Изобретение относится к радиосистемам обмена данными и может быть использовано для организации информационного обмена между воздушными объектами (ВО) и наземными комплексами (НК) в каналах «воздух-земля».
Известна система радиосвязи с подвижными объектами [1], которая состоит из наземной и бортовой приемопередающих радиостанций, между которыми в соответствии с заложенными алгоритмами осуществляется обмен данными. При обмене сообщениями между наземной приемопередающей станцией и подвижными воздушными объектами загрузка канала меняется в зависимости от этапа полета и информационной активности абонентов цифровой радиосвязи. Реализованный с помощью вычислителя автоматизированного рабочего места (АРМ) счетчик числа подвижных воздушных объектов контролирует количество объектов и выдает это число на счетчик загрузки системы. В зависимости от числа объектов и числа переспросов сообщений в системе используются динамические алгоритмы организации обмена сообщениями и управления каналами радиосвязи. Для предотвращения столкновений при одновременной передаче несколькими объектами сообщений осуществляется контроль несущей радиосигналов подвижных воздушных объектов во время воздействия ее на бортовой приемник. Определяется состояние, когда радиоканал свободен. Для разнесения во времени моментов выхода на связь нескольких подвижных воздушных объектов в бортовое устройство введен вычислитель, реализующий функции анализатора несущей частоты и генератора псевдослучайной задержки, которые обеспечивают соответствующую задержку передачи сообщений от подвижных воздушных объектов. Для принятия оптимального решения наземными службами и на борту информация об относительном местоположении аэропорта и подвижных воздушных объектов снимается с одного из бортовых и наземных датчиков - приемников сигналов глобальной навигационной спутниковой системы.
Персонал, размещаемый на НК, решает задачи с помощью комплексов программно-аппаратных средств, выполненных на вычислителях (ПЭВМ). Информационный обмен НК с ВО осуществляется по каналам «воздух-земля» в MB диапазоне. Радиосигналы MB диапазона распространяются в пределах прямой видимости. Антенны на ВО и НК - всенаправленные для удобства обеспечения связи при движении объектов.
При уменьшении высоты полета ВО ниже допустимой или нахождения ВО на угле места относительно НК менее 5° и при наличии помех в MB диапазоне качество передачи информации резко снижается, что может привести к аварийной ситуации. Оператор на НК в этом случае не контролирует местоположение ВО. Поэтому в условиях высокой динамики изменения воздушной обстановки возникают трудности управления воздушным движением.
К недостаткам представленной системы обмена сообщениями между бортовым радиоэлектронным оборудованием ВО и наземными службами, следует отнести недостаточную помехозащищенность канала MB диапазона.
Известна система радиосвязи с подвижными объектами [2], в которой принимаемые наземной радиостанцией из канала «воздух-земля» сообщения через аппаратуру передачи данных поступают в вычислитель автоматизированного рабочего места на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных воздушных объектов, хранящимися в памяти их бортовых вычислителей. При совпадении адреса подвижного воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ВО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения постоянной радиосвязи со всеми N ВО. При выходе за пределы радиогоризонта, хотя бы одного из ВО или приближении к границе зоны устойчивой радиосвязи, определяется программно один из ВО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ВО определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному подвижному воздушному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) воздушных объектов, может быть доставлено N-му ВО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ВО, назначенного ретранслятором, и адреса подвижных воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые на ВО сообщения анализируются в блоке анализа типа сообщений. После анализа решается вопрос о направлении данных по двунаправленной шине на систему управления объекта или ретрансляции их на соседний ВО. В обычном режиме с НК, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ВО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображается на мониторе АРМ. На ВО после прохождения через бортовые антенну, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного воздушного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется в каком режиме должна работать аппаратура ВО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных. Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу "воздух-земля" взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ВО и мониторе АРМ НК соответственно. Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ВО. Принятые на НК навигационные сообщения от всех ВО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
Недостаткам аналога являются:
- недостаточная помехозащищенность радиоканала MB диапазона;
- сигналы информационного обмена с ВО в каналах «воздух-земля» в MB диапазоне имеют ограниченную скорость передачи. В современных линиях передачи данных «воздух-земля» VDL-2 и VDL-4 скорость передачи составляет всего 31,5 и 19,2 кбит/с соответственно;
- для некоторых практических применений, например при передаче сигналов картографирования поверхности Земли, требуемая информационная скорость передачи информации должна составлять не менее 400 кбит/с. Радиолинию передачи данных с такой скоростью в соответствии с международными нормами можно организовать только в диапазоне сверхвысоких частот (СВЧ-диапазоне).
Наиболее близким по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [3], которая и принята за прототип. В этой системе во время движения подвижные воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом по узкополосной и широкополосной линиям передачи данных.
Наземный комплекс содержит наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных (АПД) к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места. Первый вход вычислителя АРМ подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. N подвижных воздушных объектов, в состав каждого из которых входят бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Выход бортового вычислителя подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления воздушным объектом. Бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного воздушного объекта, второго ВО и далее до N-го ВО, а передача данных с N-го ВО на НК осуществляется в обратном порядке. Установленные на воздушном объекте бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования необходимы для создания бортового комплекта широкополосной радиолинии передачи данных. Каждый из указанных выше узлов соединен двухсторонними связями с соответствующими входами/выходами бортового вычислителя. Бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями. Бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне. В наземном комплексе концентратор, подключенный через локально-вычислительные сети (ЛВС) двухсторонними связями к соответствующим входам/выходам наземной направленной антенны, наземному антенному коммутатору, наземной аппаратуре связи. Каждый из А АРМ состоит из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ. Каждый из В блоков сопряжения состоит из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, выход которого является входом/выходом системы. Наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи. Наземный блок горизонтирования подключен к наземной направленной антенне механическими связями. В режимах ретрансляции и обмена данными бортовая направленная антенна 1-го ВО соединена по эфиру с бортовой направленной антенной 2-го ВО и так далее до N-го ВО.
К недостаткам прототипа следует отнести низкую помехозащищенность в случае совпадения направления на источник помех с угловым положением главного луча диаграммы направленности приемной антенны.
Кроме того, ввиду динамически меняющейся воздушной обстановки подвижные объекты часто выходят за пределы зоны прямой видимости, тем самым, разрывая тракт ретрансляции сообщений, уменьшая надежность связи и увеличивая время доставки сообщения, так как необходимо дополнительное время для создания нового пути трансляции данных соответствующему абоненту. Поэтому в большинстве практических случаях широкополосная радиолиния связи наземного комплекса обслуживает только один подвижный объект, находящийся в зоне прямой (оптической) видимости.
Таким образом, основной технической задачей, на решение которой направлено заявляемое изобретение, является повышение помехозащищенности передачи информации, в том числе при совпадении направления на источник помех с направлением на воздушный объект и с угловым положением главного луча диаграммы направленности приемной антенны наземного комплекса.
Указанный технический результат достигается тем, что в систему радиосвязи с воздушными объектами, состоящую из наземного комплекса, содержащего А автоматизированных рабочих мест (АРМ), наземную антенну, наземную радиостанцию, подключенную двухсторонними связями через первую наземную аппаратуру передачи данных (АПД) к соответствующему первому входу/выходу вычислителя первого из А автоматизированных рабочих мест, второй вход/выход которого подключен к приемнику сигналов навигационных спутниковых систем, вход - к пульту управления первого АРМ, а выход - к монитору АРМ, концентратор, подключенный к локально-вычислительным сетям (ЛВС), которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной направленной антенны СВЧ-диапазона, наземному антенному коммутатору, наземной аппаратуре связи, наземному блоку горизонтирования, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ, каждому из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, выход которого является входом/выходом системы, наземная направленная антенна СВЧ-диапазона через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи, наземный блок горизонтирования подключен к наземной направленной антенне механическими связями, подвижного воздушного объекта, в состав которого входят бортовая аппаратура передачи данных, бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений, бортовая аппаратура связи, бортовой антенный коммутатор, каждый из которых соединен с соответствующими входами/выходами бортового вычислителя, выход которого подключен к входу блока регистрации данных, а отдельный его вход/выход - к двунаправленной шине системы управления воздушным объектом, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне, бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, первую бортовую антенну СВЧ-диапазона, эфир подключена к наземной направленной антенне СВЧ-диапазона, дополнительно введены на ВО - вторая бортовая антенна СВЧ-диапазона, подключенная также к входу/выходу бортового антенного коммутатора и через эфир - к наземной направленной антенне СВЧ-диапазона, бортовое кодирующе-декодирующее устройство, подключенное к соответствующему входу/выходу бортового вычислителя, а в НК - наземное кодирующе-декодирующее устройство, подключенное к соответствующему входу/выходу вычислителя первого АРМ.
На фиг.1 представлена система радиосвязи с воздушными объектами, где обозначено:
1 - наземный комплекс;
2 - воздушный объект;
3 - бортовой вычислитель;
4 - бортовые датчики;
5 - приемник сигналов навигационных спутниковых систем (бортовой);
6 - блок регистрации данных;
7 - бортовая аппаратура передачи данных;
8 - бортовая радиостанция;
9 - бортовая антенна;
10 - наземная антенна;
11 - наземная радиостанция;
12 - наземная аппаратура передачи данных;
13 - вычислитель АРМ;
14 - наземный приемник сигналов навигационных спутниковых систем;
15 - монитор АРМ;
16 - пульт управления АРМ;
17 - анализатор типа принимаемых сообщений;
18 - двунаправленная шина системы управления воздушным объектом;
19 - бортовое кодирующе-декодирующее устройство;
20 - наземное кодирующе-декодирующее устройство;
21 - бортовая аппаратура связи;
22 - бортовой антенный коммутатор;
23 - первая бортовая антенна СВЧ-диапазона;
24 - вторая бортовая антенна СВЧ-диапазона;
25 - наземная направленная антенна СВЧ диапазона;
26 - наземный блок горизонтирования;
27 - локально-вычислительные сети;
28 - наземный антенный коммутатор;
29 - наземная аппаратура связи;
30 - автоматизированное рабочее место;
31 - одна из В вторых наземных АПД блока 33 сопряжения;
32 - устройство сопряжения с каналом связи;
34 - вход/выход системы;
35 - концентратор.
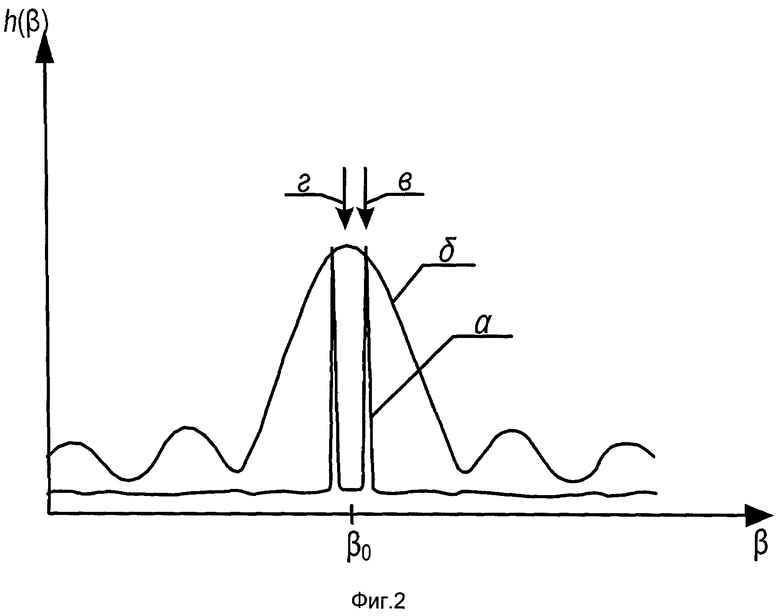
На фиг.2 представлен рисунок форм диаграмм направленности (в азимутальной плоскости) стандартной приемной антенны и виртуальной ДНА, ориентированной в направлении максимальной приходящей мощности сигнала, для пояснения эффекта выигрыша в отношении сигнал/помеха при использовании заявляемого объекта.
На фиг.2 введены обозначения:
h(β) - коэффициент усиления антенны;
а - виртуальная ДНА;
б - стандартная ДНА приемной антенны;
в - направление прихода радиосигнала;
г - направление прихода помехи.
Двойными сплошными линиями на фиг.1 обозначены механические связи. Вспомогательные элементы электропитания, контроля, записи и хранения информации и другие, не влияющие на выполнение цели изобретения, не включены в структурную схему системы.
Алгоритм работы системы заключается в повышении помехозащищенности системы за счет введения новых узлов, позволяющих обеспечить пространственно-временное кодирование широкополосной информации в условиях постоянно изменяющейся помеховой обстановки и независимо от взаимного положения НК 1 и ВО 2. Дополнительно помехозащищенность системы повышается за счет организации обмена данными между оборудованием воздушных объектов 2 и наземного комплекса 1 одновременно по двум радиоканалам: узкополосному (например, MB диапазона) и широкополосному (СВЧ-диапазона) радиоканалам связи.
Система радиосвязи с воздушными объектами работает следующим образом. При беспомеховой обстановке во время движения воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом 1 по узкополосному каналу связи, например в MB диапазоне. Принимаемые наземной радиостанцией 11 из канала «воздух-земля» сообщения через аппаратуру 12 передачи данных поступают в вычислитель 13 АРМ 30, построенный, например, на базе ПЭВМ серии «Багет». В вычислителе 13 АРМ 30 в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами воздушных объектов, хранящимися в памяти вычислителя 13 АРМ. При совпадении адреса воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ВО 2 и состоянии его датчиков выводится на экран монитора 15 АРМ НК 1. В вычислителе 13 АРМ 30 решаются следующие задачи: прием-передача сигналов со второй наземной АПД 31, прием данных о фактическом положении ДНА наземной направленной антенны 25 и состоянии наземной аппаратуры 29 связи; формирование хронизирующих сигналов для переключения режимов «передача-прием» наземного антенного коммутатора 28, сигналов управления: положением ДНА наземной направленной антенны 25 СВЧ-диапазона по азимуту и углу места, наземным блоком 26 горизонтирования, режимами работы ВО; прием и обработка сигналов контроля со всех радиоэлектронных узлов системы, сигналов с выхода наземного приемника 14 сигналов навигационных спутниковых систем, прием-передача данных через блок 33 сопряжения по шине 34 потребителям информации; формирование на экране монитора 15 АРМ 30 картинки в соответствии с принятой с ВО 2 информацией и вспомогательных сообщений в виде графических линий, символов и других изображений, отображение квитанций и донесений о режимах работы ВО 2, НК 1, АРМ 30; слежение за местоположением всех ВО 2 в зоне радиосвязи, обеспечение постоянной радиосвязи с ВО 2, оптимальное управление их движением, решение конфликтных ситуаций, преобразование входных/выходных сигналов наземного кодирующе-декодирующего устройства 20 к виду, необходимому для работы наземной аппаратуры 29 связи, и выполнение других операций.
Бортовой вычислитель 3 осуществляет формирование данных для передачи сигналов на НК 1, обработку принятых данных с НК 1 и о состоянии бортовой аппаратуры 21 связи; формирование хронизирующих сигналов для переключения режимов «передача-прием» бортового антенного коммутатора 22, прием и обработку сигналов контроля со всех радиоэлектронных узлов ВО с передачей результата обработки на НК 1, сигналов с выхода бортового приемника 5 сигналов навигационных спутниковых систем; прием-передачу данных по шине 18 соответствующим потребителям информации на борту и на земле, формирование на экране блока 6 регистрации данных картинки в соответствии с принятой с НК 1 информацией и вспомогательной информацией с узлов ВО 2 в виде графических линий, символов и других изображений; отображение команд управления с НК 1 режимами работы узлов ВО 2; слежение за местоположением НК 1 в зоне радиосвязи с формированием отметки от НК 1 на экране блока 6 регистрации данных, обеспечение постоянной надежной радиосвязи с НК 1, оптимальное управление движением собственного ВО 2; решение конфликтных ситуаций, преобразование входных/выходных сигналов бортового кодирующе-декодирующего устройства 19 к виду, необходимому для работы бортовой аппаратуры 21 связи, и выполнение других операций.
Эти операции выполняются программно с помощью дополнительных модулей, конструктивно встраиваемых в вычислители 3 и 13 АРМ или выполненных в виде отдельных узлов, входящих в «обрамление» указанных вычислителей. Все АРМ 30 для повышения аппаратной надежности системы идентичны по структуре и программному обеспечению. Пульт 16 управления АРМ, предназначенный для выполнения известных операций [1], может состоять, например, из клавиатуры и манипулятора графического. Число АРМ 30 определяется требуемой производительностью операторов (диспетчеров), числом потребителей информации и объемом потребляемой ими информации. Бортовой вычислитель 3 может состоять из нескольких процессоров, объединенных общей шиной. Все АРМ 30 соединены между собой и с другими блоками системы с помощью локально-вычислительных сетей 27. ЛВС 27 может состоять из нескольких интерфейсов со своими физическими линиями, например МКИО, Ethernet, RS-232 и других [8, 9].
В бортовой и наземной АПД (7 и 12) для повышения помехоустойчивости используется кодирование передаваемых данных, комбинированные методы модуляции, способы борьбы с замираниями в условиях многолучевого распространения радиоволн. Кодирование передаваемых данных может быть осуществлено, например, с помощью сверточного кодирования по Витерби с мягким решением и использованием модифицированной решающей обратной связи [6, 10]. Для борьбы с замираниями в условиях многолучевого распространения радиоволн может быть использован, например, широкополосный сигнал и прием разнесенных во времени сигналов по схеме «РЕЙК», в которой обеспечивается разделение и адаптивное весовое сложение сигналов в динамике профиля многолучевости [6, 10].
Для радиолинии связи СВЧ-диапазона в соответствии с рекомендациями Международной комиссии по радиочастотам могут быть выбраны, например, диапазоны (1710-1850) МГц, (7125-8500) МГц или другие, имеющие характерные окна радиопрозрачности атмосферы. Особенностью широкополосной радиолинии связи является то, что в наземной и бортовой аппаратуре связи 29 и 21 для повышения помехозащищенности используются методы пространственно-временного блокового кодирования, например, с помощью способа, предложенного Аламоути [4, 5]. При использовании этого способа предполагается одновременное излучение с двух антенн двух пар одинаковых радиосигналов в двух интервалах передачи таким образом, что при синфазном их сложении на приеме повысится помехозащищенность системы. В этом случае информационные биты сначала модулируются М-арным кодом. Затем бортовым кодирующее-декодирующим устройством 19 формируется блок из двух символов s1 и s2 в каждой операции кодирования, который затем модулируется в бортовой аппаратуре 21 связи и в форме радиосигналов посылается через бортовой антенный коммутатор 22 на две слабонаправленные передающие антенны 23 и 24 СВЧ-диапазона в соответствии с матрицей кодирования

В первом столбце матрицы (1) представлена последовательность, передаваемая в первом интервале передачи, во втором - во втором интервале передачи. Первый ряд формулы (1) соответствует символам, передаваемым с первой антенны, второй ряд - передаваемым со второй антенны. В течение первого символьного интервала, первая антенна передает сигнал s1 и вторая антенна передает сигнал s2. В течение второго символьного интервала первая антенна передает сигнал 

Коэффициенты передачи радиосигналов с первой и второй антенн 23 и 24 СВЧ-диапазона можно выразить через h1(t) и h2(t) соответственно. Если принять постоянство этих коэффициентов в течение двух интервалов передачи информационной последовательности символов, то получим
h1(t)=h1(t+T)=h1=|h1|ejθ 1,
h2(t)=h2(t+T)=h2=|h2|ejθ 2,
где |hi| и θi, i=1, 2 - амплитуда и фаза сигнала с i-й антенны передатчика бортовой аппаратуры 21 связи и T - длительность символа.
Для приема кодированного по Аламоути двухсимвольного сигнала в приемнике наземной аппаратуры связи 29 достаточно одной антенны и пары временных отсчетов сигнальной смеси [4]. После прохождения канала приемника и оцифровки сигнальной смеси в двух последовательных временных интервалах может быть получена совокупность напряжений
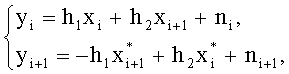
где ni и ni+1 - независимые комплексные переменные с нулевым значением и различаются лишь в том, что представляют собой аддитивный белый гауссовский шум в интервале времени {t, t+T} соответственно, xi и xi+1 - символы передаваемой последовательности, разделенной на пары, например на смежные - четный и нечетный [4].
Для оценки коэффициентов передачи радиосигналов с первой и второй бортовых антенн 23 и 24 СВЧ-диапазона h1(t) и h2(t) при составлении канала связи транслируются заранее известные пилот-сигналы, например преамбула. Затем по этим данным в приемнике наземной аппаратуры 29 связи вычисляются коэффициенты передачи h1(t) и h2(t) на интервале времени {t, t+T} и осуществляется декодирование пары передаваемых символов, например, по критерию максимального правдоподобия.
Если местоположение источников сигнала и помех разнесено в пространстве, то повысить помехозащищенность системы можно, разделив их на основе пространственной селекции по разным углам прихода на приемную направленную антенну 25 СВЧ-диапазона. При поступлении сигналов и помех на направленную антенну 25 СВЧ-диапазона с разных угловых направлений, различающихся более чем на ширину главного луча диаграммы направленности антенны, их можно разделить обычной пространственной селекцией. Например, при наличии в НК 1 приемной направленной антенны 25 СВЧ-диапазона с узкой ДНА (1-6)° [10] можно сформировать главный луч диаграммы направленности антенны, сориентировать его в направлении максимальной приходящей мощности сигнала и минимизировать коэффициент усиления антенны в направлении на источник помех. В некоторых случаях при работе в условиях холмистой (гористой) местности для увеличения углового разноса трасс прохождения сигналов и помехи можно искусственно ориентировать диаграмм направленности передающих антенн ВО 2 не в направлении приемника, а в сторону мощного переотражателя (горы, холма и других крупных объектов).
При различии в направлениях приема сигнала и помехи, не превышающем ширины главного луча приемной диаграммы направленности антенны (ДНА) направленной антенны 25 СВЧ-диапазона НК 1, а остальные их параметры совпадают, передаваемые радиосигналы с ВО 2 могут быть разделены на основе методов углового «сверхразрешения» по процедуре Кейпона [4, 5, 11]. Рассмотрим этот метод на примере двухвибраторной антенны. Если угловые координаты излучателей (βm) ВО 2 относительно нормали к приемной направленной антенне 25 СВЧ-диапазона НК 1 известны, например, по точным данным о текущем местоположении ВО 2, полученных с помощью обработки сигналов приемника глобальных навигационных спутниковых систем, то задача разделения сигналов, излученных парой вибраторов, сводится к решению системы уравнений, составленных по одному отсчету аналогово-цифрового преобразователя (АЦП)

где y1, y2 - выходные напряжения приемных антенн; x1, х2 - неизвестные комплексные амплитуды излученных сигналов, h1(βm), h2(βm) - известные формы диаграмм направленности приемных антенных элементов в направлениях источников излучения [4].
Неизвестные угловые координаты источников излучения βm определяются на этапе вхождения в связь при цифровом формировании диаграмм направленности приемных антенных элементов. Для этого можно применять нелинейные математические операции, например процедуру Кейпона [4, 5]. На фиг.2 поясняется эффект сверхразрешения сигнала (фиг.2в) и помехи (фиг.2г), принимаемых практически в главном луче результирующей диаграммы направленности антенны 25 СВЧ-диапазона НК 1 (фиг.2б). В результате проведения операций по методу Кейпона диаграммы направленности подобных приемных антенн (фиг.2а), которые являются виртуальными функциями, будут крайне узконаправленными и остроконечными, что позволяет повысить пространственную избирательность направленной антенны 25 СВЧ-диапазона по сравнению с классической обработкой посредством преобразования Фурье [4, 5]. Характерно, что передавать радиосигналы в данном случае может антенна с широкой (слабонаправленной) диаграммой направленности. Это особенно важно, поскольку при нелинейной обработке сигналов принцип взаимности не выполняется и воспроизвести столь же узконаправленные диаграммы направленности диаграммы направленности для передающей антенны невозможно. С помощью фиг.2 можно представить выигрыш предлагаемой системы в отношении сигнал/помеха, например, как отношение площадей, заключенных внутри кривых, ограниченных классической (фиг.2б) и виртуальной (фиг.2а) ДНА. При организации радиолинии связи, например, в сантиметровом диапазоне для использования предложенной технологии на ВО 2 можно создать большой разнос антенных элементов - до 10 длин волн [4, 5]. Это обеспечивает лучшую декорреляцию сигналов в режиме передачи на НК 1. Алгоритм сверхразрешения по методу Кейпона при обработке сигналов в антенной решетке с неидентичными каналами приведен в работе [11].
Операции формирования и обработки передаваемых и принимаемых сигналов, например, по алгоритму Аламоути осуществляются в устройствах 19 и 20 соответственно. Процедуры борьбы с замираниями радиосигнала из-за эффекта отражения от Земли и «формирования» виртуальной сверхузкой ДНА, например, по методу Кейпона, производятся программно в наземной аппаратуре связи 29. Аппаратура связи 21 и 29 состоит, например, из радиостанции СВЧ-диапазона и соответствующей вычислительной аппаратуры обработки и передачи данных. В радиостанции для создания широкополосного сигнала может быть использован, например, метод непосредственной модуляции сигнала промежуточной частоты фазоманипулированной последовательностью. В некоторых вариантах может быть использована псевдослучайная перестройка несущей частоты.
В качестве антенны 25 могут быть использованы, например, активные фазированные антенные решетки или параболические антенны с электромеханическим управлением положением ДНА. Сектор сканирования луча ДНА антенны 25 может быть, например, по азимуту 360°, по углу места - практически от 0 до 180° (без учета углов закрытия и особенностей связи при углах места вблизи 90°). Управление положением ДНА выполняется, например, программно с помощью вычислителя 13 АРМ и дополнительных модулей, конструктивно встраиваемых в вычислитель 13 АРМ или выполненных в виде отдельных узлов, входящих в его «обрамление». Сохранение положения центра ДНА в направлении на выбранный объект системы при маневрах ВО 2 или НК 1 обеспечивается с помощью блока горизонтирования 26, управляемого с помощью данных с вычислителя 13 АРМ. Наведение ДНА осуществляется путем нахождения пространственного вектора между двумя объектами системы и направления по нему центра ДНА направленной антенны 25 СВЧ-диапазона. Для этого с учетом тенденции (экстраполяции) движения с привязкой к единому всемирному времени используются точные координаты ВО 2 и НК 1, вычисляемые по выходным сигналам приемников 5 и 14 навигационных спутниковых систем, например ГЛОНАСС/GPS [7]. На ВО 2 может быть установлена пассивная антенна с круговой ДНА по азимуту и с небольшой направленностью по углу места с коэффициентом усиления (3-10) дБ, что необходимо при полете ВО 2 по замкнутому маршруту. Для защиты антенн 23, 24 и 25 от внешних воздействий могут быть использованы, например, радиопрозрачные укрытия, не показанные на фигуре. Для варианта использования на НК 1 параболических антенн с электромеханическим управлением положением ДНА под радиопрозрачным укрытием размещают устройства сканирования наземной направленной антенны 25 СВЧ-диапазона по азимуту и углу места и соответствующие датчики, входящие в состав наземного блока 26 горизонтирования, антенный коммутатор 28 и для уменьшения потерь радиосигнала в антенно-фидерном тракте наземную аппаратуру 29 связи.
Информация блоков 12, 14, 20 обрабатывается в вычислителе 13 одного из АРМ, например первого. Полученные по ЛВС 27 данные распределяются между остальными вычислителями 13 АРМ 30 и, при необходимости, передаются через одну из В вторых наземных АПД 31 блока 33 сопряжения и устройство 32 сопряжения с каналом связи блока сопряжения 33 по шине 34 соответствующему потребителю информации. Сообщения от потребителя информации на вычислители 13 АРМ 30 передаются через те же узлы, но в обратном порядке. В зависимости от объема требуемой информации для обработки и формирования сообщений потребителю могут быть использованы несколько АРМ 30. Обмен данными по ЛВС 27 организуется известными способами с помощью концентратора 35, который может быть выполнен, например, в виде оконечного устройства для интерфейса МКИО [8, 9].
Узлы 7, 8, 9, составляющие основу бортового комплекса связи MB диапазона, и узлы 10, 11, 12, составляющие основу наземного комплекса связи MB диапазона, для повышения надежности связи могут зарезервированы. Тогда один из входов/выходов бортового вычислителя 3 должен быть подключен ко второй цепочке, состоящей из последовательно соединенных узлов 7, 8, 9, а на НК 1 один из входов/выходов наземного вычислителя 13 любого из АРМ 30 также должен быть подключен к соответствующей второй цепочке, состоящей из последовательно соединенных узлов 12, 11, 10. В этом случае в наземном вычислителе 13 одного из АРМ, определенного ведущим, осуществляются операции оценки достоверности информации, принимаемой с ВО 2 по двум MB каналам, и обработки наиболее ценной, достоверной информации.
Принятые данные обрабатываются в блоке 17 анализа типа сообщений воздушного объекта 2. Если сообщение предназначено для данного ВО 2, то после анализа решается вопрос о направлении данных на блок 6 регистрации или по двунаправленной шине 18 на систему управления ВО, не указанную на фигуре.
Для последовательного выполнения операций по организации широкополосной радиолинии связи в заданный момент времени определяется текущее местоположение ВО 2 и НК 1, вычисляются в наземном вычислителе 13 экстраполяционные точки нахождения соответствующих объектов системы во время планируемого сеанса связи, осуществляется наведение центра диаграмм направленности антенны 25 СВЧ-диапазона НК 1 на ВО 2 и слежение за ним во время движения. Затем проводят обмен данными между соответствующими объектами системы.
При совпадении направления с НК 1 на ВО 2 с направлением на источник помех, положение которого определено в наземном вычислителе 13 АРМ по результатам оценки достоверности принятой информации с ВО 2 с помощью, например, процедуры Кейпона, указанными ранее процедурами обеспечивается заданная помехозащищенность.
После получения на НК 1 подтверждения о достоверном приеме информации на ВО 2 в вычислителе 13 АРМ 30 автоматически формируется следующее сообщение в адрес управляемого ВО 2. Это сообщение, пройдя по той же рассмотренной ранее цепочке, но только в обратном порядке, поступает на соответствующий бортовой вычислитель 3 и, при необходимости, отображается на экране бортового блока 6 регистрации данных.
Для удобства разрешения оператором НК 1 конфликтной ситуации при наличии помеховой обстановки на экран каждого монитора 15 АРМ 30 НК 1 может выводиться положение каждого ВО 2 относительно НК 1. Для этого, программно с помощью вычислителя 13 АРМ выделяются части пространства, в которых помеховая ситуация в вероятностном смысле менее напряженная, и сообщается об этом на ВО 2. Для отображения тенденции движения ВО 2 на экране монитора 15 АРМ вычислителем 13 АРМ 30 формируются отметки, характеризующие предыдущее местоположение ВО 2 и экстраполяционные отметки, характеризующие местоположение ВО 2 через заданный интервал времени. По мере движения ВО 2 устаревающие отметки стираются. Положение трассы полета ВО 2 в зоне обслуживания НК 1 сохраняется в памяти вычислителя 13 АРМ на заданный период времени.
При передаче с НК 1 приоритетных сообщений для ВО 2 в соответствии с категориями срочности, принятыми в системе радиосвязи с воздушными объектами, в заголовке кодограммы формируется код запрета передачи других данных на время, отводимое для трансляции данных с НК 1 на ВО 2 с учетом времени реакции ВО 2 на принятое сообщение и времени задержки в трактах обработки дискретных сигналов. Принимаемая на ВО 2 информация отображается на экране бортового блока 6 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов.
Остальные менее приоритетные сообщения в соответствии с протоколом обмена находятся в очереди соответствующей категории срочности. В вычислителях 3 и 13 определяется время «старения» информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно «стирается» и посылается запрос на повторную передачу сообщения.
В обычном режиме в беспомеховой обстановке с НК 1, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ВО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) с любого из пультов 16 управления АРМ 30 сообщение отображается на мониторе 15 АРМ и параллельно на НК 1 после прохождения сигнала через вычислитель 13 АРМ 30, аппаратуру передачи данных 12, радиостанцию 11, антенну 10 и на ВО 2 - через бортовые: антенну 9, радиостанцию 8, аппаратуру передачи данных 7 поступает в бортовой вычислитель 3, где происходит идентификация принятого в сообщении адреса с собственным адресом ВО 2. Если адреса совпадают, то сообщение передается в анализатор 17 типа ретранслируемого сообщения для дешифрации служебной части полученного сообщения и определения режима работы аппаратуры ВО 2. Информационная часть сообщения записывается в память бортового вычислителя 3 и при необходимости выводится на экран блока 6 регистрации данных, который может быть выполнен в виде монитора или другого устройства отображения.
В зависимости от числа воздушных объектов и числа переспросов сообщений в канале радиосвязи в системе используются динамические алгоритмы обмена сообщениями и эффективного управления полетом ВО 2. При изменении помеховой обстановки, взаимного положения НК 1 и ВО 2, нарушения режима полета воздушного объекта и других параметров в вычислителях 3 и 13 автоматически формируется предупреждающий сигнал о возможном «обрыве» связи, информация о котором выводится на экраны блока 6 регистрации данных и монитора 15 АРМ. Визуальная картинка может быть усилена звуковым эффектом.
В режиме адресного опроса инициатором связи может быть только НК 1. Если ВО 2 сформировал для передачи сообщение и обнаружил, что радиоканал свободен, то он информирует по радиолиниям MB и СВЧ-диапазона о начале цикла передачи данных, в том числе о своем местоположении, и случайным образом в выделенных ему временных слотах распределяет передаваемые сообщения. На ВО 2 в вычислителе 3 оценивается уровень принимаемого сигнала несущей частоты в радиоканале и обрабатываются для выбора интервалов передачи точные по времени импульсы синхронизации с выхода приемников глобальных навигационных систем. При совпадении расчетного интервала передачи с установленной очередностью воздушный объект 2 начинает передачу собственного пакета данных в выделенном интервале времени.
Устройства 20 и 19 могут быть выполнены в виде отдельных узлов или программными методами с помощью вычислителей 3 и 13.
Сообщения с выходов приемников 5 и 14 сигналов навигационных спутниковых систем, например ГЛОНАСС/GPS, записываются в память вычислителей 3 и 13 с привязкой к глобальному времени. В вычислителях 3 и 13 эти данные используются для расчета навигационных характеристик и параметров движения каждого ВО в зоне радиосвязи НК 1, а также для ориентирования в пространстве диаграммы направленности антенны 25 СВЧ-диапазона НК 1, в том числе при мобильном исполнении НК 1. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ВО 2 в вычислителе 3 формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ВО 2. Для повышения точности определения местоположения ВО 2 и, следовательно, установленных на нем антенн 23 и 24 с НК 1 постоянно передаются по MB и СВЧ радиолиниям дифференциальные поправки, позволяющие с помощью известных процедур вычислить координаты ВО 2 с точностью до 1 м [7]. Метки времени с выходов приемников 5 и 14 сигналов навигационных спутниковых систем используются в вычислителях 3 и 13 для согласованного формирования интервалов передачи и приема широкополосной информации, управляющих работой антенных коммутаторов 22 и 28 с учетом времени защиты сообщений от наложения. Обычно интервал передачи широкополосной информации в направлении на ВО 2 значительно меньше (более 8 раз), чем с ВО 2 на НК 1.
Принятые на наземном комплексе 1, представляющем собой наземный пункт приема, передачи, обработки и отображения информации, навигационные сообщения от ВО 2 обрабатываются в вычислителе 13 АРМ и выводятся на экран монитора 15 АРМ 30. Точка, характеризующая местоположение НК 1, обычно размещается в центре экрана монитора 15 АРМ 30. ВО 2, находящийся вблизи границы зоны устойчивой радиосвязи, выделяется, например, цветом отметки на экране монитора 15 АРМ.
В аппаратуре передачи данных 7 и 12 по радиолинии, например MB диапазона, осуществляются известные операции: модуляции и демодуляции, кодирования и декодирования и другие [5, 6].
На момент подачи заявки разработаны алгоритмы и программное обеспечение заявляемой системы радиосвязи. Узлы 1-18, 21-35 одинаковые с прототипом. Функции узлов 19-20 могут быть реализованы программно или на микросхемах WLANPlus MtW8150 и WLANPlus MtW8170 израильской фирмы Metalink Broadband [4]. Бортовые слабонаправленные антенны могут быть выполнены, например, в виде рупорных антенн. Вычислители 3 и 13 могут быть выполнены, например, на плате процессорной 5066-586-133MHz-1MB, 2 MB Flash CPU Card фирмы Octagon Systems и ЭВМ типа «Багет-01-07» ЮКСУ.466225.001 соответственно.
Использование заявляемой системы радиосвязи с воздушными объектами позволяет:
- повысить помехозащищенность передачи данных в условиях сложной помеховой обстановки, многолучевого распространения радиоволн и связанных с ним частотно-селективных замираний;
- обеспечить более высокую скорость передачи информации, благодаря организации широкополосной радиолинии связи СВЧ-диапазона;
- повысить уровень безопасности полетов за счет предоставления пилоту ВО и оператору НК информации о местоположении и параметрах движения воздушного объекта и о ситуации вокруг него с точностью глобальной навигационной спутниковой системы (для GPS - 7 м, в режиме передачи дифференциальных поправок - 1 м [7]).
Предлагаемая помехозащищенная система радиосвязи может быть использована при картографировании местности с помощью воздушного объекта (летательного аппарата) и трансляции цифровых данных в НК, который будет являться наземным пунктом приема и передачи информации.
ЛИТЕРАТУРА
1. Патент РФ №2195774.
2. Патент РФ №44907.
3. Патент РФ №2309543 (прототип).
4. Слюсар В.И. Системы MIMO: принципы построения и обработка сигналов. // Электроника: Наука, Технология, Бизнес. - 2005. - №8. - С.52-59.
5. Alamouti S.M. Space_time block coding: A simple transmitter diversity technique for wireless communications. // IEEE Journal on Selected Areas in Communications. - Oct. 1998. - Vol.16, - p.1451-1458.
6. Уильям К.Ли. Техника подвижных систем связи. - М.: Радио и связь, 1985, 391 с.
7. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
8. К.Э.Эрглис. Интерфейсы открытых систем. - М.: Горячая линия-Телеком, 2000. - 256 с.
9. А.А.Мячев. Интерфейсы средств вычислительной техники. Энциклопедический справочник. - М.: Радио и связь, 1993. - 350 с.
10. В.В.Бортников, С.С.Ананченков. Помехоустойчивость двоичных сигналов в марковском канале с замираниями. // Изв. вузов MB и ССО СССР, Радиотехника, 1984, т.24, №10, с.78-80.
11. О.С.Литвинов. Алгоритм сверхразрешения по методу Кейпона при обработке сигналов в антенной решетке с неидентичными каналами. // Антенны, 2004, №8-9 (87-88), с.72-79.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2642490C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544006C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2673680C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2530015C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518054C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2427078C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2692696C1 |
Изобретение относится к технике связи и может быть использовано для радиообмена данными. Технический результат состоит в повышении помехозащищенности информационного обмена между воздушными объектами и наземными комплексами в каналах «воздух-земля», в том числе при совпадении направления на источник помех с направлением на воздушный объект и с угловым положением главного луча диаграммы направленности приемной антенны наземного комплекса. Для этого в системе вводят процедуру пространственно-временного кодирования и способа формирования виртуальной диаграммы направленности наземной антенны по методу Кейпона. 2 ил.
Система радиосвязи с воздушными объектами, состоящая из наземного комплекса, содержащего А автоматизированных рабочих мест (АРМ), наземную антенну, наземную радиостанцию, подключенную двухсторонними связями через первую наземную аппаратуру передачи данных (АПД) к соответствующему первому входу/выходу вычислителя первого из А автоматизированных рабочих мест, предназначенного для приема, передачи данных и решения конфликтных ситуаций, второй вход/выход которого подключен к приемнику сигналов навигационных спутниковых систем, вход - к пульту управления первого АРМ, а выход - к монитору АРМ, концентратор, подключенный к локально-вычислительным сетям (ЛВС), которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной направленной антенны СВЧ диапазона, наземному антенному коммутатору, наземной аппаратуре связи, наземному блоку горизонтирования, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ, каждому из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, выход которого является входом/выходом системы, наземная направленная антенна СВЧ диапазона через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи, наземный блок горизонтирования подключен к наземной направленной антенне механическими связями, подвижного воздушного объекта, в состав которого входят бортовая аппаратура передачи данных, бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений, бортовая аппаратура связи, бортовой антенный коммутатор, каждый из которых соединен с соответствующими входами/выходами бортового вычислителя, предназначенного для формирования, приема, передачи данных и контроля состояния бортовой аппаратуры, выход которого подключен к входу блока регистрации данных, а отдельный его вход/выход - к двунаправленной шине системы управления воздушным объектом, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне, бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, первую бортовую антенну СВЧ диапазона, эфир подключена к наземной направленной антенне СВЧ диапазона, отличающаяся тем, что в нее введены дополнительно на ВО - вторая бортовая антенна СВЧ диапазона, подключенная также к входу/выходу бортового антенного коммутатора и через эфир - к наземной направленной антенне СВЧ диапазона, бортовое кодирующе-декодирующее устройство, подключенное к соответствующему входу/выходу бортового вычислителя, а в НК - наземное кодирующе-декодирующее устройство, подключенное к соответствующему входу/выходу вычислителя первого АРМ.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Щетка | 1934 |
|
SU44907A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2001 |
|
RU2195774C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 20080316947 A1, 25.12.2008 | |||
| Трехфазная полюсопереключаемая обмотка двухскоростного двигателя | 1983 |
|
SU1130966A1 |

