ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта заявка основана и притязает на преимущество приоритета предварительной заявки на патент США №61/096754, поданной Янг-Хан Ченом и др. 12 сентября 2008 года, полное содержание которой включено в эту заявку в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ НАСТОЯЩЕЕ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в общем, к беспроводным системам связи, а более конкретно к технологиям переключения (коммутации) между беспроводными системами связи.
ПРЕДШЕСТУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Сеть подвижной беспроводной связи, например сотовая сеть связи, часто разделена на множество географически разделенных, но обычно перекрывающихся секций (зон). Каждая секция контролируется базовой станцией (BS) для связи с подвижными станциями (MS) в секции. Когда подвижная станция движется от одной секции к другой секции, а подвижная станция передается от одной базовой станции к другой базовой станции, базовыми станциями и подвижной станцией выполняется технологический процесс хэндовера (передачи). Поскольку базовые станции могут контролироваться разными сетевыми операторами, эти базовые станции могут использовать разные форматы обеспечения связи, например многостанционный доступ с временным разделением каналов (TDMA), множественный доступ с разделением частот (FDMA) или многостанционный доступ с кодовым разделением каналов (CDMA). Подвижные станции могут передаваться путем использования различных процедур, например, в которых хэндовер инициируется подвижной станцией и базовой станцией.
Для выполнения технологического процесса хэндовера были разработаны различные технологии. Например, в патенте США №6115608, выданном Дюрану и др. 5 сентября 2000 года (в 608 патенте), описан способ и аппарат межсистемного хэндовера. В патенте №6115608 подвижная станция знает все идентификационные коды базовых станций другой системы связи, с которой она должна взаимодействовать, и, таким образом, внутренне инициирует запросы переадресации вызова. Подвижная станция осуществляет текущий контроль сигналов форматов базовых станций, вовлеченных в поддержание таблицы принимаемых сигналов из соседних секций, идентификационные коды секций и качество сигнала во время поддерживания действующего вызова и дополнительно передает запрос хэндовера в канале управления в режиме действующего вызова. В качестве другого примера, в патенте США №7010300, выданном Джонсу и др. 7 марта 2000 года, описаны способ и система межсистемной переадресации вызова сеанса беспроводной связи. В патенте №7010300 подвижная станция использует один протокол для связи с одной системой доступа и использует второй протокол, который инкапсулирует первый протокол для связи со второй системой доступа. После того как подвижная станция регистрируется со второй системой доступа, продолжающийся сеанс связи передается ко второй системе доступа в соответствии со вторым протоколом через первый протокол (индикацию хэндовера/переключения) между подвижной станцией и первой системой доступа.
Однако эти стандартные технологии не адресуются к ситуации, в которой вновь разработанные усовершенствованные базовые станции совместно существуют с традиционными базовыми станциями. Может оказаться желательным для усовершенствованных базовых станций и подвижных станций достигать обратной совместимости для поддержания традиционных базовых станций. Кроме того, если усовершенствованные базовые станции и подвижные станции поддерживают традиционный режим работы в дополнении к усовершенствованному режиму работы для обеспечения традиционного поддержания, то может потребоваться процедура переключения системы для передачи сеанса действующей связи или доступной линии связи между усовершенствованной базовой станцией и усовершенствованной подвижной станцией из традиционного режима работы в усовершенствованный режим работы.
Способы и системы, совместимые с определенными элементами описываемых вариантов осуществления, адресуются к одной или более проблемам, описанным выше.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Пример в соответствии с настоящим описанием включает в себя способ функционирования базовой станции для беспроводной связи. Способ предусматривает обеспечение первой зоны и второй зоны для беспроводной связи; функционирование первой зоны, использующей первый режим работы; и функционирование второй зоны, использующей второй режим работы. Способ также предусматривает связь с подвижной станцией в первой зоне, использующей первый режим работы; и определение того, способна ли подвижная станция функционировать при использовании как первого режима работы, так и второго режима работы. Способ дополнительно предусматривает выполнение процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, если подвижная станция определена способной к функционированию при использовании как первого, так и второго режимов работы.
Другой пример в соответствии с настоящим описанием включает в себя способ функционирования подвижной станции, способной обеспечивать связь в первом режиме работы и втором режиме работы. Способ предусматривает функционирование в первом режиме работы для обеспечения связи с первой зоной базовой станции и установления линии связи с базовой станцией, использующей первый режим работы. Способ также предусматривает определение того, что базовая станция способна функционировать как в первом режиме работы, так и во втором режиме работы. Способ дополнительно предусматривает выполнение процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, и функционирование во втором режиме работы для обеспечения связи со второй зоной базовой станции.
Другой пример в соответствии с настоящим описание включает в себя способ функционирования коммуникационной сети для беспроводной связи. Этот способ предусматривает обеспечение первой базовой станции, способной к функционированию в первом режиме работы; обеспечение второй базовой станции, способной к обеспечению одной или более зон и к функционированию, по меньшей мере, во втором режиме работы; и обеспечение, по меньшей мере, одной подвижной станции, способной к функционированию в первом режиме работы и втором режиме работы. Способ также предусматривает обеспечение связи посредством подвижной станции с первой базовой станцией или второй базовой станцией и выполнение процедуры хэндовера для передачи подвижной станции между первой базовой станцией и второй базовой станцией.
Другой пример в соответствии с настоящим описанием включает в себя базовую станцию для беспроводной связи. Базовая станция включает в себя одну или более антенн и приемопередатчик, связанный с одной или более антенн для приема и передачи данных связи от подвижных станций и к подвижным станциям, соответственно. Базовая станция также включает в себя процессор. Процессор конфигурирован для обеспечения первой зоны и второй зоны для беспроводной связи; для функционирования первой зоны, использующей первый режим работы; и для функционирования второй зоны, использующей второй режим работы. Процессор также конфигурирован для обеспечения связи с подвижной станцией в первой зоне, использующей первый режим работы; и для определения того, способна ли подвижная станция к функционированию при использовании как первого режима работы, так и второго режима работы. Процессор дополнительно конфигурирован для выполнении процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, если подвижная станция определена способной к функционированию при использовании как первого режима работы, так и второго режима работы.
Другой пример в соответствии с настоящим описанием включает в себя подвижную станцию, способную к обеспечению связи в первом режиме работы и втором режиме работы. Подвижная станция включает в себя одну или более антенн и приемопередатчик, связанный и одной или более антеннами для приема и передачи данных связи от базовых станций и к базовым станциям, соответственно. Подвижная станция также включает в себя процессор. Процессор конфигурирован для функционирования первого режима работы для обеспечения связи с первой зоной базовой станции; и для установления линии связи базовой станцией, использующей первый режим работы. Процессор также конфигурирован для определения того, способна ли базовая станция к функционированию как в первом режиме работы, так и во втором режиме работы, и для выполнения процедуры коммутации зоны для переключения подвижной станции и первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, если базовая станция определена способной к функционированию при использовании как первого, так и второго режимов работы. Процессор дополнительно конфигурирован для функционирования второго режима работы для обеспечения связи со второй зоной базовой станции.
Другой пример в соответствии с настоящим описанием включает в себя подвижную станцию для беспроводной связи. Подвижная станция включает в себя одну или более антенн и приемопередатчик, связанный с одной или более антеннами для приема и передачи данных связи от базовых станций и к базовым станциям, соответственно. Подвижная станция также включает в себя процессор. Процессор конфигурирован для обеспечения первого режима работы для обеспечения связи с первой базовой станцией, способной к функционированию в первом режиме работы, и для обеспечения второго режима работы для обеспечения связи со второй базовой станцией, способной к функционированию в первом режиме работы в первой зоне и к функционированию во втором режиме работы во второй зоне. Процессор также конфигурирован для обеспечения связи с первой базовой станцией или второй базовой станцией и для выполнения процедуры хэндовера для передачи между первой базовой и второй базовой станцией.
Должно быть очевидным, что как вышеприведенное общее описание, так и следующее подробное описание приведены только в качестве примера и для объяснения, а не для ограничения настоящего изобретения, как заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
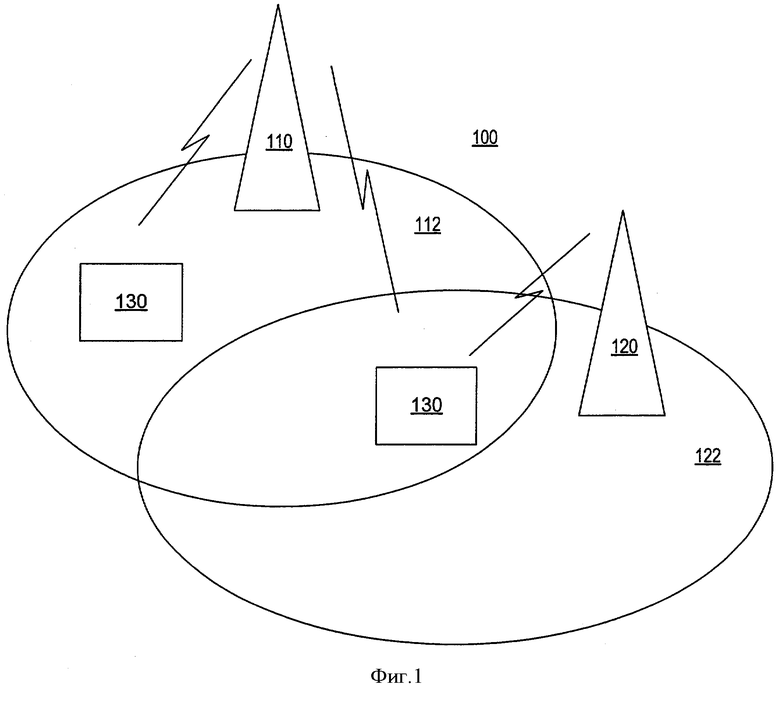
Фиг.1 - иллюстрация характерной среды связи, включающей в себя элементы, совместимые с описываемыми вариантами осуществления;
Фиг.2 - иллюстрация характерной базовой станции, обеспечивающей связь с подвижной станцией, совместимой с описываемыми вариантами осуществления;
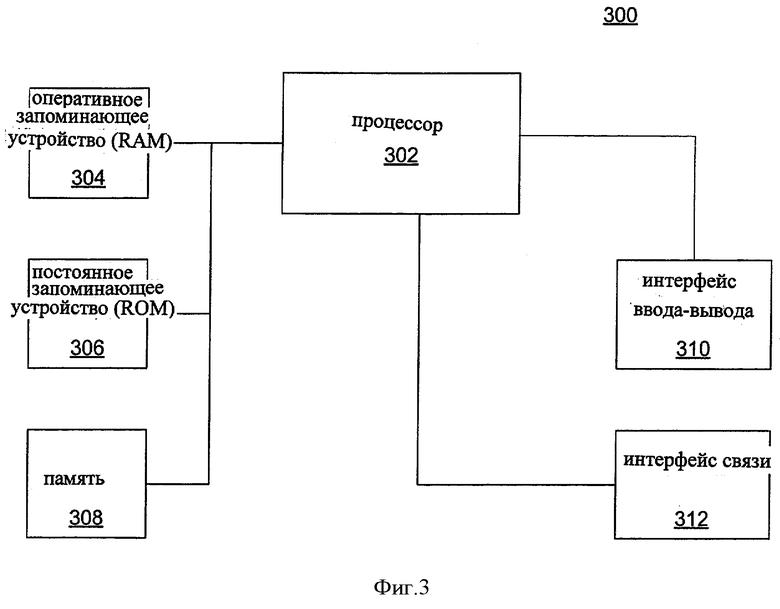
Фиг.3 - иллюстрация характерного контроллера, совместимого с описываемыми вариантами осуществления;
Фиг.4 - иллюстрация характерной подвижной станции, инициирующей технологический процесс коммутации зоны, совместимый с описываемыми вариантами осуществления;
Фиг.5 - иллюстрация другой характерной подвижной станции, инициирующей технологический процесс коммутации зоны, совместимый с описываемыми вариантами осуществления;
Фиг.6 - иллюстрация характерной базовой станции, инициирующей технологический процесс коммутации зоны, совместимый с описываемыми вариантами осуществления;
Фиг.7 - иллюстрация другой характерной базовой станции, инициирующей технологический процесс коммутации зоны, совместимый с описываемыми вариантами осуществления;
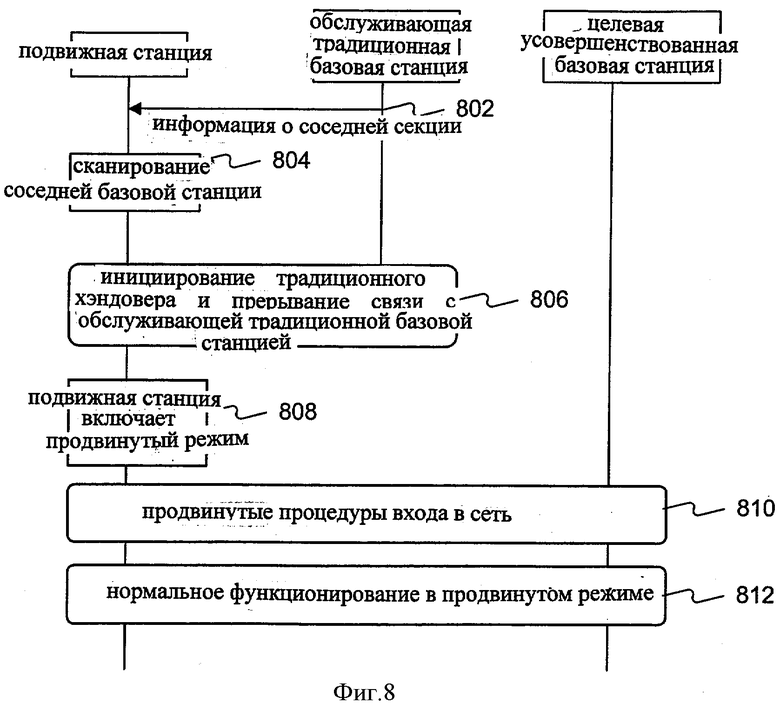
Фиг.8 - иллюстрация характерной одноступенчатой процедуры хэндовера от использующейся традиционной базовой станции к целевой (принимающей) усовершенствованной базовой станции, совместимой с описываемыми вариантами настоящего изобретения;
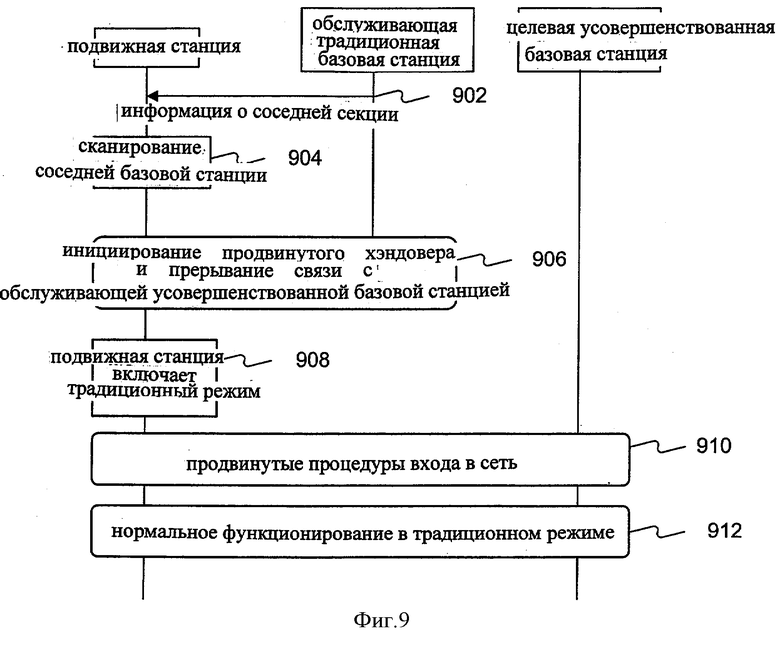
Фиг.9 - иллюстрация характерной одноступенчатой процедуры хэндовера от использующейся усовершенствованной базовой станции к целевой традиционной базовой станции, совместимой с описываемыми вариантами настоящего изобретения;
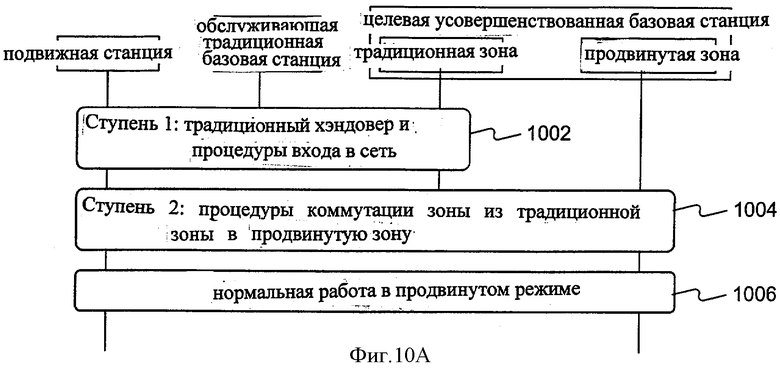
Фиг.10А - иллюстрация высокоуровневой характерной двухступенчатой процедуры хэндовера от использующейся традиционной базовой станции к целевой усовершенствованной базовой станции, совместимой с описываемыми вариантами настоящего изобретения;
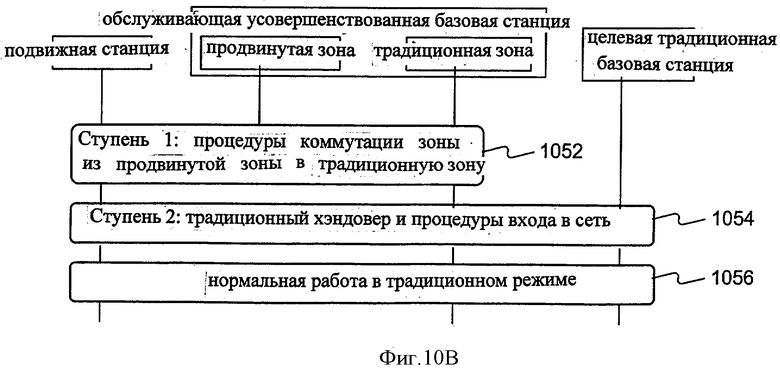
Фиг.10В - иллюстрация высокоуровневой характерной двухступенчатой процедуры хэндовера от использующейся усовершенствованной базовой станции к целевой традиционной базовой станции, совместимой с описываемыми вариантами настоящего изобретения;
Фиг.11 - подробная иллюстрация характерной двухступенчатой процедуры хэндовера от использующейся традиционной базовой станции к целевой усовершенствованной базовой станции, совместимой с описываемыми вариантами настоящего изобретения;
Фиг.12 - подробная иллюстрация характерной двухступенчатой процедуры хэндовера от использующейся традиционной базовой станции к целевой усовершенствованной базовой станции, совместимой с описываемыми вариантами настоящего изобретения; и
Фиг.13 - иллюстрация характерного технологического процесса, выполняемого подвижной станцией для целевого сетевого ввода, совместимого с описываемыми вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Далее будет делаться подробная ссылка на варианты осуществления настоящего изобретения, примеры которых иллюстрируются на сопроводительных чертежах. Где возможно, подобные ссылочные номера будут использованы на чертежах для ссылки на одинаковые или подобные детали.
На фиг.1 иллюстрируется характерная среда 100 связи, включающая в себя элементы, совместимые с вариантами осуществления настоящего изобретения. Как показано на фиг.1, среда 100 связи, например сеть беспроводной связи, использующая различные системы, например многостанционный доступ с кодовым разделением каналов (CDMA), широкополосный многостанционный доступ с кодовым разделением каналов (WCDMA), беспроводную локальную сеть (WLAN), всемирную возможность взаимодействия сетей для ультракоротковолнового доступа (WiMAX) и мультиплексирование с ортогональным частотным разделением сигналов (OFDM), может включать в себя базовую станцию 110, базовую станцию 120 и подвижную станцию 130. Это число базовых станций и подвижных станций является только примером и не является ограничением. Может быть использовано любое число базовых станций и подвижных станций и может быть добавлены другие устройства. Базовая станция 110 может контролировать секцию 112, а базовая станция 120 может контролировать секцию 122. Подвижная станция 130 может двигаться между местоположениями, контролируемыми разными базовыми станциями. Например, как показано на фиг.1, подвижная станция может двигаться от одного местоположения, контролируемого базовой станцией 110, к другому местоположению, контролируемому базовой станцией 120 и перекрываемому базовой станцией 110.
Кроме того, базовая станция 110 может быть усовершенствованной базовой станцией, а базовая станция 120 может быть традиционной базовой станцией. Однако могут также использоваться другие типы систем. Традиционная базовая станция, как используется в этом описании, может относиться к базовой станции, которая работает в традиционном режиме работы, соответствующем традиционным техническим требованиям. Традиционные технические требования используют относительно продвинутых технических требований. Традиционные технические требования могут относиться к техническим требованиям стандарта, например, IEEE 802.16, то есть, еще используемым, но устаревшим, благодаря другим техническим требованиям стандарта, обычно обеспечивающим увеличение скорости, ширины полосы пропускания и/или эффективности (то есть, продвинутым техническим требованиям). Усовершенствованная базовая станция может также поддерживать традиционный режим работы для обеспечения обратной совместимости с традиционной базовой станцией.
Например, базовая станция, соответствующая стандартам IEEE 802.16е, которые включены в IEEE 802.16Rev2, может рассматриваться как традиционная базовая станция;
тогда как базовая станция, соответствующая стандартам IEEE802,16m, может считаться усовершенствованной базовой станцией, которая может обеспечивать обратную совместимость со стандартами IEEE 802,16е. Однако могут также использоваться другие стандарты.
Усовершенствованная базовая станция 110 может включать в себя две или более разных зон, например традиционную зону и продвинутую зону. Зона, как используется в этом описании, может относиться к набору систем, аппаратных ресурсов и/или программных ресурсов, конфигурируемому базовой станцией для поддерживания конкретного режима работы в секции. Например, зона может включать в себя блок или сегмент временных и/или частотных ресурсов для конкретного режима работы. Таким образом, традиционная зона может означать длительность времени и/или полосу пропускаемых частот, которая предназначена для традиционной связи и операций, а продвинутая зона может означать длительность времени и/или полосу пропускаемых частот, которая предназначена для продвинутой связи и операций. Кроме того, зона может также включать в себя определенную зону обслуживания в секции. В зону могут быть включены любые соответствующие временные/пространственные/частотные ресурсы.
В работе базовая станция 110 может резервировать ресурсы для доступа с традиционным режимом работы для традиционной зоны и может также резервировать ресурсы для доступа продвинутым режимом работы для продвинутой зоны. Сфера действия традиционной зоны и продвинутой зоны может охватывать разные площади в секции 112; может перекрывать определенные площади в секции 112; или могут совпадать друг с другом. Ресурсы могут включать в себя любые соответствующие аппаратные и/или программные ресурсы, используемые в беспроводной связи, например память, процессор, сервер базы данных, сетевое рабочее оборудование, базы данных, возможности процесса передачи данных и так далее.
Подвижная станция 130 также может функционировать как в продвинутом режиме работы, так и в традиционном режиме работы. Таким образом, подвижная станция 130 может выбирать конкретный режим работы для доступа к базовой станции 110. Например, подвижная станция 130 может использовать традиционный режим работы для доступа к традиционной зоне базовой станции 110; или может использовать продвинутый режим работы для доступа к продвинутой зоне базовой станции 110. Кроме того, подвижная станция 130 может переключать доступ между традиционной зоной и продвинутой зоной благодаря использованию процедур коммутации зоны или процедур коммутации систем.
Зона, которая в настоящее время обслуживает подвижную станцию 130 или обеспечивает активную связь доступа, может называться обслуживающей зоной, а зона, в которую переключается подвижная станция 130, может называться целевой зоной. Таким образом, традиционная зона и продвинутая зона базовой станции 110 может быть либо обслуживающей зоной, либо целевой зоной, и коммутация зоны может быть из традиционной зоны в продвинутую зону или из продвинутой зоны в традиционную зону. Кроме того, процедуры коммутации зоны могут инициироваться либо подвижной станцией 130, либо базовой станцией 110.
Во время коммутации зоны подвижная станция 130 может выполнять процедуру ввода целевой зоны для установления связи доступа с целевой зоной. Если подвижная станция 130 заканчивает связь доступа с обслуживающей зоной перед выполнением процедур ввода целевой зоны, то это называется коммутацией зоны по принципу «разрыв-замыкание», поскольку подвижная станция 130 разрывает исходную связь доступа перед вводом целевой зоны. Коммутация зоны по принципу «разрыв-замыкание» может также называться коммутацией зоны по принципу «разрыв-ввод».
С другой стороны, если подвижная станция 130 заканчивает связь с обслуживающей зоной после выполнения процедуры ввода целевой зоны, то это называют коммутацией зоны по принципу «замыкание-разрыв», поскольку подвижная станция 130 делает ввод целевой зоны перед разрывом исходной связи. Коммутацию зоны по принципу «замыкание-разрыв» могут также называть коммутацией зоны по принципу «ввод-разрыв».
И в этом случае со ссылкой на фиг.1, базовая станция 110 и базовая станция 120 может включать в себя любой соответствующий тип беспроводной или радиостанции, например наземную базовую станцию связи или спутниковую базовую станцию связи, в соответствии с определенными стандартами, например стандартами IEEE 802 16е, IEEE 802 16m или другими стандартами.
Как показано на фиг.2, базовая станция 210 для обеспечения высокоскоростной передачи данных и речевых сообщений может включать в себя любой соответствующий тип аппаратуры для передачи речевых сообщений, передачи данных и/или аппаратуры для передачи речевых сообщений и данных. Например, базовая станция 210 может включать в себя приемопередатчик 220 и одну или более антенн 240. Приемопередатчик 220 может включать в себя любой соответствующий тип передатчика и приемника для передачи данных из базовой станции 210 к другим беспроводным устройствам и для приема данных из других беспроводных устройств. Приемопередатчик 220 может включать в себя любой требуемый функциональный компонент (функциональные компоненты), процессор (процессоры) и/или схемы для обеспечения кодирования/декодирования, модуляции/демодуляции, ввода/удаления опорного символа и другие зависимые функции беспроводного канала. Кроме того, приемопередатчик 220 может использовать одну или более антенн 240 для передачи и приема в разных конфигурациях, например с одним входом и одним выходом (SISO), с одним входом и множеством выходов (SIMO), с множеством входов и одним выходом (MISO) и с множеством входов и множеством выходов (MIMO).
Подвижная станция 130 может включать в себя любой соответствующий терминал связи, способный обеспечивать связь с базовой станцией 210 на основе любого из различных стандартов связи, например стандартов IEEE 802.16 (например, IEEE 802.16е, IEEE 802.16m), стандартов IEEE 802.11, многостанционного доступа с кодовым разделением каналов (CDMA), широкополосного многостанционного доступа с кодовым разделением каналов (WCDMA), глобальной системы мобильной связи (GSM) и так далее. Подвижная станция может включать в себя оконечные устройства, например мобильный телефон, ручное устройство или любой тип беспроводного устройства. Подвижная станция 130 может также быть конфигурирована для обеспечения связи с другими терминалами связи (не показанными) непосредственно или косвенно через посредство базовой станции 210, например наземного устройства связи или беспроводного устройства связи. Кроме того, подвижная станция 130 может включать в себя приемопередатчик 230 беспроводной связи для обеспечения связи между подвижной станцией 130 и базовой станцией 210 и/или между подвижной станцией 130 и другими терминалами связи.
Приемопередатчик 230 может включать в себя любой соответствующий тип приемопередатчика связи мобильного устройства, то есть комбинацию передатчика и приемника, имеющую общий частотный контроль. Приемопередатчик 230 может включать в себя различные схемы, предусмотренные для обработки сигналов, генерируемых во время операций передачи и/или приема приемопередатчика 230.
Подвижная станция 130 может дополнительно включать в себя одну или более антенн 250, используемых приемопередатчиком 230 для приема и передачи сигналов от базовой станции 210 и к базовой станции 210, соответственно. Подвижная станция 130 может также быть конфигурирована для функционирования в режиме с одним входом и одним выходом (SISO), с одним входом и множеством выходов (SIMO), с множеством входов и одним выходом (MISO) или с множеством входов и множеством выходов (MIMO). Подвижная станция 120 принимает сигналы или данные из базовой станции 210 по каналу нисходящей линии связи (DL), установленному между подвижной станцией 130 и базовой станцией 210, и передает сигналы или данные к базовой станции 210 по каналу восходящей (спутниковой) линии связи (UL), установленному между подвижной станцией 130 и базовой станцией 210.
Операции подвижной станции 130 и/или базовой станции 210 могут контролироваться контроллером (не показанным на фиг.2). На фиг.3 иллюстрируется характерный контроллер 300, который может быть использован в подвижной станции 130 и/или базовой станции 210. Как показано на фиг.3, контроллер 300 может включать в себя процессор 302, оперативное запоминающее устройство (RAM) 304, постоянное запоминающее устройство (ROM) 306, память 308, интерфейс 310 ввода-вывода, интерфейс 312 связи. Очевидно, что тип и число устройств, входящих в состав контроллера 300, приведены только в качестве примера и не предназначены для ограничения. Число перечисленных устройств может быть изменено, некоторые устройства могут быть удалены, а другие устройства могут быть введены (добавлены).
Процессор 302 может включать в себя любой соответствующий тип универсального микропроцессора, процессора обработки цифровых сигналов, специализированной (заказной) интегральной схемы (ASIC) и/или микроконтроллер. Процессор 302 может выполнять последовательности команды компьютерной программы для выполнения различных функций обработки информации и функции-управления. Процессор 302 может быть связан с другими устройствами или иметь доступ к другим устройствам, например приемопередатчикам, другим процессорам, радиочастотным устройствам и/или антеннам.
RAM 304 и ROM 306 могут включать в себя любой соответствующий тип оперативного запоминающего устройства, постоянного запоминающего устройства или электрически перепрограммируемого постоянного устройства. Память 308 может включать в себя любой соответствующий тип запоминающего устройства большой емкости, предусмотренный для хранения любого типа информации, которая процессору 302 может понадобиться для выполнения обработки/функций. Например, память 308 может включать в себя одно или более жестких дисков, гибких магнитных дисков или других запоминающих устройств для обеспечения области памяти.
Интерфейс 310 ввода-вывода может посылать сигналы управления и данных к другим устройствам из процессора 302 и может принимать сигналы управления и данных, посланных из других устройств к процессору 302. Интерфейс 312 связи может обеспечивать соединения обеспечения связи для обеспечения контроллеру 300 возможности обмена информацией с другими системами, например, через посредство компьютерной сети, например сети интернет.
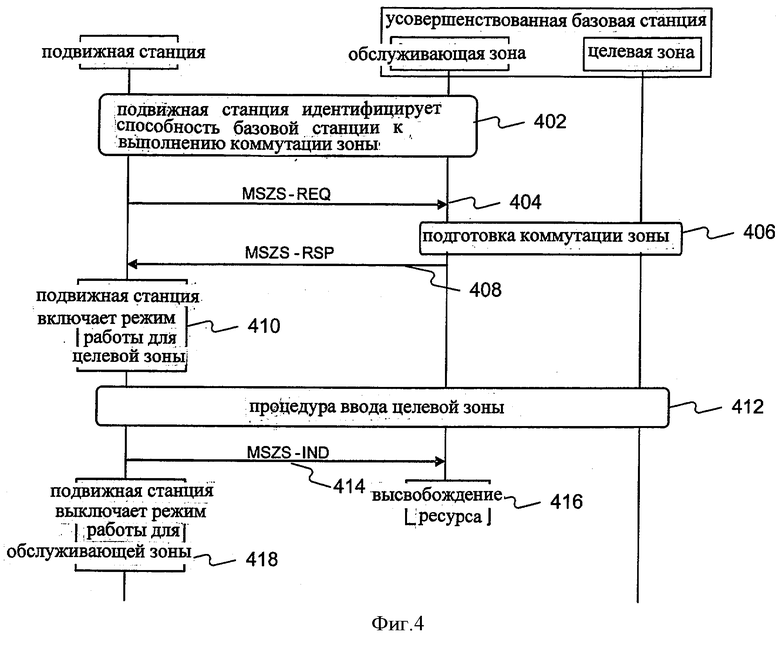
Как описано ранее, коммутация зоны может быть выполнена между подвижной станцией 130 и базовой станцией 110 и коммутация зоны может инициироваться либо подвижной станцией 130, либо базовой станцией 110. На фиг.4 иллюстрируется характерный процесс коммутации, инициируемый подвижной станцией. Если иначе не указано, то все этапы в этом процессе, описанном в этой заявке, выполняются базовой станцией 110, базовой станцией 120 и/или подвижной станцией 130, а более конкретно, процессором 302 базовой станции 110, базовой станции 120 и/или подвижной станции 130.
Как показано на фиг.4, коммутация зоны может инициироваться подвижной станцией 130 через посредство процедуры коммутации зоны по принципу «замыкание-разрыв» с базовой станцией 110, которая является усовершенствованной базовой станцией. Сначала подвижная станция 130 идентифицирует способность базовой станции к способности выполнению коммутации (402) зоны. Базовая станция 110 является способной к выполнению коммутации зоны, если базовая станция 110 может активировать как традиционную зону и продвинутую зону для обеспечения связи с подвижной станцией 130. Может быть несколько способов извещения о способности базовой станции 110 к выполнению коммутации зоны для подвижной станции 130. Например, базовая станция 110 может извещать об этой способности используя тип сообщения индикации, например сообщение индикации (ALT_ZON-IND) альтернативной зоны подвижной станции 130, или базовая станция 110 может извещать об этой способности используя индикатор альтернативный зоны, транспортируемый другими типами сообщений подвижной станции 130.
Индикатор альтернативной зоны может быть индикатором, битом или несколькими битами в сообщениях. Например, резервируемый бит в заголовке управления блока данных (FCH) систем IEEE 802.16 может быть использован для представления индикатора альтернативной зоны, как показано в Таблице 1.
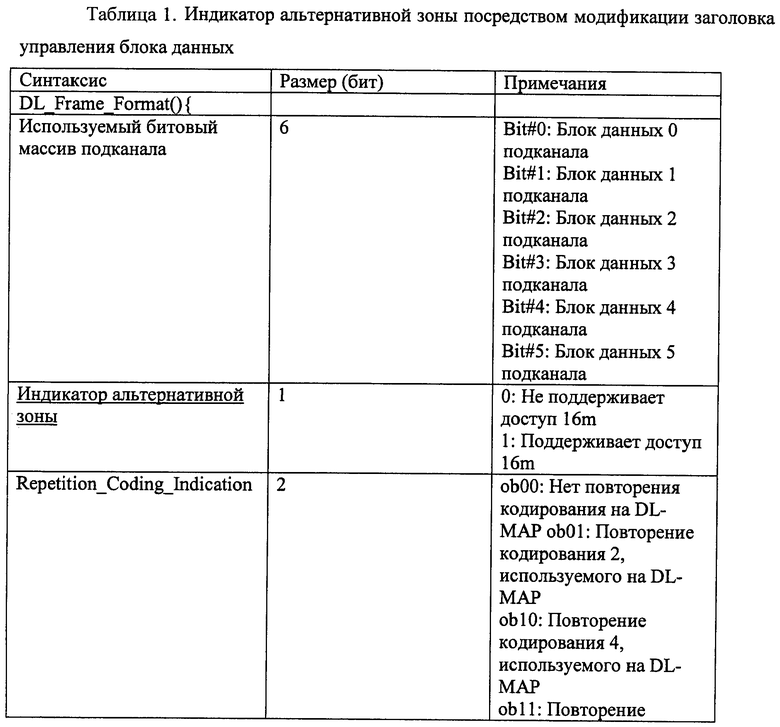
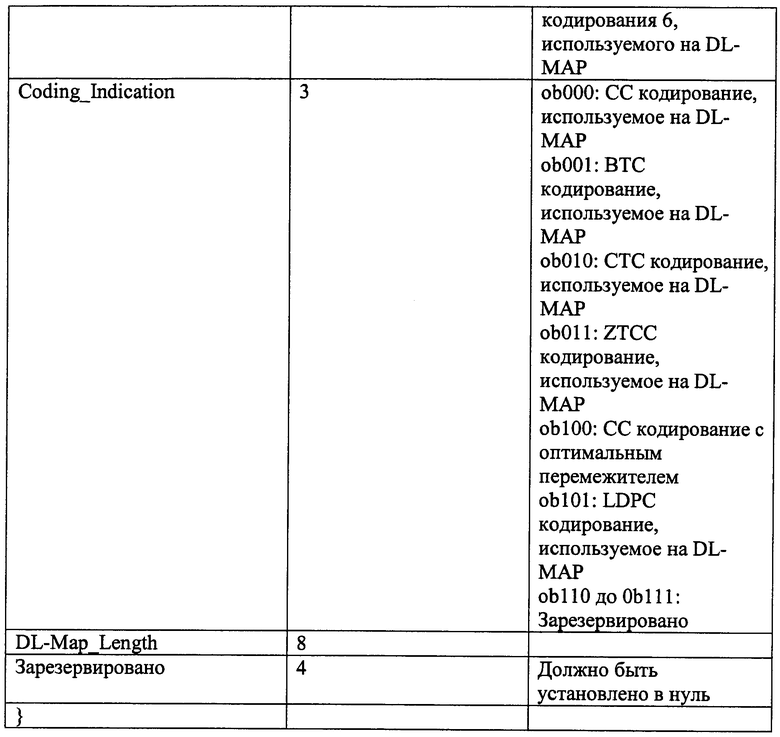
Как показано в Таблице 1, индикатор альтернативной зоны включает в себя один зарезервированный бит. Один зарезервированный бит, имеющий значение «1», указывает на способность коммутации зоны (например, продвинутого режима работы, соответствующего стандарту IEEE 802.16m); тогда как имеющееся значение «0» не указывает на поддержание коммутации зоны. Могут быть использованы также другие способы детектирования способности коммутации зоны.
После идентификации того, что базовая станция 110 способна к выполнению коммутации 402 зоны, подвижная станция 130 посылает сообщение запроса коммутации зоны, например сообщение (запроса коммутации зоны подвижной станции) MSZS-REQ, к базовой станции 110 (404). Подвижная станция 130 посылает сообщение MSZS-REQ базовой станции 110 через обслуживающую зону для запроса на выполнение коммутации зоны. Запрос коммутации зоны содержит идентификацию подвижной станции 130 для информирования базовой станции 110, которая запрашивается для коммутации зоны.
После приема запроса коммутации зоны от подвижной станции 130 базовая станция определяет принять или отвергнуть запрос коммутации зоны. Если базовая станция 110 разрешает принять запрос коммутации зоны, то базовая станция 110 выполняет подготовку 406 коммутации зоны. Например, базовая станция 110 может проверять активирована или не активирована целевая зона. Если целевая зона не активирована, то базовая станция 110 активирует целевую зону во время подготовки коммутации зоны. Базовая станция 110 может также распределять ресурсы в целевой зоне для поддержания подобного качества обслуживания (QOS) в обслуживающей зоне. Кроме того, базовая станция 110 может передать или отобразить параметры пользователя и все параметры, сообщения и ресурс для контроля связи, например аутентификации, управления ключом, регистрации информации, функции индикации времени, буферного устройства, последовательностей ретрансляции и других требуемых объектов, из обслуживающей зоны целевой зоне.
Базовая станция 110 также отвечает подвижной станции 130 сообщением 408 отклика (MSZS-RSP) на запрос коммутации зоны. Сообщение MSZS-RSP может включать в себя информацию, относящуюся к коммутации зоны, включающую в себя информацию целевой зоны, например параметры синхронизации (например, индекс канала синхронизации, ошибку синхронизации для целевой зоны), новую идентификацию подвижной станции, функцию индикации времени коммутации зоны и факультативную новую конфигурацию/параметры защиты.
С другой стороны, если базовая станция 110 отвергает запрос коммутации зоны, то базовая станция 110 может игнорировать запрос или посылать подвижной станции 130 сообщение MSZS-RSP с индикацией отказа. Если подвижная станция 130 не принимает отклик на запрос коммутации зоны в течение периода времени или принимает индикацию отказа, то подвижная станция 130 останавливает процедуру коммутации зоны.
Если базовая станция 110 принимает запрос коммутации зоны и передает индикацию такого приема в сообщении MSZS-RSP, то подвижная станция включает режим работы для целевой зоны (410). Подвижная станция 130 также выполняет процедура ввода целевой зоны для установления связи доступа с целевой зоной (412). Если процедура ввода целевой зоны успешно завершена до истечения функции индикации времени коммутации зоны, то подвижная станция 130 посылает сообщение индикации коммутации зоны, например сообщение (индикации коммутации зоны подвижной станции) MSZS-IND, базовой станции 110 через обслуживающую зону для уведомления базовой станции 110 о том, что процедура ввода целевой зоны прошла успешно (414).
После приема сообщения MSZS-IND базовая станция 110 освобождает ресурсы обслуживающей зоны для подвижной станции 130 и очищает машинные параметры состояния обслуживающей зоны для подвижной станции 130 (416). Базовая станция 110 также подтверждает успех ввода целевой зоны и освобождения ресурсов в обслуживающей зоне. Подвижная станция 130 выключает режим работы обслуживающей зоны (418).
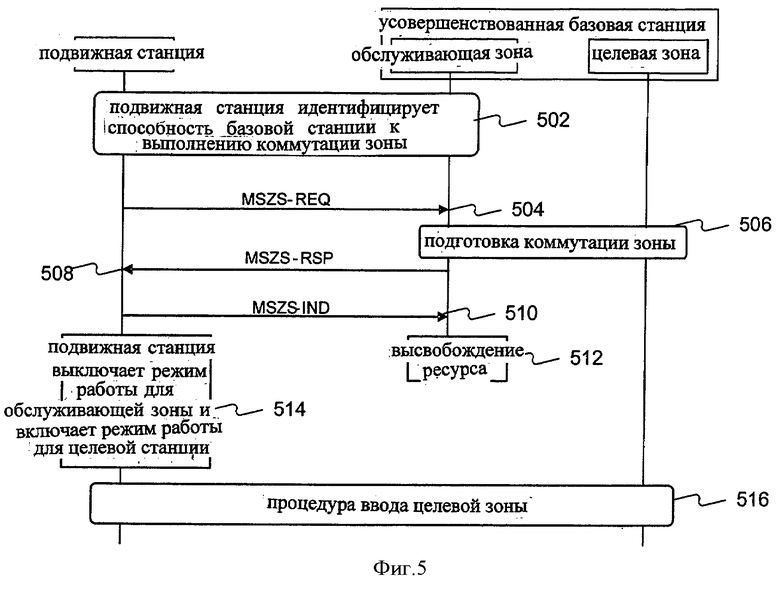
На фиг.5 иллюстрируется другой характерный инициируемый процесс коммутации зоны. Как показано на фиг.5, коммутация зоны может быть инициирована подвижной станцией 130 через посредство процедуры коммутации зоны по принципу «разрыв-замыкание» с базовой станцией 110. Операции 502, 504, 506 и 508 подобны операциям 402, 404, 406 и 408, иллюстрируемым на фиг.4, соответственно. Во время операции 510 подвижная станция 130 посылает сообщение индикации коммутации зоны, например сообщение (индикации коммутации зоны подвижной станции) MSZS-IND, базовой станции 110 перед выполнением процедуры ввода какой-либо целевой зоны. После приема сообщения MSZS-IND базовая станция 110 освобождает ресурсы обслуживающей зоны для подвижной станции 130 (512), как в операции 416 (фиг.4). Базовая станция 110 принимает сообщение MSZS-IND через обслуживающую зону.
Кроме того, подвижная станция 130 включает режим работы для целевой зоны и выключает режим работы для обслуживающей зоны (514), как в операциях 410 и 418 (фиг.4). Подвижная станция 130 дополнительно выполняет процедуру ввода целевой зоны для установления доступа связи с целевой зоной (этап 516), как на этапе 412 (фиг.4).
Для вышеописанных процессов коммутации зоны, иллюстрируемых на фиг.4 и фиг.5, если подвижной станции 130 нужно отменить процедуру коммутации зоны, то подвижная станция 130 может использовать сообщение индикации коммутации зоны для отправления запроса отмены базовой станции 110 через обслуживающую зону. После приема запроса отмены базовая станция 110 останавливает процедуру коммутации зоны и не высвобождает ресурсов для подвижной станции 130 в обслуживающую зону. Подвижная станция 130 может дополнительно решать использовать ли ей способ по принципу «замыкание-разрыв» или способ по принципу «разрыв-замыкание», основываясь на определенных условиях, например текущем статусе обслуживающей зоны и целевой зоны, оцененной успешной скорости коммутации зоны, статусе и качестве текущей связи доступа с базовой станцией 110 и так далее.
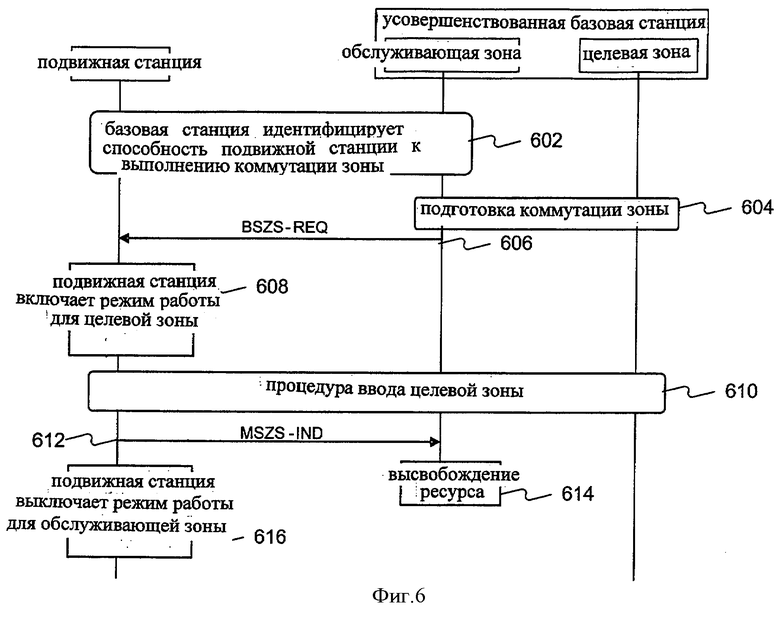
На фиг.6 иллюстрируется характерный инициируемый процесс коммутации зоны базовой станции. Как показано на фиг.6, коммутация зоны может быть инициирована базовой станцией 110 через посредство процедуры коммутации зоны по принципу «замыкание-разрыв» с подвижной станцией 130. Сначала базовая станция 110 идентифицирует способность подвижной станции 130 к выполнению коммутации зоны (602). Подвижная станция 130 способна к выполнению коммутации зоны, если подвижная станция 130 может поддерживать как традиционный режим работы, так и продвинутый режим работы для обеспечения связи с базовой станцией 110. Может быть несколько способов для базовой станции 110 идентифицировать способность к выполнению коммутации зоны подвижной станции 130.
Например, базовая станция 110 может быть способной к детектированию сообщения индикации усовершенствованной подвижной станции или индикатор усовершенствованной подвижной станции, передаваемый в других сообщениях из подвижной станции 130. Подвижная станция 130 может посылать сообщение индикации усовершенствованной подвижной станции или индикатор усовершенствованной подвижной станции, передаваемый в других сообщениях, при запросе из базовой станции 110 или спонтанно. Сообщение индикации усовершенствованной подвижной станции или индикатор усовершенствованной подвижной станции может индицировать, является ли подвижная станция 130 усовершенствованной подвижной станцией или традиционной подвижной станцией.
Индикатор усовершенствованной подвижной станции может быть индикатором, битом или несколькими битами в определенных типах сообщений. Например, индикатор усовершенствованной подвижной станции может передаваться управляющим сообщением связи по каналу восходящей (спутниковой) линии связи, например зарезервированным битом в запросе диапазона (RNG-REQ) в системах на основе стандарта IEE 802.16, как показано в Таблице 2.
Как показано в Таблице 2, индикатор усовершенствованной подвижной станции может включать в себя один зарезервированный бит. Один зарезервированный бит, имеющий значение «1», указывает на способность коммутации зоны (например, продвинутый режим, соответствующий стандарту IEEE 802 16m); тогда как наличие значения «0» не указывает на поддерживание коммутации зоны.
После идентификации того, что подвижная зона 130 имеет способность к выполнению коммутации зоны (602), базовая станция 110 выполняет подготовку коммутации зоны (этап 604). Например, базовая станция 110 может проверять, активирована целевая зона или нет. Если целевая зона не является активированной, то базовая станция 110 может активировать целевую зону во время подготовки коммутации зоны. Базовая станция 110 может также распределять ресурсы в целевой зоне для поддержания подобного качества обслуживания (QOS) в обслуживающей зоне. Кроме того, базовая станция 110 может передать или отобразить параметры пользователя и все параметры, сообщения и ресурсы для контроля связи, например аутентификации, управления ключом, регистрации информации, функции индикации времени, буферных устройств, последовательностей ретрансляции и других требуемых объектов, из обслуживающей зоны целевой зоне.
Кроме того, базовая станция 110 посылает подвижной станции 130 сообщение запроса коммутации зоны, например BSZS-REQ, для инициирования процедуры коммутации зоны. Сообщение запроса коммутации зоны может содержать информацию целевой зоны, например параметры синхронизации (например, индекс канала синхронизации, ошибку синхронизации для целевой зоны), новую идентификацию подвижной станции, функцию индикации времени коммутации зоны и факультативную новую конфигурацию/параметры защиты. Другая информация также может быть включена с сообщение запроса коммутации зоны.
Остальные операции 608, 610, 612, 614 и 616 подобны операциям 410, 412, 414, 416 и 418, иллюстрируемым на фиг.4, соответственно, для завершения процедуры коммутации зоны между подвижной станцией 130 и базовой станцией 110 через посредство процедуры по принципу «замыкание-разрыв».
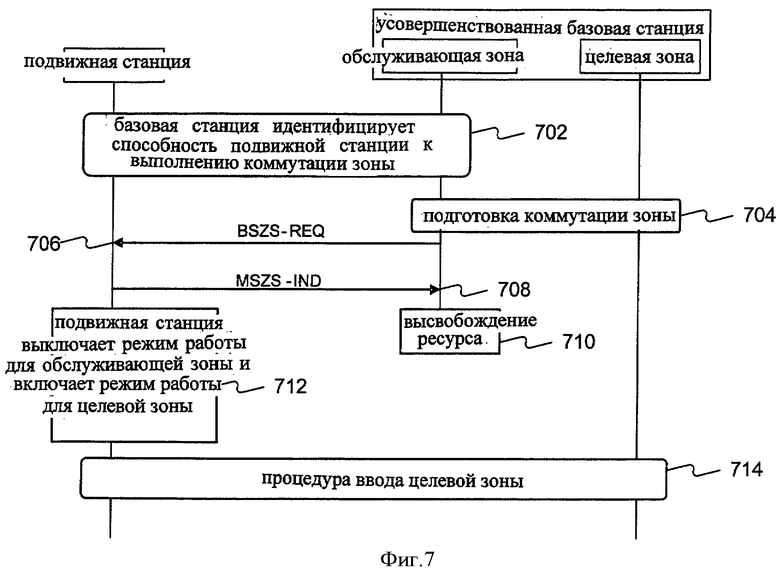
На фиг.7 иллюстрируется другой характерный инициируемый базовой станцией процесс коммутации зоны. Как показано на фиг.7, коммутация зоны может инициироваться базовой станцией 110 через посредство процедуры коммутации зоны по принципу «разрыв-замыкание» с подвижной станцией 130. Операции 702, 704 и 706 подобны операциям 602, 604 и 606, иллюстрируемым на фиг.6, соответственно. Кроме того, операции 708, 710, 712 и 714 аналогичны или подобны операциям 510, 512, 514 и 516, иллюстрируемым на фиг.5, соответственно, для завершения процедуры коммутации зоны между подвижной станцией 130 и базовой станцией 110 через посредство процедуры «разрыв-замыкание».
Подобно процедуре коммутации зоны, инициируемой подвижной станцией, во время процедуры коммутации зоны, инициируемой базовой станцией, показанной на фиг.6 и фиг.7, если подвижная станция 130 требует отмены процедуры коммутации зоны, то подвижная станция 130 может использовать сообщение индикации коммутации зоны для передачи запроса отмены к базовой станции 110 через обслуживающую зону. После приема запроса отмены базовая станция 110 останавливает процедуру коммутации зоны и сохраняет ресурс для подвижной станции 130 в традиционной зоне.
Как следует из фиг.1, подвижная станция 130 может двигаться из секции 112 к секции 122 или двигаться из секции 122 к секции 112, и процедуры хэндовера могут выполняться так, чтобы подвижная станция 130 сохраняла активные сеансы связи или линии связи при коммутации между базовыми станциями, соответственно, соответствующими секциям. Базовая станция, контролирующая секцию, к которой переключается подвижная станция 130, может быть названа целевой базовой станцией, а базовая станция, контролирующая секцию, из которой переключается подвижная станция 130, может называться обслуживающей базовой станцией. Обслуживающая базовая станция или целевая базовая станция может быть либо усовершенствованной базовой станцией или традиционной базовой станцией. Таким образом, процедуры хэндовера могут включать в себя процедуры хэндовера от обслуживающей традиционной базовой станции к целевой усовершенствованной базовой станции и от обслуживающей усовершенствованной базовой станции к целевой традиционной базовой станции. Процедуры хэндовера между подобными системами, то есть от обслуживающей традиционной базовой станции к целевой традиционной базовой станции и от обслуживающей усовершенствованной базовой станции к целевой усовершенствованной базовой станции, находятся в системах подобных стандартов и подробно не обсуждаются в этой заявке.
Кроме того, процедуры хэндовера могут предусматривать одноступенчатую процедуру хэндовера и двухступенчатую процедуру хэндовера. Одноступенчатый хэндовер, как используется в этой заявке, относится к одному переключению от обслуживающей базовой станции к целевой базовой станции; тогда как двухступенчатый хэндовер относится к более чем одному переключению от обслуживающей базовой станции к целевой базовой станции. Например, двухступенчатый хэндовер может предусматривать переключение от обслуживающей базовой станции к целевой базовой станции и коммутацию зоны от обслуживающей зоны к целевой зоне. На фиг.8 иллюстрируется характерная процедура одноступенчатого хэндовера от обслуживающей традиционной базовой станции (например, базовой станции 120) к целевой усовершенствованной базовой станции (например, базовой станции 110).
Как показано на фиг.8, подвижная станция 130 получает информацию соседней секции (802). Подвижная станция 130 может получать информацию соседней секции от обслуживающей традиционной базовой секции (базовой секции 120). Например, подвижная станция 130 может принимать и анализировать определенные сообщения из обслуживающей базовой станции и/или из целевой базовой станции для получения информации соседней секции. Подвижная станция 130 анализирует информацию соседней секции, основываясь на взаимосвязи между информации традиционной синхронизации и информацией продвинутой синхронизации. То есть, обслуживающая традиционная базовая станция (базовая станция 120) включает в себя набор информации традиционной синхронизации, чтобы указывать или означать для подвижной станции 130, что подобная базовая станция может быть усовершенствованными базовыми станциями.
Например, традиционная базовая станция 120, использующая стандарты IEEE 802.16е, может вводить традиционный индекс преамбулы в рекламных сообщениях соседних секций (например, MOB_NBR-ADV) для предположения о существовании соседних усовершенствованных базовых станций, основываясь на информации традиционной синхронизации в рекламных сообщениях соседних секций, и может сканировать и исследовать соседние усовершенствованные базовые станции, основываясь на информации, отображающейся из информации традиционной синхронизации в рекламных сообщениях соседних секций.
Традиционные рекламные сообщения соседних секций могут неявно или недвусмысленно содержать информацию о соседних усовершенствованных базовых станциях, например информацию о синхронизации и информацию о мощности. Также могут быть предопределены отображающиеся взаимосвязи между традиционными преамбулами (например, IEEE 802.16е) и продвинутыми преамбулами (например, IEEE 802.16m). Таким образом, традиционная базовая станция (например, IEEE 802.16е) может вводить продвинутый (например, IEEE 802.16е) индекс преамбулы в сообщения MOB_NBR-ADV для неявного выражения возможных преамбул соседних усовершенствованных (например, IEEE 802.16m) базовых станций. Подвижная станция 130 с традиционной обслуживающей базовой станцией (базовой станцией 120) может сканировать соседние традиционные базовые станции, основываясь на традиционном (например, IEEE 802.16e) индексе преамбулы, рекомендуемом в сообщениях MOB_NBR-ADV, и может также сканировать соседние усовершенствованные базовые станции, основываясь на преамбулах, относящихся к продвинутому (например, IEEE 802.16m) индексу преамбулы.
Например, информация о соседних базовых станциях может быть вставлена в традиционное рекламное сообщение соседней секции (например, MOB_NBR-ADV). Формат вставленной информации о соседней базовой станции должен быть совместим с традиционным форматом так, чтобы информация могла быть необходима для предопределения. Кроме того, индикатор может быть введен для определения, что соседняя информация из традиционной базовой станции или усовершенствованной базовой станции. Например, поле «индекса преамбулы» в сообщении MOB_NBR-ADV IЕЕЕ 802.16e является восьмибитовым полем, в котором наиболее значительным битом (MSB) является фактор повторного использования (частоты), а остальные 7 битов представляют 114 индексов преамбулы. Поскольку имеется, по меньшей мере, 512 каналов вторичной синхронизации (S-SCH) или вызываемая вторичная продвинутая преамбула, соответствующая стандарту IEEE 802.16m, поле «индекса преамбулы» может оказаться неспособным представлять каналы вторичной синхронизации в сообщении MOB_NBR-ADV IEEE 802.16е.
Однако поскольку поле «индекса преамбулы» в сообщении MOB_NBR-ADV может представлять 128 значений (7 бит), а используется только 114 значений, неиспользуемыми являются 14 значений. Кроме того, если считать в MSB, который является фактором повторного использования равным 2, то неиспользуемыми являются всего 28 значений. Таким образом, эти 28 неиспользованных значений могут быть использованы как демаркация между преамбулой/индексами SCH IEEE 802.16e и информацией IEEE 802.16m. Другими словами, если величина поля «индекса преамбулы» меньше или равна 113 (принадлежит к набору индекса преамбулы 16e), то все системы IEEE 802.16e и IEEE 802.16m признают эту величину как действующий индекс преамбулы IEEE 802.16e. Однако, если величина поля «индекса преамбулы» больше 113, то система IEEE 802.16e может пропустить эту соседнюю информацию, поскольку она не может ее распознать, тогда как система IEEE 802.16m может распознать эту величину как действительную соседнюю информацию IEEE 802.16m. Кроме того, соседняя информация IEEE 802.16m может кодироваться в соответствии с традиционным принципом (тип, длина и величина) TLV с заданными параметрами и объектами.
После получения информации о соседней секции (802) подвижная станция 130 может найти кандидатные соседние усовершенствованные базовые станции, основываясь на информации соседней секции (804). Альтернативно или дополнительно, подвижная станция 130 может также обнаружить новые целевые базовые станции путем использования сканирования (поиска вызовов) автономных базовых станций. Кроме того, подвижная станция 130 может определять целевую усовершенствованную базовую станцию (например, базовую станцию 110), основываясь на заданных критериях, например, качестве сигнала или качестве связи и так далее. Кроме того, подвижная станция 130 или обслуживающая базовая станция 120 может инициировать традиционные процедуры хэндовера с обслуживающей традиционной базовой станцией (806). После окончания традиционных процедур хэндовера подвижная станция 130 и обслуживающая базовая станция 120 может прервать связь доступа с обслуживающей традиционной базовой станцией (806).
Кроме того, подвижная станция 130 может включить продвинутый режим работы (808) и может выполнять продвинутые процедуры ввода в сеть с целевой усовершенствованной базовой станцией (810) и выполнять продвинутые процедуры ввода в сеть через продвинутую зону целевой усовершенствованной базовой станцией. После завершения продвинутых процедур ввода в сеть (810) подвижная станция 130 и целевая усовершенствованная станция (например, базовая станция 110) могут входить в нормальное функционирование в продвинутом режиме работы (812).
На фиг.9 иллюстрируется характерная одноступенчатая процедура хэндовера от обслуживающей усовершенствованной базовой станции (базовой станции 110) к целевой традиционной базовой станции (базовой станции 120). Как показано на фиг.9, подвижная станция 130 может получать информацию соседнего сегмента (902). Подвижная станция 130 может получать информацию соседнего сегмента от обслуживающей усовершенствованной базовой станции (базовой станции 110). Например, подвижная станция 130 может принимать и анализировать определенные сообщения из обслуживающей базовой станции и/или из целевой базовой станции для получения информации соседнего сегмента.
Обслуживающая усовершенствованная базовая станция (базовая станция 110) может быть способной обеспечивать информацию синхронизации соседней базовой станции как для традиционных, так и для усовершенствованных базовых станций. Например, базовая станция 110 может транслировать рекламные сообщения соседнего сегмента, содержащие информацию синхронизации соседних традиционных (например, IEEE 802.16е) и усовершенствованных (например, IEEE 802.16m) базовых станций. Используя эту информацию, подвижная станция 130 может быть способной выполнять сканирование соседних как традиционных, так и усовершенствованных базовых станций.
После получения информации соседнего сегмента (902) подвижная станция 130 может выполнять сканирование базовой станции, основываясь на информации соседней секции для нахождения кандидатных соседних традиционных базовых станций (904). Альтернативно или дополнительно, подвижная станция 130 может также обнаруживать новые целевые базовые станции путем использования сканирования автономных базовых станций. Кроме того, подвижная станция 130 может находить кандидатные соседние базовые станции и идентифицировать целевую традиционную базовую станцию (например, базовую станцию 120), основываясь на заданных критериях, например качестве сигнала или качестве связи и так далее. Подвижная станция 130 и обслуживающая базовая станция 110 могут также инициировать продвинутые процедуры хэндовера (906). После завершения продвинутых процедур хэндовера подвижная станция 130 и обслуживающая станция 110 могут завершить связь доступа между подвижной станцией 130 и обслуживающей усовершенствованной станцией 110 (906).
Кроме того, подвижная станция 130 включает традиционный режим работы (908) и выполняет традиционные процедуры входа в сеть с целевой традиционной базовой станцией (910). После завершения традиционных процедур входа в сеть (910) подвижная станция 130 и целевая традиционная базовая станция (например, базовая станция 120) входят в нормальное функционирование в традиционном режиме работы (912).
На фиг.10А иллюстрируется высокоуровневая характерная двухступенчатая процедура хэндовера от обслуживающей традиционной базовой станции к целевой усовершенствованной базовой станции. Как показано на фиг.10А, подвижная станция 130 на ступени 1 выполняет процедуры традиционного хэндовера и входа в сеть (1002). То есть, подвижная станция 130, обслуживающая традиционная базовая станция 120 и целевая усовершенствованная базовая станция 110 завершают традиционные процедуры хэндовера, например процедуры сканирования соседней базовой станции, процесса хэндовера, входа в сеть и так далее, так что подвижная станция 130 передается от обслуживающей традиционной базовой станции 120 к традиционной зоне целевой усовершенствованной базовой станции 110.
Кроме того, подвижная станция 130 и усовершенствованная базовая станция 110 выполняют процедуры коммутации зоны для переключения связи доступа между подвижной станцией 130 и базовой станцией 110 из традиционной зоны в продвинутую зону на ступени 2 (1004). Процедуры коммутации зоны могут инициироваться подвижной станцией 130 и целевой усовершенствованной базовой станцией 110 при использовании способа коммутации по принципу «замыкание-разрыв» или «разрыв-замыкание», как описано ранее. После процедур коммутации зоны подвижная станция 130 и усовершенствованная базовая станция 110 осуществляют нормальное функционирование в продвинутом режиме работы (1006).
На фиг.10В иллюстрируется высокоуровневая характерная двухступенчатая процедура хэндовера от обслуживающей усовершенствованной базовой станции (например, базовой станции 110) к целевой традиционной базовой станции (например, базовой станции 120). Как показано на фиг.10В, подвижная станция 130 и обслуживающая усовершенствованная базовая станция 110 выполняют процедуры коммутации зоны на ступени 1 для коммутации связи доступа между подвижной станцией и базовой станцией 110 из продвинутой зоны в традиционную зону (1052). Процедуры коммутации зоны могут инициироваться подвижной станцией 130 или целевой усовершенствованной базовой станцией 110 при использовании способа коммутации по принципу «замыкание-разрыв» или «разрыв-замыкание», как описано ранее.
Кроме того, подвижная станция 130 и целевая традиционная базовая станция 120 могут завершать традиционные процедуры хэндовера (1054), например процедуры сканирования соседней базовой станции, процесса хэндовера и входа в сеть и так далее, на ступени 2, так, чтобы подвижная станция 130 передавалась от обслуживающей усовершенствованной базовой станции 110 целевой традиционной базовой станции 120. После процедур хэндовера подвижная станция 130 и традиционная базовая станция 120 осуществляют нормальное функционирование в традиционном режиме работы (1056).
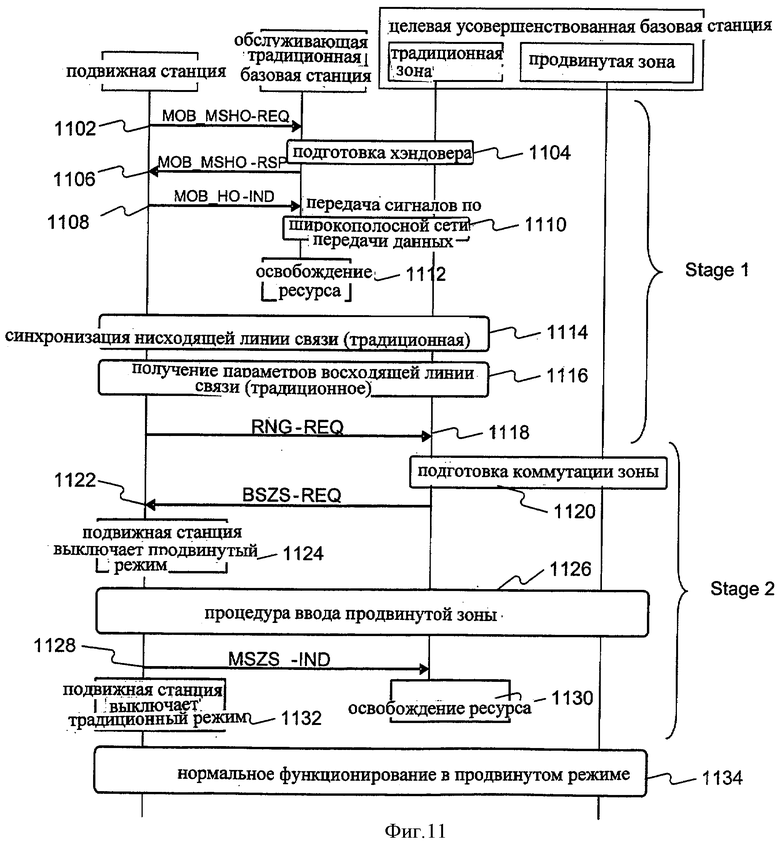
Хотя на фиг.10А и фиг.10В показано, что ступени 1 и ступень 2 выполняются отдельно, разделение ступени 1 и ступени 2 используют только с целью иллюстрации. Ступень 1 и ступень 2 не являются полностью независимыми процедурами, и процедуры ступени 1 и ступени 2 могут быть тесно связаны для обеспечения различных преимуществ, например эффективности, скорости, передачи сигналов и/или практичности. На фиг.11 иллюстрируется характерная двухступенчатая процедура хэндовера от обслуживающей традиционной базовой станции к целевой усовершенствованной базовой станции.
Как показано на фиг.11, подвижная станция 130 посылает запрос хэндовера обслуживающей традиционной базовой станции 120 через посредство сообщения (MOB_MSHO-REQ) запроса хэндовера (1102). После приема запроса хэндовера обслуживающая традиционная базовая станция 120 осуществляет подготовку хэндовера (1104) и посылает подвижной станции 130 отклик на запрос хэндовера через посредство сообщения (MOB_MSH-RSP) отклика на запрос хэндовера (1106). Кроме того, подвижная станция 130 посылает обслуживающей традиционной базовой станции 120 индикацию хэндовера через посредство сообщения (MOB_HO-IND) индикации хэндовера (1108). После приема сообщения MOB_HO-IND от подвижной станции 130 обслуживающая традиционная базовая станция 120 передает сигналы по широкополосной сети передачи данных для уведомления целевой усовершенствованной базовой станции 110 о хэндовере вместе с информацией о подвижной станции 130 (1110). Передача сигналов по широкополосной сети передачи данных относится к набору действий с сигнальными элементам сетей базы данных базовой станции, например регистра расположения в пределах собственной сети (HLR), наезжий регистр местоположения (VLR) и/или сервер аутентификации, санкционирования и учета (ААА). Кроме того, обслуживающая традиционная базовая станция 120 прекращает связь доступа между подвижной станцией 130 и обслуживающей традиционной базовой станцией 120 и освобождает ресурсы для подвижной станции 130 (1112).
Подвижная станция 130 выполняет синхронизацию нисходящей линии связи с целевой усовершенствованной базовой станцией 110 (этап 1114) и получает параметры восходящей линии связи от целевой усовершенствованной базовой станции 110 (1116). Подвижная станция 130 выполняет эти действия в традиционном режиме работы с традиционной зоной базовой станции 110 для выполнения традиционных процедур входа в сеть к традиционной зоне целевой усовершенствованной базовой станции 110. Однако при выполнении запроса диапазона (RNG-REQ) во время традиционных процедур входа в сеть, подвижная станция 130 может вводить индикатор усовершенствованной подвижной станции в сообщение запроса диапазона для информирования целевой базовой станции 110 о том, что подвижная станция 130 является усовершенствованной подвижной станцией (например, IEEE 802.16m).
После приема индикатора усовершенствованной подвижной станции от подвижной станции 130 целевая усовершенствованная базовая станция 110 начинает выполнять инициируемые базовой станцией процедуры коммутации зоны из традиционной зоны в продвинутую зону через посредство операций 1120, 1122, 1124, 1126, 1128, 1130 и 1132, которые являются подобными операциям 604, 606, 608, 610, 612, 614 и 616, иллюстрируемым на фиг.6, соответственно, до завершения коммутации зоны. После завершения как процедур хэндовера, так и процедуры коммутации зоны, подвижная станция 130 и целевая усовершенствованная базовая станция 110 входят в нормальное функционирование в продвинутом режиме работы (1134). В некоторых вариантах осуществления, после приема индикатора усовершенствованной подвижной станции от подвижной станции 130, целевая усовершенствованная базовая станция 110 может непосредственно передать подвижную станцию 130 из традиционной зоны обслуживающей традиционной базовой станции 120 в продвинутую зону целевой усовершенствованной базовой станции 110 до завершения процедуры хэндовера между традиционной зоной обслуживающей традиционной базовой станции в традиционную зону целевой усовершенствованной базовой станции 110.
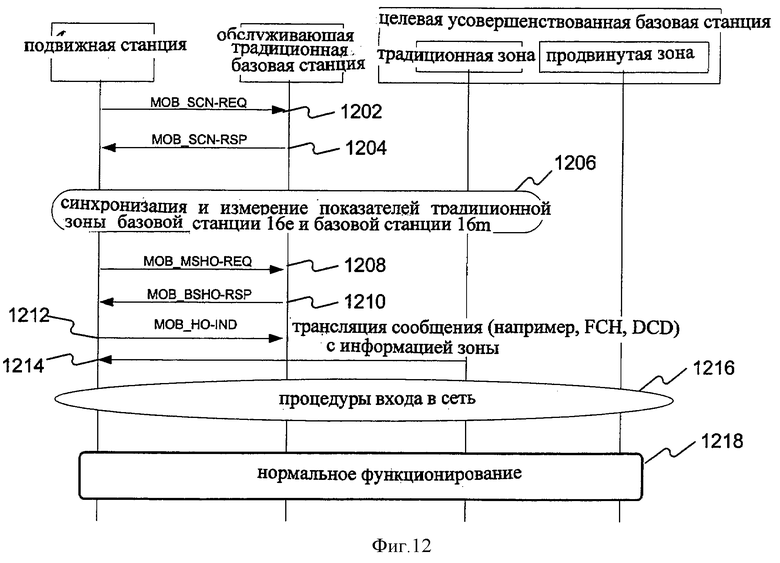
На фиг.12 иллюстрируется характерная двухступенчатая процедура хэндовера от обслуживающей традиционной базовой станции (например, базовой станции 120) целевой усовершенствованной базовой станции (например, базовой станции 110). Подвижная станция 130 посылает сообщение (MOB_SCN-REQ) запроса сканирования соседней традиционной базовой станции обслуживающей традиционной базовой станции 120 (1202). Обслуживающая традиционная базовая станция 120 возвращает подвижной станции 130 сообщение (MOB_SCN-RSP) о реакции на сканирование традиционной соседней базовой станции (1204). Сообщение о реакции может включать в себя информацию о соседних традиционных базовых станциях, включающих в себя традиционную зону целевой усовершенствованной базовой станции 110.
Основываясь на информации в сообщении о реакции, подвижная станция 130 синхронизирует и измеряет показатели соседних традиционных базовых станций и традиционной зоны целевой усовершенствованной базовой станции 110 (1206) и определяет хэндовер в традиционную зону целевой усовершенствованной базовой станции 110. Кроме того, подвижная станция 130 посылает обслуживающей традиционной базовой станции 120 запрос хэндовера через посредство сообщения (MOB_MSHO-REQ) запроса хэндовера (1208). После приема запроса хэндовера обслуживающая традиционная базовая станция осуществляет подготовку хэндовера и посылает подвижной станции 130 реакцию хэндовера через посредство сообщения (MOB_BSHO-RSP) реакции хэндовера (1210). Кроме того, подвижная станция 130 посылает обслуживающей базовой станции 120 индикацию хэндовера через посредство сообщения (MOB_HO-IND) индикации хэндовера (1212). Обслуживающая традиционная базовая станция 120 также прерывает связь доступа между подвижной станцией 130 и обслуживающей традиционной базовой станцией 120 и высвобождает ресурсы для подвижной станции 130.
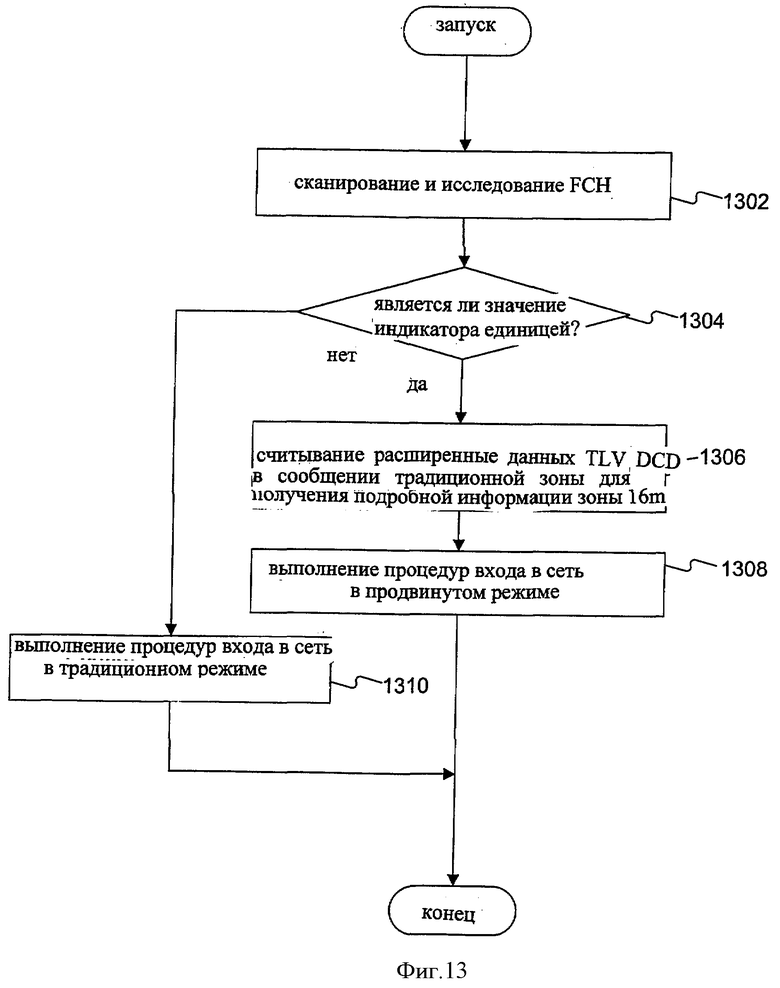
Подвижная станция 130 может также получать транслируемые сообщения из традиционной зоны целевой усовершенствованной базовой станции 110 (1212). Транслируемое сообщение может включать в себя информации о способности целевой усовершенствованной базовой станции 110, например FCH (заголовок управления блока данных) и DCD (описание канала нисходящей линии связи (1214)). Подвижная станция 130 может выполнять процедуры входа в целевую сеть, основываясь на информации, полученной из традиционной зоны целевой усовершенствованной базовой станции 110 (1216). На фиг.13 иллюстрируется характерный процесс, выполняемый подвижной станцией 130 для входа в целевую сеть.
Как показано на фиг.13, подвижная станция 130 сканирует и считывает заголовок управления блока данных для индикатора способности усовершенствованной базовой станций (1302). Например, подвижная станция может считывать индикатор «IEEE 802.16m», например индикатор альтернативной зоны в Таблице 1, и определяет, является ли значение индикатора единицей (этап 1304). Если подвижная станция 130 определяет, что значение индикатора является единицей (например, 1304; да), то подвижная станция 130 считывает расширенные данные TLV (типа, длины и величины) DCD (описания канала нисходящей линии связи) в сообщении традиционной зоны для получения подробной продвинутой информации зоны (например, IEEE 802.16m) (1308). С другой стороны, если подвижная станция 130 определяет, что значение индикатора не является единицей (1304; нет), то подвижная станция 130 выполняет процедуры входа в сеть в традиционной зоне работы (1310).
Возвращаясь снова к фиг.12, после выполнения процедур входа в сеть (1216) подвижная станция 130 входит в нормальное функционирование с базовой станцией 110 (1218). Если подвижная станция 130 выполнила процедуры входа в сеть в традиционном режиме работы, то подвижная станция 130 входит в нормальное функционирование с базовой станцией 110 в традиционном режиме работы. В противном случае подвижная станция 130 входит в нормальное функционирование с базовой станцией 110 в продвинутом режиме.
Квалифицированному специалисту в этой области техники из рассмотрения описания и практики настоящего изобретения, описанного в этой заявке, станут очевидны другие варианты осуществления настоящего изобретения. Предполагается, что описание и примеры рассматриваются как характерные, а истинный объем и сущность настоящего изобретения изложены в следующих пунктах формулы изобретения.
Изобретение относится к мобильной связи. Технический результат заключается в обеспечении переключения системы для передачи сеанса действующей связи между усовершенствованной базовой станцией и усовершенствованной подвижной станцией из традиционного режима работы в усовершенствованный режим работы. Обеспечивается первая зона и вторая зона для беспроводной связи; причем первая зона использует первый режим работы, вторая зона использует второй режим работы. Способ предусматривает обеспечение связи с подвижной станцией в первой зоне, использующей первый режим работы; определение, способна ли подвижная станция к функционированию при использовании как первого режима работы, так и второго режима работы; и выполнение, если подвижная станция определена способной к функционированию при использовании как первого, так и второго режима работы, процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы. 4 н. и 22 з.п. ф-лы, 14 ил., 2 табл.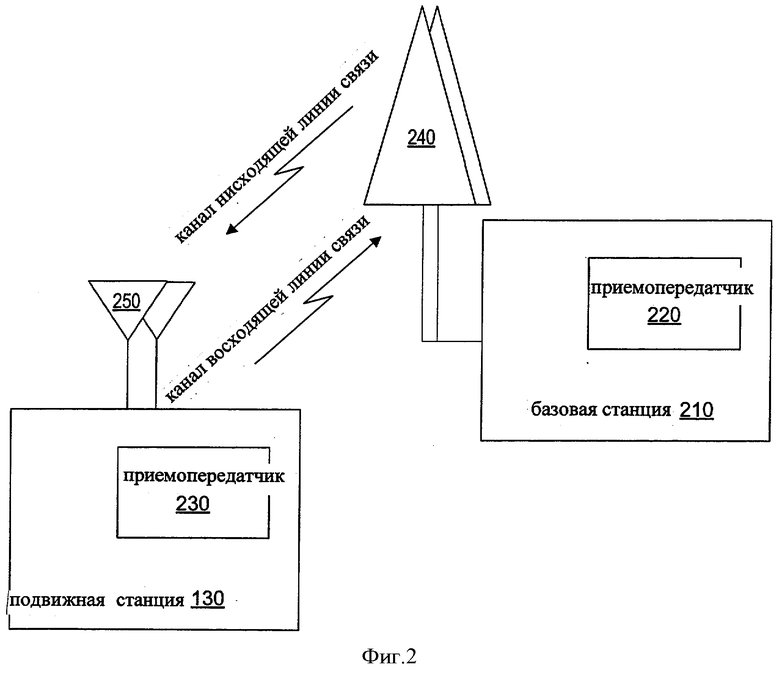
1. Способ функционирования системы с базовыми станциями для беспроводной связи, предусматривающий
обеспечение первой зоны и второй зоны для беспроводной связи;
функционирование первой зоны, использующей первый режим работы;
функционирование второй зоны, использующей второй режим работы;
обеспечение первой базовой станции, способной к функционированию в первом режиме работы;
связь, посредством первой базовой станции, с подвижной станцией в первой зоне, использующей первый режим работы;
определение, посредством первой базовой станции, способна ли подвижная станция к функционированию при использовании, как первого режима работы, так и второго режима работы; и
выполнение, если подвижная станция определена способной к функционированию при использовании, как первого, так и второго режима работы, процедуры коммутации зоны, посредством первой базовой станции, для переключения подвижной станции с первой зоны, использующей первый режим работы, на вторую зону, использующую второй режим работы.
2. Способ по п.1, в котором выполнение процедуры коммутации зоны предусматривает: выполнение процедуры коммутации зоны с использованием способа по принципу «замыкание-разрыв», причем способ по принципу «замыкание-разрыв» делает ввод целевой зоны перед разрывом исходной связи.
3. Способ по п.1, в котором выполнение процедуры коммутации зоны предусматривает: выполнение процедуры коммутации зоны с использованием способа по принципу «разрыв-замыкание», причем способ по принципу «разрыв-замыкание» разрывает исходную связь доступа перед вводом целевой зоны.
4. Способ функционирования подвижной станции способной к обеспечению связи в первом режиме работы и втором режиме работы, предусматривающий:
функционирование в первом режиме работы для обеспечения связи с первой зоной базовой станции;
установление линии связи с базовой станцией, использующей первый режим работы;
определение того, что базовая станция способна к функционированию, как в первом режиме работы, так и во втором режиме работы;
выполнение процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, и
функционирование во втором режиме работы для обеспечения связи со второй зоной базовой станции.
5. Способ по п.4, в котором подвижная станция определяет, что базовая станция способна к функционированию, как в первом режиме работы, так и во втором режиме работы, основываясь на индикаторе зоны из базовой станции.
6. Способ по п.4, в котором выполнение процедуры коммутации зоны предусматривает:
выполнение процедуры коммутации зоны с использованием способа по принципу «замыкание-разрыв», причем способ по принципу «замыкание-разрыв» делает ввод целевой зоны перед разрывом исходной связи.
7. Способ по п.4, в котором выполнение процедуры коммутации зоны предусматривает выполнение процедуры коммутации зоны с использованием способа по принципу «разрыв-замыкание», причем способ по принципу «разрыв-замыкание» разрывает исходную связь доступа перед вводом целевой зоны.
8. Способ по п.1, дополнительно предусматривающий:
обеспечение второй базовой станции, способной к обеспечению одной или более зон и к функционированию, по меньшей мере, во втором режиме работы;
обеспечение, по меньшей мере, одной подвижной станции, способной к функционированию в первом режиме работы и втором режиме работы;
обеспечение связи, посредством подвижной станции с первой базовой станцией или второй базовой станцией; и
выполнение процедуры хэндовера для передачи подвижной станции между первой базовой станцией и второй базовой станцией.
9. Способ по п.8, в котором одна или более зон включает в себя первую зону, функционирующую в первом режиме работы, и вторую зону, функционирующую во втором режиме работы, и выполнение процедуры хэндовера включает в себя:
получение подвижной станцией информации о первой зоне второй базовой станции от первой базовой станции;
выполнение процедуры хэндовера из первой базовой станции к первой зоне второй базовой станции;
получение подвижной станцией информации о второй зоне второй базовой станции от первой зоны второй базовой станции; и
выполнение коммутации зоны из первой зоны второй базовой станции во вторую зону второй базовой станции.
10. Способ по п.8, в котором выполнение процедуры хэндовера предусматривает:
получение подвижной станцией информации из первой базовой станции о выбранной зоне одной или более зон второй базовой станции, причем выбранная зона функционирует во втором режиме работы; и
выполнение процедуры хэндовера из первой базовой станции в зону второй базовой станции.
11. Способ по п.10, в котором одна или более зон включает в себя первую зону, функционирующую в первом режиме работы, и вторую зону, функционирующую во втором режиме работы, а выполнение процедуры хэндовера предусматривает:
получение подвижной станцией из первой базовой станции информации о первой зоне второй базовой станции;
запуск процедуры хэндовера из первой базовой станции в первую зону второй базовой станции;
прием подвижной станцией из первой зоны второй базовой станции информации о второй зоне второй базовой станции до завершения процедуры хэндовера; и
завершение процедуры хэндовера для передачи подвижной станции из первой базовой станции во вторую зону второй базовой станции.
12. Способ по п.10, в котором выполнение процедуры хэндовера предусматривает:
получение подвижной станцией из второй базовой станции информации о первой базовой станции; и
выполнение процедуры хэндовера из выбранной зоны одной или более зон второй базовой станции к первой базовой станции, причем выбранная зона работает во втором режиме работы.
13. Способ по п.10, в котором одна или более зон включают в себя первую зону, функционирующую в первом режиме работы, и вторую зону, функционирующую во втором режиме работы, и в котором выполнение процедуры хэндовера предусматривает:
получение подвижной станцией из второй базовой станции информации о первой базовой станции;
выполнение процедуры хэндовера из второй зоны второй базовой станции первой базовой станции;
до выполнения процедуры хэндовера выполнение коммутации зоны из второй зоны второй базовой станции в первую зону второй базовой станции.
14. Система связи для беспроводной связи, причем система связи содержит первую базовую станцию, содержащую:
одну или более антенн;
приемопередатчик, связанный с одной или более антенн для приема и передачи данных связи от подвижных станций и к подвижным станциям; и процессор, конфигурированный для:
обеспечения первой зоны и второй зоны для беспроводной связи;
функционирования первой зоны, использующей первый режим работы;
функционирования второй зоны, использующей второй режим работы;
функционирования второй зоны, использующей второй режим работы;
обеспечение первой базовой станции, способной к функционированию в первом режиме работы;
обеспечения связи с подвижной станцией в первой зоне, использующей первый режим работы;
определения, способна ли подвижная станция к функционированию с использованием как первого режима работы, так и второго режима работы; и
выполнения процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, если подвижная станция определена способной к функционированию с использованием как первого режима работы, так и второго режима работы.
15. Система связи по п.14, в которой процессор конфигурирован для выполнения процедуры коммутации зоны с использованием способа по принципу «замыкание-разрыв», причем способ по принципу «замыкание-разрыв» делает ввод целевой зоны перед разрывом исходной связи.
16. Система связи по п.14, в которой процессор конфигурирован для выполнения процедуры коммутации зоны с использованием способа по принципу «разрыв-замыкание», причем способ по принципу «разрыв-замыкание» разрывает исходную связь доступа перед вводом целевой зоны.
17. Подвижная станция, способная к обеспечению связи в первом режиме работы и втором режиме работы, содержащая:
одну или более антенн;
приемопередатчик, связанный и одной или более антеннами для приема и передачи данных связи от базовых станций и к базовым станциям; и процессор, конфигурированный для:
функционирования первого режима работы для обеспечения связи с первой зоной базовой станции;
установления линии связи базовой станцией, использующей первый режим работы;
определения, способна ли базовая станция к функционированию с использованием, как первого режима работы, так и второго режима работы;
выполнения процедуры коммутации зоны для переключения подвижной станции из первой зоны, использующей первый режим работы, во вторую зону, использующую второй режим работы, если базовая станция определена способной к функционированию при использовании как первого, так и второго режимов работы; и
функционирования второго режима работы для обеспечения связи со второй зоной базовой станции.
18. Подвижная станция по п.17, в которой процессор конфигурирован для определения, способна ли базовая станция к функционированию как в первом режиме работы, так и во втором режиме работы, основываясь на индикаторе зоны из базовой станции.
19. Подвижная станция по п.17, в которой процессор конфигурирован для выполнения процедуры коммутации зоны при использовании способа по принципу «замыкание-разрыв», причем способ по принципу «замыкание-разрыв» делает ввод целевой зоны перед разрывом исходной связи.
20. Подвижная станция по п.17, в которой процессор конфигурирован для выполнения процедуры коммутации зоны при использовании способа по принципу «разрыв-замыкание», причем способ по принципу «разрыв-замыкание» разрывает исходную связь доступа перед вводом целевой зоны.
21. Система связи по п.14, при этом система связи содержит подвижную станцию, содержащую:
одну или более антенн;
приемопередатчик, связанный с одной или более антеннами для приема и передачи данных связи от базовых станций и к базовым станциям; и
процессор, конфигурированный для:
обеспечения первого режима работы для обеспечения связи с первой базовой станцией, способной к функционированию в первом режиме работы;
обеспечения второго режима работы для обеспечения связи со второй базовой станцией, способной к функционированию в первом режиме работы в первой зоне и к функционированию во втором режиме работы во второй зоне;
обеспечения связи с первой базовой станцией или второй базовой станцией; и
выполнения процедуры хэндовера для передачи между первой базовой и второй базовой станцией.
22. Система связи по п.21, в которой для выполнения процедуры хэндовера процессор конфигурирован для:
получения из первой базовой станции информации о первой зоне второй базовой станции;
выполнения процедуры хэндовера из первой базовой станции в первую зону второй базовой станции;
получения из первой зоны второй базовой станции информации о второй зоне второй базовой станции; и
выполнения коммутации зоны из первой зоны второй базовой станции во вторую зону второй базовой станции.
23. Система связи по п.21, в которой для выполнения процедуры хэндовера процессор конфигурирован для:
получения из первой базовой станции информации о второй зоне второй базовой станции; и
выполнения процедуры хэндовера из первой базовой станции во вторую зону второй базовой станции.
24. Система связи по п.21, в которой для выполнения процедуры хэндовера процессор конфигурирован для:
получения из первой базовой станции информации о первой зоне второй базовой станции;
запуска процедуры хэндовера из первой базовой станции в первую зону второй базовой станции;
приема информации из первой зоны второй базовой станции о второй зоне второй базовой станции до завершения процедуры хэндовера; и
завершения процедуры хэндовера для передачи подвижной станции от первой базовой станции во вторую зону второй базовой станции.
25. Система связи по п.21, в которой для выполнения процедуры хэндовера процессор конфигурирован для:
получения из второй базовой станции информации о первой базовой станции; и
выполнения процедуры хэндовера из второй зоны второй базовой станции в первую базовую станцию.
26. Система связи по п.21, в которой для выполнения процедуры хэндовера процессор дополнительно конфигурирован для:
выполнения коммутации зоны из второй зоны второй базовой станции в первую зону второй базовой станции.
| US 2008176568 A1 24.07.2008 | |||
| Сепарирующе-транспортирующее устройство корнеклубнеуборочной машины | 1982 |
|
SU1102511A1 |
| RU 2007105980 A, 27.08.2008 | |||
| WO 2007011983 A1, 25.01.2007. | |||

