Изобретение относится к движителям для надводного и подводного самоходного транспорта, а также может применяться в потокообразователях, вентиляторах, авиационной технике.
У судового винта наряду с достоинствами имеются и серьезные недостатки, например, для достижения максимального КПД необходимо согласовывать диаметр винта, шаг, форму, профиль и количество лопастей, частоту вращения и мощность силовой установки, осадку и обводы корпуса и т.д., что на практике соблюсти довольно трудно. Поэтому на малых судах КПД реальных винтов может составлять около 45%. К тому же плоскость вращения судового винта расположена перпендикулярно к направлению движения, поэтому винт обладает заметным собственным сопротивлением движению. В этом плане плавниковый движитель обладает повышенными достоинствами по созданию тяги. Исследователи отмечают более высокую эффективность машущего движителя.
Известен «Корабль с плавниковым движителем» (Патент №RU 2360831 С2 от 10.07.2009 г., МПК В63Н 1/36, опубликован 10.07.2009), в котором движителем корабля является плавник, состоящий из последовательности гибких полосовых поверхностей с жесткими ребрами, выполняющими перемещения в цепной сцепке, задающей углы наклона жестких ребер по касательной к бегущей синусоиде, что в разные моменты времени образует геометрически сложные седловые поверхности со строго заданными скоростями деформации поверхности машущего крыла, при этом для приведения в движение цепной линии плавника строго по синусоидальному закону, применимы различные механизмы на основе коленчатого вала, гибкой шарнирной плети или линейных шаговых электродвигателей. Предполагается, что плавниковый движитель обеспечит требуемую тягу для поддержания высокой скорости хода и повышенную проходимость в сложных и штормовых условиях плавания.
Недостатком этого решения является сложность конструкции движителя, требующая наличия большого количества шарниров и сенсоров для улавливания волны, т.к. бегущая волна способна не только уменьшать сопротивление, но и увеличивать его, поэтому следует иметь довольно сложную конструкцию, чтобы подстроиться под параметры волны с целью уменьшить сопротивление. К тому же, перемещения плавника выполняются в возвратно-поступательном режиме, что влечет за собой большие инерционные нагрузки и импульсные реактивные воздействия на корпус судна.
Известен «Способ движения несущей поверхности в текучей среде и устройство для его осуществления» (RU 2147545 С1; МПК7 В64С 33/00, F03D 3/06; Опубликовано: 20.04.2000), выбранный в качестве прототипа, который характеризуется тем, что и "маховое", и "угловое" движение несущей поверхности осуществляют равномерно на протяжении всего цикла вращения. Несущую поверхность с постоянной угловой скоростью равномерно вращают вокруг собственной оси "углового" вращения. Ось "углового" вращения поворачивают с постоянной угловой скоростью вокруг оси "махового" вращения, неподвижной в системе отсчета. Отношение величин угловых скоростей "углового" и "махового" вращения равно 1:2. Угол между векторами угловых скоростей составляет 90-180°. При первом варианте реализации устройства для осуществления этого способа каждая лопасть гребного колеса имеет возможность вращения вокруг собственной оси, параллельной оси колеса, и снабжена звеном-сателлитом планетарного механизма, а при втором варианте каждая лопасть гребного винта имеет такую возможность вращения вокруг собственной оси, перпендикулярной оси винта, и звену-сателлиту планетарного механизма. Планетарный механизм обеспечивает соответствие одному обороту лопасти вокруг оси колеса или гребного винта пол-оборота лопасти вокруг собственной оси. У гребного колеса лопасть вокруг собственной оси вращается в противоположном направлении. Предполагается, что технический результат от реализации изобретения позволит повысить эксплуатационные качества устройства, работающего по указанному способу.
Анализ описанного способа показывает, что вращение лопасти в два раза медленнее ступицы и в противоположную сторону создает условия для уменьшения эффективной рабочей площади лопасти за один оборот за счет циклического изменения ее угла атаки, значит при вращении лопасть, даже при ее расположении параллельно оси вращения колеса (при угле наклона α равным нулю), не сможет обеспечить эффективность по созданию тяги более 50%. Наклон лопасти к оси вращения колеса предусмотрен в пределах угла α от 0° до 90°, что соответствует, согласно изобретению, «углу между векторами угловых скоростей от 90° до 180°», т.е. при увеличении угла наклона лопастей к оси вращения колеса, выталкивание среды лопастью будет направлено еще и в осевом направлении движителя, что дополнительно снизит его эффективность в плоскости вращения колеса и не обеспечит высокую эффективность в осевой плоскости, и с увеличением угла наклона эффективность будет снижаться как в осевом направлении, так и в перпендикулярном ему, потому что эффективная рабочая поверхность лопастей при контакте со средой будет меняться от нуля до максимума за каждые пол-оборота колеса, и контакт со средой к тому же будет происходить под углом наклона лопасти, что приведет к скольжению лопасти, скосу потока, его рассеиванию вокруг движителя и потере общей эффективности. В данном изобретении описана возможность установки лопастей под углом наклона к оси вращения колеса в интервале между 0° и 90°, но механизм, позволяющий иметь эти углы наклона, не раскрыт.
Цель изобретения состоит в увеличении эффективности машущего движителя.
Сущность изобретения состоит в том, что:
I. Способ образования махов установленными на ступице винта лопастями, сочетающий два вращения лопастей: а) вращательное движение лопастей вокруг оси вращения ступицы; б) вращение лопастей вокруг своих продольных осей в направлении, противоположном вращению ступицы, при этом винт оборудуют, по крайней мере, одной лопастью, продольную ось каждой лопасти устанавливают по отношению к оси вращения ступицы с наклоном от 0° до 90° в одной плоскости или со скрещиванием в параллельных или скрещивающихся плоскостях с углами скрещивания от 0° до 90°, вращение лопастей осуществляют со скоростью, равной скорости вращения ступицы, но в противоположную сторону относительно направления вращения ступицы, при необходимости винт оборудуют механизмом прерывистого движения, обеспечивающим за один оборот ступицы совершение n-го количества доворотов лопасти через каждые 360/n° поворота центральной шестерни или шестерни привода лопасти на установленный угол, предпочтительно 360/n°, по ходу или против хода вращения ступицы.
II. Винт с установленными на ступице лопастями, сочетающий два вращения лопастей: а) вращательное движение лопастей вокруг оси вращения ступицы; б) вращение лопастей вокруг своих продольных осей в направлении, противоположном вращению ступицы, при этом винт оборудован, по крайней мере, одной лопастью, продольные оси каждой лопасти установлены по отношению к оси вращения ступицы с наклоном от 0° до 90° в одной плоскости или со скрещиванием в параллельных или скрещивающихся плоскостях с углами скрещивания от 0° до 90°, угловые скорости вращения каждой лопасти вокруг своих продольных осей равны скорости вращения ступицы, но вращаются в противоположном направлении относительно направления вращения ступицы, винт может оборудоваться дополнительными механизмами, обеспечивающими регулируемый наклон лопастей относительно оси вращения ступицы и/или прерывистое движение лопастей и/или направляющими устройствами для потоков среды; в качестве механизма прерывистого движения использован механизм мальтийского креста с n-м количеством пазов, посредством которого за один оборот ступицы совершается n-е количество доворотов лопасти через каждые 360/n° на угол 360/n° по ходу или против хода вращения ступицы; в качестве механизма вращения лопастей использован планетарный механизм Фергюссона; лопасти выполнены в плоскости продольного сечения в виде, преимущественно, осесимметричных прямоугольных, округлых или трапецеидальных фигур с линейными и/или округленными концами; лопасти выполнены в плоскости поперечного сечения в виде осесимметричных и/или пропорциональных фигур с линейными или округленными концами, плоским или пространственным, например с профилем двояковыпуклым сегментным, ледокольным, авиационным несимметричным или симметричным, угловым, выпукло-вогнутым, сегментным плоско-выпуклым, клиновым, многореберным, Z- или S-образным и др; устройство изменения углов наклона лопастей выполнено посредством зубчатого механизма со сферическим зацеплением; механизм удержания сферических шестерен в зацеплении представляет собой подвижный фигурный рычаг-водило, установленный одной точкой в шарнире на вращающейся втулке с внутренней или тыльной стороны сферической шестерни в центре перемещения сферической промежуточной шестерни по дуге, а вторым концом также с тыльной стороны на шарнире вращающейся втулки, установленной в выбранной точке перемещения сферической промежуточной шестерни, причем фигурный рычаг-водило посредством шарнира соединен с водилом, удерживающим сателлит и шестерню вращения вала лопасти; механизм удержания сферических шестерен в зацеплении представляет собой дугообразную направляющую-водило, установленную с рабочей стороны сферических шестерен, вращающуюся на центральном вале и движущуюся вместе с поступательно движущейся промежуточной сферической шестерней вокруг центрального вала, при этом скользящий шарнир промежуточной шестерни, установленный на оси шестерни в точке, которая находится на траектории дуги направляющей, входит в зацепление с направляющей-водилом; плоская лопасть имеет серповидное продольное сечение; направляющее устройство выполнено в виде контрвинта и/или контрпропеллера и/или кольцевой насадки; направляющее устройство в виде контрпропеллера оборудовано фигурным выступом, направленным к ступице; направляющее устройство в виде контрпропеллера оборудовано, по крайней мере, одним обтекаемым ребром, либо взаимно перекрещивающимися или параллельными обтекаемыми ребрами в количестве более одного ребра; направляющее устройство выполнено в виде кольцевой вращающейся насадки, соединенной с концевыми участками лопастей или их валов вращения, оборудованных шарнирами, установленными в кронштейнах насадки; лопасти устанавливают с произвольным углом ориентации; в качестве механизма вращения лопастей использована зубчатая передача; в качестве механизма вращения лопастей использован привод с гибкой связью в виде цепи, ремня или каната; лопасти установлены на ступице с возможностью отклонения либо на шарнире, либо посредством собственной гибкости.
Сущность изобретения поясняется чертежами, на которых показаны:
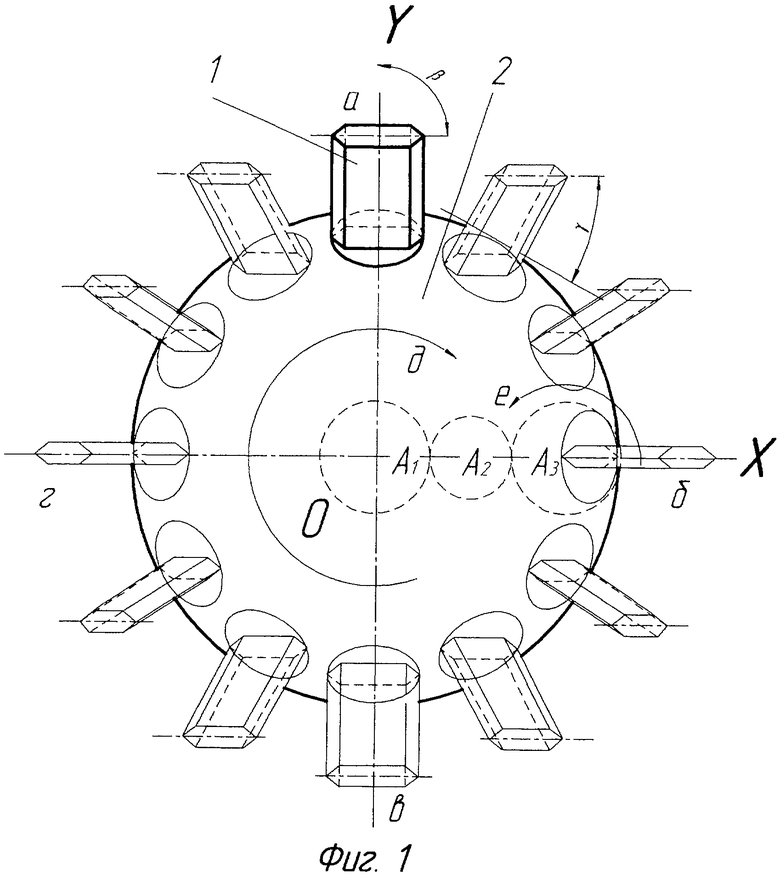
Фиг.1 - принцип махового движения.
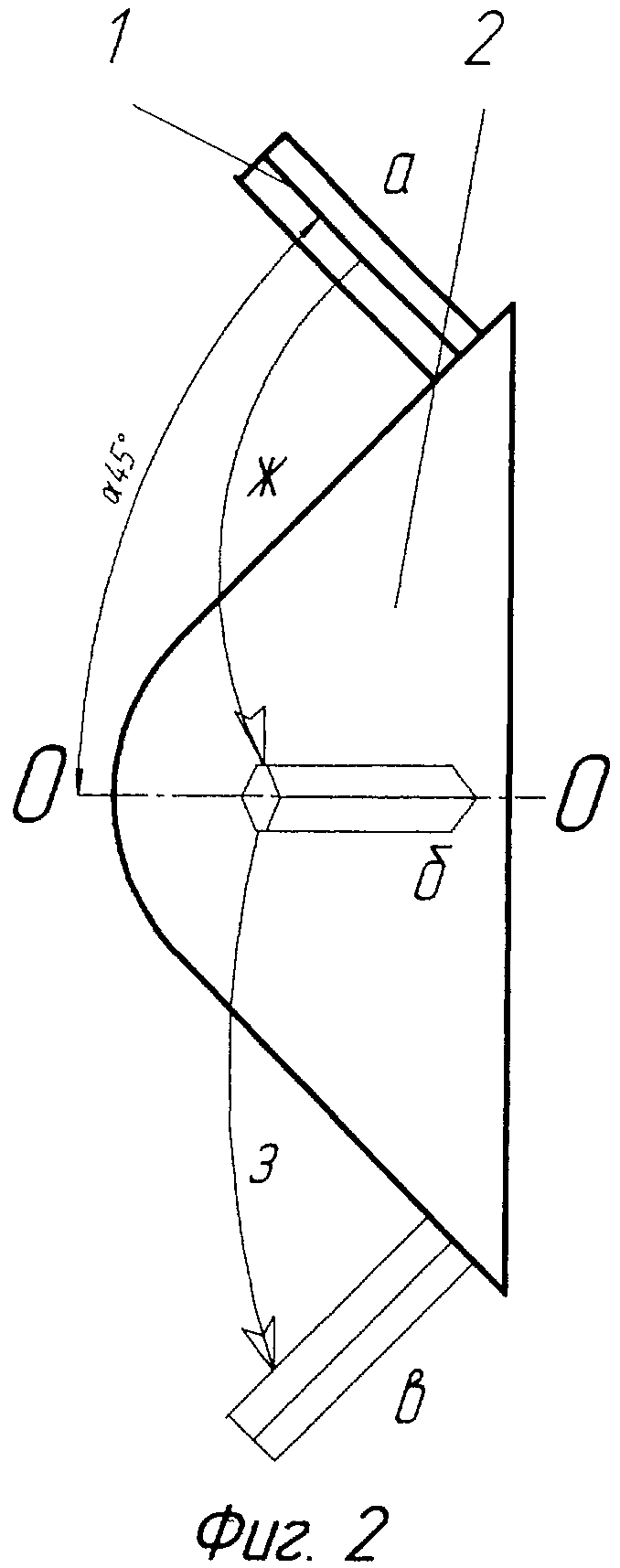
Фиг.2 - принцип осуществления машущего движения лопасти при 2 махах.
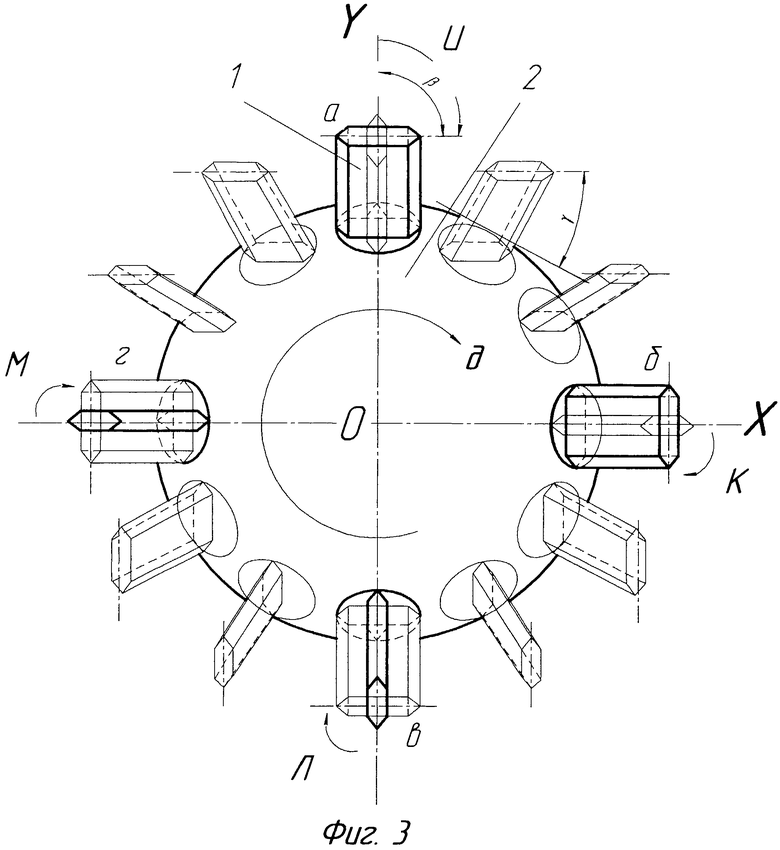
Фиг.3 - принцип осуществления машущего движения лопасти при 4 махах.
Фиг.4 - принципиальная кинематическая схема механического привода машущего винта с фиксированным наклоном лопастей.
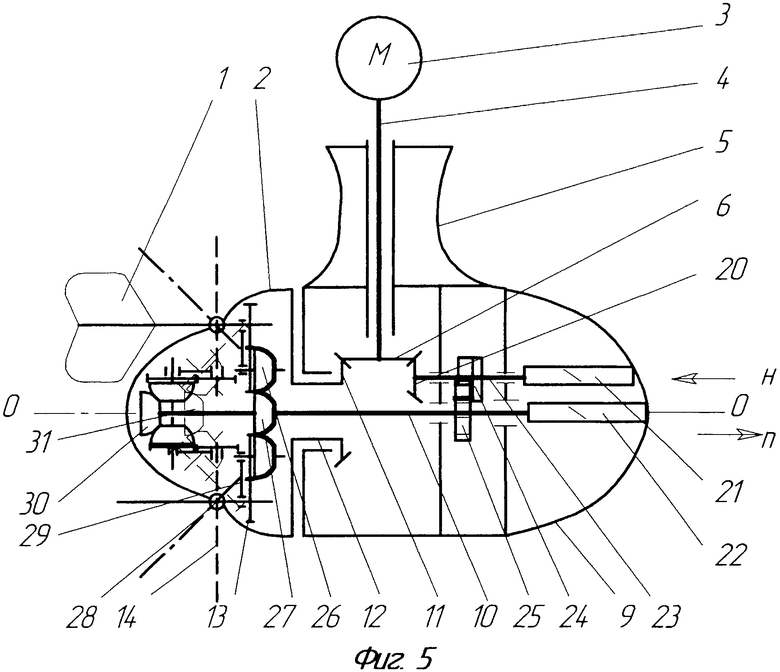
Фиг.5 - принципиальная кинематическая схема механического привода машущего винта с регулируемым наклоном лопастей и механизмом прерывистого движения.
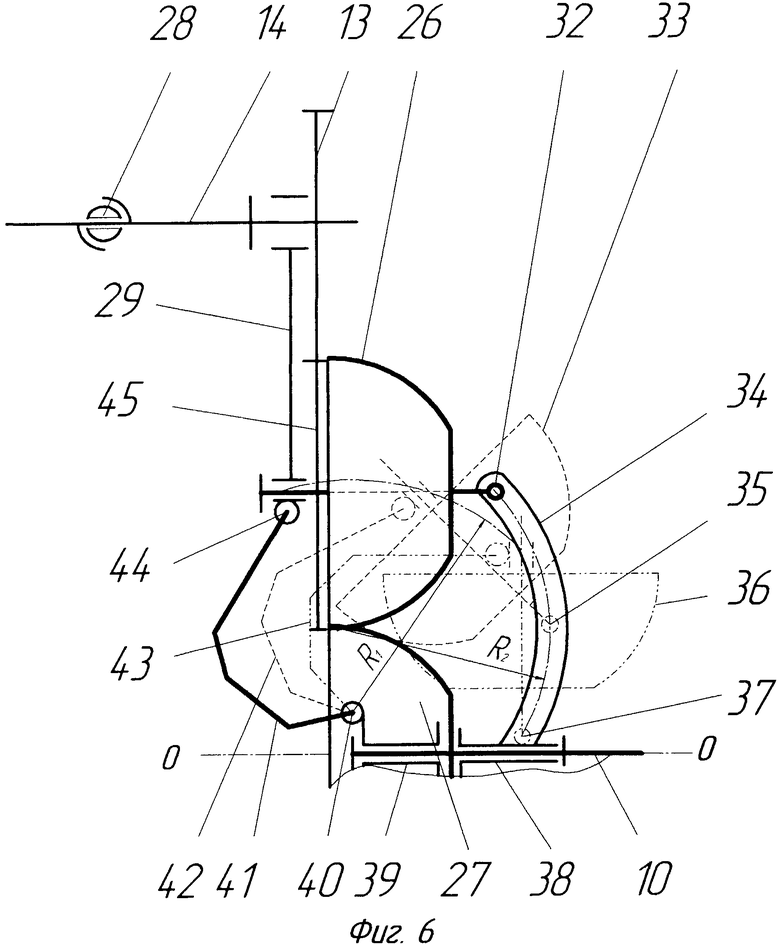
Фиг.6 - принципиальная кинематическая схема механизма отклонения лопастей.
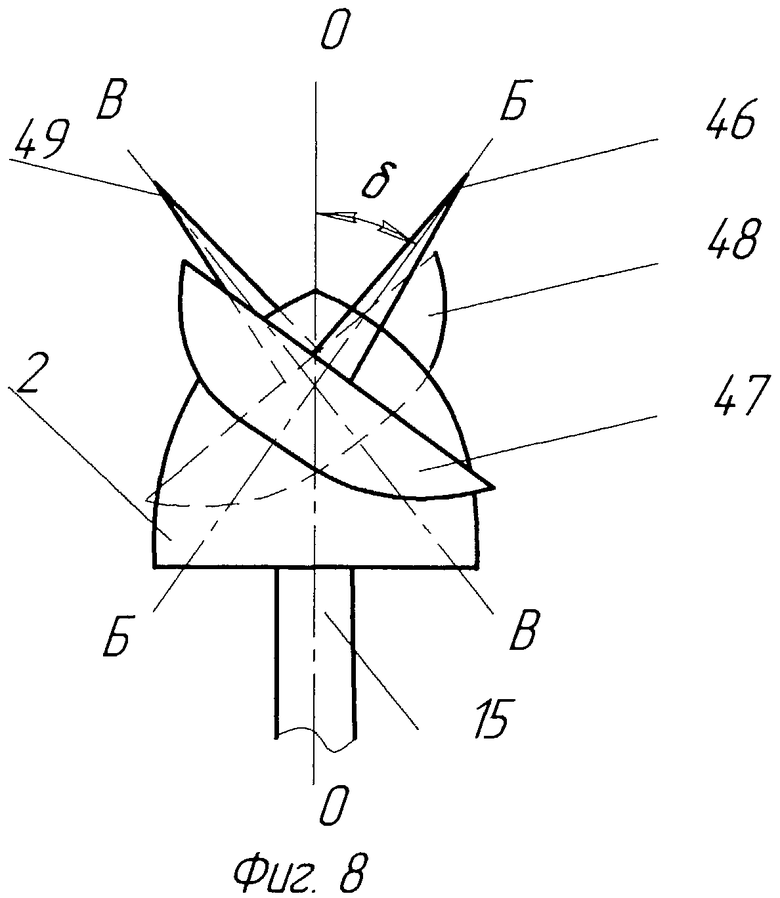
Фиг.7, Фиг.8 - схема работы механизма со скрещивающимися осями.
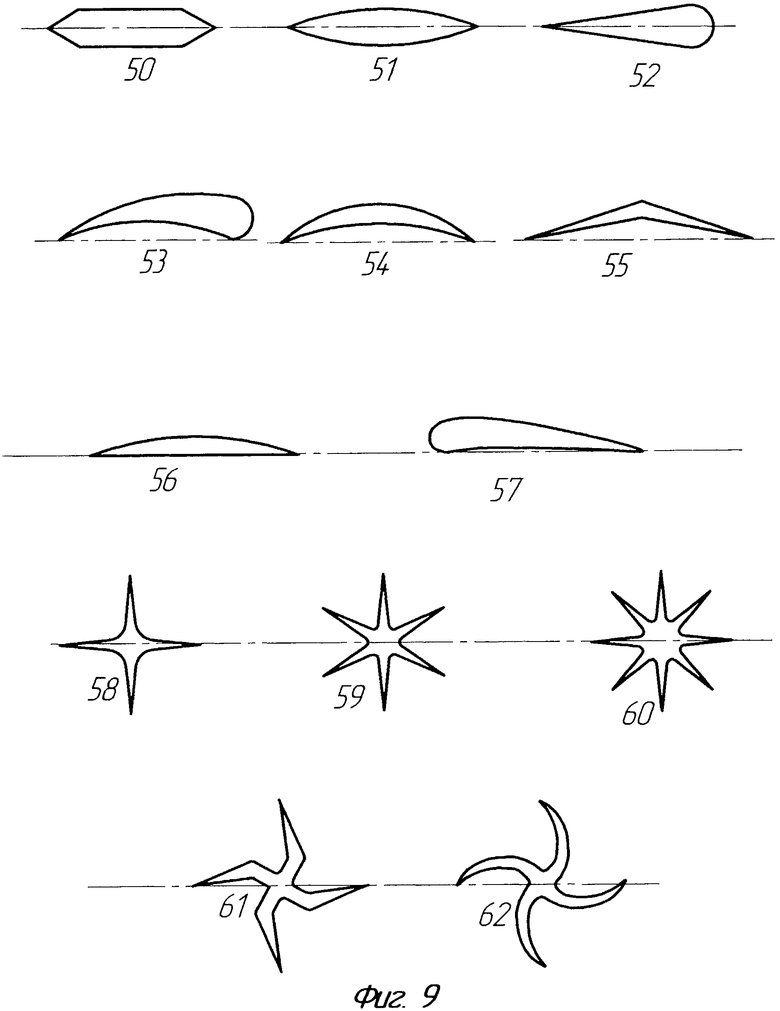
Фиг.9 - виды поперечных профилей лопастей.
Технический результат от реализации изобретения состоит в том, что винт позволяет обеспечить:
1. Увеличение контакта лопасти со средой на протяжении всего оборота винта.
2. Высокий КПД машущего винта.
3. Бесшумность надводного и подводного движения.
4. Уменьшение сопротивления машущего винта движению судна.
5. Уменьшение эффекта закручивания воды винтом.
6. Снижение проявлений кильватерного следа.
7. Расширение арсенала машущих движителей.
Тело гидробионтов в результате эволюции приспособления к окружающей среде способно улавливать малейшие колебания среды и максимально приспосабливаться к создаваемой телом волне, что позволяет им развивать большую скорость и при этом экономно расходовать энергию. Как известно, периодическое колебание плавника приводит к появлению как силы тяги, так и силы торможения, например, горизонтально ориентированный плавник или лопасть при махе вниз создает силу тяги только от верхнего положения до средины амплитуды маха - это сектор создания тяги. Механизм создания тяги таков: при начале маха вниз, т.е. начале гребка плавником, снизу плавника создается увеличенное давление, созданное плавником, от которого отталкивается плавник и толкает судно. Дальнейшее движение плавника ниже средины амплитуды маха уже является торможением - это сектор торможения, т.к. плавник становится поперек потока, но это движение необходимо для осуществления замаха, чтобы далее произвести гребок. Гидробионты проблему торможения решают путем гибкости плавника и тела, подстраиваясь под волну, при этом почти неизбежным следствием является рыскание передней части головы рыбы (рострума). Решение же задачи движения при помощи маховых движений техническими средствами требует очень сложного механизма, и полное копирование движения гидробионтов экономически нецелесообразно. Но в природе (за исключением некоторых микроорганизмов) отсутствует полноценное вращательное движение, а скорость возвратно-поступательных движений частей тела ограничивают инерционные силы, что, в свою очередь, ограничивает скорость движения. Предлагаемое техническое решение позволяет соединить вращательное движение ступицы винта и махи лопастей таким образом, который позволит, при применении механизма доворота, осуществлять маховые движения лопастей без замаха и без входа лопастей в сектор торможения, что эффективнее любых других способов махового движения.
Машущий винт содержит, в основном, следующие механизмы: силовую установку в виде теплового или электрического двигателя; трансмиссию; планетарный механизм Фергюссона, зубчатую или гибкую передачу; механизм доворота лопастей, содержащий механизм прерывистого движения, например, механизм мальтийского креста; механизм наклона лопастей; направляющее поток устройство в виде насадки, контрвинта и/или контрпропеллера; ступицу винта; лопасти; систему контроля и управления; электо-, гидро- или механические приводы; корпус; поворотное устройство и другие механизмы, необходимые для полноценной работы движителя.
Детально на иллюстрациях машущего винта обозначено:
1. лопасть; 2. ступица винта; 3. силовая установка; 4. силовой вал; 5. поворотная стойка; 6. коническая шестерня силового вала привода ступицы; 7. коническая шестерня привода центрального вала; 8. коническая шестерня силового вала привода центрального вала; 9. гондола; 10. центральный вал; 11. коническая шестерня привода ступицы; 12. полый вал ступицы винта; 13. шестерня вращения лопасти; 14. вал вращения лопастей; 15. кронштейн насадки; 16. центральная шестерня; 17. спрямляющее устройство; 18. насадка; 19. пилон насадки; 20. коническая шестерня привода водила мальтийского креста; 21. электромагнит или цилиндр отключения мальтийского механизма; 22. цилиндр механизма изменения угла наклона лопастей; 23. вал привода водила мальтийского креста; 24. водило мальтийского механизма; 25. крест мальтийского механизма; 26. сферический сателлит в положении отклонения лопастей под углом 0°; 27. центральная сферическая шестерня при отклонении лопастей под углом 0°; 28. сферический шарнир; 29. водило; 30. положение центральной шестерни при наклоне лопастей 90°; 31. положение центральной шестерни при наклоне лопастей 45°; 32. скользящий шарнир; 33. сферический сателлит при отклонении в 45°; 34. направляющая-водило; 35. положение скользящего шарнира при отклонении сферического сателлита под углом 45°; 36. сферический сателлит в положении отклонения лопастей под углом 90°; 37. скользящий шарнир в положении отклонения лопастей 90°; 38. вращающаяся втулка крепления направляющей-водила; 39. вращающаяся втулка крепления фигурного рычага-водила; 40. шарнир фигурного рычага-водила; 41. фигурный рычаг-водило; 42,43. положения фигурного рычага-водила при отклонении сферических сателлитов; 44. вращающаяся втулка водила с шарниром крепления фигурного рычага-водила; 45. сателлит прямой; 46. Гребковая лопасть верхняя; 47. Приводная лопасть верхняя; 48. Приводная лопасть нижняя; 49. Гребковая лопасть нижняя; Профили лопастей: 50. Ледокольный профиль; 51. Двояковыпуклый сегментный; 52. Авиационный симметричный; 53. Авиационный несимметричный; 54. Выпукло-вогнутый; 55. Угловой; 56. Плоско-выгнутый; 57. Клиновой; 58. Крестовый; 59. Шестиреберный; 60. Многореберный; 61. Z- образный; 62. S-образный.
О - центр вращения ступицы. O-O - ось вращения ступицы. В-В и Б-Б - оси вращения лопастей. А1,2,3 - шестерни механизма Фергюссона.
Симметричные детали относительно оси вращения винта имеют ту же нумерацию.
Углы: Угол α - угол наклона продольных осей лопастей к оси вращения ступицы. Угол β - угол ориентации лопасти в пространстве, т.е. угол наклона поперечной оси лопасти к оси Y. Угол γ - угол атаки лопасти, образованный лопастью по ходу ее вращения между ее плоскостью и касательной к окружности вращения; если передняя кромка направлена наружу - угол атаки положительный, и наоборот. Т.к. лопасть имеет радиально-постоянный шаг, то угол атаки при повороте лопасти вдоль продольной оси будет одинаков на любом ее участке. Угол δ - угол скрещивания продольной оси лопасти к оси вращения ступицы.
Стрелками обозначено: Б - направление силы тяги; ∂, е - направления вращения ступицы и лопасти; ж, з - опускание лопасти; и, к, л, м - направление поворота лопасти; н, п, - направления перемещения центрального вала; R1 - радиус перемещения шарнира 45; R2 - радиус перемещения шарнира 33.
Механизмы, примененные в конструкции машущего винта:
1. «Трехзвенный зубчатый механизм со сферическим зацеплением», И.И. Артоболевский «Механизмы в современной технике», изд. Москва «Наука», 1980 г., том IV, стр.29, механизм №2169.
2. «Зубчато-цевочный механизм мальтийского креста с овальной цевкой», там же, стр.299, механизм №2482.
3. «Зубчатый планетарный механизм Фергюссона», там же, стр.482, механизм №2714.
В описании рассматривается применение изобретения, в основном, в судостроении, хотя аналогичный принцип можно применить и в авиатехнике.
В предлагаемом винте процесс машущего движения установленных на ступицу лопастей происходит во время вращения ступицы и при этом сами лопасти вращаются в обратную сторону, со скоростью, равной скорости вращения ступицы.
1. Способ осуществления двух махов за один оборот ступицы.
Для уяснения принципа работы рассмотрим работу винта с одной плоской лопастью при двухмаховом способе создания тяги.
Продольная ось лопасти 1 установлена под фиксированным углом наклона α к оси вращения ступицы 2 винта, равным, допустим, 45° в одной плоскости с осью вращения ступицы, а ориентация оси поперечного сечения лопасти находится под углом β, равным 90° (фиг.1 и 2). Способ ориентации лопасти во время вращения винта представляет собой два взаимосогласованных вращения - ступицы и лопасти, осуществляемых следующим образом: ступица вращается вокруг своей продольной оси вращения, а лопасть, установленная на ступице, вращается вокруг собственной продольной оси с соблюдением «парадокса Фергюссона», обеспечивающего соответствие одному обороту лопасти вокруг оси ступицы один оборот лопасти вокруг собственной оси в противоположном направлении - т.е. ориентация всех лопастей на всем обороте ступицы остается одинаковой и имеет угол β, равный 90° (фиг.1, 2; отсчет идет от верхнего участка оси Y с центром вращения «О» по ходу часовой стрелки) и во время вращения ступицы этот угол не изменяется. Таким образом, при рассмотрении винта в проекции на ось Y, лопасть 2, находясь в положении 0° поворота ступицы, ориентирована вверх (положение «а») под углом α, равным 45°, и при повороте ступицы 1 по стрелке «∂» на угол от 0° до 90°, лопасть 2 опускается плашмя по стрелке «е» (в положение «б») и ее угол α в выбранной проекции становится равным 0°, а затем, при повороте ступицы 1 на угол от 90° до 180°, лопасть 2 опускается также плашмя по стрелке «ж» (в положение «в») до угла α, равным минус 45°. В результате, в проекции на ось Y, мы наблюдаем мах лопастью на угол 90°, который оказывает воздействие на среду, вызывая тягу. При дальнейшем вращении ступицы на угол от 180° до 360° происходит аналогичный мах вверх и лопасть 2 перемещается из положения «в» в положение «г» с совершением полумаха, а затем снова в положение «а» тоже с совершением полумаха. Т.о. за один оборот ступицы происходит два полных маха одной лопастью, которые мы наблюдаем в проекции на ось Y. При этом вращение ступицы 1 и лопастей 2 вокруг своих осей снижают инерционные потери на машущий привод, а в случае достаточно быстрого приложения силы со стороны лопасти, вода под ней из-за присущей ей вязкости не успевает растекаться и приобретает свойства твердого тела и именно от нее отталкивается лопасть. В проекции, поперечной оси вращения винта (фиг.1), лопасть 2 скользит по дуге плашмя сначала вправо при повороте ступицы от 0° до 90° с совершением полумаха, а затем влево при повороте ступицы с 90° до 180° также с совершением полумаха. Чтобы лопасть 2 не создавала тормозных сил в секторе торможения на протяжении второй половины маха, имеется два способа устранить это явление: а) она должна изгибаться синусоидально по закону создаваемой волны и, чтобы вписываться в синусоиду этой волны, желательно выполнять лопасти гибкими в продольном сечении, при этом гибкость лопасти может быть пассивной или активной, например, регулироваться посредством изменения давления внутри лопасти - чем выше давление - тем жестче лопасть - тем больше шаг синусоиды; б) перейти на полумаховый принцип создания тяги, описание которого приводится ниже.
При большем количестве лопастей последние равномерно распределяются по окружности и могут устанавливаться в любой ориентации по углу β, т.к. это совершенно не влияет на процесс создания тяги, просто она переходит в плоскость ориентации лопасти. Количество лопастей может быть любым - от 1 до 10 и более, каждая лопасть увеличивает количество махов пропорционально. И т.к. тяга образуется при любой ориентации плоскости лопасти, то есть смысл делать лопасть с большим количеством плоскостей, например, с крестообразным или подобным ему многореберным пространственным поперечным сечением, это обеспечит создание тяги в осевом направлении сразу в нескольких плоскостях, что кардинально повысит эффективность движителя.
Предлагаемый способ махового движения лопастей в текучей среде сочетает в себе винтовой движитель с вращательно-маховым движением лопастей с постоянной ориентацией в одном направлении, осуществляемый согласованно на протяжении полного цикла вращения ступицы, что позволяет посредством лопастей с пространственным поперечным сечением получать постоянный одинаковый упор от лопасти во всех плоскостях ее поперечного сечения, а также регулирование силы тяги посредством изменения угла наклона лопастей к оси вращения ступицы при ее равномерном вращении.
При фиксированном угле наклона лопастей к оси вращения ступицы винт может быть оборудован насадкой и/или спрямляющим устройством, которые позволят сосредоточить потоки воды от махов лопастей в осевом направлении.
2. Способ осуществления четырех полумахов за один оборот ступицы. Предлагаемый двухмаховый способ создания тяги может быть модернизирован посредством перехода на n-маховый способ.
Для уяснения принципа работы рассмотрим работу винта с одной лопастью (фиг.3) по четырехполумаховому способу. При наблюдении винта в профиль, т.е. перпендикулярно оси вращения ступицы, аналогично фиг.2, по линии оси X в проекции на ось Y, на ступице винта, выполненной в виде конуса, расположена в верхнем положении «а» лопасть 2 с отклонением вверх относительно оси ступицы под углом, например, α, равным 45°. В первом и третьем квадрантах (отсчет идет от верхнего участка оси Y с центром вращения «О» по ходу часовой стрелки) вращения ступицы ориентация поперечного сечения лопасти расположена горизонтально (угол β равен 90°), а во втором и четвертом β равен 0°, поэтому в профиль по горизонтали будет видно, что при повороте ступицы на 90° лопасть перемещается в вертикальном направлении (т.е. опустится) в положение «б» до угла α, равным 0°, т.е. с позиции наблюдателя произошел полумах лопастью, что вызовет появление силы тяги, затем лопасть 2 резко поворачивается на 90° по ходу вращения ступицы, т.е. происходит ее доворот по стрелке «к», при этом направление маха изменяется с вертикального на горизонтальное, и дальнейший мах надо наблюдать в проекции на ось X. При дальнейшем повороте ступицы до 180° лопасть перемещается в положение «в» и в этом положении снова доворачивается на 90° по стрелке «л», т.е. происходит еще один полумах лопастью 2 уже в горизонтальной плоскости, т.е за один полуоборот ступицы происходит два полумаха или один мах без замахов и входа лопасти в секторы тормозного воздействия. При дальнейшем вращении ступицы происходит перемещение лопасти 2 в положение «г» и доворот ее на 90° по стрелке «м» и перевод направления создания тяги с горизонтального на вертикальный, затем снова лопасть становится в положение «а» и доворачивается по стрелке «и» на 90°, т.е. лопасть 2 делает еще два полумаха вверх в разных направлениях. Т.о. за один оборот ступицы лопасть делает четыре полумаховых движения без перехода лопасти в зоны торможения и без замахов. При большем количестве лопастей последние равномерно распределяются по окружности, но могут устанавливаться в любой ориентации по углу β, т.к это совершенно не влияет на процесс создания тяги, просто она переходит в плоскость ориентации лопасти, при этом количество лопастей также может быть любым - от 1 до 10 и более, каждая лопасть увеличивает количество махов пропорционально количеству остановок механизма прерывистого движения. В данном случае целесообразно применение лопасти с авиационным несимметричным профилем 53 (фиг.9), это уменьшит сопротивление движению лопасти и снизит скольжение.
Количество маховых движений может быть изменено посредством применения механизма прерывистого движения, например, механизма мальтийского креста, с другим - n-м - количеством остановок, например, тремя, пятью, шестью, семью и т.д., при этом угол доворота лопастей по ходу или против хода вращения ступицы будет равен 360/n°. При использовании другого механизма прерывистого движения угол доворота лопастей может быть другим. При этом количество лопастей может быть любым и каждая из них может устанавливаться одна относительно другой под любым углом ориентации β. При фиксированном угле наклона лопастей к оси вращения ступицы винт может быть оборудован насадкой, которая позволит сосредоточить потоки воды от махов лопастей в осевом направлении. При регулируемых углах α наклона лопастей к оси вращения ступицы силу тяги можно регулировать уменьшением или увеличением угла α наклона лопастей при равномерном вращении ступицы.
Для реализации необходимого алгоритма вращения лопастей в механическом приводе может быть использован «Зубчатый планетарный механизм Фергюссона», принцип действия которого, для наглядности, представлен на фиг.1, состоящий из центральной шестерни А1, сателлита А2, шестерни привода вала лопасти А3. При вращении ступицы винта 2, которая является водилом для шестерен А2 и А3, центральная шестерня A1 остается неподвижной, а сателлит А2, входящий в зацепление с неподвижной центральной шестерней А1 и шестерней привода вала лопасти А3, обегает шестерню А2, вращаясь по направлению вращения ступицы винта 2, это обеспечивает вращение лопасти 1 на всем обороте ступицы 2 со скоростью вращения, равной скорости вращения ступицы винта 2, только в противоположную сторону. При остановке центральной шестерни А1 и при равных размерах шестерен А1 и А3 получается «парадокс Фергюссона», заключающийся в том, что шестерня А3 совершает круговое поступательное движение, при этом угол ориентации β лопасти на всем обороте ступицы остается постоянным. При установке лопастей 1 под углом 0°<α>90° осуществляется 2 маха за один поворот ступицы 2, т.к. «парадокс Фергюссона» соблюдается на протяжении всего оборота ступицы 2. При этом способе махов механизм прерывистого движения не нужен.
Тягу в осевом направлении можно получить (фиг.7, 8) при угле β ориентации гребковых лопастей, равным 0°, если оси Б-Б и В-В вращения гребковых лопастей 46, 49 в плоскости, параллельной оси O-O вращения ступицы, будут отклонены на угол скрещивания 0°>δ>90° и установлены на приводных лопастях 47, 48 - это вынесет лопасти 46, 49 из гидродинамической тени ступицы 2 под углом δ и даст им возможность работать в свободной среде. В данном конкретном случае гребковые лопасти 46, 49 устанавливаются с углом ориентации β, равным 0°, а «парадокс Фергюссона» обеспечивается посредством гибких связей в виде бесконечных ремней (либо цепей), установленных на шкивах (звездочках) с одинаковым диаметром (не показано), при этом центральные шкивы, установленные по оси вращения ступицы 2, находятся в неподвижном положении, а для обеспечения скрещивания лопастей на угол δ, приводные шкивы валов гребковых лопастей повернуты на угол δ - гибкая связь в виде ремня это легко обеспечивает. Угол скрещивания δ образован проекцией осей Б-Б и В-В на ось О-О, образуя оси Б1-Б1 и B1-B1, и измеряется между осями O-O и Б1-Б1 или O-O и В1-В1. Мах образуется при повороте ступицы 2 на 180°, при проекции на ось X это будет выглядеть так, как бы лопасть 46 переместилась в положение лопасти 49. Для усиления возможностей движителя по созданию тяги приводные лопасти 47, 48 устанавливаются с углом атаки по ходу вращения и им придается обтекаемый профиль в виде лопасти винта.
Угол скрещивания может быть обеспечен как расположением лопастей в параллельных оси вращения ступицы плоскостях, так и в скрещивающихся плоскостях с углами наклона и/или скрещивания от 0° до 90°.
Аналогичный эффект можно получить при установке гребковых лопастей 46, 49 параллельно оси О-О без скрещивания, но при возможности отклонения лопастей под действием гидродинамических сил, которые будут отклонять лопасти, установленные либо на шарнирах, либо обладающих гибкостью, на определенный угол наклона α. При вращении ступицы 2 отклоненные лопасти будут толкать воду в осевом направлении.
На фиг.4 применена зубчатая передача, которая посредством передаточных отношений взаимодействующих шестерен позволяет соблюсти «парадокс Фергюссона», содержащая центральную шестерню - 16, вращающуюся, например, с удвоенной скоростью в ту же сторону, что и ступица 2, шестерни вращения лопастей 13 при передаточном отношении 1:1 с центральной шестерней вращаются со скоростью вращения ступицы 2, но в обратную сторону. Такая конструкция позволяет уменьшить количество шестерен в ступице 2 и упростить механизм. Крутящий момент от силовой установки 3 передается по силовому валу 4 на коническую шестерню 6 и далее через шестерню 11 (с передаточным отношением 1:1) на полый вал 12, соединенный со ступицей 2. Центральная шестерня 16 установлена на центральный вал 10 и приводится во вращение от конической шестерни 8 с удвоенной скоростью относительно ступицы 2, шестерня 8 вращается от конической шестерни 7 (с передаточным отношением 1:2) в ту же сторону, что и ступица 2. Шестерни 13 оборудованы валами 14 вращения лопастей 1.
Конструктивных решений по компоновке механизма передачи вращения лопастям может быть множество. Например, для создания автономного устройства в качестве замены обычного винта в лодочных моторах, может быть применена схема, при которой центральная шестерня неподвижно крепится на гондолу, а силовой вал лодочного мотора вращает ступицу, в которой установлены сателлиты и шестерни вращения лопастей.
Винт может работать по n-маховому принципу. Рассмотрим механизм, позволяющий организовать четыре полумаха за один поворот ступицы, другие механизмы аналогичны. Четырехполумаховый принцип осуществляется при условии, что «парадокс Фергюссона» соблюдается на протяжении всего оборота ступицы с тем лишь исключением, что через каждые 1/4 оборота ступицы, лопасти поворачиваются, предпочтительно, по направлению вращения, на 90° посредством, в данном случае, мальтийского механизма, при этом скорость вращения лопасти на всем обороте равна скорости вращения ступицы винта, только в противоположную сторону, за исключением участков поворота лопасти на 90°, а водило мальтийского механизма вращается в 4 раза быстрее ступицы в противоположную сторону, чтобы обеспечить полный оборот мальтийского креста по ходу вращения ступицы за один ее оборот.
Для осуществления четырех одновременных поворотов лопастей 1 (фиг.4) на 90° за период оборота ступицы 2 по ходу ее вращения, использованы механизм Фергюссона и прерывистого движения в виде «зубчато-цевочного механизма мальтийского креста», в данном случае применен механизм с четырьмя пазами и с овальной цевкой как безударный, но можно применить и другие механизмы и с другим количеством остановок, при применении механизма с n-м количеством пазов - поворотов будет n с углом поворота 360/n°. Водило мальтийского креста 24 вращается в противоположную сторону относительно ступицы 2 с учетверенной скоростью, чтобы за один оборот ступицы винта 2 обеспечить четыре резких поворота центрального вала 10 для смены ориентации направления рабочей поверхности лопасти на 90° через каждые 90° поворота ступицы 2 по ходу ее вращения. Принцип работы мальтийского механизма таков. При вращении ведущего звена - водила 24 его овальная цевка входит в прорезь ведомого звена - креста 25 и, скользя в ней, поворачивает крест, в данном случае, на 90°. После выхода цевки из прорези креста, последний останавливается и остается неподвижным, пока цевка, продолжая свое движение, не сделает оборот и снова войдет в следующую прорезь креста, и т.д. Для фиксации креста, то есть предотвращения самопроизвольного поворота креста во время остановки, ведущее звено снабжено запирающим цилиндрическим выступом с выемкой, а крест очерчен дугами окружностей. Поворот креста возможен только тогда, когда его луч совмещен с выемкой выступа. За один оборот ведущего звена происходит поворот креста на 1/4 часть оборота в противоположную сторону. Поэтому для осуществления четырех оборотов креста за один оборот ступицы водило 24 (фиг.5) должно вращаться в четыре раза быстрее ступицы 2 и в противоположную сторону, если нам необходимо осуществить доворот лопастей по ходу вращения ступицы. Мальтийский механизм включается посредством элекромагнита или цилиндра 21, который, двигая вал 23, вводит коническую шестерню 20 в зацепление с шестерней 6. При этом не имеет значения какова в данный момент ориентация лопастей.
При применении жестких лопастей 1 с фиксированным углом α наклона к оси вращения ступицы, с целью увеличения силы тяги винта, винт может быть оборудован кольцевой насадкой 18, установленной посредством пилона 19 на стойке 5. Либо кольцевая насадка 18 может быть соединена с концами лопастей посредством вращающихся сферических 15 или цилиндрических шарниров, установленных на концевой части лопастей 1, при этом она будет вращаться вместе с винтом. Кольцевая насадка имеет авиационный профиль или обтекаемую форму в направлении преимущественного направления. В насадке 18 может быть установлено спрямляющее поток устройство, например, контрпропеллер в виде нескольких крестообразно или параллельно установленных перегородок с симметричным авиационным профилем 17, а перед винтом может быть установлен контрвинт. Контрпропеллер может быть оборудован конусообразным выступом в сторону ступицы. Эти устройства позволят перенаправить радиально направленные струи воды от маховых движений в осевом направлении.
На фиг.4 представлена ступица винта 2 с фиксированным углом α наклона лопастей 1 к оси вращения ступицы 2. Но для лучшего регулирования тяги при неизменных скоростях вращения, а также для снижения гидродинамического сопротивления неработающего винта на судах, оборудованных, например, парусным движителем, необходимо иметь механизм изменения углов наклона. На фиг.5 представлен винт с изменяемым наклоном лопастей к ступице винта, содержащий сферические шестерни - центральную 27 и сателлитную 26. Сателлит 26, перекатываясь вдоль по поверхности центральной шестерни 27, не выходит из зацепления с ней, и тем самым передает крутящий момент под углами от 0° до 90°. Изменение угла наклона лопастей 1 осуществляется путем перемещения центрального вала 10 по стрелкам «n» и «н» посредством, например, электроцилиндра 22, при этом центральная сферическая шестерня 27 перемещается в положение 31 и 32, обеспечивая наклон лопастей 1.
На фиг.6 представлена кинематическая схема «трехзвенного зубчатого механизма со сферическим зацеплением». Он содержит центральную сферическую шестерню 27, жестко посаженную на центральный вал 10, сферические сателлиты 26, соединенные с прямыми сателлитами 46 и взаимодействующие с шестернями 13 вращения лопастей 1. Шестерни 13 и 45 соединены между собой водилом 29, а сферические шестерни 27 и 26 соединены фигурным рычагом-водилом 41, который установлен на шарнире 40 вращающейся втулки 39 на валу 10. Рычаг-водило 41 в соединении с водилом 29 представляет собой сгибаемое в шарнире 44 водило, удерживающее шестерни 27, 26, 29,13 в зацеплении даже при взаимном угловом смещении. Процесс передачи крутящего момента осуществляется при перекатывании сферической шестерни 26 по сферической поверхности шестерни 27. На фиг.6 показаны промежуточные положения 33 и 36 отклонения сферического сателлита 26 на углы 45° и 90° соответственно, при этом рычаг-водило 41 также занимает соответствующие промежуточные положения 42 и 43, двигаясь по радиусу R1 перемещения шарнира 44, обеспечивая полное зацепление при любом угле отклонения сферического сателлита 26. Вторым альтернативным способом удержания сферического сателлита 26 в зацеплении со сферической шестерней 27 является то, что сферический сателлит 26 оборудован скользящим шарниром 32, взаимодействующим с направляющей-водилом 34, которая также вращается на центральном вале 10 на втулке 38, при этом шарнир 32, при разных углах наклона сателлита 26, перемещается в положения 35 и 37 по радиусу R2 перемещения шарнира 32. Полному зацеплению сферических шестерен способствует шарнир 28, водило 29 и рычаг-водило 41 или направляющая-водило 32, которые лишают взаимодействующие шестерни свободы перемещений в других направлениях, кроме заданного.
Наклон сателлита 26 к центральной шестерне 27 осуществляется посредством перемещения центрального вала 10 (фиг.5) по оси «О-О», перемещающему сферическую шестерню 27 в положения 30 и 31 в направлении стрелок: «н» - увеличение угла наклона лопастей к ступице, и «n» - уменьшение угла наклона лопастей к оси вращения ступицы винта.
Для снижения нагрузок на механизм вращения лопастей, последние выполнены с симметричным и/или пропорциональным профилем относительно их продольной оси вращения. Для осуществления двух махов профиль лопасти может быть плоским, таким, как ледокольный 50 (фиг.9), двояковыпуклый сегментный 51 или пространственный в виде многореберного профиля, например, креста прямого 58, Z-образного 61 или S-образного 62, шестиреберного 59 или многореберного 60, и т.д. При работе винта с осуществлением четырех полумахов, для уменьшения бокового скольжения винта, профиль лопастей может быть авиационным несимметричным 53 или симметричным 52, угловым 55, выпукло-вогнутым 54, сегментный плоско-выпуклым 56, клиновым 57, а также с профилями 61, 62 и др.
Контур лопастей может иметь любую, предпочтительно, симметричную форму, например, каплана, трапециевидную, эллипсную, прямоугольную и др. При оборудовании винта насадкой и/или при регулируемых углах наклона лопастей концевые и/или корневые участки лопастей желательно выполнять треугольными, пирамидальными или конусными и/или прямыми при фиксированных углах наклона. Лопасти могут быть полностью жесткими, жесткими в поперечном сечении и гибкими в продольном сечении с изменяемой по сечению жесткостью с пассивно или активно деформируемым продольным профилем, это позволит иметь более мягкий ход и бесшумность, увеличит КПД движителя. Продольному профилю плоской лопасти можно придавать серповидный упруго деформируемый профиль, направленной выемкой в сторону совершения маха, это позволит в конце гребка получить выталкивание воды лопастью с большей скоростью.
Привод вращения лопастей можно осуществить посредством передачи с гибкой связью, например, цепью, ремнем, канатом, т.к. лопасть будет работать при любом угле ориентации β, и даже неизбежное проскальзывание гибкой связи в шкивах со смещением угла ориентации не особо повлияет на производительность винта.
Машущий винт может быть выполнен, как вариант, в виде активного руля или винто-рулевой колонки, представляющей из себя стойку, соединенную с корпусом судна, в котором установлены механический привод или электродвигатель, передающие вращение на ступицу с гребным винтом, стойка соединена с гондолой, в которой расположены механизмы прерывистого движения и органы управления его отключением и перемещения центрального вала, в ступице расположен механизм вращения и наклона лопастей. Вращаясь вокруг своей оси, винт создает упор в осевом направлении, для изменения направления упора он требует поворота рулевой колонки на угол поворота. Винт с устройством изменения угла наклона лопастей к ступице позволяет достигать изменения величины упора без изменения частоты вращения вала приводного двигателя. Для создания сил торможения посредством винта лопасти раскрываются на угол наклона α, близкий или равный 90°.
Механический привод машущего винта может быть исполнен в самой простой форме с любым фиксированным или изменяемым углом наклона лопастей к оси вращения ступицы и механическим приводом. Более сложный механизм винта может обеспечить изменение углов наклона лопастей к ступице и ориентации лопастей по нужному алгоритму.
Согласно настоящему изобретению, предлагается движитель в виде машущего винта, в котором отличительными и новыми элементами являются способы маховых движений, профили лопастей, механизмы для реализации маховых движений, т.е. управлением ориентацией лопастей при их орбитальном движении, а также механизм регулирования наклона лопастей, в частности, способы удержания в зацеплении сферических шестерен, при котором присутствует возможность управления тягой в соответствии с критерием максимальной гидродинамической эффективности, получения лучших характеристик во всем рабочем диапазоне. При этом максимально уменьшаются проблемы, связанные с кавитацией лопастей, движитель работает с максимальной гидродинамической эффективностью в любой ситуации, способный удовлетворить требования, выдвигаемые критерием оптимизации гидродинамики, универсальный, с точки зрения кинематики, и надежный, с точки зрения механики, с длительным сроком службы и не требующий значительного обслуживания, более простой в мелкосерийном производстве.
Изложенные выше способы и конструкции механизмов машущего винта являются их иллюстрацией и не исчерпывают всех вариантов конкретного исполнения, не являются ограничением для применения других технических решений, которые без нарушения основной идеи технического решения могут быть использованы на практике.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| МОНОБЛОЧНАЯ СИЛОВАЯ УСТАНОВКА | 2000 |
|
RU2198298C2 |
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| ПАКЕТНАЯ ЛОПАТОЧНАЯ МАШИНА | 2001 |
|
RU2189501C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ СИЛОВАЯ УСТАНОВКА МОДУЛЬНОГО ТИПА | 1999 |
|
RU2164304C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "СТРЕКОЗА" | 1993 |
|
RU2083437C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |
| СПОСОБ ДВИЖЕНИЯ НЕСУЩЕЙ ПОВЕРХНОСТИ В ТЕКУЧЕЙ СРЕДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ "МУХА" И "ВЕЕР") | 1998 |
|
RU2147545C1 |
| РОТОРНО-ПЛАСТИНЧАТЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2196905C2 |

Изобретение относится к движителям для водного и воздушного транспорта. Способ образования махов установленными на ступице винта лопастями предусматривает совмещение вращательного движения лопастей вокруг оси вращения ступицы и вращательного движения лопастей вокруг своих продольных осей. Вращение лопастей вокруг своей продольной оси обеспечивают в направлении, противоположном вращению ступицы, и с угловой скоростью, равной угловой скорости вращения ступицы. Машущий винт для осуществления указанного способа содержит лопасти, продольные оси которых устанавливают в одной плоскости, или со скрещиванием в параллельных плоскостях, или в скрещивающихся плоскостях с углами скрещивания от 0° до 90°. Винт оборудуют механизмом прерывистого движения, обеспечивающего за один оборот ступицы совершение n-го количества доворотов лопасти по ходу или против хода вращения ступицы. Винт может быть оборудован дополнительным механизмом, обеспечивающим регулирование наклона лопастей, и/или направляющими устройствами потока среды. Достигается повышение КПД винта. 2 н. и 16 з.п. ф-лы, 9 ил.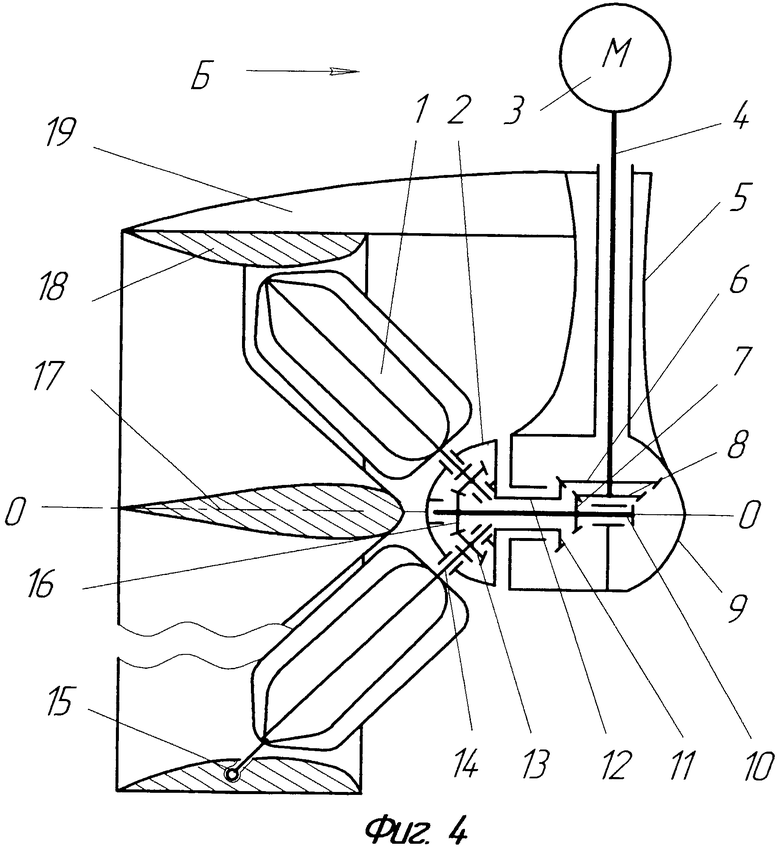
1. Способ образования махов установленными на ступице винта лопастями, сочетающий два вращения лопастей: а) вращательное движение лопастей вокруг оси вращения ступицы; б) вращение лопастей вокруг своих продольных осей в направлении, противоположном вращению ступицы, при этом продольные оси лопастей установлены с углом наклона от 0 до 90° к оси вращения ступицы, отличающийся тем, что винт оборудуют, по крайней мере, одной лопастью, продольные оси лопастей устанавливают в одной плоскости или со скрещиванием в параллельных или скрещивающихся плоскостях с углами скрещивания от 0 до 90°, вращение лопастей осуществляют со скоростью, равной скорости вращения ступицы, но в противоположную сторону относительно направления вращения ступицы, при необходимости винт оборудуют механизмом прерывистого движения, обеспечивающим за один оборот ступицы совершение n-го количества доворотов лопасти через каждые 360/n° поворота центральной шестерни или шестерни привода лопасти на установленный угол, предпочтительно 360/n°, по ходу или против хода вращения ступицы.
2. Винт с установленными на ступице лопастями, сочетающий два вращения лопастей: а) вращательное движение лопастей вокруг оси вращения ступицы; б) вращение лопастей вокруг своих продольных осей в направлении, противоположном вращению ступицы, при этом продольные оси лопастей установлены с углом наклона от 0 до 90° к оси вращения ступицы, отличающийся тем, что винт оборудован, по крайней мере, одной лопастью, продольные оси которой установлены в одной плоскости или со скрещиванием в параллельных или скрещивающихся плоскостях с углами скрещивания от 0 до 90°, угловые скорости вращения каждой лопасти вокруг своих продольных осей равны скорости вращения ступицы, но вращаются в противоположном направлении относительно направления вращения ступицы, при этом винт может оборудоваться дополнительными механизмами, обеспечивающими регулируемый наклон лопастей относительно оси вращения ступицы и/или прерывистое движение лопастей, и/или направляющими устройствами для потоков среды.
3. Винт по п.2, отличающийся тем, что в качестве механизма прерывистого движения использован механизм мальтийского креста с n-м количеством пазов, посредством которого за один оборот ступицы совершается n-е количество доворотов лопасти через каждые 360/n° на угол 360/n° по ходу или против хода вращения ступицы.
4. Винт по п.2, отличающийся тем, что в качестве механизма вращения лопастей использован планетарный механизм Фергюссона.
5. Винт по п.2, отличающийся тем, что лопасти выполнены в плоскости продольного сечения в виде преимущественно осесимметричных прямоугольных, округлых или трапецеидальных фигур с линейными и/или округленными концами.
6. Винт по п.2, отличающийся тем, что лопасти выполнены в плоскости поперечного сечения в виде осесимметричных и/или пропорциональных фигур с линейными или округленными концами, плоских или пространственных, например с профилем двояковыпуклым сегментным, ледокольным, авиационным несимметричным или симметричным, угловым, выпукло-вогнутым, сегментным плосковыпуклым, клиновым, многореберным, Z- или S-образным и др.
7. Винт по п.2, отличающийся тем, что устройство изменения углов наклона лопастей выполнено посредством зубчатого механизма со сферическим зацеплением.
8. Винт по п.7, отличающийся тем, что механизм удержания сферических шестерен в зацеплении представляет собой подвижный фигурный рычаг-водило, установленный одной точкой в шарнире на вращающейся втулке с внутренней или тыльной стороны сферической шестерни в центре перемещения сферической промежуточной шестерни по дуге, а вторым концом, также с тыльной стороны, на шарнире вращающейся втулки, установленной в выбранной точке перемещения сферической промежуточной шестерни, причем фигурный рычаг-водило посредством шарнира соединен с водилом, удерживающим сателлит и шестерню вращения вала лопасти.
9. Винт по п.7, отличающийся тем, что механизм удержания сферических шестерен в зацеплении представляет собой дугообразную направляющую-водило, установленную с рабочей стороны сферических шестерен, вращающуюся на центральном вале и движущуюся вместе с поступательно движущейся промежуточной сферической шестерней вокруг центрального вала, при этом скользящий шарнир промежуточной шестерни, установленный на оси шестерни в точке, которая находится на траектории дуги направляющей, входит в зацепление с направляющей-водилом.
10. Винт по п.2, отличающийся тем, что плоская лопасть имеет серповидное продольное сечение.
11. Винт по п.2, отличающийся тем, что направляющее устройство выполнено в виде контрвинта, и/или контрпропеллера, и/или кольцевой насадки.
12. Винт по п.11, отличающийся тем, что направляющее устройство в виде контрпропеллера оборудовано конусообразным выступом, направленным к ступице.
13. Винт по п.11, отличающийся тем, что направляющее устройство в виде контрпропеллера оборудовано, по крайней мере, одним обтекаемым ребром либо взаимно перекрещивающимися или параллельными обтекаемыми ребрами в количестве более одного ребра.
14. Винт по п.2, отличающийся тем, что направляющее устройство выполнено в виде кольцевой вращающейся насадки, соединенной с концевыми участками лопастей или их валов вращения, оборудованных шарнирами, установленными в кронштейнах насадки.
15. Винт по п.2, отличающийся тем, что лопасти устанавливают с произвольным углом ориентации.
16. Винт по п.2, отличающийся тем, что в качестве механизма вращения лопастей использована зубчатая передача.
17. Винт по п.2, отличающийся тем, что в качестве механизма вращения лопастей использован привод с гибкой связью в виде цепи, ремня или каната.
18. Винт по п.2, отличающийся тем, что лопасти установлены на ступице с возможностью отклонения либо на шарнире, либо посредством собственной гибкости.
| US 3700349 A, 24.10.1972 | |||
| СПОСОБ ДВИЖЕНИЯ НЕСУЩЕЙ ПОВЕРХНОСТИ В ТЕКУЧЕЙ СРЕДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ "МУХА" И "ВЕЕР") | 1998 |
|
RU2147545C1 |
| Способ получения аминосоединений | 1975 |
|
SU668593A3 |
| Судовой лопастный двигатель | 1934 |
|
SU47908A1 |

