Изобретение относится к технологии сейсмической разведки и сейсморазведочному построению представления подземных слоев. Оно, в частности, но не исключительно, относится к подводной сейсмической разведке, по результатам которой составляют отчеты сейсмометрического исследования подводных геологических структур, однако его также можно применять на суше, в частности в труднодоступных районах.
Обычные сейсмические способы разведки подземных пластов, расположенных ниже морского дна, подразумевают генерирование сейсмической волны и измерение отклика. Сейсмическая волна может быть простой или сложной и может генерироваться на уровне моря, под поверхностью воды или на морском дне. Отклик детектируют с использованием последовательности разнесенных приемников, которые обычно расположены на тросах, буксируемых позади исследовательского судна. Обычно приемники удерживают неподвижными в течение этапа детектирования и затем перемещают в другое местоположение, в котором процесс повторяют.
Отклик на сейсмическое событие в твердой породе на морском дне включает в себя волну сжатия (Р-волну) и поперечную волну (S-волну). Считается, что Р-волны хорошо подходят для формирования изображения структур, в то время как комбинации S-волн хорошо подходят для определения характеристик пород и текучих сред. Р-волны распространяются через породу и морскую воду, в то время как S-волны распространяются только через породу. Таким образом, если приемники представляют собой гидрофоны, плавающие на поверхности или расположенные ниже поверхности, они будут детектировать только Р-волны. Для детектирования S-волн необходимо использовать геофоны, расположенные на морском дне.
Также существуют проблемы на суше, когда местность является неблагоприятной для развертывания приемников, что возможно, например, в условиях пустыни, в горных областях, в условиях тундры или в других экстремальных условиях.
Считается, что лучшие результаты представления сейсморазведочного построения могут быть получены путем одновременного использования Р-волн и S-волн. Однако считается, что затраты, связанные с развертыванием и повторным развертыванием геофонов на морском дне, в дополнение к использованию гидрофонов, или в труднодоступных наземных областях являются чрезмерно большими и не позволяют выполнять такую разведку. В частности, это связано с тем, что для эффективного детектирования S-волн требуется использовать три независимых ортогональных геофона в каждом месторасположении записи.
В течение более 10 лет было известно, что 4С (четырехкомпонентное) сейсморазведочное построение представления нижних горизонтов при применении на море позволяет добавить дополнительную и более качественную информацию для поисково-разведочных работ благодаря высокому качеству записи поперечных волн (S-волн) на дне моря. К сожалению, 4С-построение представления не получило ожидаемого успеха, прежде всего из-за комбинации чрезвычайно высоких затрат на съемку данных и неопределенностей при прогнозировании воспроизведения. Фактор затрат связан с проблемами доступности технологий съемки данных.
4С запись обычно осуществляют с помощью гидрофона и трех независимых ортогональных геофонов. Геофоны соединены с морским дном и поэтому они чувствительны к скоростям частиц, генерируемым как сейсмическими р-волнами, так и s-волнами. В таких технологиях используются либо сенсорные кабели на морском дне, или узлы геофонов, установленные или заглубленные на морском дне. 4С сейсмическая съемка состоит из последовательности операций перемещения источника и перемещения приемника. После того, как независимое судно - источник выполнит съемку последовательности профилей сейсмических исследований, находящееся на дне оборудование необходимо переместить в следующее положение. Из-за наличия такого статического компонента записи, используемого при съемке данных, и из-за ограниченного количества доступных приемников такие 4С системы съемки становятся неэффективными. В связи с физическими проблемами, связанными с перемещением тяжелого оборудования вдоль морского дна и необходимостью соединения геофонов оказывается отрицательное влияние на надежность.
Наконец, также считается, что эффективность по затратам при выполнении такого сейсморазведочного построения, и, в частности, при измерениях S-волны можно было бы значительно уменьшить в случае исключения необходимости размещения устройства детектирования на морском дне, то есть при измерении S-волны из положения, которое находится на расстоянии от морского дна, и, таким образом, обеспечивает возможность эффективной смены положения устройства детектирования относительно морского дна. Это относится также к сейсморазведочному построению представлений в труднодоступных наземных местностях.
Однако, как упомянуто выше, S-волны не распространяются ни через морскую воду, ни через атмосферу, что делает невозможным непосредственную съемку на расстоянии от морского дна или от поверхности земли. С дистанционной съемкой, кроме того, связаны собственные проблемы, состоящие в том, что устройство детектирования подвергается воздействию океанских течений или атмосферных условий, которые могут затруднить эффективную установку положения устройства детектирования и могут вводить шум в измерения, что сильно затрудняет корреляцию результатов.
Таким образом, цель настоящего изобретения состоит в создании способа сейсмической разведки, в котором детектируют как Р-волны, так и S-волны, но который является более простым и менее затратным, чем известные технологии.
В соответствии с одним аспектом изобретения предложен способ сейсмической разведки, который содержит этапы, на которых генерируют сейсмическое событие; применяют сейсмическое событие к поверхности земли; используя интерферометр, детектируют отклик на событие, в котором присутствует относительное движение между поверхностью земли и интерферометром, причем детектируемый отклик включает в себя Р-волны и S-волны на поверхности земли; и анализируют детектируемый отклик; и в котором: этап детектирования включает выполнение мониторинга и запись отклика на сейсмическое событие в форме перемещения частиц на поверхности земли из положения, расположенного на расстоянии от поверхности земли, при этом этап детектирования выполняют в течение периода отклика, период отклика представляет собой заданный период времени после сейсмического события; при этом этап анализа включает анализ перемещений частиц на поверхности земли в записанном отклике на сейсмическое событие в течение периода отклика; причем упомянутое относительное движение имеет полную скорость Vtot, которая включает в себя трансверсальный или поперечный компонент Vt и продольный компонент V1; работа интерферометра включает в себя направление объектного луча когерентного света в место измерения на поверхности земли, благодаря чему происходит относительное перемещение между поверхностью и местом измерения; устанавливают массив детекторов интерферометра в линию, продолжающуюся, в общем, в поперечном направлении, причем детекторы выполнены с возможностью детектирования лучей света с разными угловыми направлениями, представляющими разные направления чувствительности; формируют опорный луч когерентного света, который, по меньшей мере, частично является когерентным с объектным лучом; комбинируют опорный луч с объектным лучом, отраженным от поверхности, для формирования взаимной интерференции в спекл-структуре, представляющей информацию об относительном движении поверхности и интерферометра; детектируют спекл-структуры и взаимную интерференцию с помощью детекторов; определяют, какой из детекторов в массиве имеет нулевую или минимальную чувствительность к полной скорости Vtot движения, идентифицируя, таким образом, детектор с линией направления чувствительности, которая расположена нормально Vtot; выполняют мониторинг временного изменения, при котором детекторы имеют нулевую или минимальную чувствительность, устанавливая, таким образом, изменения направления Vtot с течением времени, связанные с изменениями V1; и определяют временные изменения значения V1.
В соответствии с другим аспектом изобретения предложено устройство, осуществляющее сейсмическую разведку, которое содержит: средство генерирования сейсмического события; средство приложения сейсмического события к поверхности земли; интерферометр, предназначенный для детектирования отклика на событие, включающего в себя Р-волны и S-волны на поверхности земли, в котором присутствует относительное движение между поверхностью земли и интерферометром; и средство анализа детектируемого отклика; и в котором: интерферометр выполнен с возможностью проведения мониторинга и записи отклика на сейсмическое событие в форме движения частиц на поверхности земли из положения, находящегося на расстоянии от поверхности земли, в течение заданного периода отклика после сейсмического события; упомянутое относительное движение имеет полную скорость Vtot, которая включает в себя трансверсальный или поперечный компонент Vt и продольный компонент V1, причем интерферометр содержит: средство направления объектного луча когерентного света в место измерения на поверхности земли, благодаря чему присутствует относительное движение между поверхностью и местом измерения; массив детекторов на интерферометре, расположенных в линию, продолжающуюся, в общем, в поперечном направлении, причем детекторы выполнены с возможностью детектирования лучей света с разными угловыми направлениями, представляющими разные направления чувствительности; средство формирования опорного луча когерентного света, который, по меньшей мере, частично является когерентным с объектным лучом; средство комбинирования опорного луча с объектным лучом, отраженным от поверхности, для формирования взаимной интерференции в спекл-структуре, представляющей информацию об относительном движении поверхности и интерферометра; средство детектирования спекл-структуры и структуры взаимной интерференции с помощью детекторов; средство определения, какой из детекторов в массиве имеет нулевую или минимальную чувствительность к полной скорости Vtot движения, идентифицируя, таким образом, детектор с линией направления чувствительности, которая расположена нормально Vtot; средство мониторинга временного изменения, который из детекторов имеет нулевую или минимальную чувствительность, в соответствии с чем устанавливают изменения направления Vtot с течением времени, связанные с изменениями V1, и средство определения временных изменений V1.
Изобретение также направлено на способ составления отчета сейсмической разведки с использованием способа и/или устройства, описанных выше, а также на отчет, формируемый таким образом.
Частицы на поверхности реагируют как на толчки Р-волны, так и на толчки S-волны и поэтому их движения будут представлять эти две волны. Поскольку эти движения детектируют на расстоянии, недостатки предшествующего уровня техники исключаются, и при этом нет необходимости находиться в контакте с поверхностью и, поэтому, нет необходимости отсоединения устройства детектирования от поверхности перед сменой положения.
Предпочтительно, объектный луч и опорный луч излучают из интерферометра. Интерферометр может постоянно двигаться в поперечном направлении, а поверхность может двигаться относительно прерывисто в направлении, которое может быть другим, чем поперечное направление.
Предпочтительно, лучи когерентного света представляют собой лучи лазера. Предпочтительно, объектный луч расширен так, что он освещает исследуемый объект.
Место измерения может представлять собой точку или линию на поверхности исследуемого объекта. Каждый детектор в массиве предпочтительно состоит из линии детекторов, проходящей в общем параллельно или в общем под прямым углом к поперечному направлению. Детекторы могут иметь вид массива детекторов, охватывающего все поле исследования. Предпочтительно, лучи света подвергают обработке для формирования изображения с использованием оптических средств непосредственно перед детектированием с помощью детекторов. Оптическое средство формирования изображения может содержать систему линз или изогнутых зеркал.
Предпочтительно, каждый элемент детектора содержит линию отдельных детекторов, и, предпочтительно, эта линия расположена параллельно или поперечно поперечной линии детекторов, и детекторы содержат массив детекторов, охватывающий все поле исследования. Интерферометр может включать в себя оптическое средство формирования изображения перед линией детекторов; оптическое средство формирования изображения содержит линзу, систему линз или изогнутые зеркала формирования изображения.
Можно использовать несколько интерферометров, которые могут применяться одновременно в разных местах. Предпочтительно, отклик преобразуют в цифровую форму и записывают в этой форме. Предпочтительно, этап анализа содержит анализ смещений и/или скоростей, и/или ускорений частиц на поверхности.
Z-компонент скорости частиц на поверхности при применении под водой аналогичен компоненту давления, который измеряют с использованием гидрофона, установленного на устройстве мониторинга. Такое избыточное измерение можно использовать для калибровки системы и для того, чтобы сделать ее более устойчивой к ошибкам при воздействии окружающих шумов и шумов системы. Эквивалентную компоновку можно использовать на суше.
Отраженный свет, рассеиваемый поверхностью земли, представляет собой совместный вклад множества рассеянных сейсмических импульсов, которые имеют постоянную относительную фазу, определяемую длиной оптического пути от каждой точки на поверхности. При комбинировании отраженного света с использованием когерентного опорного луча создают сложную структуру интерференции в результате разности длины оптического пути при отражении от поверхности. Исходный этап обработки данных формирующих изображения, на котором структуру интерференции вычитают из известного опорного изображения, выявляет временную прогрессию трехмерного смещения частиц в результате сейсмического события. Кроме того, отношение сигнал-шум может быть улучшено путем выбора множества опорных изображений для снижения эффекта декорреляции спеклов. На конечном этапе обработки изображения получают сигнал абсолютной интенсивности изменения оптического пути в результате трхмерного смещения частиц. Наконец, сигнал интенсивности затем подвергают этапам обработки сигналов, которые позволяют восстановить сигналы сейсмической S-волны, о которых идет здесь речь.
Из-за относительного движения между поверхностью и интерферометром спекл-структура, видимая детектором света, может изменяться в течение сейсмического времени. Когда инструмент движется, спекл-структура движется очень быстро и поэтому мониторинг спеклов должен осуществляться гораздо чаще, чем каждую 1 мс, для обеспечения возможности детектирования/распознавания и тем самым выполнения мониторинга одной и той же группы спеклов каждую миллисекунду.
Из-за длин сейсмических волн скорость частиц может быть синфазна в пределах диска 5 м на поверхности. Поэтому группы пространственно распределенных инструментов можно использовать для повышения отношения сигнал - шум в одном канале сейсмической записи.
Изобретение, в частности, пригодно для сейсмических исследований на море, в которых поверхность земли представляет собой морское дно, при этом сейсмическое событие применяют в море или непосредственно к морскому дну и интерферометр располагают над морским дном. Предпочтительно, интерферометр располагается на расстоянии от 1 до 15 метров над дном моря во время периода отклика и может дополнительно включать в себя гидрофон для отдельной записи Р-волн. Однако изобретение также может применяться на суше, в местности с преобладающими труднодоступными условиями. В таком случае интерферометр располагается над поверхностью суши.
Инструмент может быть буксируемым, например, может быть выполнен как сейсморазведочный кабель, буксируемый позади надводного или подводного судна, или наземного транспортного средства, или самолета. Таким образом, может присутствовать множество интерферометров, установленных на множестве тросов, при этом инструменты на каждом тросе, предпочтительно, отнесены друг от друга на расстояние, которое меньше чем длина волны передаваемого сейсмического события, для предотвращения пространственного искажения записываемого волнового поля. В качестве альтернативы, инструмент (инструменты) могут быть расположены на самодвижущемся подводном судне, наземных транспортных средствах или на самолете. В такой компоновке транспортное средство, судно или самолет, предпочтительно, являются непилотируемыми и, предпочтительно, включают в себя РЧ передатчик/приемник и антенну, акустический модем, датчик в акустическом корпусе, донный датчик, датчик глубины и систему акустического отслеживания, в дополнение к интерферометру. В любом случае этап анализа должен включать в себя исключение из детектируемого отклика шумов, представляющих помехи, вызванные движением интерферометра.
Такое движение может измеряться с использованием трех независимых акселерометров, и затем его можно вычитать из относительного движения, измеряемого инструментом.
Предпочтительно, частицы, движение которых детектируется, представляют собой частицы песка на морском дне или на суше.
Предпочтительно, сейсмическое событие содержит сейсмическую волну, имеющую длину волны в диапазоне 5-100 м и длительность от 2 мс до 1000 мс. В зависимости от глубины цели разведки и сейсмических Р- и S-скоростей, предпочтительно, период отклика составляет от 5 до 20 секунд. Сейсмическое событие может быть сформировано с использованием устройства, расположенного на поверхности морского судна. Оно может быть сформировано на поверхности или под поверхностью океана. Событие может генерироваться на морском дне с использованием сейсмических источников, в которых применяются принципы наземных сейсмических источников, и в этом случае могут генерироваться Р- и S-волны. В качестве альтернативы, они могут генерироваться на суше любым известным способом.
Интерферометр, предпочтительно, движется в течение периода передачи со скоростью в диапазоне 1-5 м/с, более предпочтительно 3-4 м/с.Частота выборки, предпочтительно, составляет 1-2 мс.
Очевидно, что, поскольку интерферометр движется в воде во время записи, добавляется нежелательный динамический компонент (шумы буксировки). Части этого шума могут быть отделены от записи с использованием стандартного временного и пространственного фильтров. Шумы, которые попадают внутрь частотного диапазона скорости частиц, должны быть рассчитаны/спрогнозированы прежде, чем их можно будет удалить.
Относительное движение судов/транспортных средств/самолетов/тросов можно частично прогнозировать/устранять путем обработки данных от нескольких интерферометров, которые одновременно, но в разных местах, в большей или меньшей степени, записывают одну и ту же часть волнового фронта. Это может быть достигнуто с использованием промежутка между инструментами, который меньше чем длина волны сейсмической волны. Если разрешающая способность при записи будет достаточно хорошей, в результате анализа изображения может быть получено относительное расположение инструментов и, таким образом, можно прогнозировать шумы буксировки.
ОВМ можно буксировать с аналогичной геометрией, как при расстановке датчиков морского сейсморазведочного кабеля с использованием множества морских сейсморазведочных кабелей, применяемых для сейсмической съемки только Р-волны, но на глубине, как можно более близкой к морскому дну или поверхности суши.
Изобретение может осуществляться на практике различными способами, и некоторые варианты воплощения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых:
на фигуре 1 показана схема общей системы, используемой на море;
на фигурах 2, 3 и 4 схематично показаны виды в плане трех разных схем съемки данных.
на фигуре 5 схематично показан вид, представляющий общие принципы изобретения;
на фигуре 6 показано графическое представление одного способа, с помощью которого принимаемые сигналы могут появляться вдоль линии детекторов;
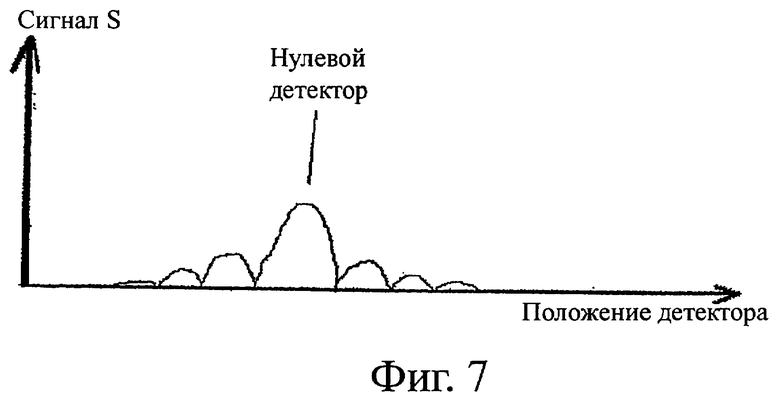
на фигуре 7 представлена модифицированная форма кривой, показанной на фигуре 6;
на фигуре 8 показан вид, аналогичный фигуре 5, представляющий изобретение, применяемое для детектирования сейсмических сигналов на морском дне;
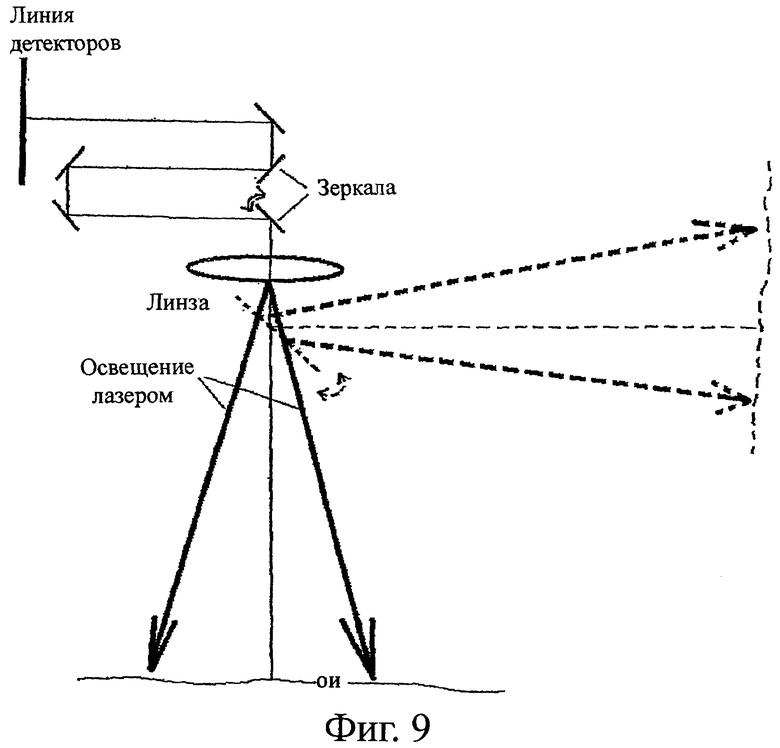
на фигуре 9 показано использование оптических элементов для модификации системы;
на фигуре 10 показан альтернативный вариант воплощения;
на фигуре 11 более конкретно представлена линия чувствительности для детектора;
на фигуре 12 более конкретно показано детектирование сейсмических сигналов на морском дне;
на фигуре 13 показаны две альтернативных конфигурации линз, предназначенных для использования в изобретении;
на фигуре 14 представлено использование модуляции фазы опорного луча для компенсации движения интерферометра;
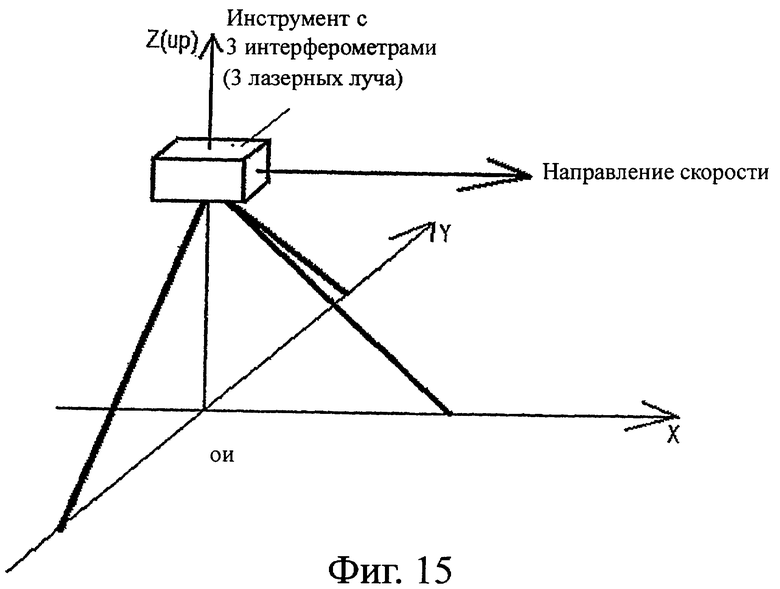
на фигуре 15 показано применение изобретения для 3трехмерных измерений.
На фигуре 1 представлена операция, управляемая на поверхности воды судном 11. Сейсмический источник 12 расположен на морском дне 13, и последовательность мобильных модулей 14 инструментов (из которых показаны два), выполняет мониторинг отклика на морском дне 13 сейсмической волны, генерируемой источником 12. Модули 14 инструментов расположены на расстоянии приблизительно метр над морским дном 13.
Каждый из модулей 14 инструментов включает в себя интерферометр, состоящий из передатчика и приемника света, гидрофон, акселерометр и модуль обработки данных. Его работа будет описана ниже.
Гидрофон используется для измерения сейсмических Р-волн над дном 13 моря. Акселерометр измеряет колебания инструмента в диапазоне 0-200 Гц. Модуль обработки данных предназначен для фильтрации шумов из получаемых результатов измерений, для распознавания и детектирования объектов изображения, для измерения величин объектов изображения и преобразования этих величин в скорости частиц.
При использовании источник 12 генерирует сейсмическую волну с откликом, который длится в течение периода 5-20 секунд, который распространяется через подстилающую породу 15 как Р- и S-волны. Исходная сейсмическая волна отражается и/или преломляется на различных границах пластов, и возвратные Р- и S-волны приводят к колебаниям в диапазоне до 200 Гц морского дна 13, поверхность которого включает в себя ил, песок и камни. Интерферометры 14 эффективно отслеживают отклик на дне 13 моря путем освещения светом дна 13 и записи отраженного света (то есть камеры 14 снимают дно 13) с частотой выборки 0,000001 - 4 мс, но обычно <1 мс. Фактически, выполняется съемка движения частиц на морском дне 13, когда они движутся в отклике на возвратные Р- и S-волнами.
Возвратная Р-волна также распространяется от морского дна 13 вверх через воду 16, и ее детектируют с помощью гидрофона с частотой выборки 1-4 мс, и эти данные передают в модуль обработки данных. Акселерометр передает данные шумов, соответствующие колебаниям, в модуль обработки данных.
Модуль обработки данных анализирует данные, собранные приемником, гидрофоном и акселерометром, и формирует запись отклика частиц на морском дне, в которой компенсировано движение инструмента. Эту запись можно затем анализировать, используя стандартные принципы интерпретации сейсмической обработки и характеризации структур, стратиграфических свойств и параметров скальных пород и текучих сред.
Таким образом, для каждого сейсмического удара, выполняемого с помощью источника 12, все интерферометры 14 одновременно записывают отклик волнового поля на морском дне 13 в виде выборок через 2-4 мс. Инструменты 14 выполняют этап предварительной обработки, который включает в себя снижение шумов, повышение разрешающей способности и идентификацию объекта изображения. Динамические характеристики модуля камеры рассчитывают и удаляют из выборок. Затем значения Vx, Vy и Vz (три компонента скорости S-волны) и Р (давление Р-волны) получают и сохраняют по четырем сейсмическим трассам. Это повторяют каждые 2-4 мс.
В альтернативном варианте воплощения сейсмический источник не находится в фиксированном местоположении на морском дне, но, фактически, представляет собой движущийся источник Р-волны, который может быть расположен, например, на судне 11. Генерируемая Р-волна распространяется через воду 16 и в подстилающую породу 15, где она распространяется и отражается/преломляется как Р- и S-волны, как и прежде.
На фигуре 2 показана компоновка, в которой сейсмический источник 21 движется и которая включает в себя массив интерферометров 22, который движется, а также сейсмический приемник 23, который движется. Здесь показаны четыре инструмента в каждом массиве, хотя их может быть большее количество. Идеальная компоновка может включать в себя 1-3 источника, расположенные на расстоянии 50-400 м друг от друга. Сейсмический приемник 23 также расположен на расстоянии 25-400 м от источников и записывает сигналы в течение 5-20 секунд (в зависимости от скорости передачи) с периодом выборки 1-4 мс. Интерферометры 22 и сейсмический приемник 23 движутся со скоростью 1-5 м/с. Поверхность дна остается неподвижной, в то время как плавучий, буксируемый источник движется. Сейсмический приемник представляет собой центр, в котором сохраняют все результаты измерений, где выполняют управление, откуда может распределяться энергия и где находятся операторы. Он аналогичен сейсморазведочному судну, которое используется в настоящее время для буксировки сейсмического источника и приемника и которое записывает/сохраняет сейсмическую информацию.
На фигуре 3 показана альтернативная компоновка, в которой источники 31, количество которых оптимально составляет 1-3, перемещаются со скоростью 1-5 м/с, в то время как интерферометры 32 и сейсмические приемники 33 остаются неподвижными. Промежутки аналогичны применяемым в предыдущей компоновке.
На фигуре 4 показана третья компоновка, соответствующая фигуре 1, в которой источники 41 (и снова оптимально их количество составляет 1-3), неподвижны, в то время как интерферометры 42 и сейсмический приемник 43 движутся. Промежутки и скорости соответствуют первой компоновке.
Инструменты обычно установлены на или соединены с тросами, которые буксируют позади судна или используют специальное подводное движущееся устройство. Положение инструментов относительно морского дна определяют с использованием акустических технологий, и тросами управляют с помощью "крыльев" на тросах. Вертикальные силы, действующие на тросы, балансируют весом или балластом. Тросы обеспечивают механическое соединение между массивом инструментов и также обеспечивают подачу энергии и передачу данных. В типичной компоновке используется несколько тросов, каждый из которых буксирует массив инструментов.
Судно или буксируемое устройство включает в себя навигационное оборудование и накопитель данных, хотя инструменты также имеют накопитель данных.
В качестве альтернативы, соединение между инструментами может быть беспроводным, например соединение по радио, используемое вместо или в дополнение к проводному соединению.
Рассмотрим фигуру 5, на которой луч лазера расширен так, чтобы он освещал исследуемый объект (OUI, ИО) вдоль линии, как показано на фигуре 5. ИО может представлять собой морское дно или другой объект, например поверхность вращающейся части машины.
Присутствует относительное движение между положением измерения, которое может быть точкой, но здесь оно представляет линию на поверхности ИО, и интерферометром (оптической головкой). Относительное движение имеет поперечный компонент Vt скорости, как показано на фигуре 1, а также продольный компонент V1 скорости. В реальной ситуации измерений ИО может двигаться, или может двигаться интерферометр, или могут двигаться они оба. Для простоты такое движение описано, как если бы двигался только ИО. Предполагается, что компоненты скорости остаются одинаковыми или приблизительно одинаковыми для всех точек вдоль линии лазера на объекте. Линия лазера обычно имеет ограниченную длину (от миллиметра до метра) или в специальных вариантах применения она может продолжаться непрерывно на большее расстояние.
Прежде всего, изобретение используется для детектирования временных изменений (АС) продольного компонента V1 скорости в зависимости от направления лазерного луча и направлений колебаний (волны) ИО, при этом V1 может представлять собой компонент как находящийся вне пределов плоскости, так и на поверхности ИО. ИО может иметь плоскую или криволинейную поверхность.
Линия элементов детектора расположена, в основном, в том же направлении, что и поперечный компонент V1 скорости, как показано на фигуре 5. Каждый детекторный элемент может также быть заменен массивом детекторов или поперечной линией детекторов, которая обеспечивает возможность усреднения данных нескольких детекторных элементов для каждого положения на линии детекторов на фигуре 5. В качестве альтернативы, можно использовать весь массив детектора, охватывающий все поле исследования. Детекторные элементы или массивы детекторов также освещаются одним или больше опорными лучами, которые, по меньшей мере, частично когерентны с объектным лучом, отражающимся от ИО (опорные лучи не показаны на фигуре 5). Перед линией детекторов расположены линзы формирования изображения, или система линз, или другое оптическое средство формирования изображения, такое как, например, изогнутые зеркала. Оптическое средство формирования изображения формирует изображение линии лазера на ИО на линии детекторов.
Вместо линии лазера на поверхности объекта можно использовать сканирующую лазерную точку, которой сканируют вдоль аналогичной линии на объекте. Также можно осветить все поле на поверхности объекта, предпочтительно, если используется массив детекторов, охватывающий все поле исследования, таким образом, что освещенная часть объекта будет отображаться на массив детекторов.
Луч лазера, который освещает ИО, также может быть сходящимся или расходящимся с фокусировкой на разных расстояниях от источника, включая точки ниже или за пределами ИО. Но предпочтительно, источник лазера для освещения объекта располагается в апертуре линзы по фигуре 5 или вблизи нее. Это означает, что направления освещения и наблюдения параллельны. Лучи лазера могут быть направлены под разными угловыми направлениями к ИО.
Изменение продольного компонента V1 скорости означает, что направление полной скорости Vtot изменяется. В настоящем изобретении детектируют временные изменения в направлении Vtot и, следовательно, временные изменения продольного компонента V1 скорости.
Каждый детекторный элемент в интерферометре, расположенный на определенном расстоянии вдоль линии детекторов или в массиве детекторов, имеет свое собственное конкретное направление чувствительности. Линия SDL (ЛНЧ, линия направления чувствительности) на фигуре 5 представляет линию или направление такого рода. Интерферометр и луч лазера расположены и установлены в угловых направлениях таким образом, что, по меньшей мере, один детектор или группа детекторов имеют линию ЛНЧ направления чувствительности, которая располагается нормально скорости Vtot. Если используется массив детекторов, охватывающий все поле исследования, вместе с освещением объекта с охватом всего поля исследования, существует линия детекторов в массиве, на которой все детекторы имеют направление чувствительности, нормальное к скорости Vtot.
Детекторный элемент с линией ЛНЧ чувствительности, которая нормальна скорости Vtot, не будет обладать чувствительностью к скорости Vtot. Все другие детекторные элементы, с другими направлениями чувствительности, будут захватывать меньшую или большую часть скорости Vtot.
Каждый детекторный элемент в интерферометре детектирует интерференцию между объектным светом и опорным светом, и интенсивность сигнала детекторного элемента определяется уравнением

где I - общая интенсивность света на элементе детектора,
Iref - интенсивность опорного света,
lobj - интенсивность объектного света,
µ - коэффициент от 0 до 1, который зависит от когерентности света и т.д.,
αdiff - начальная разность оптической фазы между объектным светом и опорным светом,
αdisp - дополнительная разность оптической фазы, в результате смещений объекта,
Уравнение (1) также может быть записано как

где Iback - уровень фонового освещения,
Imod - уровень модуляции.
При движении со скоростью Vtot, как показано на фигуре 5, фаза αdisp для данного детекторного элемента будет смещаться со скоростью ω фазы, в зависимости от угла между линией ЛНЧ направления чувствительности для этого детекторного элемента и направлением скорости Vtot. Если этот угол равен или очень близок к 90 градусов для конкретного детекторного элемента, фаза αdisp для этого детекторного элемента не будет изменяться, или будет изменяться очень немного или очень медленно. Для других детекторных элементов, с другими направлениями чувствительности, фаза αdisp будет изменяться, и αdisp будет изменяться тем быстрее, чем в большей степени линия ЛНЧ отклоняется от 90 градусов к направлению скорости Vtot.
Как можно видеть из уравнения (2), интенсивность I освещения детектора будет модулирована синусоидально, когда фаза αdisp изменяется по времени. Это означает, что детекторы с направлениями (ЛНЧ) чувствительности 90 градусов или близко к 90 градусов к направлению скорости Vtot будут иметь интенсивности, которые медленно модулированы, по сравнению с детекторами с другими направлениями чувствительности. Ниже детекторы с направлением ЛНЧ чувствительности 90 градусов к скорости Vtot называются нулевыми детекторами. Обычно положение нулевого детектора (детекторов) постоянно изменяется, в результате чего разные детекторы вдоль линии детекторов или в массиве детекторов с течением времени будут идентифицированы как нулевые детекторы.
Основной принцип настоящего изобретения состоит в детектировании и определении местонахождения нулевых детекторов, то есть определении положений детектора с относительно медленными вариациями интенсивности I. Это, например, может быть выполнено одним из следующих способов:
1. Путем выборки сигналов детекторов или массивов детекторов с высокими частотами выборки и расчета разности сигнала с предыдущими выборками. Если обозначить электрический или цифровой сигнал детектора как S, тогда получим, что

где S - сигнал детектора (электрический или цифровой),
К - константа,
t - время,
I - интенсивность освещения детектора.
Теперь, если рассмотреть временную частоту сигнала S, можно определить, что детектор (детекторы) с наименьшей частотой S представляют собой нулевой детектор (детекторы).
2. Используя детекторы с относительно низкой частотой выборки и относительно длительным периодом экспозиции на выборку. Таким образом, детекторы с более быстрой флуктуацией интенсивности, чем те, которые могут быть разрешены детектором по времени, будут давать относительно малые флуктуации сигнала S (низкая амплитуда), или отсутствие флуктуации, поскольку интенсивность флуктуации будет снижена в результате усреднения. Другими словами, сигнал S не может отслеживать быструю модуляцию интенсивности I. На фиг.6 показан пример того, как сигнал может выглядеть вдоль линии детекторов. Частота сигнала S увеличивается с увеличением расстояния от нулевого детектора одновременно с уменьшением сигнала S по амплитуде, в соответствии с синусоидальной функцией, как показано на фигуре 6. Уравнение (3) не действительно для данного способа, за исключением детекторных элементов, близких к нулевому детектору, поскольку флуктуация интенсивности для этих детекторов будет достаточно малой, чтобы детекторы ее разрешили. Нулевой детектор может быть идентифицирован, и его место расположения может быть определено как с помощью пространственной фильтрации вдоль линии детекторов (см. фиг.6), так и с использованием анализа временных флуктуаций.
3. Используя способ, в котором комбинируются упомянутые выше способы, где анализируют как временную частоту детекторов, так и амплитуды сигналов.
Объектный свет, отраженный от ИО, будет в общем иметь вид спеклов из-за шероховатости поверхности ИО и свойств высокой когерентности луча лазера. Это также можно видеть на кривой на фигуре 6. Когда интерферометр движется относительно ИО или наоборот, спеклы обычно будут декоррелировать в пространстве в результате движения, а как Iobj, так и αdiff в уравнении (3) будут изменяться со временем. Эти случайные изменения задают флуктуации интенсивности, как можно видеть из уравнения, но эти случайные флуктуации интенсивности обычно являются более медленными, чем изменения интенсивности в результате относительного движения Vtot объекта, по меньшей мере, для детекторов, расположенных на удалении от нулевых детекторов. Упомянутые выше случайные флуктуации можно использовать для получения эффектов усреднения, позволяющих получить более гладкую кривую интенсивности, см. фиг.7, где сигнал также фильтруется и выпрямляется. Эффекты усреднения могут быть получены в результате усреднения сигналов из нескольких соседних элементов детектора или массива детекторов, или усреднение может быть получено путем усреднении в области времени. Эффект усреднения или сглаживания может упростить детектирование и определение точного местоположения нулевых детекторов. Если кривую на фигуре 7 подвергнуть выборке в нескольких или в множестве точек вдоль линии детекторов, можно использовать алгоритм для расчета "центра тяжести" (=нулевой детектор). Скорость декорреляции Iobj и αdiff зависит от формы, размера и фокуса лазерного луча (см. предыдущий патент).
На фиг.8 схематично показано, как изобретение работает при детектировании сейсмических сигналов на дне моря. Интерферометр перемещается вдоль пунктирной лини, и общая (относительная) скорость точки измерений, которая движется вдоль дна моря, изменяется между вектором VtotA и вектором VtotB на чертеже, пока имеется установившийся сейсмический сигнал с одиночной частотой, с амплитудой, которая обозначена на чертеже. Нулевой детектор будет переходить между положениями А и В по линии детекторов. Если поперечная скорость t равна 1 м/с, и сейсмическая амплитуда составляет 100 нм с частотой 50 Гц, тогда амплитуда продольной скорости составит 31,4 мкм/с, и направление полной скорости Vtot будет изменяться в пределах +/-0,0018 градусов. При использовании интерферометра, расположенного на высоте 5 метров над дном моря, и при длине линии лазера на ИО 0,3 метра, и длине массива детекторов 50 мм расстояние между положением А и В на линии детекторов составит приблизительно 26 мкм, что обычно составляет расстояние 4 пикселя при размере пикселя 7 мкм.
Пример алгоритма записи для детектирования нулевого детектора может быть представлен следующим образом:
1. Сигнал Si(t) получают от всех детекторных элементов i вдоль линии детекторов с заданной частотой выборки (t = время).
2. Вариацию Si(t) по времени ∂Si(t)/∂t рассчитывают для всех пикселей.
3. Значения ∂Si(t)/∂t суммируют и усредняют в течение определенного времени для всех пикселей, также их можно усреднять по нескольким соседним пикселям. Некоторые из этих соседних пикселей также могут быть расположены в поперечном направлении, как обозначено на фигуре х.
4. Пространственную фильтрацию выполняют вдоль линии детекторов, для поиска положения нулевого детектора (детекторов)
Другие алгоритмы также можно использовать, где оценка времени сигнала S вдоль линии детекторов используется для определения местонахождении нулевого детектора (детекторов).
В изобретении также могут использоваться 1-мерные "детекторы, чувствительные к положению", для разрешения малых вариаций смещения интенсивности (малые перемещения нулевых детекторов). Детектор, чувствительный к положению, может быть основан на технологиях связывания или коррелирования между несколькими соседними детекторными элементами, и таким образом может быть повышена чувствительность.
Для отображения линии лазера на объекте длиной 30 см на линию детектора длиной 50 мм на расстоянии 5 метров можно использовать фокусное расстояние приблизительно 0,7 метра. Оптическое расстояние между линзой и линией детектора будет относительно большим, но зеркала или другие оптические элементы можно использовать для получения ломаного пути света, и при этом можно обеспечить меньшие размеры, см. фиг.9.
Чувствительность системы также может быть повышена или понижена при использовании разных линз или систем линз или других элементов формирования изображения перед детекторами. Изогнутые зеркала также можно использовать. Также комбинировали системы с 2 или больше линиями детекторов, расположенных рядом друг с другом, где одна система может иметь разные системы линз перед детекторами, в то время как другие линии детекторов имеют другие линзы или системы формирования изображения. Таким образом, одна системы детектора может иметь высокую чувствительность, в то время как другая система имеет низкую чувствительность, но больший динамический диапазон относительно сейсмических амплитуд и относительно несовмещения всего интерферометра и направления луча лазера по сравнению с направлением Vtot скорости. В практической конструкции линзы или элементы формирования изображения могут быть длинными в одном направлении и узкими в другом поперечном направлении.
Если зеркала установлены между системой формирования изображения и детекторами или снаружи системы формирования изображения, тогда линии направления чувствительности для детекторных элементов можно регулировать путем наклона одного или больше из этих зеркал, как обозначено на фигуре 9. Если интерферометр перемещается с изменением углового положения во времени, тогда может потребоваться соответственно регулировать направления чувствительности.
Линия детекторов или массивов детекторов, или детекторов, чувствительных к положению, может быть короткой или длинной, она может составлять от нескольких микрометров до нескольких метров, если (предпочтительно) используют несколько лучей лазера и систем формирования изображения.
Если используются две или несколько параллельных линий детекторов с разной чувствительностью, система с менее чувствительной линией детектора (с наибольшим динамическим диапазоном) может использоваться для регулировки направления чувствительности для других линий детектора с более высокой чувствительностью таким образом, что они могут находить свои соответствующие нулевые детекторы и работать в пределах их ограниченного динамического диапазона.
В изобретении также можно использовать динамическое управление направлениями чувствительности, используя динамическое управление упомянутыми выше зеркалами. Управление зеркалами осуществляют сигналами обратной связи из одной или больше параллельных линий детекторов, как описано выше, в результате чего нулевое положение детектора поддерживается более или менее постоянным на линии детекторов, на одной или больше из используемых линий детекторов. Таким образом, сигнал обратной связи управления будет предоставлять информацию о сейсмическом сигнале.
Измерение сейсмических сигналов может иметь длительность в несколько секунд, начиная с относительно больших сейсмических амплитуд и затем с уменьшающимися амплитудами. Динамический диапазон и чувствительность в настоящем изобретении могут быть отрегулированы и могут изменяться в течение периода измерения. Это может осуществляться с использованием двух или больше параллельных линий детекторов или путем изменения или регулировки оптических элементов перед линией детекторов.
Другая конструкция в соответствии с изобретением показана на фигуре 10.
В этом случае луч лазера направлен в направлении исследуемого объекта (ИО) для освещения одной точки на поверхности (точки измерений на фигуре 10). Луч лазера может быть сходящимся или расходящимся, и его фокус может размещаться на разных расстояниях от источника, включая точки ниже или за пределами ИО. Луч также может иметь разную форму (круглую, прямоугольную и т.д.), и луч также может быть сфокусирован в направлении линии, расположенной ниже поверхности вместо точки.
Линию детекторных элементов размещают, в основном, в том же направлении, что и направление поперечного компонента V1 скорости, как показано на фигуре 10. Как и раньше, каждый детекторный элемент может быть заменен массивом детекторов. Детекторные элементы или массивы детекторов также освещаются одним или больше опорными лучами, которые, по меньшей мере, частично являются когерентными с объектным светом, отражаемым от ИО (опорные лучи, не показаны на фигуре 10). Свет, отражаемый от точки измерений ИО, также может быть отражен зеркалами или направлен другими элементами или с помощью другого средства, таким образом, что местоположение линии детекторов или массивов детекторов может быть физически определено и геометрически скомпоновано другими способами, чем показано на фигуре 10.
На фигуре 10 показана нулевая плоскость. Она представляет собой плоскость в пространстве, которая проходит через точку измерений и которая расположена нормально вектору Vtot скорости. Как и ранее, каждый детекторный элемент, расположенный в конкретном месте вдоль линии детекторов, имеет собственное специфическое направление чувствительности. Линия ЛНЧ, показанная на фигуре 10, представляет линию или такое направление.
Интерферометр и луч лазера расположены и скомпонованы с такими угловыми направлениями, что, по меньшей мере, один детектор или массив детекторов на линии детектора имеет линию ЛНЧ направления чувствительности, которая параллельна нулевой плоскости и фактически расположена в этой нулевой плоскости. При использовании компоновки, показанной на фигуре 10, направление чувствительности для детекторного элемента не является линией, которая проходит от точки измерения (пятно лазера на ИО) и в направлении детекторного элемента. Направление чувствительности для детекторного элемента показано на фигуре 11.
Детекторный элемент с линией ЛНЧ чувствительности в нулевой плоскости не будет иметь чувствительности к скорости Vtot но все другие детекторные элементы с другими направлениями чувствительности будут захватывать меньшую или большую часть скорости Vtot.
Уравнение для интенсивности света будет таким же для этой оптической конфигурации, как и для приведенных выше конфигураций, таким образом, уравнения (1) и (2) остаются действительными.
На фиг.12 схематично показано, как изобретение работает для детектирования сейсмических сигналов на дне моря. Общая (относительная) скорость точки измерений, которая перемещается через дно моря, изменяется от вектора VtotA ДО вектора VtotB на чертеже до тех пор, пока имеется установившийся сейсмический режим с одной частотой, с амплитудой, как обозначено на чертеже. Нулевой детектор перемещается между положениями А и В на линии детекторов. Если поперечная скорость Vt равна 1 м/с и сейсмическая амплитуда составляет 100 нанометров с частотой 50 Гц, тогда амплитуда продольной скорости составит 31,4 мкм/с и направление полной скорости Vtot будет изменяться в пределах +/-0,0018 градусов. Если интерферометр расположен на расстоянии 5 метров выше дна моря, расстояние между позициями А и В на линии детекторов составит 314 микрометров, что обычно представляет собой расстояние 40 пикселей при размере пикселя 7 микрометров.
Кроме того, при такой оптической конфигурации можно использовать "детекторы, чувствительные к положению", для разрешения малых вариаций интенсивности движений (малые перемещения нулевых детекторов). Основное различие между этой конфигурацией и первой конфигурацией состоит в том, что здесь не используется оптическое средство для формирования изображения и что линия детекторных элементов обычно будет более длинной.
Однако чувствительность такой второй конфигурации также может быть повышена или снижена путем использования отрицательных или положительных линз, или систем линз, или других элементов формирования изображения перед детекторами, как показано на фигуре 13. Изогнутые зеркала также можно использовать. В этом случае также можно использовать комбинированные системы с 2 или больше линиями детекторов, расположенных рядом друг с другом, где одна система может иметь разные системы линзы (или не иметь линз) перед детекторами, в то время как другие линии детекторов имеют другие линзы или систему формирования изображения.
Как и прежде, линия детекторов, или массивы детекторов, или детекторов, чувствительных к положению, могут быть короткими или длинными; они могут составлять от нескольких микрометров до нескольких метров или даже могут располагаться непрерывно вдоль расстояний в несколько сотен метров, если (предпочтительно) используются несколько лучей лазера. Если длина линии детектора ограничена, положение нулевого детектора может заканчиваться за пределами линии массивов детектора и поэтому ни один из детекторных элементов вдоль линии не становится нулевым детектором. В этом случае направление луча лазера можно регулировать до тех пор, пока положение нулевого детектора не будет введено в диапазон (длину) линии детекторных элементов. Кроме того, если свет, поступающий на линию детекторов, отражается через зеркала прежде, чем он попадает на детекторы, эти зеркала можно наклонять для получения соответствующего направления чувствительности в системе.
Во второй конфигурации возможно динамическое управление лазерным лучом, при этом лучом управляют сигналами обратной связи из одной или больше параллельных линий детекторов, как описано выше, в результате чего положение нулевого детектора удерживают более или менее постоянным на линии детектора, в одной или больше используемых линий детектора. Как и прежде, сигналы обратной связи управления дают информацию о сейсмическом сигнале. Лучом лазера предпочтительно управляют только в одном направлении, в основном в направлении скорости Vtot, которая снова располагается нормально направлению линии детекторов или составляет приблизительно то же направление.
В общем, в отличие от описанной выше со ссылкой на фиг.5 системы система на фигуре 10 будет иметь более высокую чувствительность, но меньший динамический диапазон при увеличении расстояния до ИО. Расстояние до ИО может быть определено в системе с использованием данных S от линии детекторов, поскольку область нулевых детекторов становится шире при увеличении расстояния.
Недостаток второй конфигурации по сравнению с первой состоит в том, что изменение расстояния между интерферометром и ИО могут привести к появлению фальшивых сигналов вдоль линий детекторов. Эти фальшивые сигналы могут быть малыми, но если система будет выполнена с возможностью разрешения очень малых амплитуд, такой источник ошибки может стать ограничивающим фактором.
Модуляция фазы
Если луч лазера и направления чувствительности системы (как в первой, так и во второй конфигурации) захватывает большую часть перемещения интерферометра или ИО, тогда фазовая модуляция опорного луча может использоваться для компенсации этого эффекта, см. фиг.14. Это описано в GB-А-2411001.
Если относительно большая часть перемещения интерферометра захватывается системой, это означает, что скорость Vt становится большой, поэтому V1 может иметь большой постоянный ("DC") компонент при малом "АС" компоненте, наложенном на него. Большой DC компонент V1 может быть удален путем использования фазовой модуляции опорного луча. Фазовая модуляция фактически означает, что кривую на фигуре 7 перемещают в стороны (влево или вправо) от линии детектора. Другой способ выражения этого состоит в том, что угол между нулевой линией или нулевой плоскостью и полной скоростью Vtot становится отличным от 90 градусов, когда используется фазовая модуляция опорного луча.
Если, например, луч лазера направлен под определенным углом вперед или назад относительно направления распространения для интерферометра (см. на фиг.8 и 12), тогда скорость V1 становится меньшей или большей уровня "DC". В этом случае можно использовать фазовую модуляцию для его компенсации.
Используя фазовую модуляцию, вводят "синтетическую" продольную скорость в систему. Если моделируют синусоидально изменяющуюся скорость V1 с заданной амплитудой и частотой и если определяется соответствующая "амплитуда" нулевого детектора вдоль линии детектора с той же частотой, тогда по этим данным можно фактически рассчитать поперечную скорость Vt.
Трехмерное измерение
Изобретение можно использовать для измерения пространственных трехмерных смещений, если используются, например, три отдельных модуля, таких, как показаны на фигуре 5 и/или на фигуре 10. На фиг.15 показан пример этого подхода, в котором сейсмические сигналы на морском дне измеряют в 3 измерениях. Каждый из лучей лазера на чертеже может представлять собой луч лазера или линию лазера, как описано выше. В компоновке, показанной на фигуре 15, фазовая модуляция может потребоваться в модуле, направленном вперед в направлении скорости.
Предполагается, что длина волны колебаний (волн) ИО больше, чем расстояние между положениями на ИО, где отражаются линии чувствительности луча лазера.
Если имеется большое количество систем, таких как показаны на фигуре 15, перемещающихся в большом массиве систем, можно выполнять измерения на больших площадях морского дна. Также можно использовать комбинированные системы, где свет, отраженный от той же линии освещения или точки освещения, может захватываться разными соседними системами детекторов для получения результатов измерений с разными направлениями чувствительности.











Изобретение относится к технологии сейсмической разведки и сейсморазведочному построению представления подземных слоев. Технический результат заключается в упрощении способа сейсмической разведки, в котором детектируют Р- и S-волны. Способ и устройство, предназначенные для выполнения сейсмической разведки, характеризуются тем, что генерируют сейсмическое событие и применяют его к поверхности земли; используют интерферометр для детектирования отклика на событие; на этапе детектирования отслеживают и записывают упомянутый отклик в виде перемещения частиц на поверхности земли; на этапе анализа анализируют перемещение частиц на поверхности земли в течение периода отклика. На интерферометре устанавливают массив детекторов в линию, проходящую в том же направлении, что и поперечный компонент Vt скорости относительного движения частиц поверхности земли, причем детекторы распологают таким образом, что они детектируют световые лучи с разными угловыми направлениями; сформированный опорный луч когерентного света объединяют с объектным лучом, отраженным от поверхности, для получения взаимной интерференции в виде спекл-структуры, представляющей информацию об относительном движении поверхности и интерферометра. Определяют, какой из детекторов в массиве имеет нулевую или минимальную чувствительность к полной скорости Vtot движения, идентифицируя, таким образом, детектор с линией направления чувствительности, которая расположена нормально Vtot; устанавливают таким образом, изменение направления Vtot с течением времени, связанное с изменением поперечным компонентом V1. 4 н. и 47 з.п., 15 ил.
1. Способ сейсмической разведки, содержащий этапы, на которых генерируют сейсмическое событие; применяют сейсмическое событие к поверхности земли; используя интерферометр, детектируют отклик на событие, в котором присутствует относительное движение между поверхностью земли и интерферометром, причем детектируемый отклик включает в себя Р-волны и S-волны на поверхности земли; и анализируют детектируемый отклик; при этом на этапе детектирования выполняют мониторинг и запись отклика на сейсмическое событие в виде перемещения частиц на поверхности земли из положения, расположенного на расстоянии от поверхности земли, причем этап детектирования выполняют в течение периода отклика, период отклика представляет собой заданный период времени после сейсмического события; а на этапе анализа анализируют перемещение частиц на поверхности земли в записанном отклике на сейсмическое событие в течение периода отклика; причем упомянутое относительное движение имеет полную скорость Vtot, которая включает в себя трансверсальный (поперечный) компонент Vt и продольный компонент V1; при использовании интерферометра направляют объектный луч когерентного света на место измерения на поверхности земли, в соответствии с чем происходит относительное движение между поверхностью и местом измерения; устанавливают массив детекторов на интерферометре в линию, проходящую, в общем, в том же направлении, что и поперечный компонент Vt скорости, причем детекторы выполнены с возможностью детектирования световых лучей с разными угловыми направлениями, представляя разные направления чувствительности; формируют опорный луч когерентного света, который, по меньшей мере, частично является когерентным с объектным лучом; комбинируют опорный луч с объектным лучом, отраженным от поверхности, для формирования взаимной интерференции в виде спекл-структуры, предоставляющей информацию об относительном движении поверхности и интерферометра; детектируют спекл-структуру и взаимную интерференцию с помощью детекторов; определяют, какой из детекторов в массиве имеет нулевую или минимальную чувствительность к полной скорости Vtot движения, идентифицируя, таким образом, детектор с линией направления чувствительности, которая расположена нормально Vtot; выполняют мониторинг временного изменения, при котором детекторы имеют нулевую или минимальную чувствительность, устанавливая, таким образом, изменения направления Vtot с течением времени, связанные с изменениями V1; и определяют временные изменения в V1.
2. Способ по п.1, в котором объектный луч и опорный луч излучают из интерферометра.
3. Способ по п.1, в котором интерферометр постоянно движется в том же направлении, что поперечный компонент Vt скорости, а поверхность движется относительно прерывисто в направлении отличном от направления поперечного компонента Vt скорости.
4. Способ по п.1, в котором когерентные световые лучи представляют собой лазерные лучи.
5. Способ по п.1, в котором объектный луч расширяют для освещения исследуемого объекта.
6. Способ по п.1, в котором место измерения представляет собой точку или линию на поверхности исследуемого объекта.
7. Способ по п.1, в котором каждый детектор в массиве состоит из линии детекторов, проходящей, в общем, параллельно или, в общем, под прямым углом к направлению поперечного компонента Vt скорости.
8. Способ по п.1, в котором детекторы выполнены в виде массива детекторов, охватывающего все поле исследования.
9. Способ по п.1, в котором световые лучи воздействуют для формирования изображения оптическим средством формирования изображения, непосредственно перед детектированием детекторами.
10. Способ по п.9, в котором оптическое средство формирования изображения содержит линзовую систему или изогнутые зеркала.
11. Способ по п.1, в котором каждый детекторный элемент содержит линию отдельных детекторов.
12. Способ по п.11, в котором линия отдельных детекторов расположена параллельно или поперечно поперечной линии детектора, а детекторы представляют собой массив детекторов, охватывающий все поле исследования.
13. Способ по п.1, в котором интерферометр включает в себя оптическое средство формирования изображения перед линией детекторов, причем оптическое средство формирования изображения содержит линзу, систему линз или изогнутые зеркала формирования изображения.
14. Способ, по п.1, в котором дополнительно используются несколько интерферометров одновременно в разных местах расположения.
15. Способ по п.1, в котором отклик преобразуют в цифровую форму и записывают в цифровой форме.
16. Способ по п.1, в котором на этапе анализа анализируют смещения частиц на поверхности и/или скоростей, и/или ускорений.
17. Способ по п.1, в котором скорость частиц синфазна в пределах диска 5 м на поверхности.
18. Способ по п.17, в котором группы пространственно распределенных инструментов используют для увеличения отношения сигнал-шум в одном сейсмическом канале записи.
19. Способ по п.1, в котором поверхность земли представляет собой дно моря, сейсмическое событие прикладывается к морю или непосредственно к морскому дну, а интерферометр расположен на расстоянии над морским дном.
20. Способ по п.19, в котором интерферометр расположен на расстоянии 1-15 м над морским дном во время периода отклика.
21. Способ по п.20, в котором интерферометр включает в себя гидрофон для отдельной записи Р-волн.
22. Способ по п.1, в котором инструмент буксируют как сейсморазведочный кабель или последовательность сейсморазведочных кабелей позади надводного или подводного судна, или наземного транспортного средства, или самолета.
23. Способ по п.22, в котором дополнительно имеется множество интерферометров, установленных на множестве тросов.
24. Способ по п.23, в котором инструменты на каждом тросе расположены друг от друга на меньшем расстоянии, чем длина волны переданного сейсмического события.
25. Способ по п.1, в котором инструмент расположен на самодвижущемся подводном судне, наземном транспортном средстве или на самолете.
26. Способ по п.25, в котором транспортное средство, судно или самолет являются непилотируемыми.
27. Способ по п.25, в котором транспортное средство, судно или самолет включают в себя РЧ передатчик/приемник и антенну, акустический модем, акустический датчик в корпусе, донный датчик, датчик глубины и систему акустического отслеживания, и интерферометр.
28. Способ по любому из п.22, в котором на этапе анализа устраняют из детектируемого отклика шум, представляющий помехи, вызванные движением интерферометра.
29. Способ по п.28, в котором движение интерферометра измеряют с помощью трех независимых акселерометров и вычитают из относительного движения, измеряемого инструментом.
30. Способ по п.1, в котором частицы, перемещение которых детектируют, представляют собой частицы песка на дне моря или на суше.
31. Способ по п.1, в котором сейсмическое событие представляет собой сейсмическую волну, имеющую длину волны в диапазоне 5-100 м, и длительность от 2 до 1000 мс.
32. Способ по п.1, в котором период отклика составляет от 5 до 20 с.
33. Способ по п.1, в котором сейсмическое событие генерируют, используя устройство на поверхности морского судна.
34. Способ по п.33, в котором сейсмическое событие генерируют на поверхности или под поверхностью океана.
35. Способ по п.33, в котором сейсмическое событие генерируют на морском дне с помощью сейсмических источников, с применением принципов наземного сейсмического источника.
36. Способ по п.1, в котором интерферометр движется во время периода передачи со скоростью в диапазоне от 1 до 5 м/с.
37. Способ по п.36, в котором скорость находится в диапазоне от 3 до 4 м/с.
38. Способ по п.1, в котором периодичность выборки составляет 1-2 мс.
39. Устройство, предназначенное для проведения сейсмической разведки, содержащее средство генерирования сейсмического события; средство приложения сейсмического события к поверхности земли; интерферометр, предназначенный для детектирования отклика на событие, включающего в себя Р-волны и S-волны на поверхности земли, в котором присутствует относительное движение между поверхностью земли и интерферометром; и средство анализа детектируемого отклика; при этом интерферометр выполнен с возможностью проведения мониторинга и записи отклика на сейсмическое событие, в виде перемещения частиц на поверхности земли из положения, находящегося на расстоянии от поверхности земли, в течение заданного периода отклика после сейсмического события; упомянутое относительное движение имеет полную скорость Vtot, которая включает в себя трансверсальный (поперечный) компонент Vt и продольный компонент V1, причем интерферометр содержит: средство направления объектного луча когерентного света на место измерения на поверхности земли, в соответствии с чем присутствует относительное движение между поверхностью и местом измерения; массив детекторов на интерферометре, расположенных в линию, проходящую, в общем, в том же направлении, что и поперечный компонент Vt скорости, причем детекторы выполнены с возможностью детектирования световых лучей с разными угловыми направлениями, представляя разные направления чувствительности; средство формирования опорного луча когерентного света, который, по меньшей мере, частично является когерентным с объектным лучом; средство комбинирования опорного луча с объектным лучом, отраженным от поверхности, для формирования взаимной интерференции в виде спекл-структуры, предоставляющей информацию об относительном движении поверхности и интерферометра; средство детектирования спекл-структуры и структуры взаимной интерференции с помощью детекторов; средство определения, какой из детекторов в массиве имеет нулевую или минимальную чувствительность к полной скорости Vtot движения, идентифицируя, таким образом, детектор с линией направления чувствительности, которая расположена нормально к Vtot; средство мониторинга временного изменения, в котором детекторы имеют нулевую или минимальную чувствительность, в соответствии с чем устанавливают изменение направления Vtot с течением времени, связанное с изменениями V1; и средство определения временных изменений V1.
40. Устройство по п.39, в котором средство направления объектного луча когерентного света представляет собой лазер.
41. Устройство по п.39, в котором детектор представляет собой линию детекторов, проходящую, в общем, параллельно или, в общем, под прямыми углами к направлению поперечного компонента Vt скорости.
42. Устройство по п.39, в котором интерферометр включает в себя оптическое средство формирования изображения перед линией детекторов.
43. Устройство по п.42, в котором оптическое средство формирования изображения содержит линзу, систему линз или изогнутые зеркала формирования изображения.
44. Устройство по п.39, в котором имеется дополнительно несколько интерферометров, используемых одновременно в разных местах расположения.
45. Устройство по пп.39-44, дополнительно содержащее средство преобразования отклика в цифровую форму и средство его записи в этой цифровой форме.
46. Устройство по п.39, в котором интерферометр дополнительно включает в себя гидрофон для отдельной записи Р-волн.
47. Устройство по п.39, в котором поверхность земли представляет собой морское дно, сейсмическое событие выполнено с возможностью его применения к морю или непосредственно к морскому дну, а устройство мониторинга выполнено с возможностью установки его на некотором расстоянии над морским дном.
48. Устройство по п.39, в котором устройство детектирования выполнено с возможностью буксирования его судном или выполнено самодвижущимся.
49. Устройство по п.39, в котором устройство детектирования содержит множество интерферометров, установленных на множестве тросов, инструменты на каждом тросе расположены друг от друга на расстоянии, которое меньше, чем длина волны передаваемого сейсмического события.
50. Применение способа по любому из пп.1-18 для формирования отчета о сейсмической разведке области.
51. Применение устройства по любому из пп.39-49 для формирования отчета о сейсмической разведке области.
| WO 2004003589 A, 08.01.2004 | |||
| US 6081481 A, 27.06.2000 | |||
| US 5317383 A, 31.05.1994 | |||
| JP 2005275540 A, 06.10.2005. |

