Изобретение относится к электротехнике и может быть использовано при проектировании систем генерирования электрической энергии для питания потребителей переменного тока в летательных аппаратах.
Известны авиационные системы генерирования электрической энергии, содержащие генератор переменного тока, вход которого присоединен к валу приводного двигателя через расцепитель с электромагнитным управлением. Выход генератора подключен к статическому преобразователю частоты (напряжения), управляемому микропроцессором (1).
Наиболее близким к изобретению является способ управления системой генерирования электрической энергии, содержащей генератор переменного тока, вход которого присоединен к валу приводного двигателя через расцепитель с электромагнитным управлением, причем выход генератора подключен к статическому преобразователю энергии нестабильной частоты и напряжения в энергию стабильной частоты (2). Управление системой осуществляют с помощью нескольких микропроцессоров, реализующих заданный режим регулирования выходных параметров, защиту блоков при внутренних и внешних авариях.
Недостатком известных технических решений (1 и 2) является возможность сбоев в работе микропроцессоров как из-за аварий внутри этих блоков, так и из-за воздействия внешних факторов, таких, как радиация (особенно γ-излучения), электромагнитные импульсы повышенной частоты и т.д. Сбой программы может привести к аварийным изменениям качества (увеличению или уменьшению частоты) выходного напряжения статического преобразователя. Уровень отрицательного влияния сбоя работы микропроцессоров можно снизить за счет введения индивидуальных каналов защиты для каждого из микропроцессоров либо дублирования их функций с помощью введения дополнительных блоков. Однако такая методика недостаточно эффективна при сбоях, например, в результате γ-излучения или влияния электромагнитных импульсов, при этом сбой программного обеспечения может произойти во всех микропроцессорах одновременно. Аналогичные сбои работы системы управления преобразователем могут произойти при нарушениях работы узлов питания микропроцессоров. Выходом из данной ситуации может быть дублирование микропроцессоров, выполняющих одни и те же функции при организации индивидуального питания блоков. Однако такое решение приводит к ухудшению масса-габаритных показателей аппаратуры и ее резкому удорожанию.
Техническим результатом, которого можно достичь при использовании изобретения, является обеспечение защиты потребителей электроэнергии от изменения требуемого качества выходного напряжения (при воздействии возможных отрицательных внешних и внутренних факторов) при оптимальных масса-габаритных показателях системы генерирования.
Технический результат достигается за счет того, что в способе управления системой генерирования электрической энергии, заключающемся в том, что на выходе генератора, подключенного к приводному валу авиадвигателя через расцепитель, формируют напряжение переменного тока нестабильной частоты, которое преобразуют с помощью статического преобразователя в напряжение переменного тока стабильной частоты, необходимое для питания потребителей электроэнергии, при этом на выходных выводах узла управления статическим преобразователем, формируют сигналы в соответствии с законом регулирования системы, задаваемым несколькими микропроцессорами, для контроля рабочего состояния которых на их контрольных выводах формируют одинаковые меандры напряжения заданной ширины и частоты, параметры которых могут изменяться в зависимости от рабочего состояния микропроцессоров, при этом в каждой паре соседних микропроцессоров меандры сравнивают друг с другом и при отклонении параметров меандров друг от друга в, по меньшей мере, одной из пар микропроцессоров формируют сигнал на отключение блока питания от всех микропроцессоров на фиксированное минимальное время, за которое они могут восстановить нормальную работу, по истечении данного времени сигналы с контрольных выводов микропроцессоров вновь сравнивают друг с другом, и в случае отсутствия восстановления их нормальной работы через дополнительное фиксированное время на управляющем входе расцепителя формируют сигнал на отключение приводного вала авиадвигателя от генератора напряжения. При этом в устройстве для реализации способа управления системой генерирования электрической энергии, содержащем генератор напряжения переменного тока нестабильной частоты, входом подключенный к приводному валу авиадвигателя через расцепитель, а выходом - к статическому преобразователю напряжения, формирующему на нагрузочной шине напряжение переменного тока стабильной частоты, необходимое для питания потребителей электроэнергии, управляющий вход статического преобразователя напряжения подсоединен к выходу блока управления, входы которого присоединены к выходам микропроцессоров, предназначенным для формирования сигналов в соответствии с законом регулирования системы, контрольные выводы каждой пары соседних микропроцессоров, предназначенные для формирования сигналов контроля рабочего состояния микропроцессоров, присоединены к соответствующему узлу сравнения, выход которого подключен к одному из входов сумматора, выходом присоединенного к спусковому узлу, выполненному с возможностью возврата в исходное состояние с фиксированной задержкой, выход спускового узла подключен к входу управления ключа, включенного в цепь соединения микропроцессоров с их блоком питания, при этом выход сумматора подсоединен также к узлу дополнительной фиксированной задержки, выходом связанному с управляющим входом расцепителя, причем выход сумматора может быть присоединен дополнительно к выходу датчика напряжения, подключенному к блокам питания микропроцессоров и статического преобразователя напряжения.
В проанализированных источниках патентной информации не найдено сведений о подобном способе управления системой генерирования электрической энергии и реализующем его устройстве, что позволяет сделать вывод о соответствии данного решения критериям охраноспособности.
На чертеже представлена функциональная схема устройства, реализующего данный способ.
Устройство содержит приводной авиадвигатель 1, вал которого соединен через расцепитель 2 с генератором напряжения 3 переменного тока нестабильной частоты, выходом соединенного со статическим преобразователем 4 напряжения и частоты. Преобразователь 4 состоит из выпрямителя 5 и инвертора 6. Выход блока управления 7 подсоединен к управляющим цепям силовых ключей преобразователя напряжения 4, цепи питания которого присоединены к его блоку питания 8. Входы блока управления 7 подключены к выходам микропроцессоров 9, 10, 11, предназначенным для формирования сигналов в соответствии с законом регулирования системы. Выводы питания микропроцессоров 9, 10, 11 присоединены к блоку питания 12 через ключ 13. Для контроля рабочего состояния микропроцессоров 9, 10, 11 на их контрольных выводах формируют одинаковые меандры напряжения заданной ширины и частоты, параметры которых могут изменяться в зависимости от рабочего состояния микропроцессоров. Рабочее состояние основных функциональных узлов микропроцессов может отслеживаться, например, узлом контроля (встроенным в каждый микропроцессор), который формирует контрольных выводах сигнал, параметры которого (при сбое работы функциональных узлов) будут отличаться от первоначально заданных. Микропроцессоры 9-11 объединены между собой в замкнутое кольцо. Контрольные выводы каждой пары соседних микропроцессоров присоединены соответственно к узлу сравнения (встроенному в микропроцессор либо являющийся самостоятельным блоком), выход которого подключен к одному из входов сумматора 14. Выход сумматора 14 присоединен к спусковому узлу 15, выполненному с возможностью возврата в исходное состояние с фиксированной задержкой τ1. Выход спускового узла 15 подключен к входу управления ключа 13. Выход сумматора 14 подсоединен также к узлу дополнительной фиксированной задержки τ2 16 (построенному по типу узла 15), выход которого связан (например, через усилитель мощности) с управляющим входом расцепителя 2. Выход сумматора 14 может быть присоединен дополнительно к выходу датчика напряжения 17, подключенному к блокам питания микропроцессоров и статического преобразователя напряжения.
Устройство работает следующим образом
Генератор 3 преобразует механическую энергию приводного авиадвигателя 1 в электрическую энергию переменного тока нестабильной частоты и напряжения, которая посредством статического преобразователя напряжения и частоты 4, состоящего из выпрямителя 5 и инвертора 6, преобразуется в энергию требуемого качества напряжения и частоты, необходимую для питания потребителей. Данная энергия поступает на выходную шину системы электроснабжения, предназначенную для питания потребителей. На выходных выводах узла управления 7 статическим преобразователем, формируются сигналы в соответствии с законом регулирования системы, задаваемым несколькими микропроцессорами 9-11. С помощью тех же микропроцессоров осуществляется функция защиты потребителей, преобразователя 4 и генератора 3, сигнализации, прогнозирования отказов и т.д. Электропитание узлов 7 и 9-11 осуществляется от блоков 8 и 12. Для контроля рабочего состояния микропроцессоров 9-11 на их контрольных выводах формируют одинаковые меандры напряжения заданной ширины и частоты, параметры которых могут изменяться в зависимости от рабочего состояния микропроцессоров. В каждой паре соседних микропроцессоров меандры сравнивают друг с другом по ширине и частоте, а результат сравнения подают на сумматор 14. При отклонении параметров меандров друг от друга в, по меньшей мере, одной из пар микропроцессоров сумматор 14 выдает сигнал на отключение блока питания 12 от всех микропроцессоров (с помощью размыкания ключа 13) на фиксированное минимальное время τ1, за которое они могут восстановить нормальную работу. Данная функция реализуется с помощью спускового узла 15, выполненного с возможностью возврата в исходное состояние с фиксированной задержкой τ1. Если сбой работы произошел в одном из процессоров случайно (под воздействием внешних факторов) и является обратимым, то за время отключения питания (обычно 100 мкс) работоспособность схемы восстанавливается. По истечении данного времени сигналы с микропроцессоров вновь сравнивают друг с другом, и в случае отсутствия сигнала о восстановлении их нормальной работы (в течение времени τ2) на управляющем входе расцепителя 2 формируют сигнал на отключение приводного вала авиадвигателя 1 от генератора 3. Фиксированное время τ2 определяется параметрами спускового узла 16, который при поступлении сигнала с сумматора о продолжающейся неисправности в каком-либо из микропроцессоров выдает команду на отключение связи генератора с приводным валом авиадвигателя.
Чтобы при срабатывании сумматора 14 первоначально сработал узел 15 (для кратковременного отключения питания микропроцессоров), а только потом - узлы 16 и 2, минимальная выдержка времени τ1 должна быть намного меньше чем τ2.
Для повышения надежности работы (путем введения контроля состояния блоков питания 8 и 12) включен датчик напряжения 17, который при отклонении выходного напряжения этих блоков от минимально допустимого отключает расцепитель 2, разрывающий связь генератора с приводным валом авиадвигателя.
Таким образом, введение постоянного контроля работоспособности микропроцессоров позволяет защитить потребителей от изменения заданного качества поступающей к ним энергии даже при нарушениях работы узлов управления системой генерирования. При этом повышение качества выходной энергии произведено без значительных усложнений схемы и с минимальными затратами.
Благодаря высокому и стабильному качеству вырабатываемой системой электроэнергии при простоте схемы и низкой себестоимости, устройство может быть широко использовано, например, в самолетостроении.
Источники информации
1. «Электрический самолет: от идеи до реализации». - М.: Машиностроение, 2010 г., с.62-120.
2. Ж. «Силовая интеллектуальная электроника» №1, 2005 г., с.31-34.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2011 |
|
RU2482595C1 |
| СИСТЕМА ГЕНЕРИРОВАНИЯ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2527056C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2006 |
|
RU2314629C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2006 |
|
RU2314622C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2564987C1 |
| СПОСОБ ЭЛЕКТРОСТАРТЕРНОГО ЗАПУСКА АВИАЦИОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2566806C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭЛЕКТРИЧЕСКОЙ УСТАНОВКОЙ | 2006 |
|
RU2306663C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2004 |
|
RU2273945C1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ ИМПУЛЬСНОЙ НАГРУЗКИ | 2005 |
|
RU2305888C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2014 |
|
RU2565762C1 |
Изобретение относится к области электротехники и может быть использовано в самолетостроении. Техническим результатом является повышение качества выходной энергии без значительных усложнений схемы и с минимальными затратами. В способе управления системой генерирования в устройстве, содержащем генератор (3), авиадвигатель (1), статический преобразователь напряжения и частоты (4) на выходных выводах узла управления (7) формируются сигналы управления в соответствии с законом, задаваемым микропроцессорами (9-11), на контрольных выводах которых формируют одинаковые меандры напряжения заданной ширины и частоты, параметры которых могут изменяться в зависимости от рабочего состояния микропроцессоров. В каждой паре соседних микропроцессоров меандры сравнивают друг с другом по ширине и частоте. Результат сравнения подают на сумматор (14). При отклонении параметров меандров друг от друга в, по меньшей мере, одной из пар микропроцессоров, сумматор (14) выдает сигнал на отключение блока питания (12) от всех микропроцессоров на фиксированное минимальное время τ1
, за которое они могут восстановить нормальную работу. При случайном сбое работы, который произошел в одном из процессоров, и его обратимости за время отключения питания работоспособность схемы восстанавливается. Сигналы с микропроцессоров вновь сравнивают. При отсутствии информации о восстановлении их нормальной работы через фиксированное время τ2 расцепитель (2) отключает приводной вал авиадвигателя (1) от генератора (3). 2 н. и 1 з.п. ф-лы, 1 ил.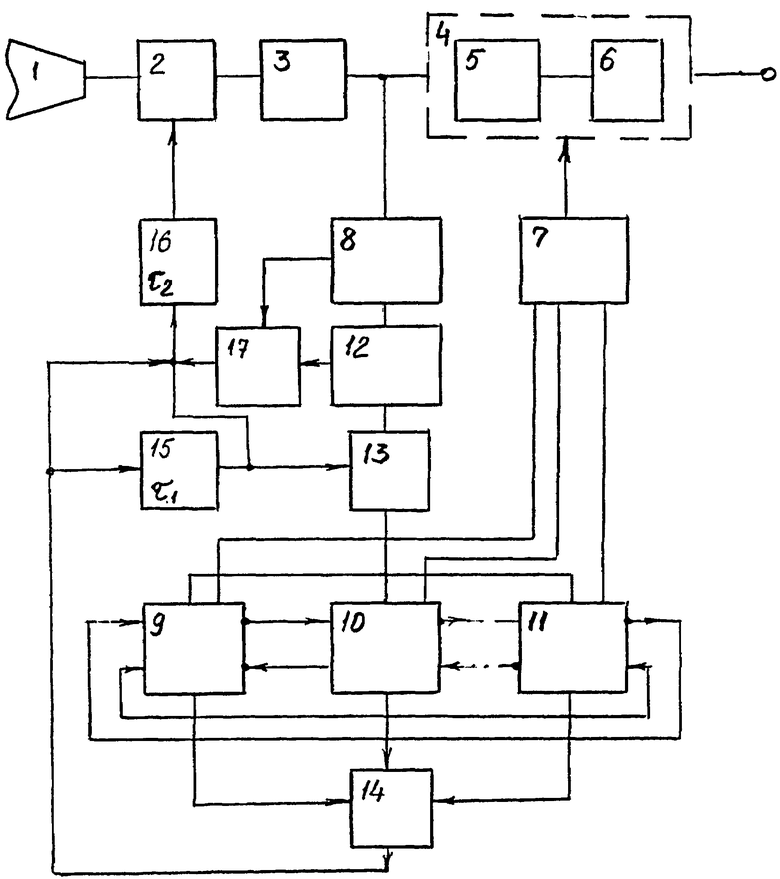
1. Способ управления системой генерирования электрической энергии, заключающийся в том, что на выходе генератора, подключенного к приводному валу авиадвигателя через расцепитель, формируют напряжение переменного тока нестабильной частоты, которое преобразуют с помощью статического преобразователя в напряжение переменного тока стабильной частоты, необходимое для питания потребителей электроэнергии, при этом на выходных выводах узла управления статическим преобразователем формируют сигналы в соответствии с законом регулирования системы, задаваемым несколькими микропроцессорами, для контроля рабочего состояния которых на их контрольных выводах формируют одинаковые меандры напряжения заданной ширины и частоты, параметры которых могут изменяться в зависимости от рабочего состояния микропроцессоров, причем в каждой паре соседних микропроцессоров меандры сравнивают друг с другом и при отклонении параметров меандров друг от друга в, по меньшей мере, одной из пар микропроцессоров формируют сигнал на отключение блока питания от всех микропроцессоров на фиксированное минимальное время, за которое они могут восстановить нормальную работу, затем сигналы с контрольных выводов микропроцессоров вновь сравнивают друг с другом, и в случае отсутствия восстановления их нормальной работы через дополнительное фиксированное время на управляющем входе расцепителя формируют сигнал на отключение приводного вала авиадвигателя от генератора напряжения.
2. Устройство для реализации способа управления системой генерирования электрической энергии, содержащее генератор напряжения переменного тока нестабильной частоты, входом подключенный к приводному валу авиадвигателя через расцепитель, а выходом - к статическому преобразователю напряжения, формирующему на нагрузочной шине напряжение переменного тока стабильной частоты, необходимое для питания потребителей электроэнергии, управляющий вход статического преобразователя напряжения подсоединен к выходу блока управления, входы которого присоединены к выходам микропроцессоров, предназначенным для формирования сигналов в соответствии с законом регулирования системы, контрольные выводы каждой пары соседних микропроцессоров, предназначенные для формирования сигналов контроля рабочего состояния микропроцессоров, присоединены к соответствующему узлу сравнения, выход которого подключен к одному из входов сумматора, выходом присоединенного к спусковому узлу, выполненному с возможностью возврата в исходное состояние с фиксированной задержкой, выход спускового узла подключен к входу управления ключа, включенного в цепь соединения микропроцессоров с их блоком питания, при этом выход сумматора подсоединен также к узлу дополнительной фиксированной задержки, выходом связанному с управляющим входом расцепителя.
3. Устройство для реализации способа управления системой генерирования электрической энергии по п.2, отличающееся тем, что выход сумматора присоединен дополнительно к выходу датчика напряжения, подключенному к блокам питания микропроцессоров и статического преобразователя напряжения.
| КОНТРОЛЛЕР ДИАГНОСТИКИ И ЗАЩИТЫ | 2003 |
|
RU2256993C2 |
| Регулятор питания чесальной машины | 1952 |
|
SU97883A1 |
| RU 93016313 А, 20.07.1995 | |||
| Система генерирования и распределения электрической энергии | 1980 |
|
SU1351524A3 |
| US 20090290270 А1, 26.11.2009 | |||
| US 20100010684 A1, 14.01.2010 | |||
| ЕР 1693953 A1, 23.08.2006 | |||
| Узел соединения секций эстакады гидротехнического сооружения | 1985 |
|
SU1317057A1 |
| WO 1913926082 A1, 23.12.1993. | |||

