Группа изобретений относится к железнодорожной автоматике и предназначена для использования при осуществлении маневровых передвижений электроподвижных составов (ЭПС) со специфическими требованиями, прикладываемыми к монорельеовой транспортной системе.
Известны технические решения по реализации управления ЭПС на станциях и в депо, предусматривающие обмен информацией между машинистами, составителями поездов, дежурным персоналом и блок постами, а также ручное и автоматическое формирование необходимых управляющих сигналов, в том числе и с применением радиоканалов связи (RU 2179518 С2, В 61 L 27/04, 20.02.2002; RU 2111879 С1, В 61 L 17/00, 27.05.1998; RU 2168273 С2, Н 04 В 7/04, 27.05.2001).
Однако указанные технические решения имеют весьма узкую область практического использования и не охватывают, в частности, монорельсовые транспортные системы.
Известны также системы и способы, относящиеся к управлению маневровыми работами в монорельсовых транспортных системах (RU 2181328 С1, В 61 В 13/04, 20.04.2002; RU 2205761 С1, В 61 В 1/00, 10.06.2003; RU 2167403 С1, G 01 М 17/08, 20.05.2001).
Из перечисленных известных наиболее близкой к предложенной системе является система управления маневровыми работами в электродепо монорельсовой транспортной системы, выполненная на основе цифрового вычислительного комплекса, соединенного проводными и/или беспроводными линиями связи с абонентскими устройствами распределенных вне и внутри депо стационарных и мобильных объектов управления (RU 2167403 С1, G 01 М 17/08, 20.05.2001).
Из перечисленных известных наиболее близким к предложенному способу является способ управления маневровыми работами в электродепо монорельеовой транспортной системы, согласно которому с помощью вычислительного комплекса производят сбор информации со стационарных и мобильных объектов управления, сравнивают полученные данные с расчетными и вырабатывают управляющие сигналы для объектов управления (RU 2167403 С1, G 01 М 17/08, 20.05.2001).
Недостаток названных системы и способа определяется ограниченными функциональными возможностями, не обеспечивающими выполнение широкого комплекса установочных, подготовительных и распределительных мероприятий.
Техническим результатом, достигаемым с помощью данной группы изобретений, является повышение эффективности маневровых работ в электродепо монорельсовой транспортной системы за счет оптимизации управления.
Для получения отмеченного технического результата система управления маневровыми работами в электродепо монорельсовой транспортной системы, состоящем из нескольких внешних и внутренних парковочных путей для электроподвижных составов соответственно перед въездными и выездными воротами и внутри депо, а так же трансбордера, содержащая цифровой вычислительный комплекс, соединенный проводными и/или беспроводными линиями связи с распределенными вне и внутри депо стационарными и мобильными объектами управления, снабженными абонентскими устройствами, снабжена распределенной вдоль парковочных путей приемопередающей антенной, выполненной в виде радиоизлучающего кабеля, а также датчиками состояния стационарных и мобильных объектов управления, стационарными и мобильными устройствами формирования управляющих сигналов и системой определения положения электроподвижных составов, стационарные объекты управления сгруппированы в устройство отображения мнемонической схемы электродепо, привод звонка громкого боя, приводы ворот и трансбордера, светофоры, мобильные объекты управления сгруппированы в электроподвижные составы, находящиеся соответственно на парковочных путях вне и внутри депо, а так же на трансбордере, стационарные устройства формирования управляющих сигналов сгруппированы в автоматизированные рабочие места со стационарными пультами управления, а мобильные устройства формирования управляющих сигналов - в носимые пульты дистанционного управления дежурного по электродепо и кабины управления электроподвижными составами, при этом стационарные объекты управления, датчики состояния, расположенные на них, автоматизированные рабочие места и система определения положения электроподвижных составов соединены с вычислительным комплексом проводными и/или беспроводными линиями связи посредством блоков доступа, а мобильные объекты управления и датчики, расположенные на них, соединены с вычислительным комплексом беспроводными линиями связи посредством блоков доступа.
Получению технического результата способствуют частные существенные признаки первого из группы изобретений.
Система управления снабжена коммутатором, соединяющим по проводным линиям связи вычислительный комплекс и стационарные объекты управления, датчики, расположенные на них, автоматизированные рабочие места и систему определения положения электроподвижных составов.
В системе управления датчики состояния на стационарных объектах выполнены в виде путевых датчиков положения электроподвижного состава, считывателей идентификационных номеров электроподвижного состава и номера текущей позиции трансбордера, датчиков положения ворот депо, датчиков наличия напряжения на внутренних и внешних парковочных путях электродепо, датчиков ручных размыкателей.
Система управления снабжена устройствами для оперативной связи, выполненных в виде IР-телефонов.
В системе управления блок доступа выполнен в виде радиопередающего и радиоприемного устройства, обеспечивающего настройку на диапазон частот 2,412-2,472 ГГц.
В системе управления автоматизированное рабочее место диспетчера депо выполнено на базе персонального компьютера.
В системе управления носимый пульт дистанционного управления дежурного по электродепо представляет собой малогабаритное мобильное устройство с цветным экраном со встроенным интерфейсом, поддерживающим протокол 802. 11b, и выполнен с возможностью отображения команд, поступающих от диспетчера депо, отображения текущей информации о положении электроподвижного состава на путях депо, отображения текущей информации о наличии напряжения 600 В на путях депо, отображения текущей информации о состоянии и положении трансбордера, отображения текущей информации о положении въездных и выездных ворот депо и возможностью управления положением ворот депо и подтверждения разрешения движения электроподвижного состава.
В системе управления устройство отображения мнемонической схемы депо, представляющее собой информационное табло, выполнено на плазменной панели большого размера, размещаемой на стене перед столом рабочего места диспетчера депо, и предназначено для отображения текстовой и графической информации, необходимой для наблюдения за ходом выполнения технологических процессов и операций депо и принятия оперативных решений, при этом верхняя часть экрана служит для вывода панели текущей информации рабочего дня: дня недели, текущей даты - числа, месяца, года, текущего времени - часов, минут, секунд и числа исправных электроподвижных составов в депо, ниже находится панель отображения состояния основных узлов и элементов системы управления, которые отображаются в виде снабженных наименованием объекта квадратов, зеленый фон которых означает норму, а желтый - отклонение от нормы, остальная область экрана отведена под графическое изображение схемы депо с возможностью отображения на графической схеме статических объектов, в том числе контура депо, изображения и наименования секций путей, а также объектов, в том числе светофоров путей депо, троллей секций путей, датчиков положения электроподвижного состава, въездных и выездных ворот, трансбордера.
В системе управления на каждом пути в начале и в конце установлены по два датчика положения электроподвижного состава, первый из которых установлен в месте остановки головного вагона, а второй - в месте остановки хвостового вагона, при этом пластины, обеспечивающие срабатывание датчиков, установлены соответственно на головном и хвостовом вагонах электроподвижного состава.
В системе управления над секциями путей депо и на трансбордере или с правой стороны от них установлены светофоры красного цвета и световые указатели зеленного цвета, световые указатели зеленного цвета выполнены в виде стрелок, указывающих разрешенное направление движения, и установлены с возможностью постоянного нахождения в поле зрения оператора электроподвижного состава независимо от направления движения, которое разрешено только при включенной зеленной стрелке в указанном направлении и погашенном красном.
Для получения отмеченного технического результата в способе управления маневровыми работами в электродепо монорельсовой транспортной системы, состоящем из нескольких внешних и внутренних парковочных путей для электроподвижных составов соответственно перед выездными и выездными воротами и внутри депо, а так же трансбордера, согласно которому с помощью вычислительного комплекса производят сбор информации со стационарных и мобильных объектов управления, осуществляют сравнение полученных данных с расчетными значениями и на основе сравнения посылают управляющие сигналы на объекты управления, сбор информации и передачу управляющих сигналов на стационарные и мобильные объекты управления осуществляют при приеме электроподвижных составов в электродепо с трассы монорельсовой транспортной системы, при их выводе из электродепо на трассу и при их перестановке внутри электродепо с использованием стационарных пультов управления на автоматизированных рабочих местах по проводным линиям связи, соединяющим их с вычислительным комплексом по “звездной” топологии, и по беспроводным линиям связи с использованием территориально распределенной антенны, выполненной в виде отрезков радиоизлучающего кабеля, кабины управления электроподвижными составами и носимых пультов дистанционного управления, при этом текущее состояние объектов управления отображают в динамическом режиме на панели информационного табло.
Получению технического результата способствуют частные существенные признаки второго из группы изобретений.
В способе управления со стационарных пультов управления осуществляют формирование управляющих сигналов по координации работы всех служб электродепо, контролю работы, выполняемой дежурным по депо и службой технического обслуживания и ремонта электроподвижных составов, запросу на включение/выключение питания и занесение результатов выполнения в информационную базу, контролю над соблюдением графика вывода на трассу и приема электроподвижных составов, выдаче команд разрешений на тестирование электроподвижных составов, выдаче команд для вывода электроподвижных составов на трассу, в том числе по запросу от диспетчера движения, выдаче команд на прием электроподвижных составов в электродепо, принятию решения о замене электроподвижных составов по результатам тестирования и взаимодействию с диспетчером движения.
В способе управления с носимых дистанционных пультов управления осуществляют формирование управляющих сигналов по организации процесса перемещения - маневрирования электроподвижных составов внутри электродепо, сбору маршрута, подаче и снятию высокого напряжения с секций путей электродепо, управлению трансбордером, а также выводу электроподвижных составов из электродепо и приему их в электродепо.
В способе управления из кабины управления электроподвижными составами осуществляют формирование управляющих сигналов по организации процесса решения задач ввода, вывода и маневрирования в депо, по управлению электроподвижным составом в регламентном режиме при перемещении электроподвижных составов на внутренних и внешних путях электродепо, по запросу разрешения на тестирование и диагностику систем электроподвижных составов у диспетчера электродепо, по тестированию и диагностике систем электроподвижных составов в соответствие с утвержденным графиком или по команде от диспетчера депо, по выдаче результатов тестирования диспетчеру депо.
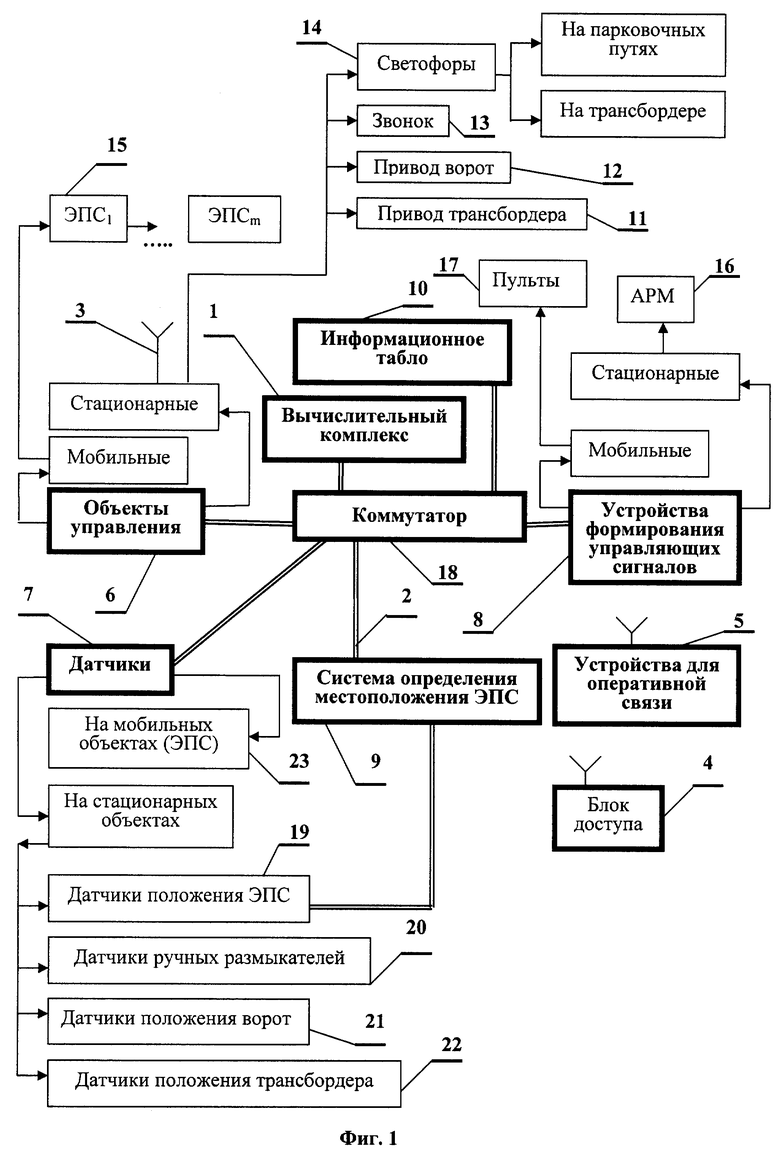
На фиг.1 представлена блок-схема системы управления маневровыми работами в электродепо монорельсовой транспортной системы.
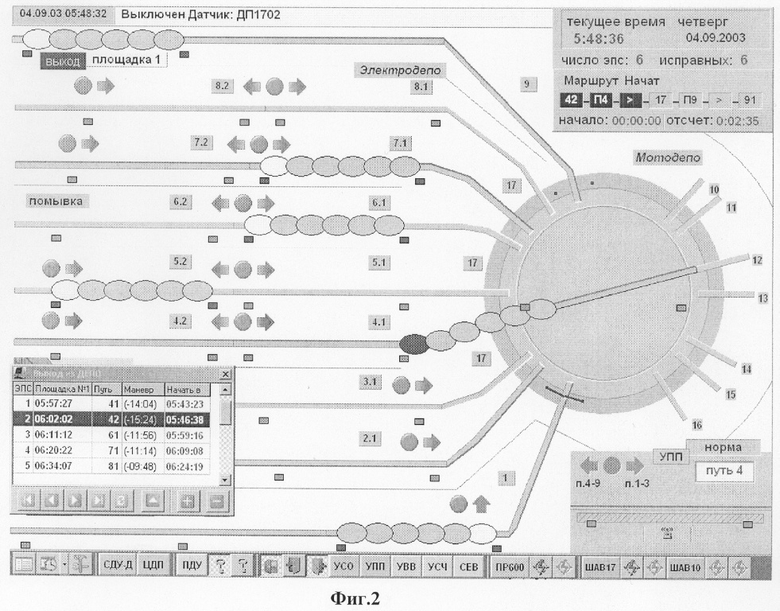
На фиг.2 представлена панель информационного табло системы управления маневровыми работами в электродепо монорельсовой транспортной системы.
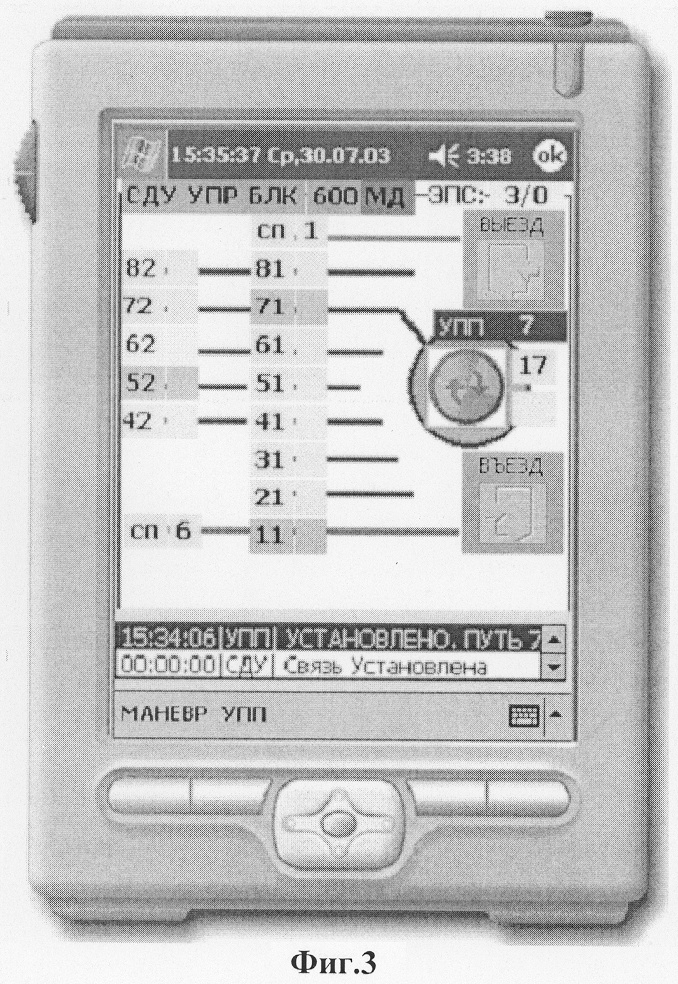
На фиг.3 представлен пульт дистанционного управления системы управления маневровыми работами в электродепо монорельсовой транспортной системы.
Способ управление маневровыми работами в электродепо (далее по тексту может быть - депо) монорельсовой транспортной системы (МТС) включает три процедуры: прием электроподвижных составов (ЭПС) в депо с трассы МТС; вывод ЭПС из депо на трассу МТС и перестановка ЭПС внутри депо, при этом участвуют должностные лица: диспетчер депо (ДД), дежурный по депо (ДПД), оператор ЭПС.
Диспетчер депо является руководителем и ответственным за работу депо. Он осуществляет координацию работы всех служб депо; контроль работы, выполняемой дежурным по депо и службой технического обслуживания и ремонта ЭПС; запрос на включение/выключение электропитания и занесение результатов выполнения в информационную базу; контроль над соблюдением графика вывода на трассу и приема ЭПС; выдачу команд (разрешений) на тестирование ЭПС; выдачу команд для вывода ЭПС на трассу, в том числе по запросу от диспетчера движения; выдачу команд на прием ЭПС в депо; принятие решения о замене ЭПС по результатам тестирования; взаимодействие с диспетчером движения.
Дежурный по депо является непосредственным организатором и исполнителем процесса перемещения (маневрирования) ЭПС внутри депо, сбора маршрута, подачи и снятия высокого напряжения электропитания с секций путей депо, управления трансбордером - устройством поворотным парковочным (УПП), а также вывода ЭПС из депо и приема их в депо.
Оператор ЭПС в процессе решения задач ввода, вывода и маневрирования в депо осуществляет управление ЭПС в регламентном режиме при перемещении ЭПС на внутренних и внешних путях депо; запрос разрешения на тестирование и диагностику систем ЭПС у диспетчера депо; тестирование и диагностику систем ЭПС в соответствие с утвержденным графиком или по команде от диспетчера депо; выдачу результатов тестирования диспетчеру депо.
Автоматизация процессов управления маневровыми работами в депо обеспечивается системой управления маневровыми работами в электродепо монорельсовой транспортной системы. Депо может содержать несколько внешних и внутренних парковочных путей для электроподвижных составов соответственно перед выездными и выездными воротами и внутри депо, а так же трансбордер, предназначенный для перестановок ЭПС на требуемый путь в депо, и его основным элементом является поворотная балка.
Система управления маневровыми работами в электродепо содержит (фиг.1) цифровой вычислительный комплекс 1, соединенный проводными 2 и беспроводными 3 линиями связи посредством блоков доступа 4 или устройствами для оперативной связи 5 с распределенными вне и внутри депо объектами управления 6 - стационарными и мобильными, снабженными абонентскими устройствами. Беспроводной блок доступа выполнен в виде радиопередающего и радиоприемного устройства, обеспечивающего настройку на диапазон частот 2,412-2,472 ГГц. Устройства для оперативной связи выполнены в виде IР-телефонов. Вычислительный комплекс выполнен в виде сервера с соответствующим программным обеспечением.
Система управления маневровыми работами в электродепо снабжена распределенной вдоль парковочных путей приемопередающей антенной, выполненной в виде радиоизлучающего кабеля, а также снабжена датчиками 7 состояния стационарных и мобильных объектов управления, устройствами формирования управляющих сигналов 8, выполненными стационарными и мобильными, и системой определения положения электроподвижных составов 9.
Стационарные объекты управления сгруппированы соответственно в устройство отображения мнемонической схемы электродепо - информационное табло (ИТ) 10, приводы трансбордера 11, ворот 12, звонка громкого боя 13 и светофоры 14 - соответственно на трансбордере и на парковочных путях.
Мобильные объекты управления сгруппированы в электроподвижные составы 15, находящиеся соответственно на парковочных путях вне и внутри депо, а так же на трансбордере.
Стационарные устройства формирования управляющих сигналов сгруппированы в автоматизированные рабочие места со стационарными пультами управления диспетчера депо (АРМ) 16, а мобильные - в носимые пульты дистанционного управления дежурного по электродепо (ПДУ) 17. АРМ выполнено на базе персонального компьютера.
Стационарные объекты управления, датчики, расположенные на них, автоматизированные рабочие места, система определения положения электроподвижных составов и информационное табло соединены с вычислительным комплексом проводными и беспроводными линиями связи посредством блоков доступа, а мобильные объекты управления и датчики, расположенные на них, соединены с вычислительным комплексом беспроводными линиями связи посредством блоков доступа. Обмен информацией между устройствами осуществляется через локальную вычислительную сеть непосредственно или через устройства сопряжения и обмена (УСО).
Система управления снабжена коммутатором 18, соединяющим по проводным линиям связи вычислительный комплекс и стационарные объекты управления, датчики, расположенные на них, автоматизированные рабочие места, систему определения положения электроподвижных составов и информационное табло.
Датчики на стационарных объектах выполнены в виде путевых датчиков положения (ПДП) 19 положения электроподвижного состава, считывателей идентификационных номеров (на фиг.1 не показаны) электроподвижного состава, датчиков наличия напряжения на внутренних и внешних парковочных путях электродепо (на фиг.1 не показаны) и на путях трансбордера, датчиков ручных размыкателей 20, датчиков номера текущей позиции трансбордера (положения трансбордера) 21, датчиков положения ворот депо 22. Датчики 23 на мобильных объектах управления (на электроподвижных составах) предназначены для передачи сигналов о состоянии тестируемых систем ЭПС.
Выбрана следующая нумерация путей в электродепо и соответствующее размещение ПДП и элементов световой сигнализации. На фиг.2 изображены пути. Перед въездными воротами на площадке №6 расположен путь №1 с секциями №1.1 и №1.2, номера путей П0101 и П0102 соответственно. После выездных ворот на площадке №1 расположен путь №9. Внутри депо расположены остальные пути. Путь №2 с одной секцией №2.1 предназначен для диагностики размещенного на нем ЭПС, номер пути П0201. Путь №3 с одной секцией №3.1 предназначен для текущего ремонта размещенного на нем ЭПС, номер пути П0301. Пути №4, №5, №7 и №8 соответственно с двумя секциями №4.1, №4.2, №5.1, №5.2, №7.1, №7.2, №8.1 и №8.2 каждый предназначены для отстоя размещенных на них ЭПС, номера путей П0401, П0402, П0501, П0502, П0701, П0702, П0801 и П0802 соответственно. Путь №6, секция №6.1 которого предназначена для отстоя размещенного на ней ЭПС, и секция №6.2 которого предназначена для наружной помывки размещенного на ней ЭПС, номера путей П0601 и П0602 соответственно. Путь №17 секция УПП, номер БП1701.
На каждой секции пути, в том числе и на трансбордере, в начале ее и в конце устанавливаются по два датчика положения ЭПС. Один датчик установлен в месте остановки головного вагона, отмеченного сигнальным знаком “Остановка первого вагона”, второй - в месте остановки хвостового вагона. Пластины, обеспечивающие срабатывание датчиков, устанавливаются соответственно на головном и хвостовом вагонах ЭПС. Номера датчиков: ДП0101; ДП0102; ДП0103; ДП0104; ДП0201; ДП0202; ДП0301; ДП0302; ДП0401; ДП0402; ДП0403; ДП0404; ДП0501; ДП0502; ДП0503; ДП0504; ДП0601; ДП0602; ДП0701; ДП0702; ДП0703; ДП0704; ДП0801; ДП0802; ДП0803; ДП0804; ДП0901; ДП0902; ДП1701; ДП1702.
Над секциями путей депо и на трансбордере или с правой стороны от них устанавливаются светофоры красного цвета и световые указатели зеленного цвета. Световые указатели зеленного цвета выполняются в виде стрелок, указывающих разрешенное направление движения ЭПС, и устанавливаются таким образом, чтобы всегда находились в поле зрения оператора ЭПС независимо от направления движения. Движение ЭПС в депо разрешается только при включенной зеленной стрелке в указанном направлении и погашенном красном светофоре. Красные светофоры запрещают движение ЭПС и включаются по команде системы управления в момент, когда ЭПС занимает положение над датчиками положения. Номера световых указателей зеленых: СЗ0101; СЗ0201; СЗ0301; СЗ0401; СЗ0402; СЗ0403; СЗ0501; СЗ0502; СЗ0503; СЗ0601; СЗ0602; СЗ0701; СЗ0702; СЗ0703; СЗ0801; СЗ0802; СЗ0803; СЗ01701; СЗ1702.
Номера светофоров красных: СК0101; СК0201; СК0301; СК0401; СК0402; СК0501; СК0502; СК0601; СК0701; СК0702; СК0801; СК0802; СК1701.
Информационное табло выполнено на плазменной панели большого размера и размещается на стене перед столом рабочего места диспетчера депо, и предназначено для отображения текстовой и графической информации, необходимой для наблюдения за ходом выполнения технологических процессов и операций депо и принятия оперативных решений. Пример экранной формы приведен на фиг.2.
В верхней части экрана выводится панель текущей информации рабочего дня: день недели, текущая дата (число, месяц, год); текущее время (часы, минуты, секунды); число исправных ЭПС в депо.
Ниже находится панель отображения состояния основных узлов и элементов системы управления; вычислительный комплекс (сервер); рабочие места; контроллеры УСО, УПП и УВВ; подача 600В на ПР-1 (основной), ПР-2 (резервный), ШАВ10, ШАВ17 (УПП).
Перечисленные объекты отображаются в виде квадратов с наименованием объекта. Зеленый фон квадрата означает норму, желтый - отклонение от нормы.
Остальная область экрана отводится под графическое изображение схемы депо. На графической схеме отображаются следующие статические объекты: контур депо; изображение и наименование секций путей. На графической схеме отображаются следующие динамические объекты: светофоры секций путей депо; троллеи секций путей депо; датчики положения ЭПС; въездные и выездные ворота; круг с поворотной балкой трансбордера, ЭПС.
Первая группа динамических объектов автоматически изменяет свой цвет в зависимости от состояния соответствующих контролируемых параметров. Световые указатели, разрешающие движение, показаны в виде стрелок. При включении указателя цвет стрелок - зеленый. Светофоры парковки ЭПС на путях отстоя и УПП при включении изображаются красным цветом. Датчики положения изображены в виде квадратов и при замыкании контактов меняют желтый цвет на синий. При подаче 600В на соответствующих путях схемы линии троллей и площадки секций меняют серый цвет на красный.
Другая группа динамических объектов эмулирует движение: две утолщенные линии в месте пересечения контура депо с путями эмулируют положение ворот (открытие и закрытие створок ворот); изображение поворотной балки имитирует вращение УПП. Система идентификации положения УПП с помощью считывателя корректирует динамику вращения. Шесть соприкасающихся окружностей эмулируют на схеме ЭПС его перемещение в соответствии с динамикой замыкания/размыкания датчиков положения, информацией от считывателя на УПП и заданным маршрутом движения.
Пульт дистанционного управления (ПДУ) представляет собой малогабаритное мобильное устройство (фиг.3) с цветным экраном со встроенным интерфейсом, поддерживающим протокол 802.11b. Программа управления маневрированием поездов предоставляет дежурному по депо интерактивный и графический интерфейс управления технологическими операциями и процессами в депо. Программа взаимодействует с АРМ диспетчера депо и контроллерами объектов депо через сервер.
ПДУ дежурного по депо имеет возможность отображать команды, поступающие от диспетчера депо; отображать текущую информацию о положении ЭПС на секциях путей депо; отображать текущую информацию о наличии напряжения 600В на шкафах ШАВ депо и на секциях путей депо; отображать текущую информацию о состоянии и положении УПП; отображать текущую информацию о положении въездных и выездных ворот депо; обеспечивать возможность вызова УПП в требуемое положение; обеспечивать возможность управления положением ворот депо; обеспечивать возможность выдачи в систему управления сигнала подтверждения разрешения движения ЭПС.
Процесс управления маневровыми работами в депо предполагает выполнение следующих функций: определение исходного пути и пути назначения (внешние и внутренние пути депо и секции парковки); разворот трансбордера в требуемую позицию; подача предупредительной сигнализации о предстоящей подаче высокого напряжения на секции внутренних путей депо; подача высокого напряжения на секции путей депо, по которым должен проследовать ЭПС; открытие въездных (выездных) ворот (при необходимости); выдача команды (разрешения) на движение ЭПС на трансбордер и с трансбордера; снятие высокого напряжения с секций внутренних путей депо.
При разработке алгоритмов управлении маневрированием ЭПС в депо учитывались следующие специфические требования, характерные для монорельсового транспорта МТС, отличающие его от ЭПС метрополитена: кабина оператора ЭПС расположена только с одной стороны состава в его головной части; парковочные пути не имеют сквозного проезда (должно обеспечиваться движение задним ходом); троллеи электропитания тяговых двигателей ЭПС расположены только с одной стороны состава с правой стороны по ходу поезда; ЭПС всегда состоит из одного и того же количества вагонов (из 6); парковка ЭПС может осуществляться по два ЭПС (один за другим) на один путь ("яму").
ПДП формируют электрические сигналы при наличии ЭПС на парковочных путях депо и УПП, когда головной и хвостовой вагоны ЭПС проходят или останавливаются над ними. Зеленые световые указатели включаются по команде системы управления при одновременном выполнении следующих условий: секция пути в указываемом направлении свободна - не включены датчики положения пути; УПП готово принять ЭПС с этого пути; на секцию пути в указываемом направлении подано напряжение 600В; на СДУ-Д поступила команда дежурного по депо с мобильного ПДУ.
После включения ПДУ и загрузки ПО ПДУ подключается к серверу и выводит начальный экран информационного табло. Верхняя строка экрана - строка состояния основных подсистем: надпись “СДУ” на зеленом фоне обозначает норму подключения к СДУ-Д, на красном фоне - потеря соединения с СДУ-Д; надпись “УПР” на зеленом фоне обозначает норму состояния канала управления. Красный фон - аварийное состояние канала управления; надпись БЛК на зеленом фоне обозначает, что с ПДУ разрешена работа (снята блокировка), на красном фоне - ПДУ заблокирован; надпись “600” на зеленом фоне обозначает, что тяговая подстанция подала напряжение 600В на шкафы ШАВ путей депо. Красный фон - отсутствие напряжения; надпись МД на зеленом фоне обозначает, что на пути депо подано напряжение 600В, на красном фоне - напряжение отсутствует; надпись “ЭПС 5/0” указывает, что в депо в настоящий момент находится 5 ЭПС, из которых 0 неисправны или проходят техническое обслуживание.
Под строкой состояния находится область вывода графической схемы депо для наглядной визуализации положения ЭПС на путях депо, а также наличия высокого напряжения и состояния датчиков и исполнительных устройств: при включении 600В цвет путей меняется с синего на красный; при замыкании датчиков положения квадраты, изображающие площадки секций путей, в том числе и на УПП, меняют светло-желтый цвет на бирюзовый, что указывает на наличие ЭПС на этой секции; при открытии ворот появляются цветные иконки с изображением открытых ворот; при фиксации балки показывается линия, соединяющая изображение трансбордера с линией соответствующего пути; при развороте УПП значок изображения УПП имитирует вращение; над значком, обозначающим УПП, выводится поле, отображающее на синем фоне текущее положение УПП (УПП 7 - номер пути фиксации поворотной балки).
При движении УПП информация выводится в виде строки из двух цифр, обозначающих номер пути, связанных знаком “>”. Строка имеет формат: “предыдущее положение УПП>заданное положение УПП”, например 5>7. Это обозначает: УПП разворачивается с пути №5 на путь №7.
Ниже схемы электродепо находится журнал событий, в котором фиксируются действия дежурного и изменения контролируемых параметров. Журнал занимает две строки и может быть расширен на половину экрана. Размер окна журнала меняется с помощью кнопок “вправо” и “влево”, размещенных ниже экрана.
Под журналом на сером фоне выводятся наименования пунктов меню, для выбора которых используются четыре кнопки пульта, находящиеся под экраном.
Имеется также ряд скрытых окон (список выбора пункта меню, мнемосхема выбора и отработки маршрута движения), которые появляются на экране в соответствии с контекстом меню в процессе функционирования алгоритмов управления маневрированием ЭПС в депо.
Использование ПДУ в процессе управления маневрированием ЭПС в депо поясняется при описании соответствующих алгоритмов.
Рассмотрим алгоритм приема ЭПС в депо.
На площадку №6 трассы МТС ЭПС прибывает по графику в случае планового схода с трассы или вне графика по другой причине по команде диспетчера движения СЦДУ. По прибытии на площадку №6 оператор ЭПС связывается с диспетчером депо по диспетчерской связи и сообщает ему о техническом состоянии ЭПС и своей готовности проследовать в депо. Диспетчер депо видит на информационном табло положение прибывшего ЭПС и по диспетчерской связи сообщает оператору ЭПС о том, что принимает ЭПС под свое управление. С этого момента и далее по территории депо оператор ЭПС осуществляет движение в регламентном (ручном) режиме по командам СДУ-Д, предусматривающем автоматическое ограничение максимально допустимой скорости движения. Команды системы управления доводятся до оператора ЭПС в виде сигналов светофоров, световых указателей либо, при необходимости, по диспетчерской связи.
Диспетчер депо, используя АРМ, с учетом технического состояния прибывшего ЭПС принимает решение о месте (секции пути) парковки прибывшего ЭПС и выдает со своего АРМ команду дежурному по депо принять ЭПС на выбранный путь. Команда дежурному по депо поступает на мобильный пульт дистанционного управления. Приняв команду, дежурный по депо отправляет диспетчеру депо донесение, подтверждающее факт приема команды.
Убедившись по изображению на ИТ в том, что перед въездными воротами путь свободен, диспетчер депо дает по диспетчерской связи разрешение оператору ЭПС проследовать на участок пути перед въездными воротами (до въездного красного светофора). Оператор ЭПС выполняет команду диспетчера депо, следует до въездного красного светофора СК0101 и останавливается у знака остановка первого вагона, расположенного перед этим светофором.
Получив команду диспетчера депо, дежурный по депо приступает к сбору маршрута. Сбор маршрута дежурный может осуществлять с помощью мобильного пульта дистанционного управления в одном из двух режимов: диспетчерском и автономном.
Основной режим работы ПДУ - диспетчерский. В этом режиме на ПДУ ДПД от АРМ ДД выдается номер пути назначения, на который должен быть принят ЭПС. Маршрут движения рассчитывается автоматически и отображается на экране ПДУ в виде мнемосхемы. Для привлечения внимания дежурного при приеме маршрута подается звуковой сигнал.
Из представленной формы ДПД получает следующую информацию: на секции №1.1 (первый путь первая секция) находится ЭПС, который необходимо принять в депо; на пути №1 и №9 подано напряжение 600В (красный цвет); на остальных путях депо отсутствует напряжение 600В (синий цвет); секции №5.2 и №7.1 внутренних путей депо заняты (на них находятся ЭПС); УПП находится в положении путь №7; процедура приема ЭПС состоит из следующих операций (строка маршрут): разворот УПП в положение путь №1 (квадрат П1); разрешение на движение на путь №17 через включение зеленного светового указателя СЗ0101 (квадрат со знаком >); заезд ЭПС на УПП путь №17 (квадрат 17); разворот УПП в положение путь №3; разрешение на движение на путь №3 через включение зеленного светового указателя СЗ1701 (квадрат со знаком >); заезд ЭПС на секцию пути.
Для исполнения полученной команды ДПД подтверждает необходимость начала маневра, для чего нажимает клавишу, расположенную под надписью “ВЫПОЛНИТЬ”.
Для повышения безопасности маневровых работ в депо выбран режим выполнения команд, требующий от ДПД на каждой стадии процедуры приема ЭПС введения подтверждения выполнения команды путем нажатия клавиши “ВЫПОЛНИТЬ” в ответ на заданный СДУ-Д вопрос. Прежде, чем ввести команду “ВЫПОЛНИТЬ”, ДПД в каждом конкретном случае осматривает выбранный путь и УПП на предмет отсутствия видимых препятствий для движения ЭПС, повреждений, а также персонала в зоне выбранного пути.
После нажатия клавиши “ВЫПОЛНИТЬ” появится соответствующая форма на экране ПДУ. Эта форма информирует ДПД о том, что начался процесс разворота УПП на путь №1 и выполнена команда “Открыть въездные ворота”. По завершении процесса вывода УПП на путь №1 появится соответствующая экранная форма на ПДУ.
ДПД предлагается подать напряжение 600В на №17 путь (УПП). ДПД с помощью ручных размыкателей шкафов ШАВ подает на секцию П1701 УПП напряжение 600В, предварительно включив с помощью шкафа ШУС предупреждающую звуковую и световую сигнализацию. После подачи 600В на УПП появится экранная форма с запросом на разрешение движения на УПП.
После нажатия кнопки “ВЫПОЛНИТЬ” гасится красный светофор на пути №1 и зажигается зеленный световой указатель (стрелка), указывающий оператору ЭПС на то, что ему разрешено движение в указанном направлении до красного светофора. Эта ситуация отражается в соответствующей экранной форме, на которой знак “>” обозначает включенный световой указатель (стрелку), разрешающий движение в указанном направлении.
Получив разрешение, оператор ЭПС начинает движение на путь №17 УПП и продолжает его до знака “остановка первого вагона” на УПП. После того, как ЭПС занимает правильное положении на пути №17, срабатывают датчики положения ДП1701 и ДП1702, установленные на УПП. По сигналам этих датчиков включается красный светофор, запрещающий дальнейшее движение ЭПС, при этом оператор ЭПС включает режим торможения и останавливает ЭПС.
СДУ-Д попросит подтвердить факт завершения заезда ЭПС на УПП, запросит разрешение на разворот УПП на путь парковки №3, а после выполнения разворота напомнит о подаче 600В.
Если была подана команда “ВЫПОЛНИТЬ” съезд на путь парковки 3 без выполнения необходимых условий, например без подачи 600В, появится соответствующая экранная форма.
По мере движения ЭПС на путь №3.1 срабатывают датчики ПДП0301 и ПДП0302, СДУ-Д выключает зеленый указатель С31702 на УПП и включает красный светофор СК0301 на пути №3.1. Оператор ЭПС включает режим торможения и останавливает ЭПС у знака остановка первого вагона перед красным светофором СК0301. На экране ПДУ ДПД появляется соответствующая форма. ДПД нажатием клавиши “ВЫПОЛНИТЬ” на ПДУ подтверждает позиционирование ЭПС на пути №3.1.
Процедура приема ЭПС в депо завершается снятием напряжения 600В с троллей пути 3.1. Об этом на табло ПДУ будет выдана подсказка дежурному по депо.
После чего ДПД выполняет следующие операции: с помощью ручного размыкателя отключает 600В на пути №3.1 и на УПП; проверяет отключение световой сигнализации наличия напряжения на пути №3.1; сообщает оператору ЭПС по мобильной связи о приемке ЭПС службой депо и разрешает покинуть ЭПС; после снятия напряжения 600В с пути №3.1 и УПП процедура приема ЭПС считается законченной.
В отличие от диспетчерского режима в автономном режиме путь назначения выбирается ДПД самостоятельно и задается через меню ПДУ.
Сначала выбирается меню “МАНЕВР”, затем в открывшемся окне “ПРИЕМ ЭПС” и, наконец, путь назначения “-путь №3.1”.
Маршрут рассчитывается автоматически по ПДУ и выводится на экран ИТ.
Далее все действия ДПД аналогичны описанным выше при приеме ЭПС в диспетчерском режиме с момента появления на экране ПДУ маршрута. За ходом выполнения процедуры приема ЭПС ДД имеет возможность наблюдать в реальном времени на ИТ.
Ниже приводится алгоритм процедуры “Прием ЭПС”.
Стрелкой “>” указано направление передачи команды или донесения. УСО - устройство сопряжения и обмена с датчиками и исполнительными модулями.
Исходные данные: путь УПП - П0701; путь приема ЭПС - П0301.
Выбор пути назначения с использованием АРМ-ДД>СДУ-Д: выбор маршрута движения; задача= “Прием ЭПС”; путь А=П0101 (исходный путь), путь В=П0301 (путь назначения), время исполнения=“6:40”; с использованием СДУ-Д>ПДУ (прием и отображение маршрута движения): “Путь 1/1>Путь 3/1” и запуск таймера отсчета времени исполнения. ПДУ>СДУ-Д: Подтверждение маршрута (или отмена *). СДУ-Д>АРМ-ДД; Вывод сообщения: “Маршрут движения принят” или “Отмена выбранного маршрута”.
Подготовка приема ЭПС в депо. ПДУ>СДУ-Д: Команда СУ УПП “Разворот: путь 1”. СДУ-Д>ПДУ: проверка условий начала разворота: отсутствие 600В на пути №17 и пути установки УПП. Выдача на ПДУ подсказки о неготовности. СДУ-Д>ПДУ: команда на разворот принята СУ УПП, индикация направления вращения “7>1”. СДУ-Д>ПДУ: донесение СУ УПП “готово: путь 1”. СДУ-Д>УСО: автоматическое открытие ворот В01.
Движение ЭПС на УПП. ДПД>ШАВ-17: подать 600В полной мощности на УПП. СДУ-Д>ПДУ: индикация на ПДУ включения 600В. ПДУ>СДУ-Д: команда СДУ-Д “движение: путь 1/1>путь 17”. СДУ-Д>ПДУ: проверка условий начала движения (занятость секций на пути движения, наличие 600В на путях ПО 101, П 1701, фиксация УПП на пути №1) и выдача на ПДУ подсказки о неготовности. СДУ-Д>ПДУ: индикация на ПДУ разрешения движения. ПДУ>СДУ-Д: подтверждение на начало движения. СДУ-Д>УСО: автоматическое включение светового указателя, разрешающего движение с секции ПО 101 на УПП. СДУ-Д>ПДУ: индикация замыкания контактов датчиков положения при движении ЭПС на УПП.
Подтверждение парковки ЭПС на УПП. СДУ-Д: автоматическое включение красного светофора СК1701 при фиксации ЭПС над датчиками ДП1701 и ДП1702. ПДУ>СДУ-Д: подтверждение парковки ЭПС. ПДУ>СДУ-Д: продублировать включение светофора СК1701 (в случае отказа ДП). СДУ-Д>УСО: автоматическое выключение светового указателя СЗ0101. СДУ-Д>УСО: автоматическое закрытие ворот В01.
Разворот УПП на путь №3. ДПД>ШАВ-17: отключить 600В с секции пути П1701. СДУ-Д>ПДУ: индикация на ПДУ отключения 600В. ПДУ>СДУ-Д: Команда СУ УПП “Разворот: Путь 3”. СДУ-Д>ПДУ: проверка условий начала разворота: отсутствие 600В на пути П1701. Выдача на ПДУ подсказки о неготовности. СДУ-Д>ПДУ: команда на разворот принята СУ УПП. Индикация направления вращения “1>3”. СДУ-Д>ПДУ: донесение СУ УПП “Готово: путь 3”.
Движение ЭПС на путь П0301. ДПД>ШАВ-17: подать 600В полной мощности на УПП. ДПД>ШАВ-3: подать 600В полной мощности на путь П0301. СДУ-Д>ПДУ: индикация на ПДУ включения 600В. ПДУ>СДУ-Д: команда СДУ-Д "Движение: путь 17>путь 3". СДУ-Д>ПДУ: проверка условий начала движения (занятость Пути 3/1, наличие 600В на путях 17 и 3/1) и выдача на ПДУ подсказки о неготовности. СДУ-Д>УСО: автоматическое выключение светофора СК1701. Автоматическое включение светового указателя С31701, разрешающего движение задним ходом на путь 3. СДУ-Д>ПДУ: индикация на ПДУ включения светофора. ПДУ>СДУ-Д: подтверждение начала движения.
Подтверждение выезда ЭПС из депо. ПДУ>СДУ-Д: прием ЭПС завершен. СДУ-Д>УСО: автоматическое выключение светового указателя СЗ1701. СДУ-Д>АРМ-ДД: сообщение “Маневр завершен”.
В случае невозможности выполнить технологическую операцию или необходимости ее отмены дежурный по депо может нажать на ПДУ кнопку "Отмена" и отправить сообщение на АРМ-ДД об отмене операции.
Далее приводится алгоритм вывода ЭПС из депо.
Вывод ЭПС из депо на трассу ММТС осуществляется в соответствии с текущим суточным графиком или, в случае необходимости, по команде ДД при непосредственном участии ДПД. В процессе подготовки ЭПС к выводу из депо оператор ЭПС осуществляет тестирование ЭПС и его внешний осмотр, после чего докладывает по диспетчерской связи ДД о готовности ЭПС к выходу на трассу. Если при тестировании обнаруживаются неисправности, препятствующие эксплуатации ЭПС, ДД помечает его на мнемосхеме, как неисправный.
Процедура вывода ЭПС из депо начинается с операции сбора маршрута. Сбор маршрута осуществляется ДПД по команде с АРМ ДД или по текущему суточному графику с помощью ПДУ. Как при выполнении процедуры “Прием ЭПС”, ДПД может использовать режим работы “диспетчерский” или “автономный”. В диспетчерском режиме на ПДУ ДПД от АРМ ДД выдается номер исходного пути, с которого должен быть выведен ЭПС.
Маршрут движения рассчитывается автоматически и отображается на экране ПДУ в виде мнемосхемы. Для привлечения внимания дежурного при приеме маршрута подается звуковой сигнал. В автономном режиме ДПД с помощью меню ПДУ задает путь, с которого должен выводиться ЭПС. Для этого вначале выбирается меню “МАНЕВР”, затем в открывшемся окне “ВЫВОД ЭПС” и, наконец, исходный путь “путь 8/2”.
Дальнейшие действия ДПД в процессе вывода ЭПС из депо аналогичны действиям ДПД при приеме ЭПС в депо и поясняются экранными формами. Исходные данные: Путь УПП (П0701), Путь ЭПС (П0802).
Выбор пути отправления. АРМ-ДД>СДУ-Д: выбор маршрута движения; задача= “Вывод ЭПС”; путь А=П0802 (исходный путь); путь В=П0901 (путь назначения); время исполнения=“6:40”. СДУ-Д>ПДУ: прием и отображение маршрута движения: Путь 8/2>Путь 9” и запуск таймера отсчета времени исполнения. ПДУ>СДУ-Д: подтверждение маршрута (или отмена *). СДУ-Д>АРМ-ДД: вывод сообщения: “Маршрут движения принят” или “Отмена выбранного маршрута.
Подготовка вывода ЭПС из депо. ПДУ>СДУ-Д: команда СУ УПП “Разворот: путь 8”. СДУ-Д>ПДУ: проверка условий начала разворота: отсутствие 600В на пути №17 и пути установки УПП. Выдача на ПДУ подсказки о неготовности. СДУ-Д>ПДУ: команда на разворот принята СУ УПП. Индикация направления вращения “9>8”. ДПД>ШАВ-82: подать 600В пониженной мощности на секцию пути отправления ЭПС (путь №8.2). ДПД>О-ЭПС: подготовка ЭПС к движению. Диагностика систем ЭПС. СДУ-Д>ПДУ: донесение СУ УПП “Готово: путь 8”. О-ЭПС>ДПД: системы ЭПС в норме, готов к движению.
Движение ЭПС на УПП. ДПД>ШАВ-82: подать 600В полной мощности на секцию П0802. ДПД>ШАВ-81: подать 600В полной мощности на секцию П0801. ДПД>ШАВ-17: подать 600В полной мощности на УПП. СДУ-Д>ПДУ: индикация на ПДУ включения 600В. ПДУ>СДУ-Д: команда СДУ-Д “Движение: путь 8/2>путь 17”. СДУ-Д>ПДУ: проверка условий начала движения (занятость секций на пути движения, наличия 600В и фиксации УПП на пути №8) и выдача на ПДУ подсказки о неготовности. СДУ-Д>ПДУ: индикация на ПДУ разрешения движения. ДПД>СДУ-Д: подтвердить оператору ЭПС начало движения. СДУ-Д>УСО: автоматическое включение световых указателей СЗ0803, СЗ0801, разрешающих сквозное движение с секции П0802 через секцию П0801 на УПП. СДУ-Д>ПДУ: индикация замыкания контактов датчиков положения при движении ЭПС на УПП.
Подтверждение парковки ЭПС на УПП. СДУ-Д>УСО: автоматическое включение красного светофора СК1701 при фиксации ЭПС над датчиками ДП1701 и ДП1702. ДПД>СД-У: подтверждение парковки ЭПС. ПДУ>СДУ-Д: продублировать включение светофора СК1701 (в случае отказа ДП). СДУ-Д>УСО: автоматическое выключение световых указателей СЗ0801, СЗ0803.
Разворот УПП на путь №9. ДПД>ШАВ-81: отключить 600В с секции пути П0801. ДПД>ШАВ-82: отключить 600В с секции пути П0802. ДПД>ШАВ-17: отключить 600В с секции пути П1701. СДУ-Д>ПДУ: индикация на ПДУ отключения 600В. ПДУ>СДУ-Д: команда СУ УПП “Разворот: Путь 9”. СДУ-Д>ПДУ: проверка условий начала разворота: отсутствие 600В на путях П0801, П0802 и П1701. Выдача на ПДУ подсказки о неготовности. СДУ-Д>ПДУ: команда на разворот принята СУ УПП. Индикация вращения УПП. СДУ-Д>ПДУ: донесение СУ УПП “Готово: путь 9”.
Движение ЭПС на площадку №1. ДПД>ШАВ-17: подать 600В полной мощности на УПП. СДУ-Д>ПДУ: индикация на ПДУ включения 600В. ПДУ>СДУ-Д: команда СДУ-Д “Движение: путь 17>путь 9”. СДУ-Д: автоматическое открытие ворот В09. СДУ-Д>ПДУ: проверка условий начала движения (занятость пути №9, наличие 600В на пути №17 и №9, ворота В09 открыты) и выдача подсказки о неготовности на ПДУ. СДУ-Д: Автоматическое выключение светофора СК1701. Автоматическое включение светового указателя С31702, разрешающего движение вперед. СДУ-Д>ПДУ: индикация на ПДУ включения светофора. ДПД>СДУ-Д: подтверждение начала движения.
Подтверждение выезда ЭПС из депо.
ПДУ>СДУ-Д: выезд завершен. СДУ-Д: автоматическое закрытие ворот В09. Автоматическое выключение светового указателя С31702. СДУ-Д>АРМ-ДД: сообщение “Маневр завершена.
В случае невозможности выполнить технологическую операцию дежурный по депо может нажать на ПДУ кнопку “Отмена” и отправить сообщение на АРМ-ДД об отмене операции.
Алгоритм перестановки ЭПС в депо.
Процедура перестановки ЭПС в депо по своей сути является вариантом процедур “Прием ЭПС в депо” или “Вывод ЭПС из депо” и отличается от них тем, что исходная точка маршрута и точка назначения находятся внутри депо. Поэтому алгоритм процедуры “Перестановка ЭПС в депо” содержит первую часть алгоритма процедуры “Вывод ЭПС из депо” и вторую часть алгоритма процедуры “Прием ЭПС в депо”. Точкой раздела является въезд и выезд ЭПС с УПП. Учитывая схожесть этого алгоритма с уже рассмотренными, его описание здесь не приводится.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ | 2003 |
|
RU2228278C1 |
| СПОСОБЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И ЕЕ ПЕРЕГОНУ | 2002 |
|
RU2196695C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ НАВЕСНОГО ТИПА И МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НАВЕСНОГО ТИПА | 2000 |
|
RU2160678C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2008 |
|
RU2388637C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2009 |
|
RU2422316C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
Группа изобретений относится к железнодорожной автоматике и предназначена для использования при осуществлении маневровых передвижений электроподвижных составов (ЭПС) со специфическими требованиями, прикладываемыми к монорельсовой транспортной системе (МТС). Предполагается, что электродепо МТС состоит из внешних и внутренних парковочных путей для ЭПС соответственно перед въездными и выездными воротами и внутри депо, а также трансбордера. Система управления содержит цифровой вычислительный комплекс, соединенный линиями связи с распределенными вне и внутри депо стационарными и мобильными объектами управления, снабженными абонентскими устройствами, и также имеет распределенную вдоль парковочных путей приемопередающую антенну, выполненную в виде радиоизлучающего кабеля, а также датчики состояния стационарных и мобильных объектов управления, стационарные и мобильные устройства формирования управляющих сигналов и систему определения положения ЭПС. Стационарные объекты управления сгруппированы в устройство отображения мнемонической схемы депо, привод звонка громкого боя, приводы ворот и трансбордера, светофоры. Мобильные объекты управления сгруппированы в ЭПС, находящиеся соответственно на парковочных путях вне и внутри депо, а также на трансбордере. Стационарные устройства формирования управляющих сигналов сгруппированы в автоматизированные рабочие места со стационарными пультами управления, а мобильные устройства формирования управляющих сигналов - в носимые пульты дистанционного управления дежурного по депо и кабины управления ЭПС. При этом стационарные объекты управления, датчики состояния, расположенные на них, автоматизированные рабочие места и система определения положения ЭПС соединены с вычислительным комплексом проводными и/или беспроводными линиями связи посредством блоков доступа, а мобильные объекты управления и датчики, расположенные на них, соединены с вычислительным комплексом беспроводными линиями связи посредством блоков доступа. Способ управления маневровыми работами в электродепо МТС включает три процедуры приема ЭПС в депо с трассы МТС, вывода ЭПС из депо на трассу МТС и перестановки ЭПС внутри депо. В процедурах участвуют диспетчер депо, дежурный по депо, оператор ЭПС. Группа изобретений повышает эффективность маневровых работ в электродепо МТС за счет оптимизации управления. 2 с. и 12 з.п. ф-лы, 3 ил.
| RU 2167403 C1, 20.05.2001 | |||
| US 6109568 А, 29.08.2000 | |||
| СПОСОБЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И ЕЕ ПЕРЕГОНУ | 2002 |
|
RU2196695C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

