Область техники
Изобретение относится к измерению, выполняемому посредством волноводного радара (guided wave radar, GWR) и применяемому для детектирования уровня текучей среды в замкнутом резервуаре (танке).
Уровень техники
При применении в резервуаре зонд GWR-радара вводят в резервуар сверху и погружают в содержащиеся в резервуаре текучие среды, после чего зонд используется для передачи (Тх) направленных электромагнитных сигналов, которые посылаются передатчиком через зонд в одну или несколько из этих сред. Когда электромагнитные волны встречаются с текучей средой, происходит их отражение (Rx), обусловленное различием соответствующих диэлектрических постоянных, и часть энергии отразится в этом месте обратно в виде отраженной волны, а остальная часть волны продолжит свое распространение уже в текучей среде, пока не дойдет до границы другой текучей среды, имеющей другую диэлектрическую постоянную, до дна резервуара или до конца зонда. Все отражения детектируются приемником.
После отражения волн в обратном направлении от поверхности текучих сред, находящихся внутри резервуара, происходит их прием. Скорость волны и интенсивность ее отражения зависят от диэлектрической постоянной текучей среды (текучих сред), через которую (которые) проходит волна. После приема отраженных сигналов их подвергают обработке, в ходе которой определяют, в какой степени они смещены во времени. Полученные смещения преобразуют в соответствующее расстояние, после чего вычисляют уровень текучей среды, содержащейся в резервуаре.
На точность вычисления уровня могут повлиять несколько факторов, в том числе ошибки при передаче или приеме электромагнитной волны, неправильный монтаж проводов или соединительных труб, колебания давления или температуры внутри резервуара, изменение скорости потока текучей среды внутри резервуара, изменение концентрации текучей среды, изменение плотности текучей среды или слишком низкая диэлектрическая постоянная текучих сред (таких как нефть, у которой диэлектрическая постоянная примерно в восемьдесят раз меньше, чем у воды). В результате неточного вычисления инициируется некорректное сообщение об уровнях текучих сред в резервуаре, а это может привести к ложным аварийным сигналам и к непредусмотренным прерываниям технологического процесса, в котором задействован данный резервуар.
Предпринимались попытки устранить эти погрешности. В частности, чтобы вычислить положение нескольких уровней в резервуаре, применялись радарные системы, посылающие через один или несколько приемопередатчиков (трансиверов) несколько сопоставляемых между собой радарных сигналов. Однако такие системы, хорошо детектируя погрешность одного радарного компонента, остаются чувствительными по отношению к другим перечисленным выше факторам системы, вызывающим искажение.
В других попытках устранения погрешностей радара добавлялись индивидуальные датчики давления, не интегрированные в систему и расположенные в фиксированных местоположениях. Но такие датчики, помещенные в резервуар, имеют ограниченную точность и ограниченную полезность. Кроме того, реализация такого технического решения затруднительна и затратна, поскольку размещение датчиков вне конструкции зонда требует дополнительных изменений конструкции резервуара.
Раскрытие изобретения
Согласно одному из вариантов изобретения мультипараметрическая система детектирования уровня текучей среды содержит: волноводный радарный зонд с первым датчиком, составляющим интегральную часть зонда и обеспечивающим формирование первого сигнала, представляющего собой функцию первого детектированного параметра; передатчик, способный посылать направленные микроволновые импульсы по зонду вниз; приемник, способный принимать отраженные микроволновые импульсы, и процессор для формирования результата измерения уровня текучей среды с использованием для этого сигнала, полученного от первого датчика, и разницу во времени между испусканием импульса и приемом отраженного импульса.
Согласно другому своему варианту мультипараметрическая система детектирования уровня текучей среды содержит волноводный радарный зонд, в состав которого входят: передатчик, способный посылать направленные микроволновые импульсы по зонду вниз; приемник, способный принимать отраженные микроволновые импульсы; группу датчиков, составляющих интегральные части зонда и предназначенных для формирования сигналов, представляющих собой функции детектированных параметров, и процессор, использующий для получения на выходе результатов измерений принятые сигналы и количество времени, прошедшего с момента испускания направленного микроволнового импульса до момента приема отраженного микроволнового импульса.
Изобретение относится также к способу передачи направленных волновых импульсов вниз по зонду в первую текучую среду. Направленные волновые импульсы отражаются от первой текучей среды с последующим детектированием. Кроме того, способ включает операцию формирования первого сигнала, представляющего собой функцию первого детектированного параметра, причем данный сигнал формируется первым датчиком, составляющим интегральную часть зонда. Затем получают на выходе результат измерения, используя для этого первый детектированный параметр и количество времени, прошедшего с момента испускания направленных волновых импульсов до момента приема отраженных волновых импульсов.
Краткое описание чертежей
На фиг. 1 схематично проиллюстрирован первый вариант мультипараметрической системы детектирования уровня согласно изобретению.
На фиг. 2 представлена блок-схема, иллюстрирующая мультипараметрическую систему детектирования уровня согласно изобретению.
На фиг. 3 приведен график, иллюстрирующий результаты измерений уровня, полученные с предлагаемой волноводной радарной системой детектирования уровня.
Осуществление изобретения
Согласно техническим решениям, предлагаемым изобретением, детектирование уровня текучей среды может быть выполнено более точно, если в волноводный радарный зонд интегрировать один или более датчиков. В таком варианте, в добавление к передаче одной направленной волны или нескольких таких волн, детектированию их отражения и вычислению уровня, проводимому на основе детектирования волны (волн), внутри резервуара посредством одного или более датчиков оцениваются дополнительные параметры. Таким образом, этими датчиками обеспечивается получение дополнительных параметров, которые, в совокупности с измерением, проводимым волноводным радаром, позволяют выполнить более точное и надежное измерение уровня текучей среды внутри резервуара. Кроме того, интегрирование этих дополнительных датчиков в систему зонда снижает стоимость системы и затраты на ее установку, а также расходы на обслуживание резервуара.
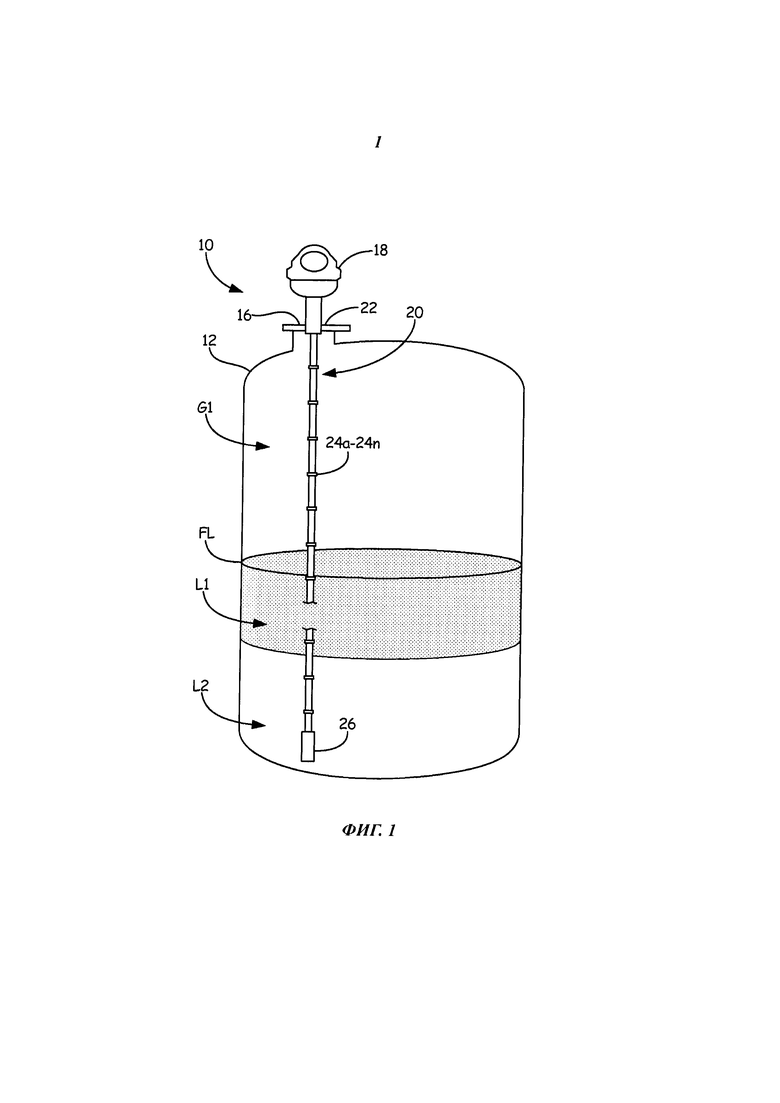
На фиг. 1 схематично представлен вариант изобретения, иллюстрирующий мультипараметрическую систему 10 детектирования уровня (далее - МСДУ 10), предназначенную для детектирования уровня текучей среды (fluid level, FL) внутри резервуара 12 с использованием нескольких изменяющихся параметров (факторов). В данном случае в резервуаре 12 содержатся первая жидкость (liquid 1, L1), вторая жидкость L2 и третий текучий компонент в виде газа (gas 1, G1). Уровень FL соответствует границе раздела между третьей (газообразной) текучей средой G1 и первой жидкостью L1 (жидкостью, расположенной внутри резервуара 12 относительно другой жидкости сверху). Резервуар 12 имеет разделительную монтажную поверхность 16, к которой крепится МСДУ 10.
МСДУ 10 имеет головку 18, узел 20 зонда (далее - зонд 20) и собственную монтажную поверхность 22. В состав зонда 20 входят датчики 24а-24n и груз 26, а в состав головки 18 - волноводная радарная система (GWR-система), система обслуживания датчиков и другие внутренние контуры (см. фиг. 2).
МСДУ 10 своей монтажной поверхностью 22 установлена на резервуаре 12 с приведением поверхности 22 в контакт с монтажной поверхностью 16 резервуара. Зонд 20 введен в резервуар 12 и проходит через газ G1, первую жидкость L1 и вторую жидкость L2, к которым обращены прикрепленные к зонду 20 датчики 24а-24n. Вблизи конца зонда 20 закреплен груз 26. К зонду 20 механически присоединена головка 18. Предусмотрена также возможность использовать жесткий зонд, причем в таком альтернативном варианте груз 26 может не потребоваться.
МСДУ 10 проводит вычисление, измерение, а также мониторинг положения уровня FL текучей среды внутри резервуара 12 и сообщает полученный результат по назначению. Более конкретно, зондом 20 замеряется уровень первой жидкости L1 (например нефти) внутри резервуара 12. В резервуаре 12 могут содержаться также вторая жидкость L2 (в частности вода) и газ G1 (такой как воздух), сосредоточенный над жидкостями L1 и L2. Зонд 20 оснащен несколькими средствами детектирования параметров, обеспечивающими точное измерение уровня FL первой жидкости L1. Соответствующие измерения проводятся зондом 20, а их результаты передаются в расположенные в головке 18 GWR-систему и систему обслуживания датчиков, где выполняются вычисления и мониторинг, результаты которых поступают, в завершение процесса, к пользователям через различные коммуникационные средства.
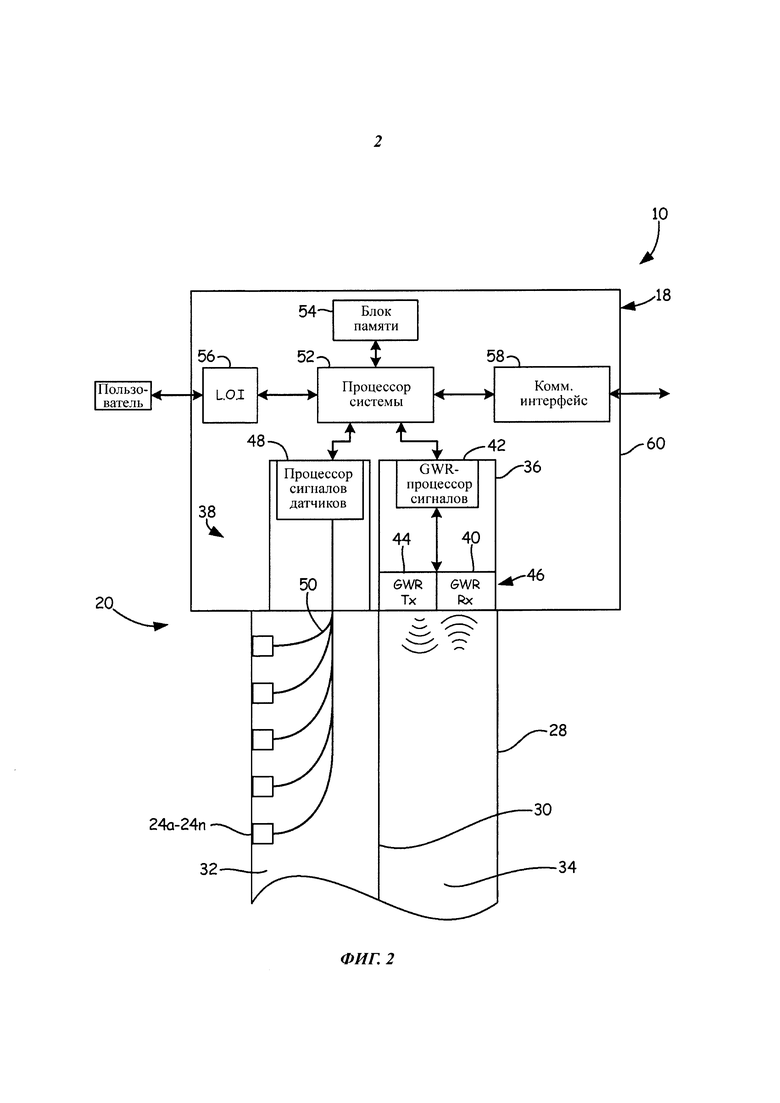
На фиг. 2 представлена блок-схема, иллюстрирующая один из вариантов мультипараметрической системы по изобретению, выполняющей детектирование уровня. МСДУ 10 имеет головку 18 и зонд 20, который содержит датчики 24а-24n и имеет корпус 28, а также перегородку 30, разделяющую его на участок 32, выделенный для датчиков, и на участок 34 для GWR. В головке 18 находятся GWR-система 36 и система 38 обслуживания датчиков. В GWR-систему 36 входят GWR-процессор 42 сигналов и GWR-трансивер 46, содержащий GWR-передатчик 44 и GWR-приемник 40.
Кроме того, в головке 18 содержится система 38 обслуживания датчиков, с которой связаны датчики 24а-24n и в которую входят процессор 48 сигналов, поступающих от датчиков, и линии 50 для подачи этих сигналов в процессор. Предусмотрена возможность снабдить систему 38 также и другими электрическими компонентами, требуемыми для ее функционирования. Головка 18 содержит, кроме того, процессор 52 системы, блок 54 памяти, интерфейс локального оператора (local operator interface, L.O.I) 56 и коммуникационный интерфейс 58. Все эти компоненты находятся внутри головки 18 и заключены в ее корпус 60.
Как показано на фиг. 1, МСДУ 10 установлена на резервуаре 12 в том месте, где в него введен зонд 20, прикрепленный к головке 18 и проходящий вниз через газ G1, первую жидкость L1 и вторую жидкость L2. К зонду 20 прикреплены датчики 24а-24n, подключенные к системе 38 их обслуживания, а конкретно - к процессору 48 сигналов, поступающих от датчиков по линиям 50.
Зонд 20 подсоединен также к GWR-системе 36, в которую входит GWR-трансивер 46, состоящий из GWR-передатчика 44 и GWR-приемника 40, которые, в свою очередь, подсоединены к GWR-процессору 42 сигналов. Процессоры 42 и 48 электрически соединены (индивидуальными проводниками) с процессором 52 системы, а он, в свою очередь, электрически соединен с блоком 54 памяти, а также с коммуникационным интерфейсом 58 и с L.O.I 56. Кроме того, предусмотрена возможность подсоединить коммуникационный интерфейс 58 к внешнему коммуникационному устройству посредством соответствующего электрического соединения или беспроводным образом. Проводники, соединяющие различные электрические компоненты внутри МСДУ 10, могут быть выполнены в виде проводного контура, кабельного контура, печатной схемы или проводника какого-то другого типа, способного переносить электронный или электромагнитный сигнал.
МСДУ 10 проводит вычисление, измерение и мониторинг уровня текучей среды в резервуаре 12 (см. фиг. 1) и передает результат измерения по назначению. Уровень первой жидкости L1 внутри резервуара замеряется зондом 20, который снабжен несколькими средствами детектирования параметров, обеспечивающими точное измерение уровня FL первой жидкости L1 в резервуаре 12. Первое такое средство подключено через GWR-систему 36.
Исходный параметр определяется GWR-системой 36 посредством испускания и приема микроволновых импульсов соответственно GWR-передатчиком 44 и GWR-приемником 40, входящими в состав GWR-трансивера 46. Эти импульсы посылаются GWR-передатчиком 44, когда он получает соответствующую команду от GWR-процессора 42 сигналов. Волновые импульсы, сгенерированные GWR-передатчиком 44, направляются вниз по выделенному для GWR участку 34 зонда 20 в резервуар 12, проходя далее через газ G1, первую жидкость L1 и вторую жидкость L2. Микроволновое излучение отражается обратно у границ раздела сред, где внутри резервуара между смежными текучими средами имеет место изменение диэлектрической постоянной. Отраженные импульсы детектируются GWR-приемником 40, после чего GWR-трансивер 46 направляет их в GWR-процессор 42 сигналов. Процессор 42 вычисляет разницу во времени между переданным импульсом и принятым отраженным импульсом и корректирует результат с учетом многочисленных отражений, детектированных GWR-приемником 40. Эти многочисленные отражения могут быть обусловлены наличием внутри резервуара 12 границ раздела смежных текучих сред, различающихся своими диэлектрическими постоянными.
Дополнительный параметр (или дополнительные параметры) детектируется/детектируются системой 38 обслуживания датчиков. В этой системе в число датчиков 24а-24n могут входить датчики температуры, датчики давления, датчики расхода потока, датчики вибраций, датчики ускорения (акселерометры), различные датчики другого назначения, а также комбинации всех перечисленных датчиков или некоторых из них. Дополнительный параметр (дополнительные параметры) детектируется/детектируются датчиками 24а-24n и передается/передаются в процессор 48 сигналов, поступающих от датчиков, причем он по отношению к принятому сигналу датчика (принятым сигналам датчиков) выполняет несколько функций. В случае необходимости сигнал (сигналы) будет (будут) отфильтровываться и усиливаться. Затем сигнал датчика (сигналы датчиков) преобразуется (преобразуются) из аналоговой формы в цифровую.
После обработки, проведенной процессором 48 сигналов, поступающих от датчиков, и GWR-процессором 42 сигналов, параметры передаются в процессор 52 системы, который анализирует их и выполняет расчеты с целью определения значения измеренного уровня. Вычисленные значения сохраняются в блоке 54 памяти и сопоставляются процессором 52 со значениями, поступившими в блок 54 ранее. Предусмотрена возможность проводить в процессоре 52 и другие вычисления. После такой обработки результаты вычислений и сопоставлений приобретают форму, пригодную для передачи пользователю через L.O.I 56 или через коммуникационный интерфейс 58 посредством внешней коммуникационной системы.
Преимущество системы МСДУ 10 обеспечивается сочетанием ее свойств. Прежде всего, для применения МСДУ 10 требуются очень незначительные изменения резервуара. Поскольку различные датчики МСДУ 10 составляют с зондом 20 единое целое, для того чтобы подготовить резервуар к введению зонда 20 и МСДУ 10, нужны очень небольшие изменения его конструкции. В варианте, проиллюстрированном на фиг. 1, для решения этой задачи нужно выполнить только одно сквозное отверстие в стенке резервуара.
Сведение изменений в резервуаре к минимуму обеспечивает для пользователей сразу несколько преимуществ, в частности снижение начальной стоимости резервуара для конечного пользователя и сокращение времени освоения новых резервуаров. Когда требуется индивидуальная модификация стандартного резервуара или резервуар по индивидуальному заказу, время, необходимое производителю для выполнения подобных заказов, как правило, увеличивается. При уменьшении количества сквозных отверстий требуется меньше переделок и, соответственно, сокращаются время изготовления резервуара и его поставки заказчику. Это позволяет уплотнить графики выполнения работ, экономя тем самым время и средства. Кроме того, в результате сведения изменений резервуара к минимуму упростится обслуживание резервуара и зонда, причем чем меньше количество сквозных отверстий, тем меньше требуется заменяемых деталей и сервисных ноу-хау.
Далее, уменьшение количества сквозных отверстий означает, что снижается вероятность поломок резервуара. Для выполнения в резервуарах таких отверстий обычно требуются сварочные операции и уплотнители, предотвращающие утечку продукта, содержащегося в резервуаре. В этих местах конструкция резервуара обычно наиболее ослаблена, и поэтому они наиболее подвержены дефектам. В результате уменьшения количества сквозных отверстий ослабленных участков в резервуаре будет меньше, т.е. уменьшится вероятность дорогостоящих поломок. Другие достоинства МСДУ 10 наглядно проиллюстрированы графиком, приведенным на фиг. 3.
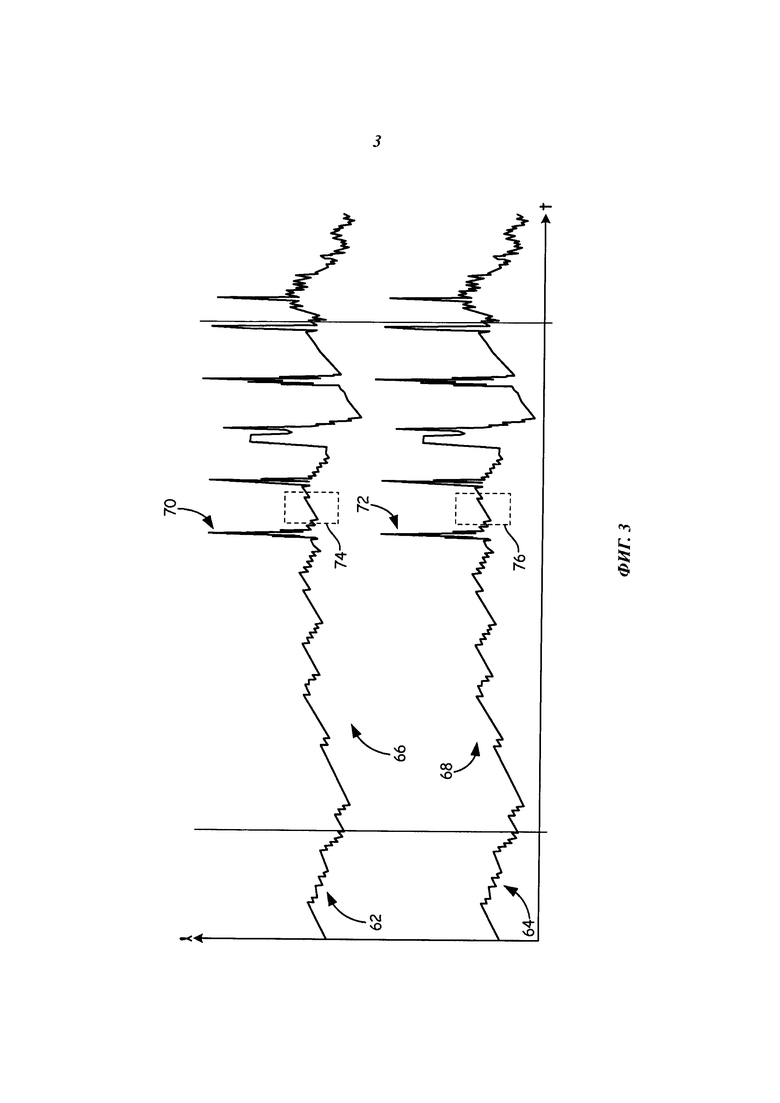
На фиг. 3 приведен график, иллюстрирующий результаты измерений уровня, полученные в предлагаемой волноводной радарной системе детектирования уровня. В данном графике по осям х и у отложены соответственно время (t) и высота (I) уровня, причем на оси у начальная точка (О) и необозначенная верхняя точка отвечают уровням (I) в пустом и заполненном резервуаре соответственно. Время (t) отсчитывается на оси х слева направо.
Кривые 62 и 64 представляют собой графическое изображение отражений волны, детектированных в течение выбранного интервала времени для содержащихся в резервуаре 12 первой жидкости L1 и второй жидкости L2 соответственно. Обе волны детектируются GWR-системой 36. Участки 66 и 68 соответствуют детектированию волн во времени в процессе нормального функционирования, т.е. когда уровень в резервуаре 12 повышается и понижается медленно. Пики 70 и 72 указывают на быстрое повышение и быстрое понижение детектируемого уровня соответственно первой жидкости L1 и второй жидкости L2. Участки 74 и 76 тоже соответствуют детектированию волн во времени в процессе нормальной операции, но в промежутке между быстрыми повышениями уровня.
Для GWR-системы проблемными являются пики 70 и 72. Им предшествуют участки 66 и 68, означающие, что в не до конца заполненном резервуаре уровень повышается и понижается медленно, т.е. ожидаемым образом. Сразу же за пиками 70 и 72 следуют участки 74 и 76, которые также свидетельствуют об ожидаемом поведении уровней в не до конца заполненном резервуаре. Поскольку перечисленные участки прилегают к пикам 70 и 72 с обеих сторон, можно заключить, что данные пики являются результатом ошибочных вычислений уровня или некорректных измерений, проведенных GWR-системой.
Преимущество МСДУ 10 состоит в том, что данная система повышает точность измерения уровня. Повлиять на точность детектирования волн GWR-системой могут несколько факторов, в том числе отклонения при передаче или приеме радарной волны, колебания давления или температуры внутри резервуара, изменение скорости потока текучей среды внутри резервуара, изменение концентрации текучей среды или изменение ее плотности. Данные воздействия могут вызвать появление таких погрешностей, как представленные на фиг. 3 пики 70 и 72, наличие которых, если эту ошибку не исправить, может проявиться в виде некорректных вычислений уровня, что, в свою очередь, может привести к неправильному сообщению о положении уровней внутри резервуара. Это приведет к проблемам, поскольку не соответствующим действительности сообщением о полном заполнении резервуара могут инициироваться ложные аварийные сигналы и непредусмотренные прерывания технологического процесса, в котором задействован данный резервуар, причем такие перерывы могут привести к большим затратам.
Детектируя несколько параметров, МСДУ 10 повышает точность измерения уровня, а комбинация радарного детектирования волн с измерением температуры, давления, потока, вибрации, силового воздействия или каких-то других параметров, характеризующих условия внутри резервуара 12, позволяет проводить более сложные вычисления для более точного определения уровня в резервуаре. Например, датчиком 24а может быть датчик усилия, который детектирует смещение зонда 20, в варианте по фиг. 1 выполненного нежестким. Под воздействием этого смещения GWR-система может выполнить неправильное измерение уровня, например соответствующее пикам 70 и 72 на фиг. 3.
В данном примере датчик усилия может детектировать усилие или ускорение зонда 20 в одном или более направлениях. Для зонда 20 смещение этого типа может быть вызвано силами, возникающими вследствие чрезмерно высоких скоростей объемных потоков или чрезмерно высоких давлений, создаваемых подаваемой в резервуар текучей средой. Если детектировано смещение, его можно учесть в расчетах и сопоставить с сохраненными ранее значениями уровня текучей среды, чтобы определить, является ли реальной детектированная флуктуация уровня, такая как пики 70 и 72 по фиг. 3, или это результат силового воздействия на зонд, оказываемого влияниями потоков в системе. В данном примере, в котором зонд выполнен гибким, это особенно полезно, поскольку гибкий зонд более подвержен изгибанию под воздействием описанных выше сил. Результатом такого подхода является уменьшение количества мешающих ошибочных уровней текучей среды и нежелательных прерываний процесса, что выражается в экономии времени и средств.
В следующем примере в числе датчиков 24а-24n может быть использован датчик давления. В таком варианте процессор 52 системы получает возможность учитывать изменения давления в резервуаре, сопоставляя полученные данные с аналогичными значениями, сохраненными ранее в блоке 54 памяти. После этого изменение давления может быть использовано для обновления значения плотности текучей среды, содержащейся в резервуаре 12, а затем - при вычислении уровня, проводимом на основе детектированного момента отражения микроволнового излучения. В результате повышается точность измерения уровня. Таким же образом можно улучшить измерение, если используется датчик температуры.
По сравнению с системами, известными из уровня техники, МСДУ 10 обеспечивает повышение точности также и другими способами. Как указывалось выше, комбинация радарного детектирования волн с измерением температуры, давления, потока, вибраций и с применением акселерометра или с измерением каких-то других параметров, характеризующих условия внутри резервуара 12, позволяет проводить более сложные вычисления для более точного определения уровня в резервуаре. Кроме того, повышение точности можно обеспечить, комбинируя радарное детектирование волн с измерением сразу нескольких параметров, характеризующих перечисленные выше условия в резервуаре (или с измерением одного и того же параметра, но в нескольких местах резервуара).
В частности, если в качестве датчиков 24а и 24b используются соответственно датчик давления и датчик температуры, процессор 52 системы получает возможность учитывать изменения давления и температуры в системе для первой жидкости L1, содержащейся в резервуаре, сопоставляя полученные данные с аналогичными значениями, сохраненными ранее в блоке 54 памяти. После этого данные изменения могут быть использованы для обновления значения плотности первой жидкости L1, а затем это новое значение можно применить при вычислении уровня, проводимом на основе детектированного момента отражения микроволнового излучения. Использование обновленного и точного значения плотности обеспечит повышение точности измерения уровня, поскольку, учитывая одновременно температуру и давление текучей среды внутри резервуара (а не каждый из этих параметров по отдельности), можно более точно определить плотность текучей среды.
В следующем примере в качестве датчиков 24а и 24b могут быть использованы соответственно датчик усилия и датчик давления. Это позволяет посредством датчика 24а детектировать смещение зонда 20 и, кроме того, обновить в процессоре 52 системы значение плотности первой жидкости L1 после того, как на основе показаний давления, полученных от датчика 24b, будет проведено вычисление изменения плотности. Как указывалось выше, это означает, что, кроме возможности повышения точности измерения уровня, появляется также возможность детектировать и устранять мешающие ошибочные высокие уровни текучей среды, тем самым обеспечивая повышение точности и надежности всей системы.
В следующем примере для каждой позиции 24а-24n может быть использован датчик давления (или датчик, способный детектировать и давление, и температуру), причем все эти датчики размещают вдоль зонда 20 с пространственным разделением друг от друга по вертикали. В данном случае МСДУ 10 способна детектировать уровень предварительно, используя для этого сохраненное ранее значение плотности текучих сред и вычисленную разнесенность импульсов во времени. После этого или одновременно процессор 52 системы получает возможность считывать показания всех датчиков давления, размещенных относительно зонда 20 на разных высотах. Зная высоту расположения каждого датчика давления, процессор 52 может затем вычислить градиент плотности для всех текучих сред, находящихся в резервуаре. Значения плотности, с внесением поправок, могут быть сопоставлены с ее предыдущими градиентами, хранящимися в блоке 54 памяти, а затем они обновляются в вычислении уровня. При соблюдении этих условий вычисление уровня может быть выполнено с повышенной точностью. Предусмотрена возможность провести подобные вычисления для варианта с замещением этих датчиков на датчики температуры или с добавлением датчиков температуры. Дальнейшее повышение точности и надежности можно обеспечить, добавив описанные выше датчики ускорения. Кроме того, в данной конструкции могут быть использованы и другие датчики, способные детектировать уровень текучей среды, такие как датчики электропроводности.
Изобретение было описано только на примерах некоторых вариантов, однако, для специалистов будет понятно, что возможны различные изменения, в том числе замена используемых компонентов на их эквиваленты, если эти изменения и эквиваленты не выходят за границы объема изобретения. В дополнение к этому, возможны многочисленные модификации, позволяющие адаптировать к предлагаемым положениям конкретную ситуацию или используемый материал, не выходя за пределы основного объема изобретения. Таким образом, подразумевается, что изобретение не ограничено приведенными конкретными вариантами и включает в себя все варианты, находящиеся в границах прилагаемой формулы.
Хотя изобретение было описано со ссылками на предпочтительные варианты осуществления, для специалистов будет очевидно, что в его форму и детали могут быть внесены изменения, не выходящие за границы идеи и объема изобретения.
Предложена мультипараметрическая система (10) детектирования уровня текучей среды, содержащая: волноводный радарный зонд (20), снабженный вмонтированными в него датчиками (24а-24n), которые предназначены для формирования сигналов, передатчик (44), передающий направленные микроволновые импульсы по зонду (20) вниз, приемник (40), принимающий отраженные микроволновые импульсы, и процессор (52), формирующий результат измерения уровня текучей среды и использующий для этого сигналы датчиков и разницу во времени между испусканием импульса и приемом отраженного импульса. 3 н. и 14 з.п. ф-лы, 3 ил.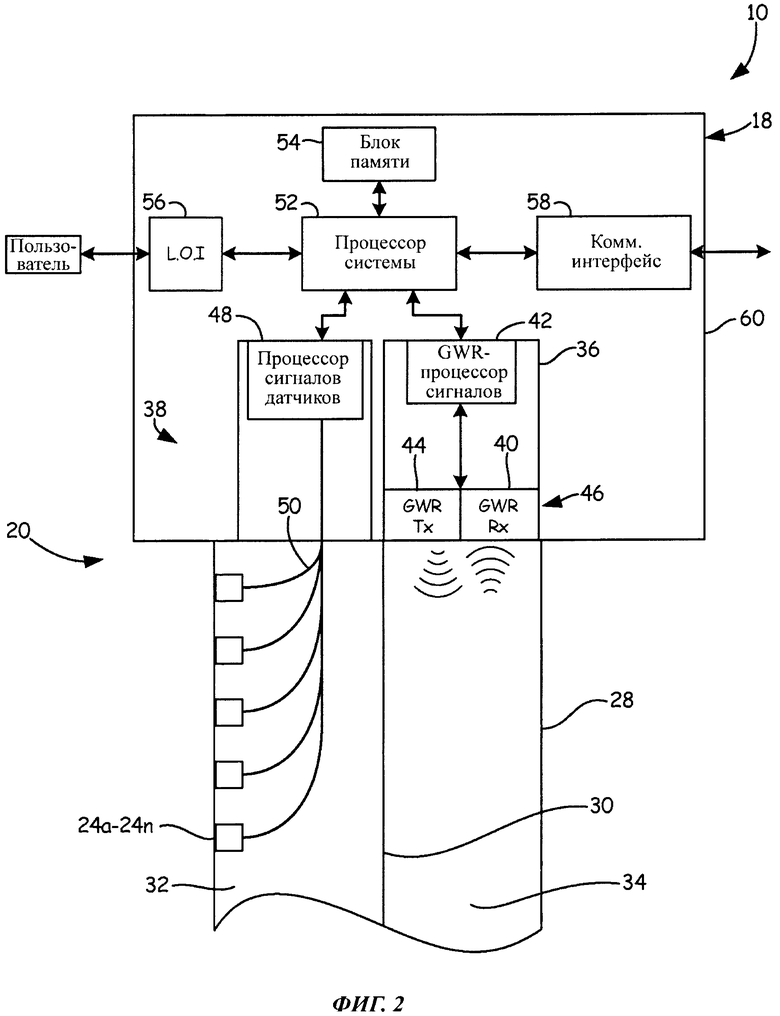
1. Мультипараметрическая система детектирования уровня текучей среды, содержащая:
- нежесткий волноводный радарный зонд,
- первый датчик, составляющий интегральную часть зонда и предназначенный для формирования первого сигнала, являющегося функцией первого детектированного параметра, причем первый датчик представляет собой датчик усилия, выполненный с возможностью детектирования смещения зонда из-за потока текучей среды, при этом первый детектированный параметр представляет собой усилие или ускорение зонда,
- передатчик, способный направлять микроволновые импульсы по зонду вниз,
- приемник, способный принимать отраженные микроволновые импульсы,
- процессор для формирования результата измерения уровня текучей среды с использованием для этого первого детектированного параметра и разницы во времени между испусканием импульса и приемом отраженного импульса.
2. Система по п. 1, дополнительно содержащая датчик давления, датчик температуры или акселерометр.
3. Система по п. 1, дополнительно содержащая второй датчик, составляющий интегральную часть зонда и предназначенный для формирования второго сигнала, являющегося функцией второго детектированного параметра, причем процессор способен формировать результат измерения уровня текучей среды с использованием для этого первого и второго детектированных параметров, а также разницы во времени между испусканием импульса и приемом отраженного импульса.
4. Система по п. 3, в которой второй датчик представляет собой датчик давления.
5. Система по п. 3, в которой второй датчик представляет собой датчик температуры.
6. Система по п. 3, в которой второй датчик представляет собой датчик ускорения.
7. Система по п. 1, в которой датчик усилия представляет собой трехосный акселерометр.
8. Мультипараметрическая система детектирования уровня текучей среды, содержащая:
- нежесткий волноводный радарный зонд,
- передатчик, способный посылать направленные микроволновые импульсы по зонду вниз,
- приемник, способный принимать отраженные микроволновые импульсы,
- группу датчиков, составляющих интегральные части зонда и предназначенных для формирования сигналов, каждый из которых является функцией соответствующего детектированного параметра, причем группа датчиков включает датчик усилия, выполненный с возможностью детектирования смещения зонда из-за потока текучей среды, при этом сигнал датчика, сформированный указанным датчиком усилия, отражает усилие или ускорение зонда, и
- процессор, способный формировать выходной сигнал, соответствующий результату измерения уровня текучей среды и использующий для этого сигналы датчиков и количество времени, прошедшего с момента испускания направленного микроволнового импульса до момента приема отраженного микроволнового импульса.
9. Система по п. 8, в которой в группу датчиков входит один или более датчиков давления.
10. Система по п. 9, в которой в группу датчиков входит один или более датчиков температуры.
11. Система по п. 9, в которой датчик усилия представляет собой трехосный акселерометр.
12. Система по п. 8, в которой в группу датчиков входит один или более датчиков температуры.
13. Система по п. 12, в которой в группу датчиков входит датчик ускорения.
14. Система по п. 13, в которой датчик ускорения представляет собой трехосный акселерометр.
15. Способ определения уровня текучей среды в резервуаре, включающий следующие операции:
- посылают по нежесткому зонду вниз, в первую жидкость направленные волновые импульсы, которые отражаются от первой жидкости,
- детектируют волновые импульсы, отраженные от первой жидкости,
- формируют первый сигнал, который является функцией первого детектированного параметра, причем первый сигнал формируют посредством первого датчика, составляющего интегральную часть зонда, а первый детектированный параметр представляет собой усилие или ускорение зонда, вызванные потоком текучей среды, и
- формируют на выходе результат измерения, используя для этого первый детектированный параметр и количество времени, прошедшего с момента испускания направленных волновых импульсов до момента приема отраженных волновых импульсов.
16. Способ по п. 15, дополнительно включающий следующие операции:
- формируют второй сигнал, который является функцией второго детектированного параметра, причем второй сигнал формируют посредством второго датчика, составляющего интегральную часть зонда, и
- формируют на выходе результат измерения, используя для этого первый детектированный параметр, второй детектированный параметр и количество времени, прошедшего с момента испускания направленного микроволнового импульса до момента приема отраженного микроволнового импульса.
17. Способ по п. 16, в котором второй сигнал представляет собой сигнал, характеризующий давление, сигнал, характеризующий температуру, или сигнал, характеризующий усилие.
| US 6198424 B1, 06.03.2001 | |||
| ПОЧТОВЫЙ ЯЩИК | 1925 |
|
SU3300A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 6148681 A1, 21.11.2000 | |||
| УРОВНЕМЕР | 2012 |
|
RU2491519C1 |

