Изобретение может быть использовано в авиации, в частности для создания компактных маневренных летательных аппаратов с вертикальным взлетом и посадкой, а также в ветрогидроэнергетике и судовой технике.
В описании рассматривается применение изобретения в авиации, и система отсчета связана с летательным аппаратом.
В процессе машущего полета движение крыла (несущей поверхности) в упрощенном виде представляет собой комбинацию двух совмещенных во времени, периодически повторяемых простых движений: "махового" - оказывающего основное ударное воздействие на среду и "углового" - изменяющего угол атаки несущей поверхности.
В большинстве конструкций махолетов "маховые" и "угловые" перемещения несущей поверхности выполняются в поступательно-возвратном режиме, что влечет за собой инерционные нагрузки и потери, ограничения в скорости, сложность и ненадежность конструкции.
Существует ряд конструкций летательных аппаратов, в которых эффективность "махового" (ударного, с большими углами атаки) воздействия несущей поверхности на среду сочетается с преимуществами вращательного движения.
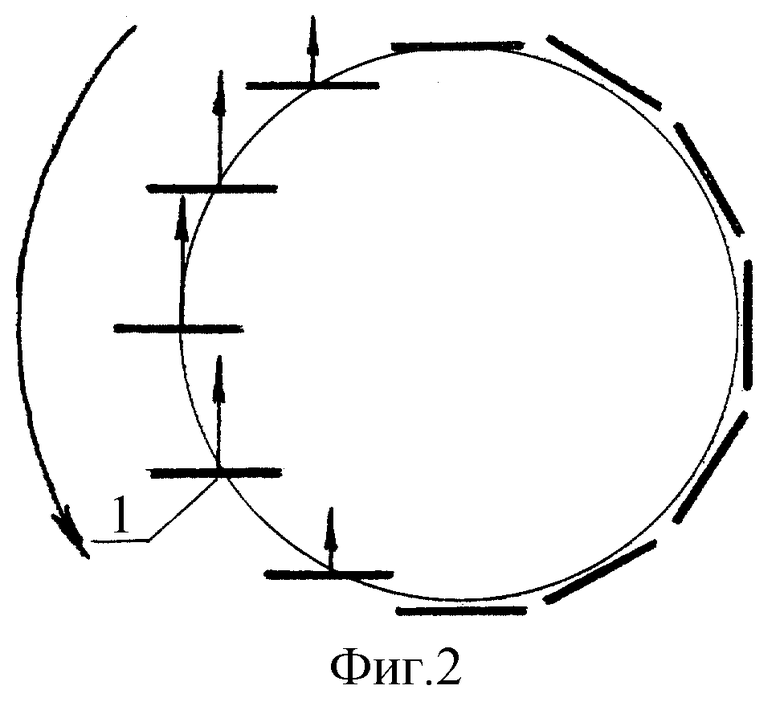
Например, в летательном аппарате (патент РФ 2033944 B 64 C 39/00. Бюл. N 12 30.04.95) использован способ движения несущей поверхности, при котором "маховое" движение - равномерное вращательное, а "угловое" положение несущей поверхности изменяется в поступательно-возвратном режиме таким образом, что в течение полуоборота "махового" движения несущая поверхность принимает горизонтальное положение (взмах вниз - рабочий ход), а в последующие пол-оборота - вертикальное положение (взмах вверх - холостой ход). См. фиг. 1. То есть, "угловое" движение несущей поверхности происходит в поступательно-возвратном режиме и ему присущи те же недостатки, связанные с инерцией.
В летательном аппарате (патент РФ 2005658 B 64 C 27/32, B 64 D 27/02ю Бюл. N 1 15.01.94) "маховое" движение несущей поверхности также равномерное вращательное, а "угловое" положение несущей поверхности меняется следующим образом: при движении вниз несущая поверхность принимает горизонтальное положение (как и в предыдущем варианте), а при движении вверх - по касательной круга "махового" движения (с нулевым углом атаки). См. фиг. 2. При этом устраняется один из недостатков предыдущего варианта (несущая поверхность не испытывает тормозящего сопротивления воздуха при движении вверх).
Этот способ движения рассматривается в качестве прототипа предлагаемого изобретения.
Прототип имеет следующие недостатки:
- "угловое" движение несущей поверхности в пределах цикла происходит с меняющейся скоростью и остановками, что влечет за собой инерционные нагрузки и потери, а следовательно, ограничение в скорости;
- низкая тяга по сравнению с возможной из-за того, что половина цикла "махового" движения несущей поверхности - холостой ход, а во время рабочего хода углы атаки несущей поверхности не обеспечивают максимального значения тяги;
- сложность конструктивного воплощения.
Цель изобретения состоит в том, чтобы предположить способ движения несущей поверхности, сочетающей в себе преимущества машущего полета и равномерного вращательного движения, свободный от недостатков прототипа.
Предлагаемый способ движения несущей поверхности в текучей среде отличается тем, что и "маховое", и "угловое" движения несущей поверхности осуществляются на протяжении всего цикла в режиме равномерного вращательного движения следующим образом: несущая поверхность с постоянной по численной величине угловой скоростью вращается вокруг собственной оси (оси "углового" вращения), а ось "углового" вращения поворачивается с постоянной угловой скоростью вокруг другой неподвижной оси (оси "махового" вращения), причем отношение численных значений угловых скоростей "углового" и "махового" вращения равно 1:2, а угол между их векторами α = 90 - 180o. См. фиг. 4 (1 - ось "углового" вращения, 2 - ось "махового" вращения).
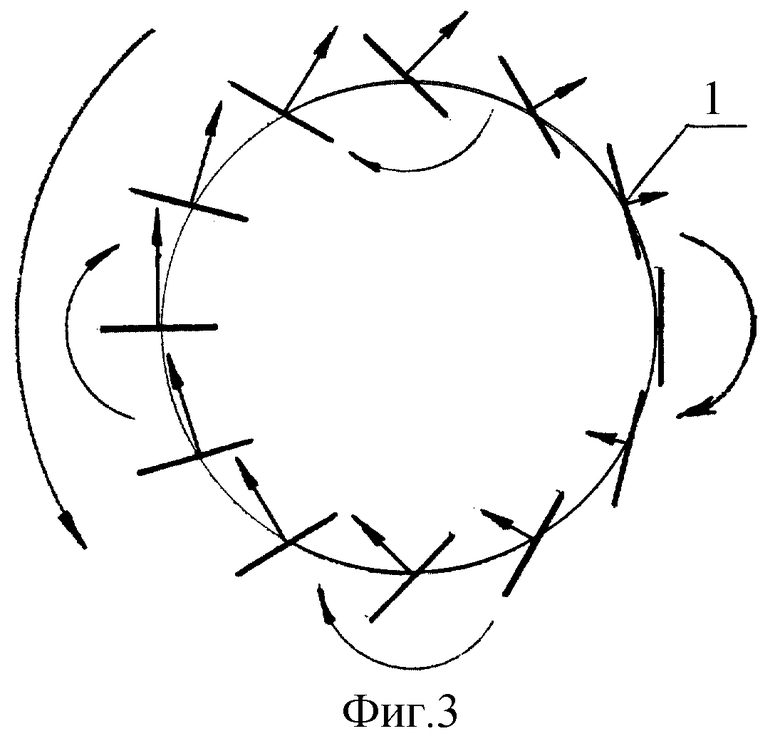
При таком способе движения несущей поверхности суммарный вектор тяги за цикл имеет определенное направление. В варианте при α = 180o (оси "углового" и "махового" вращения параллельны) составляющая вектора тяги основного направления имеет значение, близкое к максимально возможному на протяжении всего цикла. См.фиг. 3.
Предлагаемый способ движения принципиально реализуется посредством планетарных механизмов, где ось вращения колеса-сателлита вращается вокруг основной оси. Варианты устройств различаются между собой значением угла между осями вращения и типом передачи (зубчатой, фрикционной, винтовой и др. ).
Вариант устройства α = 180o (см. фиг.5) представляет собой планетарный механизм с параллельными осями вращения и фрикционной передачей и содержит несколько (по количеству лопастей) колес-сателлитов 1, связанных кинематически зубчатыми ремнями 2 с неподвижным центральным колесом 3. Водило 4 жестко связано с валом 5 устройства. На оси каждого из сателлитов жестко установлена лопасть 6. Отношение диаметра колеса-сателлита и диаметра центрального колеса равно 2:1.
При вращении вала водило приходит в движение и ось каждой из лопастей вращается вместе с ним вокруг основной оси (на фиг.5 - против часовой стрелки), совершая "маховое" вращение. При этом лопасть вращается вокруг собственной оси с вдвое меньшей угловой скоростью (на фиг.5 - по часовой стрелке), совершая "угловое" вращение.
Вариант устройства α = 90o (см. фиг.6) представляет собой планетарный механизм с перпендикулярными осями вращения и винтовой передачей и содержит несколько (по количеству лопастей) звеньев-сателлитов 1, каждое из которых установлено с возможностью свободного вращения в водиле 2 и образует с неподвижным центральным звеном 3 винтовую кинематическую пару с передаточным отношением 2:1.
Водило 2 жестко связано с валом 4 устройства. На оси каждого из звеньев-сателлитов жестко установлена лопасть 5.
При вращении вала водило приходит в движение и ось каждой из лопастей вращается вместе с ним, совершая "маховое" вращение. При этом лопасть вращается вокруг собственной оси с вдвое меньшей угловой скоростью, совершая "угловое" вращение.
В обоих устройствах лопасти установлены таким образом, что если произвольно взятое положение оси одной из них принять за исходное, то каждая из лопастей в исходном положении имеет ту же ориентацию.
В обоих устройствах, поворачивая центральное звено планетарного механизма вокруг основной оси, можно изменять направление вектора тяги.
Оба устройства могут быть использованы как в качестве движителей, так и в качестве двигателей - при определенной ориентации к потоку текучей среды.
Сущность изобретения поясняется чертежами, на которых показаны:
- изменение положения несущей поверхности в течение цикла движения с указанием векторов тяги для аналога - фиг. 1, прототипа - фиг. 2 и варианта изобретения α = 180o, фиг.3;
- движение несущей поверхности в пространстве (вариант 90o < α < 180o) c указанием угла между векторами угловых скоростей - фиг. 4;
- движитель (двигатель) "Муха" - фиг. 5;
- движитель (двигатель) "Веер" - фиг.6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| Движитель на основе мгновенно вращательной гребной пластины (лопасти) | 2020 |
|
RU2751268C1 |
| РОТОРНО-ЛОПАСТНАЯ МАШИНА | 1994 |
|
RU2100653C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| СПОСОБ РАБОТЫ БЕЗВИХРЕВОГО ГРЕБНОГО ВИНТА И УСТРОЙСТВО ДВИЖИТЕЛЯ ДЛЯ ЖИДКИХ СРЕД НА ЕГО ОСНОВЕ | 2015 |
|
RU2614444C2 |
| ВЕТРОСИЛОВАЯ УСТАНОВКА | 2007 |
|
RU2335428C1 |
| Способ работы крыльчатого движителя и устройство для его осуществления | 2019 |
|
RU2720699C1 |
| ПРОПЕЛЛЕР "УСТЮГ" | 2005 |
|
RU2310580C2 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ, НАПРИМЕР, ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2117605C1 |



Изобретение относится к авиации, а также к ветрогидроэнергетике и судовой технике. Оно может быть использовано при создании компактных маневренных летательных аппаратов с вертикальными взлетом и посадкой. Способ движения несущей поверхности в текучей среде характерен тем, что и "маховое", и "угловое" движение несущей поверхности осуществляют равномерно на протяжении всего цикла вращения. Несущую поверхность с постоянной угловой скоростью равномерно вращают вокруг собственной оси "углового" вращения. Ось "углового" вращения поворачивают с постоянной угловой скоростью вокруг оси "махового" вращения, неподвижной в системе отсчета. Отношение величин угловых скоростей "углового" и "махового" вращения равно 1:2. Угол между векторами угловых скоростей составляет 90 - 180o. При первом варианте реализации устройства для осуществления этого способа каждая лопасть гребного колеса имеет возможность вращения вокруг собственной оси, параллельной оси колеса, и снабжена звеном-сателлитом планетарного механизма, а при втором варианте каждая лопасть гребного винта имеет такую возможность вращения вокруг собственной оси, перпендикулярной оси винта, и звено-сателлит планетарного механизма. Планетарный механизм обеспечивает соответствие одному обороту лопасти вокруг оси колеса или гребного винта пол-оборота лопасти вокруг собственной оси. У гребного колеса лопасть вокруг собственной оси вращается в противоположном направлении. Технический результат реализации изобретения заключается в повышении эксплуатационных качеств устройства, предназначенного для реализации указанного способа. 3 с.п.ф-лы, 6 ил.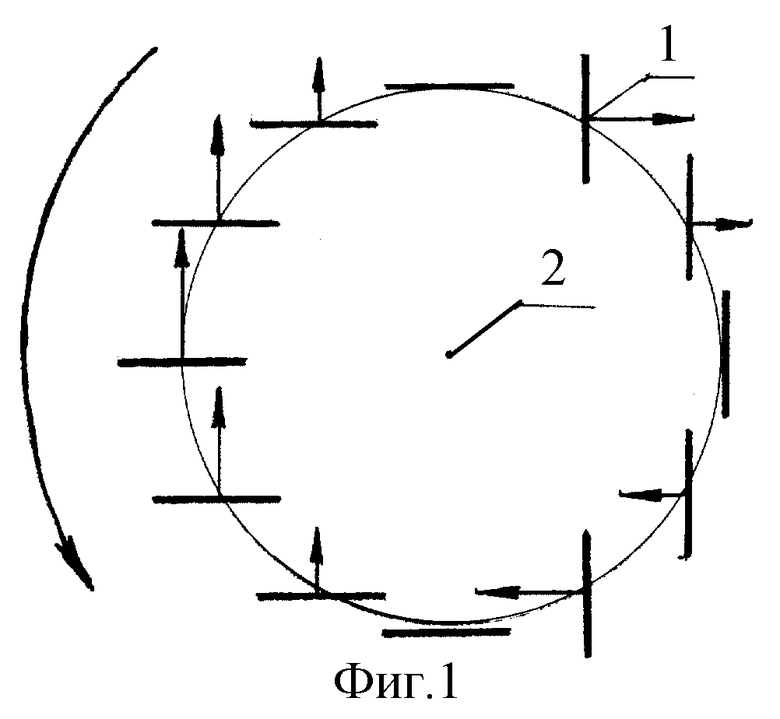
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "КЕНТАВР" | 1991 |
|
RU2005658C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Крыльчатый движитель | 1973 |
|
SU510407A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПЛАВ НА ОСНОВЕ ЦИРКОНИЯ | 1992 |
|
RU2009239C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| RU 94015045 A1, 27.12.95. | |||

