Перекрестная ссылка на родственную заявку
Данной заявкой истребуется приоритет предварительной заявки на патент США под названием «TIME DOMAIN REFLECTROMETRY» («Рефлектометрия временной области»), поданная 1 октября 2007 г., имеющая серийный №60/976615 и которая полностью включена здесь со ссылкой.
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к датчикам уровня текучей среды, а более конкретно относится к датчикам уровня текучей среды, способным к компенсированию множественных условий для обеспечения точных показаний уровня текучей среды.
Уровень изобретения
Во многих различных областях есть потребность знать текущий уровень текучей среды, находящейся внутри резервуара (сосуда). Один способ, используемый для определения текущего уровня текучей среды внутри резервуара, заключается в использовании рефлектометрии временной области (TDR). Как известно специалистам в области техники, анализ TDR включает в себя использование распространения скачка или импульса энергии, имеющего крутой фронт, также называемый сигналом опроса или возбуждения вниз по волноводу и в систему, и последующее наблюдение энергии, отраженной системой. Вместе с анализом величины, длительности и формы отраженного колебательного сигнала может быть определен характер изменения импеданса в системе передачи.
К сожалению, обеспечение точного измерения уровня текучей среды является затруднительным. Как упомянуто выше в системе TDR, сигнал опроса передается вниз по линии передачи. Линия передачи, проходящая через различные среды, имеет области из разных диэлектриков. В результате форма отраженного сигнала содержит разрывы в моменты времени, которые представляют собой диэлектрические изменения по линии передачи. Кроме того, традиционные системы TDR непрерывно выполняют опрос по всей линии передачи во временном интервале, который соответствует времени приема отражения исходного сигнала, где исходный сигнал прошел от одного конца линии передачи к другому. Этот процесс повторяется каждый раз, когда необходимо новое показание уровня, что является нагрузкой для обработки, приводящей в результате к дорогостоящей системе, требующей дополнительное потребление энергии.
В настоящее время существует потребность в точном, надежном и безопасном способе измерения количества текучей среды в контейнере. Образец такой текучей среды может включать в себя, например, топливный бак, содержащий летучие жидкости. Таким образом, в промышленности существует не определенная точно потребность в решении вышеупомянутых недостатков и несоответствий.
Сущность изобретения
Варианты осуществления существующего изобретения представляют систему и способ для точного измерения уровня текучей среды в сосуде. Кратко описанный, по конфигурации, один, среди прочих, вариант осуществления системы может быть осуществлен следующим образом. Система содержит удлиненную часть, являющуюся коаксиальной трубкой, имеющей осевое отверстие, ветвь, являющуюся коаксиальной по форме, и датчик, содержащий передатчик, способный создавать и передавать электромагнитный импульс возбуждения для прохождения по удлиненной части и ветви, и приемник для приема отраженных импульсов, где ближайший конец удлиненной части присоединен к дистальному концу ветви таким образом, чтобы создавать волновод для электромагнитного импульса, представленного датчиком.
Настоящие система и способ также обеспечивают способ точного измерения уровня текучей среды в сосуде посредством использования устройства с линией передачи и датчиком, где датчик содержит передатчик, способный создавать и передавать электромагнитный импульс возбуждения для прохождения по линии передачи, и дискретизирующий приемник с наложением сигналов, для преобразования высокоскоростных отраженных колебательных сигналов в сигнал более медленной скорости «равной продолжительности» для обработки при помощи способа, включающего в себя этапы: сканирования отрезка линии передачи, который помещен частично или полностью в текучую среду, чтобы посмотреть, где находится текучая среда по линии передачи, также называемого текущим уровнем текучей среды; слежения за уровнем текучей среды посредством идентифицирования точек обнаружения уровня текучей среды в пределах сигнала более медленной скорости «равной продолжительности», выдаваемого посредством окна (интервала) сканирования дискретизирующего приемника с наложением сигналов; и регулирования интервала сканирования дискретизирующего приемника с наложением сигналов для отслеживания в точках обнаружения в пределах представления равной длительности отражения импульса, где точки обнаружения в форме отраженного сигнала представляют положение в форме сигнала отражения импульса, представляющего уровень текучей среды.
Другие системы, способы, особенности и преимущества настоящего изобретения будут или станут очевидными для специалиста в этой области техники после изучения следующих чертежей и подробного описания. Имеется в виду, что все такие дополнительные системы, способы, особенности и преимущества, приводимые в этом описании, должны быть в пределах объема настоящего изобретения и охраняемыми приложенной формулой изобретения.
Краткое описание чертежей
Многие особенности изобретения можно лучше понять со ссылкой на нижеописанные чертежи. Компоненты в чертежах не обязательно приведены в масштабе, особое внимание вместо этого придано понятному иллюстрированию принципов настоящего изобретения. Кроме того, одинаковыми ссылочными позициями в чертежах обозначены соответствующие детали в нескольких представленных видах.
Фиг.1 - схематический чертеж, иллюстрирующий зонд в соответствии с первым примером варианта осуществления изобретения.
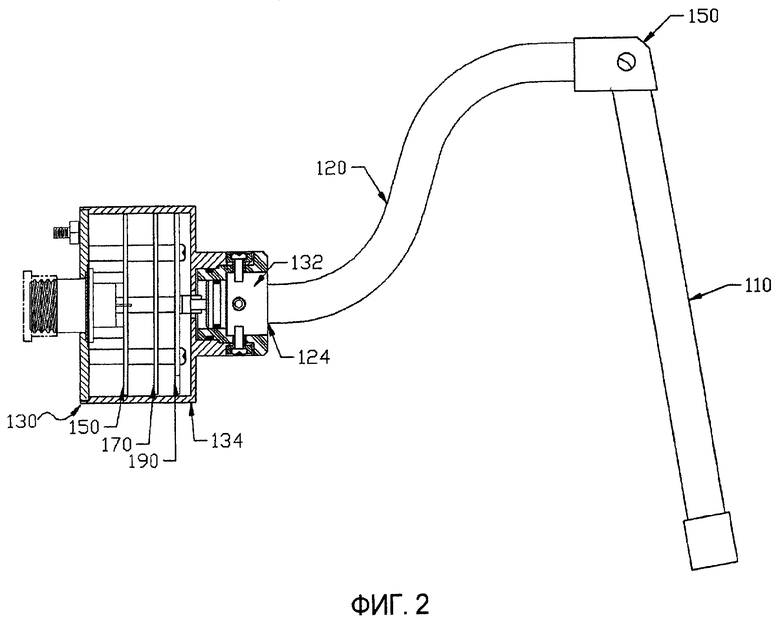
Фиг.2 - вид зонда согласно фиг.1 в поперечном разрезе.
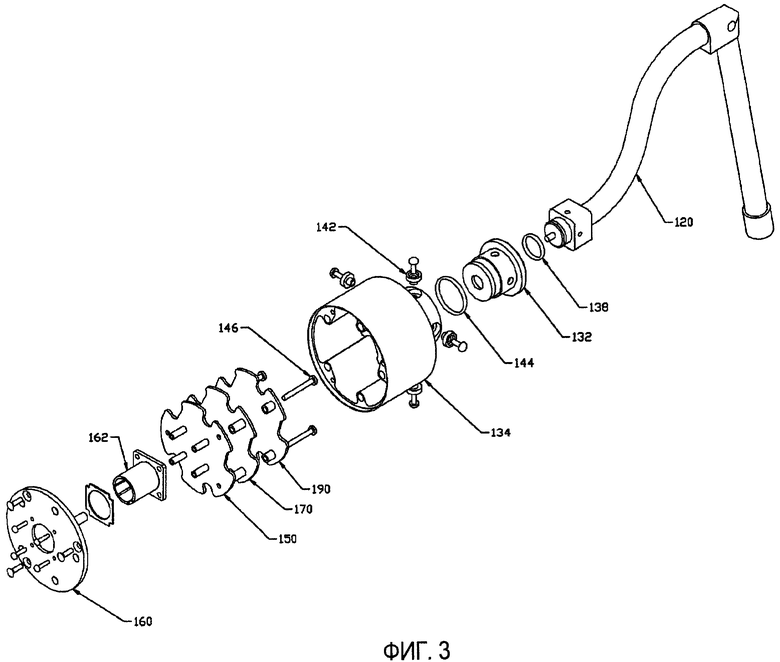
Фиг.3 - вид в разрезе зонда, где каждая часть зонда показана отдельно, как до сборки.
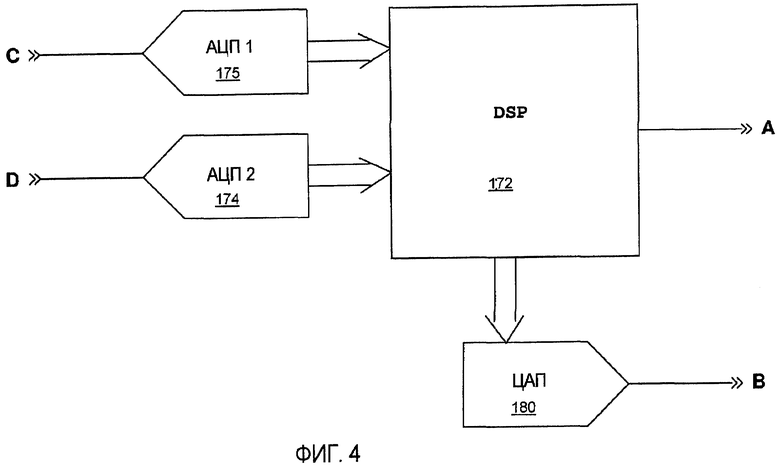
Фиг.4 - принципиальная схема, иллюстрирующая также функциональные возможности и логику, определяемые посредством цифровой РСВ зонда.
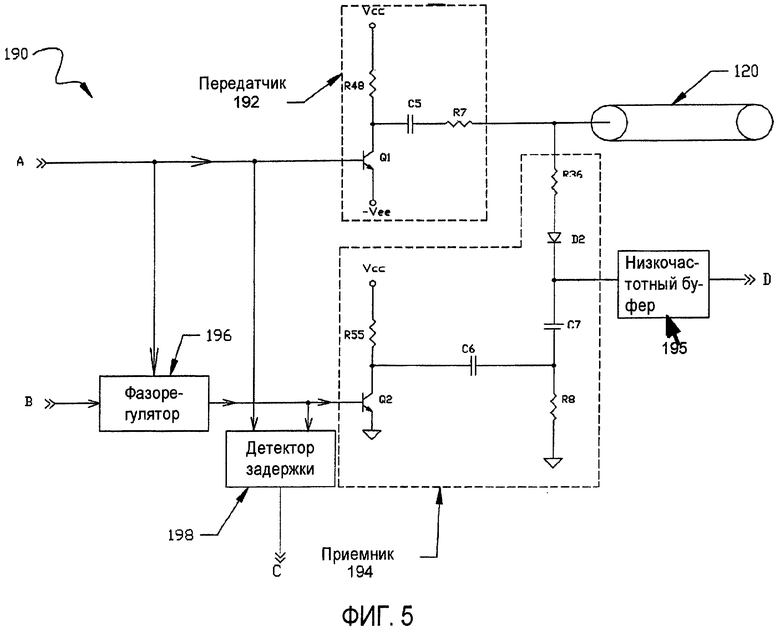
Фиг.5 - принципиальная схема, иллюстрирующая также функциональные возможности и логику, определяемые аналоговой РСВ зонда.
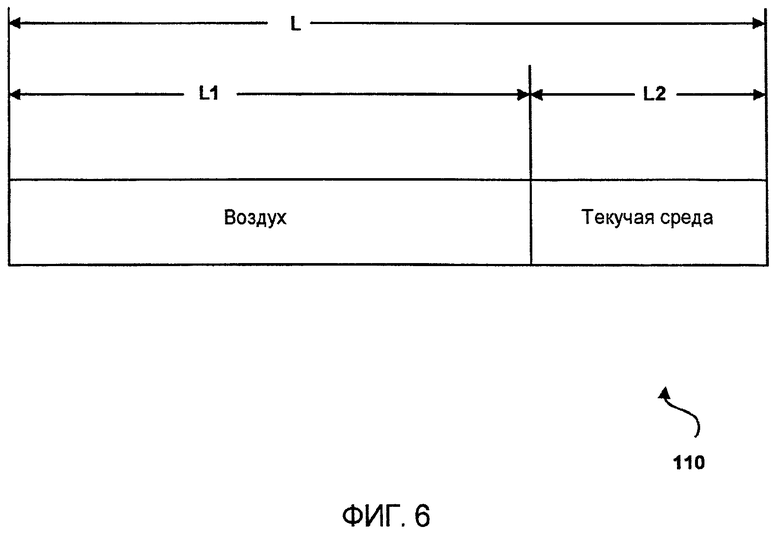
Фиг.6 - схематическая диаграмма, иллюстрирующая пример удлиненной части зонда согласно фиг.1 в целях определения диэлектрических далее постоянных текучих сред, где температура текучей среды является известной.
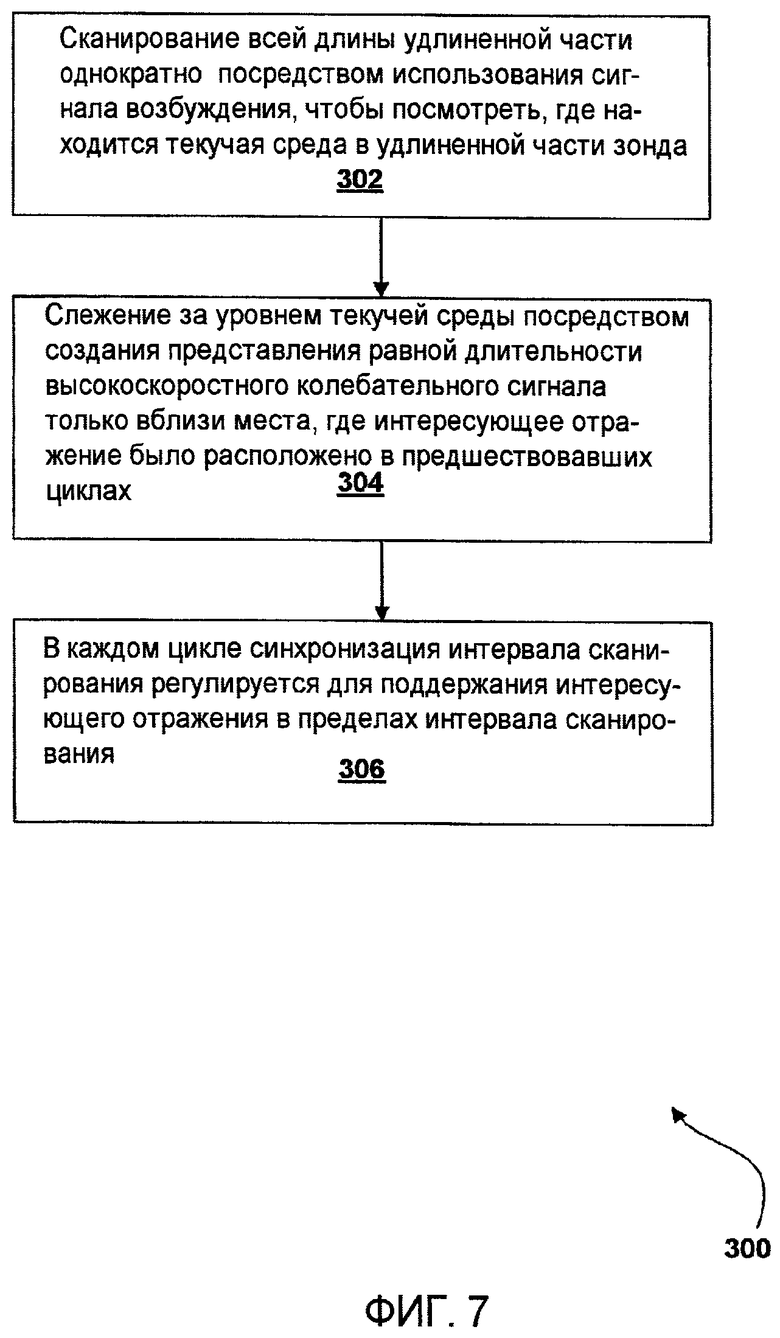
Фиг.7 - блок-схема, иллюстрирующая способ, используемый зондом для сканирования и захвата уровня текучей среды в соответствии с первым примером варианта осуществления изобретения.
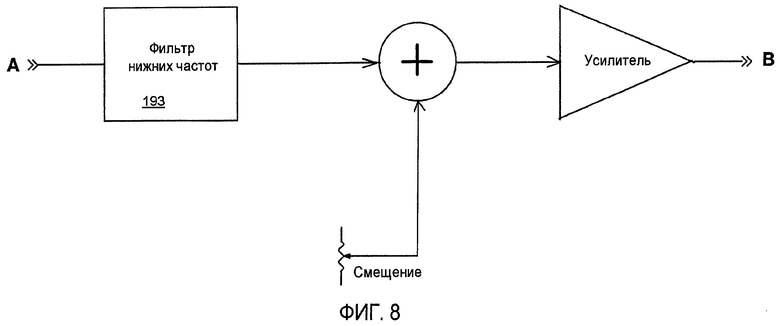
Фиг.8 - схематическая диаграмма, иллюстрирующая пример фильтра нижних частот.
Подробное описание изобретения
Настоящее изобретение представляет собой (измерительный) зонд для определения уровней текучей среды, способный точно определять уровни текучих сред в резервуаре или контейнере. В целях иллюстрирующего примера настоящий зонд описан как зонд уровня топлива, приспособленный для размещения внутри топливного бака. В таком примере зонд уровня топлива может быть использован для обеспечения точного измерения уровней газа или нефти внутри бака. Следует отметить, однако, что тип текучей среды и тип резервуара не предполагают ограничения настоящим описанием.
Фиг.1 - схематический чертеж, иллюстрирующий зонд 100 в соответствии с первым примером варианта осуществления изобретения. Как показано на фиг.1, зонд 100 содержит удлиненную часть 110, фасонную ветвь 120 и датчик 130. Удлиненная часть 110 является коаксиальной трубкой, имеющей осевое отверстие. Удлиненная часть 110 выполнена фасонной и удлиненной для обеспечения размещения внутри топливного бака, причем дистальный конец 112 удлиненной части 110 проходит к днищу топливного бака, в который может быть помещена удлиненная часть 110. Имеющаяся полость в удлиненной части 110 позволяет текучей среде входить в удлиненную часть 110 через дистальный конец 112 в полую часть для обеспечения возможности определения уровня текучей среды, что разъяснено подробно ниже.
Ближайший конец 114 удлиненной части 110 соединен с дистальным концом 122 ветви 120. Соединение между удлиненной частью 110 и ветвью 120 выполнено таким образом, чтобы сделать возможным соединение ветви 120 и удлиненной части 110 для создания волновода для электромагнитного импульса, обеспечиваемого датчиком 130. Кроме того, соединение удлиненной части 110 и ветви 120 является коаксиальным по форме. На фиг.1 изображен соединитель 150, соединяющий удлиненную часть 110 и ветвь 120, в соответствии с альтернативным вариантом осуществления изобретения зонд 100 вместо этого может быть изготовлен с удлиненной частью 110 и ветвью 120 как одна деталь.
Удлиненная часть 110 и наружный кожух фасонной ветви 120 изготовлены из проводящего материала, имеющего известный импеданс, такого, например, как алюминий, но не ограниченным им. Следует отметить, что другие металлы также могут быть использованы. Ветвь 120 заполнена диэлектриком, таким как тефлон, но не ограниченным им. Тефлоновый наполнитель является твердым диэлектриком. Использование тефлонового наполнителя в соответствии с настоящим изобретением служит, по меньшей мере, двум целям. Во-первых, тефлоновый наполнитель обеспечивает соответствие импеданса, как описано более подробно ниже, и, во-вторых, тефлон обеспечивает средство для предотвращения ингрессии текучей среды в неизмеряемую часть зонда 100, устраняя, таким образом, нежелательные отражения из-за множественных уровней текучей среды внутри зонда 100.
В соответствии с настоящим изобретением электромагнитный сигнал возбуждения, также упомянутый здесь как сигнал опроса, посылается датчиком 130 в линию передачи, где линия передачи включает в себя объединение ветви 120, удлиненной части 110 и далее за пределы дистального конца 112 удлиненной части 110. Линия передачи содержит три секции. Первая секция линии передачи проходит от источника возбуждения, такого как датчик 130, к верхней части зонда 100, также называемой дистальным концом 122 ветви 120 (также называемым началом измеримого участка), вторая секция линии передачи проходит от верхней части зонда 100 (дистальный конец 122 ветви 120) к основанию зонда 100, также называемой дистальным концом 112 удлиненной части 110. Вторую секцию линии передачи также называют измеримым участком. Третья секция линии передачи проходит от нижней части зонда 100 до конца передающей части, которая проходит дальше конца, или дистальной части 112 измеримого участка. Третья секция линии передачи помещена здесь по выбору, чтобы обеспечить возможность импеданса, соответствующего измеряемой среде, как описано с дополнительными подробностями ниже.
Следует отметить, что наличие зонда 100, коаксиального по форме и частично наполненного тефлоном или подобным материалом, обеспечивает множественные преимущества, например, такие, но не ограниченные этим, которые обеспечивают постоянный импеданс до участка измерения и установление границ участка измерения. Дополнительно это позволяет зонду 100 быть размещенным горизонтально ниже уровня текучей среды, без множества отражений от текучей среды. Кроме того, эта конфигурация обеспечивает боковую изоляцию «влажный по сухому». Дополнительно к этому конфигурация также предоставляет механические средства для прикрепления удлиненной части 110 к датчику 130, обеспечивая, таким образом, более прочную (цельную) конструкцию.
В соответствии с первым примерным вариантом осуществления изобретения ветвь 120 зонда 100 выполнена по форме наподобие буквы S. Следует отметить, что форма ветви может отличаться от формы, описанной здесь. Эта раскрытая здесь форма является подходящей благодаря контуру ветви 120, дающей возможность зонду 100 опираться на край входа в топливный бак, такого как на крыле самолета, в то время как удлиненная часть 110 зонда 100 проходит внутри топливного бака, а датчик 130 остается снаружи топливного бака. Следует отметить, однако, что ветвь 120 может быть выполнена в других формах, чтобы соответствовать местоположению топливного бака, для которого используется зонд 100. Следует также отметить, что изогнутая форма ветви 120 дает возможность бокового расположения зонда 100 внутри бака. Альтернативно, ветвь 120 может быть проводом, или зонд 100 может даже не содержать ветвь 120, но вместо этого иметь прямое соединение от датчика 130 к удлиненной части 110.
Датчик 130 соединен с ближайшей частью 124 ветви 120. Лучшая иллюстрация датчика 130 приведена на фиг.2 и фиг.3, где фиг.2 является видом зонда 100 в поперечном разрезе, а фиг.3 является видом зонда 100 в разрезе, где каждая часть зонда 100 показана отдельно, как до сборки. В соответствии с настоящим вариантом осуществления датчик 130 соединен с ближайшей частью 124 ветви 120 посредством втулки 132. Втулка 132 соединена с ближайшей частью 124 ветви 120 и с корпусом 134 датчика 130. Как показано на фиг.3, втулка 132 может быть соединена с ветвью 120 посредством охватываемого/охватывающего («папа»/«мама») соединения, содержащего первое О-образное кольцо 138 втулки между ними с тем, чтобы обеспечить воздухонепроницаемое уплотнение между втулкой 132 и ветвью 120 для предотвращения утечки жидкой среды из бака. Конечно, вместо этого могут использоваться другие типы соединения между втулкой 132 и ветвью 120.
Втулка 132 соединена с корпусом 134, завершая, таким образом, соединение между корпусом 134 и ветвью 120. Соединение между втулкой 132 и корпусом 134 может быть обеспечено многими способами, такими, например, но без ограничения, как использование последовательности винтов 142 втулки 132 и второго О-образного кольца 144 втулки.
В то время как форма корпуса 134 не играет важной роли, корпус 134 в действительности обеспечивает закрытие для многочисленных деталей. Как показано на фиг.2 и фиг.3, ряд печатных плат (PCBs) расположены внутри корпуса 134. В частности, первая РСВ 150, вторая РСВ 170 и третья РСВ 190 расположены внутри корпуса 134. Первая РСВ 150 является РСВ передачи питания. Первая РСВ 150 содержит источник электропитания, обеспечивающий, таким образом, электропитание для зонда 100. Электрические компоненты на РСВ 150 сделаны для предотвращения распространения высокоэнергетических сигналов в текучую среду.
Вторая РСВ 170 является цифровой РСВ, содержащей цифровую логику на ней, такую, без ограничения, как процессор, такой, но без ограничения, как цифровой процессор 172 сигналов DSP. Функциональные возможности, выполняемые РСВ 172 и расположенные там другой цифровой логикой, описаны подробно ниже со ссылкой на фиг.4 и другие цифры. Следует отметить, что настоящее описание относится к использованию РСВ, но следует отметить, что это только в целях примера и что может быть дополнительно установлен любой процессор.
Третья РСВ 190 является аналоговой РСВ, имеющей аналоговые схемы передатчика и приемника для обеспечения возможности зонду 100 передавать и принимать сигналы. Функциональные возможности, выполняемые аналоговой схемой, описаны подробно ниже со ссылкой на фиг.5.
Первая РСВ 150, вторая РСВ 170 и третья РСВ 190 установлены с многоярусным размещением с рядом монтажных винтов 146, удерживающих РСВ 150, 170, 190 в положении внутри корпуса 134. Крышка 160 также предусмотрена для герметизации содержимого датчика 130 внутри корпуса 134. Следует отметить, что соединитель 162 датчика частично расположен внутри корпуса 134 датчика. Соединитель 162 датчика обеспечивает интерфейс для соединения зонда 100 с интерфейсом самолета.
В соответствии с альтернативным вариантом осуществления изобретения схема подачи питания, логические схемы передачи и приема и цифровые логические схемы могут быть все расположены на одной и той же РСВ или на больше или меньше чем трех РСВ.
Как упомянуто выше, фиг.4 является схематичной диаграммой, иллюстрирующей также функциональные возможности и логику, определяемые цифровой РСВ 170. Фиг.5 также является схематичной диаграммой, иллюстрирующей также функциональные возможности и логику, определяемую аналоговой РСВ 190. Ниже следует описание датчика 130 конкретно для второй РСВ 170 и третьей РСВ 190.
Фиг.5 показывает пример основного варианта создания аналоговых каналов передачи и приема. Цифровой процессор 172 сигналов (DSP), как показано на фиг.4, предусмотрен для сканирования, слежения и анализа связанных данных. Сигнал синхронизации от DSP 172 (фиг.4) подается на вход А (фиг.5) и используется для инициирования импульса передачи и для синхронизации приемника с импульсом передачи на аналоговой РСВ 190. Этот сигнал активирует передатчик 192 для подачи импульса возбуждения вниз по ветви 120. Импульс проходит в нижнем направлении по удлиненной части 110 весь путь к дистальному концу удлиненной части 112. Получающееся в результате отражение от дистального конца 112 проходит назад и захватывается приемником 194. Этот сигнал фильтруется и буферизируется посредством низкочастотного буфера 195 и передается в DSP 172 для преобразования в цифровой сигнал и для его анализа через выход D.
Тот же самый синхронизирующий сигнал, который используют для инициирования передачи импульса, также предоставляется приемнику 194. В приемнике 194 синхронизирующий сигнал является смещенным по фазе (задержанным) фазорегулятором 196 на величину, которой управляет DSP 172 (фиг.4) на входе В. Импульс приемника, следовательно, задерживается DSP 172 (фиг.4) и выполняет пространственное сканирование участка удлиненной части 110.
Фактическая величина задержки между импульсом передатчика и импульсом приемника обнаруживается детектором 198 задержки и посылается обратно в качестве напряжения DC в DSP 172 через выход С. Это дает возможность DSP 172 замкнуть контур, обеспечивающий DSP 172 возможностью иметь полный контроль функции сканирования. Таким образом, определенные неоднородности могут быть просканированы или прослежены по желанию.
Функция передатчика 192 выполняется элементами транзистора Q1, резистора R48, конденсатора С5 и резистора R7. Транзистор Q1 здесь действует в качестве переключателя для подачи энергии, хранимой в конденсаторе С5, в линию передачи. Резистор R7 служит для разъединения передатчика 192 от приемника 194. Функции приемника 194 выполняют элементы приемника (резистора) R36, диода D2, конденсатора С6, резистора R8, конденсатора С7, транзистора Q2 и резистора R55. Резистор R55 и резистор R8 обеспечивают путь зарядки конденсатора С6. Транзистор Q2 служит в качестве переключателя для подачи энергии, хранимой в конденсаторе С6, в резистор R8, включая, таким образом, диод D2, через конденсатор С7. Конденсатор С7, в свою очередь, заряжается и сохраняет напряжение, имеющееся в линии передачи, что также называют взятием замеров линии передачи.
На фиг.4 показан цифровой DSP 170. DSP 172 посылает синхронизирующий сигнал для активации передатчика 192 и приемника 194 через выход А. Величина задержки управляется DSP 172 через сигнал цифроаналогового преобразователя (ЦАП) 180, посланного через выход В на аналоговую РСВ 190.
Величина задержки между импульсами приемника 194 и передатчика 192 воспринимается аналого-цифровым преобразователем (АЦП) ADC1 175 через напряжение на вход С и преобразуется в цифровую величину для считывания DSP 172. DSP 172 использует этот сигнал для определения задержки между передатчиком 192 и приемником 194 и регулирует управляющий выходной сигнал задержки в целях отслеживания замкнутой цепи.
Другой аналоговый сигнал, поданный обратно в DSP 172, содержит колебательный сигнал отражения от удлиненной части 110 зонда (вход D). Этот сигнал подается в аналогово-цифровой преобразователь ADC2 (174). Из преобразователя сигнал подается в цифровой форме в DSP 172 для анализа.
Автоматическое регулирование усиления дискретного приемника
Следует отметить, что из-за различных внешних факторов может быть оказано обратное воздействие на амплитуду сигнала от приемника 194. Это может привести к погрешностям в определении уровня. В соответствии с альтернативным вариантом осуществления изобретения эти факторы воздействия компенсируются увеличением амплитуды импульса возбуждения пропорционально с выходным сигналом передатчика 192. В частности, выходной сигнал в D (фиг.5), полученный во время осуществления выборки известной величины, подается в фильтр 193 нижних частот, пример которого проиллюстрирован на фиг.8. Предпочтительно фильтр 193 нижних частот расположен отдельно от приемника 194 и передатчика 192, но все еще внутри датчика 130. Получаемая в результате величина DC добавляется к заранее фиксированному смещению, усиливается и добавляется к -Vee на фиг.5 (или вычитается). Посредством изменения -Vee можно изменять амплитуду импульса передачи, следовательно, осуществляется компенсирование за счет уменьшения (увеличения) сигнала в D в результате изменения диода.
Сегментированный диэлектрик, применяемый для согласования импеданса зонда для TDR измерения уровня
Как упомянуто выше, ветвь 120 зонда 100 заполнена диэлектриком, имеющим известный импеданс. При наличии ветви 120 зонда 100, заполненной диэлектриком, имеющим известный импеданс, предотвращается поступление измеряемой текучей среды в ветвь 120 зонда 100. Альтернативно, если текучая среда получает возможность попадания в ветвь 120 зонда, это приводит к неоднородностям в сигнале возбуждения, переданном от датчика 130 к ветви 120, к удлиненной части 110 зонда 100. В частности, каждый раз, когда сигнал возбуждения встречает текучую среду, при этом происходит нарушение непрерывности в сигнале. Следовательно, выгодной является минимизация нарушения непрерывности при условии, что никакая жидкость не поступит в ветвь 120 зонда 100. В соответствии с настоящим изобретением минимизирование нарушения непрерывности выполняется, например, заполнением ветви 120 диэлектриком, имеющим известный импеданс. В соответствии с предпочтительным вариантом осуществления изобретения импеданс диэлектрика подобен импедансу воздуха или импедансу текучей среды, уровень которой при этом определяют.
В соответствии с настоящим зондом 100 сигнал возбуждения сначала проходит из датчика 130 к верхней части измеримой секции зонда 100. Если импеданс первой секции линии передачи, а именно ветви 120 зонда 100, соответствует импедансу первой среды, такому как импеданс воздуха, то не будет нежелательного нарушения непрерывности между первой секцией зонда и второй секцией зонда, а именно удлиненной части 110.
Нарушение непрерывности на границе между средой, такое как между воздухом и текучей средой, для которой определяется уровень, вызывает желаемое отражение сигнала возбуждения для обработки датчиком 130. В соответствии с конструкцией, как упомянуто выше, это отражение не будет создавать каких-либо ненужных дополнительных отражений при импедансе, подходящем верхней части и нижней части зонда 100. Часть сигнала возбуждения проходит далее во вторую среду, а именно текучую среду, уровень для которой определяют, к дистальному концу 112 удлиненной части 110, которая находится в текучей среде.
Импеданс третьей секции линии передачи регулируют для соответствия величине импеданса второй среды, а именно импедансу текучей среды. Таким образом, импеданс в верхней части зонда 100 соответствует воздуху, в то время как импеданс в нижней части зонда 100 соответствует импедансу текучей среды, уровень для которой определяют. Следует отметить, что согласование импеданса может осуществляться датчиком 130 посредством конфигурации зонда 100 или регулированием диэлектрического материала. Сигнал возбуждения проходит в третью секцию линии передачи без какого-либо нарушения непрерывности, делающего нечетким определение уровня.
Поэтому в конструкции зонда 100 желательно иметь подобный диэлектрик материала, используемого для заполнения ветви 120, воздуха и текучей среды. Сходства диэлектриков приводят в результате к меньшим нарушениям непрерывности в сигнале возбуждения, передаваемом от датчика 130 через ветвь 120 зонда 100 в удлиненную часть 110 зонда 100 и в текучую среду, уровень которой при этом определяют.
Измерение температуры текучей среды с использованием времени перемещения
Физические характеристики и функциональные возможности настоящего зонда 100 позволяют зонду 100 обеспечить измерение температуры текучей среды. Этот процесс описан подробно ниже и выполнен с помощью DSP 172. В частности, в процессах, где наблюдается измерение уровня текучей среды, часто желательно также знать температуру текучей среды. Знание температуры текучей среды может оказаться полезным для управления процессом или корректировки относительно самих показаний уровня текучей среды для компенсации объема текучей среды, измененного из-за температуры. Настоящий зонд 100 снижает прежнюю потребность в использовании отдельного, независимого датчика температуры и вместо этого объединяет свойства датчика для измерения температуры со свойствами измерения уровня зонда 100, в результате приводя к зонду с меньшим количеством проводов и меньшим вмешательством в процесс и, следовательно, большей надежности.
Зная диэлектрические постоянные текучих сред (например, воздуха и газа) при различных температурах, температура измеряемой текучей среды может быть выведена посредством измерения фактической диэлектрической постоянной текучей среды и сравнения измеренной фактической диэлектрической постоянной с диаграммой, имеющей известные величины диэлектрических постоянных. Как пример можно рассмотреть, например, углеводородный флюид. Скорость распространения сигнала в текучей среде, имеющей диэлектрическую постоянную ε1 при определенной температуре, показана уравнением 1.
В уравнении 1 С - скорость света.
При изменении температуры текучей среды ее диэлектрик также изменяется до ε2.
Отношения между скоростями распространения могут быть представлены уравнением 2.
В уравнении 2 ε1 является диэлектрической постоянной при температуре, например, 25°С, а ε2 является диэлектрической постоянной при неизвестной температуре Т. Уравнение 2 можно переписать как уравнение 3, представленное ниже.
Зная ε1 и V1 и используя таблицу поиска ε при различных температурах для данной конкретной текучей среды, находим фактическую температуру Т текучей среды. Альтернативно, как показано уравнением 4, если известна фактическая длина столбца L текучей среды и воспринятая длина L′ (время прохождения, измеренное от поверхности текучей среды до донной части бака), можно вычислить диэлектрическую постоянную для текучей среды при текущей температуре (независимо от ее значения), εТ:
Посредством поиска εТ и ε в таблице поиска (ε - диэлектрическая постоянная данной текучей среды при 25°С) можно определить температуру текучей среды.
Следует отметить, что альтернативные варианты осуществления изобретения могут быть предложены для измерения температуры в месте нахождения для компенсации диэлектрических изменений из-за температуры. Как пример, в соответствии со вторым примерным вариантом осуществлениям изобретения в часть измерения зонда 100 может быть помещен терморезистор в прямом контакте с измеряемой текучей средой. Главной характеристикой терморезистора является способность терморезистора изменять импеданс в соответствии с температурой, которой он подвергается. Датчик 130 зонда 100 затем определяет изменение импеданса терморезистора и коррелирует изменение импеданса с температурой текучей среды.
Альтернативно, в соответствии с третьим примерным вариантом осуществления изобретения терморезистор также может быть расположен в пределах части измерения, однако схемы для восприятия импеданса терморезистора, возможно, нужно соединить с зондом 100.
Определение уровня текущей среды с помощью времени прохождения импульса через текучую среду
Импульс, переданный в линию передачи, частично или полностью отражается обратно к порту передачи всякий раз, когда изменяется характеристический импеданс линии передачи. Характеристический импеданс линии передачи изменяется с диэлектриком. Различные конфигурации линии передачи (коаксиальный кабель, параллельный провод и т.д.) имеют различные соотношения для изменений характеристического импеданса в различных диэлектриках. Для данной конфигурации линии передачи изменения диэлектрика в линии передачи вызывают предсказуемые изменения в характеристическом импедансе.
Система для измерения уровня, зонд 100, разработана иметь линию передачи, которая проходит через различные диэлектрики. Линия передачи при этом имеет весьма значительное изменение импеданса в ее конце (разомкнутая цепь или цепь короткого замыкания). Это весьма значительное изменение импеданса в линии передачи вызывает очень сильное отражение на своем конце.
Система для измерения уровня могла бы иметь перемещение импульса в линии передачи, которая помещена в среде известного диэлектрика. Часть расстояния, которое проходит импульс, будет находиться в воздухе (воздушном диэлектрике), другая часть расстояния проходится в среде (диэлектрике среды). Используя уравнение 1, можно определить скорость распространения для каждой среды. Полное проходимое расстояние (длина линии передачи) известно. Посредством анализа формы отраженного сигнала может быть измерено время прохождения от начала линии передачи, через оба диэлектрика, до большого рассогласования импеданса в конце линии передачи. Расстояние, пройденное в среде, может быть выведено при помощи нижеприведенного уравнения 5, которое предполагает, что скорость в воздухе является С.

В уравнении 4:
D - полное расстояние передачи через воздух и через среду. Это длина или высота среды;
С - скорость света;
εm - диэлектрик среды;
Т - полное время для импульса или сигнала для прохождения как через часть линии передачи воздушного диэлектрика, так и через часть диэлектрика линии передачи до конца упомянутой линии передачи;
Н - высота среды - расстояние, проходимое только в части диэлектрика среды линии передачи; и
sqrt - квадратный корень.
Определение диэлектрической постоянной в TDR, где температура известна
Фиг.6 является блок-схемой, иллюстрирующей пример удлиненной части 110 зонда 100 в целях определения диэлектрической постоянной текучих сред, где температура текучей среды известна. Длина L, которая является длиной удлиненной части 110, известна, в то время как длина L1, которая является длиной удлиненной части 110, содержащей в себе воздух, и длина L2, которая является длиной удлиненной части 110, содержащей в себе текучую среду, измерены с помощью времени отражений, также упомянутых здесь как время прохождения.
В соответствии с настоящим изобретением зонд 100 также может быть использован для определения диэлектрических постоянных текучих сред, где температура текучей среды известна. Этот процесс описан подробно ниже и выполнен DSP 172. Если температура текучей среды известна, диэлектрическая постоянная текучей среды может быть выведена посредством измерения воспринимаемой длины коаксиальной трубки (удлиненной части 110), погруженной в текучую среду. Так как фактическая длина трубки или удлиненной части 110 известна, диэлектрическая постоянная текучей среды может быть вычислена при температуре из отношения воспринятой длины и фактической длины столбиков текучей среды (L2 на фиг.6). На уравнение 4 может быть сделана ссылка для дальнейшего пояснения.
Посредством использовании таблицы поиска температурной и диэлектрической постоянной εt для этой специфической текучей среды диэлектрическая постоянная ε может быть определена при 25°С. Кроме того, теоретическая диэлектрическая постоянная ε сравнивается с фактической диэлектрической постоянной εt выше, чтобы обнаружить возможное загрязнение в текучей среде, если эти две не являются одинаковыми.
Уровень поиска и захвата
В соответствии с первым примерным вариантом осуществления изобретения, для того чтобы обеспечить быстрое сканирование уровня текучей среды с уменьшенным временем обработки датчика, зонд 100 приспособлен для отслеживания уровня текучей среды. В частности, в настоящем зонде 100 для измерения уровня текучей среды необходимо анализировать формы сигналов отражения очень высокой скорости для определения позиционных изменений в диэлектрическом материале, вызванных изменениями в уровне текучей среды. Фиг.7 является блок-схемой 300, иллюстрирующей способ, применяемый зондом 100 для сканирования и захвата уровня текучей среды в соответствии с первым примерным вариантом осуществления изобретения.
Следует отметить, что любые описания процесса или блоков в блок-схемах должны быть истолкованы как представление модулей, сегментов, частей кода или этапов, которые содержат одну или более инструкций для выполнения определенных логических функций в процессе, а альтернативные варианты выполнения включены в рамки настоящего изобретения, в котором функции могут быть выполнены не в порядке от показанного или описанного, включая по существу выполняемые одновременно или в обратном порядке в зависимости от задействованных функциональных возможностей, как это понимают опытные специалисты в области техники настоящего изобретения.
Вместо непрерывного сканирования всей длины удлиненной части 110 для определения уровня, как показано в блоке 302, настоящий зонд 100 сканирует всю длину удлиненной части 110 за один раз использования сигнала возбуждения, чтобы посмотреть, где находится текучая среда в удлиненной части 110 зонда 100, что также называют текущим уровнем текучей среды. При одном способе анализа высокоскоростных колебательных сигналов, таких как сигнал опроса (возбуждения), представленных датчиком 130, необходимо применять дискретизирующую систему с наложением сигналов, для создания более медленного колебательного сигнала «равной длительности». Зонд 100 может сохранять форму исходного очень быстрого периодического колебательного сигнала и изменять форму сигнала на намного более медленную скорость. Зондирование очень узкой точки выборки с повторяющейся формой сигнала выполняет это. Каждый раз, когда высокоскоростной колебательный сигнал повторяется, одна узкая выборка колебательного сигнала принимается датчиком 130. Строб-импульс задерживается с регулярными интервалами на время для выполнения отбора следующего фрагмента высокоскоростного сигнала. После многих колебательных сигналов образцы объединяются датчиком 130 в более замедленное представление исходного высокоскоростного сигнала, который является подходящим для обработки DSP 172.
Посредством анализа формы сигнала равной продолжительности может быть локализовано интересующее отражение. Интересующее отражение представляет текущий уровень текучей среды удлиненной части (110) зонда 100. Как показано в блоке 304, как только положение уровня текучей среды в данный момент определено, уровень текучей среды отслеживается посредством создания представления высокоскоростного колебательного сигнала равной длительности только вблизи от того, где интересующее отражение было расположено в предыдущих циклах. Как показано в блоке 306, периодически синхронизация интервала сканирования регулируется для удерживания интересующего отражения в пределах интервала сканирования.
Сканирование только там, где уровень текучей среды может быть ожидаемым, и отслеживание уровня очень сокращают время, требуемое датчику для обработки. Уменьшение продолжительности обработки данных датчиком обеспечивает намного более быструю скорость отклика системы для определения уровня текучей среды. В результате это также приводит к менее дорогостоящей системе и к меньшему потреблению энергии.
Искробезопасный коаксиальный TDR с низкой RF передачей/восприимчивостью для применения в самолете
Использование металлической коаксиальной трубки (комбинация ветви 120 и удлиненной части 110) предлагает уникальное преимущество низких радиочастотных излучений для устройства TDR. Это является чрезвычайно важным для использования в средствах транспортировки по воздуху, где приборно-измерительное оборудование самолета является чрезвычайно чувствительным к излучаемому шуму. Это также делает менее вероятным прием радиочастоты TDR (восприимчивость).
Это имеет дополнительное преимущество в случае погружения в легковоспламеняющиеся текучие среды. Электрическая искра может воспламенить текучую среду, в которую погружена линия передачи. Покрывая внутренний проводник удлиненной ветви 110 посредством наружной металлической трубы, предотвращается возникновение искры между внутренним проводником и в котором содержится текучая среда. Посредством электрического соединения наружной трубки с баком при этом предотвращается разность электрических потенциалов между баком и удлиненной трубой (110), уменьшая, таким образом, возможность искры.
Количество энергии, поданной в измеряемое топливо, ограничивается конденсатором С5 (фиг.5). Конденсатор предотвращает поступление постоянного тока в топливо. Единственная доставляемая энергия находится в виде импульса. Этот импульс имеет ограниченную энергию, обусловленную емкостью конденсатора С5. При сохранении низкой емкости количество энергии, поступающей в текучую среду, удерживается ниже критического количества, необходимого для воспламенения.
Другим элементом безопасности является добавление ограничителей выбросов напряжения к источнику электропитания, который питает зонд 100 и входы передачи данных зонду 100. Они ограничивают количество энергии, которая может достигнуть топливо в случае короткого замыкания или изменения напряжения в переходном процессе.
Следует подчеркнуть, что вышеописанные варианты осуществления настоящего изобретения являются просто возможными примерами выполнения, изложенными просто для ясного понимания принципов изобретения. Много изменений и модификаций могут быть выполнены в вышеописанных вариантах осуществления изобретения, по существу без отступления от духа и принципов изобретения. Все такие модификации и изменения предназначены для включения здесь в объем этого раскрытия и настоящего изобретения и при этом защищены нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА | 2009 |
|
RU2496127C2 |
| Устройство для электромагнитного каротажа буровой скважины | 1981 |
|
SU1223849A3 |
| ЗОНД И СИСТЕМА ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2022 |
|
RU2808057C1 |
| МУЛЬТИПАРАМЕТРИЧЕСКИЙ ВОЛНОВОДНЫЙ РАДАРНЫЙ ЗОНД | 2015 |
|
RU2710516C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ КОМПОЗИТНЫХ МАТЕРИАЛОВ С ИСПОЛЬЗОВАНИЕМ РАДИОЧАСТОТНОГО ОТРАЖЕНИЯ | 2011 |
|
RU2540411C2 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР С КОМБИНАЦИЕЙ ЛИНЗ | 2019 |
|
RU2760517C1 |
| ВОЛНОВОДНО-МИКРОПОЛОСКОВЫЙ ПЕРЕХОД | 2015 |
|
RU2600506C1 |
| ПОЛОСОВОЙ РЕЖЕКТОРНЫЙ ФИЛЬТР, ТЕЛЕКОММУНИКАЦИОННАЯ БАЗОВАЯ СТАНЦИЯ И ТЕРМИНАЛ, ДУПЛЕКСЕР И СПОСОБ СОГЛАСОВАНИЯ ИМПЕДАНСОВ | 2009 |
|
RU2497272C2 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В РАБОТАЮЩЕМ ПОД ДАВЛЕНИЕМ СОСУДЕ УСТАНОВКИ СИНТЕЗА МОЧЕВИНЫ | 2018 |
|
RU2767720C2 |
| КОРПУС АКУСТИЧЕСКОГО КАРОТАЖНОГО ИНСТРУМЕНТА | 2005 |
|
RU2373391C2 |
Предлагается система и способ для точного измерения уровня текучей среды в сосуде. В целом система содержит удлиненную часть, являющуюся коаксиальной трубкой, имеющей осевое отверстие, ветвь, являющуюся коаксиальной по форме, и датчик, содержащий передатчик, способный к созданию и передаче электромагнитного импульса возбуждения для прохождения по удлиненной части и ветви, и приемник для приема отраженного импульса, где ближайший конец удлиненной части соединяется с дистальным концом штанги так, чтобы образовать волновод для электромагнитного импульса, предоставленного датчиком, при этом ветвь заполнена диэлектриком, имеющим известный импеданс. Технический результат - создание точного, надежного и безопасного способа и устройства измерения количества текучей среды в сосуде. 2 н. и 19 з.п. ф-лы, 8 ил.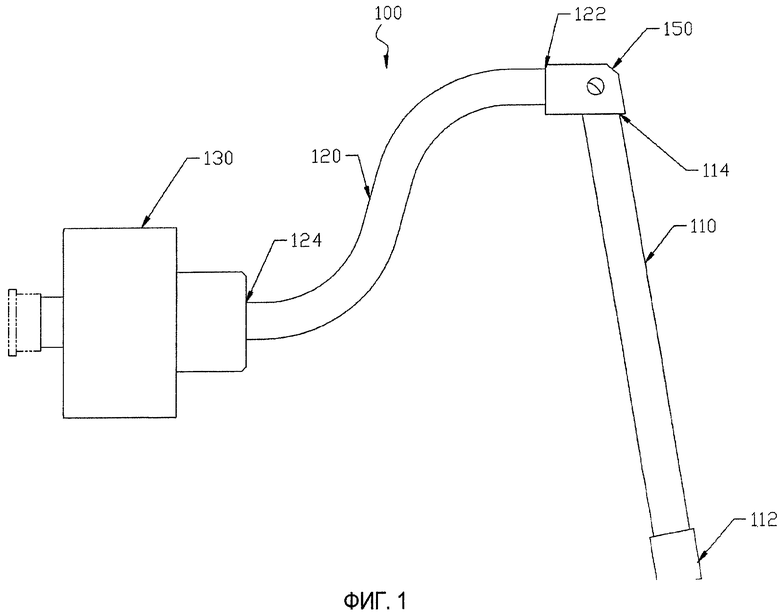
1. Система для точного измерения уровня текучей среды в сосуде, содержащая:
удлиненную часть, являющуюся коаксиальной трубкой, имеющей осевое отверстие;
ветвь, являющуюся коаксиальной по форме; и
датчик, содержащий передатчик, способный создавать и передавать электромагнитный импульс возбуждения для прохождения по удлиненной части и ветви, и приемник для приема отраженных импульсов, в которой ближайший конец удлиненной части соединяется с дистальным концом ветви таким образом, чтобы создавать волновод для электромагнитного импульса, обеспечиваемого датчиком, при этом ветвь заполнена диэлектриком, имеющим известный импеданс.
2. Система по п.1, в которой удлиненная часть и наружный кожух ветви изготовлены из проводящего материала, имеющего известный импеданс.
3. Система по п.1, в которой импеданс диэлектрика подобен импедансу воздуха или импедансу измеряемой текучей среды.
4. Система по п.1, в которой датчик дополнительно содержит схему источника питания, цифровую логику и аналоговую схему.
5. Система по п.4, в которой электрические компоненты, включенные в схему источника питания, предназначены предотвращать распространение высокоэнергетических сигналов в текучую среду, измеряемую системой.
6. Система по п.4, в которой аналоговая схема дополнительно содержит передатчик и приемник.
7. Система по п.4, в которой цифровая логика дополнительно содержит процессор, где процессор дополнительно содержит:
логику, сконфигурированную для инициирования передатчика для отправки электромагнитного импульса возбуждения; и логику, сконфигурированную для синхронизации приемника к передаваемому импульсу.
8. Система по п.7, в которой инициирование передатчика для отправки электромагнитного импульса возбуждения выполнено синхронизирующим сигналом от процессора, при этом тот же самый синхронизирующий сигнал отправлен в приемник.
9. Система по п.7, в которой процессор дополнительно содержит логику, сконфигурированную для определения температуры текучей среды посредством измерения фактической диэлектрической постоянной текучей среды и сравнения измеренной фактической диэлектрической постоянной текучей среды со списком текучих сред, имеющих известные величины диэлектрических постоянных.
10. Система по п.7, дополнительно содержащая терморезистор для определения температуры текучей среды, в которой процессор способен определять диэлектрическую постоянную текучей среды и коррелировать диэлектрическую постоянную к температуре текучей среды.
11. Система по п.7, в которой процессор дополнительно содержит логику, сконфигурированную для определения уровня текучей среды посредством использования времени пролета электромагнитного импульса возбуждения к концу удлиненной части.
12. Система по п.7, в которой процессор способен к определению диэлектрической постоянной текучей среды, где температура текучей среды известна, причем процессор дополнительно содержит:
логику, сконфигурированную для измерения воспринимаемой длины удлиненной части, погруженной в текучую среду; и
логику, сконфигурированную для вычисления диэлектрической постоянной текучей среды из соотношения воспринятой длины и реальной длины удлиненной части, имеющей в себе текучую среду.
13. Система по п.7, в которой процессор дополнительно содержит:
логику, сконфигурированную для определения текущего уровня текучей среды; и
логику, сконфигурированную для отслеживания текущего уровня текучей среды посредством удерживания текущего уровня текучей среды в пределах интервала сканирования, где согласование по времени интервала сканирования отрегулировано для удерживания текущего уровня текучей среды в пределах интервала.
14. Система по п.1, дополнительно содержащая фильтр нижних частот и связанную логику для изменения амплитуды электромагнитного импульса возбуждения для компенсации изменения сигнала в результате изменения диода.
15. Система по п.1, в которой ветвь имеет форму S.
16. Система по п.1, в которой ветвь представляет собой коаксиальный кабель.
17. Система по п.1, в которой система дополнительно содержит соединитель для подсоединения системы к схеме самолета.
18. Система по п.1, в которой удлиненная часть, ветвь и датчик содержат компоненты, которые уменьшают восприимчивость к радиоизлучению или передаче.
19. Способ для точного измерения уровня текучей среды в сосуде посредством использования устройства с линией передачи и датчиком, в котором датчик содержит передатчик, способный создавать и передавать электромагнитный импульс возбуждения для прохождения линии передачи, и дискретизирующий приемник с наложением сигналов для преобразования высокоскоростных отраженных колебательных сигналов в колебательный сигнал "равной длительности" с замедленной скоростью для обработки с использованием способа, содержащего этапы:
сканирования длины линии передачи, которая помещена частично или полностью в текучую среду, чтобы посмотреть, где текучая среда находится по линии передачи, также называемого текущим уровнем текучей среды;
отслеживания уровня текучей среды посредством идентифицирования точек обнаружения уровня текучей среды в пределах колебательного сигнала «равной длительности» с замедленной скоростью, выводимого интервалом сканирования дискретизирующего приемника с наложением сигналов; и
регулирования интервала сканирования дискретизирующего приемника с наложением сигналов для отслеживания точек обнаружения в пределах представления с равной длительностью по времени отражения импульса, где точки обнаружения в колебательном сигнале отражения представляют собой положение в колебательном сигнале отражения импульса, представляющем уровень текучей среды.
20. Способ по п.19, в которой способ точного измерения уровня текучей среды вместе с тем используется для обнаружения дополнительной точки интереса временного колебательного сигнала с замедленной скоростью.
21. Способ по п.20, в которой дополнительная точка интереса является концевой частью линии передачи.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 20040007061 A1, 15.01.2004 | |||
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ КРИОГЕННОЙ ЖИДКОСТИ В СОСУДЕ И УРОВНЕМЕР ДЛЯ КРИОГЕННЫХ ЖИДКОСТЕЙ | 2003 |
|
RU2249796C1 |
| УРОВНЕМЕР | 2005 |
|
RU2289795C1 |

