Изобретение относится к радиосвязи и может быть одновременно использовано для демодуляции и фильтрации фазомодулированных, а также фазоманипулированных сигналов.
Известен способ демодуляции фазомодулированных сигналов (ФМС), состоящий в том, что на два нелинейных элемента одновременно подаются в противофазе высокочастотный ФМС и в фазе высокочастотное опорное колебание с частотой, равной несущей частоте ФМС. В результате происходит сравнение изменяемой во времени фазы ФМС и постоянной фазы опорного колебания, вследствие чего осуществляется преобразование ФМС в амплитудно-модулированный и фазомодулированный сигнал (АФМС). При этом амплитуда изменяется по закону изменения фазы. Этот сигнал далее испытывает такие же преобразования, как и в амплитудном демодуляторе [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. Это означает, что на нелинейных элементах спектр АФМС разрушается на низкочастотные и высокочастотные составляющие. Далее с помощью фильтра нижних частот выделяется низкочастотная составляющая, амплитуда которой изменяется по закону изменения фазы входного ФМС. Затем с помощью разделительной емкости, включенной в продольную цепь (последовательно), устраняется постоянная составляющая, возникшая на нелинейных элементах в результате взаимодействия с АФМС. После этого низкочастотные колебания, содержащие полезную информацию, выделяются на низкочастотной нагрузке.
Недостаток такого способа и устройства его реализации состоит в том, что для выделения низкочастотного сигнала, амплитуда которого изменяется в соответствии с законом изменения фазы высокочастотного ФМС, необходимо наличие генератора опорных колебаний. При этом высокочастотная часть демодулятора имеет произвольную (неконтролируемую) АЧХ. Поэтому в общем случае имеет место низкая помехоустойчивость, поскольку отсутствует возможность формирования необходимой формы АЧХ.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является устройство демодуляции фазомодулированных сигналов, выполненное в виде частотного детектора, состоящего из каскадно-соединенных амплитудного ограничителя, преобразователя частотно-модулированного сигнала (ЧМС) в амплитудно-частотно-модулированный сигнал (АЧМС) в виде параллельного колебательного контура и обычного амплитудного демодулятора. Далее процесс выделения низкочастотной составляющей осуществляется так же, как описано выше. Особенность использования частотного детектора для демодуляции ФМС состоит в том, что если частота несущего сигнала ФМС расположена на правом склоне амплитудно-частотной характеристики (АЧХ) контура, то низкочастотную составляющую подают на дифференцирующую цепь. Если частота несущего сигнала ФМС расположена на левом склоне АЧХ контура, то низкочастотную составляющую подают на интегрирующую цепь [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. При необходимости между источником модулированных сигналов и нелинейным элементом или между нелинейным элементом и нагрузкой включают реактивный или резистивный четырехполюсник для согласования и дополнительной селекции сигнала и помехи. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного фазомодулированного колебания.
Недостаток устройства состоит в том, что после преобразования ФМС в АФМС глубина (коэффициент) амплитудной модуляции АФМС не контролируется и, как правило, бывает незначительной по величине, что ухудшает помехоустойчивость [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292. Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Радио и связь, 1986, стр.247-252]. Другим недостатком является то, что классическая теория радиотехнических цепей предполагает, что нелинейный элемент является чисто резистивным и безынерционным, в связи с чем никак не реагирует на изменение частоты входного сигнала, а реагирует только на изменение амплитуды. Между тем, повседневный опыт показывает, что нелинейные элементы имеют внутренние емкости и индуктивности, которые оказывают существенное влияние на формирование зависимости их проводимости (сопротивления или элементов матрицы проводимостей или сопротивлений) от частоты. Особенно существенно это проявляется с повышением частоты, к чему в настоящее время в основном стремятся проектировщики новых систем и средств радиосвязи. При этом высокочастотная часть демодулятора имеет произвольную (неконтролируемую) АЧХ. Поэтому в общем случае имеет место низкая помехоустойчивость, поскольку отсутствует возможность формирования необходимой формы АЧХ.
Техническим результатом изобретения является одновременное обеспечение демодуляции и фильтрации ФМС без использования генератора опорных колебаний с преобразованием ФМС в АФМС с помощью высокочастотной части демодулятора с заданным квазилинейным склоном и формой АЧХ, что повышает помехоустойчивость приемника, с учетом зависимости сопротивления двухполюсного нелинейного элемента от частоты, что увеличивает точность расчета значений параметров элементов схемы.
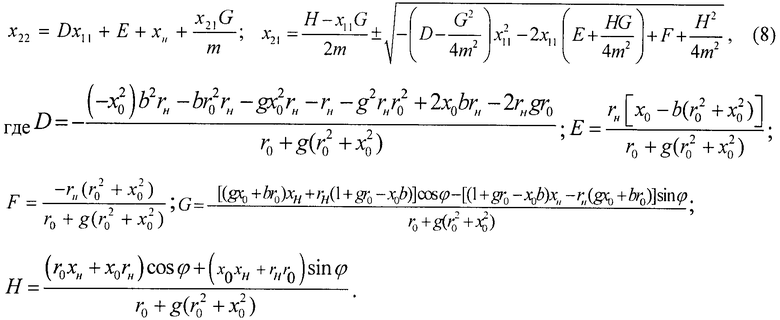
1. Указанный результат достигается тем, что в способе демодуляции и фильтрации фазомодулированных сигналов, состоящем в том, что демодулятор включают между источником фазомодулированных сигналов и низкочастотной нагрузкой и выполняют его из четырехполюсника, двухполюсного нелинейного элемента, фильтра нижних частот и разделительной емкости, фазомодулированный сигнал преобразовывают в амплитудно-фазомодулированный сигнал путем его подачи на правый или левый склон амплитудно-частотной характеристики, с помощью нелинейного элемента разрушают спектр амплитудно-фазомодулированного сигнала на высокочастотные и низкочастотные составляющие, с помощью фильтра нижних частот выделяют информационный низкочастотный сигнал, с помощью разделительной емкости устраняют постоянную составляющую информационного низкочастотного сигнала, амплитуда которого изменяется по закону изменения фазы фазомодулированного входного сигнала, информационный низкочастотный сигнал подают на низкочастотную избирательную нагрузку в виде дифференцирующей или интегрирующей цепи соответственно, дополнительно между выходом четырехполюсника и фильтром нижних частот в поперечную цепь вводят высокочастотную нагрузку, двухполюсный нелинейный элемент включают между источником фазомодулированного сигнала и входом четырехполюсника в поперечную цепь, зависимости элементов матрицы сопротивлений четырехполюсника от частоты выбирают из условия формирования заданной формы и левого квазилинейного склона амплитудно-частотной характеристики высокочастотной части демодулятора с помощью следующих математических выражений:
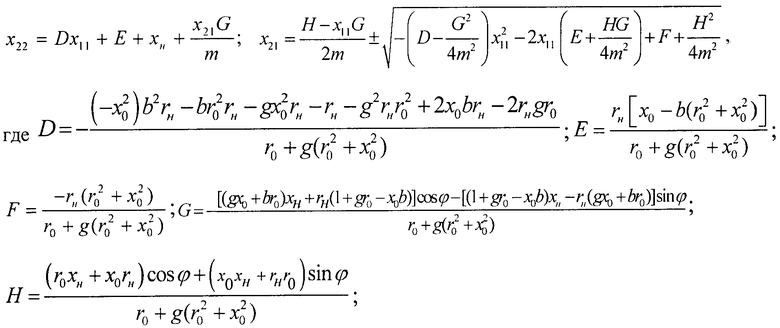
x11, x21=-x12 - оптимальные зависимости соответствующих элементов матрицы сопротивлений четырехполюсника от частоты с учетом условия взаимности; х22 - заданная зависимость соответствующего элемента матрицы сопротивлений четырехполюсника от частоты; m - заданная форма амплитудно-частотной характеристики с учетом квазилинейной зависимости модуля передаточной функции от частоты на левом склоне амплитудно-частотной характеристики высокочастотной части фазового демодулятора; φ - заданная зависимость фазы передаточной функции от частоты из условия физической реализуемости заданной формы амплитудно-частотной характеристики высокочастотной части фазового демодулятора; rн, хн - заданные частотные зависимости действительной и мнимой составляющих сопротивления нагрузки; r0, x0 - заданные частотные зависимости действительной и мнимой составляющих сопротивления источника фазомодулированного сигнала; g, b - заданные частотные зависимости действительной и мнимой составляющих проводимости двухполюсного нелинейного элемента; остальные величины имеют смысл промежуточных обозначений для упрощения математических выражений.
2. Указанный результат достигается тем, что в устройстве демодуляции и фильтрации фазомодулированных сигналов, включенном между источником фазомодулированных сигналов и низкочастотной нагрузкой в виде интегрирующей цепи и состоящем из четырехполюсника, двухполюсного нелинейного элемента, фильтра нижних частот и разделительной емкости, дополнительно между выходом четырехполюсника и фильтром нижних частот в поперечную цепь введена высокочастотная нагрузка, двухполюсный нелинейный элемент включен между источником фазомодулированного сигнала и входом четырехполюсника в поперечную цепь, четырехполюсник выполнен из обратного Г-образного соединения двух двухполюсников с сопротивлениями х1n, х2n, каждый из двухполюсников сформирован из двух последовательно соединенных параллельных колебательных контуров из элементов с параметрами L1k, С1k, L2k, С2k, значения которых определены в соответствии со следующими математическими выражениями:

mn - заданные значения модулей передаточной функции на заданных четырех частотах ωn=2πfn из условия формирования заданной формы и квазилинейного левого склона амплитудно-частотной характеристики высокочастотной части фазового демодулятора; φn - заданные значения фаз передаточной функции на заданных четырех частотах ωn=2πfn из условия физической реализуемости заданной формы амплитудно-частотной характеристики высокочастотной части фазового демодулятора; r0n, x0n - заданные значения действительной и мнимой составляющих сопротивления источника фазомодулированного сигнала на заданных четырех частотах; rнn, хнn - заданные значения действительной и мнимой составляющих сопротивления высокочастотной нагрузки на заданных четырех частотах; gn, bn - заданные значения действительной и мнимой составляющих проводимости двухполюсного нелинейного элемента на заданных четырех частотах; k=1, 2 - номер двухполюсника обратного Г-образного соединения; n=1, 2, 3, 4 - номер частоты; остальные величины имеют смысл промежуточных обозначений для упрощения математических выражений.
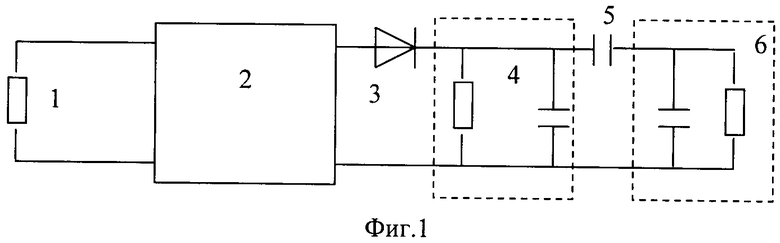
На фиг.1 показана схема устройства демодуляции фазомодулированных радиочастотных сигналов (прототип).
На фиг.2 показана структурная схема предлагаемого устройства по п.2, реализующего предлагаемый способ по п.1.
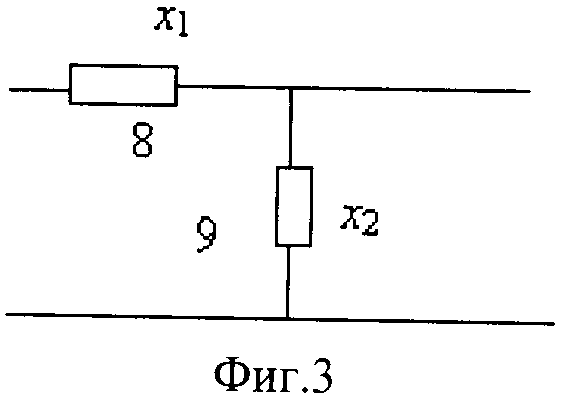
На фиг.3 приведена структурная схема четырехполюсника (согласующе-фильтрующего устройства (СФУ)), входящего в предлагаемое устройство по п.2, показанное на фиг.2.
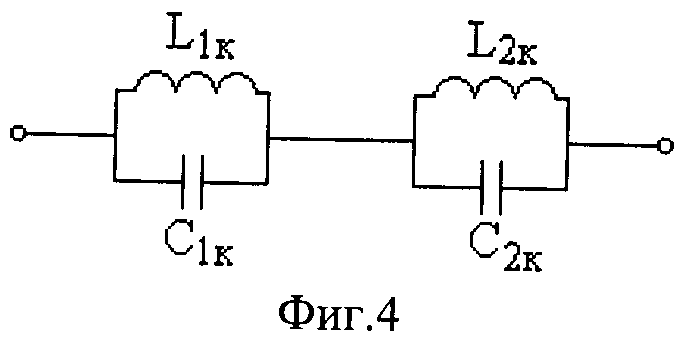
На фиг.4 приведена принципиальная схема двухполюсников, входящих в структурную схему четырехполюсника, изображенную на фиг.3.
Устройство-прототип содержит источник 1 фазомодулированных сигналов, четырехполюсник 2, нелинейный элемент 3, фильтр нижних частот 4 на элементах R, C, разделительную емкость 5 на элементе Ср и низкочастотную нагрузку 6 на элементах Rн, Сн.
Принцип действия устройства демодуляции фазомодулированных сигналов (прототипа) состоит в следующем.
Фазомодулированный сигнал от источника 1 подают на демодулятор из последовательно включенного полупроводникового диода к фильтру нижних частот. С помощью реактивного четырехполюсника 2, представляющего собой параллельный колебательный контур и включенного между источником ФМС и нелинейным элементом, преобразовывают ФМС в АФМС, с помощью нелинейного элемента 3 разрушают (разлагают) спектр АФМС на высокочастотные и низкочастотные составляющие. Последние выделяются с помощью фильтра нижних частот (интегрирующей цепи) 4 и поступают в низкочастотную нагрузку 6. Разделительная емкость 5 устраняет постоянную составляющую. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей сформированного АФМС высокочастотного амплитудно-модулированного колебания.
Недостаток способа и устройства его реализации состоит в том, что при прохождении ФМС через указанную цепь после преобразования ФМС в АФМС коэффициент амплитудной модуляции последнего является незначительным. Это связано с большой шириной спектра ФМС, т.е. с малой добротностью контура. С другой стороны, чем уже полоса пропускания контура, тем большим искажениям подвергается принятый сигнал. Высокочастотная часть демодулятора имеет произвольную (неконтролируемую) АЧХ. Поэтому в общем случае имеет место низкая помехоустойчивость, поскольку отсутствует возможность формирования необходимой формы АЧХ, которая бы одновременно преобразовывала ФМС в АФМС и осуществляла фильтрацию ФМС.
Высокочастотная часть структурной схемы обобщенного предлагаемого устройства по п.2 (фиг.2) состоит из каскадно-соединенных источника ФМС с сопротивлением z0 1, двухполюсного нелинейного элемента 3 с проводимостью y, реактивного четырехполюсника 2, и высокочастотной нагрузки 7 с сопротивлением zн. Низкочастотная часть структурной схемы содержит фильтр нижних частот 4, разделительную емкость 5 и низкочастотную нагрузку 6.
Принцип действия данного устройства состоит в том, что при подаче ФМС от источника 1 в результате специального выбора значений параметров матрицы сопротивлений четырехполюсника 2 из условий обеспечения заданного квазилинейного склона АЧХ (с заданной крутизной склона и заданной формой АЧХ) ФМС преобразуется в АФМС с заданным коэффициентом амплитудной модуляции АФМС. Благодаря этому достигается минимум искажений входного сигнала. Одновременно спектр АФМС разрушается при помощи нелинейного элемента 3, включенного в поперечную цепь между источником ФМС и входом четырехполюсника, фильтр нижних частот 4 выделяет низкочастотную составляющую, постоянная составляющая устраняется с помощью разделительной емкости 5. Возможность выбора варианта места включения нелинейного элемента дополнительно варьирует величину области физической реализуемости и полосы пропускания. Так как выбран левый склон АЧХ, то в качестве низкочастотной нагрузки необходимо использовать интегрирующую цепь, которая реализуется с помощью фильтра нижних частот. В результате низкочастотное колебание, амплитуда которого изменяется по закону изменения фазы входного ФМС, выделяется на низкочастотной нагрузке 6. Четырехполюсник выполнен в виде обратного Г-образного соединения двух двухполюсников с сопротивлениями х1 (8), х2 (9) (фиг.3). Каждый из двухполюсников выполнен в виде последовательно соединенных между собой двух параллельных контуров (фиг.4). Значения индуктивностей и емкостей выбраны из условия совпадения реальных значений модулей передаточной функции высокочастотной части фазового демодулятора с заданными значениями модулей передаточной функции на четырех заданных частотах. Разумный выбор относительного положения этих частот обеспечивает реализацию требуемой формы АЧХ и заданной крутизны квазилинейного левого склона АЧХ. В результате одновременно обеспечивается преобразование ФМС в АФМС и фильтрация ФМС с помощью всей высокочастотной части фазового демодулятора.
Докажем возможность реализации указанных свойств.
Пусть на вход демодулятора воздействуют фазомодулированное колебание  где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; mφ - индекс фазовой модуляции; φ0 - начальная фаза; Ω - частота первичного информационного низкочастотного сигнала. Поскольку частота определяется производной от фазы, то одновременно с изменением фазы в фазомодулированном колебании будет происходить изменение частоты по следующему закону:
где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; mφ - индекс фазовой модуляции; φ0 - начальная фаза; Ω - частота первичного информационного низкочастотного сигнала. Поскольку частота определяется производной от фазы, то одновременно с изменением фазы в фазомодулированном колебании будет происходить изменение частоты по следующему закону:  . Поэтому, если ФМС подать на правый склон АЧХ высокочастотной части демодулятора, то произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (sin(Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо продифференцировать огибающую преобразованного сигнала, т.е. подать на дифференцирующую цепь. Если ФМС подать на левый склон АЧХ, то также произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (минус sin(Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо проинтегрировать огибающую преобразованного сигнала, т.е. подать на интегрирующую цепь. Этот случай более предпочтителен, потому что интегрирующая цепь (фильтр нижних частот) не шунтирует низкочастотную цепь.
. Поэтому, если ФМС подать на правый склон АЧХ высокочастотной части демодулятора, то произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (sin(Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо продифференцировать огибающую преобразованного сигнала, т.е. подать на дифференцирующую цепь. Если ФМС подать на левый склон АЧХ, то также произойдет преобразование ФМС в АФМС. При этом амплитуда АФМС будет изменяться по закону (минус sin(Ωt)). Следовательно, для того чтобы закон изменения амплитуды АФМС повторял закон изменения фазы ФМС, необходимо проинтегрировать огибающую преобразованного сигнала, т.е. подать на интегрирующую цепь. Этот случай более предпочтителен, потому что интегрирующая цепь (фильтр нижних частот) не шунтирует низкочастотную цепь.
Входной модулированный высокочастотный сигнал Sвх и преобразованный с помощью высокочастотной части демодулятора (до фильтра нижних частот) Sвых связаны между собой следующим образом: Sвых=S21Sвх, где под входным и выходным сигналом подразумевается входное и выходное напряжения; S21 - коэффициент передачи:

где m, φ - заданные зависимости модуля и фазы коэффициента передачи от частоты (аргумент ω=2πf для простоты опущен).
Коэффициент амплитудной модуляции АФМС может быть определен следующим образом:  ,
,
где m1,2 заданные значения модулей коэффициентов передачи высокочастотной части демодулятора на двух заданных частотах левого склона АЧХ.
Пусть известны зависимости сопротивления источника сигнала Z0=r0+jx0, нагрузки Zн=rн+jxн и проводимости двухполюсного нелинейного элемента у=g+jb от частоты (аргумент ω=2πf для простоты опущен).
Требуется определить частотные характеристики четырехполюсника и двухполюсников, из которых сформирован четырехполюсник, а также минимальное количество элементов и значения параметров двухполюсников, при которых обеспечивались бы заданные частотные зависимости модулей m и фаз φ коэффициента передачи (1).
Пусть четырехполюсник содержит только реактивные элементы. Таким образом, с учетом условия взаимности (х12=-x21) СФУ может характеризоваться матрицей сопротивления
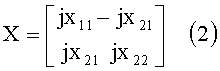
и соответствующей классической матрицей передачи:
где  - определитель матрицы (2).
- определитель матрицы (2).
Известна классическая матрица передачи двухполюсного нелинейного элемента:

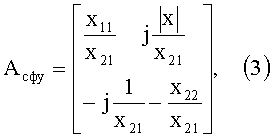
Перемножим матрицы (4) и (3). С учетом условий нормировки [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971. с.34-36] нормированную матрицу передачи высокочастотной части демодулятора (до фильтра нижних частот) запишем в следующем виде:
Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971. с.39], с учетом (5) получим выражение для коэффициента передачи:

Квадратный корень из (6) можно представить в виде комплексного числа  где
где
 ;
;  ; x1=r0rн-x0xн; y1=r0хн+х0rн.
; x1=r0rн-x0xн; y1=r0хн+х0rн.
После денормировки коэффициента передачи (6) путем умножения на  последнее выражение изменяется а1=rн; b1=xн.
последнее выражение изменяется а1=rн; b1=xн.
Для получения взаимосвязей, оптимальных по критерию обеспечения заданных частотных зависимостей модулей и фаз передаточной функции высокочастотной части демодулятора, подставим (6) в (1) и после разделения действительной и мнимой частей между собой получим систему двух уравнений:
где А=1+r0g-x0b; В=r0b+x0g.
Решение системы (7) имеет форму взаимосвязей между элементами матрицы сопротивлений СФУ или аппроксимирующих функций частотных зависимостей этих элементов, оптимальных по критерию (I):
Поскольку информация заключена в огибающей АФМС, то частотную зависимость модуля m передаточной функции на левом склоне АЧХ необходимо выбирать линейной. Частотная зависимость фазы φ передаточной функции может быть выбрана произвольно, поскольку информация заключена в огибающей АФМС или исходя из каких-либо других физических соображений. В данном изобретении она выбирается из условия физической реализуемости, определяемой положительностью подкоренного выражения в (8).
Для определения оптимальных по критерию (1) зависимостей сопротивлений двухполюсников, формирующих СФУ, от частоты необходимо выбрать типовую схему СФУ, найти элементы ее матрицы сопротивлений, подставить их в (8) и решить получившуюся таким образом систему двух уравнений относительно сопротивлений двух двухполюсников. Если количество двухполюсников выбранной схемы СФУ больше двух, то частотные характеристики остальных двухполюсников могут быть выбраны произвольно или исходя из каких-либо других физических соображений.
В соответствии с изложенным алгоритмом получены аппроксимирующие функции частотных зависимостей сопротивлений двухполюсников обратного Г-образного соединения двух двухполюсников (фиг.3):

 ,
,
где индекс n введен для обозначения номера частоты в интересах реализации аппроксимирующих функций (9) методом интерполяций. В коэффициентах D, Е, F, G, Н (8) также необходимо ввести индекс n в величинах r0, x0, rн, xн, g, b. Для реализации оптимальных аппроксимаций (9) методом интерполяции необходимо сформировать двухполюсники с сопротивлениями x1n, х2n из не менее чем N (числа частот интерполяции) реактивных элементов, найти выражения для их сопротивлений, приравнять их оптимальным значениям сопротивлений двухполюсников на заданных частотах, определенным по формулам (9), и решить сформированную таким образом систему N уравнений относительно N выбранных параметров реактивных элементов. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например из условия физической реализуемости. Пусть каждый из двухполюсников с сопротивлениями х1n, х2n сформирован из двух последовательно соединенных параллельных контуров L1k, C1k, L2k, C2k (фиг.4) (k=1, 2 - номер двухполюсника (фиг.3)). Для N=4 составим две системы четырех уравнений:

Реализация оптимальных аппроксимаций частотных характеристик четырехполюсника в виде обратного Г-образного звена (9) с помощью (11) при разумном выборе положений заданных частот относительно друг друга ω1-ω2, ω1-ω3, ω1-ω4, ω2-ω3, ω2-ω4, ω3-ω4 обеспечивает увеличение квазилинейного участка левого склона АЧХ высокочастотной части фазового демодулятора и требуемую форму АЧХ при произвольно заданных частотных зависимостях r0, x0, rн, хн, g, b, определяющих значения сопротивлений источника ФМС r0n, x0n, нагрузки rнn, хнn и проводимости нелинейного элемента gn, bn на четырех заданных частотах.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестны способ и устройство одновременного осуществления демодуляции и фильтрации ФМС, обеспечивающие преобразование ФМС в АФМС на увеличенном квазилинейном участке левого склона АЧХ и заданную форму АЧХ, при этом устройство состоит из нелинейного двухполюсного элемента, включенного в поперечную цепь (параллельно) между источником ФМС и входом реактивного четырехполюсника, высокочастотной нагрузки, введенной между выходом четырехполюсника и фильтром нижних частот в поперечную цепь, причем четырехполюсник выполнен в виде обратного Г-образного соединения двух реактивных двухполюсников, каждый из которых сформирован из двух последовательно соединенных параллельных колебательных контуров, значения параметров которых определены по соответствующим математическим выражениям.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (включение двухполюсного нелинейного элемента между источником ФМС и входом четырехполюсника в поперечную цепь, включение высокочастотной нагрузки между выходом четырехполюсника и фильтром нижних частот в поперечную цепь, выполнение четырехполюсника реактивным в виде обратного Г-образного соединения двух двухполюсников, формирование их из двух последовательно соединенных параллельных колебательных контуров с выбором значений их параметров из условия увеличения квазилинейного участка левого склона АЧХ и обеспечения заданной формы АЧХ, одновременно осуществляет фильтрацию и преобразование ФМС в АФМС без наличия источника опорного сигнала.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды, индуктивности и емкости, сформированные в заявленную схему реактивного четырехполюсника. Значения индуктивностей и емкостей однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении фильтрации и демодуляции входного ФМС без источника опорного сигнала, что способствует повышению помехоустойчивости и снижению стоимости фазового демодулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483430C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2491711C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2490756C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ И ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2486663C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2486662C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ И ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2485672C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ И ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2487463C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ И ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504898C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2488950C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483433C2 |
Изобретение относится к области радиосвязи и может использоваться для демодуляции фазоманипулированных, а также фазомодулированных сигналов. Достигаемый технический результат - обеспечение демодуляции и фильтрации без использования генератора опорных колебаний с преобразованием фазомодулированного сигнала в амплитудно-фазомодулированный сигнал с помощью высокочастотной части демодулятора с заданным квазилинейным склоном и формой АЧХ для повышения помехоустойчивости. Способ демодуляции и фильтрации фазомодулированных сигналов характеризуется тем, что фазомодулированный сигнал подают на демодулятор, содержащий четырехполюсник, двухполюсный нелинейный элемент, высокочастотную нагрузку, четырехполюсник выполнен из обратного Г-образного соединения двух двухполюсников, каждый из которых сформирован из двух параллельных колебательных контуров, фильтр нижних частот и низкочастотную нагрузку, при этом фазомодулированный сигнал преобразовывают в амплитудно-фазомодулированный сигнал путем подачи этого сигнала на правый или на левый склон АЧХ высокочастотной части демодулятора в заданной полосе частот, значения параметров элементов четырехполюсника определяются с помощью приведенных в формуле математических выражений. 2 н.п. ф-лы, 4 ил.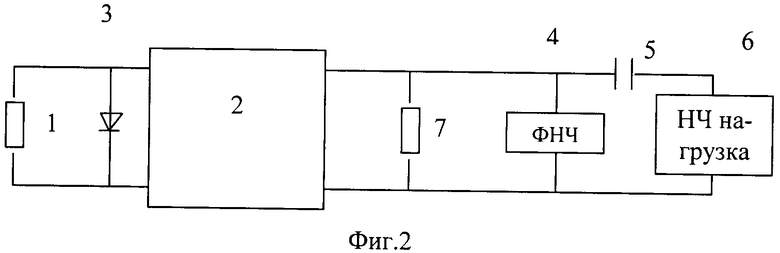
1. Способ демодуляции и фильтрации фазомодулированных сигналов, состоящий в том, что демодулятор включают между источником фазомодулированных сигналов и низкочастотной нагрузкой и выполняют его из четырехполюсника, двухполюсного нелинейного элемента, фильтра нижних частот и разделительной емкости, фазомодулированный сигнал преобразовывают в амплитудно-фазомодулированный сигнал путем его подачи на правый или левый склон амплитудно-частотной характеристики, с помощью нелинейного элемента разрушают спектр амплитудно-фазомодулированного сигнала на высокочастотные и низкочастотные составляющие, с помощью фильтра нижних частот выделяют информационный низкочастотный сигнал, с помощью разделительной емкости устраняют постоянную составляющую информационного низкочастотного сигнала, амплитуда которого изменяется по закону изменения фазы фазомодулированного входного сигнала, информационный низкочастотный сигнал подают на низкочастотную избирательную нагрузку в виде дифференцирующей или интегрирующей цепи соответственно, отличающийся тем, что между выходом четырехполюсника и фильтром нижних частот в поперечную цепь вводят высокочастотную нагрузку, двухполюсный нелинейный элемент включают между источником фазомодулированного сигнала и входом четырехполюсника в поперечную цепь, зависимости элементов матрицы сопротивлений четырехполюсника от частоты выбирают из условия формирования заданной формы и левого квазилинейного склона амплитудно-частотной характеристики высокочастотной части демодулятора с помощью следующих математических выражений:
 ;
;  ,
,
где  ;
;  ;
;
 ;
;  ;
;
 ;
;
x11, x21=-x12 - оптимальные зависимости соответствующих элементов матрицы сопротивлений четырехполюсника от частоты с учетом условия взаимности; х22 - заданная зависимость соответствующего элемента матрицы сопротивлений четырехполюсника от частоты; m - заданная форма амплитудно-частотной характеристики с учетом квазилинейной зависимости модуля передаточной функции от частоты на левом склоне амплитудно-частотной характеристики высокочастотной части фазового демодулятора; φ - заданная зависимость фазы передаточной функции от частоты из условия физической реализуемости заданной формы амплитудно-частотной характеристики высокочастотной части фазового демодулятора; rн, хн - заданные частотные зависимости действительной и мнимой составляющих сопротивления нагрузки; r0, х0 - заданные частотные зависимости действительной и мнимой составляющих сопротивления источника фазомодулированного сигнала; g, b - заданные частотные зависимости действительной и мнимой составляющих проводимости двухполюсного нелинейного элемента; остальные величины имеют смысл промежуточных обозначений для упрощения математических выражений.
2. Устройство демодуляции и фильтрации фазомодулированных сигналов, включенное между источником фазомодулированных сигналов и низкочастотной нагрузкой в виде интегрирующей цепи и состоящее из четырехполюсника, двухполюсного нелинейного элемента, фильтра нижних частот и разделительной емкости, отличающееся тем, что между выходом четырехполюсника и фильтром нижних частот в поперечную цепь введена высокочастотная нагрузка, двухполюсный нелинейный элемент включен между источником фазомодулированного сигнала и входом четырехполюсника в поперечную цепь, четырехполюсник выполнен из обратного Г-образного соединения двух двухполюсников с сопротивлениями x1n, x2n, каждый из двухполюсников сформирован из двух последовательно соединенных параллельных колебательных контуров из элементов с параметрами L1k, C1k, L2k, C2k, значения которых определены в соответствии со следующими математическими выражениями:
 ;
;  ;
;  ;
;  ;
;
где  ;
;  ;
;
х=a2c1-a1c2; y=a2d1+b2c1-a1d2-b1c2; z=b2d1-b1d2;
 ;
;
 ;
;

 ;
;
 ;
;
 ;
;


 ;
;
 ;
;


 ;
;  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

mn - заданные значения модулей передаточной функции на заданных четырех частотах ωn=2πfn из условия формирования заданной формы и квазилинейного левого склона амплитудно-частотной характеристики высокочастотной части фазового демодулятора; φn - заданные значения фаз передаточной функции на заданных четырех частотах ωn=2πfn из условия физической реализуемости заданной формы амплитудно-частотной характеристики высокочастотной части фазового демодулятора; r0n, x0n - заданные значения действительной и мнимой составляющих сопротивления источника фазомодулированного сигнала на заданных четырех частотах; rнn, хнn - заданные значения действительной и мнимой составляющих сопротивления высокочастотной нагрузки на заданных четырех частотах; gn, bn - заданные значения действительной и мнимой составляющих проводимости двухполюсного нелинейного элемента на заданных четырех частотах; k=1, 2 - номер двухполюсника обратного Г-образного соединения; n=1, 2, 3, 4 - номер частоты; остальные величины имеют смысл промежуточных обозначений для упрощения математических выражений.
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341890C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341887C1 |
| 0 |
|
SU217457A1 | |
| DE 2944235 А, 08.05.1980. | |||

