ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к подводным измерительным системам. Кроме того, изобретение относится к способам контроля подводных областей, используя вышеупомянутые подводные измерительные системы. Кроме того, настоящее изобретение относится к конструкциям датчиков для осуществления таких способов. Дополнительно изобретение касается программных продуктов, записанных на носителях информации и выполняемых на вычислительных аппаратных средствах для осуществления таких способов.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Хорошо известны подводные суда, такие как субмарины. Совсем недавно для осуществления контроля рыбных ресурсов для выращиваемого на фермах лосося и для того, чтобы осматривать погруженные конструкции при глубоководной разведке нефти, использовались минисубмарины. Контроль и осмотр часто выполняют с использованием оптических камер для захвата изображений подводных областей, а также с использованием активного гидролокаторного оборудования излучения звуковой энергии и получения соответствующих отражений звука от погруженных конструкций.
Однако такие способы контроля и осмотра не обеспечивают возможность обнаружения определенных типов дефектов в конструкциях, особенно таких, которые имеют электрическую природу. Совсем недавно стали чаще использоваться подводные кабели для связи по электропитанию между электрическими сетями, отделенными областями воды, например между южной Швецией и датским островом Съелэнд, а также через Ла-Манш между Англией и Францией. Кроме того, подводные электрические кабели используются для обеспечения погруженного оборудования мощностью во время разведки и добычи нефти и газа. Кроме того, телекоммуникационные линии связи, включая оптические волоконные волноводы, часто содержат электрические линии питания для обеспечения легированных эрбием волоконнооптических усилителей (EDFAs) мощностью, чтобы обеспечить периодическую регенерацию оптических сигналов для компенсации оптического ослабления, происходящего вдоль оптических волоконных волноводов.
Подъем подводного кабеля для ремонта часто является чрезвычайно дорогостоящей операцией, и поэтому имеется большая потребность в обеспечении возможности обнаружения местоположений, в которых погружные кабели и электрооборудование являются потенциально дефектными или имеют проявившиеся неисправности. Оптический осмотр часто обеспечивает неадекватный подход для идентификации и ограничения дефектов и неисправностей.
В опубликованной международной заявке на патент №03/104844 (PCT/US 03/18522) описана система для картографирования электрической проводимости ложа океана. Система содержит несколько блоков регистрации данных. Каждый блок представляет собой узел, выполненный с возможностью развертывания в местоположении на ложе океана для измерения горизонтальных электрических и магнитных полей. Из узла блока вертикально проходит, по существу, вертикально ориентированный жесткий кронштейн, который содержит пару вертикально размещенных электродов, расположенных на кронштейне с созданием вертикально ориентированной дипольной антенны. Электроды кронштейна находятся в электрическом сообщении с усилителем, расположенным внутри узла, который создает усиленный сигнал, который затем передается процессору регистрации данных, также расположенному внутри узла. Процессор собирает временные зависимости усиленного электрического поля и магнитных сигналов в течение заданного промежутка времени.
Кроме того, в опубликованном патенте США №6867596 раскрыт способ обнаружения пробоев в изоляции и соответствующих замыканий на землю в проложенном в грунте кабеле; тестирующий сигнал прикладывают к кабелю, сигнал обнаруживают с использованием зонда дифференциального напряжения, размещенного в проводящей среде вблизи кабеля. Зонд дифференциального напряжения создает полученный сигнал, который обрабатывают в цепи обработки сигнала, выполненной с возможностью декомпозиции элементов полученного сигнала, соответствующих тестирующему сигналу. Разложенные элементы затем подвергают сравнению фазы, чтобы определить направление тока утечки, связанной с замыканием на землю.
Агрессивные водные среды могут подвергаться значительным потокам воды и другим пертурбациям, которые делают используемые до настоящего времени способы неподходящими. Таким образом, возникает сложная техническая проблема обнаружения коротких замыканий в электрической цепи в агрессивных водных средах.
Обычный способ тестирования на замыкание на землю в сетях распределения электропитания состоит в том, чтобы выполнять тестирование изоляции с помощью мегометра. При использовании мегометра сигнал с высоким потенциалом прикладывают к проводнику, окруженному изолятором, при этом сопротивление изолятора измеряют в ответ на приложенный сигнал. Выполнение тестирования мегометром не выполнимо в ситуации, когда необходимо обнаружить замыкание на землю на электрически плавающей обмотке ротора подводного трансформатора. Не существует никакого известного современного способа, который может обнаружить замыкание на землю, связанное с такой обмоткой ротора подводного трансформатора, без специального оборудования, встроенного в трансформатор, чтобы обнаружить возникновение любых таких неисправностей. Это специальное оборудование может иметь увеличенную сложность установки и стоимость и представлять собой не самое оптимальное решение. Передача тестирующего сигнала в цепь трансформатора не является удовлетворительной, когда вторичная сторона трансформатора помещена на морское дно и находится под напряжением.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы обеспечить систему, выполненную с возможностью обнаружения коротких замыканий в электрической цепи в подводной области.
Дополнительная цель изобретения состоит в том, чтобы обеспечить способ использования системы для обнаружения коротких замыканий в электрической цепи в подводной области.
В соответствии с первым аспектом изобретения предусмотрена подводная измерительная система, как заявлено в приложенном пункте 1 формулы изобретения: предложена подводная измерительная система для осуществления контроля подводной области, содержащая сенсорный узел, выполненный с возможностью измерения по меньшей мере одной физической переменной в этой области, для генерации по меньшей мере одного соответствующего сигнала сенсора, и устройство обработки данных, предназначенное для обработки по меньшей мере одного сигнала сенсора с обеспечением создания обработанных данных для представления и/или регистрации, отличающаяся тем, что сенсорный узел содержит один или несколько датчиков напряжения, выполненных с возможностью измерения электрических полей, присутствующих в указанной подводной области, и обеспечения информации в указанном по меньшей мере одном сигнале, характеризующем электрические поля; при этом сенсорный узел содержит один или несколько гидроакустических звукоприемников, выполненных с возможностью получения звуковой энергии, созданной в подводной области, и включения соответствующей информации в указанный по меньшей мере один сигнал датчика для сообщения устройству обработки данных.
Преимущество изобретения заключается в том, что датчики напряжения выполнены с возможностью обнаружения электрических полей, созданных короткими замыканиями в электрической цепи в подводной области, причем указанный один или несколько гидроакустических звукоприемников выполнены с возможностью обнаружения соответствующих акустических сигналов, соответствующих таким коротким замыканиям, обеспечивая, таким образом, более достоверную и точную идентификацию таких коротких замыканий.
При использовании гидроакустических звукоприемников могут быть обеспечены подтверждающие сигналы, которые обеспечивают более достоверную идентификацию одного или нескольких коротких замыканий.
Дополнительно, в подводной измерительной системе указанный один или несколько гидроакустических звукоприемников могут быть выполнены в виде решетки гидроакустических звукоприемников, чьи характеристики измерения звука при работе имеют одну или несколько предпочтительных направлений чувствительности для того, чтобы обеспечить возможность определения направления источника звуковой энергии. Такие предпочтительные направления чувствительности обеспечивают, при использовании настоящей системы, возможность выборочного исключения из измерений паразитного шума, приходящего с других направлений. Кроме того, указанный один или несколько гидроакустических звукоприемников составляют при работе фазовую решетку гидроакустических звукоприемников, чьи характеристики полярной чувствительности могут управляться с помощью электроники из устройства обработки данных.
В подводной измерительной системе указанный один или несколько датчиков напряжения может быть выполнен в виде одной пары или нескольких пар электродов, выполненных с возможностью обеспечения дифференциального измерения напряжения в области. Использование такого дифференциального измерения напряжения обеспечивает возможность измерения величины электрического поля, исключая, таким образом, любые статические смещения напряжения, которые могут потенциально влиять на указанную одну или несколько пар электродов.
Кроме того, указанная одна или несколько пар электродов могут быть выполнены с возможностью осуществления дифференциального измерения потенциала в нескольких взаимно ортогональных направлений. Такая особенность измерения обеспечивает возможность идентификации пространственного направления короткого замыкания с использованием системы.
Указанная одна или несколько пар электродов могут быть изготовлены из инертного материала, который не является химически активным с соленой водой. Такая инертность электродов помогает избежать генерации паразитных сигналов в результате химических реакций электродов с текучей средой, имеющейся в подводной области.
Кроме того, указанная одна или несколько пар электродов могут быть изготовлены из углеродистых волокон или графита. Более того, углеродистое волокно или графит могут быть пористыми по отношению к текучей среде, имеющейся в подводной области.
Указанная одна или несколько пар электродов могут быть выполнены таким образом, что их электроды снабжены экранами, защищающими от потока, содержащими также монтажные окна, которые обеспечивают возможность электрического присоединения электродов к подводной области, уменьшая скорость потока воды через электроды во время работы.
В подводной измерительной системе устройство обработки данных может быть выполнено с возможностью анализа указанного по меньшей мере одного сигнала датчика для определения направления, в котором электрическое поле при данной частоте сигнала ориентировано для того, чтобы помочь в определении местоположения источника электрического поля в пределах подводной области. Такой анализ направления обеспечивает возможность более быстрой и более достоверной идентификации места расположения короткого замыкания в электрической цепи.
В подводной измерительной системе сенсорный узел может содержать один или несколько химических датчиков, выполненных с возможностью обнаружения одного или нескольких химических соединений или элементов, присутствующих в подводной области, и включения соответствующей информации в указанный по меньшей мере один сигнал датчика для сообщения устройству обработки данных, причем указанная информация указывает на измеренное одно или несколько химических соединений или элементов. Измеряемые химические соединения, присутствующие в подводной области, могут обеспечивать возможность более достоверного синергетического обнаружения определенных типов подводных неисправностей.
В подводной измерительной системе устройство обработки данных может быть выполнено с возможностью вычисления одного или нескольких частотных спектров, характеризующих указанный по меньшей мере один сигнал датчика, и отображения и/или регистрации указанного одного или нескольких частотных спектров. Устройство обработки данных может быть выполнено с возможностью сравнения указанного одного или нескольких частотных спектров с одним или несколькими спектральными эталонами для того, чтобы идентифицировать одно или несколько событий, происходящих в подводной области. Устройство обработки данных может быть выполнено с возможностью сравнения одной или нескольких гармоник одного или нескольких сигналов, созданных указанным одним или несколькими гидроакустическими звукоприемниками, с одной или несколькими гармониками одного или нескольких сигналов, созданных указанным одним или несколькими датчиками напряжения для того, чтобы идентифицировать между ними различия, необходимых для получения характеристик подводной области. Устройство обработки данных может быть выполнено с возможностью сравнения указанного одного или нескольких сигналов датчика и/или указанного одного или нескольких частотных спектров с одним из нескольких пороговых пределов для идентификации возникновения одного или нескольких событий в подводной области.
В подводной измерительной системе сенсорный узел может содержать инерционный датчик для определения ориентации и/или положения сенсорного узла, причем инерционный датчик сообщается с устройством обработки данных. Путем измерения инерционного положения сенсорного узла и используя сигналы датчика, созданные сенсорным узлом, чтобы вывести сенсорный узел в местоположение вблизи короткого замыкания в электрической цепи, пространственное местоположение короткого замыкания может быть точно определено из случайного положения зонда, расположенного рядом с коротким замыканием.
Подводная измерительная система может быть выполнена с возможностью осуществления пассивного обнаружения одного или нескольких коротких замыканий в электрической цепи в подводной области.
При применении подводной измерительной системы сенсорный узел может быть установлен на подводном сенсорном узле, соединенном посредством коммуникационной связи с вычислительными аппаратными средствами. Коммуникационная связь может представлять собой гибкое разъемное соединение, обеспечивающее возможность перемещения сенсорного узла в пределах подводной области.
В подводной измерительной системе устройство обработки данных может быть распределено между сенсорным узлом и вычислительными аппаратными средствами.
В соответствии со вторым аспектом изобретения предусмотрен способ, как заявлено в приложенном пункте 20 формулы изобретения: предложен способ осуществления контроля подводной области, используя подводную измерительную систему, которая содержит сенсорный узел, коммуникационно соединенный с устройством обработки данных, отличающийся тем, что способ включает:
(a) использование одного или нескольких датчиков напряжения сенсорного узла для измерения электрических полей, присутствующих в подводной области, которые генерируют по меньшей мере один сигнал датчика, содержащий информацию, указывающую на электрические поля;
(b) использование одного или нескольких гидроакустических звукоприемников сенсорного узла для получения звуковой энергии, созданной в подводной области, и для включения соответствующей информации в указанный по меньшей мере один сигнал датчика для сообщения его устройству обработки данных; и
(с) обработку указанного по меньшей мере одного сигнала датчика в устройстве обработки данных, чтобы обеспечить возможность осуществления контроля подводной области.
При выполнении способа указанный один или несколько гидроакустических звукоприемников может быть выполнен в виде решетки гидроакустических звукоприемников, чьи характеристика измерения звука при работе имеют один или несколько предпочтительных направлений чувствительности для обеспечения возможности определения направления источника звуковой энергии.
Способ может содержать этапы:
(a) использования одного или нескольких гидроакустических звукоприемников, как фазовую решетку гидроакустических звукоприемников; и
(b) управления с помощью электроники характеристиками полярной чувствительности фазовой решетки гидроакустических звукоприемников из устройства обработки данных.
При осуществлении способа указанный один или несколько датчиков напряжения могут быть выполнены в виде одной или нескольких пар электродов, выполненных с возможностью обеспечения дифференциального измерения напряжения в области. Способ может включать этап обеспечения дифференциальных измерений в нескольких взаимно ортогональных направлений, используя указанную одну или несколько пар электродов.
Способ может также включать этап изготовления одной или нескольких пар электродов из инертного материала, который не является химически реактивным с соленой водой. Указанная одна или несколько пар электродов может быть изготовлена из углеродистого волокна или графита.
При осуществлении способа указанная одна или несколько пар электродов может быть выполнена таким образом, что его электроды снабжены экранами потока, содержащими монтажные отверстия, которые обеспечивают возможность электрического соединения электродов к подводной области, уменьшая при работе скорость потока воды по электродам.
Способ может включать этап использования устройства обработки данных для осуществления анализа указанного по меньшей мере одного сигнала датчика, чтобы определять направление, в котором ориентировано электрическое поле на данной частоте сигнала для того, чтобы помочь в определении местоположения источника электрического поля в пределах подводной области.
Способ может включать этапы:
(a) обнаружения с использованием одного или нескольких химических датчиков, включенных в подводную измерительную систему, одного или нескольких химических соединений или элементов, имеющихся в подводной области; и
(b) включения соответствующей информации в указанный по меньшей мере один сигнал датчика для сообщения устройству обработки данных, причем указанная информация является указанием на измеренное одно или несколько химических соединений или химических веществ.
Способ может включать этапы:
(a) использования устройства обработки данных для вычисления одного или нескольких частотных спектров, характеризующих указанный по меньшей мере один сигнал датчика; и
(b) отображения и/или регистрации указанного одного или нескольких частотных спектров.
Способ может также включать этап сравнения в устройстве обработки данных одной или нескольких гармоник одного или нескольких сигналов, созданных указанным одним или несколькими гидроакустическими звукоприемниками, с одной или несколькими гармониками одного или нескольких сигналов, созданных указанным одним или несколькими датчиками напряжения, для идентификации различия между ними для характеризации подводной области.
Способ может включать этап сравнения одного или нескольких сигналов, сгенерированных указанным одним или несколькими гидроакустическими звукоприемниками с указанным одним или несколькими сигналами, сгенерированными указанным одним или несколькими датчиками напряжения, для осуществления контроля за проскальзыванием, происходящим в одной или нескольких ротационных индукционных машинах.
Способ может также включать этап использования устройства обработки данных для сравнения указанного одного или нескольких частотных спектров с одним или несколькими спектральными эталонами, чтобы идентифицировать одно или несколько событий, происходящих в подводной области. Также способ может включать этап сравнения, с использованием устройства обработки данных, указанного одного или нескольких сигналов датчика и/или указанного одного или нескольких частотных спектров с одним из нескольких пороговых пределов, чтобы идентифицировать возникновение одного или нескольких событий в подводной области.
Способ может включать этап использования инерционного датчика сенсорного узла для определения ориентации и/или положения сенсорного узла, причем инерционный датчик коммуникационно соединен с устройством обработки данных.
Способ может включать выполнение пассивного обнаружения одного или нескольких коротких замыканий в электрической цепи в подводной области.
В соответствии с третьим аспектом изобретения предложен программный продукт, записанный на носителе информации, причем программное обеспечение предусмотрено с возможностью выполнения на вычислительных аппаратных средствах для осуществления способа в соответствии со вторым аспектом изобретения.
В соответствии с четвертым аспектом настоящего изобретения предложена подводная измерительная система для осуществления контроля подводной области, которая содержит сенсорный узел, выполненный с возможностью измерения по меньшей мере одной физической переменной в указанной области для генерации по меньшей мере одного соответствующего сигнала датчика, и устройство обработки данных, предназначенное для обработки указанного по меньшей мере одного сигнала датчика для создания обработанных данных для представления и/или регистрации, отличающаяся тем, что сенсорный узел содержит один или несколько датчиков напряжения, выполненных с возможностью измерения электрических полей, присутствующих в подводной области и обеспечения информации в указанном по меньшей мере одном сигнале, указывающем на наличие электрических полей.
Преимущество изобретения заключается в том, что датчики напряжения выполнены с возможностью обнаружения электрических полей, созданных короткими замыканиями в электрической цепи в подводной области.
В подводной измерительной системе, указанная одна или несколько пар электродов могут быть выполнены таким образом, что их электроды снабжены экранами потока, содержащими монтажные отверстия, которые обеспечивают возможность электрического соединения электродов к подводной области, уменьшая при работе скорость потока воды поверх электродов. Использование экранов потока позволяет сократить паразитные сигналы, генерируемые у указанной одной или нескольких пар электродов, как результат наличия текучей среды в подводной области, текущей по электродам, улучшая, тем самым, качество измерения путем уменьшения паразитных источников шума.
Для того чтобы уменьшить влияние внешней интерференции и, таким образом, получить усиленное качество измерения, используя подводную измерительную систему, устройство обработки данных может быть распределено между зондом и вычислительными аппаратными средствами. Переведение сигналов в цифровую форму и выполнение предварительной обработки сигналов около сенсорного узла обеспечивает увеличение ошибкоустойчивости системы к интерференции и снижение риска потери информационного содержания в указанном одном или нескольких сигналов.
В соответствии с пятым аспектом изобретения предложен способ осуществления контроля подводной области с использованием подводной измерительной системы, которая содержит сенсорный узел, соединенный с возможностью сообщения с устройством обработки данных, отличающийся тем, что способ включает этапы:
(a) использования одного или нескольких датчиков напряжения сенсорного узла для измерения электрических полей, присутствующих в подводной области для генерации по меньшей мере одного сигнала датчика, содержащего информацию, указывающую на наличие электрических полей; и
(b) обработку указанного по меньшей мере одного сигнала датчика в устройстве обработки данных для обеспечения возможности осуществления контроля подводной области.
Признаки изобретения могут быть объединены в любой комбинации, не отступая от объема изобретения, как определено в приложенной формуле изобретения.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь исключительно посредством примера будут описаны варианты выполнения настоящего изобретения, в отношении следующих чертежей, на которых:
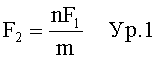
Фиг.1 представляет собой иллюстрацию подводной измерительной системы, выполненной в соответствии с настоящим изобретением, в водной среде в области подводной электрической установки;
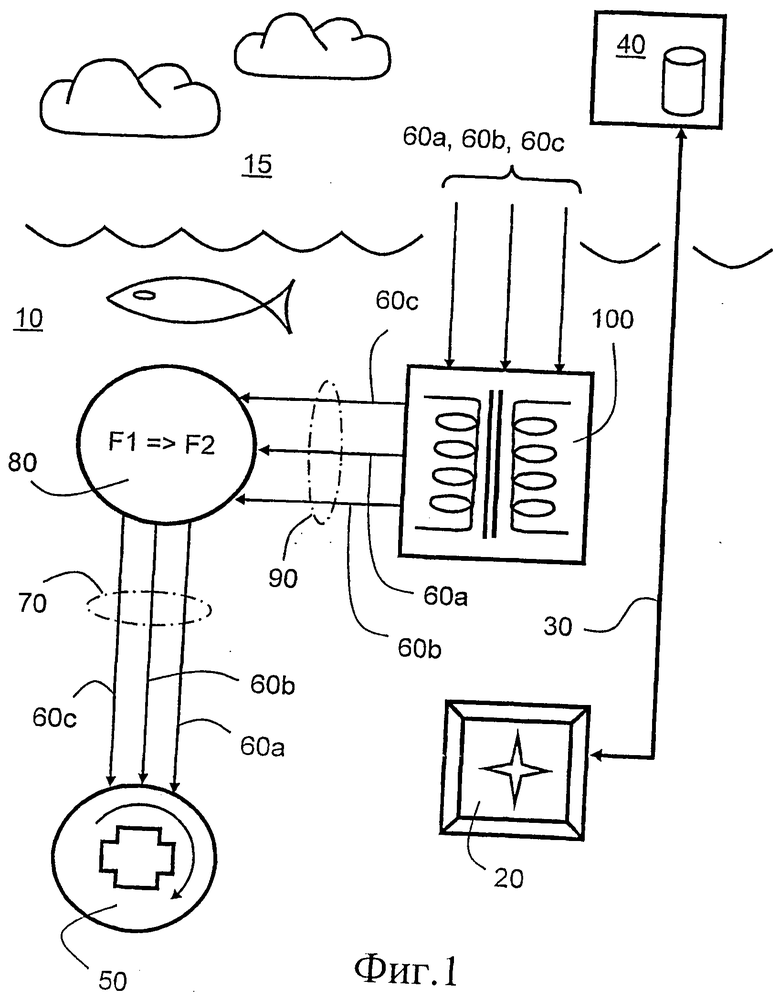
Фиг.2 представляет собой схематическую иллюстрацию подводного сенсорного узла системы, показанной на Фиг.1;
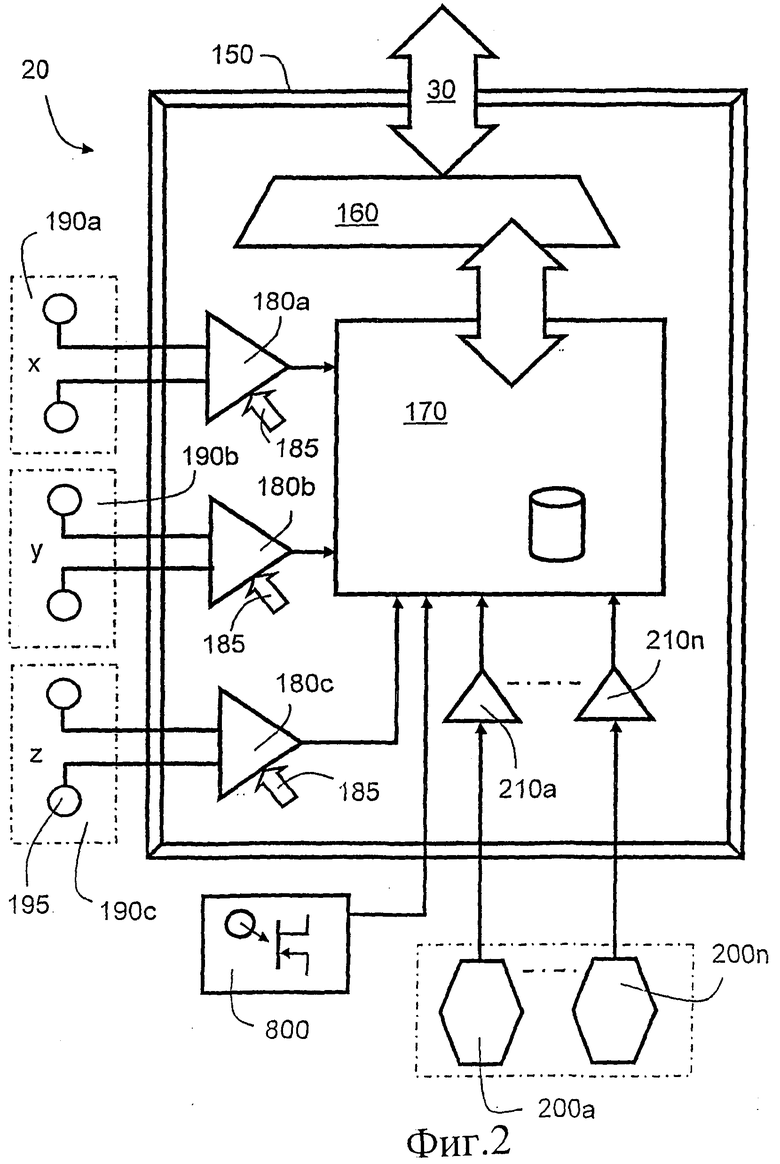
Фиг.3 и 4 представляют собой иллюстрации применения сенсорного узла, изображенного на Фиг.2;
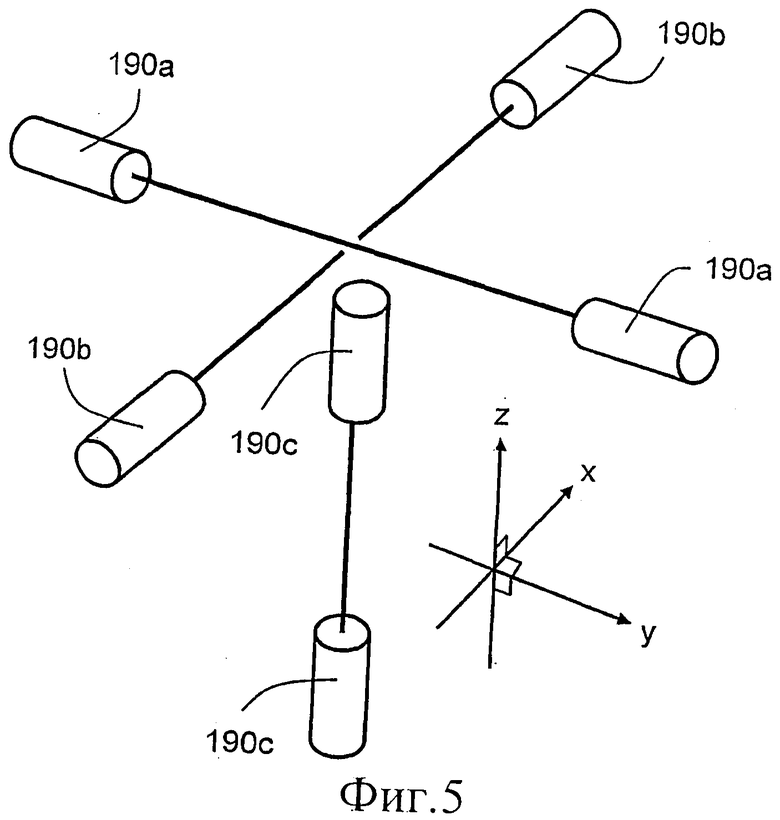
Фиг.5 представляет собой конструкцию электрического датчика, используемого в сенсорном узле, изображенном на Фиг.3 и 4;
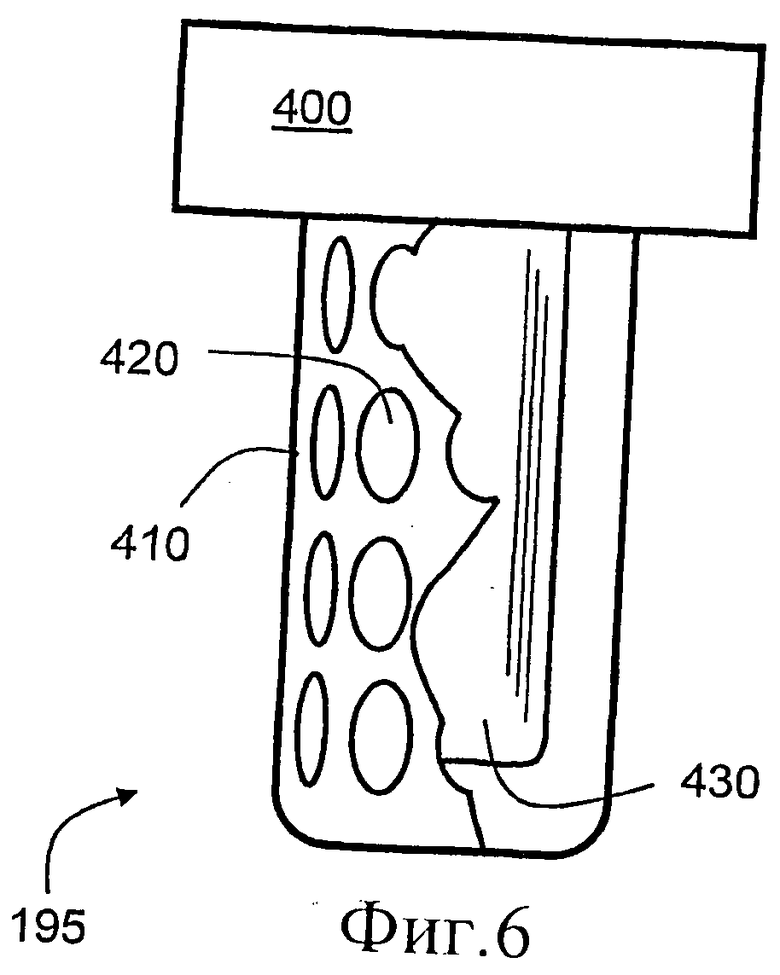
Фиг.6 представляет собой вид электрического датчика с частичным разрезом конструкции электрического датчика, изображенной на Фиг.5;
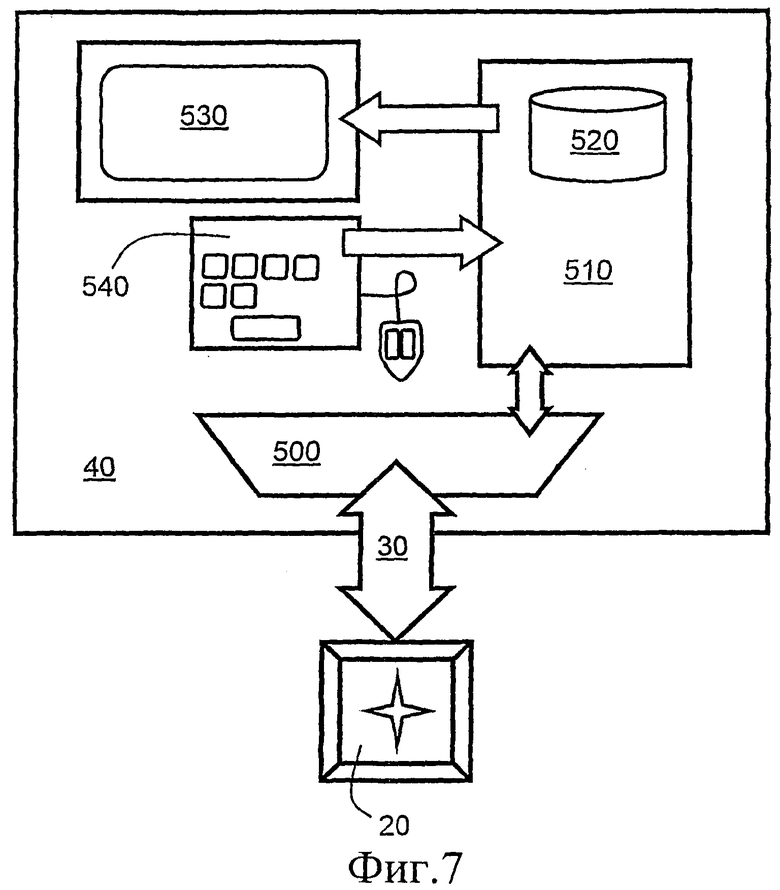
Фиг.7 представляет собой схематическую иллюстрацию устройства обработки данных для использования с подводным сенсорным узлом, изображенным на Фиг.2;
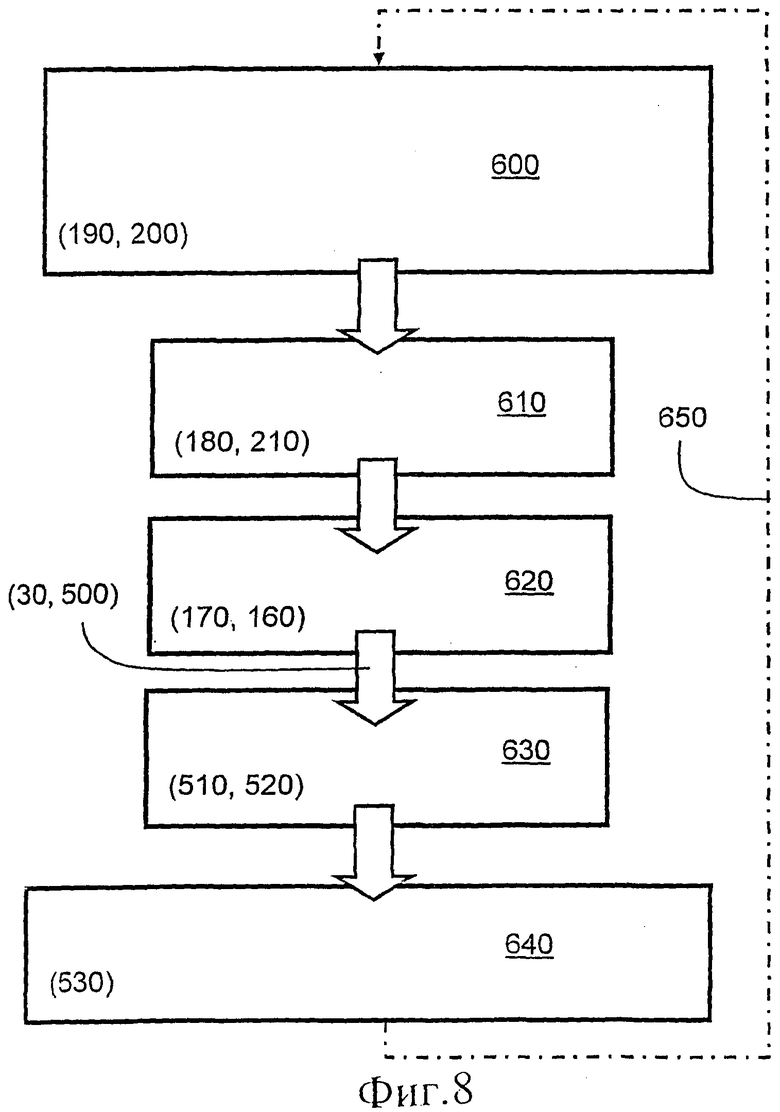
Фиг.8 представляет собой блок-схему, представляющую собой операции по обработке данных, выполняемых в подводной измерительной системе;
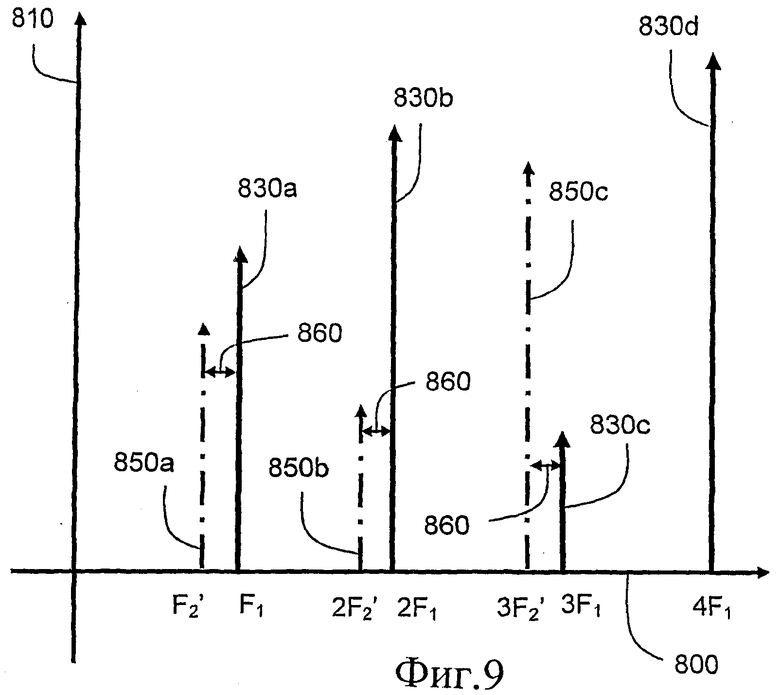
Фиг.9 представляет собой график, иллюстрирующий гармонические элементы сигналов, полученных с использованием подводной измерительной системы, изображенной на Фиг.1; и
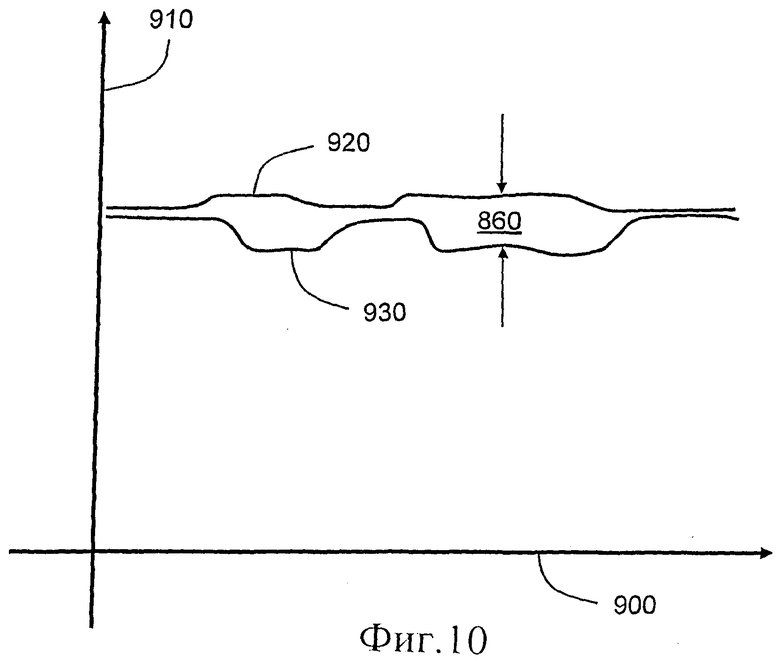
Фиг.10 представляет собой иллюстрацию временной зависимости сигналов, сгенерированных подводной измерительной системой, изображенной на Фиг.1.
На сопровождающих диаграммах подчеркнутые номера позиций используются для обозначения элемента, сверху которого или рядом с которым этот подчеркнутый номер позиции расположен. Неподчеркнутый номер позиции относится к элементу, обозначенному линией, связывающей неподчеркнутый номер позиции и элемент. Когда номер позиции не подчеркнут и сопровождается соответствующей стрелкой, неподчеркнутый номер позиции используется для общего обозначения элемента, на который указывает стрелка.
ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
В связи с операциями, осуществляемыми в морской среде, где необходимо снабжение электроэнергией, например, для того, чтобы управлять электрическими насосами и подобным оборудованием, сбой или другая неисправность в электропитании могут привести к критической ситуации или повреждению в таких операциях. Выгодно иметь доступное устройство для обнаружения и предупреждения потенциальных неисправностей на раннем этапе, чтобы избежать последствий возможных неисправностей и связанного с ними повреждения. При производстве нефти и газа, где высокопотенциальное распределение электроэнергии является существенным, ввиду величины потоков электроэнергии, безопасность имеет первостепенную важность. В ситуациях, в которых оборудование установлено на морском дне, например, на глубинах на многие километры, невозможно использовать обычную технологию наблюдения, чтобы идентифицировать потенциальные неисправности. Последствия утечек электрического тока являются более серьезными, чем в наземных системах, потому что утечка электрического тока в проводящей подводной окружающей среде может привести к короткому замыканию всего электрооборудования.
Вкратце, настоящее изобретение относится к подводной измерительной системе, выполненной с возможностью выполнения пассивных измерений. Такая работа имеет то преимущество, что нет необходимости использовать специально адаптированный тестирующий сигнал, как это требуется в известных системах. Система использует подводный сенсорный узел, содержащий:
(a) группу электрических датчиков, выполненных с возможностью измерения электрических полей в нескольких взаимно ортогональных направлений; и
(b) группу гидроакустических звукоприемников для пассивного прослушивания звукового (акустического) излучения, причем указанные гидроакустические звукоприемники ориентированы в нескольких направлениях для того, чтобы определять направление, в котором излучена звуковая (акустическая) энергия.
Кроме того, система содержит процессор, соединенный с подводным сенсорным узлом для получения сигналов от сенсорного узла, для того, чтобы обрабатывать полученные сигналы и представлять обработанные результаты, полученные из полученных сигналов, одному или нескольким пользователям системы и/или для хранения обработанных результатов для последующего использования позже. Преимущественно, система может быть выполнена с возможностью синергетической связи информации, полученной от нескольких электрических датчиков и нескольких гидроакустических звукоприемников для того, чтобы более точно идентифицировать пространственное местоположение подводной неисправности и/или природу подводной неисправности. Из-за ее пассивной природы, использование системы не требует прерывания или нарушения работы исследуемой конструкции, например, для получения тестирующего сигнала.
Другими словами, настоящее изобретение относится к пассивному подводному мониторингу электрических условий для обнаружения, ограничения и характеризации неисправностей в погруженных конструкциях путем измерения искусственных электрических сигналов, сгенерированных такими конструкциями. Под искусственными электрическими сигналами понимаются электрические сигналы, которые не имеют естественного источника; в подводной окружающей среде также присутствуют электрические сигналы, которые происходят от естественных источников, таких как Земля, океан и атмосфера.
На Фиг.1 изображена окружающая среда, включающая надводную область 15 и подводную область 10. Система, в соответствии с настоящим изобретением, содержит подводный сенсорный узел 20, выполненный с возможностью работы в области 10, и соединенный через один или несколько гибких соединителей 30 с устройством 40 обработки данных, выполненным с возможностью работы в области 15. Также показан погруженный электродвигатель 50, например, грязевый циркуляционный насос для производства нефти или производства газа. Двигатель 50 представляет собой 3-фазный асинхронный двигатель, имеющий три электрические фазы 60а, 60b, 60с. Кроме того, эти три фазы 60а, 60b, 60с соединены через экранирующий кожух 70 кабеля с преобразователем 80 частоты так, что:
(а) двигатель 50 снабжается трехфазным электропитанием на частоте F2;
и
(b) преобразователь 80 частоты снабжается трехфазным электропитанием на частоте F1 от вторичной обмотки; трансформатора 100, поставляемым преобразователем 80 по экранирующему кожуху 90 кабеля.
Первичная обмотка трансформатора 100 присоединена к трехфазному источнику питания, расположенному в области 15.
При работе, когда двигатель 50 присоединен к своему трехфазному электропитанию 60а, 60b, 60с, подводный сенсорный узел 20 перемещают в воду в непосредственной близости рядом с двигателем 50, кожухами 70, 90, преобразователем 80 частоты и трансформатором 100, чтобы измерять электрические поля, присутствующие в воде, и звуковую (акустическую) энергию, передаваемую через воду и создающую соответствующие измеряемые электрические и звуковые сигналы, соответственно, Е и S. Подводный сенсорный узел 20 совместно со своим устройством 40 обработки данных выполнен с возможностью непрерывной обработки измеряемых электрического и звукового сигналов, соответственно, Е и S, в реальном времени, чтобы сгенерировать обработанные данные для представления и/или для хранения в памяти данных, чтобы создать запись. Такая непрерывная обработка включает, например:
(a) определение частотного спектра Н одного или нескольких измеряемых сигналов Е, S;
(b) корреляцию одного или нескольких частотных спектров Н одного или нескольких электрических измеряемых сигналов Е с эталоном частотного спектра те иллюстративных измеряемых сигналов, соответствующих различным категориям неисправностей;
(c) корреляцию одного или нескольких частотных спектров Н одного или нескольких звуковых измеряемых сигналов S с эталоном частотного спектра Ts иллюстративных измеряемых сигналов, соответствующих различным категориям неисправностей; и/или
(d) корреляцию как одного или нескольких частотных спектров Н электрических измеряемых сигналов Е, так и одного или нескольких частотных спектров Н звуковых измеряемых сигналов S, чтобы идентифицировать синергетически определенные категории неисправностей, например, в отношении одного или нескольких эталонов звуковой - электрической корреляции TES, соответствующих различным категориям неисправностей.
В этом случае "корреляция" должна пониматься широко, чтобы означать любые способы сравнения, например, математическую корреляцию, так же как и другие подходы к сравнению сигналов, такие как нейронные сети и основанные на правилах алгоритмы.
На Фиг.2 показана схематическая иллюстрация компонентов сенсорного узла, в целом обозначенного номером позици 20. Сенсорный узел 20 содержит кожух 150, на который установлены электрические датчики 190а, 190b, 190с. Кроме того, на кожухе 150 также установлены гидроакустические звукоприемные датчики 200а-200n. Кожух 150 содержит блок 160 интерфейса для получения управляющих сигналов и питания от устройства 40 обработки в области 15, и для посылания измеряемых сигналов от сенсорного узла 20 к устройству 40 обработки. Кожух 150 дополнительно содержит процессор 170 цифрового сигнала (DSP), содержащий аппаратные средства для обработки сигналов и локальную память данных. Электрические датчики 190а, 190b, 190с соединены через малошумящие усилители, соответственно, 180а, 180b, 180 с, чтобы сигнализировать о приеме данных на входы процессора 170 цифрового сигнала; малошумящие усилители 180а, 180b, 180с обеспечивают усиление сигнала, например, в диапазоне от 60 дБ до 90 дБ, который в индивидуальном порядке может быть отрегулирован под управлением, как обозначено номером позиции 185, от процессора 170 цифрового сигнала. Кроме того, гидроакустические звукоприемные датчики 200а-200n соединены через усилители, соответственно, 210а-210n, чтобы сигнализировать о приеме данных на входы процессора 170 цифрового сигнала. Процессор 170 цифрового сигнала соединен, чтобы посылать данные блоку 60 интерфейса, который, в свою очередь, соединен с указанным одним или несколькими гибкими соединителями 30, например, выполнен в виде узла удлиненнного армированного разъемного гибкого кабеля.
При работе звуковые и электрические сигналы, обнаруженные электрическими датчиками 190а, 190b, 190с и гидроакустическими звукоприемными датчиками 200а-200n, усиливаются, преобразуются из аналоговой в цифровую форму, а затем передаются как соответствующие данные через блок 160 интерфейса через указанный один или несколько гибких соединителей 30. Блок 160 интерфейса выполнен с возможностью преимущественной работы с питанием 230 В переменного тока для питания сенсорного узла 20. Сигналы передаются между сенсорным узлом 20 и устройством 40 обработки данных через пару скрученных проводов, включенных в указанный один или несколько гибких соединителей 30; причем скрученный провод передает двунаправленный поток данных формата Ethernet.
Электрические датчики 190а, 190b, 190с выполнены с возможностью обнаружения градиентов потенциала, а именно, электрических полей, соответствующих по порядку величины нВ/метр или больше. Чтобы измерить такие градиенты потенциала, датчик 190а, 190b, 190с использует дифференциальную технику измерений в ортогональных осях x, y, z, как проиллюстрировано на Фиг.5. Датчик 190а, 190b, 190с содержит три пары электродов 195, расположенные вдоль осей z, y, z; а именно, первая пара 190а электродов 195 ориентирована вдоль оси Y, вторая пара 190b электродов 195 ориентирована вдоль оси X, и третья пара 190с электродов 190 с ориентирована вдоль оси Z. Электроды 195 сами по себе имеют очень специальную конструкцию, которая будет объяснена более подробно позже со ссылкой на Фиг.6.
Гидроакустические звукоприемные датчики 200а-200n содержат гидроакустические звукоприемники, содержащие пьезоэлектрические, электромагнитные и/или конденсаторные преобразователи. Гидроакустические звукоприемники гидроакустических звукоприемных датчиков 200а-200n расположены в различных ориентациях на датчике 20, чтобы обеспечить взаимно различные полярные отклики на полученную звуковую энергию в сенсорном узле 20. Например, гидроакустический звукоприемный датчик 200а-200b совместно с процессором 170 цифрового сигнала может функционировать как управляемая гидроакустическая антенная решетка, обеспечивающая характеристику полярной чувствительности, которая выполнена с возможностью непосредственного управления путем выборочного сдвига фазы и усиления сигналов, обеспеченных гидроакустическими звукоприемниками.
На Фиг.3 и 4 в комбинации более подробно изображен вариант выполнения сенсорного узла 20. Сенсорный узел 20 содержит несущую раму, содержащую четыре прочных удлиненных трубчатых элемента 250, которые поддерживают защитную раму более тонких удлиненных трубчатых элементов 260. Трубчатые элементы 250, 260 проходят от верхней части сенсорного узла 20, где они соединены с верхним кольцом, к основанию 270 сенсорного узла 20. Сенсорный узел 20 механически опускают в воду для выполнения измерения путем сцепления лебедки по существу в области верхнего кольца. Основание 270 содержит усеченную коническую перемычку так, чтобы тонкие части сенсорного узла 20 были механически ограждены от повреждения в случае, когда сенсорный узел 20 входит в контакт с морским дном. Кроме того, трубчатые элементы 250, 260 ограничивают внутренний объем сенсорного узла 20, включая подводный кабель 300, оканчивающийся в одном конце в первом подводном соединителе 310, а в другом конце - во втором подводном соединителе 305, связанном с первым и вторым водонепроницаемыми трубчатыми кожухами 280, 290 для размещения усилителей 180, 210, процессора 170 цифрового сигнала и блока 160 интерфейса. Должно быть видно, что гидроакустический звукоприемный узел 200а-200j расположен в направленных вбок и вверх группах гидроакустических звукоприемников. Сенсорный узел 20 содержит трубчатые соединительные водонепроницаемые трубочки для передачи сигналов от гидроакустических звукоприемников и пар электродов 190а, 190b, 190с к кожухам 280, 290.
На Фиг.6 проиллюстрирована физическая конструкция одного из электродов 195. Известно, что при выполнении измерения потенциала в воде, содержащей проводящие соли, включающие катионы и анионы, возникают гальванические потенциалы при контакте с электродами. Эти гальванические потенциалы возникают близко к поверхности электрода в связи с одной или несколькими следующими причинами:
(a) более высокая электронная плотность в материале электрода по сравнению с соленой водой, окружающей электрод, вызывает диффузию электронов от поверхности электрода на несколько нанометров в соленую воду благодаря неопределенности в положении электрона и связанным с ним туннелированием электрона, в соответствии с принципом неопределенности Гейзенберга, таким образом, приводя к возникновению емкостного эффекта со связанным с этим электроном энергетическим барьером; и
(b) локальная химическая реакция происходит на электроде с катионами и анионами, имеющимися в соленой воде, создавая энергетический барьер.
При некоторых обстоятельствах общепринято использовать электроды из нержавеющей стали, чтобы справиться с реакциями в (b), но значительная неустойчивость в контактных потенциалах нержавеющей стали с соленой водой безусловно делает эти электроды из нержавеющей стали шумными и неустойчивыми. В качестве альтернативы в измерителях расхода воды и подобных инструментах для измерения расхода несоленой воды использовались электроды, изготовленные из серебра, или из комбинации серебра и хлорида серебра. Эти серебряные электроды имеют тенденцию довольно быстро подвергаться действию коррозии в агрессивной соленой окружающей среде, в которой сенсорный узел 20 предназначен для работы. Кроме того, как для электродов из нержавеющей стали, так и для серебряных электродов временные флуктуации в концентрациях различных катионов и анионов в соляном растворе могут влиять на сигналы, созданные этими электродами, которые находятся потенциально по меньшей мере частично в диапазоне представляющих интерес частот. Временные флуктуации проявляются, таким образом, в увеличенном фоновом шуме, создаваемом электродом.
При применении сенсорного узла 20 было обнаружено чрезвычайно преимущественным выполнять электроды 195 таким образом, как проиллюстрировано на Фиг.6. Электрод 195 содержит электродный элемент 430, выполненный с использованием по существу инертного углеродистого волоконного материала, альтернативно, графита; электродный элемент 430 присоединен ко входу усилителя. Углеродистый волоконный материал может быть пористым. В качестве альтернативы, графит не реагирует с соленой водой и имеет более низкую электронную плотность, по сравнению с материалами, такими как серебро и нержавеющая сталь. Кроме того, углеродистый волоконный материал, в качестве альтернативы, графит, имеет преимущество в открытой пористой природе, так чтобы соленая вода проникла в углеродистый волоконный материал, альтернативно, графит, для обеспеченного усиленного к нему соединения, сопротивляясь, таким образом, тенденции электрода стать по меньшей мере частично изолированным от морской воды посредством отложений, образованных на поверхности углеродистого волоконного материала или графита. Кроме того, электрод 195 содержит ограничитель 410 потока, содержащий одно или несколько отверстий 420 для экранирования электродного элемента 430 от быстрых временных флуктуации в концентрации катионов и анионов соли, когда соленая вода протекает мимо сенсорного узла 20 при работе последнего. Могут также иметься несколько отверстий 420 в ограничителе 410 потока. Электродный элемент 430 электрически соединен со связанным с ним малошумящим усилителем 180. Кроме того, ограничитель 410 потока выполнен в металле или полимерном изолирующем материале. Электродный элемент 430 поддерживается механическим основанием 400, который обеспечивает возможность установки электрода 195 в сенсорном узле 20, как изображено на Фиг.3 и 4.
Малошумящие усилители 180 подвержены фликкер-шуму на частотах, существенно ниже 100 Гц, дробовому шуму на частотах до нескольких кГц, и широкополосному тепловому шуму в широком частотном спектре. Ввиду того, что усилители 180 должны усиливать сигналы, созданные на электродах 195, порядка нановольт (нВ), усилители 180 предпочтительно представляют собой малошумящие усилители на ПТ, биполярных транзисторах или термоэлектронных вакуумных трубках, выполненных так, чтобы показывать низкий собственный шум в частотных диапазонах, представляющих интерес для работы сенсорного узла 20. Подобные соображения также относятся к усилителям 210, связанным с гидроакустическим звукоприемным узлом 200.
Теперь со ссылкой на Фиг.7 будет более подробно описано устройство 40 обработки данных. Устройство 40 находится, например, на судне, таком как морское или речное судно, нефтяная платформа, газовая буровая установка, но также может быть поддерживаться субмариной, маневрирующей в более мелкой воде, чем та, где установлен сенсорный узел 20. Для осуществления сообщения через указанный один или несколько гибких соединителей 30 с блоком 160 интерфейса сенсорного узла 20, устройство 40 обработки данных содержит блок 500 интерфейса, например, выполненный с возможностью поддержания двунаправленной коммуникации по сети Ethernet. Узел 500 интерфейса соединен внутри устройства 40 обработки с компьютером 510, содержащим устройство 520 для хранения данных, например, магнитные дисководы и/или твердотельную память. Компьютер 510 соединен с дисплеем 530, например, одним или несколькими плоскими ЖК дисплеями для того, чтобы представлять результаты одному или нескольким пользователям. Кроме того, устройство 540 ввода данных, например, клавиатура со связанной с ней мышью или шаровым манипулятором соединено с компьютером 510.
Компьютер 510 выполнен с возможностью выполнения одного или нескольких программных продуктов, переданных ему на носителе информации, например, на оптическом диске, на сигнале, таком как интернет-сигнал, в запоминающем твердотельном устройстве. Кроме того, компьютер 510 способен к загрузке и/или формированию одного или нескольких программных продуктов, выполняемых при работе на процессоре 170 цифрового сигнала сенсорного узла 20. Хотя процессор 170 цифрового сигнала сенсорного узла 20 прежде всего выполняет прием сигнала и форматирования принятых сигналов, например, может применять сжатие данных, такое как параметрическое представление приобретенных сигналов для передачи через указанный один или несколько гибких соединителей 30, компьютер 510, прежде всего имеет дело с интерпретацией сигналов, сообщенных от сенсорного узла 20, например, основываясь на правилах сравнения, корреляции или им подобным, и представляя соответствующие результаты на дисплее 530.
На Фиг.8 показана блок-схема этапов, непрерывно выполняемых сенсорным узлом 20 совместно с его устройством 40 обработки данных. Блок-схема представляет этапы способа, который предпочтительно повторяющимя образом и непрерывно осуществляется.
Первый этап 600 способа касается обнаружения сигналов на парах электродов 190 и/или в гидроакустическом звукоприемном узле 200.
Второй этап 610 способа касается усиления в усилителях 180, 210 сигналов, полученных на первом этапе для генерации соответствующих усиленных сигналов; причем усиление может представлять собой одно или более из:
(a) переменный коэффициент усиления под управлением программного обеспечения от процессора 170 цифрового сигнала и/или компьютера 510;
(b) динамически переменный коэффициент усиления в ответ на измеряемую амплитуду сигнала, чтобы обеспечить расширенный динамический диапазон измерения; и
(c) подверженный частотному фильтрованию усилителями 180, 210, чтобы удалить шум на ранней стадии, насколько это возможно, во время управления сигнала; такое фильтрование может динамически изменяться под управлением программным обеспечением.
Третий этап 620 имеет дело с обработкой усиленных и оцифрованных сигналов, а именно, подверженных аналого-цифровому преобразованию путем одного или более из:
(i) обработки сигналов S от гидроакустического звукоприемного узла 200, чтобы обеспечить диаграмму направленности с управляемым положением главного лепестка для придания гидроакустическому звукоприемному узлу 200 определенную характеристику чувствительности к направлению; сигналы S от одного или нескольких гидроакустических звукоприемников гидроакустического звукоприемнного узла 200 индивидуально подвержены регулировке усиления и относительному сдвигу фазы для генерации промежуточных сигналов; промежуточные сигналы затем суммируются для создания сигнала для того, чтобы передать его компьютеру 510; отдельные регулировки усиления и относительные сдвиги фазы используются, чтобы управлять характеристиками направленности, в которой предпочтительная чувствительность обеспечивается гидроакустическим звукоприемным узлом 200;
(ii) вычисления разницы между сигналами, полученными от электродных пар 190а, 190b, 190с, чтобы вычислить разностные сигналы, указывающие на градиент электрического поля, который испытывают электродные пары 190а, 190b, 190с;
(iii) фильтрования сигналов для удаления шумовых компонентов сигнала, которые не способствуют обнаружению неисправностей или контролю подобных условий;
(iv) применения анализа сигнала, чтобы сгенерировать частотные спектры сигналов и их относительные фазовые соотношения, чтобы создать параметрические представления, параметры которых затем сообщаются компьютеру 510 через блоки 160, 500 интерфейса и указанный один или несколько гибких соединителей 30; и
(v) применения сжатия данных сигналов для сообщения соответствующих сжатых сигналов через блоки 160, 500 интерфейса и указанный один или несколько гибких соединителей 30,
Третий этап содержит также передачу выходных данных от сенсорного узла 20 через блоки интерфейса 160, 500 на компьютер 510.
Четвертый этап 630 имеет дело с обработкой оцифрованных сигналов в компьютере 500 и, если требуется, созданием регистрации оцифрованных сигналов. Такая обработка включает одно или несколько из:
(a) анализа частотного спектра;
(b) корреляции и аналогового сравнения частотных спектров сигнала с частотными спектрами эталона для того, чтобы идентифицировать определенные типы неисправностей;
(c) сравнения оцифрованных сигналов, их частотных спектров, или корреляцию их частотных спектров с одним или несколькими пороговыми пределами для определения, идентифицирован зондом или нет определенный тип неисправности.
Четвертый этап также содержит получение управляющих инструкций от одного или нескольких пользователей в отношении одного или нескольких из:
(a) управления чувствительностью направленности для гидроакустических звукоприемников в предпочтительном направлении;
(b) выбора предпочтительного спектрального эталона, для которого должен быть обнаружен определенный тип неисправности;
(c) разрешения сигналов от электродных пар 190а, 190b, 190с на любых конкретных частотах, чтобы определить направление, в котором направлено электрическое поле относительно зонда 20;
(d) регулирования порогового предела для обнаружения одного или нескольких типов неисправностей;
(e) применения определенного типа фильтра к одному или нескольким сигналам, обеспечиваемых сенсорным узлом 20; и
(f) сравнения измеряемых сигналов от сенсорного узла 20, полученных в реальном времени, с предшествующей записью соответствующих сигналов для того, чтобы обнаружить любые изменения, которые произошли, например, которые соответствуют постепенно развивающейся неисправности.
Пятый этап 640 способа имеет дело с представлением вычисленных результатов одному или нескольким пользователям. Такое представление предпочтительно обеспечивается через графический интерфейс программного обеспечения, предусмотренному на дисплее 640.
Способ может непрерывно повторяться в реальном времени, как обозначено пунктирной стрелкой 650. Кроме того, итерация назад и вперед между четвертым и пятым этапами 630, 640 также выполняют так, как объяснено ранее. Кроме того, компьютер 500 синергетически может обрабатывать сигналы как от гидроакустического звукоприемного узла 200, так и от электродных пар 190, при этом идентификация неисправностей приводит к созданию как звуковых (акустических) сигналов, так и соответствующих электрических полей; например, область, где вода проникла в подводный силовой кабель, в результате чего электролитическое действие создает пузыри от кабеля и также тока проводимости и, таким образом, создает слабое электрическое поле в воде. Когда в подводные узлы включены двигатели, для обнаружения разбалансировки двигателя и/или признаков ранней неисправности подшипников двигателя за счет определения акустических гармоник частоты, на которой вращается двигатель, может быть использован гидроакустический звукоприемный узел 200.
Четвертый этап 630 может обеспечивать возможность идентификации ключевых гармонических подписей. Например, синхронные индуктивные ротационные машины, развернутые в подводной окружающей среде, изготавливаются так, чтобы их роторы двигателя были сбалансированы для уменьшения вибрации, чтобы, например, уменьшить износ и механическое напряжение на опорных подшипниках ротора. Такие роторы подвержены вращающемуся магнитному полю на частоте F1, по существу на частоты сети, равной 50 Гц, или на некоторой другой частоте, когда используются электронные двигатели, работающие на переменной частоте. Кроме того, такие роторы двигателя вращаются на частоте F2 в режиме холостого хода, которая обычно по существу равна частоте F1 или ее субгармонике, в зависимости от числа полюсов, содержащихся в двигателе. Однако когда роторы двигателя подвергнуты действию механической нагрузки, они вращаются на частоте F2', которая меньше, чем частота F2 из-за проскальзывания, происходящего в двигателях. Уравнения 1 и 2 (Ур.1 и 2) в первом приближении описывает соотношения этих частот F1, F2 и F2':

где
F1 = частоте вращающегося магнитного поля;
F2 = частоте вращения ротора в режиме холостого хода;
F2' = частоте вращения ротора под нагрузкой;
n = гармоническому числу, когда m=1;
m = субгармоническому числу, когда n=1;
Т = приложенному к ротору вращательному моменту;
k = характеристикам нагрузки двигателя ротора.
Для описания условий нагрузки в большей степени, когда вращательный момент Т является значительным, выражение кТ в уравнении заменяют на kg(T), где g представляет собой полином. В ситуации, в которой используется управляющий сигнал переменной частоты, например, созданный с использованием мощных твердотельных электронных коммутирующих элементов, двигатели снабжаются электрическими управляющими сигналами, которые имеют следящие электрические гармонические компоненты с более высокими частотами.
Когда сенсорный узел 20 используется для исследования погруженной индукционной ротационной машины, которая подвергается переменному проскальзыванию из-за приложенной к ней переменной крутящей нагрузки, гидроакустические звукоприемные датчики 200а и 200n выполнены с возможностью генерирования сигналов, которые включают компоненты сигнала, имеющие различные частоты, по сравнению с компонентами сигнала, присутствующими в сигналах, созданных электрическими датчиками 190а, 190b, 190с. Как упомянуто выше, на практике было найдено, что определенные гармонические или подгармонические компоненты в особенности указывают на механические или электрические процессы, происходящие в таких ротационных машинах.
На Фиг.9 изображен график, на котором показана ось 800 абсцисс, обозначающая частоту, увеличивающуюся слева направо, и ось 810 ординат, обозначающая ампдитуду гармонической составляющей, увеличивающуюся снизу вверх. Компоненты 830а, 830b, 840с, 830d соответствуют фундаментальной (первой гармонике), второй гармонике, третьей гармонике и четвертой гармонике электрического управляющего сигнала ротационной машины, как обнаруживается с использованием электрического датчика 190а, 190b, 190с. Кроме того, компоненты 850а, 850b и 850с соответствуют фундаментальной (первой гармонике), второй гармонике и третьей гармонике акустического сигнала, созданного ротационной машиной, который обнаруживается с использованием гидроакустического звукоприемного датчика 200а-200n. Как обозначено стрелками 860, разница частот между гармониками является функцией проскальзывания, имеющего место в ротационной машине и, следовательно, функцией приложенной к ней механической нагрузки, как показано на Фиг.10.
На Фиг.10 ось 900 абсцисс слева направо обозначает прошедшее время, а ось 910 ординат обозначает увеличивающуюся частоту снизу вверх. Кривая 920 соответствует нормированному на частоту гармоническому компоненту электрического сигнала, полученному с использованием электрического датчика 190а, 190b, 190с. Кроме того, кривая 930 соответствует нормированному на частоту акустическому сигналу, полученному с использованием гидроакустического звукоприемного датчика 200а-200n. Кривые 920, 930 расходятся по частоте, когда ротационная машина механически нагружается так, как описано в вышеупомянутых Уравнениях 1 и 2 (Ур.1 и 2). Сенсорный узел 20, таким образом, обеспечивает возможность осуществления контроля эксплуатационных показателей ротационных машин, развернутых в подводной окружающей среде. Для выполнения диагностики потенциальных неисправностей с такими ротационными машинами, относительные амплитуды гармонических элементов могут быть отслежены в ответ на приложение к ротационной машине различных нагрузок. Используя такой подход, можно на ранней стадии обнаружить поврежденные или изношенные подшипники двигателя, неисправности в насосах, присоединенных к таким ротационным машинам, и т.д. Современная глубоководная разведка нефти и добыча нефти со многих сотен метров глубины воды используют устройство, развернутое на морском дне и предназначенное для выполнения перекачки нефти и газа, нагнетания грязи, воды и т.д; в случае появления неисправностей в таком устройстве чрезвычайно дорого выполнять обслуживание и поднимать устройство на поверхность моря, так что настоящее изобретение может использоваться в диагностических целях для идентификации проблем и, в определенной ситуации, избегать необходимости в ненужной замене и/или ремонте такого устройства.
Настоящее изобретение не ограничено выполнением измерений на ротационных машинах. Например, сенсорный узел 20 может быть использован для осуществления контроля работы электромеханических приводов, электромеханических клапанов, подводных кабелей, а также в большом количестве другого оборудования. Сенсорный узел 20 также может использоваться для обнаружения утечек в подводных трубах, например, подводных нефтепроводах.
Сенсорный узел 20 может содержать дополнительное оборудование, например, один или несколько:
(a) магнитных компасов для обнаружения ориентации сенсорного узла 20 относительно магнитных полюсов Земли;
(b) инерционных навигационных систем, содержащих гироскопы и акселерометры для осуществления контроля ориентации и положения сенсорного узла 20 в подводной области 10; в такой инерционной навигационной системе могут использоваться ошибкоустойчивые кремниевые прецизионно обработанные акселерометры и оптоволоконные гироскопы; положение и ориентация сенсорного узла 20 тогда преимущественно визуализируемы на дисплее 530 для одного или нескольких пользователей;
(c) датчиков глубины для определения глубины сенсорного узла 20 в подводной области 10;
(d) температурных датчиков для измерения температуры воды около сенсорного узла 20, например, определенные типы короткого замыкания в электрической цепи, такие как частичные короткие замыкания могут порождать ограниченные эффекты нагрева; и
(e) цифровых камер для наблюдения ближней области, в которой работает сенсорный узел 20; указанная одна или несколько цифровых камер содержат по меньшей мере одну инфракрасную чувствительную камеру. Указанная одна или несколько камер могут быть выполнены с возможностью управления от компьютера 500.
Модификации вариантов выполнения изобретения, описанного в предшествующем описании, возможны без отступления от объема изобретения, как определено в сопровождающей формуле изобретения.
Подводный сенсорный узел 20 может также содержать один или несколько химических датчиков 800, как проиллюстрировано на Фиг.2, для измерения одного или нескольких химических веществ, присутствующих в подводной области 10. Указанный один или несколько химических датчиков 800 преимущественно основаны на одном или более из следующего:
(а) одном или нескольких ХПТ датчиков, использующих один или несколько устройств на полевых транзисторах (ПТ), чей соответствующий один или несколько затворов легированы или иным образом выполнены так, чтобы транзисторные устройства работали с предпочтительной чувствительностью к определенным типам ионов, присутствующих в растворе в подводной области 10;
(b) одном или нескольких органических химических датчиков, содержащих ферменты или полипептиды, меченные флуоресцентными молекулами, чей оптический отклик изменяется в ответ на связывание ферментов или полипептидов с комплементарными молекулами, присутствующими в подводной области 10, например грязи от изолирующих полимеров, вырожденных в результате подводного электрического разряда; такие способы могут включать выброс флуоресцентного следящего материала в область вокруг подводного сенсорного узла 20, а затем использование оптической радиации, чтобы удаленно опрашивать область воды для осуществления контроля флюоресценции следящего материала, выброшенного в указанную область;
(c) одном или нескольких химических датчиков, основанных на использовании одной или нескольких селективных мембран, например, одной или нескольких липидных мембран; диффузии химических веществ, присутствующих в области воды вокруг сенсорного узла 20, через такую мембрану в камеру запроса так, что химические вещества, успешно продиффундировавшие в камеру запроса, обнаруживаются способами оптических спектральных измерений; преимущественно, указанная одна или несколько мембран периодически или непрерывно механически продвигаются, чтобы обнажать новый мембранный материал для предотвращения блокировки или деактивации указанной одной или нескольких мембран другими материалами, присутстующими в области, окружающей сенсорный узел 20; и
(d) одном или нескольких химических датчиков, основанных на освещении области поблизости подводного сенсорного узла 20 и измерении оптического спектрального отклика указанной области.
Сигналы, сгенерированные при работе одним или несколькими химическими датчиками 800, указывают на химические соединения и/или органические молекулы, присутствующие в подводной области 10; эти сигналы сообщаются процессору 170 цифрового сигнала. Процессор 170 цифрового сигнала выполнен с возможностью обработки этих сигналов для создания промежуточных данных химического датчика; промежуточные данные химического датчика впоследствии сообщаются через указанный один или несколько гибких соединителей 30 к устройству 40 обработки. Устройство 40 обработки выполнено с возможностью интерпретации промежуточных данных химического датчика, чтобы помочь с идентификацией природы потенциальной неисправности, имеющей место в подводной области 10. Например, электрический пробой в данном типе подводной области, в которой может быть использован данный тип полимерной изоляции, приводит к определенным побочным продуктам химического распада, которые выбрасываются в подводную область 10 вместе с образованием пузырей, приводящим к характерному типу акустического шума, а также электрических полей в подводной области, имеющих определенную ориентацию в пространстве. Устройство 40 обработки выполнено с возможностью идентификации определенных типов химических, акустических подписей и подписей электрического поля определенных категорий короткого замыкания, имеющихся в электрической цепи в подводной области 10, например, путем кросс-корреляции и/или обработки типа нейронной сети, которые выполняются в устройстве 40 обработки.
Указанный один или несколько химических датчиков 800 в комбинации с гидроакустическим звукоприемным датчиком 200 выполнены с возможностью, например, обеспечивать возможность подводному сенсорному узлу 20 обнаруживать утечки от погруженных труб с одновременной проверкой, присутствуют ли короткие замыкания в электрической цепи. При такой работе подводный сенсорный узел 20 способен выполнять более всестороннюю диагностику.
Подводный сенсорный узел 20 преимущественно снабжается электроэнергией через указанный один или несколько гибких соединителей 30. В качестве альтернативы, или дополнительно, подводный сенсорный узел 20 содержит свой собственный источник электроэнергии, например, один или несколько аккумуляторов; аккумуляторы литий-ион-полимер, никель-металл-гидрид (NiMH) аккумуляторы и даже герметичные гелевые свинцово-кислотные аккумуляторы, которые годятся для обеспечения электроэнергией, чтобы управлять подводным сенсорным узлом 20. Использование аккумуляторов в сенсорном узле 20 является преимуществом, заключающемся в том, что паразитные наведенные электрические сигналы в воде поблизости сенсорного узла 20, связанные с электропитанием через указанный один или несколько гибких соединителей 30 с сенсорным узлом 20, могут уменьшаться.
Хотя использование гидроакустического звукоприемного узла 200 в режиме фазовой решетки было описано в предшествующем описании, подводный сенсорный узел 20 также может быть выполнен с возможностью осуществления контроля сигналов, созданных от отдельных гидроакустических звукоприемников гидроакустического звукоприемного узла 200 для того, чтобы идентифицировать пространственное местоположение источника акустической энергии поблизости сенсорного узла 20.
Такие выражения, как "включающий", "содержащий", "охватывающий", "состоящий из, "имеющий", используются для описания настоящего изобретения и в формуле изобретения, эти выражения следует рассматривать в неисключительной манере, а именно, чтобы также присутствовали не описанные явно детали, элементы или компоненты. Ссылка на единственное число также предусматривает наличия множественного числа.
Номера позиций, включенные в круглые скобки в сопровождающей формуле изобретения, предназначены, чтобы помочь пониманию формулы изобретения и не должны рассматриваться как ограничивающие предмет изобретения, заявленный в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЦЕНКА УГЛА ПРИХОДА РАДИОСИГНАЛА В СЕТИ РАДИОСВЯЗИ | 2017 |
|
RU2745874C1 |
| ДАТЧИК ВИБРАЦИИ | 2021 |
|
RU2801712C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ПОЗИЦИОНИРОВАНИЯ КОНВЕРТА И ОТНОСЯЩИЕСЯ К НЕМУ СПОСОБЫ | 2009 |
|
RU2496701C2 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2703100C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2701999C1 |
Изобретение относится к подводным измерительным системам. Сущность: система (20, 30, 40) для осуществления контроля подводной области (10) содержит сенсорный узел, выполненный с возможностью измерения по меньшей мере одной физической переменной в указанной области (10) с обеспечением генерирования по меньшей мере одного соответствующего сигнала датчика, и устройство (170, 510, 520) обработки данных, предназначенное для обработки по меньшей мере одного сигнала датчика для создания обработанных данных для представления и/или регистрации. Сенсорный узел (20) содержит один или несколько датчиков (190) напряжения, выполненных с возможностью измерения электрических полей, присутствующих в подводной области (10), и предоставления информации в по меньшей мере одном сигнале, указывающем на наличие электрических полей. Кроме того, сенсорный узел (20) содержит один или несколько гидроакустических звукоприемников (200), выполненных с возможностью получения звуковой энергии, созданной в подводной области (10), и включения соответствующей информации в указанный по меньшей мере один сигнал датчика для ее сообщения устройству (170, 510, 520) обработки данных. 2 н. и 21 з.п. ф-лы, 10 ил.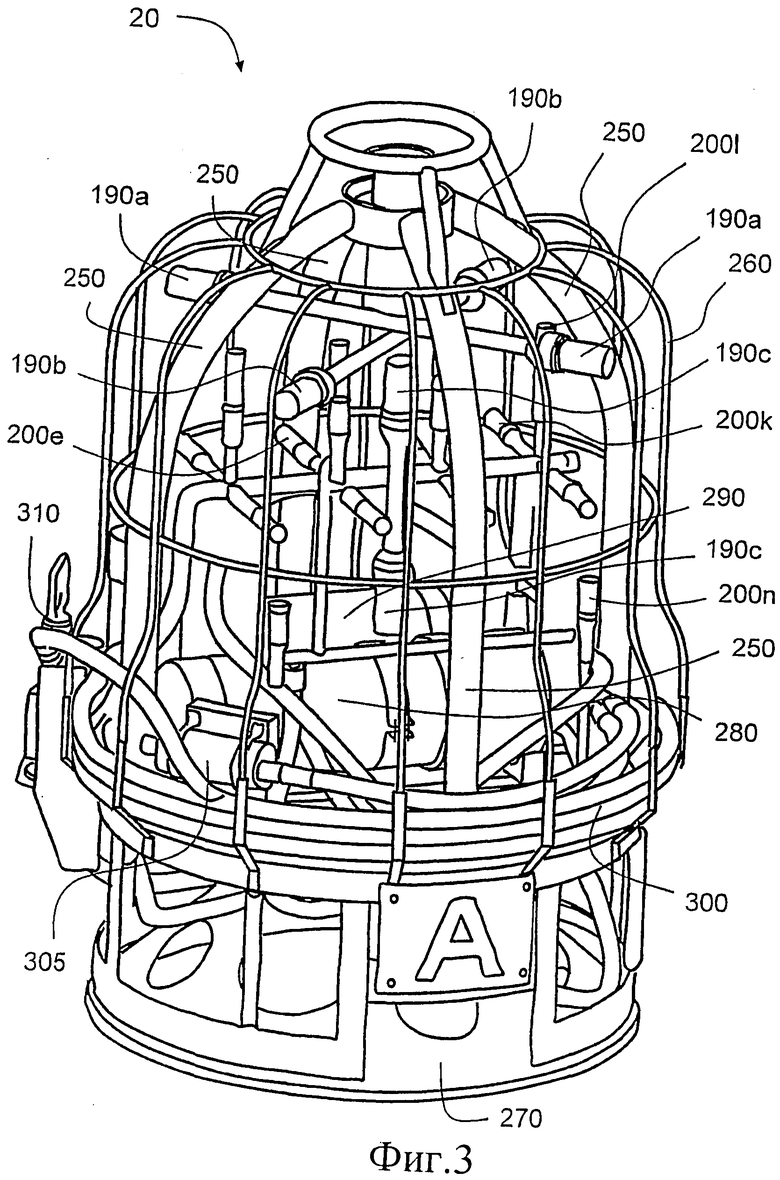
1. Подводная измерительная система (20, 30, 40) для осуществления контроля подводной области (10), содержащая сенсорный узел, выполненный с возможностью измерения по меньшей мере одной физической переменной в указанной области (10) для генерирования по меньшей мере одного соответствующего сигнала датчика, и устройство (170, 510, 520) обработки данных, предназначенное для обработки указанного по меньшей мере одного сигнала датчика для создания обработанных данных для представления и/или регистрации,
отличающаяся тем, что
указанный сенсорный узел (20) содержит один или несколько датчиков (190) напряжения, выполненных с возможностью измерения электрических полей, присутствующих в подводной области (10), и предоставления информации в указанном по меньшей мере одном сигнале, указывающей на указанные электрические поля, при этом
указанный сенсорный узел (20) содержит один или несколько гидроакустических звукоприемников (200), выполненных с возможностью получения звуковой энергии, созданной в указанной подводной области (10), и включения соответствующей информации в указанный по меньшей мере один сигнал датчика для ее сообщения указанному устройству (170, 510, 520) обработки данных,
причем указанный один или несколько гидроакустических звукоприемников (200) выполнены в виде решетки гидроакустических звукоприемников (200), чья характеристика звуковой чувствительности при работе имеет одно или несколько предпочтительных направлений чувствительности для обеспечения возможности определения направления источника звуковой энергии,
при этом указанный один или несколько гидроакустических звукоприемников (200) составляют при работе фазовую решетку гидроакустических звукоприемников (200), чьи характеристики полярной чувствительности выполнены с возможностью управления с помощью электроники от указанного устройства (170, 520, 520) обработки данных.
2. Подводная измерительная система (20, 30, 40) по п.1, в которой указанный один или несколько датчиков (190) напряжения выполнены в виде одной или нескольких пар электродов (195), выполненных с возможностью обеспечения измерения дифференциального напряжения в указанной области (10), а указанная одна или несколько пар электродов (195) выполнены с возможностью обеспечения дифференциальных измерений потенциала в нескольких взаимно ортогональных направлениях.
3. Подводная измерительная система (20, 30, 40) по п.2, в которой указанная одна или несколько пар электродов (195) изготовлены из инертного материала, который не вступает в химическую реакцию с соленой водой.
4. Подводная измерительная система (20, 30, 40) по п.2 или 3, в которой указанное устройство (170, 510, 520) обработки данных выполнено с возможностью анализа указанного по меньшей мере одного сигнала датчика для определения направления, в котором ориентировано электрическое поле на заданной частоте сигнала, для того, чтобы помочь в определении местоположения источника электрического поля внутри подводной области (10).
5. Подводная измерительная система (20, 30, 40) по любому из пп.1-3, в которой указанный сенсорный узел (20) содержит один или несколько химических датчиков (800), выполненных с возможностью обнаружения одного или нескольких химических соединений или элементов, присутствующих в указанной подводной области (10), и включения соответствующей информации в указанный по меньшей мере один сигнал датчика для ее сообщения в указанное устройство (170, 510, 520) обработки данных, причем указанная информация указывает на указанное измеряемое одно или несколько химических соединений или элементов.
6. Подводная измерительная система (20, 30, 40) по любому из пп.1-3, в которой указанное устройство (170, 510, 520) обработки данных выполнено с возможностью вычисления одного или нескольких частотных спектров, указывающих на указанный по меньшей мере один сигнал датчика, и отображения и/или регистрации указанного одного или нескольких частотных спектров.
7. Подводная измерительная система (20, 30, 40) по п.6, в которой указанное устройство (170, 510, 520) обработки данных выполнено с возможностью сравнения указанного одного или нескольких частотных спектров с одним или несколькими спектральными эталонами для идентификации одного или нескольких событий, происходящих в подводной области (10).
8. Подводная измерительная система (20, 30, 40) по п.6, в которой указанное устройство (170, 510, 520) обработки данных выполнено с возможностью сравнения одной или нескольких гармоник одного или нескольких сигналов, сгенерированных указанным одним или несколькими гидроакустическими звукоприемниками (200), с одной или несколькими гармониками одного или нескольких сигналов, сгенерированных указанным одним или несколькими датчиками (190) напряжения, для идентификации различия между ними для выполнения характеризации подводной области.
9. Подводная измерительная система (20, 30, 40) по любому из пп.1-3, в которой указанный сенсорный узел (20) содержит инерционный датчик для определения ориентации и/или положения указанного сенсорного узла (20), причем указанный инерционный датчик соединен с возможностью сообщения с указанным устройством (170, 510, 520) обработки данных.
10. Подводная измерительная система (20, 30, 40) по любому из пп.1-3, выполненная с возможностью выполнения пассивного обнаружения одного или нескольких коротких замыканий в электрической цепи в указанной подводной области (10).
11. Подводная измерительная система (20, 30, 40) по любому из пп.1-3, в которой указанный сенсорный узел установлен на подводном сенсорном узле (20), соединенном с возможностью сообщения с вычислительными аппаратными средствами (510), а указанное соединение с возможностью сообщения представляет собой гибкое разъемное соединение, обеспечивающее возможность перемещения указанного сенсорного узла (20) в пределах указанной подводной области (10).
12. Подводная измерительная система (20, 30, 40) по п.11, в которой указанное устройство (170, 510, 520) обработки данных распределено между указанным сенсорным узлом (20) и указанными вычислительными аппаратными средствами (510).
13. Способ осуществления контроля подводной области (10) с использованием подводной измерительной системы (20, 30, 40), содержащей сенсорный узел (20), соединенный с возможностью сообщения с устройством (170, 510, 520) обработки данных,
отличающийся тем, что он включает:
(а) использование одного или нескольких датчиков (190) напряжения указанного сенсорного узла для измерения электрических полей, присутствующих в подводной области (10), для генерирования по меньшей мере одного сигнала датчика, содержащего информацию, указывающую на наличие указанных электрических полей;
(b) использование одного или нескольких гидроакустических звукоприемников (200) указанного сенсорного узла для получения звуковой энергии, созданной в указанной подводной области (10), и включения соответствующей информации в указанный по меньшей мере один сигнал датчика для ее сообщения указанному устройству (170, 510, 520) обработки данных; и
(c) обработку указанного по меньшей мере одного сигнала датчика в указанном устройстве (170, 510, 520) обработки данных для обеспечения возможности осуществления контроля указанной подводной области (10), при этом указанный способ также включает:
(d) выполнение указанного одного или нескольких гидроакустических звукоприемников (200) в виде решетки гидроакустических звукоприемников (200), чьи характеристики звуковой чувствительности при работе имеют одно или несколько предпочтительных направлений чувствительности для обеспечения возможности определения направленности источника звуковой энергии;
(e) использование указанного одного или нескольких гидроакустических звукоприемников (200) в виде фазовой решетки гидроакустических звукоприемников (200); и
(f) осуществление управления с помощью электроники характеристиками полярной чувствительности указанной фазовой решетки от указанного устройства (170, 520, 520) обработки данных.
14. Способ по п.13, в котором указанный один или несколько датчиков (190) напряжения выполняют в виде одной или нескольких пар электродов (195), выполненных с возможностью обеспечения измерения дифференциального напряжения в указанной области (10).
15. Способ по п.14, в котором обеспечивают дифференциальные измерения в нескольких взаимно ортогональных направлениях с использованием указанной одной или нескольких пар электродов (195).
16. Способ по любому из пп.13-15, в котором используют указанное устройство (170, 510, 520) обработки данных для анализа указанного по меньшей мере одного сигнала датчика для определения направления, в котором ориентировано электрическое поле на заданной частоте сигнала, для того, чтобы помочь в определении местоположения источника электрического поля внутри подводной области (10).
17. Способ по любому из пп.13-15, в котором:
(a) обнаруживают одно или несколько химических соединений или элементов, присутствующих в указанной подводной области (10) с использованием одного или нескольких химических датчиков (800), содержащихся в указанной подводной измерительной системе (20, 30, 40); и
(b) включают соответствующую информацию в указанный по меньшей мере один сигнал датчика для сообщения его в указанное устройство (170, 510, 520) обработки данных, причем указанная информация указывает на указанное измеряемое одно или несколько химических соединений или элементов.
18. Способ по любому из пп.13-15, в котором:
(a) используют указанное устройство (170, 510, 520) обработки данных для вычисления одного или нескольких частотных спектров, указывающих на указанный по меньшей мере один сигнал датчика; и
(b) отображают и/или регистрируют указанный один или несколько частотных спектров.
19. Способ по п.18, в котором сравнивают в указанном устройстве (170, 510, 520) обработки данных одну или несколько гармоник одного или нескольких сигналов, сгенерированных указанным одним или несколькими гидроакустическими звукоприемниками (200), с одной или несколькими гармониками одного или нескольких сигналов, сгенерированных указанным одним или несколькими датчиками (190) напряжения, для идентификации различия между ними для выполнения характеризации подводной области.
20. Способ по п.19, в котором сравнивают указанный один или несколько сигналов, сгенерированных указанным одним или несколькими гидроакустическими звукоприемниками (200), с указанным одним или несколькими сигналами, сгенерированными указанным одним или несколькими датчиками (190) напряжения, для осуществления контроля проскальзывания, происходящего в одной или нескольких индукционных ротационных машинах.
21. Способ по п.19, в котором используют указанное устройство (170, 510, 520) обработки данных для сравнения указанного одного или нескольких частотных спектров с одним или несколькими спектральными эталонами для идентификации одного или нескольких событий, происходящих в подводной области (10).
22. Способ по любому из пп.13-15, в котором используют инерционный датчик указанного сенсорного узла (20) для определения ориентации и/или положения указанного сенсорного узла (20), причем указанный инерционный датчик соединяют с возможностью сообщения с указанным устройством (170, 510, 520) обработки данных.
23. Способ по любому из пп.13-15, предназначенный для осуществления пассивного обнаружения одного или нескольких коротких замыканий в электрической цепи в указанной подводной области (10).
| US 7149150 B1, 12.12.2006 | |||
| Электрическая трубчатая печь | 1937 |
|
SU53460A1 |
| Орудийная установка для зенитной стрельбы | 1933 |
|
SU50299A1 |
| WO 2003104844 A1, 18.12.2003. | |||

