Изобретения относятся к области радиосвязи и радиолокации и могут быть использованы для амплитудной, фазовой и амплитудно-фазовой модуляции или манипуляции высокочастотных сигналов.
Известен способ манипуляции (модуляции) параметров отраженного сигнала, состоящий в том, что входное сопротивление устройства манипуляции изменяют таким образом, что коэффициент отражения этого устройства изменяет фазу на π, π/2, π/4, причем для разделения входного и отраженного сигнала используют циркулятор [Радиопередающие устройства. / Под редакцией О.А. Челнокова - М.: Радио и связь, 1982, стр.152-156]. Известно устройство реализации этого способа [там же], состоящее из циркулятора, первый вход которого подключен к источнику сигнала, третий вход подключен к нагрузке, а второй подключен к отрезку разомкнутой линии передачи длиной λ/4 вначале которой включен p-i-n диод.
Если диод закрыт, то от сечения, в котором он включен, происходит отражение, отраженная волна попадает в нагрузку с сопротивлением 50 Ом. Если диод открыт, то отражение происходит от конца линии. Фаза отраженного сигнала в одном состоянии диода отличается от фазы отраженного сигнала в другом состоянии диода на π. При необходимости изменения разности фаз длина отрезка линии передачи изменяется соответствующим образом.
Недостатком этого способа и устройства его реализации является то, что в двух состояниях диода изменяется только фаза отраженного сигнала, причем заданные значения разности фаз отраженного сигнала в двух состояниях диода обеспечивается только на одной фиксированной частоте. Другим недостатком является постоянство амплитуды отраженного сигнала в двух состояниях диода, то есть отсутствие манипуляции амплитуды, что сужает функциональные возможности. Например, это не позволяет обеспечить два канала радиосвязи на одной несущей частоте (один канал можно образовать с помощью манипуляции амплитуды, а другой с помощью манипуляции фазы или не позволяет обеспечить кодировку передаваемой информации). Третьим недостатком следует считать большие массы и габариты, связанные с необходимостью использования отрезков линии передачи. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию (модуляцию) амплитуды и фазы проходного сигнала. Основным недостатком является отсутствие возможности обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот.
Известен способ манипуляции фазы отраженного сигнала, основанный на использовании двухимпедансных устройств СВЧ [В.Г. Соколинский, В.Г. Шейнкман. Частотные и фазовые модуляторы и манипуляторы. - М.: Радио и связь, 1983, стр.146-158]. Известно устройство реализации этого способа [там же], состоящее из определенного количества реактивных элементов типа L, C параметры которых выбраны из условия обеспечения требуемой произвольной разности фаз коэффициента отражения.
По сравнению с предыдущим способом и устройством данный способ и устройство его реализации не требуют использования полупроводниковых диодов только в открытом и только закрытом состояниях. При любых состояниях диодов, определяемых двумя уровнями низкочастотного управляющего воздействия, при определенных значениях параметров типа L, С может быть обеспечено заданное значение разности фаз отраженного сигнала на фиксированной частоте. Если амплитуда управляющего низкочастотного сигнала между указанными двумя уровнями изменяется непрерывно, то обеспечивается модуляция.
Основным недостатком (как и в первом способе и устройстве) является отсутствие возможности одновременного обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ [Головков А.А. Устройство для модуляции отраженного сигнала. Авт. св-во №1800579 от 09.10 1992 года], состоящий в том, что неуправляемую часть (согласующе-фильтрующее устройство) формирует из определенным образом соединенных между собой двухполюсников, сопротивление каждого двухполюсника выбирают из условия обеспечения одинакового заданного двухуровневого закона изменения амплитуды и фазы отраженного сигнала при изменении управляемого элемента из одного состояния в другое под действием управляющего низкочастотного напряжения или тока.
Известно устройство (прототип) реализации способа [там же], содержащее циркулятор, первое и третье плечи которого являются СВЧ входом и выходом, а во второе плечо включены реактивный четырехполюсник и полупроводниковый диод, подключенный к источнику низкочастотного управляющего воздействия, при этом четерехполюсник выполнен в виде Т-образного соединения двухполюсников со значениями реактивных сопротивлений, которые выбраны из условия обеспечения требуемых законов двухуровневого изменения амплитуды и фазы отраженного сигнала на двух заданных частотах. Также как и в предыдущих способе и устройстве реализации возможна модуляция фазы и амплитуды, если управляющий сигнал изменяется непрерывно.
Основным недостатком (как и в предыдущих способах и устройствах) является отсутствие возможности одновременного обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот по заданному закону. Следующим важным недостатком всех перечисленных способов и устройств является то, что все элементы четырехполюсников выполнены реактивными, что связано со стремлением разработчиков не вносить дополнительных потерь путем использования резистивных элементов. Однако резистивные элементы, обладая независимостью своих параметров от частоты в довольно широкой полосе частот (от самых низких частот (единицы кГц) до частот порядка 500…800 МГц), могут обеспечить достаточно широкую полосу частот амплитудно-фазовых манипуляторов при незначительном увеличении потерь, которые могут быть учтены при соответствующем параметрическом синтезе четырехполюсников. Согласование и фильтрация с помощью резистивных четырехполюсников возможно при условии, если сопротивления источника сигнала и нагрузки являются комплексными [Головков А.А. Синтез амплитудных и фазовых манипуляторов отраженного сигнала на резистивных элементах с сосредоточенными параметрами. Радиотехника и электроника, 1992 г/, №9, с.1616-1622].
Техническим результатом изобретения является одновременное обеспечение модуляции амплитуды и фазы высокочастотного сигнала при заданных зависимостях отношения модулей и разности фаз передаточной функции модулятора в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот.
1. Указанный результат достигается тем, что в способе амплитудно-фазовой модуляции высокочастотного сигналов, состоящем в том, что высокочастотный сигнал подают на модулятор, выполненный из четырехполюсника, управляемого двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, амплитуду и фазу высокочастотного сигнала изменяют путем изменения амплитуды управляющего низкочастотного сигнала на нелинейном элементе, дополнительно четырехполюсник выполняют резистивным, нелинейный элемент включают в поперечную цепь между выходом источника высокочастотного сигнала и входом четырехполюсника, к выходу четырехполюсника подключают нагрузку, заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот обеспечивают за счет выбора частотных характеристик мнимых составляющих сопротивлений нагрузки хн источника высокочастотного сигнала x0 с помощью следующих математических выражений:



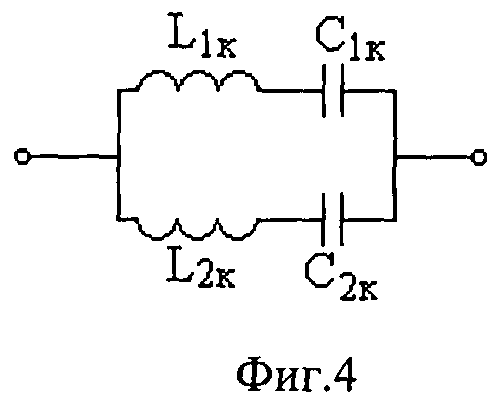
2. Указанный результат достигается тем, что в устройстве амплитудно-фазовой модуляции высокочастотного сигнала, состоящем из линейного четырехполюсника, двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, дополнительно четырехполюсник выполнен в виде П-образного соединения трех резистивных двухполюсников, нелинейный элемент включен в поперечную цепь между выходом источника высокочастотного сигнала и входом четырехполюсника, к выходу четырехполюсника подключена нагрузка, мнимые составляющие сопротивлений нагрузки xn и источника высокочастотного сигнала х0 реализованы реактивными двухполюсниками в виде параллельно соединенных двух последовательных колебательных контуров, значения параметров которых L1k, C1k и L2k, C2k выбраны с помощью следующих математических выражений:



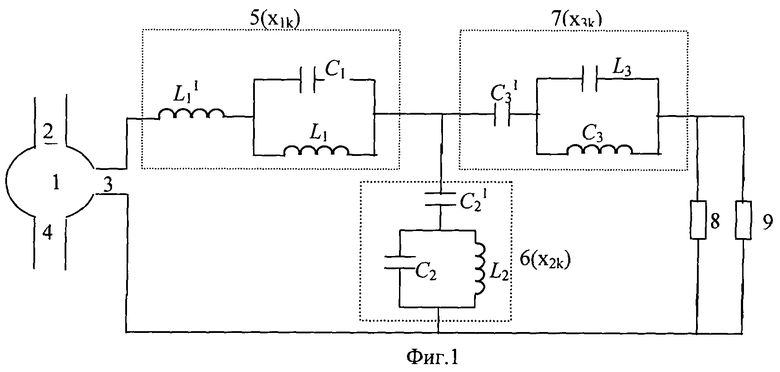
На фиг.1 показана схема устройства демодуляции фазомодулированных радиочастотных сигналов (прототип).
На фиг.2 показана структурная схема предлагаемого устройства по п.2.
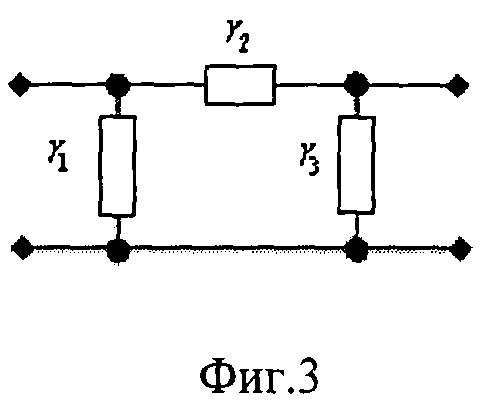
На фиг.3 приведена схема четырехполюсника предлагаемого устройства по п.2.
На фиг.4 приведена схема каждого из двухполюсников, формирующих мнимые составляющие сопротивлений источника высокочастотного сигнала и высокочастотной нагрузки предлагаемого устройства по п.2
Устройство-прототип содержит циркулятор 1 с входным 2, нагрузочным 3 и выходным 4 плечами, четырехполюсник из трех двухполюсников с реактивными сопротивлениямих x1k - 5, x2k - 6, x3k - 7, соединенных между собой по Т-схеме, а также полупроводниковый диод 8, подключенный параллельно к источнику сигнала модуляции 9. Двухполюсник 7 подключен к диоду 8, двухполюсник 5-к нагрузочному плечу 3 циркулятора 1.
Принцип действия устройства манипуляции и модуляции параметров сигнала (прототипа) состоит в следующем.
Высокочастотный сигнал от источника (на фигуре 1 не показан) через входное плечо 2 циркулятора 1 поступает в нагрузочное плечо (нагрузка не показана) 3. В результате взаимодействия пришедшего сигнала с реактивными элементами и диодом и благодаря специальному выбору значений реактивных элементов двухполюсников, значения фаз и амплитуд отраженных сигналов на двух частотах оказывается такими, что в результате их интерференции на выходное плечо 4 циркулятора 1 поступают сигналы, амплитуда и фаза которых в одном состоянии диода 8, определяемом одним крайним значением сигнала модуляции источника 9, отличаются от амплитуды и фазы этих сигналов в другом состоянии диода 8 на заданные величины на соответствующих двух частотах. Максимальная девиация фазы может составлять 360º, минимальная - ноль, максимальное отношение амплитуд равно ∞. Отношения модулей и разности фаз коэффициента отражения реализуются на обеих частотах одинаковыми.
Основным недостатком этого способа и устройства является отсутствие возможности одновременного обеспечения манипуляции (модуляции) амплитуды и фазы проходного сигнала в заданной полосе частот.
Структурная схемы обобщенного предлагаемого устройства по п.2 (фиг.2) состоит из резистивного четырехполюсника 11, двухэлектродного нелинейного элемента 8, источника управляющего низкочастотного сигнала 9 и нагрузки 12. Резистивный четырехполюсник выполнен в виде П-образного соединения трех резистивных двухполюсников (фиг.3), сопротивления которых могут быть выбраны произвольно или из каких-либо физических соображений. Частотные зависимости мнимых составляющих сопротивлений источника высокочастотного сигнала и нагрузки выбраны из условий обеспечения заданных зависимостей отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданных зависимостей модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого (при этом уровни выбираются из условия реализации квазилинейного участка модуляционной характеристики), в заданной полосе частот. Реализация этих зависимостей осуществлена реактивными двухполюсниками в виде параллельно соединенных двух последовательных колебательных контуров (фиг.4), значения параметров которых L1k, C1k и L2k, C2k выбраны из указанных условий с помощью определенных математических выражений. Реальные сопротивления источника высокочастотного сигнала и нагрузки могут быть чисто активными (это часто встречается на практике). В этом случае мнимые составляющие сопротивлений источника высокочастотного сигнала и высокочастотной нагрузки, реализованные указанным образом, подключаются последовательно к соответствующим активным сопротивлениям. Выполнение четырехполюсника резистивным является дополнительной возможностью увеличения квазилинейного участка модуляционной характеристики рабочей полосы частот, поскольку параметры резистивных элементов не зависят от частоты в очень большой полосе частот.
Принцип действия данного устройства состоит в том, что при подаче несущего высокочастотного сигнала от источника 10 с сопротивлением z0 в результате специального выбора значений элементов реактивных двухполюсников будут реализованы заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот. В результате возникают свойства формирования дискретных или аналоговых модулированных по амплитуде и фазе высокочастотных сигналов.
Докажем возможность реализации указанных свойств.
Пусть известны зависимости действительных составляющих комплексных сопротивлений нагрузки zн=rн+jxн и источника высокочастотного сигнала z0=r0+jx0 от частоты. Известна также зависимость проводимости двухполюсного управляемого нелинейного элемента y1,2=g1,2+jb1,2 в двух состояниях, определяемых двумя уровнями амплитуды низкочастотного сигнала, от частоты. Здесь и далее аргумент (частота) для простоты опущен. Таким образом, нелинейный элемент характеризуется матрицей передачи:

Резистивный четырехполюсник (РЧ) описывается матрицей передачи:

где 


Общая нормированная классическая матрица передачи модулятора получается путем перемножения матриц (1) и (2) с учетом условий нормировки:

Используя известную связь элементов матрицы рассеяния с элементами матрицы передачи (3) [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с], получим выражение для коэффициента передачи модулятора 

где g20=1+gr0-bx0; b20=gx0+br0.
Входящий в (4) корень можно представить в виде комплексного числа a+jb, где
После денормировки коэффициента передачи (4) путем умножения на 
Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом 
Пусть требуется определить частотные зависимости мнимых составляющих сопротивлений нагрузки xн и источника высокочастотного сигнала x0, оптимальные по критерию обеспечению заданных зависимостей отношения модулей m и разности фаз φ передаточной функции в двух состояниях нелинейного элемента от частоты в заданной полосе частот:

Подставим (4) в (5) и после несложных преобразований и разделения комплексного уравнения на действительную и мнимую части, получим систему двух алгебраических уравнений, эквивалентных заданным зависимостям отношения модулей m и разности фаз φ передаточной функции в двух состояниях от частоты:
Решение системы (6) относительно x0, хн имеет смысл зависимостей мнимых составляющих сопротивления источника сигнала и высокочастотной нагрузки от частоты, оптимальных по критерию обеспечения заданных зависимостей отношения модулей m и разности фаз φ передаточной функции в двух состояниях нелинейного элемента от частоты в заданной полосе частот (аппроксимирующих функций):
Для реализации оптимальных характеристик (7) методом интерполяции необходимо сформировать двухполюсники с сопротивлениями x0, xn из не менее, чем N (числа частот интерполяции) реактивных элементов, найти выражения для их сопротивлений, приравнять их оптимальным значениям сопротивлений двухполюсников на заданных частотах, определенным по формулам (7) и решить сформированную таким образом систему N уравнений относительно N выбранных параметров реактивных элементов. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например, из условия физической реализуемости.
В соответствии с этим алгоритмом получены математические выражения для определения значений параметров L1k, C1k и L2k, C2k реактивного двухполюсника в виде параллельно соединенных двух последовательных контуров (фиг.4), оптимальных по критерию обеспечения указанных условий совпадения реальных сопротивлений с характеристиками (7) на четырех частотах. Исходная система уравнений:
Реализация оптимальных аппроксимаций частотных характеристик (7) с помощью (8), (9) обеспечивает увеличение полосы частот, в пределах которой выполняются условия совпадения (9) реальных частотных характеристик (8) с оптимальными (7) на четырех частотах заданной полосы частот.Это позволяет при разумном выборе положений заданных частот относительно друг друга ω1-ω2, ω1-ω3, ω1-ω4, ω2-ω3, ω2-ω4, ω3-ω4 расширить полосу частот, в пределах которой обеспечиваются заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот. При разумном выборе обоих уровней амплитуды управляющего сигнала при этом будут сформированы квазилинейные участки фазовой и амплитудной модуляционных характеристик для осуществления режима модуляции. Использование обоих уровней обеспечивает режим манипуляции.
В качестве резистивного четырехполюсника может быть выбрана любая типовая схема с известными элементами классической матрицы передачи [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1965. 40 с.], например П-образное соединение трех резистивных двухполюсников (фиг.3), для которого:

Значения сопротивлений r1, r2, r3 могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например из условий физической реализуемости параметров, определяемых с помощью (9), или из условия дополнительного увеличения полосы частот, в пределах которой сохраняются перечисленные функции.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестны способ и устройство амплитудно-фазовой модуляции, обеспечивающие заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого (при этом уровни выбираются из условия реализации квазилинейного участка модуляционной характеристики), в заданной полосе частот за счет специального выбора частотных зависимостей мнимых составляющих сопротивлений источника высокочастотного сигнала и нагрузки, включения нелинейного двухэлектродного элемента между выходом источника высокочастотного сигнала и входом резистивного четырехполюсника в поперечную цепь, подключения нагрузки к выходу четырехполюсника, выполнения четырехполюсника в виде Т-образного соединения трех резистивных двухполюсников и реализации мнимых составляющих сопротивлений нагрузки xn и источника высокочастотного сигнала x0 реактивными двухполюсниками в виде параллельно соединенных двух последовательных колебательных контуров, значения параметров которых L1k, C1k и L2k, C2k выбраны по соответствующим математическим выражениям.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника резиставным в виде указанной выше схемы, включение двухполюсного нелинейного элемента между выходом источника высокочастотного сигнала и входом резистивного четырехполюсника в поперечную цепь, подключения нагрузки к выходу четырехполюсника, реализация мнимых составляющих сопротивлений нагрузки и источника высокочастотного сигнала реактивными двухполюсниками в виде параллельно соединенных двух последовательных колебательных контуров, значения параметров которых L1k, C1k и L2k, C2k выбраны по соответствующим математическим выражениям) обеспечивают заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды (параметрические диоды, p-i-n диоды, ЛПД, туннельные диоды, диоды Ганна и т.д.), индуктивности и емкости, сформированные в заявленную схему реактивных двухполюсников. Значения сопротивлений реактивных двухполюсников, индуктивностей и емкостей могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении заданных зависимостей отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, что способствует формированию модулированных или манипулированных по амплитуде и (или) по фазе высокочастотных сигналов в большей полосе частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АМПЛИТУДНО-ФАЗОВОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНОГО СИГНАЛА И УСТРОЙСТВО ЕГО РЕАЛИЗЦИИ | 2011 |
|
RU2496225C2 |
| СПОСОБ АМПЛИТУДНО-ФАЗОВОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНОГО СИГНАЛА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2496223C2 |
| СПОСОБ АМПЛИТУДНО-ФАЗОВОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНОГО СИГНАЛА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2496224C2 |
| СПОСОБ АМПЛИТУДНО-ФАЗОВОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНОГО СИГНАЛА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2494528C2 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ И ДЕМОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483436C2 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ И ДЕМОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483435C2 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ И ДЕМОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2463689C1 |
| СПОСОБ АМПЛИТУДНОЙ, ФАЗОВОЙ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2488946C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2491711C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2488950C2 |
Изобретения относятся к области радиосвязи и радиолокации и могут быть использованы для амплитудной, фазовой и амплитудно-фазовой модуляции или манипуляции высокочастотных сигналов. Техническим результатом является одновременное обеспечение модуляции амплитуды и фазы высокочастотного сигнала при заданных зависимостях отношения модулей и разности фаз передаточной функции модулятора в двух состояниях управляемого нелинейного элемента, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты в заданной полосе частот. Устройство амплитудно-фазовой модуляции высокочастотного сигнала состоит из линейного четырехполюсника, двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, отличается тем, что четырехполюсник выполнен в виде П-образного соединения трех резистивных двухполюсников, нелинейный элемент включен в поперечную цепь между выходом источника высокочастотного сигнала и входом четырехполюсника, к выходу четырехполюсника подключена нагрузка. 2 н.п. ф-лы, 4 ил.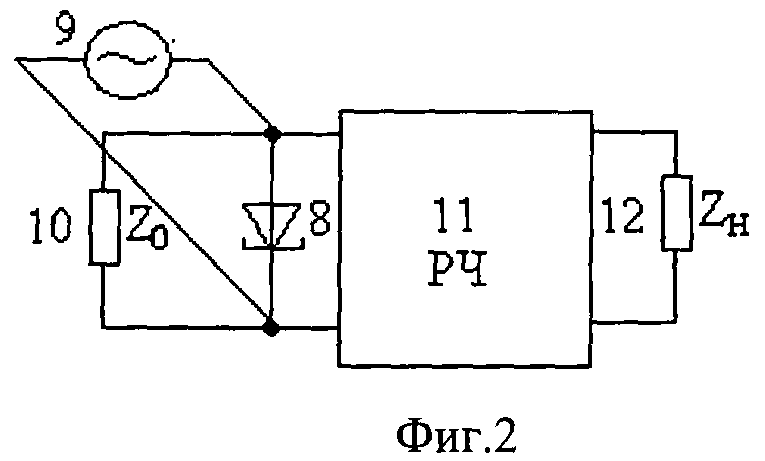
1. Способ амплитудно-фазовой модуляции высокочастотного сигнала, состоящий в том, что высокочастотный сигнал подают на модулятор, выполненный из четырехполюсника, управляемого двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, амплитуду и фазу высокочастотного сигнала изменяют путем изменения амплитуды управляющего низкочастотного сигнала на нелинейном элементе, отличающийся тем, что четырехполюсник выполняют резистивным, нелинейный элемент включают в поперечную цепь между выходом источника высокочастотного сигнала и входом четырехполюсника, к выходу четырехполюсника подключают нагрузку, заданные зависимости отношения модулей и разности фаз передаточной функции модулятора в двух состояниях, определяемых двумя уровнями управляющего низкочастотного сигнала, от частоты и заданные зависимости модуля и фазы передаточной функции модулятора от амплитуды управляющего низкочастотного сигнала, непрерывно изменяемой в пределах от одного уровня управляющего низкочастотного сигнала до другого, в заданной полосе частот обеспечивают за счет выбора частотных характеристик мнимых составляющих сопротивлений нагрузки хн источника высокочастотного сигнала x0 с помощью следующих математических выражений:
где A0=(rн+β)g2+a1+(rн+β)b1msinφ-[(rн+β)g1+a1]mcosφ; a1=α+γrн;
B0=(rн+β)b2r0-m{[(1+g1r0)(rн+β)+a1r0]sinφ+(rн+β)b1r0cosφ};
C0=b2-m[(g1+γ)sinφ+b1cosφ]; D0=m[(1+g1r0+γr0)cosφ-b1r0sinφ]-1-g2r0-γr0;
X=m{[C0b1(rн+β)+(γ+g1)A0]cosφ}+[C0g1(rн+β)+C0a1-b1A0]sinφ-(γ+g2)A0-C0b2(rн+β);
Y=(rн+β)[C0(1+g2r0)-b2D0]+C0rнa1-(γ+g2)B0+[a1D0-b1B0+(rн+β)(g1D0+b1C0r0)+A0(1+g1r0)]sinφ+Bccosφ;
Z=(rн+β)D0(1+g2r0)+a1r0D0-b2r0B0+[B0(1+g1r0+γr0)+(rн+β)b1r0D0]msinφ-Ccmcosφ;
Bc=-a1r0C0+(g1+γ)B0+(rн+β)(b1D0-g1C0r0-C0)+A0b1r0;
Cc=(rн+β)(1+g1r0)D0+a1D0r0-B0b1r0,



2. Устройство амплитудно-фазовой модуляции высокочастотного сигнала, состоящее из линейного четырехполюсника, двухэлектродного нелинейного элемента, источника управляющего низкочастотного сигнала и нагрузки, отличающееся тем, что четырехполюсник выполнен в виде П-образного соединения трех резистивных двухполюсников, нелинейный элемент включен в поперечную цепь между выходом источника высокочастотного сигнала и входом четырехполюсника, к выходу четырехполюсника подключена нагрузка, мнимые составляющие сопротивлений нагрузки xn и источника высокочастотного сигнала x0 реализованы реактивными двухполюсниками в виде параллельно соединенных двух последовательных колебательных контуров, значения параметров которых L1k, C1k и L2k, C2k выбраны с помощью следующих математических выражений:


где 
x=a1c2ω4-a2c1ω3; y=(a1d2+b1c2)ω4-(a2d1+b2c1)ω3; z=b1d2ω4-b2d1ω3;












где A0=(rн+β)g2n+a1+(rнn+β)b1mnsinφn-[(rнn+β)g1+a1]mncosφn; a1=α+γrнn;
B0=(rнn+β)b2nr0-mn{[(1+g1nr0n)(rнn+β)+a1r0n]sinφn+(rнn+β)b1r0ncosφn};
C0=b2n-mn[(g1n+γ)sinφn+b1ncosφn]; D0=mn[(1+g1nr0n+γr0n)cosφ-b1nr0nsinφn]-1-g2nr0n-γr0n;
X=mn{[C0b1n(rнn+β)+(γ+g1n)A0]cosφn}+[C0g1n(rнn+β)+C0a1-b1nA0]sinφn-(γ+g2n)A0-C0b2n(rнn+β);
Y=(rнn+β)[C0(1+g2nr0n)-b2nD0]+C0rнna1-(γ+g2n)B0+[a1D0-b1nB0+(rнn+β)(g1nD0+b1nC0r0n)+A0(1+g1nr0n)]sinφn+Bccosφn;
Z=(rнn+β)D0(1+g2nr0n)+a1r0nD0-b2nr0nB0+[B0(1+g1nr0n+γr0n)+(rнn+β)b1nr0nD0]mnsinφn-Ccmncosφn;
Bc=a1r0nC0+(g1n+γ)B0+(rнn+β)(b1nD0-g1nC0r0n-C0)+A0b1nr0n; Cc=(rнn+β)(1+g1nr0n)D0+a1D0r0n-B0b1nr0n.


| Устройство для модуляции отраженного сигнала | 1990 |
|
SU1800579A1 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2354040C1 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2342769C2 |
| US 5155455 A, 13.10.1992. | |||

