Изобретение относится к радиосвязи и может быть использовано для формирования требуемых АЧХ и ФЧХ фазоманипулированных, амплитудно-манипулированных, а также амплитудно-фазоманипулированных сигналов в заданной полосе частот и преобразования частоты (переноса спектра входного сигнала по оси частот).
Известен способ манипуляции (модуляции) параметров отраженного сигнала, состоящий в том, что входное сопротивление устройства манипуляции изменяют таким образом, что коэффициент отражения этого устройства изменяет фазу на π, π/2, π/4, причем для разделения входного и отраженного сигнала используют циркулятор [Радиопередающие устройства. /Под редакцией О.А.Челнокова-М.: Радио и связь, 1982, стр.152-156]. Известно устройство реализации этого способа [там же], состоящее из циркулятора, первый вход которого подключен к источнику сигнала, третий вход подключен к нагрузке, а второй подключен к отрезку разомкнутой линии передачи длиной λ/4, вначале которой включен p-i-n диод.
Если диод закрыт, то от сечения, в котором он включен, происходит отражение, отраженная волна попадает в нагрузку с сопротивлением 50 Ом. Если диод открыт, то отражение происходит от конца линии. Фаза отраженного сигнала в одном состоянии диода отличается от фазы отраженного сигнала в другом состоянии диода на π. При необходимости изменения разности фаз длина отрезка линии передачи изменяется соответствующим образом.
Недостатком этого способа и устройства его реализации является то, что в двух состояниях диода изменяется только фаза отраженного сигнала, причем заданные значения разности фаз отраженного сигнала в двух состояниях диода обеспечиваются только на одной фиксированной частоте. Другим недостатком является постоянство амплитуды отраженного сигнала в двух состояниях диода, то есть отсутствие манипуляции амплитуды, что сужает функциональные возможности. Например, это не позволяет обеспечить два канала радиосвязи на одной несущей частоте (один канал можно образовать с помощью манипуляции амплитуды, а другой - с помощью манипуляции фазы не позволяет обеспечить кодировку передаваемой информации). Третьим недостатком следует считать большие массы и габариты, связанные с необходимостью использования отрезков линии передачи. Четвертым недостатком является то, что устройство манипуляции, состоящее из управляемой и неуправляемой частей, включается между источником сигнала и нагрузкой, которые имеют определенные значения сопротивлений. Источник сигнала имеет чисто действительное сопротивление (второй вход). Нагрузка для отраженного сигнала (третий вход) имеет также действительное сопротивление. Манипулятор подключен к разомкнутой (бесконечное сопротивление) или к замкнутой (нулевое сопротивление) линии передачи. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы проходного сигнала. Основным недостатком является отсутствие возможности усиления сигнала с заданными коэффициентами усиления в двух состояниях.
Известен способ манипуляции фазы отраженного сигнала, основанный на использовании двухимпедансных устройств СВЧ [В.Г.Соколинский, В.Г.Шейнкман. Частотные и фазовые модуляторы и манипуляторы. - М.: Радио и связь, 1983, стр.146-158]. Известно устройство реализации этого способа [там же], состоящее из определенного количества реактивных элементов типа L, C параметры которых выбраны из условия обеспечения требуемой произвольной разности фаз коэффициента отражения.
По сравнению с предыдущим способом и устройством данный способ и устройство его реализации не требуют использования полупроводниковых диодов только в открытом и только закрытом состояниях. При любых состояниях диодов, определяемых двумя уровнями низкочастотного управляющего воздействия, при определенных значениях параметров типа L, С может быть обеспечено заданное значение разности фаз отраженного сигнала на фиксированной частоте. Если амплитуда управляющего низкочастотного сигнала между указанными двумя уровнями изменяется непрерывно, то обеспечивается модуляция.
Недостатком является то, что, как и первый способ и устройство, манипулятор может быть включен только между определенными сопротивлениями. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы и не усиливают амплитуду проходного сигнала с заданными коэффициентами усиления в двух состояниях.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ [Головков А.А. Устройство для модуляции отраженного сигнала. Авт. св-во № 1800579 от 09.10.1992 года], состоящий в том, что неуправляемую часть (согласующе-фильтрующее устройство) формируют из определенным образом соединенных между собой двухполюсников, сопротивление каждого двухполюсника выбирают из условия обеспечения одинакового заданного двухуровневого закона изменения амплитуды и фазы отраженного сигнала при изменении управляемого элемента из одного состояния в другое под действием управляющего низкочастотного напряжения или тока.
Известно устройство (прототип) реализации способа [там же], содержащее циркулятор, первое и третье плечи которого являются СВЧ-входом и выходом, а во второе плечо включены реактивный четырехполюсник и полупроводниковый диод, подключенный к источнику низкочастотного управляющего воздействия, при этом четерехполюсник выполнен в виде Т-образного соединения двухполюсников со значениями реактивных сопротивлений, которые выбраны из условия обеспечения требуемых законов двухуровневого изменения амплитуды и фазы отраженного сигнала на двух заданных частотах. Так же как и в предыдущем способе и устройстве реализации, возможна модуляция фазы и амплитуды, если управляющий сигнал изменяется непрерывно.
Недостатком является то, что, как и в первых двух способах и устройствах, манипулятор может быть включен только между определенными сопротивлениями. Следующим важным недостатком является то, что данный способ и данное устройство не обеспечивают манипуляцию амплитуды и фазы проходного сигнала в двух состояниях. Третьим важным недостатком является то, что значения модулей и фаз в каждом из состояний не контролируются. Известно лишь отношение модулей и разность фаз.
Техническим результатом изобретения является обеспечение манипуляции амплитуды и фазы проходного сигнала в двух состояниях управляемого элемента при контролируемых модуле и фазе коэффициента передачи в каждом из состояний с использованием реактивных элементов в согласующих четырехполюсниках и включении манипулятора между источником сигнала и нагрузкой с комплексными сопротивлениями.
1. Указанный результат достигается тем, что в способе модуляции амплитуды и фазы радиочастотных сигналов, состоящем в том, что на вход модулятора подают радиочастотный гармонический сигнал, модулятор выполняют из реактивного четырехполюсника, двухполюсного управляемого элемента, соединенного с источником низкочастотного управляющего сигнала, четырехполюсник выполняют из числа двухполюсников, не меньшего двух, значения параметров которых выбраны из условия обеспечения требуемых амплитудно-частотных и фазочастотных характеристик в двух состояниях управляемого элемента, определяемых двумя уровнями низкочастотного управляющего сигнала, дополнительно двухполюсный управляемый элемент включают между источником сигнала и входом четырехполюсника в продольную (последовательно) цепь, к выходу четырехполюсника подключают нагрузку с комплексным сопротивлением для проходных модулированных радиочастотных сигналов, сопротивление источника сигнала выбирают комплексным, количество двухполюсников выбирают не меньше трех, значения параметров реактивных элементов, формирующих двухполюсники четырехполюсника, выбирают из условия обеспечения заданных значений фаз φ1,2 коэффициентов передачи в первом и втором состояниях и заданных значений модулей m1, m2 коэффициента передачи в первом и втором состояниях, а также из условия определения значения действительной составляющей сопротивления нагрузки rн, при котором обеспечивается физическая реализуемость четырехполюсника, при этом указанные условия реализуются следующими математическими выражениями:
 a, b, с, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; хн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, х1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала.
a, b, с, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; хн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, х1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала.
2. Указанный результат достигается тем, что в устройстве модуляции амплитуды и фазы радиочастотных сигналов, состоящем из двухполюсного управляемого элемента, реактивного четырехполюсника, выполненного из числа двухполюсников, не меньшего двух, значения параметров которых выбраны из условия обеспечения требуемых амплитудно-частотных и фазочастотных характеристик в двух состояниях управляемого элемента, подключенного к источнику низкочастотного управляющего сигнала, дополнительно четырехполюсник выполнен из двухполюсников, количество которых выбрано не меньше трех, управляемый элемент включен между источником радиочастотных сигналов и входом реактивного четырехполюсника в продольную цепь, к выходу четырехполюсника подключена нагрузка с комплексным сопротивлением для проходных модулированных по амплитуде и фазе радиочастотных сигналов, четырехполюсник выполнен из четырех двухполюсников в виде двух каскадно-соединенных Г-образных звеньев с реактивными сопротивлениями х1, х2, x3, x4, при этом значения сопротивлений двухполюсников, формирующих четырехполюсник, выбраны из условий обеспечения требуемых значений фазы (φ1, φ2) и модулей (m1, m2) коэффициентов передачи в первом и втором состояниях, определяемых двумя крайними значениями низкочастотного управляющего сигнала, а также из условия определения значения действительной составляющей сопротивления нагрузки rн, при котором достигается физическая реализуемость четырехполюсника, при этом сопротивления двухполюсников и перечисленные условия в математической форме определяются следующим образом:
 a, b, с, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; xн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, x1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала; х3 - реактивное сопротивление третьего двухполюсника, значение которого выбрано из условия физической реализуемости x1, x2, x4.
a, b, с, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; xн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, x1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала; х3 - реактивное сопротивление третьего двухполюсника, значение которого выбрано из условия физической реализуемости x1, x2, x4.
На фиг.1 показана схема устройства модуляции амплитуды и фазы радиочастотных сигналов (прототип).
На фиг.2 показана структурная схема предлагаемого устройства по п.2.
На фиг.3 приведена схема четырехполюсника по п.3, входящая в предлагаемое устройство.
Устройство-прототип содержит циркулятор 1 с входным 2, нагрузочным 3 и выходным 4 плечами, три двухполюсника с реактивными сопротивлениями х1 - 5, х2 - 6, х3 - 7, соединенных между собой по Т-схеме, а также полупроводниковый диод 8, подключенный параллельно к источнику сигнала модуляции 9. Двухполюсник 7 подключен к диоду 8, двухполюсник 5 - к нагрузочному плечу 3 циркулятора 1.
Принцип действия устройства манипуляции параметров сигнала (прототип) состоит в следующем.
Высокочастотный сигнал от источника (на фиг.1 не показан) через входное плечо 2 циркулятора 1 поступает в нагрузочное плечо 3. В результате взаимодействия пришедшего сигнала с реактивными элементами и диодом и благодаря специальному выбору значений реактивных элементов двухполюсников значения фаз и амплитуд отраженных сигналов на двух частотах оказываются такими, что в результате их интерференции на выходное плечо 4 циркулятора 1 поступают сигналы, амплитуда и фаза которых в одном состоянии диода 8, определяемом одним крайним значением сигнала модуляции источника 9, отличаются от амплитуды и фазы этих сигналов в другом состоянии диода 8 на заданные величины на соответствующих двух частотах. Максимальная девиация фазы может составлять 360°, минимальная - ноль, максимальное отношение амплитуд равно ∞. Отношения модулей и разности фаз коэффициента отражения реализуются на обеих частотах одинаковыми. Абсолютные значения модулей и фаз коэффициента отражения и коэффициента передачи неизвестны (не контролируются).
Высокочастотная часть структурной схемы обобщенного предлагаемого устройства по п.2 (фиг.2) состоит из каскадно-соединенных источника сигнала с сопротивлением Z0=r0+jx0 10, двухполюсного управляемого элемента 8 с сопротивлениями Z1,2=r1,2+jx1,2 в двух состояниях, определяемых на заданной высокой частоте двумя уровнями низкочастотного управляющего воздействия, реактивного четырехполюсника 11 и нагрузки 12 с сопротивлением Zн=rн+jxн.
Предлагаемое устройство модуляции параметров радиочастотных сигнала по п.2 (фиг.2) содержит источник радиочастотных сигналов 10, управляемый двухполюсный элемент 8, подключенный к источнику низкочастотного управляющего сигнала (сигнала модуляции) 9, а также реактивный четырехполюсник 11, выполненный (фиг.3) в виде каскадно-соединенных между собой двух Г-образных звеньев из четырех двухполюсников с сопротивлениями x1(5), x2(6), x3(7), x4(l3). Управляемый элемент 8 включен параллельно между источником сигнала 10 и двухполюсником 5, т.е. входом реактивного четырехполюсника 11. Двухполюсник 13 подключен к нагрузке 12.
Это устройство функционирует следующим образом. Благодаря специальному выбору количества реактивных элементов двухполюсников 5, 6, 7, 13 (фиг.3) схемы их соединений и значений их параметров при переключении управляющего (модулирующего) сигнала на управляемом двухполюсном элементе из одного уровня на другой будут реализованы заданные значения модулей и фаз коэффициентов передачи в этих двух состояниях. Модули входного сигнала и коэффициента передачи перемножаются, а их фазы складываются. Следовательно, выходной сигнал будет изменяться по закону изменения коэффициента передачи.
При непрерывном изменении амплитуды управляющего сигнала будет реализована модуляция проходного сигналов по амплитуде и фазе. Сопротивления x1, x2, x4 определяются аналитически по найденным математическим выражениям однозначно. При этом значения этих сопротивлений функциональным образом зависят от произвольно выбираемых значений сопротивления х3 или выбираемых исходя из каких-либо других физических соображений. В предлагаемом изобретении значение сопротивления x3 выбирается из условий обеспечения физически реализуемых значений х1, х2, х4, поскольку всегда желательно получить оптимальное расчетное значение сопротивления, которое бы реализовывалось значением индуктивности или емкости, близким к номинальному, выпускаемому промышленностью.
Значения сопротивлений х1, х2, х4 двухполюсников 5, 7, кроме того, зависят от оптимальных значений элементов матрицы передачи четырехполюсника и заданных комплексных сопротивлений (проводимостей) источника сигнала и нагрузки.
Докажем возможность реализации указанных свойств.
Пусть на фиксированной частоте известны сопротивления источника сигнала Z0=r0+jx0, нагрузки Zн=rн+jхн и управляемого элемента Z1,2=r1,2+jx1,2 в двух состояниях, определяемых уровнями управляющего воздействия.
Требуется определить минимальное количество элементов и значения параметров схемы СФУ (реактивного четырехполюсника РЧ), при которых в заданных состояниях управляемого элемента обеспечивались бы заданные значения модулей m1,2 и фаз φ1,2 коэффициента передачи:

Глубина амплитудной модуляции М и девиация фазы Δφ амплитудно-фазомодулированного сигнала определяются известными выражениями: 
 При М=0 имеем чисто фазовую модуляцию, а при Δφ=0 - амплитудную.
При М=0 имеем чисто фазовую модуляцию, а при Δφ=0 - амплитудную.
Таким образом, с учетом условия взаимности (x12=-x21) СФУ может характеризоваться матрицей сопротивления

и соответствующей классической матрицей передачи
где |x|=-х11x22-x21 2 - определитель матрицы (2).
Управляемый элемент в первом и втором состояниях характеризуется следующей матрицей передачи:
Перемножим матрицы (4 и 3) и с учетом условий нормировки [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971. с.34-36], получим выражения для нормированных матриц передачи всего устройства в каждом из состояний:

где х11, x21, x22 - элементы матрицы СФУ (2).
Используя известные соотношения между элементами матрицы передачи и элементами матрицы рассеяния, получим выражения для коэффициентов передачи манипулятора:

Подкоренное выражение в (6) можно представить в виде комплексного числа а1+jb1, где 
x=r0rH-x0xH; y=r0xH+x0rH.
После денормировки коэффициента передачи (6) путем умножения на  последнее выражение изменяется а1=rн; b1=xн.
последнее выражение изменяется а1=rн; b1=xн.
Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом: 
Для получения взаимосвязей, оптимальных по критерию обеспечения заданных значений модулей и фаз коэффициента передачи модулятора в двух состояниях управляемого элемента, подставим (6) в (1) и после разделения действительной и мнимой частей между собой получим систему двух уравнений:
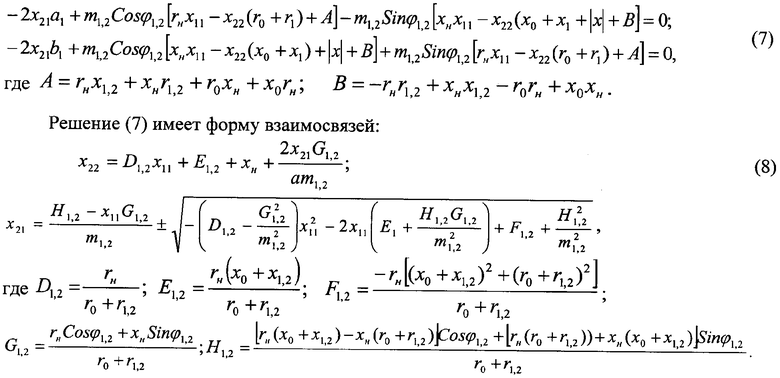
Взаимосвязи (8), записанные для двух состояний, должны быть попарно равны, поскольку характеризуют один и тот же четырехполюсник. Полученные из этих равенств уравнения совместно не решаются. Поэтому необходимо перейти от взаимосвязей между элементами матрицы сопротивлений к взаимосвязям между элементами классической матрицы передачи:




где  a, b, c, d - элементы классической матрицы передачи.
a, b, c, d - элементы классической матрицы передачи.
Взаимосвязи между элементами классической матрицы передачи, оптимальные по критерию обеспечения заданных значений модулей и фаз коэффициентов передачи в двух состояниях, имеют вид

Таким образом, все четыре коэффициента α, β, γ, а оказываются строго заданными. Однако эти коэффициенты связаны между собой известным условием взаимности четырехполюсника [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971. с.14], которое в наших обозначениях имеет следующую форму:

Условие (11) накладывает ограничение на одну из величин, входящих в эти коэффициенты, например на значение действительной составляющей сопротивления нагрузки:

Выражение (12) обеспечивает условие (11). Поэтому для определения оптимальных значений сопротивлений двухполюсников, формирующих четырехполюсник, достаточно использовать любые три соотношения из четырех (10).
В данной работе используются коэффициенты α, β, γ. Это означает, что количество неуправляемых элементов в четырехполюснике должно быть не менее трех. Значения параметров этих элементов, оптимальных по критерию обеспечения требуемых значений m1,2, φ1,2, должны удовлетворять системе трех уравнений, формируемых на основе (10). Для этого необходимо взять пробную схему четырехполюсника, найти матрицу передачи этой схемы и представить ее в следующем виде:

Найденные таким образом элементы α, β, γ, выраженные через параметры схемы, нужно подставить в (10) и решить сформированную систему трех уравнений относительно выбранных трех параметров (например, сопротивлений двухполюсников). Значения остальных параметров могут быть выбраны произвольно или исходя из каких-либо других физических соображений. Эти параметры могут также относиться к управляемой части, то есть участвовать в формировании Z1, Z2 (входить в коэффициенты D, Е, F). Выражение (12) определяет значение действительной составляющей сопротивления нагрузки. Величины m1, m2, φ1, φ2 задаются исходя из требуемых значений глубины амплитудной модуляции и девиации фазы.
В соответствии с этим алгоритмом были определены математические выражения для отыскания оптимальных значений сопротивлений двухполюсников типовой схемы четырехполюсника в виде двух Г-образных звеньев.
Сопротивления двухполюсников схемы, изображенной на фиг.3, определяются с помощью следующих выражений:
 где
где 
После определения значений сопротивлений конкретная схема четырехполюсника формируется следующим образом. Если xn>0 (n=1, 2, 4 - номер двухполюсника), то это индуктивность  где f - заданная частота.
где f - заданная частота.
Если xn<0n то это емкость 
Подкоренное выражение в (14) в силу условия (11) всегда положительно.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестно устройство одновременной модуляции амплитуды и фазы, обеспечивающее заданные модули и фазы коэффициентов передачи в двух состояниях двухполюсного управляемого элемента, состоящее из управляемого двухполюсного элемента, включенного в продольную цепь (последовательно) между источником сигнала и входом реактивного четырехполюсника, причем четырехполюсник выполнен в виде каскадно-соединенных между собой двух Г-образных звеньев из двух реактивных двухполюсников каждое, параметры которых определены по соответствующим математическим выражениям. При этом значение сопротивления нагрузки выбрано оптимальным по критерию обеспечения физической реализуемости. В обоих состояниях управляемого элемента значения модулей и фаз коэффициентов передачи контролируются.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника реактивным в виде указанным выше способом соединенных между собой четырех двухполюсников, выбора значений их параметров из условия обеспечения заданных значений модулей и фаз коэффициентов передачи в двух состояниях на заданной частоте при изменении состояния управляемого двухполюсного элемента, включенного между источником сигнала и входом реактивного четырехполюсника в продольную цепь, выбор специальным образом значения действительной составляющей сопротивления нагрузки обеспечивает одновременно манипуляцию амплитуды и фазы проходного сигнала с требуемыми их значениями в двух состояниях и физическую реализуемость.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды, индуктивности и емкости, сформированные в заявленную схему реактивного четырехполюсника. Значения параметров индуктивностей и емкостей, а также действительной составляющей сопротивления нагрузки однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении заданных значений модулей и фаз коэффициентов передачи в двух состояниях управляемого элемента, а также манипуляции (модуляции) амплитуды и фазы сигнала по заданному закону с заданной глубиной амплитудной модуляции и девиацией фазы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2354039C1 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2354038C1 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2353049C1 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2663554C1 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342770C2 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2341006C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2342769C2 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341010C2 |
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2665903C1 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341011C2 |
Изобретение относится к радиосвязи и может быть использовано для формирования требуемых временных форм фазоманипулированных, амплитудно-манипулированных, а также амплитудно-фазоманипулированных сигналов. Способ модуляции амплитуды и фазы радиочастотных сигналов состоит в том, что на вход модулятора подают радиочастотный гармонический сигнал, модулятор выполняют из реактивного четырехполюсника, двухполюсного управляемого элемента, соединенного с источником низкочастотного управляющего сигнала, четырехполюсник выполняют из двухполюсников, при этом двухполюсный управляемый элемент включают между источником сигнала и входом четырехполюсника в продольную цепь, к выходу четырехполюсника подключают нагрузку с комплексным сопротивлением для проходных модулированных радиочастотных сигналов, сопротивление источника сигнала выбирают комплексным, количество двухполюсников равно четырем, значения параметров реактивных элементов, формирующих двухполюсники четырехполюсника, выбирают из условия обеспечения заданных значений фаз φ1,2 коэффициентов передачи в первом и втором состояниях и заданных значений модулей m1, m2 коэффициента передачи в первом и втором состояниях управляемого элемента, а также из условия определения значения действительной составляющей сопротивления нагрузки rн, при котором обеспечивается физическая реализуемость четырехполюсника, при этом указанные условия реализуются заданными математическими выражениями. Устройство модуляции амплитуды и фазы радиочастотных сигналов содержит двухполюсный управляемый элемент, реактивный четырехполюсник, выполненный из четырех двухполюсников в виде двух каскадно-соединенных Г-образных звеньев, источник низкочастотного управляющего сигнала, при этом значения сопротивлений двухполюсников выбраны из условий обеспечения требуемых значений фазы и модулей коэффициентов передачи в первом и втором состояниях управляемого элемента, определяемых двумя крайними значениями низкочастотного управляющего сигнала и, определены заданными математическими выражениями. 2 н.п. ф-лы, 3 ил.
1. Способ модуляции амплитуды и фазы радиочастотных сигналов, состоящий в том, что на вход модулятора подают радиочастотный гармонический сигнал, модулятор выполняют из реактивного четырехполюсника, двухполюсного управляемого элемента, соединенного с источником низкочастотного управляющего сигнала, четырехполюсник выполняют из числа двухполюсников, не меньшего двух, значения параметров которых выбраны из условия обеспечения требуемых амплитудно-частотных и фазочастотных характеристик в двух состояниях управляемого элемента, определяемых двумя уровнями низкочастотного управляющего сигнала, отличающийся тем, что двухполюсный управляемый элемент включают между источником сигнала и входом четырехполюсника в продольную цепь, к выходу четырехполюсника подключают нагрузку с комплексным сопротивлением для проходных модулированных радиочастотных сигналов, сопротивление источника сигнала выбирают комплексным, количество двухполюсников выбирают не меньше трех, значения параметров реактивных элементов, формирующих двухполюсники четырехполюсника, выбирают из условия обеспечения заданных значений фаз φ1,2 коэффициентов передачи в первом и втором состояниях и заданных значений модулей m1, m2 коэффициента передачи в первом и втором состояниях, а также из условия определения значения действительной составляющей сопротивления нагрузки rн, при котором обеспечивается физическая реализуемость четырехполюсника, при этом указанные условия реализуются следующими математическими выражениями:
 a, b, c, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; хн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, x1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала.
a, b, c, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; хн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, x1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала.
2. Устройство модуляции амплитуды и фазы радиочастотных сигналов, состоящее из, двухполюсного управляемого элемента, реактивного четырехполюсника, выполненного из числа двухполюсников, не меньшего двух, значения параметров которых выбраны из условия обеспечения требуемых амплитудно-частотных и фазочастотных характеристик в двух состояниях управляемого элемента, подключенного к источнику низкочастотного управляющего сигнала, отличающееся тем, что четырехполюсник выполнен из двухполюсников, количество которых выбрано не меньше трех, управляемый элемент включен между источником радиочастотных сигналов и входом реактивного четырехполюсника в продольную цепь, к выходу четырехполюсника подключена нагрузка с комплексным сопротивлением для проходных модулированных по амплитуде и фазе радиочастотных сигналов, четырехполюсник выполнен из четырех двухполюсников в виде двух каскадно-соединенных Г-образных звеньев с реактивными сопротивлениями х1, x2, x3, х4, при этом значения сопротивлений двухполюсников, формирующих четырехполюсник, выбраны из условий обеспечения требуемых значений фазы (φ1, φ2) и модулей (m1, m2) коэффициентов передачи в первом и втором состояниях, определяемых двумя крайними значениями низкочастотного управляющего сигнала, а также из условия определения значения действительной составляющей сопротивления нагрузки rн, при котором достигается физическая реализуемость четырехполюсника, при этом сопротивления двухполюсников и перечисленные условия в математической форме определяются следующим образом:

 a, b, c, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; xн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, x1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала; х3 - реактивное сопротивление четвертого двухполюсника, значение которого выбрано из условия физической реализуемости х1, х2, х4.
a, b, c, d - элементы классической матрицы передачи четырехполюсника; r0, x0 - заданные значения действительной и мнимой составляющих сопротивления источника сигнала; xн - заданное значение мнимой составляющей сопротивления нагрузки; r1,2, x1,2 - заданные значения действительной и мнимой составляющих сопротивления двухэлектродного управляемого элемента в двух состояниях, определяемых двумя уровнями низкочастотного управляющего сигнала; х3 - реактивное сопротивление четвертого двухполюсника, значение которого выбрано из условия физической реализуемости х1, х2, х4.
| Устройство для модуляции отраженного сигнала | 1990 |
|
SU1800579A1 |
| Способ последовательного согласования импедансов в диапазоне дискретных частот | 1989 |
|
SU1778827A1 |
| Теплоэнергетическая установка | 1985 |
|
SU1231237A1 |
| US 5155455 A, 13.10.1992. | |||

