Изобретение относится к ракетно-космической технике, а именно к многоразовому возвращаемому ракетному блоку (ВРБ), являющемуся первой ступенью многоразовой ракеты-носителя космического назначения (МРКН).
В авиакосмической технике известен выбранный в качестве прототипа многоразовый орбитальный корабль (ОК) «Буран», содержащий фюзеляж, крыло с двумя консолями, левый и правый блоки двигателей управления (БДУ), размещенные в хвостовой части фюзеляжа, и носовой БДУ, расположенный в носовой части фюзеляжа ([1], стр.40, 41, 193). На участке выведения на орбиту ОК является полезной нагрузкой для ракеты-носителя (маршевые двигатели на ОК «Буран» отсутствуют). После выполнения космического полета ОК совершает бездвигательный спуск в атмосфере (воздушно-реактивные двигатели отсутствуют), при этом управление движением ОК вокруг его центра масс при полете в верхних слоях атмосферы осуществляется с помощью двигателей управления, расположенных в левом и правом БДУ хвостовой части фюзеляжа. При этом оси сопел двигателей управления тангажом и креном перпендикулярны продольной оси (оси OX) ОК, образуют углы в 30° с нормальной осью (осью OY) ОК, а оси сопел двигателей управления рысканием параллельны поперечной оси (оси OZ) ОК.
Недостатком прототипа является невозможность использования его компоновки для многоразового ВРБ. Блоки двигателей управления не могут быть размещены ни в хвостовой, ни в носовой частях фюзеляжа, т.к. в хвостовой части фюзеляжа ВРБ размещена маршевая двигательная установка первой ступени ракеты-носителя, работающая на участке выведения, а в носовой части фюзеляжа ВРБ располагаются воздушно-реактивные двигатели, работающие на участке возвращения ВРБ к аэродрому в районе старта РН. Размещение БДУ в средней части фюзеляжа нецелесообразно, т.к. в этом случае двигатели управления будут неэффективны из-за малых величин плеч управляющих сил.
Другим недостатком прототипа является сильное влияние воздушного потока на газовые струи двигателей управления, в особенности на струи двигателей рыскания, оси сопел которых ориентированы вдоль поперечной оси OZ ОК перпендикулярно направлению полета. Наконец, еще одним недостатком прототипа является влияние силы тяги двигателей рыскания, возникающей при их срабатывании, на величины измеряемой датчиками системы управления поперечной перегрузки и угла скольжения.
Задачей изобретения является размещение БДУ на ВРБ и ориентация векторов сил тяги, при которых достигаются максимальные управляющие моменты двигателей управления с учетом взаимодействия струй двигателей управления с конструкцией ВРБ и воздушным потоком, а также возможность использования этих двигателей как на участке выведения, так и на участке возвратного полета.
Техническим результатом предлагаемого изобретения является обеспечение управляемости углового движения ВРБ на начальном участке выведения и участке возвратного полета и наибольшей эффективности двигателей управления путем оптимального размещения БДУ на ВРБ и выбора оптимальной ориентации векторов сил тяги двигателей управления.
Указанный технический результат достигается тем, что в многоразовом возвращаемом ракетном блоке, содержащем фюзеляж, крыло с двумя консолями, левый и правый блоки двигателей управления, в соответствии с изобретением, консоли крыла снабжены законцовками, левый и правый блоки двигателей управления размещены в гондолах на законцовках консолей крыла, с возможностью использования двигателей управления на участке выведения и участке возвратного полета, при этом оси сопел двигателей управления тангажом и креном параллельны нормальной оси OY ВРБ, а оси сопел двигателей рыскания перпендикулярны нормальной оси OY и образуют с продольной осью ОХ угол φ=0°…20°, величина которого выбирается из условия максимизации управляющего момента рыскания с учетом взаимодействия струй двигателей управления рысканием с конструкцией и воздушным потоком.
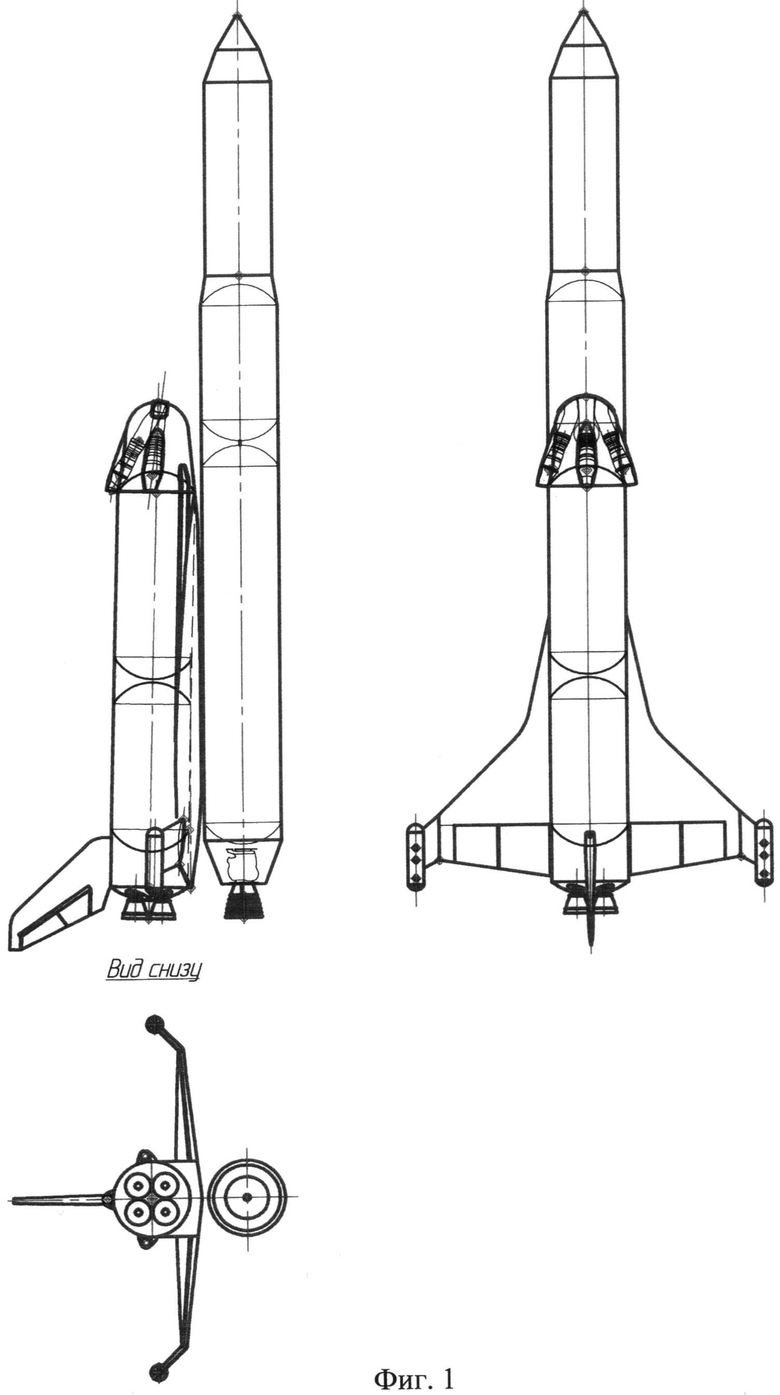
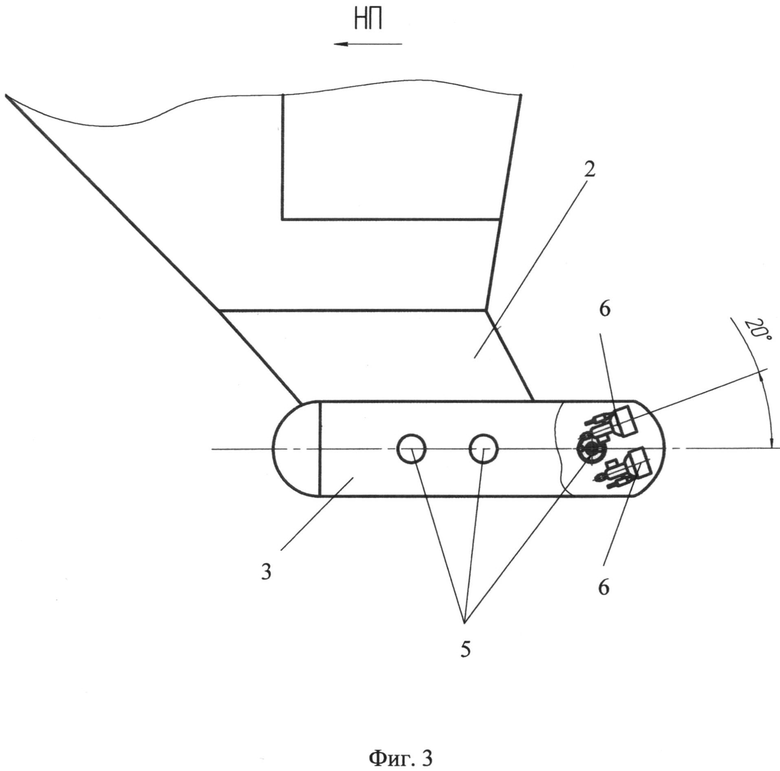
Сущность предлагаемого изобретения иллюстрируется фиг.1-3, где на фиг.1 показан общий вид многоразовой ракеты-носителя космического назначения, на фиг.2 - многоразовый возвращаемый ракетный блок, на фиг.3 - схема расположения двигателей управления. МРКН может включать один, два или более ВРБ (на фиг.1 показана МРКН с одним ВРБ).
Многоразовый возвращаемый ракетный блок фиг.1 содержит фюзеляж 1, крыло с двумя консолями, снабженными законцовками 2, левый 3 и правый 4 блоки двигателей управления, размещенные в гондолах на законцовках 2 консолей крыла, с возможностью использования двигателей управления на участке выведения и участке возвратного полета, при этом оси сопел двигателей управления тангажом и креном 5 параллельны нормальной оси OY ВРБ, а оси сопел двигателей рыскания 6 перпендикулярны нормальной оси OY и образуют с продольной осью OX угол φ=0°…20°, величина которого выбирается из условия максимизации управляющего момента рыскания с учетом взаимодействия струй двигателей управления рысканием 6 с конструкцией и воздушным потоком.
Многоразовый возвращаемый ракетный блок фиг.1 после выполнения своей задачи в качестве первой ступени отделяется на высоте около 50…52 км, совершает разворот по скоростному углу крена и выходит на траекторию возвратного полета. До достижения скоростным напором значения q=100 кгс/м2 аэродинамические органы управления ВРБ в каналах тангажа и крена (элевоны) неэффективны. В канале рыскания руль направления неэффективен до достижения ВРБ высот H=20…10 км. Поэтому для управления угловым движением ВРБ используются двигатели тангажа и крена 5 при q<100 кгс/м2 и двигатели рыскания 6 при H>10 км (см. фиг.2).
При этом БДУ 3 и 4 оказываются максимально удаленными от центра масс ВРБ, что обеспечивает максимальные значения управляющих моментов по крену. Углы ориентации сопел выбираются из условия максимизации плеч сил тяги двигателей управления (см. фиг.3). Для двигателей управления тангажом и креном 5 оптимальным является ориентация осей сопел параллельно нормальной оси OY. Эти двигатели используются при относительно малых значениях скоростного напора, поэтому их струи не «сбиваются» воздушным потоком как на старте, так и при входе в верхние слои атмосферы, где скоростной напор q≤100 кгс/м2. Для двигателей управления рысканием 6 выбрано направление осей сопел перпендикулярно нормальной оси OY, при этом они образуют угол φ=0°…20° с продольной осью OX ВРБ (см. фиг.3). Конкретное значение угла φ зависит от компоновки хвостовой части фюзеляжа и обеспечивает максимальный управляющий момент с учетом взаимодействия струй двигателей управления с конструкцией крыла, соплами маршевых двигателей и др., а также с воздушным потоком. Дополнительным преимуществом выбранной ориентации осей сопел двигателей рыскания 6 является повышение точности измерения поперечной перегрузки nZ и угла скольжения β, которые могут использоваться системой управления для стабилизации движения ВРБ на участке возвратного полета, так как существенно уменьшается возмущающее поперечное ускорение от тяги двигателей рыскания при их срабатывании. Кроме того, в связи с тем, что существенно увеличен управляющий момент двигателей управления 5 по крену за счет увеличения плеча сил тяги, эти двигатели могут быть использованы для стабилизации всей МРКН на начальном участке выведения. В частности, как показывают расчеты, с помощью двигателей управления 5 могут быть отработаны возмущения по крену от действия приземного ветра со скоростью до 15 м/с при несимметричной компоновке МРКН (с одним ВРБ). Тем самым разгружаются маршевые двигатели ВРБ, что позволяет осуществить балансировку и стабилизацию МРКН на меньших углах отклонения маршевых двигателей ВРБ на участке выведения.
Размещение гондол двигателей управления ВРБ на законцовках 2 консолей крыла позволяет также использовать эти двигатели для обеспечения «мягкого» отделения ВРБ от второй ступени МРКН (центрального блока), так как гондолы двигателей управления удалены на достаточное расстояние от конструкции второй ступени и двигатели при своей работе не «прожигают» центральный блок.
Еще одним преимуществом размещения гондол двигателей управления на законцовках 2 консолей крыла является уменьшение нагрузки на крыло, так как в этом случае момент от сил тяжести частично парирует момент от аэродинамических сил. Само наличие законцовок 2 консолей крыла обеспечивает независимость каналов системы управления ВРБ с помощью двигателей управления (исчезает «паразитный» момент двигателей управления рысканием в канале тангажа). Каждая из законцовок 2 образует с вертикальной плоскостью угол 40°…45°, что позволяет избежать взаимодействие струй двигателей управления тангажом и креном 5 с конструкцией крыла. Кроме того, наличие законцовок увеличивает степень боковой устойчивости ВРБ, увеличивается также жесткость крыла и его подъемная сила.
Таким образом, благодаря реализации предложенного в изобретении технического решения достигается указанный технический результат, а именно обеспечение управляемости углового движения ВРБ на начальном участке выведения и участке возвратного полета, и наибольшей эффективности двигателей управления путем оптимального размещения БДУ на ВРБ и выбора оптимальной ориентации векторов сил тяги двигателей управления.
Источники информации:
1. Ю.П. Семенов, Г.Е. Лозино-Лозинский, В.Л. Лапыгин, В.А. Тимченко и др. Многоразовый орбитальный корабль «Буран». М., «Машиностроение», 1995 г., 448 с.
Изобретение относится к ракетно-космической технике. Многоразовый возвращаемый ракетный блок содержит фюзеляж, крыло с двумя консолями, левый и правый блоки двигателей управления. Консоли крыла снабжены законцовками. Левый и правый блоки двигателей управления размещены в гондолах на законцовках консолей крыла с возможностью использования двигателей управления на участке выведения и участке возвратного полета. Оси сопел двигателей управления тангажом и креном параллельны нормальной оси OY возвращаемого ракетного блока. Оси сопел двигателей рыскания перпендикулярны нормальной оси OY и образуют с продольной осью OX угол φ=0°…20°. Достигается повышение управляемости возвращаемого ракетного блока. 5 ил.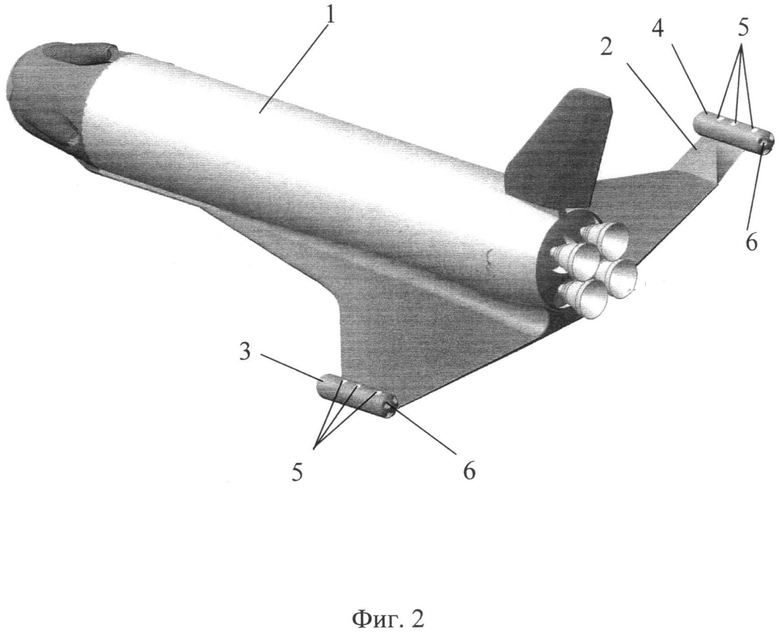
Многоразовый возвращаемый ракетный блок, содержащий фюзеляж, крыло с двумя консолями, левый и правый блоки двигателей управления, отличающийся тем, что консоли крыла снабжены законцовками, левый и правый блоки двигателей управления размещены в гондолах на законцовках консолей крыла с возможностью использования двигателей управления на участке выведения и участке возвратного полета, при этом оси сопел двигателей управления тангажом и креном параллельны нормальной оси OY возвращаемого ракетного блока, а оси сопел двигателей рыскания перпендикулярны нормальной оси OY и образуют с продольной осью OX угол φ=0…20°.
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ РАКЕТЫ-НОСИТЕЛЯ | 2006 |
|
RU2321526C1 |
| РАКЕТНЫЙ БЛОК МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2053168C1 |
| US 2003183727 A1, 02.10.2003 | |||
| US 6612522 B1, 02.09.2003. | |||

