Изобретение относится к области геофизических исследований, а именно к устройство зондирования гидросферы и может быть использовано в составе зондирующих стационарных, якорных, дрейфующих и донных станций.
Данное устройство может быть использовано как средство обеспечения подводной навигации.
Известные устройства, представляющие собой зонды [1, 2, 3] или подводные зонды [4, 5, 6] содержат прочный корпус, выполненный в форме цилиндра, внутри которого размещена информационно-измерительная аппаратура, программно-управляющая аппаратура, блок энергопитания и устройство для регулирования плавучести зонда.
Технический результат известных устройств заключается в уменьшении габаритов и массы [2, 3], повышения надежности работы [5, 6], что достигается конструктивным исполнением устройств регулирования плавучести, представляющих собой сложные конструкции, включая устройство для перемещения магнитной жидкости [2, 3], камеру сгорания [5, 6].
Преимуществом данный устройств, в частности устройства [3], которое содержит корпус, включающий в себя балластный блок, состоящий из камеры, верхняя часть которой наполнена рабочей магнитной жидкостью и сообщена с нижней частью этой камеры, где происходит вытеснение или прием жидкого балласта при помощи трубки, средняя часть которой уложена по спирали в статоре асинхронного электродвигателя, который преобразует энергию вращающегося магнитного потока статора в поступательное движение рабочей жидкости, что позволяет уменьшить не только габариты зонда, но и обеспечивает регулирование положительной и отрицательной плавучести зонда, что обеспечивает его перемещение в водной среде в вертикальной плоскости.
Известные устройства включают минимальный состав измерительной аппаратуры, как правило, включающий датчик температуры воды, датчик гидродинамического давления и гидрофон, что обусловлено недостаточным ресурсом блока питания. Это обстоятельство вынуждает использовать измерительную аппаратуру поэтапно, что вносит дополнительные трудности при окончательном анализе измеренных параметров гидросферы.
Наиболее высокую информативность при проведении гидрологических исследований имеют известные устройства, приведенные в источниках [7, 8, 9, 10, 11, 12, 13, 14, 15, 16] дополнительно, обеспечивающие измерение объемного рассеяния звука в воде, измерение профилей звука и их градиентов.
Однако при исследованиях, связанных с определением гидрофизических неоднородностей, применение данных устройств ограничивается низким уровнем генерируемых антенной сигналов, что не является большим препятствием, особенно для малых и средних дистанций зондирования (100-500 м). Однако при исследованиях на больших дистанциях возникает значительные трудности. Как правило, в известных устройствах преобразователь накачки представляет собой 28-ми элементную мозаичную антенную решетку, состоящую из пьезокерамических элементов прямоугольной формы, образующих два набора с различными резонансными частотами. Излучающая поверхность преобразователя накачки имеет форму квадрата со стороной 75 мм. Разностная частота составляет 136 кГц, частоты накачки соответственно 430 кГц и 566 кГц. Разностная частот при этом составляет 50 кГц. Ширина диаграммы направленности антенны находится в пределах 3,5 градуса.
В приемниках давления используются пьезоэлементы, резонансная частота fp которых больше граничной частоты рабочего диапазона.
Для плоской антенной решетки конструктивно оправдано применение плоских элементов, статическая чувствительность которых определяется величиной
γcm=gikl, где gik - пьезоконстанта, ik=33 для поперечного и ik=31 для продольного пьезоэффекта, l - расстояние между электродами.
Так как расстояние между электродами нельзя бесконечно увеличивать, то чувствительность таких элементов в данной антенне недостаточна, что не позволяет максимально использовать всю площадь приема.
Известно также устройство [17], представляющее собой глубоководный зонд, в котором акустические сигналы, излучаемые зондом, формируются параметрическим излучателем звука, который аппаратно разделен на две части (бортовой блок и погружаемый блок). Комплекс глубоководного зонда включает в себя собственно глубоководное устройство, размещенное в двух прочных цилиндрах диаметром 150 мм, длиной около 1 м с вынесенной глубоководной параметрической антенной, приемником звука и датчиком скорости звука и бортовую аппаратуру, с помощью которой производится включение глубоководного устройства и изменение режимов его работы. Глубоководная часть соединяется с бортовой посредством кабеля КСБ - 8 длиной 2000 м, намотанным на лебедку, имеющим семь токоведущих жил в резиновой изоляции и несущую стальную оплетку двойного повива.
Акустические сигналы, излучаемые зондом, формируются параметрическим излучателем звука, бортовой блок формирователя которого задает режим работы параметрической антенны и осуществляет синхронизацию работы всего зонда.
Антенна накачки излучает в водную среду две акустические волны накачки с различными частотами, которые взаимодействуют между собой в процессе распространения. В результате взаимодействия в среде образуется волна с частотой, равной разности частот накачки, которая является и рабочей частотой устройства. Таким образом, в среде формируется антенна волны разностной частоты. Антенна накачки представляет собой два набора пьезокерамических преобразователей, каждый из которых подключен к своему усилителю мощности. Наборы преобразователей расположены в шахматном порядке и залиты полимерным компаундом типа КТ-65.
Излучающий тракт зонда имеет диапазон рабочих (разностных) частот 5-30 кГц (четыре дискретные частоты), частота волн накачки (средняя) 150 кГц, длительность зондирующих импульсов 0,2, 1, 5 мс. При длительности 0,2 м предусмотрено отключение одного из генераторов накачки, при этом излучается только волна накачки с частотой 150±15 кГц, ширина диаграммы направленности по уровню 0,7 от максимального уровня составляет 2,5 градуса во всем диапазоне рабочих частот, диаметр антенны накачки 210 мм. В системе передачи команд применена кодово-импульсная модуляция с частотным разделением сигналов команд и синхроимпульсов.
Недостатком данного устройства является то, что оно не является автономным средством измерения, так как часть аппаратуры размещена на борту судна. Связь и передача команд управления осуществляется по кабелю, что существенно ограничивает радиус действия данного устройства. Кроме того, в известном устройстве не в полной мере обеспечивается однородность акустического поля ввиду того, резонансная частота меньше граничной частоты рабочего диапазона.
Общим недостатком известных устройств является то, что они требуют кабельной связи с диспетчерской станций, в качестве которой как правило используются гидрографические суда, что существенно сужает область исследований и при использовании известных устройств, снабженных кабельной линией, весьма трудоемкой является решение задачи по обеспечению их стабилизации, особенно в районах с сильными подводными течениями.
Задачей настоящего предложения является расширение функциональных возможностей устройств, предназначенных для гидрофизических исследований.
Поставленная задача решается за счет того, что в устройстве, представляющем собой подводный зонд, содержащий контейнер с информационно-измерительной аппаратурой, состоящей из параметрической антенны, приемника звука с приемной антенной и датчика определения скорости звука, программно-управляющей аппаратуры, блоком электропитания и устройством для регулирования плавучести с исполнительным механизмом, размещенным в нижней части контейнера и состоящим из двух частей, нижняя из которых включает в себя внутреннюю секцию, выполненную из гибкого материала, при этом стенки внешней секции перфорированы для сообщения с окружающей водной средой, а верхняя часть заполнена балластоотжимающей магнитной жидкостью и сообщена с нижней частью трубкой с управляемым вентилем, а механизм выполнен в виде электродвигателя, измерительную аппаратуру, включающую датчики гидроакустических сигналов: параметрическую антенну, приемник звука с приемной антенной, датчик скорости звука, в котором контейнер выполнен колоколообразной формы, в верхней части которого размещено сенсорное кольцо с установленными на нем датчиками измерительной аппаратуры, в нижней части контейнер сочленен с гондолой посредством поворотного механизма, снабженного выдвижными клиньями, выполненными в форме ласточкина хвоста, со стороны одной торцевой части гондола снабжена аппарелью, соединенной с выдвижным кронштейном на котором установлены приемопередающие гидроакустические датчики, с другой торцевой стороны гондола снабжена торцевой электрической машиной с дисковыми индукторами и монолитным дисковым ротором, на валу которого установлен гребной винт, нижняя часть гондолы выполнена в виде киля, блок электропитания снабжен электрической микромашиной с постоянными магнитами на роторе, антенный комплекс, включающий датчики гидроакустических сигналов состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны, при этом каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу, дополнительно введены навигационно-управляющий модуль и измеритель глубины.
Новыми отличительными признаками настоящего предложения являются:
- контейнер выполнен колоколообразной формы, в верхней части которого размещено сенсорное кольцо с установленными на нем датчиками измерительной аппаратуры;
- в нижней части контейнер сочленен с гондолой посредством поворотного механизма, снабженного выдвижными клиньями, выполненными в форме ласточкина хвоста;
- со стороны одной торцевой части гондола снабжена аппарелью, соединенной с выдвижным кронштейном на котором установлены приемопередающие гидроакустические датчики;
- с другой торцевой стороны гондола снабжена торцевой электрической машиной с дисковыми индукторами и монолитным дисковым ротором, на валу которого установлен гребной винт;
- нижняя часть гондолы выполнена в виде киля;
- блок электропитания снабжен электрической микромашиной с постоянными магнитами на роторе;
- антенный комплекс, включающий датчики гидроакустических сигналов состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны, при этом каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу;
- дополнительно введены навигационно-управляющий модуль и измеритель глубины.
Совокупность новых признаков из известных устройств не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения критерию патентоспособности "изобретательский уровень".
Сущность изобретения поясняется чертежами.
Фиг.1. Структурная схема устройства включает прочный корпус 1, выполненный колоколообразной формы, в нижней части который сочленен с гондолой 2, внутри корпуса 1 размещены балластный блок 3, информационно-измерительная аппаратура 4, программно-управляющая аппаратура 5, блок электропитания 6, навигационно-управляющий модуль 7, электропривод 8. В гондоле 2 установлена торцевая электрическая машина 9 с дисковыми индукторами и монолитным дисковым ротором с гребным винтом в одном узле с ротором. В верхней части корпус 1 снабжен сенсорным кольцом 10, на котором размещены приемные устройства измерительной аппаратуры.
Гондола 2 соединена с корпусом 1 посредством поворотного механизма 11, обеспечивающего поворот гондолы на 360 градусов. Поворотный механизм 11 приводится в действие посредством электропривода 8. Нижняя часть гондолы 2 выполнена в форме киля. Гондола 2 снабжена аппарелью, которая приводится в действие посредством выдвигающегося кронштейна, сочлененным посредством шарнирно-рычажного механизма с электроприводом. На выдвижном кронштейне установлены приемоизлучающие устройства гидроакустических средств измерения. Посредством шарнирно-рычажного механизма выдвинутый из гондолы кронштейн при соответствующих сигналах управления может занимать положения в диапазоне от 0 до 90 градусов.
В поворотном механизме 11 размещены выдвижные клинья, выполненные в форме ласточкина хвоста и обеспечивающие стабилизацию зонда при влиянии волнения и течения.
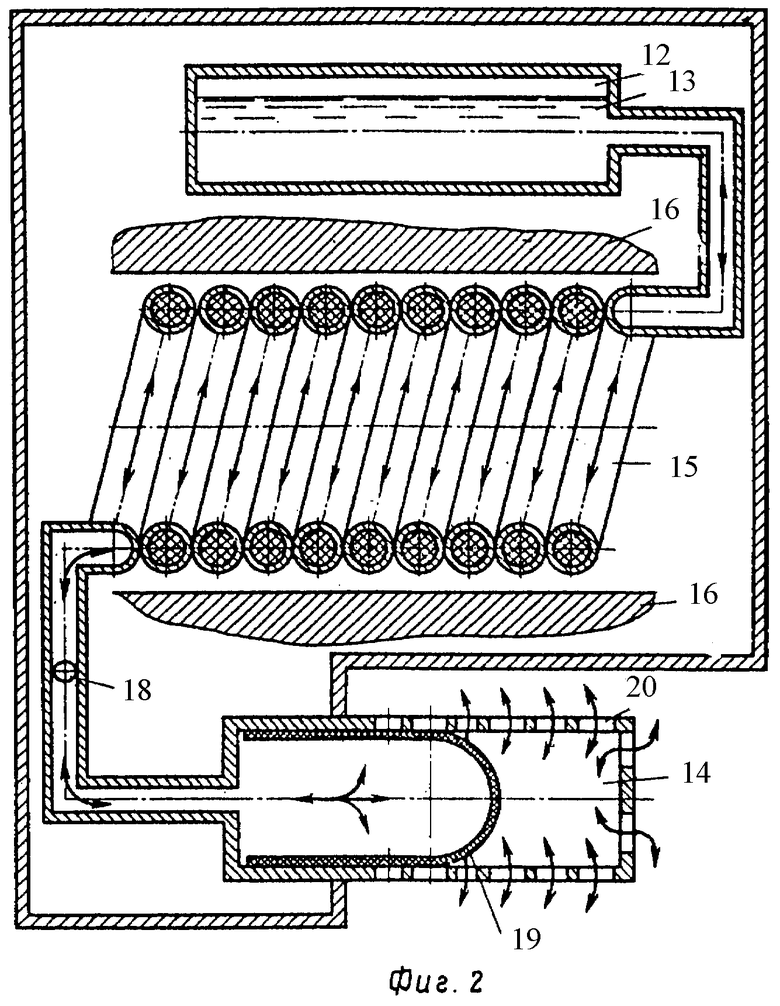
Фиг.2. Балластный блок 3 состоит из верхней части 12 камеры с балластоотжимающей магнитной жидкостью 13, сообщающейся с нижней частью 14, камеры через трубку 15, уложенную по спирали внутри статора 16 электрической машины 17, установленной в блоке электропитания 6. Перед нижней частью 14 камеры размещен управляемый вентиль 18. Нижняя часть 14 разделена вялой мембраной 19 на две секции, стенки внешней секции нижней части 14 камеры имеют отверстия 20 для обеспечения протока балласта (воды окружающей среды) при его отжиме (приеме). Балластный блок 3 в составе зонда закрепляется в нижней части корпуса 1 зонда, имеющего нулевую плавучесть.
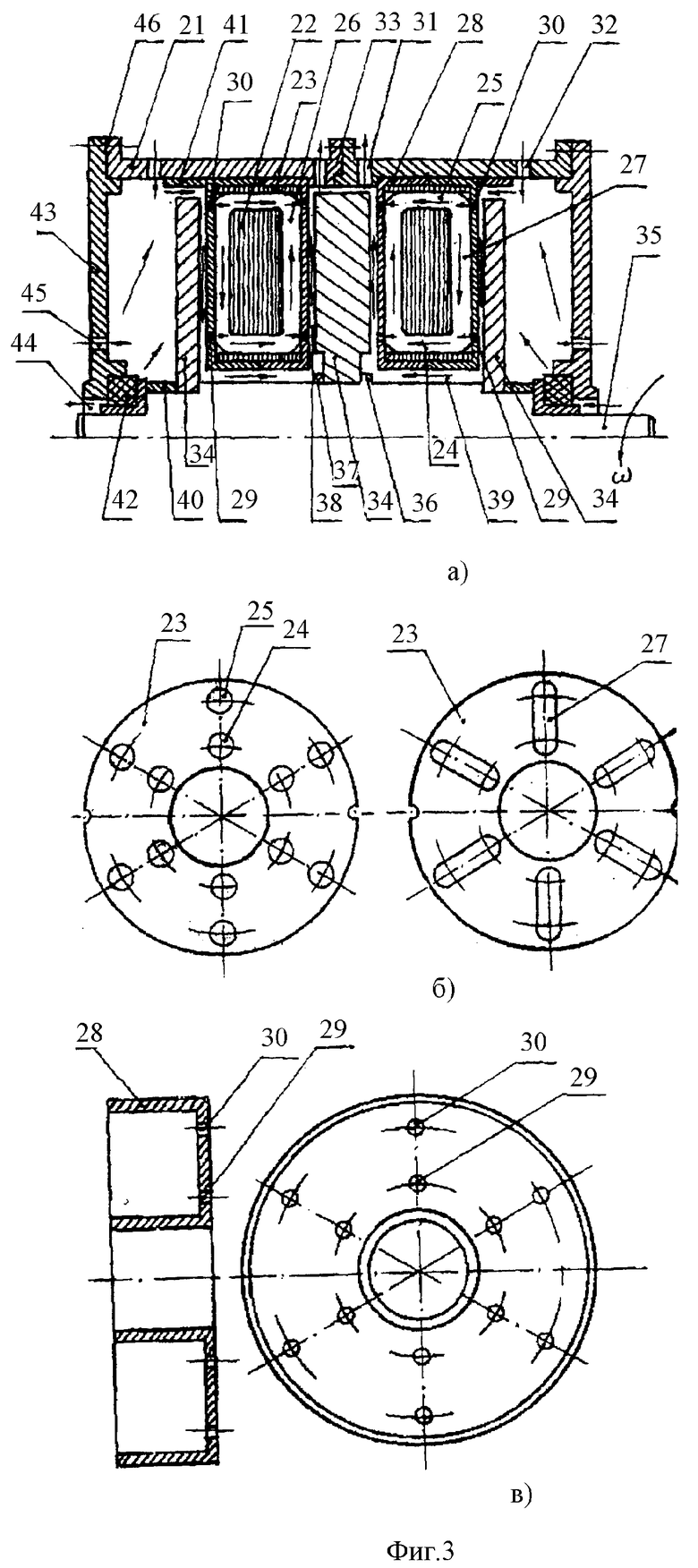
Фиг.3. Торцевая электрическая машина с дисковыми индукторами и монолитным дисковым ротором 9.
Фиг.3а. Продольный разрез.
Фиг.3б. Отштампованный лист пакета индуктора с окнами для укладки активных сторон катушек индуктора.
Фиг.3в. Часть составного защитного экрана из ферромагнитного материала с отверстиями для входа (выхода) охлаждающей морской воды.
Электрическая машина в конкретном исполнении содержит разрезной корпус, состоящий из двух секций 21, выполненных из высокопрочной антикоррозийной стали, в каждую секцию 21 корпуса вмонтирован индуктор 22, который состоит из пакета листов, отштампованных из электротехнической стали в форме дисков 23.
Центральные листы дисков 23 имеют цилиндрические отверстия 24 у вала и на периферии 25, выполняющие функции пазов и предназначены для прохода начала и концов катушек фаз протяжки многофазной обмотки 26, выполненной из обмоточного провода с полимерной изоляцией (из облученного сшитого полиэтилена и фторопласта). Крайние листы дисков 23 имеют сквозные окна 27 для укладки активных сторон катушек фаз обмотки 26, толщина набора этих листов дисков в пакете с обеих сторон индуктора равняется толщине стороны катушки фазы.
Индуктор 22 помещен в составной защитный экран из двух симметричных полуэкранов, выполненных из ферромагнитного материала (магнитной стали), каждая часть полуэкрана от торца имеет плотный механический контакт с пакетом железа индуктора 22 и выполняет функции механической защиты активных частей катушек обмотки 26, а также служит магнитопроводом индуктора для прохода основного магнитного потока. Каждый полуэкран 28 имеет два ряда концентрично расположенных отверстий, один из них 29 у вала, второй 30 на периферии и находящийся у выходов катушек обмотки 26 из пакета сердечника индуктора 22 через отверстия (пазы) 24 и 25. Отверстия 29 одного полуэкрана 28 служат для входа морской воды на охлаждающие обмотки, отверстия 29 и 30 второго полуэкрана для выхода нагретой морской воды.
Каждый редуктор 22 с обмоткой 6 и составным защитным экраном 28 вмонтированы в свою секцию 21 корпуса, каждая секция 21 имеет концентрично расположенные отверстия по окружности поверхности для входа охлаждающей морской воды 32 и для выхода нагретой воды 31. Секции 21 скрепляются жестко между собой посредством замков 33 и болтовых соединений.
Ротор состоит из ряда монолитных дисков 34, выполненных из высокопрочного магнитоэлектропроводящего сплава. Диски 34 охватывают индукторы 22 с обеих сторон, напрессовываются на вал 35 по горячей посадке и фиксируются с помощью упоров 36 на валу 35 и колец 37. Между дисками ротора 34 и индуктором 22 имеется немагнитный рабочий зазор 38, который определяется в зависимости от мощности электродвигателя. Между внутренней цилиндрической поверхностью составного защитного экрана 28 и валом 35 имеется зазор 39 для свободного вращения вала и прохождения охлаждающей морской воды.
Для приостановления контактной коррозии активных частей ротора 34 в морской воде на концах вала имеются втулки-протекторы 40, выполненные из алюминиево-магниевого сплава, а для приостановления контактной коррозии активных частей индукторов 22 на концах электродвигателя в корпусе крайних секций индукторов запрессованы кольца-протекторы 41 из того же сплава.
На концах шеек 35 имеются отшлифованные подвижные втулки из высокопрочной термообработанной антикоррозийной стали. Неподвижные металлокерамические втулки подшипника 42 запрессованы в подшипниковые щиты 43, имеющие свободный зазор 44 относительно вала 35 ротора и ряд концентрично расположенных отверстий 45 у подшипника для входа охлаждающей забортной морской воды. Подшипниковые щиты крепятся к торцам крайних секций 21 с помощью замов по скользящей посадке и болтовых соединений 46.
По сравнению с электродвигателем прототипа данная электромашина имеет более увеличенную мощность за счет каскадного набора дисковых индукторов в общий корпус машины. Функциями электромашины являются, помимо обеспечения работы балластной камеры, также обеспечение работы гребного винта. Аналогом является асинхронная торцевая электрическая машина, приведенная в источнике - патент РФ №2041547 С1.
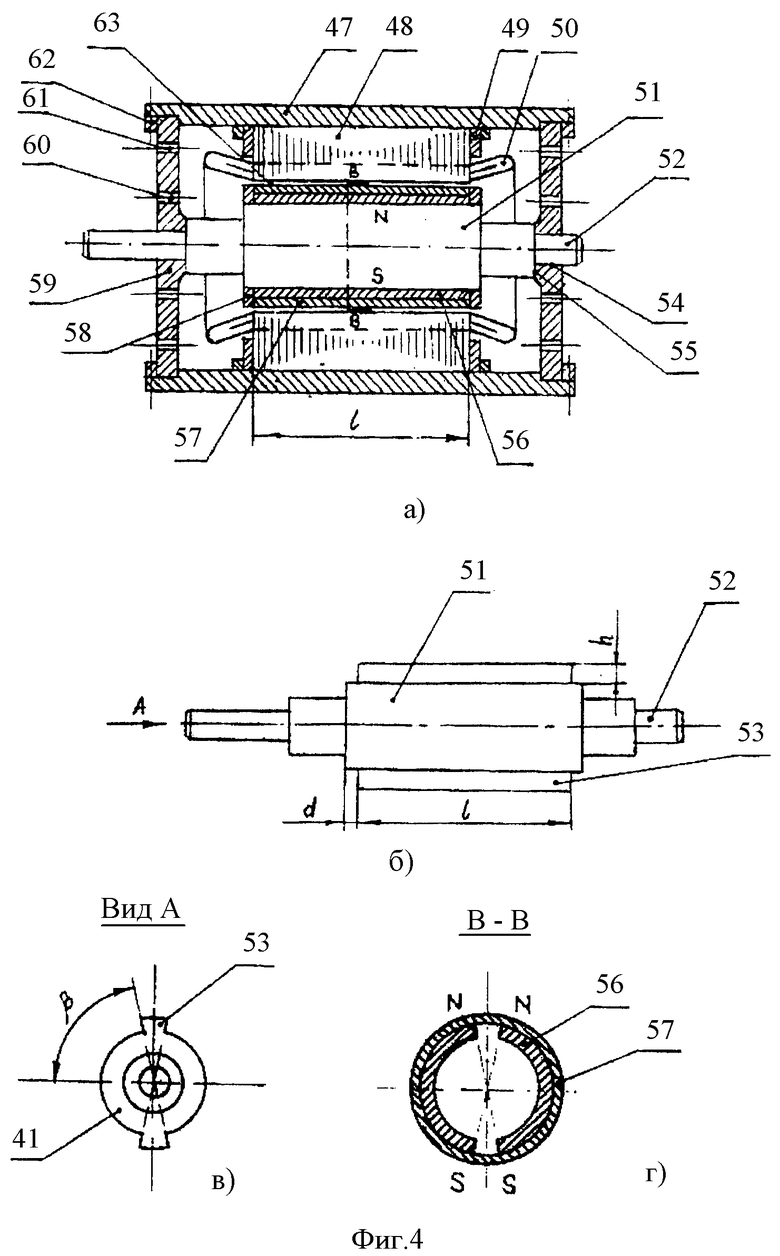
Фиг.4. Электрическая микромашина с постоянными магнитами на роторе.
Фиг.4а. Продольный разрез микромашины.
Фиг.4б. Ротор с выступами без постоянных магнитов и втулки.
Фиг.4в. Вид сбоку по стрелке А.
Фиг.4г. Сечение по В-В.
Электрическая микромашина с постоянными магнитами на роторе содержит корпус 47, который выполняется из антикоррозийного материала, в корпусе запрессован пакет 48 железа статора. По торцам пакета 48 в корпусе 47 запрессованы диски-протекторы 49 из алюминиево-магниево-цинкового сплава, имеющие плотный электрический контакт по всей поверхности с сердечником пакета 48 статора. Диски предназначены для исключения контактной коррозии пакета 48 статора, ротора, подшипниковых щитов и втулки ротора с переводом их в катодное состояние. В пазы пакета 48 статора укладывается многофазная протяжная обмотка 50 из обмоточного провода с полимерной изоляцией. Пазы статора выполнены закрытыми. Ротор 51 с валом 52 и выступами 53 представляет собой (фиг.4в) единую монолитную конструкцию из высокопрочной антикоррозийной немагнитной нержавеющей стали, например, марки ДИ48-ВД или 20Х13, обладающей высокими механическими характеристиками. На термообработанных концах вала 52 имеются отшлифованные опорные 54 и упорные 55 поверхности, выполняющие функции подвижных скользящих частей подшипников. На активную часть ротора 51 между выступами 53, имеющими угол наклона β боковых поверхностей по радиусу радиальной плоскости сечения, вставлены по скользящей посадке с тем же наклоном β контактирующих боковых поверхностей постоянные магниты в виде сегментов 56 (фиг.4г) цилиндрической трубы. Количество сегментов равно числу полюсов, в данном варианте оно равно двум, а их длина равна длине 1 пакета сердечника статора, толщина сегментов h определяется расчетом. На выступы 53 и сегменты 56 напрессовывается втулка 57, равная их длине и выполненная из антикоррозийного немагнитного материала, например 40Х13. С торцов ротора 51 на длинах d (фиг.4б) постоянные магниты 56 и втулка 57 фиксируются крепежными кольцами 58 выполненными из того же материала, что и ротор методом тугой посадки. Подшипниковые щиты 59 с отверстиями 60 для входа охлаждающей забортной воды и отверстиями 61 для выхода воды вмонтированы в замки корпуса 47 статора по скользящей посадке и прижаты с внешней стороны кольцами 62 из нержавеющей стали, которые закрепляются винтами к корпусу 47 со стороны внешней цилиндрической поверхности. Подшипниковые щиты 58, имеющие как и шейки вала 52 ротора отшлифованные опорные 54 и упорные 55 поверхности, выполняют функции неподвижных частей подшипников скольжения, которые имеют по отношению к шейкам вала 52 рабочий зазор.
Между расточкой статора и втулкой 57 ротора 51 имеется немагнитный рабочий зазор 63, определяемый расчетами и габаритами микромашины.
Для уменьшения веса, габаритов и исключения контактной коррозии микромашины корпус 47 и втулка 57 ротора выполнены из углепластика марки УГЭТ-Т или ФУТ на основе углеволокна или углеткани. Подшипниковые щиты 59 выполнены из металлокерамики, а сердечник пакета статора из магнитной антикоррозийной нержавеющей стали марки 00Х13. Аналог приведен в источнике - патент РФ №2041545С1.
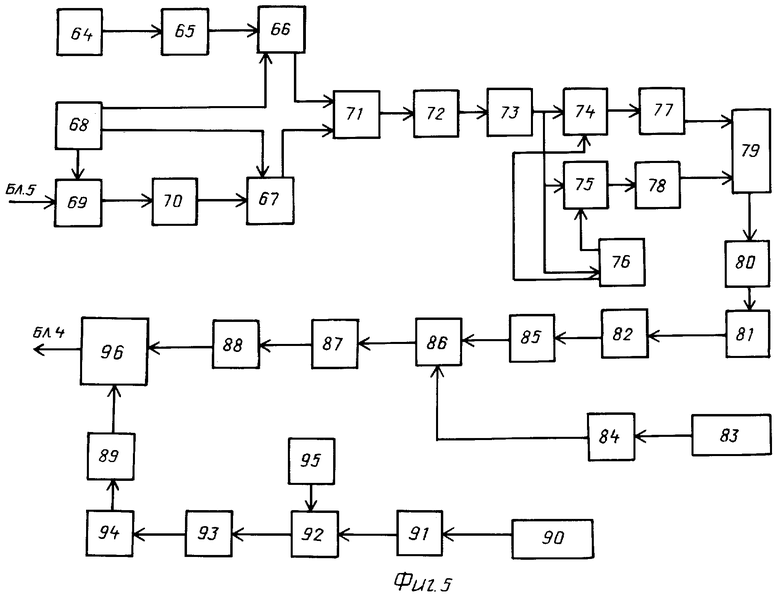
Фиг.5. Блок-схема информационно-измерительной аппаратуры включает синхронизатор 64, формирователь импульсов запуска 65, модуляторы 66 и 67, блок генераторов 68, блок запуска команд 69, преобразователь кода команд 70, сумматор 71, схему разделения сигналов команд и синхроимпульсов 72, дешифратор команд 73, генераторы 74 и 75, импульсный генератор 76, усилители мощности 77 и 78, антенну накачки 79, усилитель высокой частоты 80, преобразователь 81, схему первичной обработки 82, гидрофон 83, усилители 84 и 55, фильтр 86, стробирующее устройство 87, согласующие устройства 88 и 89, датчик скорости звука 90, схему первичной обработки 91, преобразователь 92, частотный детектор 93, фильтр низких частот 94, опорный генератор 95, регистрирующее устройство 96.
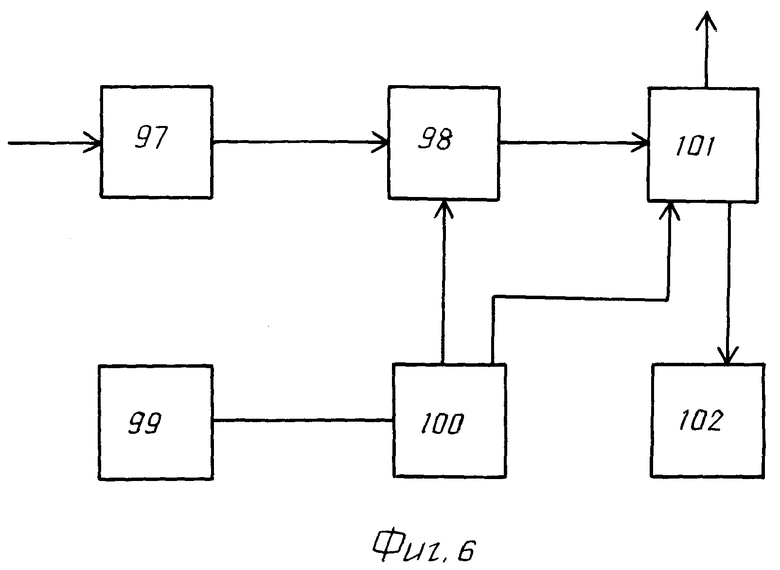
Фиг.6. Программно-управляющая аппаратура 5 включает кодер 97, устройство формирования пакетов 98, устройство формирования алгоритма 99, устройство управления 100, согласующее устройство 101, блок сбора, обработки информации и картирования подводной обстановки 102.
Блок управления 100 состоит из ПЗУ микрокоманд, ПЗУ управления выбором адреса, БИС микропрограммного управления, двух микропроцессоров, ПЗУ, ОЗУ, схемы формирования переносов, буферных регистров, пяти магистралей - магистрали адреса, магистрали микрокоманд, магистрали D, магистрали М, магистрали L аналого-цифровых преобразователей.
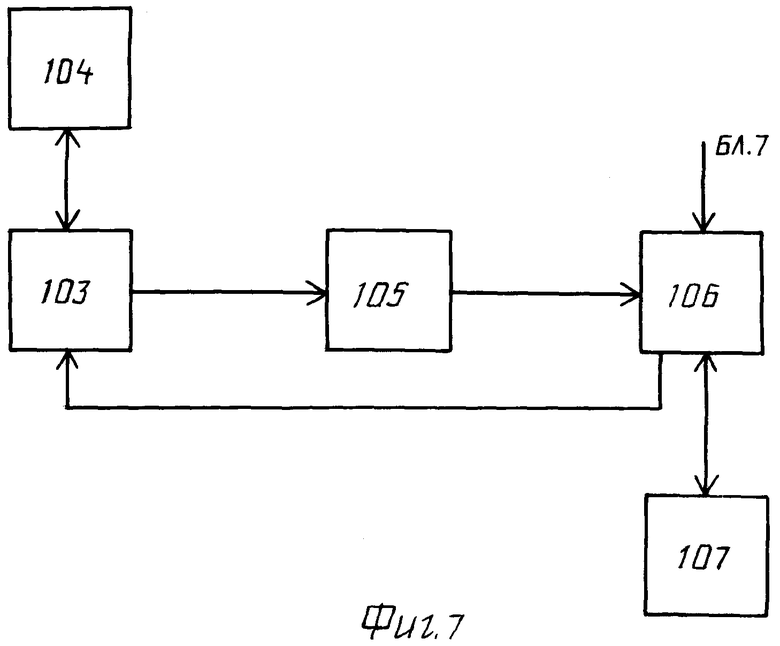
Фиг.7. Навигационно-управляющий модуль 7 состоит из приемоиндикатора 103, антенно-фидерного устройства 104 с антенной, установленной на сенсорном кольце 10, схемы 105 приема и обработки сигналов, контроллера 106, включающего интерфейсы RS232 - до 8 каналов, ЕРР/ЕСР - 1 канал, параллельную 8-ми разрядную шину - 12 каналов, линию управления питанием внешних устройств 5/12 В, до 0,5 А - до 8 линий, SPI до 3 каналов, 12S - до 2 каналов, CAN-канал, USB-1 канал, ультразвуковой канал - 1, оптоволоконный модем-1, радиомодем-1, FLASH-память до 4 Гбайт, часы реального времени, входные фильтры аналоговых каналов, микропроцессор, а также систему динамической стабилизации 107 зонда, содержащую блок датчиков рассогласований по продольному, поперечному и вертикальному перемещениям зонда при внешних воздействиях, гироазимутгоризонткомпас, преобразователь координат, следящие устройства.
Аналогом системы динамической стабилизации 107 зонда являются устройства, приведенные в описаниях к авторским свидетельствам SU №1308040 и №1360405.
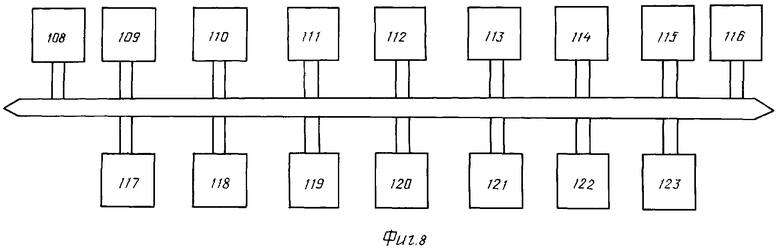
Фиг.8. Блок сбора, обработки информации и картирования подводной обстановки 102 состоит приемных регистров 108, блока системной магистрали 109, усилителя 110, диспетчера памяти 111, операционного блока 112, блока управления потоком команд 113, блока микропрограммного управления 114, блока прерываний 115, выходных регистров 116, датчика определения солености 117, датчиков температуры воды и воздуха 118, измерителя глубины 119, датчиков гидростатического 120 и атмосферного 121 давления, измерителя параметров ветра 122, схемы обработки и картирования подводной обстановки 123.
В качестве датчика атмосферного давления 112 использован датчик РТВ-10 с пределами атмосферного давления 600-1100 гПа и точностью измерения 1 гПа. С атмосферой датчик соединяется тонкой эластичной трубкой, проходящей внутри герметичного разъема и выходящий на траверсу, где расположена антенна 10.
В качестве датчика температуры воздуха 109 использован датчик ТСП-002-03 с диапазон измерения от -50 до +60 градусов С, с погрешностью равной ±0,15 градусов С. Этот же датчик используется и для измерения температуры воды в диапазоне от -2 до +32 градусов.
В качестве датчика давления использован датчик, имеющий диапазон измерения давления от 0 до 10 м, с погрешностью 0,1% и диапазон измерения температуры воды от -2 до +32 градусов С, с погрешностью 0,05 градуса С.
Фиг.10. Схема 97 приема и обработки сигналов включает формирователь 124 характеристики направленности, широкополосный фильтр 125 с коррекцией амплитудно-частотной характеристики, ограничитель 126, АЦП 127, узкополосный фильтр 128, детектор 129, интегратор 130, пороговую схему 131, широкополосный фильтр 132 с коррекцией амплитудно-частотной характеристики, ограничитель 133, узкополосные фильтры 134 и 135, детекторы 136 и 137, интеграторы 138 и 139, схему 140 выбора максимума, решающую схему 141. Блоки 124÷131 обеспечивают прием сигналов от информационно-измерительной аппаратуры 4, а блоки 132÷141 предназначены для обработки принятых сигналов для обеспечения навигационного координирования подводных объектов.
Данная схема обеспечивает связь по гидроакустическому каналу связи, при работе зонда в районах оснащенных донными гидроакустическими маяками или береговой диспетчерской станцией.
В качестве сигналов местоположения использованы тональные сигналы с частотой 3 кГц, излучаемого как в автоматическом режиме по специальной программе, так и в режиме запроса.
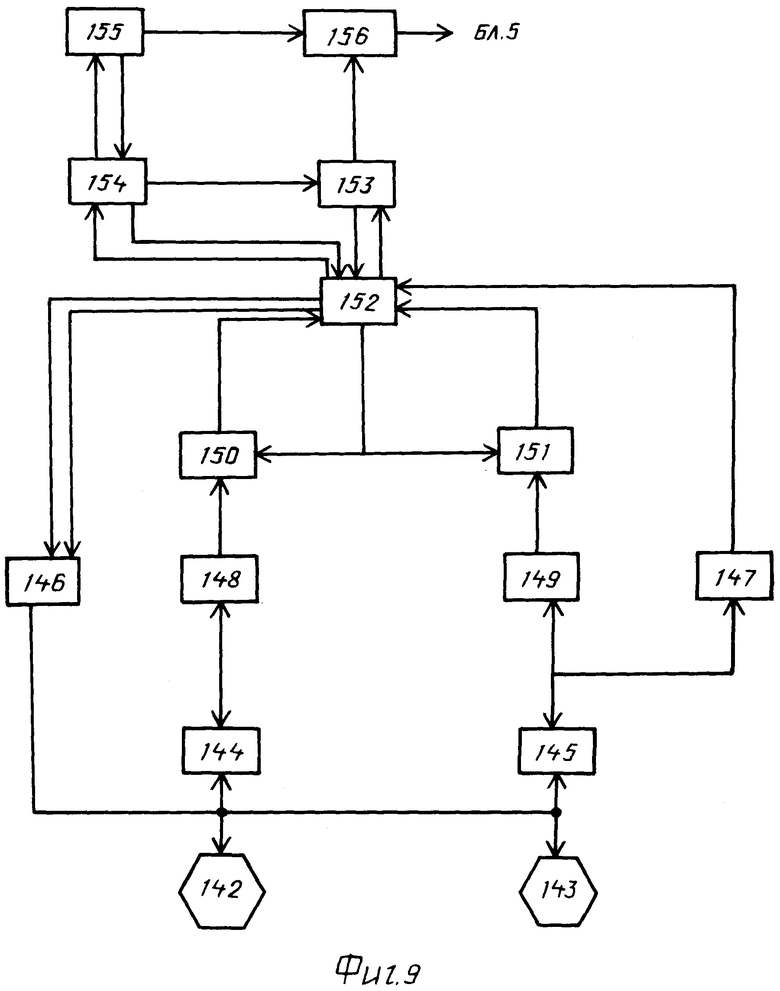
Фиг.9. Измеритель глубины 110 включает пьезокерамические акустические преобразователи 142 и 143, образующие антенну, предназначенную как для излучения, так и для приема сигналов. В цикле излучения преобразователи 142 и 143 соединены параллельно, а во время цикла приема эхо-сигналов они работают независимо друг от друга. Коммутаторы 144 и 145, построенные по принципу амплитудных ограничителей и выполняют стандартные функции, заключающиеся в том, что во время импульса посылки они обеспечивают подключение преобразователей 142 и 143 к усилителям мощности 146 и 147 и одновременно защищают приемные усилители 148 и 149 от сигнала излучения. В интервалы времени, отведенные для приема эхо-сигналов, коммутаторы 144 и 145 обеспечивают прохождение эхо-сигналов на приемные усилители 148 и 149. Уровень сигналов на выходе приемных усилителей таков, что позволяет провести квантование сигналов по времени, которое осуществляется устройствами квантования 150 и 151 по времени, с которых сигналы поступают через синхронизатор 152 на корреляционное устройство 153. Синхронизатор 152 также выдает на устройства квантования 150 и 151 командные сигналы для проведения операции квантования и вырабатывает для усилителей мощности 146 и 147 сигнал несущей частоты и команду на излучение, а также необходимые сигналы для блока управления 154. Корреляционное устройство 153 определяет время задержки между сигналами. В блоке обработки 155 по промежутку времени между излучением акустического импульса и приемом эхо-сигнала в соответствии с зависимостью Н=ct/2 определяется глубина Н от днища зонда до дна, где с - скорость распространения звука в воде, t - промежуток времени между излучением и приемом отраженного сигнала.
В блоке обработки 156 определяется скорость движения зонда в горизонтальной плоскости. Так как в данном устройстве расстояние Х0 между излучающей и приемной антеннами известно, то измерив временной сдвиг ττ сигналов, можно определить скорость зонда Vз=Х0/ττ.
Нахождение этого сдвига производится путем корреляционной обработки принятых сигналов. Для этого в тракт сигнала одной из антенн вводится переменная временная задержка и производится вычисление взаимно-корреляционной функции огибающих сигналов двух разнесенных антенн и отслеживается ее максимальное значение.
Аналогами измерителя глубины и скорости являются устройства, приведенные в источниках информации: New Ships/Die Neubauten, 1974, XII, Jahrgang 19, №12, p.344. Судовые измерители скорости/Хребтов А.А., Кошкарев В.Н., Осюхин Б.А., Виноградов К.А., Чернявец В.В. - Л.: Судостроение, 1978, с.172. Гидроакустический корреляционный лаг / К.А.Виноградов, В.Н.Кошкарев, Б.А.Осюхин, Г.В.Яковлев // Судостроение за рубежом, 1977, №7. Sal-Accor-Marine Log. Description, Junger Instrument, Stockholm, Sweden, 1976.
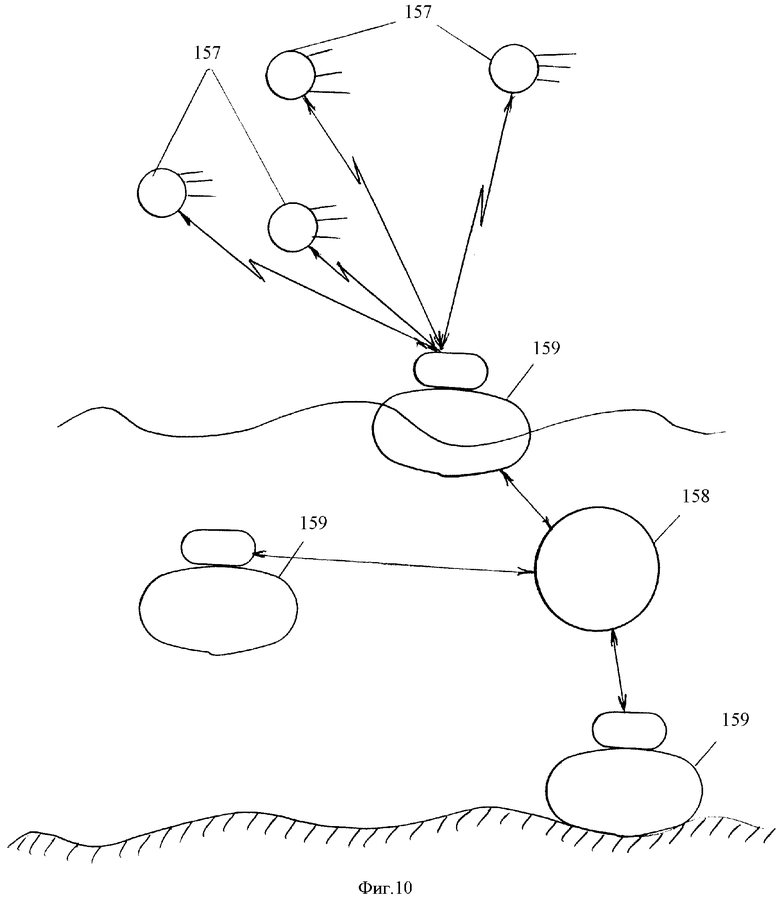
Фиг.10. Схема формирования навигационной базы, где показаны навигационные спутники 157, подводный объект 158, зонд 159.
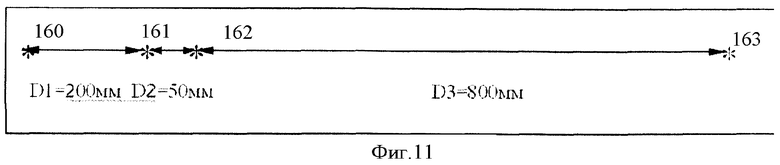
Фиг.11. Взаимное расположение приемников секции антенны, где позициями 160, 161, 162, 163 обозначены секции антенны.
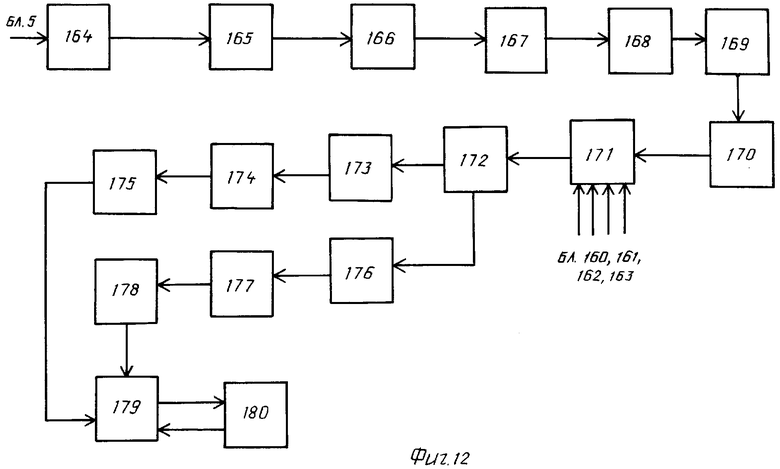
Фиг.12. Функциональная схема приема сигнала "включение", которая включает формирователь характеристики направленности 164, широкополосный фильтр 165 с коррекцией амплитудно-частотной характеристики, ограничитель 166, узкополосный фильтр 167, детектор 168, интегратор 169, пороговую схему 170, широкополосный фильтр 171 с коррекцией амплитудно-частотной характеристики, ограничитель 172, узкополосный фильтр 173, детектор 174, интегратор 175, узкополосный фильтр 176, детектор 177, интегратор 178, схему выбора максимума 179, решающую схему 180, образующие функциональную схему обработки сигналов.
Так как для систем передачи информации, основанных на использовании тональных сигналов, помехоустойчивость системы определяется помехоустойчивостью обнаружителей сигнала "Включение" и обнаружителей информационных сигналов, для обнаружения сигнала "Включение", представляющего собой отрезок гармонического колебания, использован метод неоптимального некогерентного приема, обеспечивающий широкополосный прием с интегрированием после детектора 168.
Функционально схема приема сигнала "включение" включает формирователь характеристики направленности 164, обеспечивающий предварительное усиление и формирование ненаправленного пространственного канала с антенны спутниковой связи при нахождении зонда на водной поверхности, широкополосный фильтр 165 с полосой ΔFш, ограничитель 166 и узкополосный фильтр 167 с полосой ΔFy, образующие схему, обеспечивающую, при условии ΔFш/ΔFу>>1, стабилизацию помехи и подавления импульсной (широкополосной) помехи, и обеспечивает выравнивание спектра помехи на входе ограничителя 166, узкополосный фильтр 167, обеспечивающий формирование рабочих частот, детектор 168, имеющий линейную характеристику, интегратор 169, представляющий собой фильтр нижних частот с эффективной полосой пропускания ΔFu=1/Т, где Т=2 сек (длительность символа), пороговую схему 170, построенную на основании критерия Неймана-Пирсона, поскольку вероятность появления на ее входе сигнала существенно ниже вероятности его отсутствия. Функциональная схема обработки сигнала включает широкополосный фильтр 171 с полосой ΔFш, ограничитель 172 и узкополосный фильтр 173 с полосой Δfy, которые образуют схему, обеспечивающую, при условии ΔFш/ΔFу>>1, стабилизацию помехи и подавления импульсной (широкополосной) помехи и выравнивание спектра помехи на входе ограничителя 172, детектор 174, имеющий линейную характеристику, интегратор 175, который представляет собой фильтр нижних частот с эффективной полосой пропускания ΔFu=1/Т, где Т=0,5 сек (длительность символа), схему выбора максимума 179, обеспечивающую отбор максимального сигнала для последующего сравнения его с заданным порогом, решающую схему 180, построенную на основании критерия идеального наблюдателя, поскольку весомость ошибок типа "ложная тревога" и типа "пропуск сигнала" можно считать одинаковым, то порог в схеме выбран из условия минимизации полной вероятности ошибки, при этом после превышения порога в схему выбора максимума 140 поступает команда на отключение канала с максимальным сигналом.
Таким образом, обработка сигнала при приеме сообщения сводится к обнаружению отдельных тональных сигналов с вероятностями F и D такими, чтобы сумма F+(1-D) не превышала 0,01, причем F+1-D.
Навигационно-управляющий модуль 7 при нахождении зонда на поверхности предназначен для приема командных сигналов на включение той или иной аппаратуры через программно-управляющую аппаратуру 5, установленную на зонде. Кроме того, навигационно-управляющий модуль 7 принимает от спутниковой навигационной системы координаты местонахождения зонда при его нахождении на водной поверхности в географической системе координат посредством приемоиндикатора 103 и антенно-фидерного устройства 104. Посредством гироазимутгоринткомпаса системы динамической стабилизации 107 вырабатываются курс К, углы качки (θ, ψ), угловые скорости качек и рыскания, угловые ускорения качек и рыскания, линейные ускорения. Навигационно-управляющий модуль 7 также обеспечивает выработку координат (φ, λ), скорость перемещения по водной поверхности по приращению координат, высоту волн 3% обеспеченности в соответствии с известными алгоритмами, которые заключаются в следующем (см. например, описание к патенту РФ №2270464).
В основу измерения профиля волнения положен интегральный метод, основанный на косвенном определении профиля волнения исходя лишь из данных о вертикальной скорости перемещения зонда на водной поверхности в соответствии с зависимостью
где S - перемещение устройства за время Т;
V(t) - скорость перемещения зонда.
Перемещение устройства в конкретный момент определяют по формуле
где S(t) - положение устройства в текущий момент;
S0 - положение устройства в предыдущий момент;
а - ускорение.
Данный метод позволяет полностью исключить из обработки грубые измерения высоты и получить информацию о движении зонда лишь по высокоточным данным о скорости.
Для исключения сильно зашумленных кодовых измерений высоты фазовыми скоростями перемещений зонда применен субоптимальный фильтр. Текущая оценка Zi с помощью любого линейного фильтра в виде суммы прогноза Zi и фильтрованной оценки текущего измерения:

где Zi eci - текущее значение измерения;
α - коэффициент передачи, определяет постоянную времени фильтра α=1τс;

Поскольку оценка Z формируется в спутниковых приемниках из высокоточных фазовых измерений, воспроизводящих динамику зонда с миллиметровой (субмиллиметровой) точностью формула (2) определяет самый высокоточный прогноз для любого линейного фильтра спутниковых измерений. Подставляя (2) в (1) получим α-БИХ фильтр, оптимальным образом сглаживающий кодовые измерения фазовыми:

Результатом обработки являются оптимальным образом сглаженные кодовые измерения, однако данный фильтр не может убрать постоянный низкочастотный тренд ошибок высотных измерений в силу достаточно большой величины α. Для исключения этого тренда достаточно применить к уже сглаженной оценке этот же самый фильтр повторно, но с большим коэффициентом α (глубокое сглаживание). Анализ низкочастотного шума позволяет сделать вывод, что компромиссным вариантом будет выбор α=0,151/с. Далее выполняется центрирование (вычитание из оценки тренда). После исключения тренда производится вычисление дисперсии полученной центрированной оценки:
где Hi - значения центрированного тренда,
N - количество значений в выборке.
Амплитуда колебаний выводится через дисперсию А=2σ2, где А - искомая амплитуда, σ -средняя квадратическая ошибка.
Далее производится вычисление периода волн, методом подсчета числа пересечений волновым профилем нулевой линии.
При этом посредством спутниковой навигационной системы типа СН-3800 определяется вектор скорости течения водной поверхности по изменению горизонтального перемещения зонда.
Высота волны hi определяется как hi=r1+r2, где r1 - высота предыдущего полупериода, r2 - высота последующего полупериода. При наличии нескольких одинаковых максимальных амплитуд за полупериод для расчета высоты волны используется любая из них. После определения значений высот волн и их количества в реализации рассчитывается среднее значение высоты волны - 
где m - число волн за время 20 минут.
Для определения высоты волны 3% обеспеченности из массива высот волн отбирается 20 максимальных волн, которые располагаются по мере убывания с присвоением порядкового индекса от 1 до 20, начиная с максимальной амплитуды. Затем вычисляется индекс 3% обеспеченности К3%=3m/100. Высота волны, соответствующая этому индексу, будет трехпроцентной.
При установке большой группы зондов средства связи могут также включать ретранслятор, который осуществляет прием радиосигнала от дрейфующей станции в диапазоне ДМВ (401-403 МГц), объединение с сигналами других дрейфующих станций в общий групповой сигнал и одновременную передачу на наземные пункты приема в двух стволах диапазона СМВ (4/6, 7/8 ГГц), а при необходимости в состав средств связи может входить и береговая станция спутниковой связи, которая осуществляет прием излучаемого группового сигнала ретранслятора и содержит аппаратуру восстановления сообщений, включающую декодер и устройство обработки и восстановления сообщений, запоминающее устройство, устройство управления.
При нахождении в подводном положении и при движении зонда навигационно-управляющий модуль 7 вырабатывает счислимые координаты по данным гироазимутгоризонткомпаса и измерителя глубины 119.
Балластный блок 3, как и в прототипе [3], закреплен в нижней части корпуса зонда и его работа заключается в следующем. По команде программно-управляющей аппаратуры 5 от блока электропитания 6 подается переменное напряжение, причем фазировка электропитания осуществляется таким образом, что вращение магнитного поля направлено от верхней части 12 камеры к нижней части 14 камеры.
Магнитная жидкость 13 под напором вращения магнитного поля статора перетекает из верхней части 12 камеры, оказывая давление на растягивающуюся вялую мембрану 19 и отжимая балласт из внешней секции нижней части 14 камеры через отверстия 20, при этом зонд приобретает положительную плавучесть и всплывает. После заполнения нижней части 14 камеры магнитной балластоотжимающей жидкостью 13 по команде программно-управляющей аппаратуры 5 вентиль 18 запирается, т.е. для достижения положительной плавучести зонда используется энергия вращающегося магнитного поля статора асинхронного электродвигателя переменного тока, отжимающим балласт агентом является магнитная жидкость для зондирования средних (сотни метров) глубин гидросферы. Балластный блок 3 монтируется в нижней части контейнера зонда, который после всплытия зонда остается ниже ватерлинии, т.е. под водой.
Для погружения зонда по команде программно-управляющей аппаратуры 5 вентиль 18 открывается и под давлением окружающей водной среды на вялую мембрану 19 магнитная жидкость отжимается из внутренней секции нижней части 14 камеры через трубку 15 в верхнюю часть камеры, что приводит к увеличению плотности зонда. Он приобретает отрицательную плавучесть и погружается.
Ввиду того, что блок электропитания 6 имеет ограниченный ресурс, он снабжен электрической микромашиной с постоянными магнитами на роторе (фиг.4), которая используется в двух режимах, как в режиме генератора, так и в режиме двигателя. При работе в режиме генератора она обеспечивает питанием все остальную аппаратуру. При работе в режиме двигателя она через червячно-зубчатую передачу связана с поворотным механизмом 11, представляющим собой дифференциально-фрикционный механизмом с диском, на котором установлена электрическая микромашина 9 с гребным винтом. Поворотный механизм 11 предназначен для разворота двигателя в горизонтальной плоскости для изменения направления движения зонда в горизонтальной плоскости в диапазоне 360 градусов.
Размещение данной электрической микромашины в нижней части камеры обусловлено обеспечением его охлаждения в период работы.
Работа электрической микромашины 9 заключается в следующем: после размещения на полигоне зонда или группы зондов по команде через спутниковый канал связи программно-управляющей аппаратурой 5 подается команда на подачу питания и включение устройства. При этом гребной винт будет вращаться с постоянной частотой вращения в одну сторону на передвижение зонда вперед. Максимальная скорость зонда будет, когда отверстия насадки и отверстия кольца совмещены, т.е. полностью открыты для всасывания забортной воды. При этом отверстия в крышке открыты для выхода струи воды от винта, т.е. диски заслонки находятся между отверстиями, это достигается поворотом электропривода на угол β=45 градусов.
Оптимальным пропульсивным КПД винта будет при условии, когда количество всасываемой воды равно количеству вталкиваемой воды. Для уменьшения скорости передвижения посредством электропривода уменьшают угол β от 45 до 0 градусов, закрывая отверстия в крышке, тем самым уменьшая выход струи воды. При β=0 диски закроют отверстия в крышке и прекратится выход струи воды, упор винта будет отсутствовать и скорость передвижения зонда становится равной нулю, при этом гребной винт будет работать в кавитационном режиме вхолостую и через отверстие в корпусе насадки и отверстие кольца вода будет входить и выходить. Так как отверстия и концентричны, то электродвигатель, подвешенный на корпусе зонда, будет находиться в статическом равновесии. Манипулируя закрытием и открытием отверстия на насадке и на крышке, обеспечивается возможность регулировать скорость передвижения зонда в широком диапазоне при выполнении гидрофизических работ на акватории полигона. Реверс осуществляется посредством поворотного устройства 11.
Схема информационно-измерительной аппаратуры 4 работает следующим образом. Акустические сигналы, излучаемые зондом, формируются антенной накачки 79 (фиг.5). Формирователь импульсов запуска 65 задает режим работы антенны 79 и осуществляет синхронизацию работы всей гидроакустической схемы. Формирователь импульсов запуска 65 осуществляет нормировку импульсов по амплитуде и длительности. Блок генераторов 68 вырабатывает сигналы с частотами 1,9 кГц для кодировки импульсов команд и 6,3 кГц для кодировки импульсов синхронизации, а также импульсы для формирования сигналов команд. В блоке запуска команд 69 осуществляется набор кода команды и посылка кода. Код команды в преобразователе кода команд 70 преобразуется в соответствующую набранному коду последовательность импульсов. Последовательности импульсов кода и импульсы синхронизации заполняются в модуляторах 66 и 67 колебаниями соответствующих частот, суммируются в сумматоре 71 и поступают на схему разделения сигналов команд и синхроимпульсов 72. Далее синхроимпульсы поступают на запуск импульсного генератора 76, а последовательность командных импульсов - на дешифратор команд 73, в котором происходит разделение кодов для управления частотой генераторов 74 и 75 и длительностью посылки, вырабатываемой импульсным генератором 76. Сигналы с генераторов 74 и 75, промодулированные импульсами импульсного генератора 76, поступают на усилители мощности 77 и 78, а затем на антенну накачки 79, которая излучает в водную среду две акустические волны накачки с разными частотами, которые взаимодействуют между собой в процессе распространения. В результате взаимодействия в среде образуется волна с частотой, равной разности частот накачки, которая и является рабочей частотой.
Антенна накачки 79 представляет собой два набора пьезокерамических преобразователей, каждый из которых подключен к своему усилителю мощности, и выполнена в форме цилиндра с тангенциальной поляризацией, а внутренняя поверхность цилиндра выполнена экранированной, цилиндр помещен в отражатель с наклонной образующей к основанию под углом 45 градусов.
В системе передачи команд применена кодово-импульсная модуляция с частотным разделением сигналов команд и синхроимпульсов.
Сигналы с антенны накачки 79 поступают на усилитель высокой частоты 80 и далее на преобразователь 81, который необходим для снижения частоты в область рабочих частот схемы первичной обработки 82. Далее сигналы через усилители 84 и 85 поступают на фильтр 86 и через стробирующее устройство 87 и согласующие устройства 88 и 89 поступают на регистрирующее устройство 96 для измерения отраженных акустических сигналов.
Гидрофон 83 принимает сигналы, рассеянные в водной среде. При этом один из каналов антенны накачки 79 работает в режиме излучения на частоте 150±15 кГц, а второй работает в приемном режиме. Второй канал соединен с фильтром низких частот 94, через который сигналы поступают на регистрирующее устройство 96.
Измерение скорости звука осуществляется посредством датчика скорости звука 90, частотно-модулированные сигналы с которого через схему первичной обработки 91 поступают на преобразователь 92, на который поступают также сигналы с опорного генератора 95. Далее сигналы поступают на частотный детектор 93, а затем проходят на фильтр низких частот 94, который обрезает высокочастотные составляющие несущей частоты. Сигналы, пропорциональные скорости звука, с фильтра низких частот 94 через согласующее устройство 89 поступают на регистрирующее устройство 96.
Датчик скорости звука 90 представляет собой циклический скоростемер (см. например: Гусев М.Н., Яковлев Г.В. Гидроакустические доплеровские лаги / Судостроение за рубежом, 1976, №5, с.53-57. В.А.Воронин, С.П.Тарасов, В.И.Тимошенко. Гидроакустические параметрические системы, Ростов-на-Дону. РосИздат, 2004, с.299-302), сигнал с которого представляет колебания с постоянной амплитудой и изменяющейся частотой, причем изменение частоты соответствует изменению скорости звука.
Посредством данных акустических средств выполняются измерения объемного рассеяния звука в воде и измерения профилей скорости звука и их градиентов. Ввод новых устройств и узлов позволяет использовать зонд в качестве автономного средства зондирования гидросферы на разных горизонтах водной поверхности с получением первоначальной информации о состоянии гидросферы в существенно большем объеме, чем посредством известных аналогичных устройств.
Используемый состав гидроакустических средств позволяет также посредством предлагаемого устройства решить и такую важную задачу, как обеспечение навигации подводных объектов, которая решается, например, с использованием гидроакустической синхронной дальномерной навигационной системы [18], которая содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещением на объекте навигации гидроакустического передатчика, генератора синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, М•N блоков преобразования временных интервалов в дистанции по N в каждом из каналов из М, М блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации.
В данной системе реализован способ навигации подводного объекта, включающий размещение гидроакустических ответчиков на дне водоема, создание навигационной базы из М гидроакустических приемоответчиками с различными частотами ответа, калибровку с помощью внешних средств обеспечения навигационной базы, посредством гидроакустического передатчика, размещенного на подводном объекте, измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. Для получения достоверных результатов измерений измеренные дистанции усредняют.
Навигационная база таких систем, предварительно устанавливаемая на дне акватории, как правило, состоит из 12-16 маяков ответчиков и предварительно калибруется в относительных и в географических координатах (относительная и абсолютная калибровки) с помощью судна обеспечения оснащенного бортовым комплексом спутниковой и гидроакустической системами навигации. После выработки своего энергетического ресурса маяки-ответчики заменяются, при этом производится новая калибровка донной навигационной базы. Данный способ позволяет обеспечить географическую привязку подводного аппарата в пределах площади до 100 квадратных километров и протяженностью до 50 километров.
Использование известного способа навигации подводных аппаратов требует значительных затрат судового времени, большого количества донных маяков-ответчиков с длительным сроком автономности, ограничивает радиус действия подводного аппарата дальностью связи с донной навигационной базой. С учетом того, что подводные станции подвержены влиянию гидрологических и литодинамических факторов, то для получения достоверных результатов навигации подводных объектов требуется калибровочные работы выполнять не только при установке и снятии подводных станций, но и в период их эксплуатации при изменении внешних факторов.
При проведении научно-исследовательских работ с применением автономных подводных обитаемых аппаратов, выполнении оперативно-тактических задач подводными аппаратами на морских полигонах протяженностью до тысяч километров и площадью десятки тысяч квадратных километров особое значение приобретает оперативное высоконадежное обеспечение этих работ без использования судна обеспечения.
При установке большой группы зондов средства связи могут также включать ретранслятор, который осуществляет прием радиосигнала от дрейфующей станции в диапазоне ДМВ (401-403 МГц), объединение с сигналами других дрейфующих станций в общий групповой сигнал и одновременную передачу на наземные пункты приема в двух стволах диапазона СМВ (4/6, 7/8 ГГц), а при необходимости в состав средств связи может входить и береговая станция спутниковой связи, которая осуществляет прием излучаемого группового сигнала ретранслятора и содержит аппаратуру восстановления сообщений, включающую декодер и устройство обработки и восстановления сообщений, запоминающее устройство, устройство управления.
Обработка сообщений включает помехоустойчивое кодирование, разбивку каждого сообщения на пакеты с длительностью, зависящей от состояния взволнованной поверхности, передачу пакетов сообщения на ретранслятор по алгоритму, автоматически формируемому в зависимости от морского волнения, которое определяется посредством спутниковой навигационной системы в соответствии с известными алгоритмами (см. например, описание к патенту РФ №2254600).
Применение предлагаемого зонда, оснащенного приемником спутниковой навигации и аппаратурой гидроакустического канала связи, в качестве навигационных маяков, расположенных на морской поверхности, позволяет обеспечить высокоточную навигацию для подводных объектов.
Очевидно, что при нахождении зонда на морской поверхности не требуется проведения относительной и абсолютной калибровок полигона, который необходим при использовании донных гидроакустических маяков-ответчиков, так как оснащение его приемником спутниковой навигации позволяет ему «знать» свои географические координаты в реальном масштабе времени с высокой точностью (например, точность определения координат посредством спутникового навигационного измерительного модуля типа СПИМ разработки российской фирмы «Навис» не хуже 5 метров). Навигация подводного объекта относительно дрейфующего зонда или базы из дрейфующих зондов может осуществляется как в режиме с длинной, ультракороткой базой (ДБ и УКБ), так и в комбинированном режиме ДБ/УКБ.
Подводный объект оснащается соответствующими режиму работ гидроакустическими приемо-передающими антеннами, навигационным контроллером и навигационным программно-математическим обеспечением, аналогичному в устройстве [18]. При этом зонд работает в режиме «запрос-ответ» и в режиме «пингер» (маяк). В режиме с длинной базой для определения координат подводного объекта используются сигналы минимум от 3-4 зондов (аналогично как в спутниковой GPS) и решается триангуляционная задача. При этом площадь или протяженность зоны действия системы зависит от энергетической дальности действия гидроакустической связи, количества зондов, глубины расположения подводного объекта, гидрологии, шумов подводного объекта и морской поверхности. При этом в отличие от навигации с использованием донной навигационной базы навигация с помощью дрейфующих зондов, которая не требует калибровок, существенно расширяет функциональные возможности подводного объекта, дает возможность оперативно оборудовать рабочий полигон любой площади и протяженности необходимым количеством зондов, позволяет подводному объекту определять свои координаты в реальном времени, оперативно менять свои тактические задачи без потери навигационной информации, получать данные по своим координатам в любое необходимое время или постоянно в автоматическом режиме.
При навигации подводного объекта при ее работе на глубинах более одного километра целесообразно работать на частотах в диапазоне от 8 до 15 кГц, при этом энергетическая дальность связи зондом будет достигать 10-14 км, а погрешность определения координат аппарата составит 7-10 метров в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 град. по углу пеленгации. При рабочей глубине менее одного километра, целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км.
Алгоритм работы навигационной системы с применением зондов имеет гибкую структуру и может быть легко адаптирован как под заранее прокладываемый маршрут подводного объекта на полигоне, так и под определение координат подводного объекта в любое конкретное время ее работы на полигоне в различных гидрологических условиях, условиях шума, в том числе с соблюдением условия защиты от обнаружения. Дополнительные возможности по обеспечению оперативной навигации подводного объекта дает установка (запуск) зонда непосредственно с подводного объекта в необходимый момент времени.
После подъема зонда на поверхность он переходит в режим приема спутниковых сигналов системы GPS и передачи гидроакустических сигналов на подводный объект в режиме «запрос-ответ» или режиме «пингер». Подводный объект фиксирует дистанцию и пеленг до маяка-дрифтера (режим УКБ) и вычисляет свои точные географические координаты, используя информацию, принятую от зонда по гидроакустическому каналу связи. Скорость передачи по гидроакустическому каналу связи может составлять 9600-12400 бод. Наиболее оптимальная дальность связи в режиме УКБ, при глубине подводного объекта до 500 метров - 1 км. Точность определения координат до 5 метров. Наличие гидроакустического канала связи между зондом и подводным объектом позволяет так же обеспечивать передачу служебной информации из наземного Центра на подводный объект по спутниковому телеметрическому связному каналу через зонд, находящийся в зоне гидроакустической связи с подводным объектом.
При этом может быть реализована комбинированная система гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать пеленгационную систему решения задачи выхода подводного объекта в точку установки зонда. При этом гидроакустическая антенна подводного объекта представляет две имеющие общий центр базы из приемников. При этом если две приемные базы расположены в плоскости, параллельной плоскости палубы, и ортогональны, ось одной базы направлена вдоль осевой линии подводного объекта, а ось другой базы направлена по траверзу вправо.
Две имеющие общий центр базы из приемников позволяют определить направление на источник сигнала как линию пересечения двух конических поверхностей с совпадающими вершинами. Сдвиг фаз Δφ1 электрических сигналов двух точечных приемников (первого второго), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода сигнала соотношением
Δφ1=kcosα, где α - угол прихода сигнала, k - коэффициент, равный k=2πf0 b/с, где b - длина базовой линии, f0 - несущая частота, с - скорость звука в точке приема сигнала. Таким образом α=arc cos (λφ1/k). Сдвиг фаз Δφ2 электрических сигналов двух точечных приемников (третьего и четвертого), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода соотношением Δφ2=kcosβ, β=arc cos Δφ2/k. Введя вспомогательные углы φ и ψ (фиг.2), получим, что при известной глубине Н подводного объекта выражения для координат подводного объекта Х0, Y0 относительно центра базы. При этом плоскость с ординатой Н является третьей поверхностью положения. Очевидно, что
cosψ=D/R, где D - дистанция, R - наклонная дальность, cosψ=x/D,
cosα=x/R(cosΨcosφ)=(Dx)/(RD)=x/R, cosβ=y/R(cosΨcosφ)=(Dy)/(RD)=yR
При этом cosα=cosΨcosφ, cosβ=cosΨsinφ, Х0=H cosφ/tgΨ, Y0=H sin φ/tgΨ. Откуда получаем x0=сНΔφ1/а; у0=сНΔφ2/b.
Так как плоскость палубы практически никогда не совпадает с плоскостью горизонта, то учитываются также влияние углов крена η и дифферента γ. Дифферент не сказывается на значении у0, а крен на значении х0, ось Х направлена вдоль продольной оси подводного объекта, а ось Y направлена по траверзу. Исправленные путем учета крена и дифферента значения координат маяка можно записать следующим образом: x1=H tg[arc tg([0/H)+γ],  где γ и
где γ и  - положительные значения при опускания носа и правого борта.
- положительные значения при опускания носа и правого борта.
Информация о координатах зонда относительно подводного объекта позволяет решить задачу выхода подводного объекта в реперную точку, так как она легко преобразуется в значения курсового угла КУ и дистанции D: КУ=arc tg(y,x),
D=(x2+у2)1/2. Решение обратной задачи дает возможность определить координаты подводного объекта на карте или планшете, на который предварительно наносится реперная точка. В том случае, когда определяется также наклонное расстояние до зонда, третьей поверхностью положения является сфера с радиусом, равным наклонному расстоянию. Формулы для вычисления координат упрощаются и имеют вид х0=(cRΔφ12)/α, у0=(cRΔφ32)/β.
Составные части подводного объекта включают приемную гидроакустическую антенну, состоящую из четырех гидрофонов. Секция антенны состоит из двух одноканальных и одного двухканального модуля, располагающихся на линейном несущем кронштейне. Расстояние между приемными гидрофонами двухканального модуля составляет 50 мм. Максимальное разнесение крайних приемников на кронштейне составляет 1000 мм. Кронштейн перфорирован, что позволяет располагать приемники в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве приемников-гидрофонов использованы пьезокерамические сферы диаметром 30 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Сферы размещаются на стальной пластине размером 145×145×10 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 ДБ.
Антенный комплекс состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны.
Каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, предназначенный для измерения проекции вектора прихода акустического сигнала на одну из горизонтальный осей в режиме ультракороткой базы, в пеленгационном режиме, либо для приема сигналов в режиме длинной базы на 4 рабочих частотах. Секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу.
Таким образом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированной дрейфующей станции в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту осуществляется режим измерения задержек от 8 дрейфующих станций в режиме длинной базы.
Система передачи информации по гидроакустическому каналу на подводном объекте реализуется с использованием штатных средств гидроакустической связи. При этом в качестве устройств формирования и обработки сигналов могут быть применены как имеющая в составе гидроакустическая аппаратура, обеспечивающая режим гидроакустической связи, так и дополнительные устройства в виде приставок, подключаемых к их передающему и приемному трактам.
В качестве сигналов местоположения использованы тональные сигналы с частотой 3 кГц, излучаемого как в автоматическом режиме по специальной программе, так и в режиме запроса.
Определив свои координаты относительно зонда и имея информацию о географических координатах последнего, подводный объект выполняет собственное координирование в географической системе координат.
Вновь введенные устройства и элементы построены на базе аналогов, имеющих промышленную применимость, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации.
1. Авторское свидетельство СССР №1372801.
2. Авторское свидетельство СССР №1354572.
3. Авторское свидетельство СССР №1413849.
4. Авторское свидетельство СССР №1354572.
5. Авторское свидетельство СССР №1419031.
6. Авторское свидетельство СССР №1419030.
7. Патент СА №1310101.
8. Патент US №5136549.
9. Патент US №5128907.
10. Патент NO №923428.
11. Патент NO №924654.
12. Патент NO №955258.
13. Патент NO №922223.
14. Патент NO №864300.
15. Патент NO №911639.
16. Патент RU №1770770.
17. В.А.Воронин, С.П.Тарасов, В.И.Тимошенко. Гидроакустические параметрические системы. Ростов-на-Дону. РостИздат, 2004, с.293-302.
18. Патент RU №2032178.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2008 |
|
RU2376653C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
Изобретение относится к области геофизических исследований, а именно к устройство зондирования гидросферы и может быть использовано в составе зондирующих стационарных, якорных, дрейфующих и донных станций. Подводный зонд содержит контейнер с информационно-измерительной, аппаратурой, состоящей из параметрической антенны, приемника звука с приемной антенной и датчика определения скорости звука, программно-управляющую аппаратуру, блок электропитания и устройство для регулирования плавучести с исполнительным механизмом, размещенным в нижней части контейнера и состоящим из двух частей, нижняя из которых включает в себя внутреннюю секцию, выполненную из гибкого материала, при этом стенки внешней секции перфорированы для сообщения с окружающей водной средой, а верхняя часть заполнена балластоотжимающей магнитной жидкостью и сообщена с нижней частью трубкой с управляемым вентилем, а механизм выполнен в виде электродвигателя. Контейнер выполнен колоколообразной формы, в верхней части которого размещено сенсорное кольцо с установленными на нем датчиками измерительной аппаратуры, в нижней части контейнер сочленен с гондолой посредством поворотного механизма, снабженного выдвижными клиньями, выполненными в форме ласточкина хвоста, со стороны одной торцевой части гондола снабжена аппарелью, соединенной с выдвижным кронштейном на котором установлены приемопередающие гидроакустические датчики, с другой торцевой стороны гондола снабжена торцевой электрической машиной с дисковыми индукторами и монолитным дисковым ротором, на валу которого установлен гребной винт, нижняя часть гондолы выполнена в виде киля, блок электропитания снабжен электрической микромашиной с постоянными магнитами на роторе, антенный комплекс, включающий датчики гидроакустических сигналов состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны, при этом каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу, дополнительно введены навигационно-управляющий модуль и измеритель глубины. Технический результат - расширение функциональных возможностей и автономность устройства. 12 ил.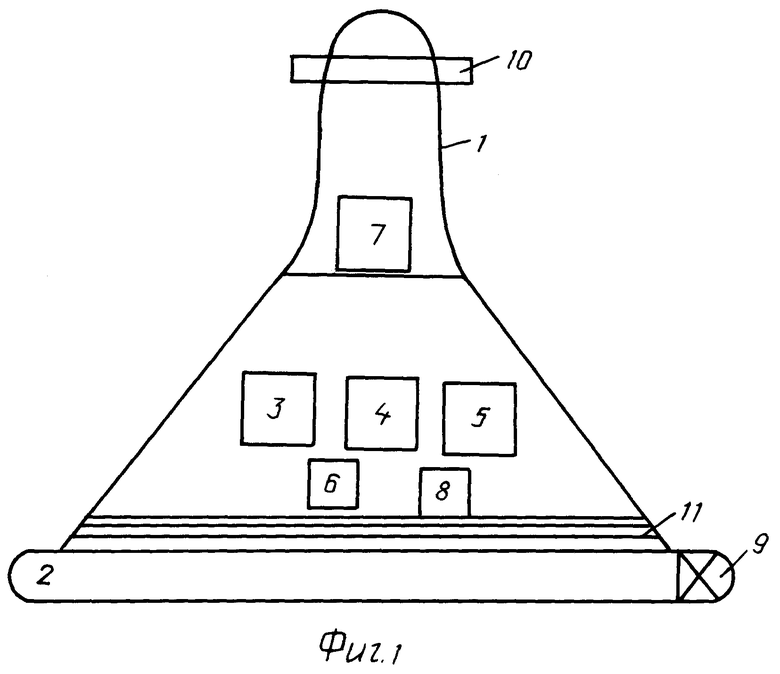
Подводный зонд, содержащий контейнер с информационно-измерительной аппаратурой, состоящей из параметрической антенны, приемника звука с приемной антенной и датчика определения скорости звука, программно-управляющей аппаратуры, блоком электропитания и устройством для регулирования плавучести с исполнительным механизмом, размещенным в нижней части контейнера и состоящим из двух частей, нижняя из которых включает в себя внутреннюю секцию, выполненную из гибкого материала, при этом стенки внешней секции перфорированы для сообщения с окружающей водной средой, а верхняя часть заполнена балластоотжимающей магнитной жидкостью и сообщена с нижней частью трубкой с управляемым вентилем, а механизм выполнен в виде электродвигателя, измерительную аппаратуру, включающую датчики гидроакустических сигналов, параметрическую антенну, приемник звука с приемной антенной, датчик скорости звука, отличающийся тем, что контейнер выполнен колоколообразной формы, в верхней части которого размещено сенсорное кольцо с установленными на нем датчиками измерительной аппаратуры, в нижней части контейнер сочленен с гондолой посредством поворотного механизма, снабженного выдвижными клиньями, выполненными в форме ласточкина хвоста, со стороны одной торцевой части гондола снабжена аппарелью, соединенной с выдвижным кронштейном, на котором установлены приемопередающие гидроакустические датчики, с другой торцевой стороны гондола снабжена торцевой электрической машиной с дисковыми индукторами и монолитным дисковым ротором, на валу которого установлен гребной винт, нижняя часть гондолы выполнена в виде киля, блок электропитания снабжен электрической микромашиной с постоянными магнитами на роторе, антенный комплекс, включающий датчики гидроакустических сигналов состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны, при этом каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу, дополнительно введены навигационно-управляющий модуль и измеритель глубины.
| Воронин В.А | |||
| и др | |||
| Гидроакустические параметрические системы | |||
| - Ростов-на-Дону.: РостИздат, 2004, с.293-302 | |||
| Акустический зонд для измерения скорости звука в море | 1990 |
|
SU1770770A1 |
| Зонд для подводных измерений | 1975 |
|
SU533820A1 |
| US 5136549 A, 04.08.1992. | |||

