Изобретение относится к системе определения местоположения и к способу определения местоположения интересующей точки, в частности хирургического инструмента. Кроме того, оно относится к медицинской системе, содержащей такую систему определения местоположения, а также к компьютерной программе и к носителю записи, связанным с упомянутым способом.
На сегодня многочисленные диагностические и терапевтические процедуры проделываются при минимальных хирургических вмешательствах, чтобы снизить затраты и риски для пациента. Типичным примером таких вмешательств является проведение катетера по сосудистой системе пациента. Патент США № 7152608 B2 описывает в этом отношении систему определения местоположения, содержащую внешние генераторы магнитного поля и сенсорный зонд, прикрепленный к катетеру, который вводится в тело пациента. Считывая значение создаваемых снаружи магнитных полей, датчик может указывать свое собственное пространственное положение и, таким образом, определять местоположение катетера внутри тела.
Заявка WO 2005/051187 A описывает систему измерения размеров внутренней полости тела посредством сканирования упомянутой полости с помощью вращающегося пучка, излучаемого волноводом, составляющим часть пути по пациенту для разделенного светового пучка. Излученный свет, который отражается от поверхности полости, возвращается через упомянутый волновод к источнику света, где взаимодействует с другой частью упомянутого разделенного светового пучка, который проходит по известной эталонной части пути. По результирующей интерферограмме может быть определен размер полости тела.
Заявка US 2006/276709 А1 описывает систему оптической компьютерной томографии для реконструкции поверхности канала внутреннего уха.
Патент США 5541730 описывает лазерный интерферометр для измерения расстояний посредством сравнения световых пучков, которые были разделены между траекторией измерения и двумя эталонными траекториями.
Основываясь на этом уровне техники, задачей настоящего изобретения является обеспечение альтернативного средства для определения местоположения хирургических инструментов, в котором желательно, чтобы это средство было экономически эффективным при повседневном клиническом использовании и/или надежным в отношении результатов измерений.
Эта задача решается системой определения местоположения, соответствующей пункту 1 формулы изобретения, медицинской системой, соответствующей пункту 7 формулы изобретения, способом, соответствующим пункту 8 формулы изобретения, компьютерной программой, соответствующей пункту 9 формулы изобретения, и носителем записи, соответствующим пункту 10 формулы изобретения. Предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы изобретения.
Система определения местоположения, соответствующая настоящему изобретению, служит для определения местоположения интересующей точки, например, наконечника хирургического инструмента, подобного катетеру, эндоскопу или игле, во время его движения внутри тела пациента. Система определения местоположения содержит следующие компоненты:
a) источник электромагнитных волн для создания электромагнитного сигнала и деления его на компоненты, распространяющиеся параллельно, по меньшей мере, по одному пути прохождения зонда и по базовому пути. Источник электромагнитных волн предпочтительно является микроволновым источником, обеспечивающим электромагнитный сигнал с частотой обычно в диапазоне приблизительно от 1 кГц до 100 ГГц.
b) Вышеупомянутый, по меньшей мере, один путь прохождения зонда, причем этот путь прохождения зонда содержит:
- Выход сигнала для излучения в интересующую пространственную точку компонента электромагнитного сигнала, распространяющегося по пути прохождения зонда. Выход сигнала может быть, например, концом волновода, расположенным на конце катетера, который должен прослеживаться. Электромагнитный сигнал обычно излучается с выхода сигнала во многих направлениях, предпочтительно, равномерно одинаково по всем направлениям.
- Детектор для регистрации (приема) вышеупомянутого компонента электромагнитного сигнала, который был излучен на выходе сигнала. "Регистрация" компонента сигнала должен содержать в этом контексте совокупность, по меньшей мере, части энергии компонента сигнала так, чтобы форма (и информация) сигнала сохранялись. Поскольку электромагнитная волна обычно рассеивается с выхода сигнала во многих направлениях, детектор обычно будет фактически захватывать только малую часть излучаемой энергии.
c) Коррелятор для определения корреляции между компонентами электромагнитного сигнала, которые распространяются вдоль пути прохождения зонда и по базовому пути соответственно. Оптически такая корреляция соответствует интерференции компонентов сигнала, проходящих по пути прохождения зонда и по базовому пути, то есть коррелятор может быть осуществлен с помощью оптического интерферометра.
d) Блок оценки для оценки пространственного местоположения выхода сигнала и, таким образом, интересующей точки, исходя из упомянутой выше определенной корреляции между компонентами сигнала, проходящими по пути прохождения зонда и по базовому пути. В этом контексте "оценка местоположения" выхода сигнала должна в широком смысле означать любое ограничение возможного местонахождения выхода сигнала. Определяя расстояние между выходом сигнала и детектором, местонахождение выхода может ограничиваться, например, расположением (где-либо) на сфере вокруг детектора. Предпочтительно, местоположение выхода сигнала определяется в конкретном месте, не оставляя степени свободы или неопределенности, то есть в конкретной точке в пространстве.
Блок оценки может быть осуществлен, например, с помощью специализированных электронных аппаратурных средств и/или блока цифровой обработки данных с соответствующим программным обеспечением.
Предложенная система определения местоположения сравнивает компоненты электромагнитного сигнала, которые распространяются вдоль пути прохождения зонда и вдоль базового пути соответственно, в которой максимальная корреляция указывает, что путь прохождения зонда и базовый путь имеют равные (оптические) длины. Поэтому знание длины базового пути позволяет сделать вывод о длине пути прохождения зонда и, таким образом, о неизвестном расстоянии между выходом сигнала и детектором, который является частью пути прохождения зонда. Преимущество этого способа по сравнению с оптическими системами слежения состоит в том, что он работает без визуального контакта между выходом сигнала и детектором. Преимущество по сравнению с магнитными системами слежения состоит в том, что способ нечувствителен к возмущениям за счет внешних магнитных или электрических полей или из-за присутствия, например, магнитных материалов.
В предпочтительном варианте осуществления изобретения система определения местоположения содержит, по меньшей мере, два, предпочтительно, по меньшей мере, три пути прохождения зонда, которые имеют один выход сигнала, но имеют индивидуальные детекторы, расположенные в разных местах в пространстве. Таким образом, различные пути прохождения зонда имеют одинаковые первые отрезки, продолжающиеся от источника электромагнитных волн до выхода сигнала, и индивидуальные вторые отрезки, продолжающиеся от выхода сигнала до конкретного детектора для каждого пути прохождения зонда и, дополнительно, от упомянутого детектора до коррелятора. Другими словами, единая ветвь путей прохождения зонда разделяется на множество ветвей на выходе сигнала. Как уже объяснялось, корреляция между компонентами электромагнитного сигнала, проходящими по пути прохождения зонда и проходящими по базовому пути, может использоваться, чтобы исключить одну степень свободы в отношении возможного местонахождения выхода сигнала. Используя два детектора (с известными относительными или абсолютными положениями в пространстве), определение местоположения выхода сигнала может быть поэтому ограничено одномерной линией в пространстве, которой иногда может быть достаточно для пользователя. Использование трех детекторов позволяет, в принципе, исключить все три степени свободы и, таким образом, определить местоположение выхода сигнала в конкретной точке в пространстве. Более трех детекторов могут с успехом использоваться, чтобы повысить точность определения местоположения, обеспечивая дополнительные данные для процедур коррекции ошибок и для решения возможных неопределенностей в данных трех детекторов.
Детектор, который используется, по меньшей мере, в одном пути прохождения зонда, предпочтительно чувствителен во всех пространственных направлениях и поэтому способен полностью измерять каждый трехмерный вектор поляризации падающего электромагнитного поля. Это может быть, например, достигнуто системой из трех взаимно перпендикулярных диполей, каждое из которых чувствительно к поляризации в одном пространственном направлении. Полное измерение трехмерного вектора поляризации компоненты электромагнитного сигнала, распространяющегося по пути прохождения зонда, гарантирует, что никакая энергия сигнала не теряется, независимо от ориентации детектора. Кроме того, это позволяет делать вывод о пространственном направлении, в котором находится выход сигнала, относительно соответствующего детектора и, таким образом, обеспечивать дополнительную информацию, которая может использоваться для определения местоположения выхода сигнала.
Полная погрешность системы определения местоположения кардинально зависит от точности, с которой может быть определена корреляция между компонентами электромагнитного сигнала, проходящими по пути прохождения зонда и по базовому пути, особенно от точности, с которой может быть обнаружен максимум корреляции (то есть равенство длин пути прохождения зонда и базового пути). В этом контексте предпочтительно, чтобы источник электромагнитных волн был источником волн с низкой когерентностью или, другими словами, источником генерации электромагнитных сигналов с широкой полосой частот. В типичных примерах ширина полосы излучаемых электромагнитных сигналов имеет диапазон от 10 кГц до 10 ГГц.
Низкая когерентность излучаемых электромагнитных сигналов означает, что существует только соответственно малое окно вокруг точного равенства длин пути прохождения зонда и базового пути, в котором присутствует сильная корреляция. Таким образом, равенство этих длин может обнаруживаться с высокой точностью. Кроме того, широкая полоса диапазона имеет то преимущество, что электромагнитный сигнал с высокой вероятностью всегда содержит частоты, на которых сигнал не поглощается или только минимально поглощается материалом, находящимся между выходом сигнала и детектором.
В принципе, можно расположить выход сигнала непосредственно в источнике электромагнитных волн и/или установить детектор непосредственно в корреляторе. В предпочтительном варианте осуществления пути прохождения зонда, однако, существует волновод, соединяющий источник электромагнитных волн с выходом сигнала, и/или волновод, соединяющий детектор с коррелятором. Аналогично, базовый путь, как вариант, может содержать волновод. Обычно базовый путь будет полностью лежать внутри этого волновода, который соединяет источник электромагнитных волн с коррелятором. Благодаря использованию волноводов компоненты системы определения местоположения могут быть расположены в оптимально подобранных положениях в рабочем пространстве, например, в наконечнике катетера (выход сигнала), на коже пациента (детекторы) или в удобном месте для большой аппаратуры в лаборатории (источник волны, коррелятор, блок оценки). Поскольку оптические длины волноводов известны и не изменяются, их введение не подразумевает появления какой-либо неопределенности в отношении длины пути прохождения зонда или базового пути.
При дополнительном развитии изобретения система определения местоположения содержит устройство слежения для слежения за пространственным положением и/или ориентацией детектора (или нескольких детекторов, если имеется множество путей прохождения зонда). Это устройство слежения может иметь любую известную конструкцию и применять любой известный принцип измерения. Оно может, в частности, быть оптической системой определения местоположения, определяющей положение детектора в соответствии со стереоскопическими принципами по изображениям трех и более камер.
Изобретение дополнительно относится к медицинской системе, содержащей хирургический инструмент, в частности, катетер, эндоскоп или иглу, и дополнительно содержащей систему определения местоположения типа, описанного выше, в которой выход сигнала в такой системе определения местоположения крепится к инструменту. Если инструментом является катетер, она может иметь, например, волновод, по которому компонент электромагнитного сигнала, проходящий по пути прохождения зонда, распространяется к наконечнику катетера, где упомянутый волновод имеет выход сигнала, из которого электромагнитный сигнал излучается в окружающую ткань. Один или более детекторов системы определения местоположения могут в этом случае быть устройствами, которые можно накладывать на кожу пациента.
Изобретение дополнительно относится к способу для определения местоположения интересующей точки в пространстве, содержащему этапы, на которых:
a) разветвляют электромагнитный сигнал на компоненты, распространяющиеся, по меньшей мере, по одному пути прохождения зонда и по базовому пути соответственно;
b) в пути прохождения, по меньшей мере, одного зонда:
- излучают компонент электромагнитного сигнала пути прохождения зонда с выхода сигнала, расположенного в интересующей точке;
- регистрируют излученный компонент электромагнитного сигнала с помощью детектора;
c) определяют корреляцию между компонентами электромагнитного сигнала, распространяющимися по пути прохождения зонда и по базовому пути соответственно;
d) оценивают местоположение выхода сигнала относительно детектора, основываясь на определенной корреляции.
Способ содержит в общей форме этапы, которые могут быть выполнены с помощью системы определения местоположения описанного выше типа. Поэтому делается ссылка на предшествующее описание для получения большей информации о подробностях, преимуществах и усовершенствованиях этого способа.
Изобретение дополнительно относится к компьютерной программе, позволяющей выполнение этапов с) и/или d) такого способа, как описано выше, то есть определения корреляции между компонентами электромагнитного сигнала, которые распространяются по пути прохождения зонда и по базовому пути соответственно, и/или оценки определения местоположения выхода сигнала относительно детектора, основываясь на упомянутой определенной корреляции, в котором выход сигнала и детектор являются последовательными точками на пути прохождения зонда.
Изобретение содержит машиночитаемый носитель данных, например, дискету, жесткий диск или компакт-диск (CD), на котором хранится компьютерная программа упомянутого выше типа.
Эти и другие аспекты изобретения будут понятны и объяснены со ссылкой на вариант(-ы) осуществления, описанный далее. Эти варианты осуществления будут описаны посредством примера с помощью одного сопроводительного чертежа, схематично показывающего систему определения местоположения, соответствующую настоящему изобретению.
Хотя система определения местоположения представлена в отношении медицинского применения, в частности, движения катетера 2 через сосудистую систему 1 пациента, изобретение не ограничивается этой областью.
Существующие технологии слежения с помощью механических, оптических и магнитных устройств имеют существенные ограничения. Механические системы слежения требуют жесткого крепления инструментов к неподвижной опорной раме (например, к операционному столу) с использованием ряда соединителей, которые позволяют манипулировать инструментом. Этот подход пригоден только для соответствующих жестких инструментов и может значительно ограничивать диапазон движения/эргономику. Оптические системы слежения, в которых светоизлучающие или отражающие маркеры прикрепляют к хирургическим инструментам и используют камеры, чтобы триангулировать положение инструмента, также пригодны только для жестких инструментов и требуют непрерывного поддержания линии прямой видимости между маркерами и камерами. Магнитные системы слежения используют переменные магнитные поля для наведения токов в катушках датчика. Эта технология не требует линии прямой видимости и может использоваться для слежения за гибкими устройствами, но ее точность существенно хуже, чем при оптических способах слежения, и такие системы имеют трудности при работе вблизи металлических предметов, искажающих магнитные поля.
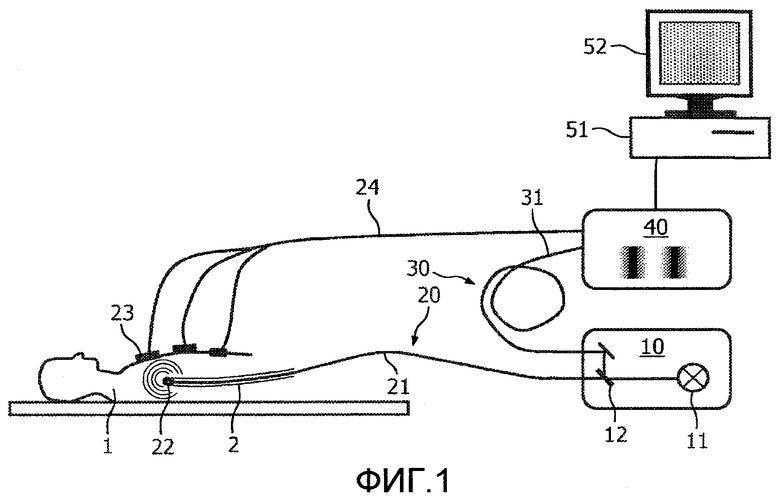
С точки зрения этих проблем, здесь предлагается новый подход к внутрипроцедурному слежению за медицинским устройством, который позволяет достигнуть существенных, клинически важных усовершенствований существующей технологии. Система определения местоположения, соответствующая этому предложению, показана на чертеже и содержит следующие компоненты:
- источник 10 электромагнитных волн (широкополосный) низкой когерентности с генератором 11 электромагнитных волн (например, светодиод или галогеновая лампа), который генерирует электромагнитный сигнал с заданными спектральными характеристиками, содержащими частоты, которые могут успешно проходить через биологическую ткань (то есть частоты, для которых ткань представляется, по меньшей мере, частично прозрачной). Этот электромагнитный сигнал делится светоделителем 12 на два компонента, которые распространяются по "пути 20 прохождения зонда" и "базовому пути 30" соответственно, причем базовый путь имеет известную длину.
В вышеупомянутом пути 20 прохождения зонда система содержит:
- первый широкополосный волновод 21, который начинается от источника 10 электромагнитных волн, проходит по сердечному катетеру 2 через тело пациента 1 и заканчивается на наконечнике катетера 2;
- выход 22 сигнала на дистальном конце первого волновода 21, из которого компонент сигнала, проходящий по пути прохождения зонда, излучается в окружающую кровь/ткань;
- множество детекторов 23 облучения кожи, каждый из которых выполнен с возможностью обнаружения вектора поляризации принятого сигнала, то есть компонента сигнала для пути прохождения зонда, излучаемого на выходе 22 сигнала. Детекторы 23, как вариант, содержат трехосные детекторы, чувствительные к ортогональной поляризации (например, три ортогональных диполя). Измерения амплитуды и фазы сигналов, принятых каждым диполем, затем обеспечивают необходимую информацию для точного определения угла относительно излучателя (диполя) передатчика и каждого детектора на коже;
- несколько вторых широкополосных волноводов 24, которые направляют компонент сигнала, принятый детекторами 23, к интерферометру 40.
В базовом пути 30 система содержит
- третий широкополосный волновод 31, начинающийся от источника 10 электромагнитных волн и заканчивающийся у интерферометра 40.
Система определения местоположения дополнительно содержит:
- упомянутый интерферометр 40, служащий в качестве коррелятора и обрабатывающий оптические сигналы пути прохождения зонда и базового пути соответственно, которые приходят по второму и третьему волноводам 24 и 31;
- персональный компьютер 51 или автоматизированное рабочее место, которое использует результаты измерения интерферометрии, чтобы вычислять трехмерное положение/ориентацию катетера 2 с высоким временным и пространственным разрешением, и, как вариант, представляет их на внутрипроцедурном дисплее 52.
Существенным компонентом системы является коррелятор или интерферометр 40. Интерферометрия является процессом объединения сигналов с волновой структурой таким способом, что волны "взаимодействуют" друг с другом, объединяясь со сложением и/или вычитанием. Результатом является интерферограмма, потенциально содержащая полезную количественную информацию. Интерферометрия с низкой когерентностью является способом, содержащим использование источника электромагнитных волн с низкой временной когерентностью, типа белого света, для создания двух сигналов; один сигнал используется в качестве опорного сигнала, а другой сигнал используется как "зондирующий" (сравните, Yang, C.H., Wax, A., Dasari, R.R., Feld, М.S.: "2 pi ambiguity-free optical distance measurement with subnanometer precision with a novel phase-crossing low-coherence interferometer", Optics Letters 27, 77-79 (2002)). Два сигнала затем заново объединяются, и результирующая интерферограмма благодаря малым фазовым и/или амплитудным изменениям, испытываемым зондирующим сигналом, позволяет выполнять количественные измерения. Одним из применений интерферометрии с низкой когерентностью в медицинской области является способ получения изображения, называемый "оптическая когерентная томография" (OCT) (сравните AF. Fercher, K. Mengedoht, W. Werner: "Eye length measurement by interferometry with partially coherent light", Optics Letters 13, 186-188 (1988); D. Huang, E.A. Swanson, C.P. Lin, et al: "Optical Coherence Tomography", Science, том 254, № 5035, стр. 1178-1181, 1991; WO 2003011764 A2).
Тот же самый принцип, который позволяет с помощью OCT измерять глубину анатомических границ (то есть анатомические признаки, которые отражают часть оптического сигнала зонда), используется предложенной системой определения местоположения для измерения положения медицинских устройств во время минимально инвазивной хирургической процедуры. Как показано в приведенном на чертеже примере, электромагнитный компонент "сигнала зонда" направляется с этой целью через устройство (здесь катетер 2), используя электромагнитные волноводы (21), и излучается из наконечника устройства; он собирается электромагнитными детекторами (23) на коже пациента и направляется назад к интерферометру (40), где объединяется с компонентом базового сигнала, который направляется непосредственно от источника (10) по волноводу (31) с известной длиной. Интерферограмма в интерферометре затем обеспечивает информацию об относительной разности длин путей, которые были пройдены компонентами базового сигнала и зонда; этот тип измерения, выполненный многочисленными детекторами на коже пациента, позволит вычислять положение устройства с помощью осевого пространственного разрешения, пропорционального ширине полосы электромагнитного сигнала.
Поскольку наконечник устройства, подобного катетеру 2, может прослеживаться внутри тела пациента, описанный способ пригоден для гибких инструментов (например, катетеров, эндоскопов и гибких игл). И поскольку не имеется требования по линии прямой видимости или жесткого крепления к неподвижной опорной раме, предложенная технология не оказывает негативного влияния на последовательность операций или не ограничивает диапазон движения. Дополнительно, электромагнитный сигнал с низкой когерентностью позволяет охарактеризовать и внести коррекции при работе с нелинейными электрическими свойствами биологической ткани и/или хирургической средой. Измерения на основе интерферометрии (положение и ориентация устройства) могут быть выполнены с чрезвычайно высоким пространственным разрешением.
Градуировочный способ может применяться, чтобы установить относительные положения и углы наклоны детекторов 23, находящихся на коже, которые должны быть известны персональному компьютеру 51, чтобы сделать возможной желаемую триангуляцию катетера 2. Градуировочный способ может использовать предшествующее или получаемое во время операции изображение, например, рентгеноскопию, компьютерную томографию (CT), магниторезонансную томографию (MRI) или подобное. Альтернативно, он может использовать стандартное (например, оптическое) устройство слежения для измерения положений детекторов 23, расположенных на коже.
Как вариант, для оптимизации точности слежения может использоваться способ коррекции различий в свойствах ткани (то есть диэлектрической постоянной).
Приведенный далее математический алгоритм, осуществляемый в прикладном программном обеспечении, которое будет работать на персональном компьютере 51, может использоваться для анализа результатов измерений интерферометра 40 и решать задачу определения относительного положения и угла наклона внутрипроцедурного устройства 2 относительно расположенных на теле датчиков 23. Алгоритм использует определение когерентности как среднего значения преобразования Фурье для нормализованной взаимной корреляции:
где Sxy(f) - спектральная плотность мощности взаимной корреляции rxy(τ) сигналов (взаимодействующих сигналов) и cxy - коэффициент когерентности для сигналов x и y, fmax, fmin - максимальная и минимальная частоты сигнала соответственно. "Сигнал с низкой когерентностью" принимает высокое значение для выражения (fmax-fmin).
Нахождение относительного положения выхода 22 сигнала относительно детектора 23 эквивалентно нахождению значения τ, которое максимизирует спектральную плотность мощности Sxy(f) для любой f∈[fmax-fmin]. Как указано выше, эта задача должна решаться поддерживающим программным обеспечением, работающим на местном персональном компьютере.
Следует отметить, что осевое пространственное разрешение Δx/x измерения выражается следующим образом:

где 
Описанная оценка результатов измерений требует следующих модулей:
- алгоритм FFT, способный к обработке данных взаимной корреляции;
- алгоритм симплекса, требующийся для максимизирования спектральной плотности мощности, определенной для каждого участника взаимодействия;
- алгоритм оценки амплитуды и фазы для каждой поляризационной ориентации приемников (диполей) внутри каждого расположенного на теле датчика 23;
- алгоритм обработки упомянутого выше для определения угла наклона катетера для каждого расположенного на теле датчика.
Предложенная технология слежения обеспечивает функциональные возможности, являющиеся критичными для обеспечения возможности и улучшения минимально инвазивной хирургической процедуры, например, сердечно-сосудистой процедуры на основе использования катетера и процедуры биопсии с использованием иглы/ампутации. Первичной способностью, обеспечиваемой внутрипроцедурным устройством слежения, является способность расширять и оптимизировать внутрипроцедурную визуализацию медицинских данных изображения. Наиболее подходящий срез/объем изображения может быть выбран автоматически, основываясь на текущем положении хирургического устройства, и данные изображения могут быть расширены добавлением графики, которая ясно указывает в реальном масштабе времени положение хирургических инструментов относительно интересующих анатомических структур. Активное устройство слежения также позволяет получать внутрипроцедурные изображения, подлежащие оптимизации (например, плоскость сканирования и параметры получения изображения могут обновляться на основе текущего положения/движения устройства). Кроме того, слежение за положением и движением внутренних устройств позволяет характеризовать и компенсировать физиологическое движение (то есть кардиальное и респираторное движение).
Наконец, следует указать, что в настоящей заявке термин "содержащий" не исключает другие элементы или этапы, что единственное число не исключает множественное число и что одиночный процессор или другой блок может выполнять функции нескольких средств. Изобретение постоянно присутствует в любом и каждом новом характеристическом признаке и в любой и каждой комбинации характеристических признаков. Кроме того, ссылочные знаки в пунктах формулы изобретения не должны рассматриваться как ограничивающие их объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СПОСОБ ВЫДЕЛЕНИЯ СИГНАЛА | 2011 |
|
RU2460102C1 |
| ЧУВСТВИТЕЛЬНЫЙ К ФОРМЕ УЛЬТРАЗВУКОВОЙ ЗОНД | 2014 |
|
RU2699331C2 |
| СПОСОБ ФИЛЬТРАЦИИ ФОТОНОВ ОТ ОСТАТОЧНОГО ИЗЛУЧЕНИЯ КОГЕРЕНТНОЙ НАКАЧКИ | 2021 |
|
RU2783222C1 |
| СПОСОБЫ ОЦЕНКИ СООТВЕТСТВИЯ НОРМЕ БИОЛОГИЧЕСКОЙ ТКАНИ | 2014 |
|
RU2665189C2 |
| ИНТЕГРАЦИЯ ОПТОВОЛОКОННОГО ОПРЕДЕЛЕНИЯ ФОРМЫ В ИНТЕРВЕНЦИОННУЮ СРЕДУ | 2012 |
|
RU2594814C2 |
| УСТРОЙСТВО И СПОСОБ ИСПОЛЬЗОВАНИЯ ВСТРЕЧНО-РАСПРОСТРАНЯЮЩЕГОСЯ СИГНАЛА ДЛЯ ЛОКАЛИЗАЦИИ СОБЫТИЙ | 2005 |
|
RU2398185C2 |
| ТРЕХМЕРНОЕ ПОЛИЛИНЕЙНОЕ СОВМЕЩЕНИЕ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧЕНИЙ ФОРМЫ | 2013 |
|
RU2638445C2 |
| ЭНЕРГОНЕЗАВИСИМОЕ, РЕКОНФИГУРИРУЕМОЕ, ОПТИЧЕСКОЕ УСТРОЙСТВО ФИЛЬТРАЦИИ | 2024 |
|
RU2828251C1 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2006 |
|
RU2396578C2 |
| ЭЛЕКТРОМАГНИТНЫЙ МИКРОВОЛНОВЫЙ ИЗЛУЧАЮЩИЙ ДВА ЛИНЕЙНО ПОЛЯРИЗОВАННЫХ ПУЧКА В СТОРОНУ ЦЕЛИ ИНТЕРФЕРОМЕТР | 2011 |
|
RU2482446C1 |
Изобретение относится к медицинской технике, а именно к системам и способам определения местоположения хирургического инструмента в теле пациента. Система содержит источник электромагнитных волн для разделения электромагнитного сигнала с частотой в диапазоне от 1 кГц до 100 ГГц на компоненты, распространяющиеся по одному пути прохождения зонда и по базовому пути, при этом путь прохождения зонда имеет выход сигнала на источнике электромагнитных волн или на конце волновода, детектор, коррелятор и блок оценки для определения местоположения выхода сигнала относительно детектора, основываясь на определенной корреляции. Медицинская система, содержащая хирургический инструмент, в частности катетер, эндоскоп или иглу, включает также систему определения положения, при этом осуществляется способ определения местоположения интересующей точки с использованием машиночитаемого носителя данных, на котором хранится компьютерная программа. 4 н. и 5 з.п. ф-лы, 1 ил.
1. Система определения местоположения, содержащая
a) источник (10) электромагнитных волн для разделения электромагнитного сигнала с частотой в диапазоне приблизительно от 1 кГц до 100 ГГц на компоненты, распространяющиеся, по меньшей мере, по одному пути (20) прохождения зонда и по базовому пути (30);
b) по меньшей мере, один путь (20) прохождения зонда, имеющий выход (22) сигнала для излучения компонента электромагнитного сигнала, распространяющегося по пути прохождения зонда, в интересующей точке;
детектор (23) для регистрации излучаемого компонента электромагнитного сигнала;
c) коррелятор (40) для определения корреляции между компонентами электромагнитного сигнала, которые распространяются по пути прохождения зонда и базовому пути соответственно;
d) блок (51) оценки для оценки местоположения выхода (22) сигнала относительно детектора (23), основываясь на определенной корреляции.
2. Система определения местоположения по п.1, отличающаяся тем, что она содержит, по меньшей мере, два, предпочтительно, по меньшей мере, три пути (20) прохождения зонда, которые совместно используют выход (22) сигнала, но имеют индивидуальные детекторы (23) в различных положениях.
3. Система определения местоположения по п.1,
отличающаяся тем, что детектор (23) чувствителен во всех пространственных направлениях.
4. Система определения местоположения по п.1,
отличающаяся тем, что источник (10) электромагнитных волн является источником волн с низкой когерентностью.
5. Система определения местоположения по п.1, отличающаяся тем, что содержит, по меньшей мере, один волновод (21) для соединения источника (10) электромагнитных волн с выходом (22) сигнала, детектора (23) с коррелятором (40) и/или источника (10) электромагнитных волн с коррелятором (40).
6. Система определения местоположения по п.1,
отличающаяся тем, что содержит устройство слежения для слежения за пространственным положением и/или ориентацией детектора (23).
7. Медицинская система, содержащая
хирургический инструмент, в частности катетер (2), эндоскоп или иглу;
систему определения местоположения по п.1 с выходом (22) сигнала, прикрепленным к инструменту.
8. Способ определения местоположения интересующей точки, содержащий этапы, на которых:
a) разделяют электромагнитный сигнал с частотой в диапазоне приблизительно от 1 кГц до 100 ГГц на компоненты, распространяющиеся, по меньшей мере, по одному пути (20) прохождения зонда и по базовому пути (30);
b) по меньшей мере, в одном пути прохождения зонда:
- излучают компонент электромагнитного сигнала, распространяющийся по пути прохождения зонда, с выхода (22) сигнала, расположенного в интересующей точке;
- регистрируют излученный компонент электромагнитного сигнала с помощью детектора (23);
c) определяют корреляцию между компонентами электромагнитного сигнала, которые распространяются по пути прохождения зонда и по базовому пути соответственно;
d) оценивают местоположение выхода сигнала относительно детектора на основе определенной корреляции.
9. Машиночитаемый носитель данных, на котором хранится компьютерная программа, которая при исполнении компьютером побуждает компьютер выполнять этапы с) и/или d) способа по п.8.
| WO 2005051187 A2, 09.06.2005 | |||
| US 5541730 A, 30.07.1996 | |||
| US 2006276709 A1, 07.12.2006 | |||
| МИКРОВОЛНОВОЕ ТОМОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СПЕКТРОСКОПИИ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2238033C2 |

