Изобретение относится к шахтному транспорту непрерывного действия, а именно к пластинчатым конвейерам с изгибающейся в горизонтальной плоскости трассой, и может быть использовано для магистральных пластинчатых конвейеров с криволинейными участками трассы в горизонтальной плоскости.
Известен принятый за прототип пластинчатый конвейер, содержащий пластинчатую ленту, состоящую из пластинчатого настила, одноцепного или двухцепного тягового органа и размещенных с каждой стороны пластинчатой ленты сдвоенных ходовых катков с горизонтальной и вертикальной осями с возможностью опирания ходовых катков на соответствующие направляющие, закрепленные на стойках рамы конвейера (Полунин В.Т., Гуленко Г.Н,. Конвейеры для горных предприятий. М.: Недра, 1978 г., с.150-151, рис.4, la).
Однако недостатками известного пластинчатого конвейера являются сложность конструкции, увеличенная высота става, значительное число оснащенных подшипниками вращающихся элементов, увеличенная удельная металлоемкость, что связано с повышенными капитальными и эксплуатационными затратами и снижением надежности его эксплуатации.
Техническим результатом изобретения является упрощение конструкции, снижение капитальных и эксплуатационных затрат и повышение надежности эксплуатации пластинчатого конвейера.
Технический результат достигается тем, что в пластинчатом конвейере, содержащем пластинчатую ленту, состоящую из пластинчатого настила, одноцепного или двухцепного тягового органа и размещенных с каждой стороны пластинчатой ленты ходовых катков с осями с возможностью опирания ходовых катков на направляющие, закрепленные на стойках рамы конвейера, ось каждого ходового катка и опорные поверхности направляющих для ходовых катков на грузонесущей ветви пластинчатой ленты расположены с подъемом в сторону от продольной оси конвейера, а опорные поверхности направляющих для ходовых катков на холостой ветви пластинчатой ленты расположены с наклоном в противоположную сторону под таким же углом, при этом величина угла наклона осей ходовых катков определяется из уравнений:
φ=π/2-arctg(G/Р), Р=2nSmaxsin(α/2), G=g(qпл+q)Rα, qпл=q1+q2+q3, где φ - угол наклона осей ходовых катков, рад; Р - боковое усилие, приложенное к грузонесущей ветви пластинчатой ленты на криволинейном участке трассы, Н; G - вес криволинейного участка грузонесущей ветви пластинчатой ленты с размещенным на ней транспортируемым грузом, Н; n - число цепей тягового органа; Smax - максимальное натяжение одной цепи тягового органа в зоне криволинейного участка трассы, Н; α - угол поворота трассы в горизонтальной плоскости на криволинейном участке, рад; R - радиус криволинейного участка конвейера, м; qпл, q1, q2, q3, q - линейная масса соответственно пластинчатой ленты, пластинчатого настила, цепного тягового органа, ходовых катков и транспортируемого груза, кг/м, а величина угла наклона опорных поверхностей направляющих для ходовых катков принимается увеличенной по сравнению с углом φ наклона их осей с учетом конусной формы ходовых катков.
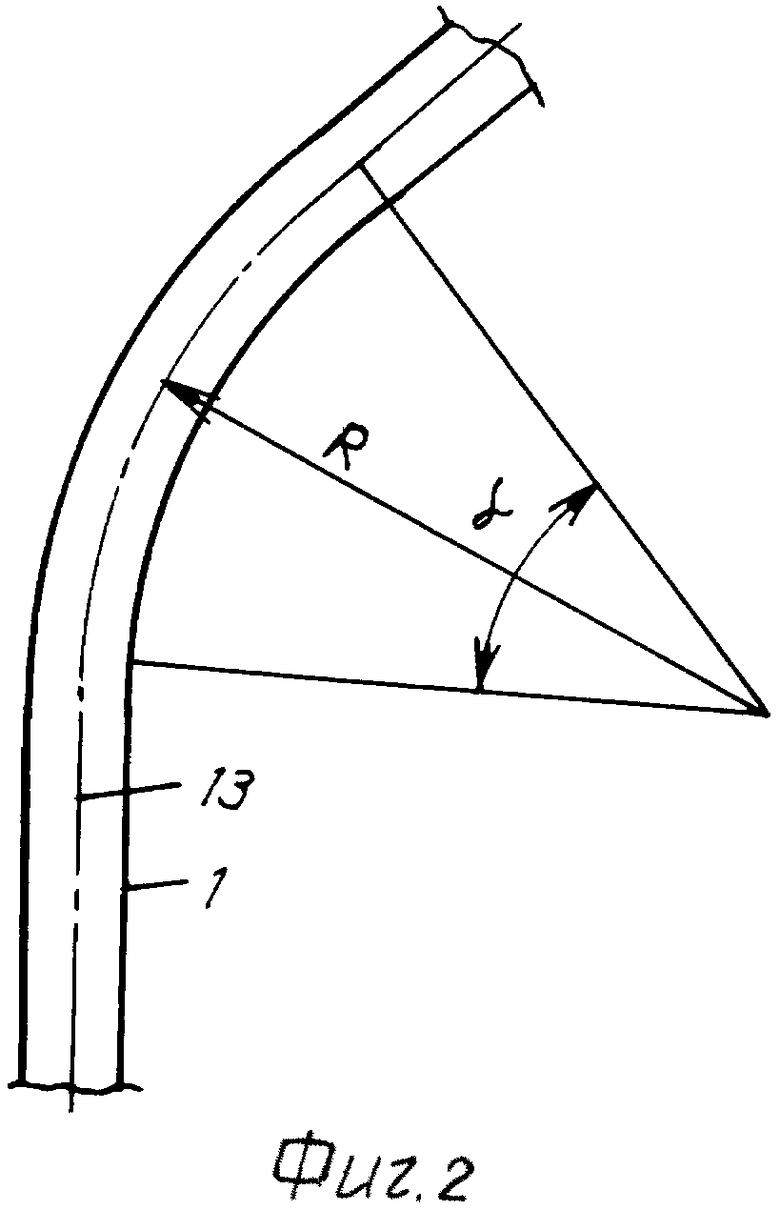
Пластинчатый конвейер представлен на фиг.1 - поперечный разрез, на фиг.2 - план конвейера на криволинейном участке трассы.
Пластинчатый конвейер содержит пластинчатую ленту, состоящую из пластинчатого настила 1, одноцепного или двухцепного тягового органа 2 и размещенных с каждой стороны пластинчатой ленты ходовых катков 3 и 4 с осями 5 и 6 с возможностью опирания ходовых катков 3 и 4 на направляющие 7 и 8 грузонесущей ветви и направляющие 9 и 10 холостой ветви. Направляющие 7, 8 и 9, 10 закреплены на стойках 11 и 12 рамы конвейера. Ось 5, 6 каждого ходового катка 3, 4 и опорные поверхности направляющих 7, 8 для ходовых катков 3, 4 на грузонесущей ветви пластинчатой ленты расположены с подъемом в сторону от продольной оси 13 конвейера, а опорные поверхности направляющих 9 и 10 для ходовых катков 3, 4 на холостой ветви пластинчатой ленты расположены с наклоном в противоположную сторону под таким же углом. При этом величина угла наклона осей ходовых катков определяется из уравнений:
φ=π/2-arctg(G/P), Р=2nSmaxsin(α/2), G=g(qпл+q)Rα, qпл=q1+q2+qз, где φ - угол наклона осей ходовых катков 3 и 4, рад; Р - боковое усилие, приложенное к грузонесущей ветви пластинчатой ленты на криволинейном участке трассы, Н; G - вес криволинейного участка грузонесущей ветви пластинчатой ленты с размещенным на ней транспортируемым грузом 14, Н; n - число цепей тягового органа; Smax - максимальное натяжение одной цепи тягового органа 2 в зоне криволинейного участка трассы, Н; α - угол поворота трассы в горизонтальной плоскости на криволинейном участке, рад; R - радиус криволинейного участка конвейера, м; qпл, q1, q2, q3, q - линейная масса соответственно пластинчатой ленты, пластинчатого настила, цепного тягового органа, ходовых катков и транспортируемого груза, кг/м. Величина угла наклона опорных поверхностей направляющих 7, 8 и 9, 10 для ходовых катков 3 и 4 принимается увеличенной по сравнению с углом φ наклона их осей с учетом конусной формы ходовых катков 3 и 4.
Конвейер действует следующим образом. При движении пластинчатой ленты (1-6) на прямолинейном участке трассы на ходовые катки 3, 4 действует только весовая нагрузка от веса пластинчатой ленты с размещенной на пластинчатом настиле 1 транспортируемым грузом 14. При этом нормальная составляющая от весовой нагрузки на каждый ходовой каток 3 и 4 несколько снижена по сравнению с горизонтальным расположением их осей, но при соответствующей осевой нагрузке. Наклонное расположение осей 5 и 6 ходовых катков 3 и 4 улучшает также центрирование пластинчатой ленты с исключением ее поперечного смещения. При движении пластинчатой ленты на криволинейном участке трассы (фиг.2) на ходовые катки 3 и 4 помимо веса G пластинчатой ленты с транспортируемым грузом 14 действует боковое усилие Р, вызванное натяжением цепного тягового органа 2. Благодаря наклонному расположению осей 5, 6 ходовых катков 3, 4 под рекомендуемым углом φ и соответствующему наклону направляющих 7, 8 вектор равнодействующей усилий G и Р направлен нормально к осям 5, 6 ходовых катков 3, 4, что исключает возникновение поперечного смещающего усилия. Аналогичным образом обеспечивается центрирование ходовых катков 3 и 4 на холостой ветви конвейера.
Таким образом, отличительные признаки изобретения обеспечивают существенное упрощение конструкции пластинчатого конвейера, уменьшение его габаритов за счет исключения вертикальных ходовых катков, удельной металлоемкости и энергоемкости при снижении капитальных и эксплуатационных затрат и повышении надежности эксплуатации пластинчатого конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРУТОНАКЛОННЫЙ ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2012 |
|
RU2494029C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2006 |
|
RU2312051C1 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2006 |
|
RU2320525C1 |
| КАРКАСНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2232707C2 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2009 |
|
RU2425224C1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ КОНВЕЙЕР | 2010 |
|
RU2466076C2 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2328433C1 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2011 |
|
RU2473811C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЛЕНТОЧНОГО КОНВЕЙЕРА | 2011 |
|
RU2472690C1 |
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 2007 |
|
RU2340529C1 |
Пластинчатый конвейер содержит пластинчатую ленту, состоящую из настила (1), одноцепного или двухцепного тягового органа (2) и размещенных с каждой стороны пластинчатой ленты ходовых катков (3, 4) с осями (5, 6), опирающихся на направляющие (7, 8) грузонесущей ветви ленты и направляющие (9, 10) холостой ветви ленты. Ось каждого ходового катка и опорные поверхности направляющих грузонесущей ветви ленты расположены с подъемом в сторону от продольной оси (13) конвейера. Опорные поверхности направляющих холостой ветви ленты расположены с наклоном в противоположную сторону под таким же углом. Упрощается конструкция конвейера, уменьшаются его габариты, металлоемкость и энергоемкость, повышается его надежность. 2 ил.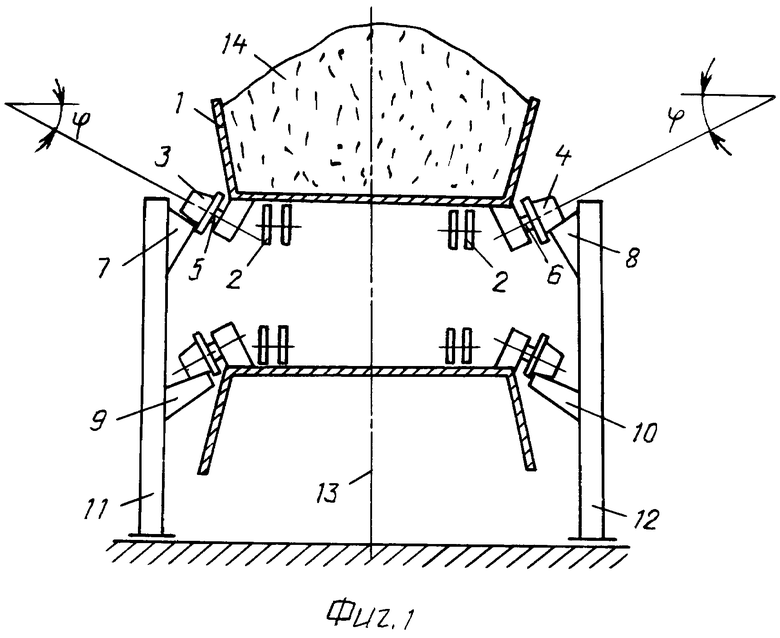
Пластинчатый конвейер, содержащий пластинчатую ленту, состоящую из пластинчатого настила, одноцепного или двухцепного тягового органа и размещенных с каждой стороны пластинчатой ленты ходовых катков с осями с возможностью опирания ходовых катков на направляющие, закрепленные на стойках рамы конвейера, отличающийся тем, что ось каждого ходового катка и опорные поверхности направляющих для ходовых катков на грузонесущей ветви пластинчатой ленты расположены с подъемом в сторону от продольной оси конвейера, а опорные поверхности направляющих для ходовых катков на холостой ветви пластинчатой ленты расположены с наклоном в противоположную сторону под таким же углом, при этом величина угла наклона осей ходовых катков определяется из уравнений:
φ=π/2-arctg(G/Р), Р=2nSmaxsin(α/2), G=g(qпл+q)Rα, qпл=q1+q2+q3, где φ - угол наклона осей ходовых катков, рад; Р - боковое усилие, приложенное к грузонесущей ветви пластинчатой ленты на криволинейном участке трассы, Н; G - вес криволинейного участка грузонесущей ветви пластинчатой ленты с размещенным на ней транспортируемым грузом, Н; n - число цепей тягового органа; Smax - максимальное натяжение одной цепи тягового органа в зоне криволинейного участка трассы, Н; α - угол поворота трассы в горизонтальной плоскости на криволинейном участке, рад; R - радиус криволинейного участка конвейера, м; qпл, q1, q2, q3, q - линейная масса соответственно пластинчатой ленты, пластинчатого настила, цепного тягового органа, ходовых катков и транспортируемого груза, кг/м, а величина угла наклона опорных поверхностей направляющих для ходовых катков принимается увеличенной по сравнению с углом φ наклона их осей с учетом конусной формы ходовых катков.
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2006 |
|
RU2320525C1 |
| ПЕРЕДВИЖНОЙ ИЗГИБАЮЩИЙСЯ КОНВЕЙЕР | 0 |
|
SU262824A1 |
| CN 101397086 B, 09.11.2011. | |||

