Изобретение относится к области геофизических исследований скважин и предназначено для определения в процессе измерения удельного электрического сопротивления (УЭС) пластов горных пород, окружающих обсаженную металлической колонной скважину.
Известен способ электрического каротажа обсаженных скважин на основе двухполюсного симметричного зонда с пятью узлами электродов и созданное на основе этого способа устройство электрического каротажа обсаженных скважин [1].
Оно состоит из наземной и скважинной части. Наземная часть состоит из бортового компьютера, источника питания зонда, интерфейсного блока телеметрии (ТИС), обратного токового электрода В и удаленного электрода Nуд, связанных между собой линиями связи. Наземная часть через многожильный каротажный кабель связана со скважинной частью, которая состоит из скважинного прибора с гибким многоэлектродным измерительным зондом, где расположены электронные блоки, механические блоки и электроды, три из которых - эквидистантные измерительные M1, N1, M2 и два - верхний и нижний токовые A1 и A2, симметрично расположенные за пределами измерительных электродов. Все электроды расположены последовательно вдоль оси скважины, каждый электрод включает в себя два электроввода, соединенных в одну цепь и расположенных в плоскости, перпендикулярной оси скважины. В зондовой части находятся также электрогидропривод, переключатель тока питания зонда, измеритель тока питания зонда, измерители потенциалов и их разностей и контроллер с модемом телеметрии ТИС для связи с наземным бортовым компьютером. Для обеспечения процесса измерения все эти элементы связаны между собой электрическими и механическими связями.
Исследование этим устройством проводят по точкам в заданном интервале скважины, для этого скважинный прибор сначала опускают на нужную глубину, затем электрогидроприводом прибора узлы электродов поджимаются к поверхности обсадной колонны до достижения контакта, проводят циклы измерений необходимых параметров, их оцифровку и фильтрацию, а потом по соответствующим математическим формулам определяют УЭС в одной точке глубины скважины, после чего узлы электродов приводят в транспортировочное положение. Прибор перемещают на следующую точку глубины, электровводы опять поджимают к поверхности колонны для проведения исследования и определения УЭС на следующей точке глубины. При выполнении операции выдвижения электровводов их прижатие к стенке скважины осуществляется с помощью периодического механического воздействия на них гидравлическим приводом, путем последовательной многократной подачи и сброса увеличивающегося импульсного давления. Эффективность обеспечения электрического контакта с колонной низкая. Время, за которое происходит "накачка" (прижатие электродов к стенке), составляет 20-30 секунд, время "отпускания" (складывания электродов) составляет 1-5 секунд. Таким образом, время периода воздействия электродов на стенку составит 21-35 секунд, что существенно увеличивает время подготовки к проведению измерений. Это очень плавное воздействие на электровводы, которое передается через упругую среду (весь объем рабочей жидкости гидропривода, находящейся под рабочим давлением). Импульсы давления жидкости, генерируемые гидроэлектроприводом, не могут оказывать существенного влияния на процесс обеспечения контакта, поскольку амплитуда давления импульса не может быть высокой по причине малого соотношения объема впрыскиваемой жидкости ко всему объему рабочей жидкости гидропривода, находящемуся под рабочим давлением. Эти импульсы успешно гасятся не только этим объемом, но еще и гофрами с низким модулем упругости, которые имеются в приводе. При этом энергия импульса распределяется, согласно закону Паскаля, на все имеющиеся электроды одновременно. Можно сказать, что в данном устройстве обеспечение контакта электровводов с колонной происходит под воздействием статической нагрузки, чем затрудняется прорезание твердых отложений на стенке колонны до основного металла, теряется время на повторные попытки обеспечения контактов, что увеличивает время подготовки к измерениям. Хоть как-то оценить качество прижима электродов при этом удается только после проведения измерений, что приводит к большим погрешностям измерения УЭС и дополнительным затратам времени на дублирование измерений.
Гибкая конструкция измерительного зонда устройства не позволяет хорошо центрировать электроды и качественно позиционировать их в скважине, поэтому расстояния между электродами в измерительных базах могут, при прижатии к стенке колонны, различаться на несколько сантиметров, что неизбежно приводит к дополнительным погрешностям измерений УЭС. Нужно отметить, что устройство поставлено в условия работы с полезными сигналами в нановольтовом диапазоне, который во много раз ниже сигналов-помех, если последние не подавлять. Несовершенство реализованной в устройстве компенсационной системы измерения, состоящей из двух циклов работы, когда токи измерительного зонда подаются поочередно в электроды A1 и A2 относительно электрода B приводят к погрешностям измерений системы за счет влияния электромагнитных наводок силовой цепи электрода A2 на входные измерительные цепи, так как ток величиной 6-10 А неизбежно проходит вблизи измерительных входных цепей, образуя с ними общий контур.
Кроме того, плохо компенсируются погрешности, связанные с неоднородностью материала обсадной трубы, ее диаметра и несимметричности измерительных плеч прибора, а также погрешности измерений в интервалах каротажей, расположенных по глубине вблизи забоя скважины, где часть тока A1, проходящего по колонне в зоне измерительных электродов, на порядки меньше тока от A2.
Гибкая конструкция скважинного прибора приводит к таким недостаткам, как плохая проходимость прибора при спуске. Поскольку в устройстве отсутствуют датчики для контроля движения прибора, спуск прибора чреват аварийными ситуациями, вызванными неконтролируемыми остановками прибора на муфтовых соединениях, в зонах перфорации, деформированных участках колонны, солевых и цементных отложениях и прочих неоднородностях на стене колонны, при этом элементы конструкции прибора могут складываться в скважине, а каротажный кабель перепускаться ниже отдельных узлов прибора с последующим перехлестом и заклиниванием конструкции в скважине при подъеме, что подтверждает практика при работе с подобными приборами. Кроме того, при скручивании кабеля повреждается внешняя силовая оплетка и каротажный кабель приходит в негодность.
Также отсутствие в указанном устройстве специальных средств для точного определения границ пластов и заданных в заявке интервалов каротажа приводит зачастую к значительным ошибкам определения УЭС пластов. Для выполнения так называемой привязки по глубине необходимо иметь большое количество дополнительных точек измерения, так как погрешности по глубине, если ориентироваться на показания блока глубины каротажной лебедки, могут достигать десятков метров. Кроме того, привязка к кривым электрического каротажа, взятым из архива, зачастую очень затруднена, так как в интервале отсутствуют так называемые реперные пласты УЭС пород, и границы контактов жидких фракций за долгие промежутки времени существенно меняются. Поэтому, как правило, задачу решают с помощью дополнительных спуско-подъемных операций со специальными скважинными приборами. Все это также не исключает погрешности определения УЭС пластов и значительно увеличивает время подготовки к проведению измерений. В устройстве отсутствуют датчики для контроля движения во время спуско-подъемных операций, что чревато аварийными ситуациями, нет также датчиков контроля за работой прижимных устройств, что приводит к погрешностям измерений и потере времени на подготовку к измерениям.
В качестве прототипа изобретения выбрано устройство электрического каротажа обсаженных скважин [2], созданное на основе способа электрического каротажа обсаженных скважин [3].
Устройство, описанное в этих источниках, состоит из наземной и скважинной части. Наземная часть включает электронный блок, в котором находится бортовой компьютер, интерфейсный блок, источник питания зонда, а также электроды Nуд и В, связанные между собой линиями связи. Скважинная часть состоит из скважинного прибора с пятиэлектродным зондом жесткой конструкции, где расположены три измерительных электрода, последовательно и равноудаленно расположенных вдоль оси скважины и два токовых электрода, установленных за их пределами симметрично относительно среднего измерительного электрода. В скважинной части также находятся: электропривод, переключатель тока питания зонда, измеритель тока питания зонда, измерители потенциалов электродов и их разностей и контроллер с модемом телесистемы для связи с наземным бортовым компьютером через каротажный кабель.
Электроды зонда в реализации представляют собой центрирующие прибор узлы, в которых в плоскости, перпендикулярной оси скважины, находятся три заостренных электроввода, находящихся на концах подвижных механических элементов, выполняющих одновременно роль центратора, обеспечивающих их перемещение и поджим к внутренней стенке колонны. Все электровводы в узле объединены в одну цепь, что необходимо для обеспечения резервирования на случай попадания в зоны с нарушениями поверхности колонны.
Исследование этим устройством также проводят по точкам, в заданном интервале скважины, для этого скважинный прибор сначала опускают на нужную глубину, затем приводом прибора узлы электродов поджимаются к поверхности обсадной колонны до достижения контакта, проводят циклы измерений необходимых параметров, их оцифровку и фильтрацию, а затем по соответствующим математическим формулам определяют УЭС в одной точке глубины скважины, после чего узлы электродов приводят в транспортировочное положение. Прибор перемещают на следующую точку глубины (как правило, не более 0,5 метров), электровводы опять поджимают к поверхности колонны для проведения измерения УЭС на следующей точке глубины. Оценить качество прижима электродов при этом удается только после проведения измерений, что приводит к погрешностям измерения УЭС, частым ошибкам и дополнительным затратам времени на дублирование измерений.
К недостаткам, присущим этому устройству, в полной мере относятся недостатки, описанные для аналога, за исключением недостатков, обусловленных гибкой конструкцией измерительного зонда. Жесткая конструкция измерительного зонда обеспечивает лучшее позиционирование измерительных электродов зонда в скважине и соответственно снижаются погрешности измерения, связанные с этим. Кроме того, использование в этом устройстве для питания зонда прямоугольных импульсов, что сосредотачивает электромагнитные помехи в основном на фронтах импульсов, (при этом измерения проводятся с задержкой относительных фронтов) и применение более совершенной измерительной схемы снижает влияние электромагнитных наводок на результаты измерения УЭС. Однако погрешности в зонах слабых сигналов при высоких значениях УЭС пластов остаются значительными. Таким образом, для указанного прототипа присущи следующие недостатки:
несовершенность системы присоединения электродов к колонне с отсутствием контроля за качеством прижима, что приводит к погрешностям измерения УЭС пластов и дополнительным затратам времени на подготовку к измерениям;
плохая компенсация погрешностей, связанных с электромагнитными наводками, неоднородностью материала обсадной трубы, ее диаметра и несимметричности измерительных плеч зонда, а также погрешностей, связанных с расположением интервалов измерений по глубине вблизи забоя скважины, что обусловлено близкими к нулю значениями так называемого коэффициента фокусировки из-за того, что питающие токи от электродов A1 и A2, протекающие по колонне в зоне измерительных электродов, разнятся на порядки (на практике же проведение каротажей вблизи забоя скважины встречается довольно часто);
значительная погрешность определения УЭС пластов за счет отсутствия в устройстве специальных средств для точного определения границ пластов и заданных интервалов каротажа, что также приводит к существенным затратам времени на подготовку к измерениям;
высокая аварийность при проведении каротажей, так как в устройстве отсутствуют датчики контроля за движением скважинного прибора;
за период проведения каротажа расходуется много времени на подготовку к измерениям, еще и потому что за одну операцию прижима регистрируется максимум одно значение УЭС пласта.
В предложенном устройстве решается задача повышения точности определения УЭС пластов в обсаженных металлическими колоннами скважинах, за счет учета влияния диаметра обсадной колонны, положения измерительного интервала относительно забоя и устья скважины, более эффективной компенсации влияния разбалансировки положений измерительных электродов и непостоянства погонного сопротивления обсадной колонны, более точного определения границ пластов и обеспечения более качественного контакта электровводов со стенками колонны, а также компенсации наводок за счет прохождения питающего тока A2 в зоне измерительных цепей. Кроме того, дополнительно решаются задачи снижения аварийности при проведении каротажа и времени подготовки к проведению измерений, что существенно снижает время выполнения каротажа.
Технический результат достигается тем, что в устройстве для каротажа скважин, обсаженных металлическими колоннами, содержащем скважинный прибор с многоэлектродным измерительным зондом, состоящий из корпуса, механических блоков, электронного блока, группы узлов электродов из пяти или более, установленных последовательно друг за другом вдоль оси прибора, каждый узел включает в себя не менее двух электровводов, расположенных в плоскости, перпендикулярной оси скважины, где в крайних двух узлах группы находятся токовые электровводы A1, A2, остальные электровводы в группе являются измерительными и находятся на одинаковом расстоянии L друг от друга, все электровводы многоэлектродного зонда имеют возможность прижиматься к стенке металлической колонны скважины, создавая с ней электрический контакт с помощью электропривода и прижимных механизмов, электронный блок, включающий в себя контроллер, который связан по специальным линиям связи с переключателем тока питания зонда, измерителями потенциалов электродов и их разностей, электроприводом, и через модем и каротажный кабель по телеметрической линии связи с бортовым компьютером, а также наземную часть, состоящую из бортового компьютера, интерфейсного блока, источника питания зонда и электродов Nуд и В, соединенных между собой линиями связи, каротажной лебедки, блока глубины и многожильного каротажного кабеля, соединяющего скважинный прибор с наземной частью, наземная часть оснащена блоком коммутации, обеспечивающим возможность подачи тока источника питания зонда через каротажный кабель между токовыми электродами A1 и A2, наряду с возможностью запитывания токовых электродов относительно электрода B, кроме того, электронный блок скважинного прибора оснащен акселерометром, блоком гамма каротажа (ГК) и локатором муфт, связанными через контроллер и модем по телеметрической линии связи с бортовым компьютером наземной части, а прижимные механизмы дополнены ударными механизмами, обеспечивающими внедрение острозаточенных электровводов в тело колонны, бортовой компьютер дополнительно снабжен специальным модулем программ расчета значений удельного электрического сопротивления пород применительно к любым трем рядом расположенным измерительным электродам по трем измерительным циклам с 3-мя разными вариантами запитывания токовых электродов, для чего:
из данных, полученных при подаче тока между токовыми электродами A1 и A2, используется проходящий через них ток I(1,2), разность потенциалов между крайними измерительными электродами ΔU(1,2) и разность потенциалов либо между средним и верхним измерительным электродом ΔU(1,2)up, либо между средним и нижним измерительным электродом ΔU(1,2)down, по которым определяется вторая разность потенциалов Δ2U(1,2) по формуле Δ2U(1,2)=ΔU(1,2)-2ΔU(1,2)up или Δ2U(1,2)=2ΔU(1,2)down-ΔU(1,2) соответственно;
из данных, полученных при подаче тока I(1,0) между заземлением (электрод B) и верхним токовым электродом A1, используется потенциал одного из измерительных электродов U(1,0), разность потенциалов между крайними измерительными электродами ΔU(1,0) и разность потенциалов либо между средним и верхним измерительными электродами ΔU(1,0)up, либо между нижним и средним измерительными электродами ΔU(1,0)down, по которым вычисляется вторая разность потенциалов Δ2U(1,0) по формуле Δ2U(1,0)=ΔU(1,0)-2ΔU(1,0)up или Δ2U(1,0)=2ΔU(1,0)down-ΔU(1,0) соответственно;
из данных, полученных при подаче тока I(2,0) между заземлением (электрод B) и нижним токовым электродом A2, используется потенциал одного из измерительных электродов U(2,0), разность потенциалов между крайними измерительными электродами ΔU(2,0) и разность потенциалов либо между средним и верхним измерительными электродами ΔU(2,0)up, либо между нижним и средним измерительными электродами ΔU(2,0)down, по которым вычисляется вторая разность потенциалов Δ2U(2,0) по формуле Δ2U(2,0)=ΔU(2,0)-2ΔU(2,0)up или Δ2U(2)=2ΔU(2)down-ΔU(2) соответственно; удельное сопротивление (УЭС) горных пород вычисляется по формуле

где 
K0(0.004·R) - функция Макдональда нулевого порядка, в аргумент которой входит радиус обсадки R, причем устройство имеет возможность определения трех и более значений УЭС на одной точке измерения (прижима электродов) в зависимости от количества используемых измерительных электродов.
Изобретение поясняется чертежом на фиг.1, где представлена блок-схема предложенного устройства, Фиг.2 поясняет взаимное расположение узлов и блоков.
По тексту в обращениях к фиг.1 название чертежа (фиг.1) не приводится, а обращения к позиции фиг.2 приводятся полностью.
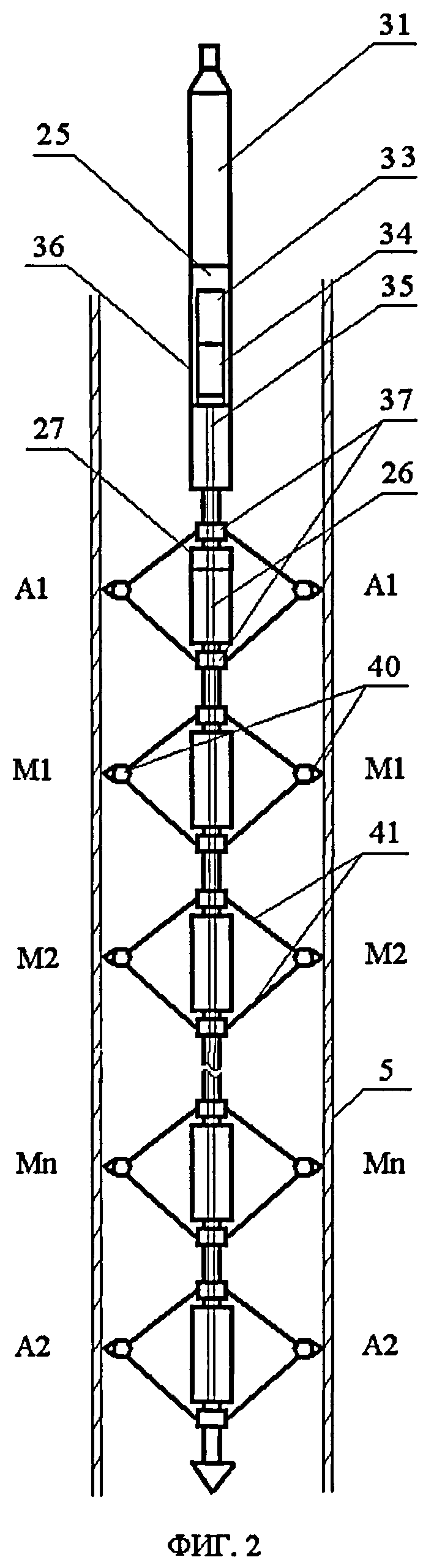
Устройство для электрического каротажа через металлическую колонну содержит скважинный прибор с многоэлектродным зондом 15, где в корпусе прибора 36, фиг.2, размещены измерительные электроды M1, M2, M3, … Mn соответствующие позициям 9, 10, 11…12, и токовые электровводы A1, А2, соответствующие позициям 8,13. В корпусе электронного блока 31, фиг.2, размещены: переключатель тока питания зонда 6, цифровой измеритель электрического потенциала 7 относительно удаленного электрода 3 - Nуд, цифровой измеритель разностей электрических потенциалов электродов 17, модем 30 для телеметрической линии связи с наземной частью через каротажный кабель 24, цифровой измеритель тока зонда 28 с шунтом 29, контроллер 20, имеющий линии связи со всеми электронными устройствами и блоками, служащий для управления, а также сбора и передачи информационных сигналов, блок ГК (гамма-каротажа) 46 для регистрации естественной радиоактивности пород, локатор муфт 45 для регистрации муфтовых соединений обсадной колонны и акселерометр 47, позволяющий регистрировать вертикальные и горизонтальные составляющие ускорения при движении прибора и работе ударных механизмов. Указанные устройства широко распространены в практике геофизических исследований и часто используются, как отдельные скважинные приборы. В корпусе электронного блока 31, фиг.2, также установлен электропривод 25, фиг.2, включающий электродвигатель 33, фиг.2, редуктор 34, фиг.2, с выходным валом привода 35, фиг.2, посредством которого управляются прижимные механизмы электровводов 26 и ударные механизмы 27. Прижимной механизм 26, фиг.2, и ударный механизм 27, фиг.2, установлены в корпусе прибора 36, фиг.2, в каждом из узлов электродов 37, фиг.2. Все узлы электродов имеют идентичную конструкцию и установлены в подпружиненных рычажных конструкциях 41, фиг.2, заканчивающихся заостренными твердосплавными электровводами 40, фиг.2, раскрываемых и складываемых с помощью вала 35, фиг.2.
Ударный механизм 27, фиг.2, представляет собой распространенный механизм по типу, используемому в бытовых перфораторах и дрелях для сверления бетонных стен, где вращательное движение вала с помощью подпружиненных кулачков преобразуется в ударное движение молотка. В нашем случае с помощью этого механизма вращательное движение вала 35, фиг.2, преобразуется в ударное движение подпружиненного молотка, которое передается через рычаги 41, фиг.2, на острозаточенные электровводы 40, фиг.2, и способствует их врезанию в тело металлической обсадной колонны 5. На дневной поверхности 4 находится бортовой компьютер 21, интерфейсный блок 23 для связи по телеметрической линии связи со скважинным прибором 15, источник питания зонда трапецеидальными двуполярными импульсами 1, каротажная лебедка 43, блок глубины 42 и блок коммутации 44, а также электроды В-2 и Nуд-3, соединенные необходимыми линиями связи.
Многоэлектродный зонд выполнен в виде группы последовательно расположенных вдоль оси скважины пяти и более узлов электродов, каждый узел электровводов 37, фиг.2, включает в себя два и более электроввода 40, фиг.2, расположенных в плоскости, перпендикулярной оси скважины. В крайних узлах группы электродов находятся токовые электровводы A1 и A2, фиг.2, все электровводы имеют возможность подключаться к обсадной колонне 5, фиг.2.
Работа устройства
Режим измерения поточечный. Скважинный прибор 15 с помощью каротажной лебедки 43 опускается на заданную глубину в интервале исследований. При этом производится запись кривой естественной радиоактивности горных пород с помощью блока ГК 46 и кривой локатора муфт 45, а с помощью акселерометра 47 отслеживается характер движения прибора для исключения аварийной ситуации, связанной с остановкой прибора и перепуском каротажного кабеля. Интервал записи ГК берут с учетом попадания в него характерных легко выделяемых участков и всех необходимых интервалов для исследований. Далее с помощью бортового компьютера эти кривые совмещают с архивными кривыми ГК и локатора муфт, которые входят в обязательный комплекс каротажа при сдаче скважины в эксплуатацию и таким образом корректируют с высокой точностью показания блока глубины каротажной лебедки, что в дальнейшем гарантирует высокую точность определения по УЭС газо-водо-нефтяных контактов и характера насыщенности коллекторов. Практика показывает, что использование отдельных приборов с этой целью не дает высокой точности, так как появляются погрешности, связанные с несовершенством технологии каротажа, устройств и человеческого фактора. Под действием разного веса по разному растягивается кабель, не точно определяется точка записи, налипание грязи на кабель при разных спуско-подъемах по разному влияет на показания счетчика лебедки, с большой погрешностью выставляется начальная глубина и прочее. Поэтому оптимальные измерения получаются, когда все три метода находятся в одном приборе. Все измерения производятся при одном спуско-подъеме и дополняют друг друга.
Далее все электровводы с помощью электропривода 25, фиг,2, посредством выходного вала 35, фиг.2, и прижимного механизма 26, фиг.2, прижимаются к обсадной колонне 5, фиг.2. С помощью ударного механизма 27, фиг.2, производят на них периодическое ударное воздействие для обеспечения внедрения заостренных наконечников электровводов 40, фиг.2, в тело металлической обсадной колонны 5, фиг.2, одновременно включают с помощью наземного бортового компьютера 21, через интерфейсный блок 23, модем 30 и контроллер 20 акселерометр 47. По характеру и амплитуде сигнала акселерометра делается заключение о качестве внедрения электровводов в тело колонны, гарантированное внедрение обеспечивается пятью периодами воздействия, при этом пробиваются отложения и корродированный слой на стенке колонны. Достигаемое минимальное сопротивление контакта гарантирует высокую точность измерений. Информационный сигнал акселерометра 47 с помощью контроллера 20 через модем 30 по каротажному кабелю 24 и интерфейсный блок 23 передается в наземный бортовой компьютер. По достижении гарантирующих внедрение пяти циклов воздействия ударная операция на электровводы прекращается, и начинается цикл измерений на точке. В токовые электровводы A1 и A2, позиции 8 и 13 поочередно, в трех циклах, с помощью источника питания 1, переключателя тока питания зонда 6, блока коммутации 44 и электрода B, 2 подают двуполярные трапецеидальные импульсы электрического тока, и при каждой из подач тока измеряют, используя шунт 23 и АЦП 28, поданный ток, потенциал одного из измерительных электродов, используя цифровой измеритель потенциала 7 и электрод Nуд 3, а также первые и вторые разности в трех и более точках по глубине скважины с помощью цифрового измерителя потенциалов электродов. Все оцифрованные сигналы соответствующим образом обрабатывают, фильтруют и на их основе, с использованием оригинального модуля программ расчета УЭС в бортовом компьютере, по предложенным формулам, с учетом возникающих при измерении мешающих факторов, обусловленных влиянием изменения диаметра колонны, изменения ее погонного сопротивления, разбалансировкой положений электровводов, положением измерительного интервала относительно забоя и устья скважины, а также наводками силовой цепи электрода А2 в зоне измерительных цепей, одновременно по трем и более точкам глубины определяют УЭС горных пород. Затем электроприводом 25 электровводы складывают в транспортировочное положение и скважинный прибор перемещают лебедкой 43 на следующие точки интервала исследований, контролируя перемещение с помощью акселерометра 47, исключая тем самым аварийную ситуацию при случайном прихвате прибора.
Макет устройства проверен в скважинных условиях. Анализ полученных материалов показывает повышение точности измерений, значительное сокращение времени на подготовку измерений и увеличение скорости каротажа в целом, работа устройства показала снижение аварийности при проведении каротажей, надежность, технологичность, удобство в обслуживании. Завершается выпуск партии приборов для каротажа скважин, обсаженных металлическими колоннами, соответствующих данному устройству.
Литература
1. Кривоносов Р.Н., Кашик А.С. Способ и устройство электрического каротажа обсаженных скважин №2306582 от 21.11.2005 г., опубл. 11.08.2007 г.
2. Рыхлинский Н.И., Бродский П.А. и др. Патент №3661245 от 19.02.2008 г.
3. Рыхлинский Н.И., Бродский П.А. и др. Способ электрического каротажа обсаженных скважин. Патент №2382385 от 26.01.2009 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для каротажа скважин, обсаженных металлической колонной | 2011 |
|
RU2630991C1 |
| Способ каротажа скважин, обсаженных металлической колонной | 2011 |
|
RU2630335C2 |
| СПОСОБ КАРОТАЖА СКВАЖИН, ОБСАЖЕННЫХ МЕТАЛЛИЧЕСКОЙ КОЛОННОЙ | 2011 |
|
RU2490673C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ЧЕРЕЗ МЕТАЛЛИЧЕСКУЮ КОЛОННУ | 2011 |
|
RU2508561C2 |
| Устройство для электрического каротажа через металлическую колонну | 2011 |
|
RU2631099C2 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2005 |
|
RU2536732C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2009 |
|
RU2382385C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2008 |
|
RU2361246C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2005 |
|
RU2306582C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2009 |
|
RU2408039C1 |
Изобретение относится к области геофизических исследований обсаженных скважин. Технический результат: повышение точности определения удельного электрического сопротивления пластов. Сущность: устройство включает наземную часть и скважинный прибор с многоэлектродным зондом. Наземная часть состоит из бортового компьютера, блока коммутации, интерфейсного блока, каротажной лебедки, блока глубины и источника питания зонда, а также электродов B и Nуд. Зонд выполнен в виде группы из пяти и более узлов электродов, последовательно расположенных вдоль оси скважины. В крайних узлах группы электродов находятся токовые электроды A1 и A2. Остальные узлы электродов в группе являются измерительными (M1…Mn). Электровводы зонда имеют возможность поджиматься к стенке колонны с помощью электропривода с прижимными механизмами и с помощью встроенных ударных механизмов внедряться в тело колонны. Электронный блок скважинного прибора включает блок гамма-каротажа, локатор муфт и акселерометр. С помощью акселерометра контролируют качество работы ударных механизмов. Блок коммутации обеспечивает возможность подачи тока между токовыми электродами A1 и A2 и запитывания электродов A1 и A2 относительно электрода В при трех циклах измерений. На основе оцифрованных результатов измерений трех циклов определяется удельное электрическое сопротивление по формуле, учитывающей, в том числе, диаметр обсадной колонны. 2 ил.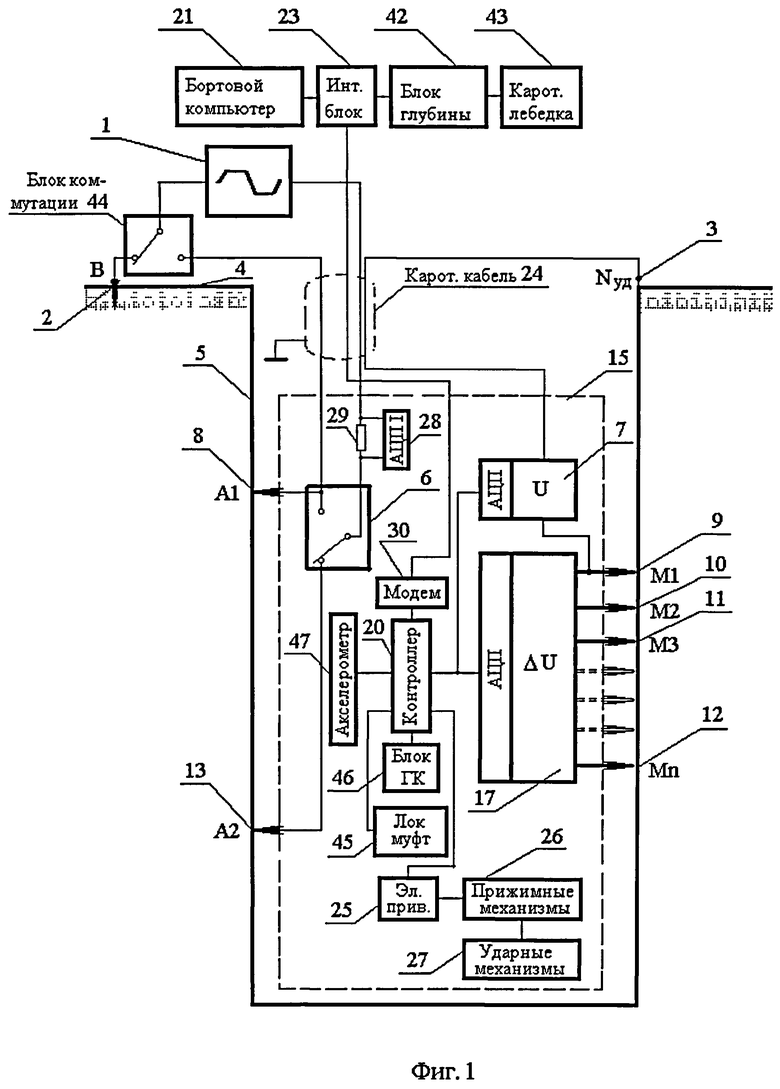
Устройство для каротажа скважин, обсаженных металлической колонной, содержащее скважинный прибор с многоэлектродным измерительным зондом, состоящий из корпуса, механических блоков, электронного блока, группы узлов электродов из пяти или более, установленных последовательно друг за другом вдоль оси прибора, каждый узел включает в себя не менее двух электровводов, расположенных в плоскости, перпендикулярной оси скважины, причем в крайних двух узлах группы расположены токовые электроды A1, A2, остальные электроды в группе являются только измерительными и находятся на одинаковом расстоянии L друг от друга, все электроды многоэлектродного зонда имеют возможность прижиматься к стенке металлической колонны скважины, создавая с ней электрический контакт с помощью электропривода и прижимных механизмов, электронный блок, включающий в себя контроллер, который связан по специальным линиям связи с переключателем тока питания зонда, измерителями потенциалов электродов и их разностей, электроприводом, через модем и каротажный кабель по телеметрической линии связи с бортовым компьютером, и наземную часть, состоящую из бортового компьютера, интерфейсного блока, источника питания зонда, а также электродов Nуд и B, соединенных между собой линиями связи, каротажной лебедки, блока глубины и многожильного каротажного кабеля, соединяющего скважинный прибор, отличающееся тем, что наземная часть дополнительно оснащена блоком коммутации, обеспечивающим возможность подачи тока источника питания зонда через каротажный кабель между токовыми электродами A1 и A2, наряду с возможностью запитывания токовых электродов относительно электрода B, кроме того, электронный блок скважинного прибора оснащен акселерометром, блоком гамма каротажа (ГК) и локатором муфт, связанными через контроллер и модем по телеметрической линии связи с бортовым компьютером наземной части, а прижимные механизмы дополнены ударными механизмами, обеспечивающими внедрение острозаточенных электровводов в тело колонны, бортовой компьютер дополнительно снабжен специальным модулем программ расчета значений удельного электрического сопротивления пород применительно к любым трем рядом расположенным измерительным электродам по трем измерительным циклам с тремя разными вариантами запитывания токовых электродов, для чего:
из данных, полученных при подаче тока между токовыми электродами A1 и A2, используется проходящий через них ток I(1,2), разность потенциалов между крайними измерительными электродами ΔU(1,2) и разность потенциалов либо между средним и верхним измерительными электродами ΔU(1,2)up либо между средним и нижним измерительными электродами ΔU(1,2)down, по которым определяется вторая разность потенциалов Δ2U(1,2) по формуле Δ2U(1,2)=ΔU(1,2)-2ΔU(1,2)up или Δ2U(1,2)=2ΔU(1,2)down-ΔU(1,2) соответственно;
из данных, полученных при подаче тока I(1,0) между заземлением (электрод В) и верхним токовым электродом А1, используется потенциал одного из измерительных электродов U(1,0), разность потенциалов между крайними измерительными электродами ΔU(1,0) и разность потенциалов либо между средним и верхним измерительными электродами ΔU(1,0)up либо между нижним и средним измерительными электродами ΔU(1,0)down, по которым вычисляется вторая разность потенциалов Δ2U(1,0) по формуле Δ2U(1,0)=ΔU(1,0)-2ΔU(0,1)up или Δ2U(1,0)=2ΔU(1,0)down-ΔU(1,0) соответственно;
из данных, полученных при подаче тока I(2,0) между заземлением (электрод В) и нижним токовым электродом А2, используется потенциал одного из измерительных электродов U(2,0), разность потенциалов между крайними измерительными электродами ΔU(2,0) и разность потенциалов либо между средним и верхним измерительными электродами ΔU(2,0)up, либо между нижним и средним измерительными электродами ΔU(2,0)down, по которым вычисляется вторая разность потенциалов Δ2U(2,0) по формуле Δ2U(2,0)=ΔU(2,0)-2ΔU(2,0)up или Δ2U(2)=2ΔU(2)down-ΔU(2) соответственно;
удельное сопротивление (УЭС) горных пород вычисляется по формуле

где 
K0(0.004·R) - функция Макдональда нулевого порядка, в аргумент которой входит радиус обсадки R, причем устройство имеет возможность определения трех и более значений УЭС на одной точке измерения (прижима электродов).
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2009 |
|
RU2382385C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2005 |
|
RU2306582C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОХИМИЧЕСКИХ СВОЙСТВ ФОРМАЦИЙ, ПРИЛЕГАЮЩИХ К СКВАЖИНЕ | 1991 |
|
RU2065957C1 |
| УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2008 |
|
RU2361245C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2006 |
|
RU2302019C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2000 |
|
RU2172006C1 |
| US 5543715 A, 06.08.1996 | |||
| US 5043669 A, 27.08.1991 | |||
| WO 2003054585 A1, 03.07.2003 | |||
| US 6987386 B1, 17.01.2006 | |||
| US 7388382 B2, 17.06.2008. | |||

