Изобретение относится к радиосредствам обмена данными и может быть использовано для высокоскоростного информационного обмена между подвижными объектами (ПО) и наземными комплексами (НК) в каналах «воздух-земля».
В настоящее время за рубежом широко применяется система обмена сообщениями между бортовым радиоэлектронным оборудованием подвижных воздушных объектов (самолетов) и наземными службами (ACARS) [1]. В системе обеспечивается вызов на речевую связь и передача данных между подвижными воздушными объектами и наземными службами. Бортовой блок связи в этой системе представляет собой вычислитель. Основным каналом обмена текущей информации является канал метрового (MB) диапазона. Организацию обмена информацией между наземными службами и бортовыми системами осуществляет наземный комплекс. Он опрашивает подвижные объекты, находящиеся в зоне его обслуживания, собирает с них необходимую информацию и отображает ее на экране монитора рабочего места оператора. Бортовая система работает в этом случае в режиме адресного опроса. Для того чтобы бортовая система могла работать в режиме адресного опроса, ей необходимо встать на обслуживание в наземной системе в режиме прямого доступа [2].
К недостаткам данной системы обмена сообщениями между бортовым радиоэлектронным оборудованием ПО и наземными службами является то, что в ней не предусмотрены процедуры обмена данными между НК и ПО при отсутствии экипажа.
Известна система радиосвязи с подвижными объектами [3], которая состоит из наземной и бортовой приемопередающих радиостанций, между которыми в соответствии с заложенными алгоритмами осуществляется обмен данными. В этой системе во время движения подвижные воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом. Принимаемые наземной радиостанцией из канала "воздух-земля" сообщения через аппаратуру передачи данных поступают в вычислитель автоматизированного рабочего места (АРМ) на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных воздушных объектов, хранящимися в памяти их бортовых вычислителей. При совпадении адреса подвижного воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения подвижных воздушных объектов и состоянии их многочисленных датчиков выводится на один экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения постоянной радиосвязи со всеми N ВО. При выходе за пределы радиогоризонта, хотя бы одного из ВО или приближении к границе зоны устойчивой радиосвязи, определяется программно один из ПО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ПО определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному подвижному воздушному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) подвижных объектов, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ПО, назначенного ретранслятором, и адреса подвижных воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые на ПО сообщения анализируются в блоке анализа типа сообщений. После анализа решается вопрос о направлении данных по двунаправленной шине на систему управления объекта или ретрансляции их на соседний ПО.
В обычном режиме с НК, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение также отображается на экране монитора АРМ. На ПО после прохождения через бортовые антенну МВ-ДМВ диапазонов, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного воздушного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется в каком режиме должна работать аппаратура ПО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу "воздух-земля" взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ПО и мониторе АРМ НК соответственно. Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
Однако аналогу присущи следующие недостатки, связанны с тем, что на НК отсутствуют сведения о состоянии бортовых систем и не предусмотрены процедуры обмена данными между НК и ПО при отсутствии экипажа.
Известен аналог - «Система радиосвязи с подвижными объектами» [4]. Система состоит из наземного комплекса, содержащего наземную антенну МВ-ДМВ диапазонов, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных (АПД) к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ). Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Концентратор подключен к локально-вычислительным сетям (ЛВС), которые в свою очередь соединены двухсторонними связями с соответствующими входами/выходами наземной направленной антенны, наземному антенному коммутатору, наземной аппаратуре связи, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ. Каждый из В блоков сопряжения состоит из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, выход которого является входом/выходом системы. Наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи. Наземный блок горизонтирования подключен к наземной направленной антенне механическими связями. В вычислителе АРМ в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами воздушных объектов, хранящимися в памяти вычислителя АРМ. При совпадении адреса воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков, в том числе датчика с высокоскоростной информацией, выводится на экран монитора АРМ НК. В вычислителе АРМ решаются следующие задачи: прием-передача сигналов со второй наземной АПД, прием данных о фактическом положении диаграммы направленности наземной направленной антенны и состоянии наземной аппаратуры связи, формирование хронизирующих сигналов для переключения режимов «передача-прием» антенного коммутатора, сигналов управления: положением диаграммы направленности антенны (ДНА) наземной направленной антенны по азимуту и углу места, наземным блоком горизонтирования, режимами работы ПО, прием, обработка и вывод на экран монитора АРМ сигналов контроля со всех радиоэлектронных узлов системы, сигналов с выхода наземного приемника сигналов навигационных спутниковых систем, прием-передача данных через блок сопряжения по шине потребителям информации; формирование на экране монитора АРМ картинки в соответствии с принятой с ПО информацией и вспомогательной информацией в виде графических линий, символов и других изображений; отображение квитанций и донесений о режимах работы ПО, НК, АРМ, слежение за местоположением всех ПО в зоне радиосвязи; обеспечение постоянной радиосвязи со всеми N ПО, оптимальное управление их движением; решение конфликтных ситуаций и выполнение других операций. Для удобства разрешения оператором НК конфликтной ситуации при наличии помеховой обстановки на экран каждого монитора АРМ НК может выводиться положение каждого ПО относительно НК. Для этого, программно, с помощью вычислителя АРМ выделяются части пространства, в которых помеховая ситуация в вероятностном смысле менее напряженная, и через находящиеся там ПО осуществляется трафик. Для отображения тенденции движения каждого ПО на экране монитора АРМ вычислителем АРМ формируются отметки, характеризующие предыдущее местоположение ПО и экстраполяционные отметки, характеризующие местоположение ПО через заданный интервал времени. По мере движения ПО устаревающие отметки стираются. Точка, характеризующая местоположение НК 1, обычно размещается в центре экрана монитора АРМ. ПО, находящиеся вблизи зоны устойчивой радиосвязи, выделяются от остальных, например, цветом отметки на экране монитора АРМ, и для них в вычислителях начинается решение задачи выбора оптимального пути трансляции управляющих сообщений от НК на выбранный ПО.
Набираемое оператором (диспетчером) сообщение для ПО и принятые данные отображаются на экране монитора АРМ. Принятые на НК навигационные сообщения от всех ПО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
В состав каждого из N подвижных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Выход бортового вычислителя подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным воздушным объектом. Бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне МВ-ДМВ диапазонов. Бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования соединены двухсторонними связями с соответствующими входами/выходами бортового вычислителя. Бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного воздушного объекта, второго ПО и далее до N-го ПО, а передача данных с N-гo ПО на НК осуществляется в обратном порядке. Бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне. В режимах ретрансляции и обмена данными бортовая направленная антенна 1-го ПО соединена по эфиру с бортовой направленной антенной 2-го ПО и так далее до N-гo ПО.
Аналогу присущи недостатки, заключающиеся в том, что отсутствует трансляция данных контроля оборудования ПО на мониторы НК.
Наиболее близким по назначению и большинству существенных признаков является "Система радиосвязи с подвижными объектами" [5], которая и принята за прототип. Она состоит из наземного комплекса (НК), содержащего наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ). Первый вход АРМ подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к первому монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Концентратор подключен к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной направленной антенны, наземного антенного коммутатора, наземной аппаратуры связи, каждому из А АРМ. Автоматизированное рабочее место состоит из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ. Каждый из В блоков сопряжения состоит из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи. Вход/выход канала связи является входом/выходом системы. Наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи. Наземный блок горизонтирования подключен к наземной направленной антенне механическими связями. В режимах ретрансляции и обмена данными бортовая направленная антенна 1-го подвижного. объекта (ПО) соединена по эфиру с бортовой направленной антенной 2-го ПО и так далее до N-гo ПО. В состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Выход бортового вычислителя подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным объектом. Бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования соединены двухсторонними связями с соответствующими входами/выходами бортового вычислителя. Бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями. Бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне. Бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного объекта, второго ПО и далее до N-гo ПО, а передача данных с N-гo ПО на НК осуществляется в обратном порядке. Распределитель данных в НК подключен двухсторонними связями к локально-вычислительным сетям. Второй монитор, соединен с соответствующим выходом вычислителя АРМ.
Прототипу присущи недостатки:
- бортовое оборудование ПО рассчитано на обслуживание экипажем, так как в нем имеется блок регистрации данных и отсутствует автоматическая система контроля параметров и процедура объединения, обработка и передача на НК данных контроля бортового оборудования;
- для управления бортовой направленной антенной используются громоздкие электромеханические узлы из-за чего затруднена оперативная трансляция на НК данных по каналу СВЧ диапазона при смене позиции НК;
- при потере сигналов управления из-за помех затруднено возвращение ПО в точку начала маршрута.
Таким образом, основной технической задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей, а именно, организация одновременного управления и контроля несколькими беспилотными объектами, автоматическая передача с них широкополосной информации, упрощение бортового оборудования, использование интеллектуальной наземной фазированной антенной решетки с быстрым электронным сканированием по азимуту и углу места в секторах нахождения обслуживаемых ПО, выполнение подвижным объектом операций в соответствии с заложенным планом движения и связи, упрощение процедуры привода ПО в точку начала маршрута или в заданный район даже при наличии помех.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, состоящую из наземного комплекса (НК), содержащего наземную антенну МВ-ДМВ диапазонов, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, третий вход - к наземному формирователю типа ретранслируемых сообщений, а выход - к первому монитору АРМ, первый концентратор, подключенный к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной аппаратуры связи, к каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом первого монитора АРМ, к каждому из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, вход/выход которого является входом/выходом системы, в состав каждого из N подвижных объектов входят бортовые датчики, бортовой приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, бортовая аппаратура связи соединена двухсторонними связями с соответствующими входами/выходами бортового вычислителя, бортовая аппаратура связи подключена к бортовой слабо направленной антенне СВЧ диапазона, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне МВ-ДМВ диапазонов, бортовые и наземные антенны связаны между собой радиоканалами МВ-ДМВ диапазонов на НК дополнительно введены блок формирования диаграмм направленности наземной приемной фазированной антенной решетки (ФАР) СВЧ диапазона, распределитель данных и второй концентратор, каждый из которых соединен двухсторонними связями с локально-вычислительными сетями, блок формирования диаграмм направленности подключен двухсторонними связями к наземной приемной ФАР СВЧ диапазона, которая в свою очередь подключена -двухсторонними связями к наземной аппаратуре связи и шине второго концентратора, а в каждый из А АРМ введен второй монитор АРМ, соединенный с соответствующим выходом вычислителя АРМ, на каждом подвижном объекте дополнительно введены блок формирования обратного маршрута с входом планирования и бортовой блок автоматической встроенной системы контроля, подключенные двухсторонними связями к соответствующим входам/выходам бортового вычислителя, в режимах обмена данными бортовая аппаратура связи СВЧ диапазона каждого подвижного объекта через бортовую слабо направленную антенну СВЧ диапазона соединена по эфиру с наземной приемной фазированной антенной решеткой СВЧ диапазона.
из наземного комплекса (НК), содержащего наземную антенну МВ-ДМВ диапазонов, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к первому монитору АРМ, формирователь типа ретранслируемых сообщений, соединенный с соответствующим входом вычислителя АРМ, концентратор, подключенный к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной аппаратуры связи, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ, каждого из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, распределитель данных, подключен двухсторонними связями к локально-вычислительным сетям, второй монитор АРМ соединен с соответствующим выходом вычислителя АРМ, вход/выход которого является входом/выходом системы, в состав каждого из N подвижных объектов (ПО) входят бортовые датчики, а также приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, бортовая аппаратура связи соединена двухсторонними связями с соответствующими входами/выходами бортового вычислителя, бортовая аппаратура связи подключена к бортовой слабо направленной антенне СВЧ диапазона, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных, радиостанцию подключен к бортовой антенне MB-ДМВ диапазонов, ведены в НК - блок формирования диаграмм направленности приемной наземной фазированной антенной решетки СВЧ диапазона, подключенный двухсторонними связями к локальным вычислительным сетям и приемной наземной фазированной антенной решетке СВЧ диапазона соответственно, на подвижном объекте - бортовые датчики подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя, блок формирования обратного маршрута с входом планирования и блок автоматической встроенной системы контроля, подключенные двухсторонними связями к соответствующим входам/выходам бортового вычислителя, в режимах обмена данными бортовая аппаратура связи каждого подвижного объекта через бортовую слабо направленную антенну СВЧ диапазона соединена по эфиру с наземной приемной фазированной антенной решеткой СВЧ диапазона
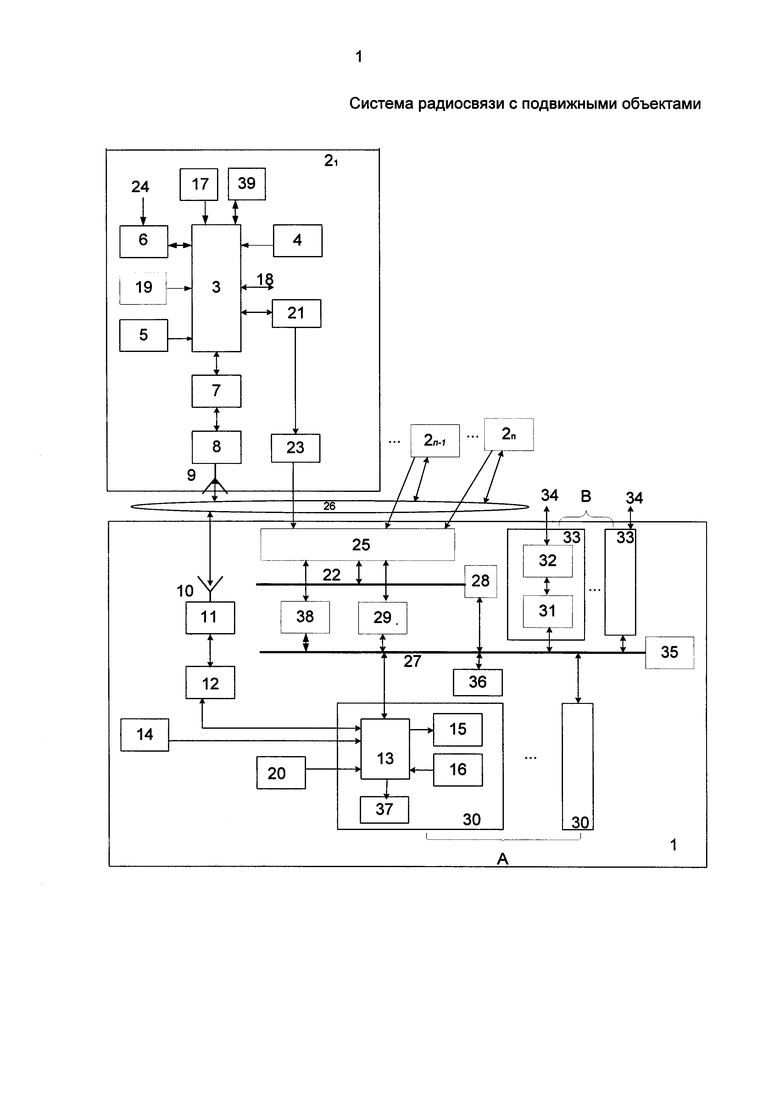
На чертеже представлена система радиосвязи с подвижными объектами, где обозначено:
1 - наземный комплекс;
2 - подвижный объект;
3 - бортовой вычислитель;
4 - бортовые датчики, в том числе управляемые с НК 1;
5 - бортовой приемник сигналов глобальных навигационных спутниковых систем с антенной;
6 - блок формирования обратного маршрута с входом планирования 24;
7 - бортовая аппаратура передачи данных (АПД);
8 - бортовая радиостанция;
9 - бортовая антенна МВ-ДМВ диапазонов;
10 - наземная антенна МВ-ДМВ диапазонов;
11 - наземная радиостанция;
12 - наземная аппаратура передачи данных;
13 - вычислитель АРМ;
14 - наземный приемник сигналов глобальных навигационных спутниковых систем;
15 - первый монитор АРМ;
16 - пульт управления АРМ;
17 - анализатор типа принимаемых сообщений;
18 - двунаправленная шина системы управления подвижным объектом;
19 - бортовой формирователь типа ретранслируемых сообщений;
20 - наземный формирователь типа ретранслируемых сообщений;
21 - бортовая аппаратура связи;
22 - шина второго концентратора 28;
23 - бортовая слабо направленная антенна СВЧ диапазона;
25 - наземная приемная фазированная антенная решетка (ФАР) СВЧ диапазона;
26 - радиоканалы связи МВ-ДМВ диапазонов;
27 - локально-вычислительные сети;
29 - наземная аппаратура связи;
30 - автоматизированное рабочее место;
31 - одна из В вторых наземных АПД блока 33 сопряжения;
32 - устройство сопряжения с каналом связи;
34 - вход/выход системы;
35 - первый концентратор;
36 - распределитель данных;
37 - второй монитор АРМ;
38 - блок формирования диаграмм направленности наземной приемной фазированной антенной решетки СВЧ диапазона 25;
39 - бортовой блок автоматической встроенной системы контроля.
Вспомогательные элементы электропитания, контроля, записи и хранения информации и другие, не влияющие на выполнение цели изобретения, не включены в структурную схему системы.
Алгоритм работы системы заключается в ее адаптации к постоянно изменяющейся воздушной обстановке и взаимному положению всех N подвижных объектов 2 относительно НК 1, находящихся в зоне обслуживания операторами наземного комплекса 1. Эта задача решена путем организации обмена данными между оборудованием подвижных объектов 2 и наземного комплекса 1 одновременно по двум радиоканалам 26: узкополосному МВ-ДМВ диапазона и широкополосному - СВЧ диапазона, составленному из приемо-передающего оборудования (21 и 29), бортовой слабо направленной антенны 23 СВЧ диапазона и наземной приемной фазированной антенной решетки 25 СВЧ диапазона с управляемыми лучами (по количестве N обслуживаемых ПО 2) ее диаграммы направленности с помощью блока 38.
Контроль работоспособности и исполнения управляющих воздействий с НК 1 необслуживаемого бортового оборудования, в том числе и управляемых датчиков 4, осуществляется бортовым блоком 39 автоматической встроенной системы контроля, а наземного оборудования, в том числе ФАР 25, - вторым контроллером 28 с шиной 22. Данные о смене режимов работы бортового оборудования и полета ПО 2, изменении состояния его бортовых датчиков 4 и других процессов на борту, результаты текущего контроля и донесения об исполнении команд управления с ПО 2 передаются на НК 1 по каналам 26 МВ-ДМВ диапазона и отображаются на экране второго монитора 37.
Движение ПО 2 осуществляется в соответствии с полетным заданием, введенным через вход 24 в блок 6 формирования обратного маршрута. Даже в помеховых условиях при «потере» канала управления с НК 1 подвижный объект 2 продолжает полет по заданному маршруту и возвращается в точку начала маршрута (или в другой район), координаты которого также введены в блок 6 через вход 24.
Система радиосвязи с подвижными объектами работает следующим образом. При беспомеховой обстановке во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются командами управления и донесениями об их исполнении с наземным комплексом 1 по каналам 26 МВ-ДМВ диапазоне, а широкополосная информация с управляемых датчиков 4 ПО 2 передается по радиоканалу СВЧ диапазона. Принимаемые наземной радиостанцией 11 из каналов 26 "воздух-земля" сообщения через аппаратуру 12 передачи данных поступают в вычислитель 13 АРМ 30, построенный, например, на базе ПЭВМ серии «Багет». В вычислителе 13 АРМ 30 в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в памяти вычислителя 13 АРМ. В некоторых случаях НК 1 может обеспечивать обмен данными только с одним ПО 2. Тогда основная (высокоскоростная) информация выводится на экраны всех первых мониторов 15 АРМ. При совпадении адреса подвижного объекта 2 с хранящимся в списке адресом информация о местоположении, параметрах движения ПО 2i состоянии его датчиков и другие распределяются блоком 36 по соответствующим АРМ 30, а в них через вычислитель 13 АРМ - на первый или второй мониторы АРМ 15 или 37.
На экран первого монитора 15 выводятся только данные с управляемых датчиков 4 - источников информации, необходимые оператору НК 1 для осуществления качественной и своевременной обработки широкополосных (высокоскоростных) данных:
- с выбранного распределителем 36 данных ПО 2 на фоне электронной карты местности;
- курсор, привязанный к точным координатам электронной карты местности;
- граница зоны прямой (оптической) видимости между НК 1 и обслуживаемым ПО 2;
- местоположение обслуживаемого ПО 2 относительно НК 1 и тип работающего датчика высокоскоростной информации.
На экран второго монитора 37 выводятся данные, необходимые оператору для контроля параметров ПО 2 и НК 1:
- сигналы контроля работоспособности оборудования ПО 2 и НК 1;
- точные текущие координаты и параметры движения обслуживаемого ПО 2;
- состояние датчиков обслуживаемого ПО 2, характеризующих, например, остаток горючего;
- отметки на электронной карте местности, характеризующие предыдущее местоположение обслуживаемого ПО 2 и экстраполяционные отметки, характеризующие местоположение ПО 2 через заданный интервал времени;
- результаты оценки качества каналов связи обслуживаемого ПО 2 и наличие источника помех;
- сообщения (сигналы телеуправления), набираемые оператором (диспетчером) с пульта 16 управления АРМ, для обслуживаемого подвижного объекта 2, например, команда смены используемого бортового датчика 4 высокоскоростной информации (при их наличии на борту ПО в количестве нескольких штук) и другие.
Для одновременного отображения с нескольких датчиков 4 и данных контроля с блока 39 для второго монитора 37 АРМ может быть выбран, например, многоэкранный режим.
В вычислителе 13 АРМ 30 решаются следующие задачи: прием-передача сигналов со второй наземной АПД 31, прием данных через шину 22, второй контроллер 28, шину 27 о фактическом положении каждого луча диаграммы направленности наземной приемной ФАР 25 и состоянии бортового оборудования и датчиков 4, наземной аппаратуры 29 связи, формирование хронизирующих сигналов для формирования сигналов управления: положением лучей наземной приемной ФАР 25 по азимуту и углу места, управления режимами работы оборудования ПО 2 и соответствующих управляемых датчиков 4 - источников информации, например, картографической, прием и обработка сигналов контроля со всех радиоэлектронных узлов системы, с выхода наземного приемника 14 сигналов навигационных спутниковых систем, прием-передача данных через блок 33 сопряжения по шине 34 потребителям информации, формирование на экране мониторов 15 и 37 АРМ 30 картинок в соответствии с принятой с ПО 2 высокоскоростной информацией и вспомогательной информацией в виде графических линий, символов и других изображений, формирование сообщений для отображения на экране второго монитора 37 квитанций и донесений о режимах работы ПО 2, НК 1, АРМ 30, распределение данных с ПО 2 с помощью блока 36 по соответствующим АРМ 30 и мониторам 15 и 37, переключение с помощью блоков 16 и 36 режима работы второго монитора в режим работы первого монитора 15 при выходе последнего из строя, слежение за местоположением всех ПО 2 в зоне радиосвязи, обеспечение постоянной радиосвязи с работающими ПО 2, оптимальное управление их движением, решение конфликтных ситуаций и выполнение других операций.
Бортовой вычислитель 3 осуществляет: формирование и обработку сигналов при прием-передаче с наземного НК 1, прием, объединение и обработку данных о состоянии бортовой аппаратуры 21 связи, формирование хронизирующих сигналов для бортовой аппаратуры 21 связи, управление режимами работы оборудования ПО 2, прием объединение и обработку сигналов контроля со всех радиоэлектронных узлов ПО 2 с передачей результата обработки на НК 1, обработку меток точного времени и данных текущего местоположения, курса, скорости и других параметров ПО 2 (с привязкой их к точному времени измерений) с выхода бортового приемника 5 сигналов глобальных навигационных спутниковых систем, прием-передачу данных по шине 18 соответствующим потребителям информации, слежение относительно своего за местоположением НК 1 и всех ПО 2 в зоне радиосвязи, обеспечение постоянной радиосвязи с заданными НК 1 и подвижными объектами 2, оптимальное управление движением собственного ПО 2, решение конфликтных ситуаций и возвращение ПО 2 в заданную точку, выполнение других операций.
Эти операции выполняются программно и с помощью дополнительных модулей, конструктивно встраиваемых в вычислители 3 и 13 АРМ или выполненных в виде отдельных узлов, входящих в «обрамление» указанных вычислителей, и могут быть использованы в качестве резервных. Все АРМ 30 идентичны по структуре и программному обеспечению. Пульт 16 управления АРМ, предназначенный для выполнения известных операций [1, 5], может состоять, например, из клавиатуры и манипулятора графического. Число АРМ 30 определяется требуемой производительностью операторов (диспетчеров), числом ПО 2, потребителей информации и объемом обрабатываемой ими информации. Бортовой вычислитель 3 может состоять из нескольких процессоров, объединенных общей шиной. Все АРМ 30 соединены между собой и с другими блоками системы с помощью локально-вычислительных сетей 27. ЛВС 27 может состоять из нескольких интерфейсов со своими физическими линиями, например, МКИО, Ethernet, RS-232 и других [9, 10].
Для линии связи СВЧ диапазона в соответствии с рекомендациями Международной комиссии по радиочастотам могут быть выбраны, например, диапазоны LDRCL - (1710-1850) МГц, RCL - (7125-8500) МГц или другие, имеющие характерные окна радиопрозрачности атмосферы. Особенностью широкополосной радиолинии связи является то, что в наземной и бортовой аппаратуре связи 29 и 21 для повышения помехозащищенности могут использоваться, например, кодирование передаваемых данных, комбинированные методы модуляции, способы борьбы с замираниями в условиях многолучевого распространения радиоволн, а также наземная приемная ФАР 25 с узкими лучами ДНА (1-10)° [11].
Аппаратура связи 21 и 29 состоит, например, из приемников СВЧ диапазона (по числу ПО 2) и соответствующей аппаратуры обработки и передачи данных. Кодирование передаваемых данных может быть осуществлено, например, с помощью сверточного кодирования по алгоритму Витерби с мягким решением и использованием модифицированной решающей обратной связи [6, 7, 11]. Для борьбы с замираниями в условиях многолучевого распространения радиоволн может быть использован, например, широкополосный сигнал и прием разнесенных во времени сигналов по схеме «РЕЙК», в которой обеспечивается разделение и адаптивное весовое сложение сигналов в динамике профиля многолучевости [6, 7, 11]. В радиостанции для создания широкополосного сигнала может быть использован, например, метод непосредственной модуляции сигнала промежуточной частоты фазоманипулированной псевдослучайной последовательностью. В некоторых вариантах может быть использована псевдослучайная перестройка несущей частоты.
В качестве антенны 23 может быть применен доработанный полуволновый вибратор, а для антенны 25 могут быть использованы, например, активные приемные фазированные антенные решетки. Сектор сканирования луча ДНА ФАР 25 по азимуту 360°, по углу места - практически от 0 до 180° (без учета углов закрытия и особенностей связи при углах места вблизи 90°). Управление положением лучей ДНА ФАР 25 выполняется, например, программно с помощью вычислителя 13 и блоков 38, 28 с шиной 22, выполненных программно или в виде модулей, конструктивно встраиваемых в вычислитель 13 АРМ или выполненных в виде отдельных узлов, входящих в «обрамление» вычислителя. Сохранение положения центра луча ДНА ФАР 25 в направлении на выбранный объект системы при маневрах ПО 2 или НК 1 обеспечивается с помощью блока 38, управляемого с помощью данных с вычислителя 13. Наведение каждого луча ДНА ФАР 25 на соответствующий ПО 2 осуществляется путем нахождения пространственного вектора между двумя объектами системы и направления по нему центров лучей ДНА ФАР 25 НК 1. Для этого с учетом тенденции (экстраполяции) движения с привязкой к единому всемирному времени используются точные координаты ПО 2 и НК 1, вычисляемые по выходным сигналам приемников 5 и 14 глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS [8]. Слабо направленная бортовая антенна 23 может представлять собой, например, антенну с круговой ДНА по азимуту и с небольшой направленностью по углу места с коэффициентом усиления (3-10) дБ. Для защиты антенн 23 и 25 от внешних воздействий могут быть использованы, например, радиопрозрачные укрытия, не показанные на чертеже.
Информация блоков 12, 14, 20 обрабатывается в вычислителе 13 одного из АРМ, например, первого. Полученные по ЛВС 27 данные распределяются между остальными вычислителями 13 АРМ 30 и, при необходимости, передаются через одну из В вторых наземных АПД 31 блока 33 сопряжения и устройство 32 сопряжения с каналом связи блока сопряжения 33 по шине 34 соответствующему потребителю информации. Сообщения от потребителя информации на вычислители 13 АРМ 30 и 3 ПО 2 передаются через те же узлы, но в обратном порядке. В зависимости от объема требуемой информации для обработки и формирования сообщений потребителю могут быть использованы несколько АРМ 30. Обмен данными по ЛВС 27 организуется известными способами с помощью концентратора 35, который может быть выполнен, например, в виде оконечного устройства для интерфейса МКИО [9, 10].
При подходе ПО 2 к границе зоны устойчивой радиосвязи или радиогоризонта, программно с помощью вычислителей 13, 3 и других узлов системы осуществляется или увеличение высоты полета или уменьшение ширины луча ДНА ФАР 25. При приближении ПО 2 к НК 1 с помощью вычислителя 3 уменьшается мощность радиосигналов, поступающих с бортовой аппаратуры 21 связи на слабо направленную антенну 23 (адаптация по мощности).
Узлы 7, 8, 9, составляющие основу бортового комплекса связи МВ-ДМВ диапазона, и узлы 10, 11, 12, составляющие основу наземного комплекса связи МВ-ДМВ диапазона, для повышения надежности связи могут быть зарезервированы. Тогда один их входов/выходов бортового вычислителя 3 должен быть подключен ко второй цепочке, состоящей из последовательно соединенных узлов 7, 8, 9, а на НК 1 один из входов/выходов наземного вычислителя 13 любого из АРМ 30 также должен быть подключен к соответствующей второй цепочке, состоящей из последовательно соединенных узлов 12, 11, 10. В этом случае в наземном вычислителе 13 одного из АРМ, определенного ведущим, осуществляются операции оценки достоверности информации, принимаемой с ПО 2 по двум МВ-ДМВ каналам 26, выбора и обработки наиболее ценной, достоверной информации.
Сообщение от НК 1 по МВ-ДМВ каналам 26 через последовательную цепочку, состоящую из (N-1) подвижных объектов 2, может быть доставлено N-му ПО 2N. Для этого на НК 1 в формирователе 20 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладываются номер ПО 21, назначенного ретранслятором, и адреса подвижных объектов 2i обеспечивающих заданный трафик сообщения. Принятые данные обрабатываются в блоке 17 анализа типа сообщений подвижного объекта 2. Если сообщение предназначено для данного ПО 2, то после анализа решается вопрос о направлении данных на бортовой вычислитель 3 и затем или на управляемые датчики 4 или по двунаправленной шине 18 на систему управления ПО, не указанную на чертеже, или, при работе в режиме ретрансляции, о передаче данных на соседний ПО 2i. Для исключения коллизий минимизируется число разрядов в передаваемом сообщении, а ретрансляция данных осуществляется последовательно во времени.
Для управления лучами ДНА ФАР 25 в заданный момент времени определяется текущее местоположение всех ПО 2 и НК 1, вычисляются в наземном вычислителе 13 экстраполяционные точки нахождения соответствующих объектов системы во время планируемого сеанса связи, осуществляется наведение лучей диаграммы направленности ФАР 25 НК 1 на ПО 2 и слежение за ними во время движения'. Для этого с наземного вычислителя 13 НК 1, имеющего больший объем информации о воздушной ситуации в своей зоне ответственности по сравнению с бортовыми вычислителями 3 ПО 2, постоянно осуществляется обмен соответствующими сообщениями со всеми ПО 2.
Для удобства разрешения оператором НК 1 конфликтной ситуации при наличии помеховой обстановки на экран первого монитора 15 АРМ 30 НК 1 может выводиться положение обслуживаемого ПО 2 относительно НК 1. Для этого, программно, с помощью вычислителя 13 АРМ выделяются части пространства, в которых помеховая ситуация в вероятностном смысле менее напряженная, и с находящихся там ПО 2 обеспечивается прием в СВЧ диапазоне широкополосной информации. Для отображения тенденции движения каждого ПО 2 на экране второго монитора 37 АРМ вычислителем 13 АРМ 30 формируются отметки, характеризующие предыдущее местоположение ПО 2 и экстраполяционные отметки, характеризующие местоположение ПО 2 через заданный интервал времени. По мере движения ПО 2 устаревающие отметки стираются. Положение трассы полета всех ПО 2 в зоне обслуживания НК 1 сохраняются в памяти соответствующих вычислителей 13 АРМ на заданный период времени.
При передаче с НК 1 приоритетных сообщений для ПО 2 в соответствии с категориями срочности, принятыми в системе радиосвязи с подвижными объектами, в формирователе 20 типа ретранслируемых сообщений в заголовке сообщения формируется код запрета передачи других сообщений на время, отводимое для трансляции данных с НК 1 на выбранный ПО 2i, с учетом времени реакции ПО 2 на принятое сообщение и времени задержки в трактах обработки дискретных сигналов. Принимаемая на ПО 2i информация после обработки поступает на соответствующее оборудование.
Остальные менее приоритетные сообщения в соответствии с протоколом обмена находятся в очереди соответствующей категории срочности. В вычислителях 3 и 13 определяется время "старения" информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно "стирается" и посылается запрос на повторную передачу сообщения.
В обычном режиме в беспомеховой обстановке с НК 1, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ПО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) с любого из пультов 16 управления АРМ 30 сообщение отображается на экране второго монитора 37 АРМ и параллельно на НК 1 после прохождения сигнала через вычислитель 13 АРМ 30, аппаратуру передачи данных 12, радиостанцию 11, антенну МВ-ДМВ диапазонов 10 и на ПО 2 - через канал 26 МВ-ДМВ диапазона, бортовые: антенну МВ-ДМВ диапазонов 9, радиостанцию 8, первую аппаратуру передачи данных 7 поступает в бортовой вычислитель 3, где происходит идентификация принятого в сообщении адреса с собственным адресом ПО 2. Если адреса совпадают, то сообщение передается в блок 17 анализа типа ретранслируемого сообщения для дешифрации служебной части полученного сообщения и определения режима работы аппаратуры ПО 2. Информационная часть сообщения записывается в память бортового вычислителя 3.
В зависимости от числа подвижных объектов и числа переспросов сообщений в канале радиосвязи в системе используются динамические алгоритмы обмена сообщениями и эффективного управления полетом ПО 2. При изменении помеховой обстановки, взаимного положения НК 1 и ПО 2, нарушения режима полета подвижного объекта и других параметров в вычислителях 3 и 13 автоматически формируется предупреждающий сигнал о возможном «обрыве» связи, информация о котором выводится на экран второго монитора 37 АРМ. Визуальная картинка может быть усилена звуковым эффектом. При использовании определенного формата заголовка сообщения с выхода бортовых формирователей 19 типа ретранслируемых сообщений может быть использован режим свободного доступа со стороны других подвижных объектов 2 или режим выделения временного интервала для организации обмена данными с наземным комплексом 1.
В результате анализа состояния и загрузки каналов радиосвязи МВ-ДМВ и СВЧ диапазонов в вычислителе 13 АРМ 30 НК 1 и выбора лучшего из них определяется число столкновений сообщений в каналах связи, и, когда это число превышает предельно допустимое, система переходит в режим адресного опроса для упорядочения работы канала передачи данных "воздух-земля". Для того, чтобы избежать столкновений в радиоканале связи при одновременной передаче несколькими объектами, вычислителями 3 и 13 может осуществляться, например, контроль радиосигналов при воздействии на радиостанцию преамбулы или заголовка (служебной части сообщений). Подготовленное сообщение с ПО 2 передается только в том случае, когда радиоканал свободен. Для того, чтобы разнести во времени моменты выхода на связь подвижных объектов в то время, когда они обнаружили, что радиоканал занят, в вычислителях 3 и 13 может формироваться, например, псевдослучайная задержка передачи сообщений от подвижных объектов 2 и НК 1 - для каждого объекта своя.
В режиме адресного опроса инициатором связи может быть только НК 1. Если подвижные объекты 2 сформировали для передачи сообщения и обнаружили, что радиоканал свободен, то они информируют остальные подвижные объекты в МВ-ДМВ диапазоне о начале цикла передачи данных, в том числе о своем местоположении, и случайным образом в выделенных им временных слотах распределяют передаваемые сообщения. На каждом из ПО 2 в бортовом вычислителе 3 оценивается уровень принимаемого радиосигнала в МВ-ДМВ радиоканале и с использованием для выбора интервалов передачи точных по времени импульсов синхронизации с выхода приемников глобальных навигационных спутниковых систем. При совпадении расчетного интервала передачи с установленной очередностью подвижный объект 2 начинает передачу собственного пакета данных в выделенном интервале времени.
Сообщения о местоположении и параметрах движения ПО 2 и НК 1 (при необходимости) с выходов приемников 5 и 14 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS, записываются в память вычислителей 3 и 13 с привязкой к глобальному времени. В вычислителях 3 и 13 эти данные используются для расчета навигационных характеристик и параметров движения каждого ПО в зоне радиосвязи НК 1, а также для ориентирования в пространстве лучей диаграммы направленности ФАР 25 НК 1, в том числе при мобильном исполнении НК 1. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ПО 2 в вычислителе 3 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 2.
Принятые на НК 1 навигационные сообщения от всех ПО 2 обрабатываются в вычислителе 13 АРМ и распределителе 36 данных, затем выводятся на экран второго монитора 37 АРМ 30. Точка, характеризующая местоположение НК 1, размещается, например, в центре экрана первого монитора 15 АРМ 30. ПО 2, находящиеся вблизи границы зоны устойчивой радиосвязи, выделяются от остальных, например, цветом отметки на экране первого монитора 15 АРМ, и для них в вычислителях 3 и 13 начинается решение задачи выбора оптимального пути трансляции по каналам 26 управляющих сообщений от НК 1 на выбранный ПО 2. Для этого постоянно в вычислителе 13 одного или одновременно нескольких АРМ 30 для обслуживаемых ПО 2 известными методами [6, 7] оцениваются зоны устойчивой радиосвязи для НК 1 и всех ПО 2. Наличие приемника 14 сигналов глобальных навигационных спутниковых систем позволяет проводить управление ПО 2 и с мобильного НК 1. В аппаратуре передачи данных 7 и 12 осуществляются известные операции: модуляции и демодуляции, кодирования и декодирования и другие [6, 7].
Оборудование, реализующее функции узлов 6, 38, 39 может быть выполнено программно. На момент подачи заявки разработаны алгоритмы и программное обеспечение заявляемой системы радиосвязи.
Использование заявляемой системы радиосвязи с подвижными объектами позволяет:
- управлять одновременно с НК 1 N подвижными объектами и адаптивно управлять лучами (по количестве N обслуживаемых ПО 2) приемной наземной фазированной решетки 25 СВЧ диапазона с помощью блока 38, который совместно с вычислителем 13 обеспечивает адаптацию системы по пространству;
- обеспечивать контроль работоспособности и исполнения управляющих воздействий с НК 1 необслуживаемого бортового оборудования с помощью бортового блока 39 и наземного оборудования, в том числе ФАР 25 - с помощью второго контроллера 28. Данные о смене режимов работы бортового оборудования и полета ПО 2, изменении состояния его бортовых датчиков и других процессов, результаты текущего контроля и донесения об исполнении команд управления с ПО 2, пройдя определенные узлы системы, отображаются на экране второго монитора 37;
- программировать движение ПО 2 заранее в соответствии с полетным заданием, вводимым через вход 24 в блок 6, что позволяет даже в помеховых условиях при «потере» канала управления МВ-ДМВ диапазона с НК 1 ПО 2 продолжить полет по заданному маршруту и возвратиться в точку начала маршрута (или в другой требуемый район).
Источники информации
1. В.В. Бочкарев, Г.А. Крыжановский, Н.Н. Сухих. Автоматизированное управление движением авиационного транспорта. М.: - Транспорт, 1999. 319 с.
2. АС №1401626.
3. Патент РФ №195774.
4. Патент РФ №2309543.
5. Патент РФ №2518054 (прототип).
6. Радиосистемы передачи информации: Учеб. пособие для ВУЗов / И.М. Тепляков и др. Под ред. И.М. Теплякова. - М.: Радио и связь, 1982.
7. Уильям К.Ли. Техника подвижных систем связи. - М., Радио и связь, 1985, 391 с.
8. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
9. К.Э. Эрглис. Интерфейсы открытых систем. - М.: Горячая линия-Телеком, 2000. - 256 с.
10. А.А. Мячев. Интерфейсы средств вычислительной техники. Энциклопедический справочник. - М.: Радио и связь, 1993. - 350 с.
11. В.В. Бортников, С.С. Ананченков. Помехоустойчивость двоичных сигналов в марковском канале с замираниями. - Изв. вузов MB и ССО СССР, Радиотехника, 1984, т.24, №10, С. 78-80.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2692696C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2791262C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2530015C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544006C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518054C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2427078C1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2486675C1 |
Изобретение относится к радиосистемам обмена данными и может быть использовано для передачи данных с бортового датчика высокоскоростной информации беспилотного подвижного объекта (ПО) на наземный комплекс (НК). Технический результат состоит в расширении функциональных возможностей, а именно организации одновременного управления и контроля несколькими беспилотными объектами, автоматической передачи с них широкополосной информации, упрощении бортового оборудования, использовании интеллектуальной наземной фазированной антенной решетки с быстрым электронным сканированием по азимуту и углу места в тех секторах, где находятся обслуживаемые ПО, выполнении подвижным объектом операций в соответствии с заложенным планом движения и связи, упрощении процедуры приведения ПО в точку начала маршрута или в заданный район даже при наличии помех. Для этого в систему введены на НК блок формирования диаграмм направленности наземной приемной фазированной антенной решетки СВЧ диапазона, а на подвижном объекте блок формирования обратного маршрута с входом планирования и бортового блока автоматической встроенной системы контроля. 1 ил.
Система радиосвязи с подвижными объектами (ПО), состоящая из наземного комплекса (НК), содержащего наземную антенну МВ-ДМВ диапазонов, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, третий вход - к наземному формирователю типа ретранслируемых сообщений, а выход - к первому монитору АРМ, первый концентратор, подключенный к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной аппаратуры связи, к каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом первого монитора АРМ, к каждому из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, вход/выход которого является входом/выходом системы, в состав каждого из N подвижных объектов входят бортовые датчики, бортовой приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, бортовая аппаратура связи соединена двухсторонними связями с соответствующими входами/выходами бортового вычислителя, бортовая аппаратура связи подключена к бортовой слабо направленной антенне СВЧ диапазона, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне МВ-ДМВ диапазонов, бортовые и наземные антенны связаны между собой радиоканалами МВ-ДМВ диапазонов, отличающаяся тем, что на НК дополнительно введены блок формирования диаграмм направленности наземной приемной фазированной антенной решетки (ФАР) СВЧ диапазона, распределитель данных и второй концентратор, каждый из которых соединен двухсторонними связями с локально-вычислительными сетями, блок формирования диаграмм направленности подключен двухсторонними связями к наземной приемной ФАР СВЧ диапазона, которая в свою очередь подключена двухсторонними связями к наземной аппаратуре связи и шине второго концентратора, а в каждый из А АРМ введен второй монитор АРМ, соединенный с соответствующим выходом вычислителя- АРМ, на каждом подвижном объекте дополнительно введены блок формирования обратного маршрута с входом планирования и бортовой блок автоматической встроенной системы контроля, подключенные двухсторонними связями к соответствующим входам/выходам бортового вычислителя, в режимах обмена данными бортовая аппаратура связи СВЧ диапазона каждого подвижного объекта через бортовую слабо направленную антенну СВЧ диапазона соединена по эфиру с наземной приемной фазированной антенной решеткой СВЧ диапазона.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518054C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА СВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2312459C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

