворот вправо или влево, устройство 100 управления отображением устанавливает момент времени начала включения сигнала 8 поворота и момент времени начала включения индикатора указателей поворота отличными друг от друга. Таким образом пользователь может точно знать состояние транспортного средства-носителя 60. Соответственно, устройство 100 управления отображением способно снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет в транспортном средстве.
[0095]
Кроме того, устройство 100 управления отображением включает индикатор указателей поворота перед включением сигнала 8 поворота. Например, как показано на фиг. 2A, в случае, если детектор 22 состояния окружения проверяет состояние окружения транспортного средства-носителя 60 и определяет, разрешена ли смена полосы движения, контроллер 23 дисплея начинает поддерживать индикатор 6b указателей поворота включенным, но не включает сигналы 8c, 8d поворота. Другими словами, контроллер 23 дисплея включает индикатор 6b указателей поворота перед включением сигналов 8c, 8d поворота. Таким образом контроллер 23 дисплея способен показывать пользователю, что сигналы 8c, 8d поворота находятся на этапе подготовки к включению (собираются включиться) для смены полосы движения, хотя сигналы 8c, 8d поворота еще не включены. Таким образом пользователь может точно знать состояние транспортного средства-носителя 60.
[0096]
Момент времени начала включения индикатора указателей поворота и момент времени перехода от подготовки смены полосы движения к началу управления сменой полосы движения отличаются друг от друга. В варианте осуществления момент времени начала включения индикатора указателей поворота представляет собой время, в течение которого готовится смена полосы движения, но не время, в которое начинается управление сменой полосы движения. Хотя индикатор указателей поворота начинает включаться, когда пользователь манипулирует переключателем 5 указателей поворота, момент времени, в который начинает мигать индикатор указателей поворота, не обязательно соответствует моменту времени, когда включается сигнал 8 поворота. Например, в случае, если пользователь выдает команду на обгон движущегося впереди транспортного средства со сменой полосы движения во время автоматического управления, может иметь место случай, когда система не может выполнить смену полосы движения сразу после команды. В этом случае система должна начать выполнять управление сменой полосы движения только после нахождения подходящего момента времени (например, времени, когда другие транспортные средства исчезнут из окружения транспортного средства-носителя). Сигнал 8 поворота должен начать включаться в момент времени, когда система начинает выполнять управление сменой полосы движения. В случае, если сигнал 8 поворота начинает включаться в момент, когда пользователь манипулирует переключателем 5 указателя поворота, включение может отрицательно повлиять на движение других транспортных средств в окружении транспортного средства-носителя, поскольку включение начато слишком рано. Например, считается, что когда включается сигнал 8 поворота, другие транспортные средства в окружении транспортного средства-носителя 60 обнаруживают это включение и применяют внезапное торможение, чтобы увеличить расстояние между транспортными средствами до транспортного средства-носителя 60. Такое внезапное торможение может вызвать дискомфорт у пользователей других транспортных средств.
[0097]
Следовательно, в варианте осуществления при приёме первой команды от пользователя детектор 22 состояния окружения начинает подготовку к смене полосы движения. В это время контроллер 23 дисплея начинает поддерживать включенным индикатор 6b указателей поворота, как показано на фиг.2А. Таким образом пользователь может распознать, что система начала подготовку к смене полосы движения, и может точно знать состояние транспортного средства-носителя 60. После этого, в случае, если пользователь или система проверяет состояние окружения транспортного средства-носителя 60 и определяет, что смена полосы движения разрешена, пользователь выдает вторую команду. При приёме второй команды контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Таким образом, контроллер 23 дисплея способен информировать пользователя о том, что в ближайшее время будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время будет выполнена смена полосы движения. Таким образом, перед тем, как транспортное средство-носитель 60 начнет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств чувствовать, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0098]
Кроме того, перед командой пользователя контроллер 23 дисплея может начать поддерживать включенным индикатор 6b указателей поворота, как показано на фиг.2А. Таким образом пользователь может распознать, что система начала подготовку к смене полосы движения, и может точно знать состояние транспортного средства-носителя 60. После этого, когда подготовка к смене полосы движения завершена, при приёме команды пользователя контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Таким образом контроллер 23 дисплея способен информировать пользователя о том, что в ближайшее время будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом, перед тем, как транспортное средство-носитель 60 начинает управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путём заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0099]
Кроме того, после команды пользователя контроллер 23 дисплея может начать поддерживать включенным индикатор 6b указателей поворота, как показано на фиг.2А. Таким образом пользователь может распознавать, что команда пользователя отражена, и может точно знать состояние транспортного средства-носителя 60. После этого, когда подготовка к смене полосы движения завершена, контроллер 23 дисплея способен изменять состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание без приёма команды от пользователя. Кроме того, контроллер 23 дисплея способен изменять состояние освещения сигналов 8c, 8d поворота с выключенного состояния на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Таким образом контроллер 23 дисплея способен информировать пользователя о том, что в ближайшее время будет выполнена смена полосы движения. Кроме того, путем мигания сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения в заданное время. Таким образом, перед тем, как транспортное средство-носитель 60 начнет управление сменой полосы движения, контроллер 23 дисплея способен информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путем заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0100]
Кроме того, устройство 100 управления отображением включает сигнал 8 поворота после включения индикатора указателей поворота, но перед тем, как транспортное средство-носитель 60 начнет управление сменой полосы движения или управление поворотом вправо/влево. Таким образом устройство 100 управления отображением способно информировать пользователя о том, что подготовка к смене полосы движения или повороту вправо/влево завершена, и вскоре будет выполнена смена полосы движения. Кроме того, посредством мигания сигнала поворота устройство 100 управления отображением способно информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом, перед тем, как транспортное средство-носитель 60 начнет управление сменой полосы движения, устройство 100 управления отображением способно информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путем заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0101]
Кроме того, режим отображения индикатора указателей поворота отличается до и после включения сигнала 8 поворота. Например, как показано на фиг. 2A, когда детектор 22 состояния окружения готовит смену полосы движения, контроллер 23 дисплея поддерживает включенным индикатор 6b указателей поворота, но не включает сигналы 8c, 8d поворота. После этого, как показано на фиг. 2B, когда подготовка к смене полосы движения завершена, контроллер 23 дисплея изменяет состояние освещения индикатора 6b указателей поворота с непрерывного включения на мигание. Кроме того, контроллер 23 дисплея изменяет состояние освещения сигналов 8c, 8d поворота с выключения на мигание в соответствии с состоянием освещения индикатора 6b указателей поворота. Другими словами, режим, в котором отображается индикатор 6b указателей поворота, – это непрерывное включение до включения сигналов поворота и мигание после включения сигналов поворота. Как описано выше, режим, в котором отображается индикатор 6b указателей поворота, отличается до и после включения сигналов 8c, 8d поворота. Поскольку контроллер 23 дисплея поддерживает включенным индикатор 6b указателей поворота перед включением сигналов 8c, 8d поворота, контроллер 23 дисплея способен информировать пользователя о том, что началась подготовка к смене полосы движения. Таким образом пользователь может распознавать, что команда пользователя отражена, и может точно знать состояние транспортного средства-носителя 60. Кроме того, путем мигания индикатора 6b указателей поворота и сигналов 8c, 8d поворота контроллер 23 дисплея способен информировать пользователя о том, что подготовка к смене полосы движения завершена и скоро будет произведена смена полосы движения.
[0102]
Кроме того, после того, как устройство 100 управления отображением включает сигнал 8 поворота, устройство 200 управления транспортным средством выполняет управление сменой полосы движения или управление поворотом вправо/влево в заданное время. Другими словами, за заданное время до того, как устройство 200 управления транспортным средством выполняет управление сменой полосы движения или управление поворотом вправо/влево, устройство 100 управления отображением включает сигнал 8 поворота. Таким образом устройство 100 управления отображением способно информировать другие транспортные средства в окружении транспортного средства-носителя 60 о том, что в заданное время транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом, перед тем, как транспортное средство-носитель 60 начнет управление сменой полосы движения, устройство 100 управления отображением способно информировать пользователей других транспортных средств о том, что транспортное средство-носитель 60 собирается выполнить смену полосы движения. Таким образом другие транспортные средства могут препятствовать поведению, которое вызывает дискомфорт у пользователей других транспортных средств, например путем заблаговременного увеличения расстояния между транспортными средствами путем замедления.
[0103]
Кроме того, устройство 100 управления отображением включает в себя стоп-сигналы 9a, 9b, установленные на транспортном средстве–носителе 60. Кроме того, изображение 70 окружения, проиллюстрированное на фиг. 4A, отображает виртуальные стоп-сигналы 9a', 9b'. Следует отметить, что виртуальные стоп-сигналы 9a', 9b' отличаются от фактических стоп-сигналов 9а, 9b. Устройство 100 управления отображением делает момент времени начала включения стоп-сигналов 9a, 9b и момент времени начала включения виртуальных стоп-сигналов 9a', 9b' отличными друг от друга. Таким образом, прежде чем система приведёт в действие тормоз, устройство 100 управления отображением способно информировать пользователя о том, что будет приведён в действие тормоз. Это снижает вероятность того, что пользователь будет испытывать дискомфорт, даже если тормоз на самом деле приведён в действие. Другими словами, устройство 100 управления отображением способно снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет в транспортном средстве.
[0104]
Кроме того, устройство 100 управления отображением управляет сигналами 8c, 8d поворота, индикатором 6b указателей поворота и дисплеем 7 таким образом, чтобы сделать момент времени начала включения сигналов 8c, 8d поворота, момент времени начала включения индикатора 6b и момент времени начала включения дисплея для отображения подготовки на дисплее 7 отличными друг от друга. Это позволяет пользователю знать, в каком состоянии находится освещение сигналов 8c, 8d поворота, собираются ли сигналы 8c, 8d поворота включиться с этого момента, и будет ли управление транспортным средством осуществляться с этого момента. Таким образом пользователь может точно знать состояние транспортного средства–носителя 60. Соответственно, устройство 100 управления отображением способно снизить вероятность того, что пользователь будет испытывать дискомфорт, когда пользователь едет в транспортном средстве.
[0105]
(Другие варианты осуществления)
Хотя вышеприведённое описание было приведено для варианта осуществления настоящего изобретения, заявления или чертежи, составляющие часть настоящего описания, не следует истолковывать как ограничивающие настоящее изобретение. Различные альтернативные варианты осуществления, примеры и технологии работы будут очевидны специалистам в данной области техники из данного описания.
[0106]
Например, пользователь или система могут прекратить смену полосы движения или поворот вправо/влево. Момент времени прекращения конкретно не ограничен. Например, пользователь или система могут прекратить смену полосы движения или поворот вправо/влево после завершения подготовки к смене полосы движения или повороту вправо/влево. В случае, если подготовка к смене полосы движения или повороту вправо/влево уже завершена, как индикатор указателей поворота, так и сигнал 8 поворота мигают, как показано на этапах S113 и S115 на фиг. 8A. В этом случае, если пользователь или система прекращает смену полосы движения или поворот вправо/влево, контроллер 23 дисплея выключает как индикатор указателей поворота, так и сигнал 8 поворота. После этого контроллер 23 дисплея запрещает включение индикатора указателей поворота и сигнал 8 поворота в течение заданного времени.
[0107]
Следует отметить, что пользователь или система могут прекратить смену полосы движения или поворот вправо/влево до завершения подготовки к смене полосы движения или поворота вправо/влево. В случае, если подготовка к смене полосы движения или к повороту вправо/влево еще не завершена, индикатор указателей поворота включен, и сигнал 8 поворота выключен, как показано на этапах S109 и S111 на фиг. 8A. В этом случае, если пользователь или система прекращает смену полосы движения или поворот вправо/влево, контроллер 23 дисплея выключает индикатор указателей поворота. После этого контроллер 23 дисплея запрещает включение индикатора указателей поворота и сигнала 8 поворота от в течение заданного времени.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0108]
1 детектор объектов
2 детектор положения транспортного средства-носителя
3 блок получения карты
4 группа датчиков
5 переключатель указателей поворота
6 индикатор
6a, 6b индикатор указателей поворота
7 дисплей
8, 8a, 8b, 8c, 8d сигнал поворота
8a', 8b', 8c', 8d' виртуальный сигнал поворота
9, 9а, 9b стоп–сигнал
9a', 9b' виртуальный стоп-сигнал
10, 10а, 10b фара
10a', 10b' виртуальная фара
20 контроллер
21 генератор изображения окружения
22 детектор состояния окружения
23 контроллер дисплея
30 детектор состояния транспортного средства-носителя
31 ЭБУ управления транспортным средством
32 исполнительный механизм
100 устройство управления отображением
200 устройство управления транспортным средством

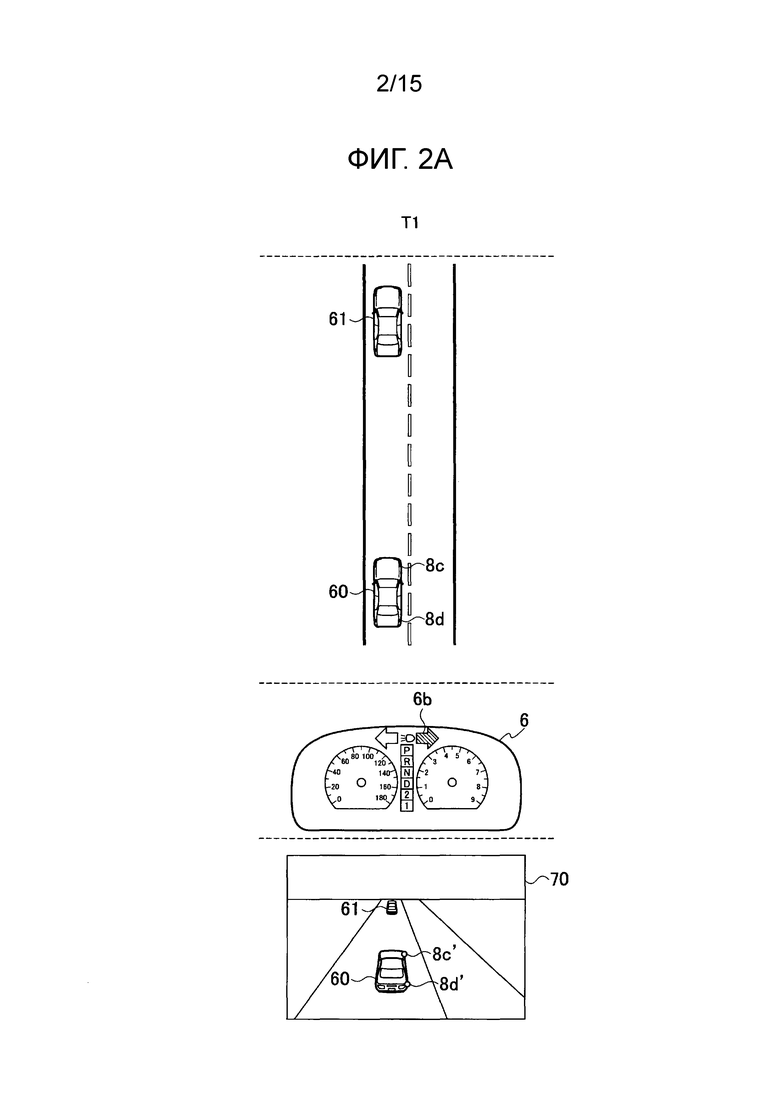
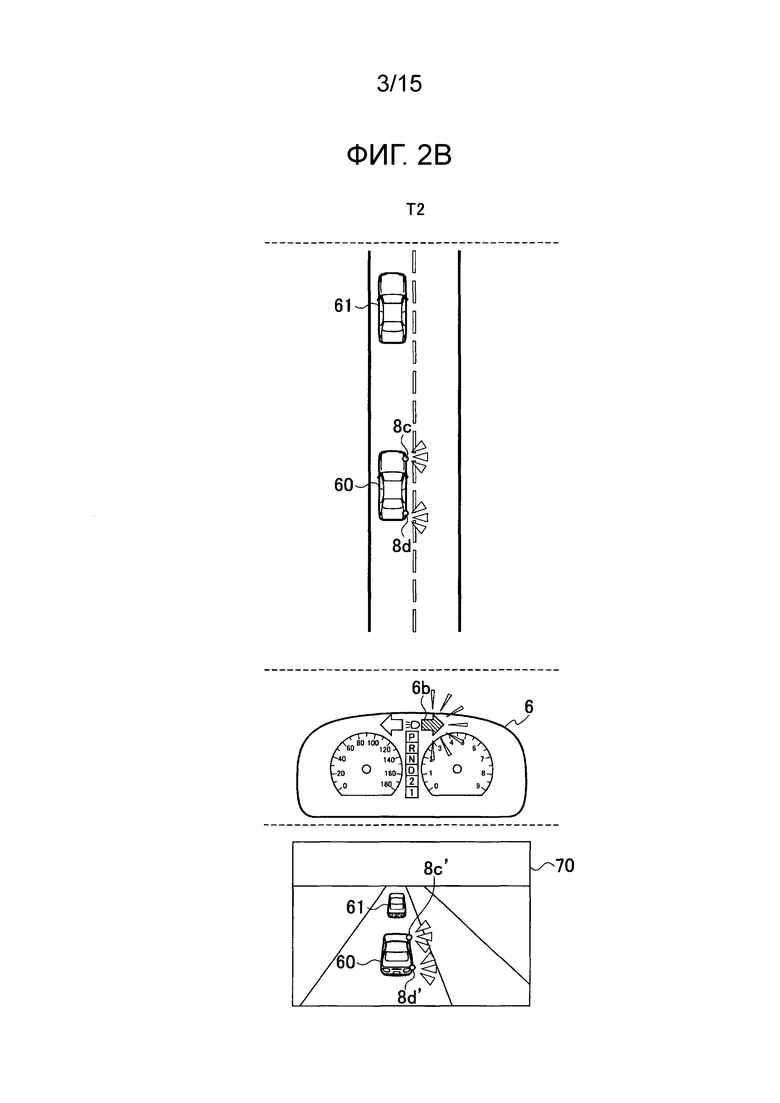
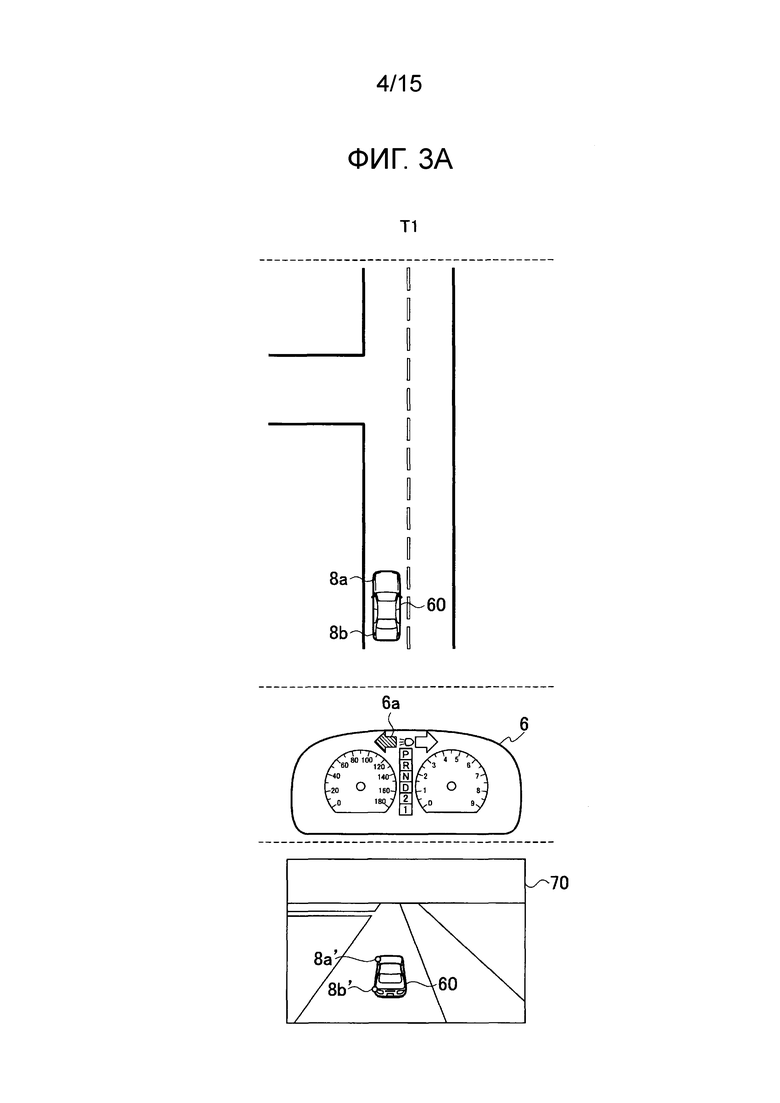
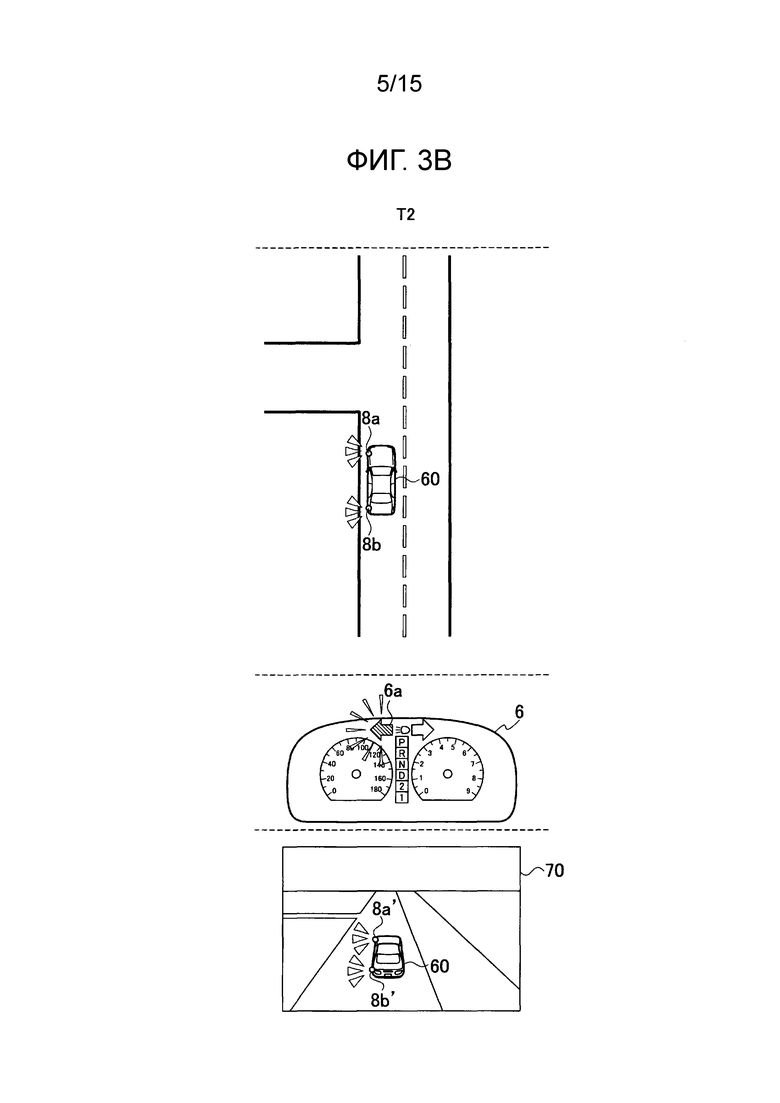
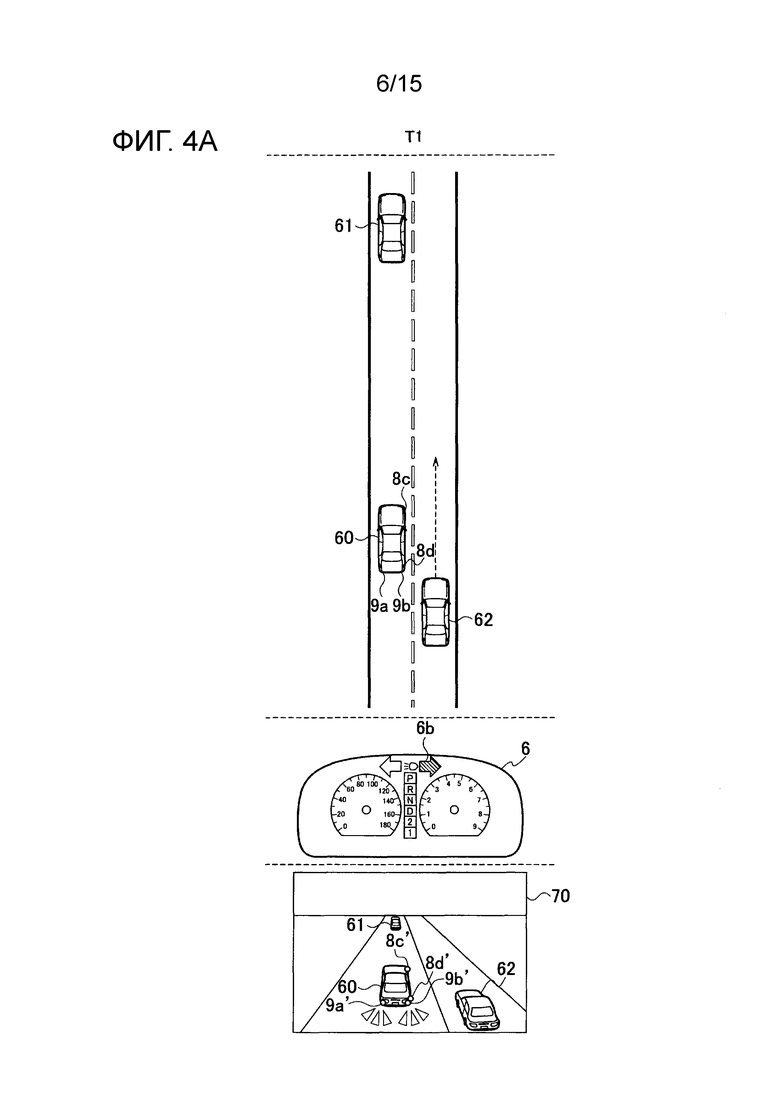
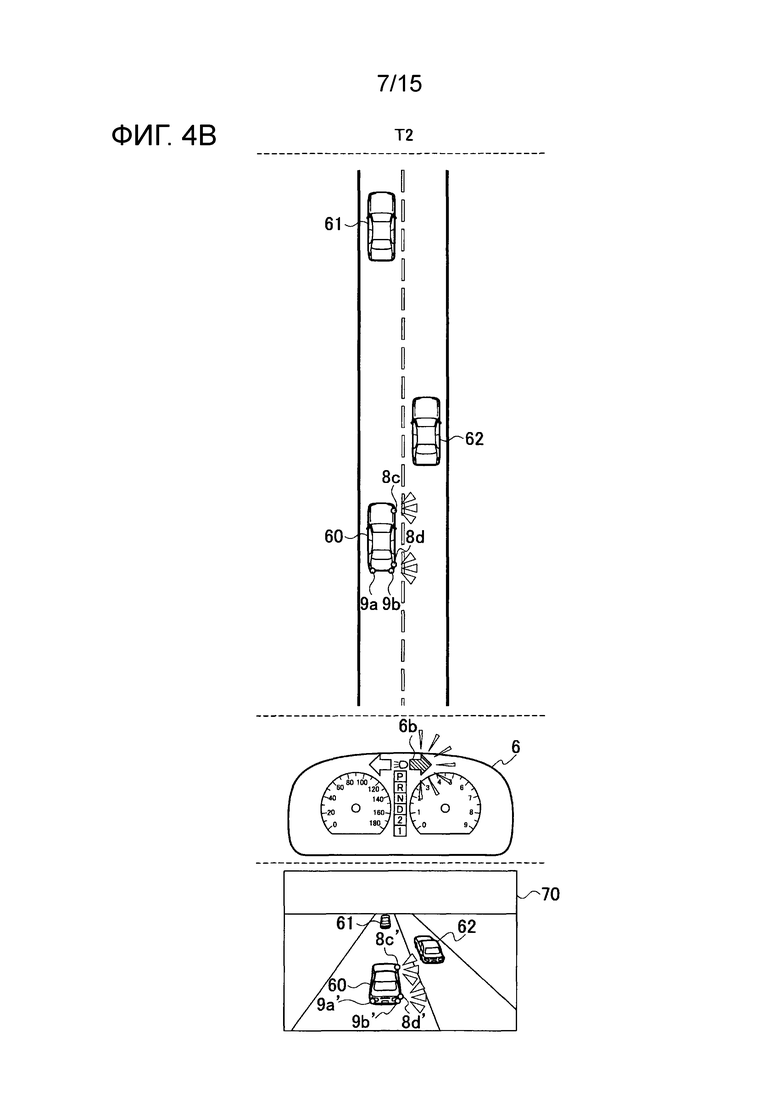
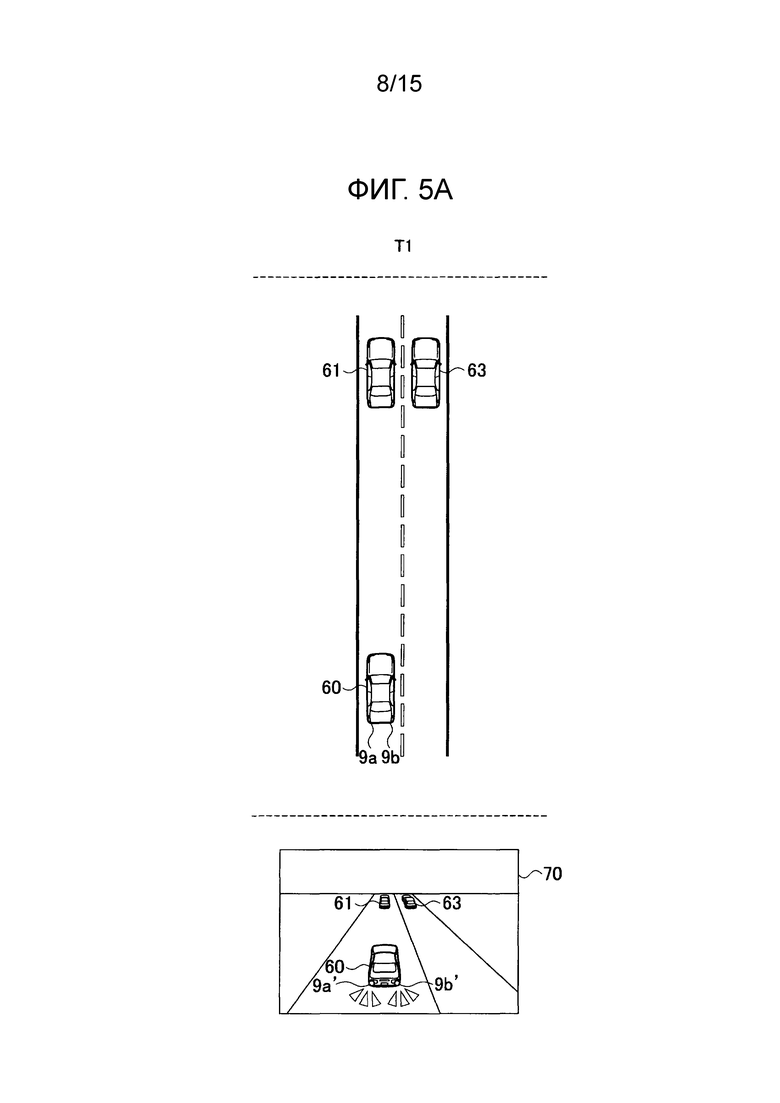
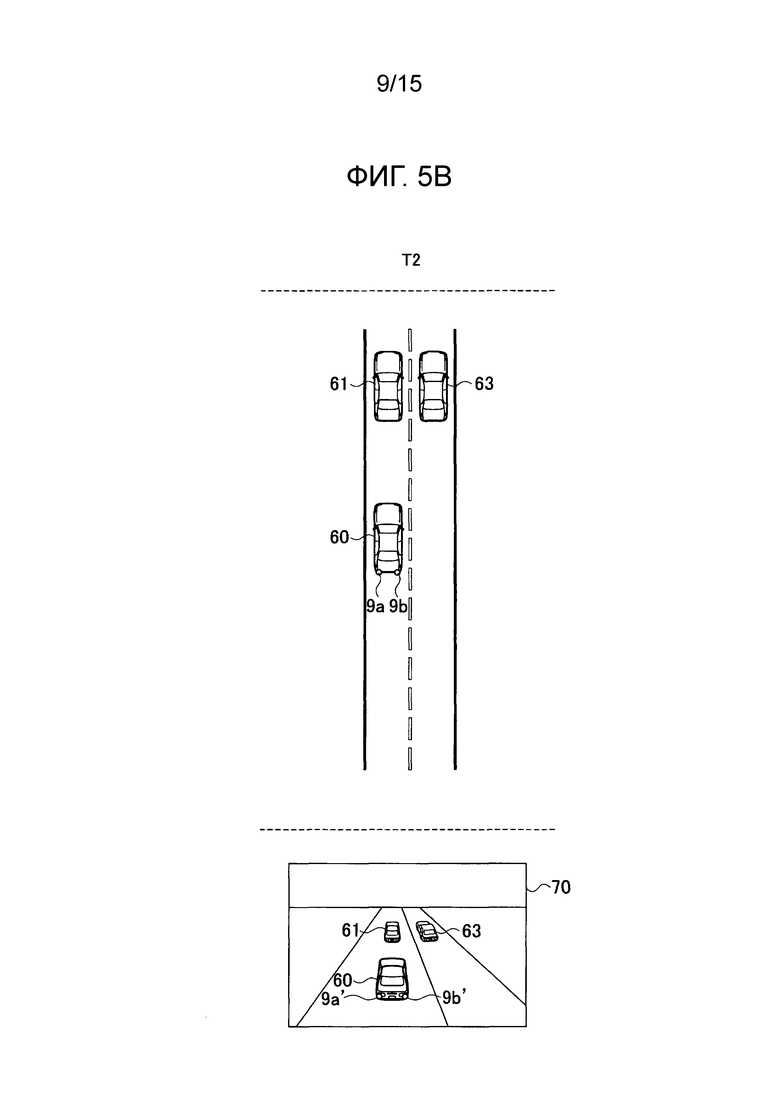


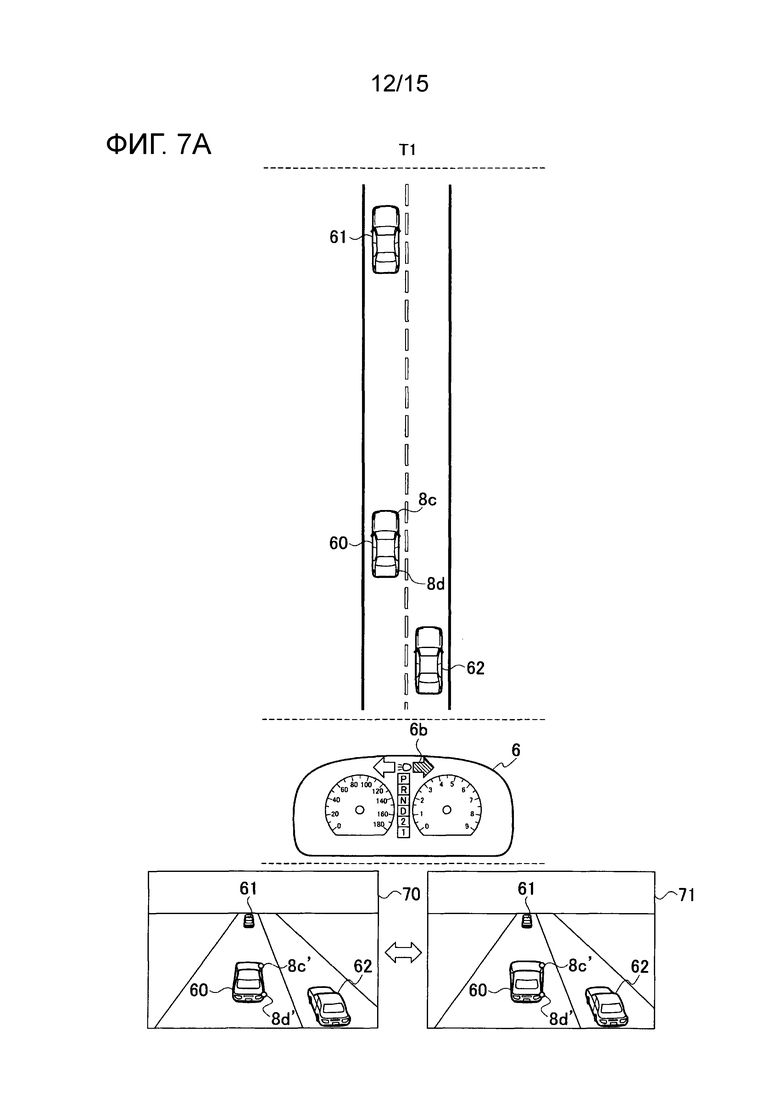

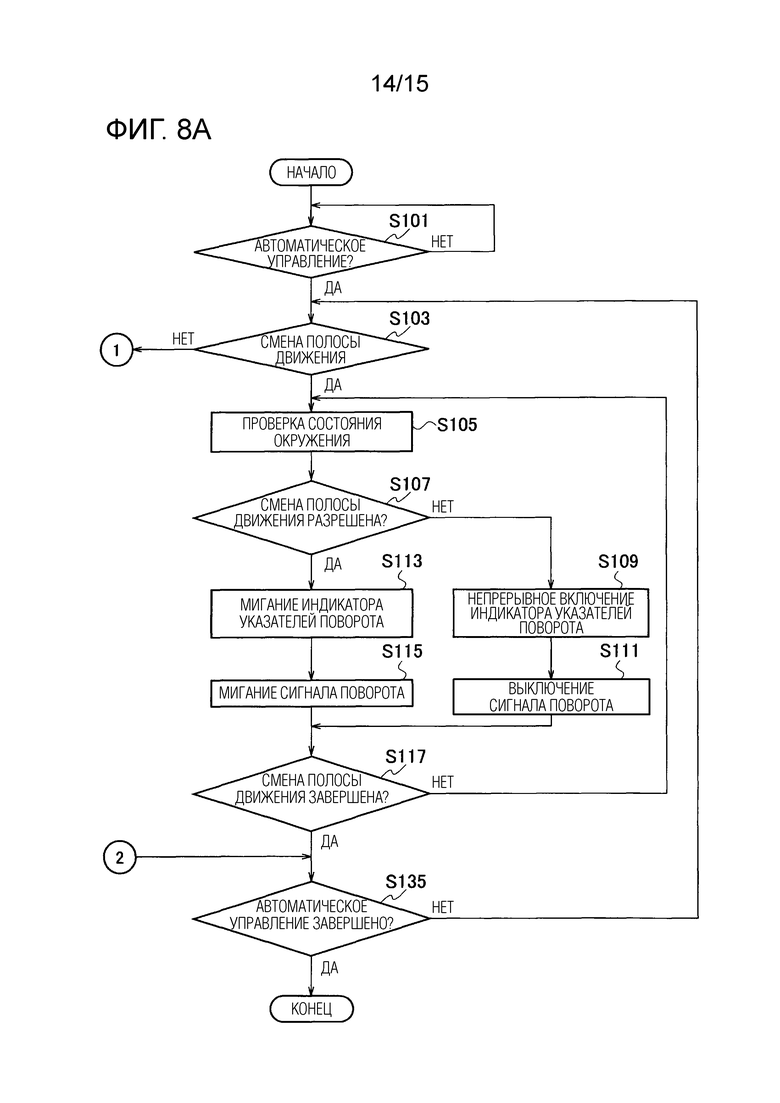
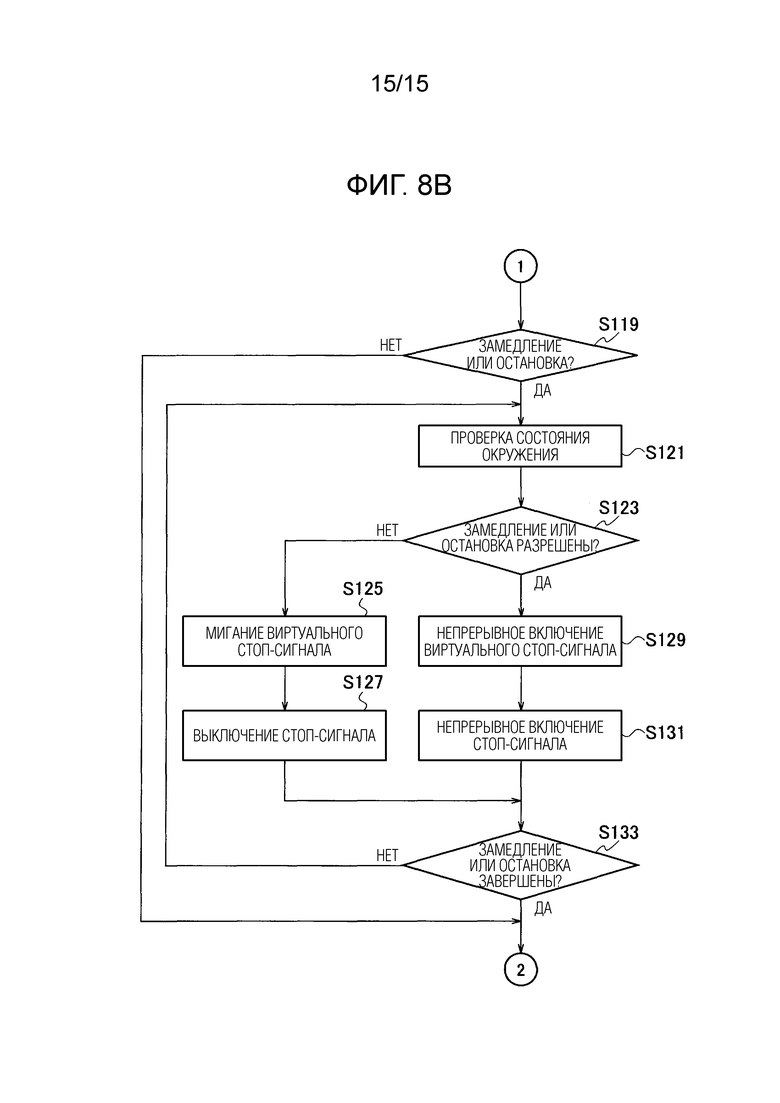
Изобретение относится к способу и устройству управления отображением. Устройство управления отображением включает в себя сигнал поворота, установленный на транспортном средстве, и индикатор для отображения состояния освещения сигнала поворота для пользователя транспортного средства. Устройство управления отображением управляет состоянием освещения сигнала поворота и состоянием освещения индикатора, при этом момент времени начала включения сигнала поворота и момент времени начала включения индикатора являются отличными друг от друга. Индикатор включается непрерывно до того, как сигнал поворота мигает, индикатор начинает непрерывно включаться в случае, если пользователь манипулирует переключателем указателей поворота, и индикатор изменяется с непрерывного включения на мигание, когда сигнал поворота мигает. Достигается повышение безопасности управления транспортным средством. 2 н. и 6 з.п. ф-лы. 15 ил. 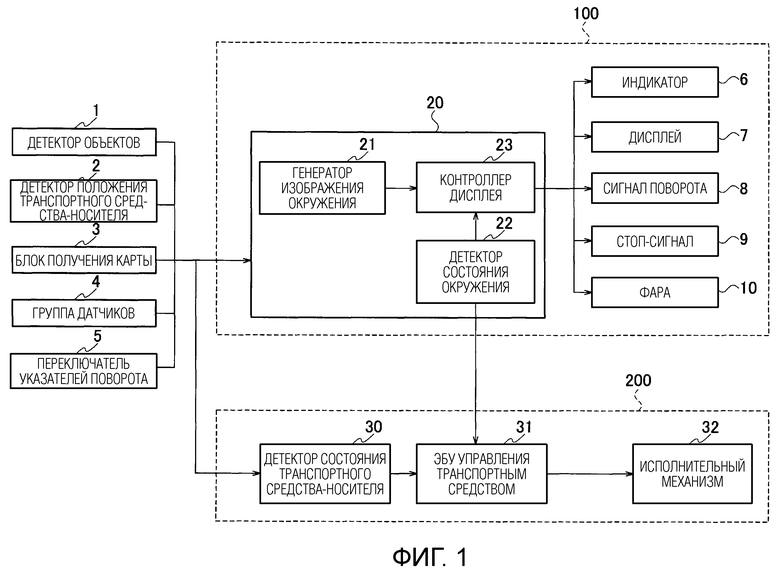
1. Способ управления отображением для устройства управления отображением, причем устройство управления отображением включает в себя
сигнал поворота, установленный на транспортном средстве, и
индикатор для отображения состояния освещения сигнала поворота для пользователя транспортного средства,
причем устройство управления отображением управляет состоянием освещения сигнала поворота и состоянием освещения индикатора, при этом
момент времени начала включения сигнала поворота и момент времени начала включения индикатора являются отличными друг от друга,
индикатор включается непрерывно до того, как сигнал поворота мигает,
индикатор начинает непрерывно включаться в случае, если пользователь манипулирует переключателем указателей поворота, и
индикатор изменяется с непрерывного включения на мигание, когда сигнал поворота мигает.
2. Способ управления отображением по п. 1, в котором
устройство управления отображением включает в себя дисплей для отображения состояния управления для управления транспортным средством, которое должно быть выполнено на основании маршрута движения, вычисленного с учетом состояния окружения вокруг транспортного средства,
момент времени начала включения индикатора и момент времени начала включения состояния управления для управления транспортного средства для отображения на дисплее установлены перед моментом времени начала включения сигнала поворота, и
управление транспортным средством включает в себя по меньшей мере одно из автоматического управления сменой полосы движения, автоматического управления поворотом влево/вправо, и автоматического управления тормозом.
3. Способ управления отображением по п. 1 или 2, в котором после того, как включается индикатор, но до того, как транспортное средство начинает управление сменой полосы движения или управление поворотом влево/вправо, сигнал поворота включается в случае, если система для управления автоматическим управлением определяет, что смена полосы движения или поворот вправо/влево разрешены.
4. Способ управления отображением по п. 1 или 2, в котором режим отображения индикатора отличается до и после включения сигнала поворота.
5. Способ управления отображением по п. 3, в котором сигнал поворота включается за заданное время до того, как транспортное средство выполнит управление сменой полосы движения или управление поворотом влево/вправо.
6. Способ управления отображением по п. 1 или 2, в котором
устройство управления отображением дополнительно включает в себя стоп-сигнал, установленный на транспортном средстве, и
момент времени начала включения стоп-сигнала и момент времени начала включения индикатора торможения для отображения состояния освещения стоп-сигнала являются отличными друг от друга.
7. Способ управления отображением по п. 1 или 2, в котором после того, как индикатор начинает быть непрерывно включенным, индикатор выключается в случае, если система для управления автоматическим управлением определяет, что смена полосы движения или поворот вправо/влево не разрешены.
8. Устройство управления отображением, содержащее:
сигнал поворота, установленный на транспортном средстве;
индикатор для отображения состояния освещения сигнала поворота для пользователя транспортного средства; и
контроллер для управления состоянием освещения сигнала поворота и состоянием освещения индикатора, при этом
контроллер
делает момент времени начала включения сигнала поворота и момент времени начала включения индикатора отличными друг от друга,
поддерживает индикатор включенным перед миганием сигнала поворота,
начинает поддерживать индикатор включенным в случае, если пользователь манипулирует переключателем указателей поворота, и
изменяет индикатор с непрерывного включения на мигание, когда сигнал поворота мигает.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СИСТЕМА, АССИСТИРУЮЩАЯ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО С УКАЗАННОЙ СИСТЕМОЙ И СПОСОБ ОКАЗАНИЯ ПОДДЕРЖКИ ВОДИТЕЛЮ ПРИ УПРАВЛЕНИИ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2555248C2 |

