Предлагаемое изобретение относится к области радиотехники и может быть использовано в стационарных и мобильных системах радиосвязи, а также в системах радиоконтроля для осуществления адаптивной пространственной избирательности радиоприемных устройств с целью повышения помехоустойчивости приема сообщений.
Известен автоматический коммутатор антенн (см. патент РФ на изобретение №2038691, М. кл. H02K 17/00, опубл. 27.06.1995 г.), позволяющий осуществлять выбор антенны с учетом диаграммы направленности (ДН) и требований электромагнитной совместимости (ЭМС). Данное устройство содержит m антенн, установленных на подвижных объектах и связанных через переключатель с n приемопередатчиков, а также со схемой управления и с постоянным запоминающим устройством (ПЗУ) приоритетности частот, с ПЗУ пораженных частот, с ПЗУ приоритетности антенн по адресам, со схемами запоминания и сравнения, ключами и счетчиками.
Однако в устройстве не обеспечивается множественность доступа к антенне, одна антенна может быть использована только одним радиоприемным устройством (РПУ), выбор антенны осуществляется по заранее составленному приоритетному списку антенн, что не позволяет осуществить выбор оптимальной диаграммы направленности (ДН) в пространстве и обеспечить точной направленности на источник радиоизлучения (ИРИ) каждому РПУ для каждого радиосигнала.
В устройстве невозможно обеспечить высокую помехозащищенность от влияния сигналов управления на информационные сигналы антенн, что обусловлено передачей данных по цепям управления, находящихся непосредственно в радиочастотных устройствах коммутации.
В данном устройстве отсутствует возможность контроля уровней и классов излучений принимаемых радиосигналов, а управление ДН осуществляется по априорной информации о возможном направлении прихода сигнала путем подключения любой свободной на этот момент антенны, что не позволяет осуществить адаптивную пространственную избирательность с требуемой точностью каждого РПУ для каждого из принимаемых радиосигналов.
Известна адаптивная антенная решетка (ААР) (см. патент РФ на изобретение №2366047, М. кл. H01Q 21/00, опубл. 27.08.2009 г.), позволяющая определить пространственные параметры ИРИ и использующая полученные данные при формировании ДН.
Данное устройство содержит блок антенных элементов, блок комплексных весовых умножителей, общий сумматор, блок формирования вектора весовых коэффициентов с управляющим входом, при этом выходы N антенных элементов блока антенных элементов через N комплексных весовых умножителей блока комплексных весовых умножителей соединены с N входами общего сумматора, выход которого является выходом устройства, входы блока формирования вектора весовых коэффициентов соединены с управляющими входами соответствующих комплексных весовых умножителей блока комплексных весовых умножителей. Блок формирования вектора весовых коэффициентов содержит N канальный аналого-цифровой преобразователь (АЦП), конвертор, блок комплексного умножения, блок вычисления собственного вектора, блок формирования тестового сигнала, блок вычисления направлений на ИРИ, блок анализа данных. Блок антенных элементов состоит из N идентичных антенных элементов и представляет собой многоэлементную антенную решетку (MAP).
Работа ААР осуществляется следующим образом. Радиосигналы принимаются антенными элементами, взвешиваются комплексными весовыми умножителями и суммируются в общем сумматоре, выход которого и является выходом устройства. При помощи блока формирования вектора весовых коэффициентов осуществляется настройка комплексных весовых умножителей с целью повышения отношения сигнал/помеха плюс шум) на выходе устройства. На основе управляющей информации о возможном направлении прихода сигнала, поступающей от внешнего устройства, в блоке формирования вектора весовых коэффициентов производится цифровая обработка сигналов с выходов антенных элементов, определяются пространственные параметры ИРИ и на основе данных о направлении прихода полезного сигнала рассчитываются весовые коэффициенты (N-мерный вектор). Согласно полученному N-мерному вектору в блоке комплексных весовых умножителей производится взвешивание элементов сигнала, и таким образом формируется ДН ААР.
Данное устройство, представляющее собой одну MAP с управлением ДН оцифрованными сигналами, позволяет обеспечить более высокую точность направленности на ИРИ и осуществить адаптивную пространственную избирательность по начальным априорным данным только одного РПУ.
Однако устройство не обеспечивает множественность доступа к антенне и может быть использовано только одним РПУ, кроме того, чувствительность управления ДН устройства определяется относительно низкой чувствительностью АЦП.
В устройстве невозможно обеспечить высокую помехозащищенность от влияния сигналов управления на информационные сигналы антенн, что обусловлено передачей данных по цепям управления, находящихся непосредственно в радиочастотных устройствах коммутации.
В данном устройстве отсутствует возможность контроля уровней и классов излучений принимаемых радиосигналов, а управление ДН антенны осуществляется только по априорной информации о возможном направлении прихода одного сигнала с дальнейшей подстройкой направления ДН, что не позволяет осуществить адаптивную пространственную избирательность одновременно каждого из многих РПУ для каждого из многих принимаемых радиосигналов.
Известна автоматизированная система коммутации антенн (АСКА) (см. патент РФ на полезную модель №85775, М. кл. H04B 13/00, H03K 17/00, H04B 7/00 опубл. 10.08.2009 г.), предназначенная для автоматизированной коммутации антенн, в частности приемных антенн.
Структура АСКА представляет собой блок подключения и контроля (БПК) антенн и антенно-фидерных трактов (АФТ), антенные выходы БПК антенн и АФТ соединены посредством радиочастотных (РЧ) кабелей с соответствующими входами блока усиления, разветвления и коммутации (БУРК), БУРК посредством входной/выходной ВОЛС соединен с решающим устройством (РУ) и с БПК, который другой своей входной/выходной ВОЛС связан с РУ, которое другими соответствующими входными/выходными ВОЛС связано с соответствующими оптическими входами/выходами системы дистанционного управления (СДУ), которыми являются соответствующие входы/выходы ВОЛС соответствующих пультов дистанционного управления (ПДУ). В СДУ входят также радиоприемные устройства радиосвязи (РПУр), антенные входы которых соединены посредством РЧ кабелей с соответствующими выходами БУРК. В АСКА имеется также автоматизированное рабочее место (АРМ), входной/выходной ВОЛС связанное с соответствующими выходами/входами РУ. В систему входит устройство электропитания (УЭ), которое обеспечивает бесперебойное снабжение электроэнергией все технические средства системы от сети переменного тока.
В АСКА, предназначенной для распределения энергии, поступающей от антенн, между РПУр, радиосигналы от n антенн, где n - число формируемых ДН, по внешним АФТ поступают на входы БПК антенн и АФТ, в котором осуществляется подключение внешних АФТ, а также при помощи подключаемых измерительных устройств осуществляется контроль параметров антенн и внешних АФТ и подключаются контрольные сигналы для контроля внутренних АФТ системы. При этом в БПК осуществляется управление работой по командам с РУ, обрабатываются контрольные сигналы, поступающие от антенн и АФТ. В результате на БПК антенн и АФТ имеем радиосигналы, содержащие дополнительные контрольные сигналы, которые поступают по радиочастотным кабелям на входы БУРК, где данные радиосигналы усиливаются для уменьшения потерь энергии радиосигнала, далее разветвляются и коммутируются под управлением РУ, на который поступают дополнительные контрольные сигналы и ответные сигналы об исполнении коммутации, позволяющие измерить параметры внутренних АФТ и контролировать общую конфигурацию подключений. Далее с выхода БУРК скоммутированные радиосигналы по РЧ кабелям поступают на антенные входы m РПУр, входящих в СДУ, при этом m выбирают из условия:

где Δf - ширина полосы радиочастот выбранного диапазона,
ΔF - ширина полосы пропускания РПУр.
От k ПДУ, где k выбирается из условия: m/4≤k≤m, входящих в СДУ, осуществляется управление коммутацией антенн и контроль исполнения посредством ВОЛС. Общий контроль параметров антенн, внешних и внутренних АФТ и дистанционное управление системой коммутации может осуществляться также с использованием АРМ. Приоритетными в управлении являются ПДУ. При подаче соответствующих команд от ПДУ или АРМ сигналы управления подаются на РУ, где производится формирование многих сигналов управления, приходящих от ПДУ или АРМ, в последовательный потоков сигналов управления, который поступает на БПК и БУРК, при этом поток сигналов управления посредством ВОЛС распределяется в системе «кольцо» и следует по кольцу (кольцо представляет собой: РУ, БУРК, БПК и РУ) и может двигаться как по движению часовой стрелки, так и против движения часовой стрелки от РУ. В БУРК в соответствии с сигналами управления от РУ происходит выполнение соответствующих коммутаций. После выполнения коммутаций в БУРК ответные сигналы об исполнении команд формируются в поток, который поступает в РУ, при этом движение потока ответных сигналов об исполнении команд также распределяется в системе «кольцо» и осуществляется по вышеобозначенному кольцу в соответствии с движением потока сигналов управления, с выхода РУ сигналы об исполнении команд поступают в ПДУ и в АРМ, в которых осуществляется визуальная сигнализация о выполнении команд. После выполнения коммутаций в БУРК радиосигналы от антенн поступают посредством РЧ кабелей на антенные входы РПУр. При этом возможна коммутация любой из антенн на любой из РПУр, а также возможна коммутация любой одной антенны на антенные входы всех m РПУр. Допускается коммутация на вход любого одного РПУр только одной антенны, это необходимое ограничение определено РУ и ПДУ.
Общий контроль в процессе работы с использованием АРМ осуществляется постоянно в процессе работы системы и независимо от управления от ПДУ. В этом случае от АРМ подается команда сигналов управления на РУ, где производится формирование потоков сигналов управления. Сформированный поток сигналов управления в РУ поступает в БПК и БУРК, при этом поток сигналов управления распределяется в системе «кольцо» и следует по кольцу, которое представляет собой: РУ, БУРК, БПК и РУ. Поток управляющих и контрольных сигналов может двигаться как по движению часовой стрелки, так и против движения часовой стрелки от РУ. В БПК и БУРК в соответствии с сигналами управления происходит выполнение соответствующих коммутаций в БПК антенн и АФТ и в БУРК соответственно. После выполнения коммутаций в БПК антенн и АФТ и в БУРК сигналы об исполнении команд и контрольные сигналы, которые в БПК и в БУРК формируются в потоки и поступают в РУ, с выхода которого сигналы об исполнении команд на коммутацию антенн поступают в ПДУ и в АРМ, в которых осуществляется визуальная сигнализация о выполнении команд, контрольные сигналы поступают в АРМ, где осуществляется их обработка. Результаты обработки контрольных сигналов индицируются на экране монитора АРМ. В результате обработки контрольных сигналов выявляются значения таких параметров как: проводимость антенн и внешних АФТ; сопротивление изоляции антенн и внешних АФТ; коэффициент стоячей волны по напряжению (КСВН) антенн, внешних и внутренних АФТ; затухание РЧ кабелей с элементами усиления, разветвления и коммутации внутренних АФТ, а также общая конфигурация коммутаций системы. При подаче команды на коммутацию антенн ПДУ имеют приоритет перед АРМ. Приоритетность определена РУ.
Система позволяет осуществлять большое количество коммутаций с малым временем переключения, обеспечивает множественность доступа к каждому АФТ, обеспечивает контроль состояния антенн, внешних и внутренних АФТ, обеспечивает контроль конфигурации соединений АФТ с РПУр внутри системы, а также благодаря применению ВОЛС обеспечивает высокую помехозащищенность от влияния управляющих сигналов на информационные радиосигналы от антенн.
Однако в данной системе отсутствуют направленные антенны, отсутствует возможность: обзора радиочастотного диапазона; измерения уровней принимаемых радиосигналов; определения классов излучения сигналов ИРИ (распознавания сигналов) и, следовательно, отсутствует возможность осуществления адаптивной пространственной избирательности каждого РПУр для каждого из принимаемых радиосигналов путем автоматического выбора антенны с ДН направленной на ИРИ и подключения ее к антенному входу РПУр.
Данная система выбрана в качестве прототипа.
Техническим результатом изобретения является обеспечение адаптивной пространственной избирательности каждого РПУр для каждого из принимаемых радиосигналов.
Достижение технического результата обеспечивается в системе адаптивной пространственной избирательности радиоприемных устройств (САПИ РПУ), содержащей блок подключения и контроля антенн и антенно-фидерных трактов (БПКА и АФТ), который посредством входных/выходных ВОЛС связан с выходами/входами решающего устройства (РУ) и блока усиления, разветвления и коммутации (БУРК) соответственно, а радиочастотными (РЧ) выходами соединен посредством n РЧ кабелей с соответствующими n входами БУРК, связанного посредством входной/выходной ВОЛС с выходом/входом РУ, другие входные/выходные ВОЛС которого связаны с соответствующими выходами/входами автоматизированного рабочего места (АРМ) и системы дистанционного управления (СДУ), выходами/входами которого являются выходы/входы k пультов дистанционного управления коммутацией антенн (ПДУ), в СДУ также входит блок радиоприемных устройств радиосвязи (БРПУр), который содержит m радиоприемных устройств радиосвязи (РПУр), входы которых, являющиеся РЧ входами БРПУр и СДУ, соединены посредством m РЧ кабелей с соответствующими m выходами БУРК, в систему входит устройство электропитания (УЭ), которое обеспечивает бесперебойное электроснабжение системы от сети переменного тока, отличающейся тем, что введено антенное устройство (АУ), содержащее n направленных антенн, которые посредством n АФТ и РЧ кабелей соединены с n входами БПКА и АФТ, при этом n выбирают из условия:
где Δφ - ширина ДН антенн в азимутальной плоскости в радианах, Δθ - ширина ДН антенн в угломестной плоскости в радианах (рад),
число m РПУр выбирают из условия:
где Δf - ширина полосы радиочастот рабочего диапазона,
ΔF - ширина полосы пропускания РПУр, при этом k определяют из условия: m/2≤k≤m,
кроме того, введено устройство выбора диаграммы направленности (УВДН), состоящее из блока радиоприемных устройств контроля (БРПУк), блока распознавания и сравнения сигналов (БРС), запоминающего устройства (ЗУ), буферного устройства (БУ), а также вышеупомянутого АРМ, при этом в БРПУк входит r радиоприемных устройств контроля (РПУк), входы которых, являющиеся РЧ входами БРПУк и УВДН, соединены посредством r РЧ кабелей с соответствующими r выходами БУРК, причем r выбирают из условия:

где Δfк - ширина контролируемого диапазона радиочастот,
ΔFк - ширина полосы пропускания мгновенного обзора РПУк,
при этом общее число РЧ выходов БУРК равно s=m+r, r выходов БРПУк, которыми являются выходы r РПУк, соединены с соответствующими r входами БРС, а r входов/выходов управления и контроля БРПУк подключены к соответствующим r выходам/входам АРМ, которое соответствующей входной/выходной ВОЛС, являющейся входной/выходной ВОЛС УВДН, подключен к соответствующему входу, введенного в СДУ блока управления и контроля радиоприемниками (БУКР), другой соответствующий вход/выход которого, являясь соответствующим входом/выходом СДУ, при помощи приемопередающей линии связан с конечным пунктом приема (КПП), выход БУКР при помощи ВОЛС подключен к соответствующему входу УВДН которым является вход БУ, который одной входной/выходной шиной соединен с ЗУ, а другой входной/выходной шиной соединен с АРМ, m соответствующих выходов БУ соединены с соответствующими m входами БРС, который одной входной/выходной шиной соединен с ЗУ, а другой входной/выходной шиной соединен с АРМ, в блоке БУКР m сигнальных входов и m входов/выходов контроля и управления соединены с соответствующими m сигнальными выходами и m выходами/входами контроля и управления блока БРПУр, которыми соответственно являются сигнальные выходы и выходы/входы контроля и управления m РПУр.
Введение в систему АУ, содержащего n высокоэффективных направленных антенн, расположенных таким образом, чтобы всеми ДН антенн охватить окружающее объемное пространство, в азимутальной и угломестной плоскостях одновременно, позволяет принимать радиосигналы от ИРИ, находящихся в любой точке окружающего пространства. Количество (число) ДН, равное β, создаваемое n антеннами, дает возможность выбрать антенну с ДН, оптимальной для каждого принимаемого радиосигнала. Введенный в СДУ блок БУКР позволяет управлять РПУр, обрабатывать выходные сигналы РПУр и таким образом создавать каналы радиоприема, которые по приемопередающей линии поступают в КПП и по ВОЛС поступают в УВДН. Введение в САПИ РПУ устройства УВДН, состоящего из БРПУк, БРС, БУ, ЗУ и АРМ, при этом в БРПУк входит r РПУк, позволяет при помощи r РПУк, БРС, БУ, ЗУ под управлением АРМ в автоматическом (без участия оператора) или автоматизированном режиме (с участием оператора), контролировать радиосигналы, приходящие от ИРИ, которые расположены в различных точках окружающего пространства и излучают радиосигналы различных классов в широком диапазоне радиочастот, то есть осуществлять прием радиосигналов на антенны и при помощи РПУк осуществлять частотную избирательность и необходимую обработку сигналов, затем в БРС производить измерение уровней сигналов, распознавание сигналов и определять их классы излучений. Причем распознавание и классификацию сигналов в БРС производят путем специальной обработки сигналов в реальном и отложенном времени, путем выявления признаков сигналов, поступающих от РПУк и сравнения их с признаками сигналов, поступающих от РПУр, а также с признаками известных сигналов, поступающих от ЗУ. Нахождение ИРИ, расположенных в различных точках пространства, осуществляют путем поочередного подключения антенн в БУРК под управлением АРМ и РУ к антенному входу РПУк и таким образом осуществляют автоматическое сканирование по пространству. При подключении каждой антенны измеряют уровни сигналов в БРС, принимаемых РПУк и РПУр от одного и того же ИРИ, сравнивают уровни сигналов между собой и по наибольшему уровню выбирают антенну. При этом выходные сигналы РПУр поступают в БУКР где мультиплексируются, преобразуются в оптические сигналы, с выхода БУКР оптические сигналы по ВОЛС передаются в БУ, где преобразуются в электрические сигналы, демультиплексируются и передаются в БРС, ЗУ и АРМ. Причем в БРС может производиться обработка сигналов, поступающих одновременно от РПУк и от ЗУ, такая обработка необходима при выборе антенны с оптимальной ДН для радиосигнала с заданным значением частоты и классом излучения с целью определения класса излучения по эталонному сигналу. Кроме того, при заданном классе излучения и неопределенном значении частоты радиосигнала в УВДН определяются значения частот радиосигналов данного класса излучения и антенн с ДН, оптимальными для данных радиосигналов. Определенные при помощи УВДН частоты радиосигналов заданного класса излучения либо автоматически при помощи АРМ и БУКР настраивают РПУр, либо рекомендуются для настройки РПУр в виде визуальной сигнализации в БУКР. А определенные таким образом, при помощи УВДН, антенны с оптимальными ДН для принимаемого сигнала на определенной частоте при помощи АРМ, РУ и БУРК либо автоматически подключаются к антенному входу РПУр, принимающего данный сигнал, либо рекомендуются для подключения при помощи ПДУ к антенному входу РПУр в виде визуальной сигнализации в ПДУ. Возможность управления БУКР при помощи АРМ и РУ позволяет системе САПИ РПУ работать в автоматическом или автоматизированном режиме по назначенному заданию при создании каналов радиоприема, которые из БУКР по приемопередающей линии поступают в КПП.
Таким образом, введенные в предлагаемую систему блоки и устройства позволяют путем автоматизированного и автоматического выбора и подключения к каждому РПУр антенны с ДН оптимальной для принимаемого радиосигнала осуществить адаптивную пространственную избирательность каждого из m РПУр для каждого из принимаемых радиосигналов и получить технический результат. Осуществление адаптивной пространственной избирательности способствует повышению помехоустойчивости приема сообщений в стационарных и мобильных системах радиосвязи.
Структурная схема системы адаптивной пространственной избирательности РПУ приведена на Фиг.1, в соответствии с которой САПИ РПУ содержит: АУ 1, содержащее n направленных антенн, соединенных посредством n внешних АФТ с n РЧ входами БПКА и АФТ 2, который посредством соответствующих входных/выходных ВОЛС связан с соответствующими выходами/входами БУРК 3 и РУ 4, а n РЧ выходов БПКА и АФТ 2 посредством n внутренних АФТ и РЧ кабелей подключены к n РЧ входам БУРК 3, имеющего s РЧ выходов, при этом s=m+r, БУРК 3 посредством другой входной/выходной ВОЛС связан с соответствующим выходом/входом РУ 4, другие соответствующие входные/выходные ВОЛС которого подключены к соответствующим выходам/входам СДУ 5, которыми являются выходы/входы ПДУ 61…ПДУ 6k, СДУ 5 также содержит БУКР 7 и БРПУр 8, причем БРПУр 8 содержит РПУр 81…РПУ 8m, а БУКР 7 первым входом/выходом, являющимся соответствующим входом/выходом СДУ 5, при помощи ВОЛС подключен к выходу/входу УВДН 9, которым является соответствующий выход/вход АРМ 10, который другой входной/выходной ВОЛС соединен с соответствующим выходом/входом РУ 4, а r входов/выходов АРМ 10 соединены с соответствующими r выходами/входами БРПУ к 11, которыми являются выходы/входы РПУ к 111…11r, r антенных входов которых, являясь входами УВДН 9 и БРПУк 11, при помощи r РЧ кабелей подключены к r выходам БУРК 3, а сигнальные выходы РПУ к 111…РПУк 11r, являясь выходами БРПУк 11, подключены к соответствующим r входам БРС 12, который соответствующими входными/выходными шинами подключен соответственно к выходным/входным шинам АРМ 10 и к ЗУ 13, к другим соответствующим входам/выходам АРМ 10 и ЗУ 13 подключено БУ 14 своими соответствующими выходными/входными шинами, БУ 14 своими m выходами подключено к соответствующим m входам БРС 12, а своим входом посредством ВОЛС соединено с выходом БУКР 7, второй вход/выход которого, являющийся соответствующим входом/выходом СДУ 5, при помощи приемопередающей линии соединен с КПП, а m входов и m входов/выходов которого соединены с соответствующими m выходами и m выходами/входами БРПУр 8, которыми являются соответствующие m выходов и m выходов/входов РПУр 81…РПУ 8m, m антенных входов которых, являясь антенными входами БРПУр 8 и СДУ 5, при помощи m РЧ кабелей соединены с m РЧ выходами БУРК 4. В САПИ РПУ входит УЭ 15, которое обеспечивает бесперебойное электроснабжение все технические средства системы от сети переменного тока.
Работа предлагаемой системы адаптивной пространственной избирательности, предназначенной для выбора антенны с ДН оптимальной для приема данного радиосигнала и подключения выбранной антенны к антенному входу РПУр, осуществляется следующим образом.
Радиосигналы от n антенн АУ 1, имеющего β ДН в азимутальной и угломестной плоскостях, поступают в БПКА и АФТ 2.
АУ 1 обеспечивает общую, суммарную ДН с вертикальной и горизонтальной поляризацией в азимутальной плоскости от 0 до 2π (рад) и в угломестной плоскости от 0 до π/2 (рад), при этом каждая антенна в АУ 1 обеспечивает требуемую ширину ДН каждого направления как в азимутальной (Δφ), так и в угломестной (Δθ) плоскостях. При этом ДН антенн как в азимутальной, так и в угломестной плоскостях пространства должны перекрываться между собой на уровне половины максимальной мощности принимаемого сигнала, то есть на половине ширины ДН по уровню 0,707 от максимального уровня ЭДС принимаемого сигнала.
Таким образом, число ДН α в азимутальной плоскости пространства при ширине ДН, равной Δφ (рад), определяется по формуле:
где Δφ - ширина ДН антенн в азимутальной плоскости,
2π - максимальный угол в азимутальной плоскости.
Число ДН γ в угломестной плоскости пространства при ширине ДН, равной Δθ (рад), определяется по формуле:
где Δθ - ширина ДН антенн в угломестной плоскости,
π/2 - максимальный угол в угломестной плоскости.
Очевидно, что общее число ДН β, необходимое для полного перекрытия объемного пространства в вертикальной и горизонтальной поляризациях, определяется по формуле:
При применении высокоэффективных антенн с двунаправленными свойствами в азимутальной плоскости число антенн n может быть меньше рассчитанного числа ДН и приближаться к числу, равному β/2. В то же время при осуществлении разнесенного приема число антенн n должно быть, как минимум, в два раза больше числа ДН. Следовательно, целесообразно число n определять согласно формуле: β/2≤n≤β. Очевидно, что АУ 1 должно содержать число антенн n, которое определяют в зависимости от экономических и производственно-технических возможностей по формуле:
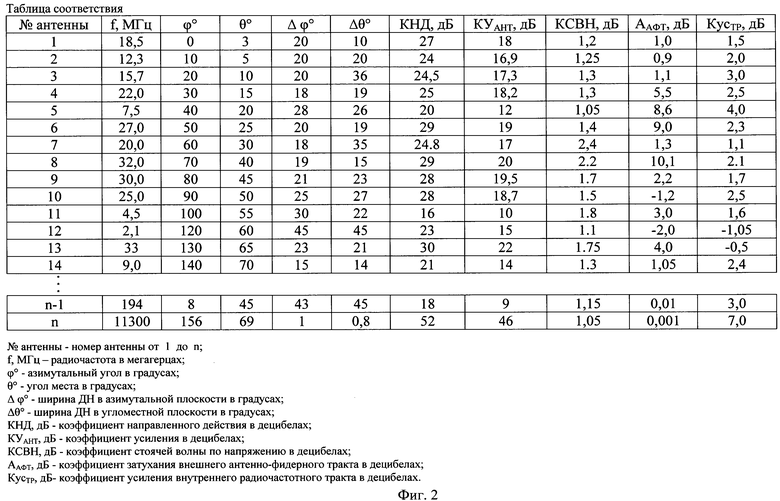
Каждой антенне из состава АУ 1 присваивают номер от 1 до n. Так как каждая антенна имеет такие характеристики, как: ширина ДН в азимутальной плоскости - Δφ; ширина ДН в угломестной плоскости - Δθ; направление ДН в азимутальной плоскости - φ; направление ДН в угломестной плоскости - θ, коэффициент направленного действия (КНД), коэффициент усиления (КУ) и другие параметры, то в память АРМ 10 и ЗУ 13 вносят записи в виде таблиц, в таблице каждому номеру (от 1 до n) соответствуют характеристики данной антенны. Таблицы соответствия необходимы для того, чтобы по заданным направлениям в пространстве быстро определять номера и соответствующие этим номерам антенны, которые подключают к РПУр 81…РПУр 8m в БРПУр 8 и к РПУк 111…РПУк 11r в БРПУк 11. Кроме того, таблицы позволяют точно определять направления на ИРИ и параметры избирательности в пространстве. При необходимости значения параметров каждой используемой в данное время антенны используют для определения напряженности поля в месте приема, поляризации, дальности расположения ИРИ и т.п. Пример таблицы соответствия приведен на Фиг.2.
С выхода БПКА и АФТ 2 радиосигналы по n РЧ кабелям поступают на вход БУРК 3, в котором радиосигналы усиливаются, разветвляются и по соответствующим командам управления от ПДУ 61…ПДУ 6k и АРМ 10 при помощи РУ 4 коммутируются к s-выходам. Контроль параметров антенн, внешних АФТ в АУ 1 и РЧ кабелей, таких как: проводимость антенн и внешних АФТ; сопротивление изоляции антенн и внешних АФТ; коэффициент стоячей волны по напряжению (КСВН) антенн, внешних АФТ; затухание РЧ кабелей с элементами усиления, разветвления и коммутации, а также контроль прохождения радиосигналов от антенн к РПУ (усиление, разветвление и коммутация), контроль конфигураций подключений, осуществляется при помощи БПКА и АФТ 2, РУ 4 и АРМ 10 аналогично прототипу, работа которого подробно описана выше.
Таким образом, на антенный вход каждого из m РПУр 8 по командам управления от ПДУ 61…ПДУ 6k и АРМ 10 при помощи РУ 4 и БУРК 3, а на вход каждого из r РПУк по командам управления от АРМ 10 при помощи РУ 4 и БУРК 3 может быть подключена только одна любая из n антенн АУ 1, так же как на одну любую из n антенн АУ 1 могут быть подключены все s РПУ 8, включающие m РПУр и r РПУк, при этом s=m+r, причем по командам управления от ПДУ 61…ПДУ 6k при помощи РУ 4 и БУРК 3 можно подключать антенны только на антенные входы РПУр 81…РПУр 8m блока БРПУр 8, а по командам управления от АРМ 10 при помощи РУ 4 и БУРК 3 можно подключать антенны на антенные входы всех s РПУ 8, входящих в БРПУр 8 и в БРПУк 11. В отличие от прототипа АРМ 10 имеет приоритет в управлении коммутацией перед ПДУ 61…ПДУ 6k, который определяется и программируется при разработке РУ 4 и может меняться в процессе эксплуатации САПИ РПУ. Кроме того, потоки сигналов управления и контроля от РУ 4 могут распределяться как в системе «кольцо» (как в прототипе), так и в системе «звезда». В системе «звезда» потоки сигналов управления от РУ 4 непосредственно и одновременно приходят в БПКА и АФТ 2 и БУРК 3, а потоки сигналов контроля от БПКА и АФТ 2 и БУРК 3 непосредственно и одновременно приходят в РУ 4. Распределение сигналов в системе «звезда» позволяет уменьшить время коммутации антенн, что очень важно, однако при использовании системы «звезда» из-за отсутствия резервирования пути прохождения потока сигналов снижается надежность всей системы коммутации антенн. Решение о применении систем «звезда» или «кольцо» принимается на этапе программирования при разработке РУ 4 и может меняться в процессе эксплуатации путем перепрограммирования.
Число m РПУр в БРПУр 8, обеспечивающих радиосвязи и радиоконтроль в рабочем диапазоне радиочастот, определяется шириной рабочего диапазона частот и полосой пропускания РПУр, следовательно:

где Δf - ширина рабочего диапазона радиочастот,
ΔF - ширина полосы пропускания РПУр.
Для осуществления радиосвязей и радиоконтроля во всех направлениях пространства, число m РПУр возрастает в n раз до значения:

где n - число антенн в АУ 1.
Исходя из реальных условий число m выбирают по формуле:
при этом число k ПДУ 6 определяют из условия: m/2≤k≤m, которое обеспечивает возможность оператору быстро подключить антенну с нужной ДН к антенному входу каждого из m РПУр. Число r РПУк в БРПУк 11, должно быть таким, чтобы при помощи БРПУк 11 методом сканирования по частоте или методом одновременного широкополосного частотного обзора можно было бы оперативно обеспечить контроль радиосигналов на частотах, на которых уже осуществляется или предполагается прием желательных радиосигналов при помощи РПУр 81…РПУр 8m в БРПУр 8. При этом контроль радиосигналов осуществляется при сканировании окружающего пространства в азимутальной и угломестной плоскостях путем коммутации соответствующих антенн к антенному входу каждого из РПУк 111…РПУк 11r в БРПУк 11. Число r определяется по формуле:

где Δfк - ширина контролируемого рабочего диапазона частот,
ΔFк - ширина полосы пропускания мгновенного обзора каждого РПУк 111…РПУк 11r.
Управление и контроль каждого РПУр 81…РПУр 8m, в БРПУ 8 в автоматизированном режиме работы САПИ РПУ с участием оператора осуществляется в СДУ 5 при помощи БУКР 7, а подключение антенн к каждому РПУр 81…РПУр 8m в БРПУр 8 осуществляется при помощи ПДУ 61…ПДУ 6k РУ 4 и БУРК 3, причем контроль подключения антенн осуществляется в ПДУ 61…ПДУ 6k и в АРМ 10. При помощи БУКР 7 в каждом РПУр 81…РПУр 8m в БРПУр 8 устанавливаются значения частот настройки, классы излучения принимаемых сигналов и их параметры (виды модуляций, скорости передач, девиации частот и т.д.). Выходные сигналы БРПУр 8 поступают в БУКР 7, где производится измерение и контроль сигналов, а также формирование потоков данных для передачи от СДУ 5 по назначению в КПП системы радиосвязи, например в радиобюро. Управление и контроль каждым РПУр 81…РПУр 8m, в БРПУ 8 при автоматическом режиме работы САПИ РПУ без участия оператора осуществляется при помощи АРМ 10 и БУКР 7, а подключение антенн к каждому РПУр 81…РПУр 8m в БРПУр 8 производится при помощи АРМ 10, РУ 4 и БУРК 3, при этом все подключения антенн контролируются в АРМ 10. При помощи АРМ 10 и БУКР 7 в каждом РПУр 81…РПУр 8m устанавливаются значения частот настройки, классы излучения принимаемых сигналов и их параметры (виды модуляций, скорости передач, девиации частот и т.д.). Выходные сигналы каждого РПУр от БРПУр 8 поступают в БУКР 7 где под управлением и контролем АРМ 10 по ВОЛС производится измерение и контроль сигналов от каждого РПУр и уплотнение сигналов в потоки для передачи в КПП системы радиосвязи. Кроме того, в автоматизированном и в автоматическом режимах работы САПИ РПУ выходные сигналы БРПУр 8, которые поступают в БУКР 7, подвергаются мультиплексированию, преобразованию электрических потоков сигналов в оптические потоки сигналов и далее от БУКР 7 по ВОЛС передаются в БУ 14 устройства УВДН 9. В БУ 14 производится преобразование оптических потоков сигналов в электрические, демультиплексирование и могут производиться временные задержки и другие обработки сигналов, далее сигналы поступают в АРМ 10, БРС 12 и ЗУ 13. В БРС 12 измеряются уровни сигналов и выявляются признаки, характеризующие классы излучения сигналов. В ЗУ 13 производится запись сигналов и выявленные признаки классов излучения. В АРМ 10 производится визуализация принимаемых сигналов БРПУр 8 и других данных, а также аудиовоспроизведение, при необходимости. В БРС 12 на соответствующие входы также поступают выходные сигналы от БРПУк 11, где измеряются уровни сигналов, выявляются признаки, характеризующие классы излучений сигналов. От БРС 12 по шинам данных в АРМ 10 и ЗУ 13 передаются сигналы, данные об уровнях сигналов, признаки, характеризующие классы излучений сигналов. В ЗУ 13 производится запись полученных данных. В АРМ 10 производится визуализация поступающих данных и при необходимости их аудиовоспроизведение. Таким образом, в ЗУ 13 записываются признаки классов радиоизлучения известных точно, которые используются в качестве эталонных признаков при распознавании принимаемых радиосигналов.
Чтобы выбрать одну из n антенн в АУ 1 с оптимальной ДН для радиосигнала с известным значением частоты с известным классом излучения, который в данное время принимается одним из РПУр 81…РПУр 8m в БРПУр 8, например РПУр 81, на антенну с известным номером, например №1, подключенную к антенному входу РПУр 81 при помощи одного из ПДУ 61…ПДУ 6k, например ПДУ 61, для этого при помощи АРМ 10 в одном из РПУк 111…РПУк 11r в БРПУк 11, например РПУк 111, устанавливают известное значение частоты, род работы, соответствующий известному классу излучения, а при помощи АРМ 10 и БУРК 3 подключают антенну №1 к РПУк 111. Таким образом, сигналы с выходов РПУр 81 и РПУк 111 являются сигналами от одного и того же ИРИ, которые поступают в БРС 12 где производится измерение их уровней и выявляются их признаки излучения, которые сравниваются между собой, при этом производится визуализация сигналов от обоих приемников в АРМ 10. Распознанный таким образом класс излучения записывается в ЗУ 13 в качестве эталонного. Причем уровни сигналов от РПУр 81 и РПУк 111 должны быть равны. Если уровни сигналов не равны, то они выравниваются при помощи регулировок выходных сигналов приемников. Далее при помощи АРМ 10 и БУРК 3 поочередно производят подключение антенн АУ 1 с номерами от №2 до №n включительно к антенному входу РПУк 111. При каждом подключении новой антенны производят измерение уровня сигнала, выявление признаков излучения и сравнивают их с уровнем и с признаками излучения сигнала, поступающего в это же время от РПУр 81. Сравнение признаков сигналов является одной из операций по распознаванию сигналов или классификации сигнала. После того как определен класс излучения сигнала, принимаемого РПУк 111 и он соответствует классу сигнала принимаемого РПУр 81, измеряется уровень сигнала. Таким образом, образуется матрица, показывающая зависимость уровня сигнала РПУк 111 от номера подключаемой антенны при одном и том же классе излучения при постоянной частоте настройки РПУк 111. Из матрицы согласно заданному правилу определяется номер антенны, которому соответствует максимальный уровень сигнала или максимальное отношение сигнал/шум. Определенная таким образом антенна с соответствующим номером либо подключается при помощи АРМ 10, РУ 4 и БУРК 3 к антенному входу РПУр 81, либо рекомендуется для подключения к антенному входу РПУр 81 при помощи АРМ 10, РУ 4 и ПДУ 61 в виде визуальной сигнализации в ПДУ 61. Выбранная антенна является оптимальной (наилучшей) для данного принимаемого сигнала. При изменении местоположения одного и того же ПРИ САПИ РПУ согласно описанному выше алгоритму автоматически выберет антенну, имеющую оптимальную ДН для сигнала данного ИРИ, находящегося в соответствующей точке пространства, и подключит или «порекомендует» для подключения этой антенны к антенному входу РПУр 81. В том случае, когда класс излучения сигнала принимаемого РПУк 111 не совпадает с классом излучения сигнала принимаемого РПУр 81 или класс излучения сигнала не определяется, этот сигнал исключается из рассмотрения. Сигнал, который в матрице является максимальным и класс излучения которого не совпадает с классом от РПУр 81, сравнивается с сигналами других ИРИ, принимаемых другими РПУр 82…РПУр 8m, и с эталонными сигналами ЗУ 13. Признаки сигналов, у которых определены классы излучения, номера антенн, спектрограммы (сонограммы) приема сигналов, записываются в ЗУ 13. Все записи в ЗУ 13 используются для дальнейшей работы САПИ РПУ. При использовании в РПУк 111 широкой полосы частотного обзора (режим работы «Панорама») переключение антенн АУ 1 создает матрицу «частота - номер антенны», показывающую зависимость уровней сигналов на разных частотах в диапазоне частот от номера антенны. Используя описанный выше алгоритм распознавания, САПИ РПУ автоматически определяет антенны, оптимальные для радиосигналов ряда ИРИ, и автоматически подключает или рекомендует для подключения к РПУр 81…РПУр 8m.
При известных ДН антенн и классах излучения ИРИ и необходимости определить частоты радиосигналов к антенному входу одного или нескольких из РПУк 111…РПУк 11r при помощи АРМ 10, РУ 4 и БУРК 3 автоматически подключается антенна с ДН в направлении каждого ИРИ. Далее при помощи АРМ 10 в каждом РПУк 111…РПУк 11r устанавливается амплитудный пороговый уровень ЭДС и включается сканирование по частоте, при этом на частоте, на которой обнаружен радиосигнал, превышающий заданный пороговый уровень ЭДС, в БРС 12 производится распознавание сигнала при помощи эталонных сигналов, извлекаемых из ЗУ 13. При успешном распознавании заданного класса излучения сигнала значение частоты фиксируется, и при помощи АРМ 10 и БУКР 7 настраивают один из РПУр 81…РПУр 8m на обнаруженную частоту или при помощи АРМ 10 дается рекомендация в БУКР 7 в виде визуальной сигнализации для настройки на обнаруженную частоту одного из РПУр 81…РПУр 8m. После настройки одного из РПУр 81…РПУр 8m на частоту сигнала данного класса и получения подтверждения от КПП системы радиосвязи о правильности полученного сигнала, а значит, и выбранной частоты, процесс обнаружения значения частоты радиосигнала считается законченным. При отрицательном ответе из КПП процесс поиска значения частоты продолжается. Согласно описанному алгоритму обнаружение значения частоты производится любыми РПУк 111…РПУк 11r и РПУр 81…РПУр 8m, в том числе несколькими или всеми приемниками одновременно. Решение от КПП системы радиосвязи приходит по приемопередающей линии в СДУ 5 и БУКР 7, а также по приемопередающей ВОЛС в АРМ 10.
Для определения класса радиоизлучения какого-либо сигнала при известном направлении и значении частоты ИРИ к антенному входу одного или нескольких из РПУк 111…РПУк 11r при помощи АРМ 10, РУ 4 и БУРК 3, автоматически подключается антенна с ДН в направлении ИРИ. В контрольных приемниках РПУк 111…РПУк 11r при помощи АРМ 10 устанавливают известное значение частоты. Далее в БРС 12 производится процедура распознавания принимаемого РПУк 111…РПУк 11r сигнала при помощи признаков эталонных сигналов, извлекаемых из ЗУ 13. После определения класса излучения в РПУр 81…РПУр 8m при помощи АРМ 10 и БУКР 7 устанавливается известное значение частоты и подключается известная антенна, то есть создается канал радиоприема. При получении отрицательного решения от КПП ожидание сигнала требуемого класса контрольными приемниками продолжается. При получении от КПП положительного решения о классе излучения ожидание сигналов контрольными приемниками прекращается и приемники при помощи АРМ 10 переводятся на решение других задач.
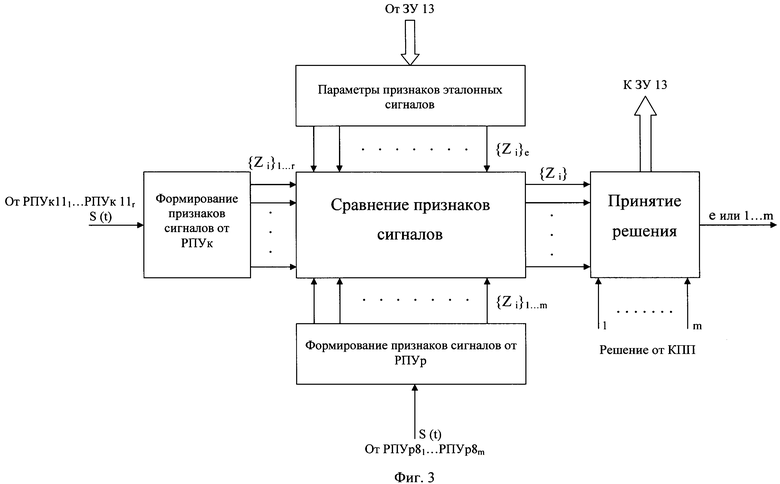
В работе предлагаемой системы большое значение имеет автоматическое распознавание принимаемых сигналов. Процессы распознавания сигналов могут быть разнообразными по своим способам, однако для многих способов распознавания существуют общие принципы. Например, процесс распознавания слов речи заключается в следующем. Вначале формируются эталоны фонем, включающие эталонные биспектральные признаки и формирование эталонных признаков слов. Формирование эталонов происходит в процессе обучения. Кроме того, эталоны также формируют в процессе работы системы. Далее формируют признаки фонем и слов принимаемого сигнала, которые сравнивают с признаками эталонов, в результате сравнения образуется массив значений показателей распознавания {Zi}, который используют для принятия решения о распознавании по определенному правилу. Также и при распознавании телеграфных и других сигналов предварительно формируют признаки эталонов {Zi}e, кроме того, признаки сигналов, распознанные в процессе работы, используют в качестве эталонных. Из цифровых отсчетов принимаемых сигналов формируют симметричные матрицы, собственные значения чисел или векторов которых используют в качестве признаков распознавания, кроме того, к признакам распознавания сигналов относятся значения частотных и фазовых отклонений, прерывистость, скорость телеграфирования и т.д. Далее полученные признаки сравнивают с эталонными признаками сигналов, в результате сравнения образуется массив показателей распознавания, которыми могут быть, например, наименьшие дисперсии с эталонными признаками. Все сформированные в процессе обучения или работы эталонные признаки телефонных и телеграфных сигналов поступают для хранения в ЗУ 13, АРМ 10, БУКР 7 и используются в описанной выше работе системы. При распознавании сигналов в реальном масштабе времени осуществляют непосредственное сравнение двух сигналов S(t) или быстро сформированных признаков сигналов {Zi}1…r и {Zi}1…m, поступающих от РПУк 111…РПУк 11r и от РПУр 81…РПУр 8m соответственно, при этом сравнение производится по форме сигналов (совпадение по амплитуде, частоте и фазе). При этом обязательно используется решение КПП о принадлежности данного радиосигнала ИРИ, о котором известны все интересующие признаки распознавания. Обобщенная структурная схема процесса распознавания приведена на Фиг.3.
В предлагаемой САПИ РПУ для борьбы с замираниями принимаемого сигнала с целью повышения помехоустойчивости приема сообщений осуществляют известный способ разнесенного приема радиосигналов.
Система позволяет осуществить прием с разнесением в пространстве, с разнесением по поляризации, с разнесением по углу места, а также комбинированный разнесенный прием. Комбинированный разнесенный прием - с разнесением в пространстве и по поляризации одновременно, или с разнесением в пространстве и по углу места одновременно, или с разнесением по поляризации и углу места одновременно, или с разнесением в пространстве, по поляризации и углу места одновременно. В предлагаемой САПИ РПУ производится автоматизированное или автоматическое подключение при помощи БПКА и АФТ 2, БУРК 3, РУ 4, ПДУ 61…ПДУ 6k, АРМ 10 необходимых антенн АУ 1 к соответствующим антенным входам БРПУр 8, РПУр 81…РПУр 8m, включаемых и настраиваемых при помощи БУКР 7, АРМ 10, выбор оптимального выходного сигнала на выходе РПУр 81…РПУр 8m, БРПУр 8 и передача этого сигнала в КПП осуществляется в БУКР 7. Кроме того, САПИ РПУ во взаимодействии с радиопередающими устройствами при помощи КПП позволяет осуществлять разнесенный прием по частоте с применением двух радиопередающих и двух радиоприемных устройств в системе радиосвязи на двух различных значениях частот при передаче и приеме одного и того же информационного сигнала.
Таким образом, предлагаемая система позволяет автоматически выбрать антенны, ДН которых направлены на ИРИ, находящиеся в произвольной точке пространства, и далее подключать или рекомендовать для подключения выбранные антенны к РПУ, что позволяет осуществить адаптивную пространственную избирательность каждого РПУ для каждого из принимаемых радиосигналов, а также осуществлять разнесенный прием радиосигналов.
Рассмотрим пример выполнения блоков и устройств, предлагаемой системы адаптивной пространственной избирательности радиоприемных устройств.
В АУ 1 могут быть применены направленные антенны типа БС 2, ЗБС 2, БШ 2, АБВ, БСВН, БСВН 2, ромбические и другие направленные высокоэффективные антенны, а также рамочные антенны, антенны типа ВГРД, ВГДШ, рупорные антенны, зеркальные параболические, вибраторные, щелевые и другие антенны, необходимые для данного диапазона радиочастот. Все применяемые антенны должны быть с горизонтальными, вертикальными и смешанными поляризациями с учетом предъявляемых требований.
БПКА и АФТ 2, БУРК 3, РУ 4, ПДУ 6, УЭ 15, ВОЛС могут быть выполнены аналогично прототипу и другим подобным элементам. АРМ 10 и БУКР 7 могут быть выполнены на базе универсальных вычислительных машин с применением АЦП AD9446 фирмы «Analog Devices», процессоров типа TMS 320C6414 фирмы Texas Instruments и ПЛИСов (FPGA) Cyclone II и ЕР2С 20-50 фирмы «Альтера», XC4VFX100-10FF1571, XC9572XL-10VQ441 фирмы «Xilinx», микросхем HEBR-5921 фирмы «Avago» и других подобных элементов.
БРС 12, БУ 14 могут быть выполнены на ПЛИСах (FPGA) Cyclone II и ЕР2С 20-50 фирмы «Альтера», XC4VFX 100-10FF1571, XC9572XL-10VQ441 фирмы «Xilinx», микросхем HEBR-5921 фирмы «Avago» и других подобных элементах.
ЗУ 13 может быть выполнено на базе жестких магнитных дисков (HDD), таких как IBM 81Y9774; Iomega 34786; Iomega 35448; Dell 400-23135 и других.
РПУк 111…РПУк 11r и РПУр 81…РПУр 8m могут быть радиоприемными устройствами с аналоговыми выходными сигналами, цифровыми электрическими и оптическими выходными сигналами типа: «Ольхон-Гелиос», «Прыжок», «Жасмин-54», «Катран», «Брусника», «Вспышка», «Рябина», «Призма», «Сапфир-04», «Сапфир-09», «Стена», «Скаляр», «AR-5000», «Rohde & Schwarz», «Жасмин-54М», «ЕМ 510» и другие. Приемопередающая линия может быть выполнена в виде ВОЛС или в виде радиорелейной линии (РРЛ) на базе радиорелейных станций (РРС) таких фирм, как «Радиан»; «Aviat Networks»; «Nokia»; «NERA»; «NEC»; «Микран» и других.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНЫЙ РАДИОЦЕНТР | 2012 |
|
RU2504902C9 |
| ПАНОРАМНЫЙ РАДИОПРИЕМНИК | 2014 |
|
RU2540825C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО ДИАПАЗОНА РАДИОПРИЕМНИКА ПО ИНТЕРМОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2542712C9 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО ДИАПАЗОНА РАДИОПРИЕМНИКА ПО ИНТЕРМОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2472166C1 |
| Способ радиоприема в широкой полосе радиочастотного спектра и радиоприемное устройство для его осуществления (варианты) | 2018 |
|
RU2687293C1 |
| Мобильная аппаратная контроля безопасности связи | 2023 |
|
RU2823040C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2019 |
|
RU2711025C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| АВТОМАТИЗИРОВАННЫЙ РАДИОПЕРЕДАЮЩИЙ УЗЕЛ | 2015 |
|
RU2604817C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2014 |
|
RU2556878C1 |
Изобретение относится к области радиотехники. Техническим результатом изобретения является обеспечение адаптивной пространственной избирательности каждого радиоприемного устройства радиосвязи (РПУр) для каждого из принимаемых радиосигналов, что повышает помехоустойчивость приема сообщений. Система адаптивной пространственной избирательности РПУ содержит блок подключения и контроля антенн и антенно-фидерных трактов (БПКА и АФТ), решающее устройство (РУ), блок усиления, разветвления и коммутации (БУРК), автоматизированное рабочее место (АРМ), систему дистанционного управления (СДУ), а также устройство электропитания (УЭ). СДУ включает k пультов дистанционного управления коммутацией антенн (ПДУ) и блок радиоприемных устройств радиосвязи (БРПУр). БРПУр содержит m радиоприемных устройств радиосвязи (РПУр). Система адаптивной пространственной избирательности РПУ дополнительно содержит антенное устройство (АУ), содержащее n направленных антенн, устройство выбора диаграммы направленности (УВДН), состоящее из блока радиоприемных устройств контроля (БРПУк), блока распознавания и сравнения сигналов (БРС), запоминающего устройства (ЗУ), буферного устройства (БУ), а также АРМ. При этом в БРПУк входит r радиоприемных устройств контроля (РПУк), а в СДУ введен блок управления и контроля радиоприемниками (БУКР). 3 ил.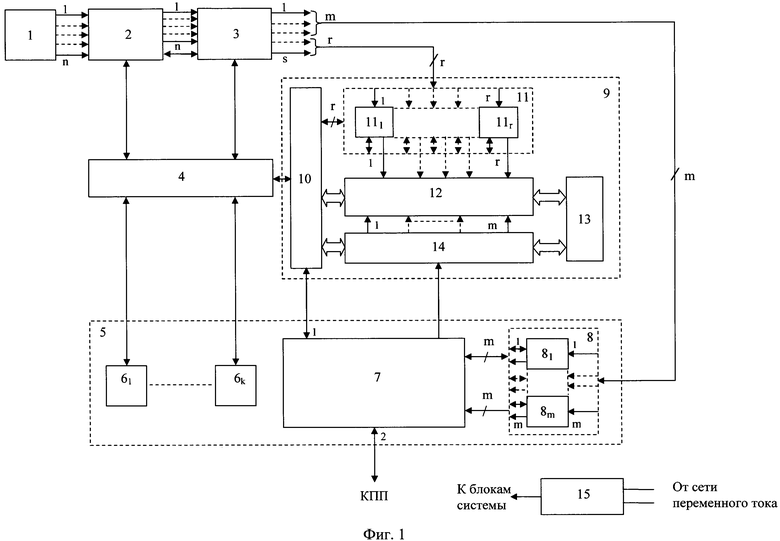
Система адаптивной пространственной избирательности радиоприемных устройств (САПИ РПУ), содержащая блок подключения и контроля антенн и антенно-фидерных трактов (БПКА и АФТ), который посредством входных/выходных ВОЛС связан с выходами/входами решающего устройства (РУ) и блока усиления, разветвления и коммутации (БУРК) соответственно, а радиочастотными (РЧ) выходами соединен посредством n РЧ кабелей с соответствующими n входами БУРК, связанного посредством входной/выходной ВОЛС с выходом/входом РУ, другие входные/выходные ВОЛС которого связаны с соответствующими выходами/входами автоматизированного рабочего места (АРМ) и системы дистанционного управления (СДУ), выходами/входами которого являются выходы/входы k пультов дистанционного управления коммутацией антенн (ПДУ), в СДУ также входит блок радиоприемных устройств радиосвязи (БРПУр), который содержит m радиоприемных устройств радиосвязи (РПУр), входы которых, являющиеся РЧ входами БРПУр и СДУ, соединены посредством m РЧ кабелей с соответствующими m выходами БУРК, в систему входит устройство электропитания (УЭ), которое обеспечивает бесперебойное электроснабжение системы от сети переменного тока, отличающаяся тем, что введено антенное устройство (АУ), содержащее n направленных антенн, которые посредством n АФТ и РЧ кабелей соединены с n входами БПКА и АФТ, при этом n выбирают из условия:
где Δφ - ширина ДН антенн в азимутальной плоскости в радианах, Δθ - ширина ДН антенн в угломестной плоскости в радианах (рад),
число m РПУр выбирают из условия:

где Δf - ширина полосы радиочастот рабочего диапазона,
ΔF - ширина полосы пропускания РПУр, при этом k определяют из условия: m/2≤k≤m,
кроме того, введено устройство выбора диаграммы направленности (УВДН), состоящее из блока радиоприемных устройств контроля (БРПУк), блока распознавания и сравнения сигналов (БРС), запоминающего устройства (ЗУ), буферного устройства (БУ), а также вышеупомянутого АРМ, при этом в БРПУк входит r радиоприемных устройств контроля (РПУк), входы которых, являющиеся РЧ входами БРПУк и УВДН, соединены посредством r РЧ кабелей с соответствующими r выходами БУРК, причем r выбирают из условия:

где Δfк - ширина контролируемого диапазона радиочастот,
ΔFк - ширина полосы пропускания мгновенного обзора РПУк,
при этом общее число РЧ выходов БУРК равно s=m+r, r выходов БРПУк, которыми являются выходы r РПУк, соединены с соответствующими r входами БРС, а r входов/выходов управления и контроля БРПУк подключены к соответствующим r выходам/входам АРМ, которое соответствующей входной/выходной ВОЛС, являющейся входной/выходной ВОЛС УВДН, подключен к соответствующему выходу/входу СДУ, которым является соответствующий выход/вход введенного в СДУ блока управления и контроля радиоприемниками (БУКР), другой соответствующий вход/выход которого, являясь соответствующим входом/выходом СДУ, при помощи приемопередающей линии связан с конечным пунктом приема (КПП), выход БУКР при помощи ВОЛС подключен к соответствующему входу УВДН, которым является вход БУ, который одной входной/выходной шиной соединен с ЗУ, а другой входной/выходной шиной соединен с АРМ, m соответствующих выходов БУ соединены с соответствующими m входами БРС, который одной входной/выходной шиной соединен с ЗУ, а другой входной/выходной шиной соединен с АРМ, в блоке БУКР m сигнальных входов и m входов/выходов контроля и управления соединены с соответствующими m сигнальными выходами и m выходами/входами контроля и управления блока БРПУр, которыми соответственно являются сигнальные выходы и выходы/входы контроля и управления m РПУр.
| ПАРОРАСПРЕДЕЛИТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ МАШИНЫ КОМПАУНД ПРЯМОГО ДЕЙСТВИЯ | 1949 |
|
SU85775A1 |
| АВТОМАТИЧЕСКИЙ КОММУТАТОР АНТЕНН | 1992 |
|
RU2038691C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 2008 |
|
RU2366047C1 |
| КОРОТКОВОЛНОВАЯ ПРИЕМНАЯ МНОГОКАНАЛЬНАЯ АНТЕННАЯ СИСТЕМА | 2010 |
|
RU2426204C1 |
| US 7043271 B1, 09.05.2006 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

