Изобретение относится к исполнительным коммутирующим устройствам датчиков требуемого физического параметра систем автоматики взрывоопасных технических объектов, которые могут подвергаться аварийным воздействиям (ударным воздействиям при падении и(или) воздействиям угловых ускорений).
В настоящее время известны различные конструкции исполнительных коммутирующих устройств системы автоматики взрывоопасных технических объектов, которые могут подвергаться аварийным воздействиям, однако они, обладая определенными достоинствами, зачастую не могут обеспечить гарантированную безопасность указанных объектов в аварийных ситуациях.
Известно исполнительное коммутирующее устройство «Моторное реле времени ВС-10», предназначенное для коммутации электрических цепей [Г.В. Дружинин «Реле времени» // Библиотека по автоматике. М. - Л., изд-во «Энергия» - 1966 - №200 - С.67, рис.34].
Реле содержит корпус, контактную систему и электромагнитный привод.
Реле также содержит дополнительную контактную систему, при подаче электропитания на ее контакты вращение от привода через редуктор и шестерню передается на ось с установленными дисками, на которых размещены упоры, взаимодействующие с кулачками переключения контактов контактных систем.
Конструктивное исполнение контактных систем не обеспечивает их стойкость при ударных воздействиях большой интенсивности.
Известно исполнительное коммутирующее устройство, предназначенное для коммутации электрических цепей [патент РФ №2367050 C1, H01H 35/14, опубл. 08.07.2008]. Это исполнительное коммутирующее устройство принято за прототип как наиболее близкое по технической сущности к заявляемому устройству.
Исполнительное коммутирующее устройство содержит корпус, контактную систему, перемыкатель с токопроводящими секторами, взаимодействующими с расположенными по окружности контактами, электромагнитный привод с ротором и датчик физического параметра, электрически связанный с электромагнитным приводом.
Контактная система содержит перемыкатель с токопроводящими секторами, установленными на одной оси с возможностью взаимодействия с контактами основной и дополнительной контактной системы, расположенными по окружности, при этом электромагнитный привод выполнен в виде двухпозиционного поляризованного реле с возвратно-поворотным движением якоря и кинематически связанного с ним храпового механизма с возможностью пошагового однонаправленного поворота оси, на которой жестко закреплен перемыкатель.
Данное исполнительное коммутирующее устройство обеспечивает сохранение состояния контактной системы в аварийных ситуациях.
Однако выполнение электромагнитного привода в виде двухпозиционного поляризованного реле с возвратно-поворотным движением якоря делает конструкцию уязвимой к многократным ударным воздействиям и воздействию угловых ускорений. Храповой механизм, кинематически связанный с якорем и обеспечивающий пошаговый однонаправленный поворот оси перемыкателя контактной системы, также уязвим к указанным воздействиям.
В связи с этим задачей заявляемого изобретения является гарантированное обеспечение сохранения состояния контактной системы исполнительного коммутирующего устройства в условиях широкого спектра аварийных ситуаций, в частности, при многократных ударных воздействиях и воздействии угловых ускорений.
Техническим результатом является повышение безопасности (сохранение состояния контактов) в аварийных ситуациях.
Указанный технический результат обеспечивается тем, что в исполнительном коммутирующем устройстве, содержащем корпус, контактную систему, перемыкатель с токопроводящими секторами, взаимодействующими с расположенными по окружности контактами, электромагнитный привод, ротор и датчик физического параметра, который электрически связан с электромагнитным приводом, согласно изобретению, электромагнитный привод выполнен в виде многополюсного поляризованного реле, ротор выполнен в виде якоря, точечно соединенного через шарнирный механизм с осью, на которой жестко закреплен перемыкатель, а якорь имеет форму диска с выполненными равномерно по всему периметру зубьями, взаимодействующими с зубьями кольцевого выступа корпуса, причем якорь взаимодействует с многополюсным поляризованным реле, каждому полюсу которого соответствует зуб кольцевого выступа корпуса, а механическое взаимодействие одного из зубьев якоря с соответствующим полюсу зубом кольцевого выступа обеспечивает возможность пошагового поворота оси с перемыкателем, при этом зубья равномерно распределены на кольцевом выступе.
Технический результат достигается за счет того, что зубья кольцевого выступа всегда находятся в положении, препятствующем продольному повороту якоря, а следовательно, и перемыкателя контактной системы, обеспечивая сохранение состояния контактной системы.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами.
На фиг.1 представлен осевой разрез коммутирующего исполнительного устройства.
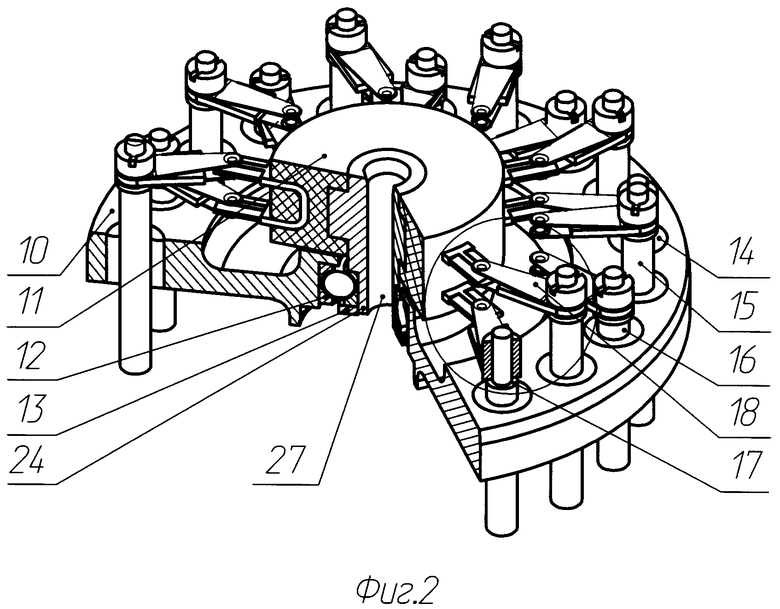
На фиг.2 - конструкция контактной системы.
На фиг.3 - конструкция контактных групп.
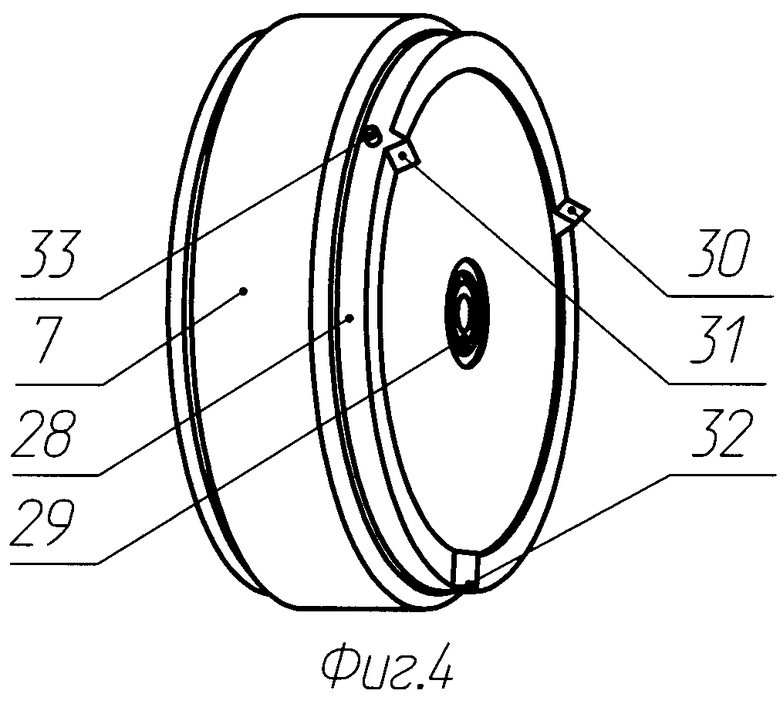
На фиг.4 - конструкция составной части корпуса коммутирующего исполнительного устройства
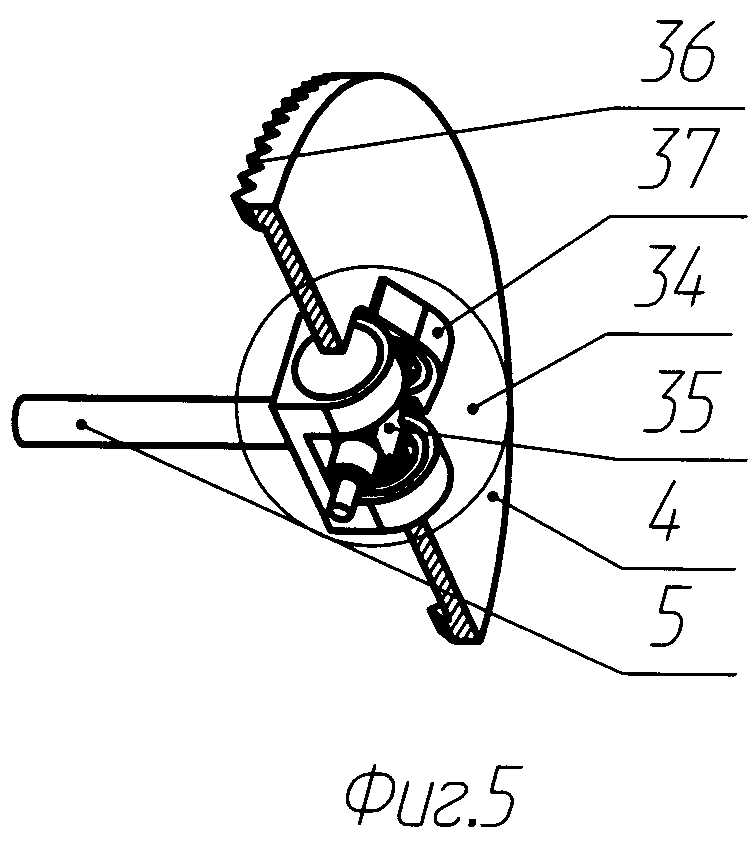
На фиг.5 - конструкция ротора коммутирующего исполнительного устройства.
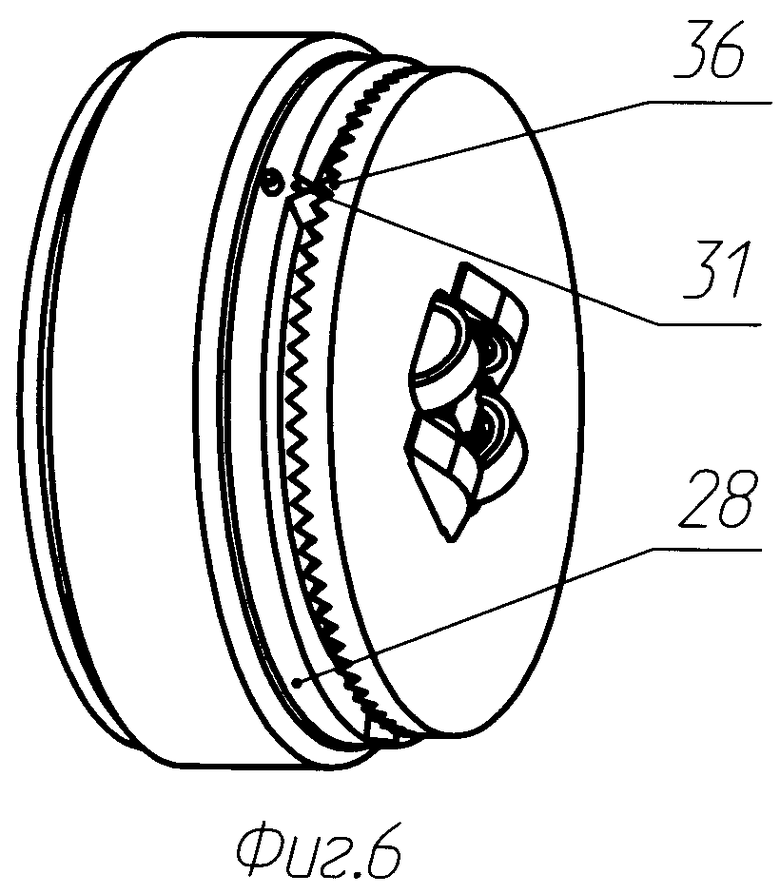
На фиг.6 - конструкция составной части корпуса в сборе с ротором исполнительного коммутирующего устройства.
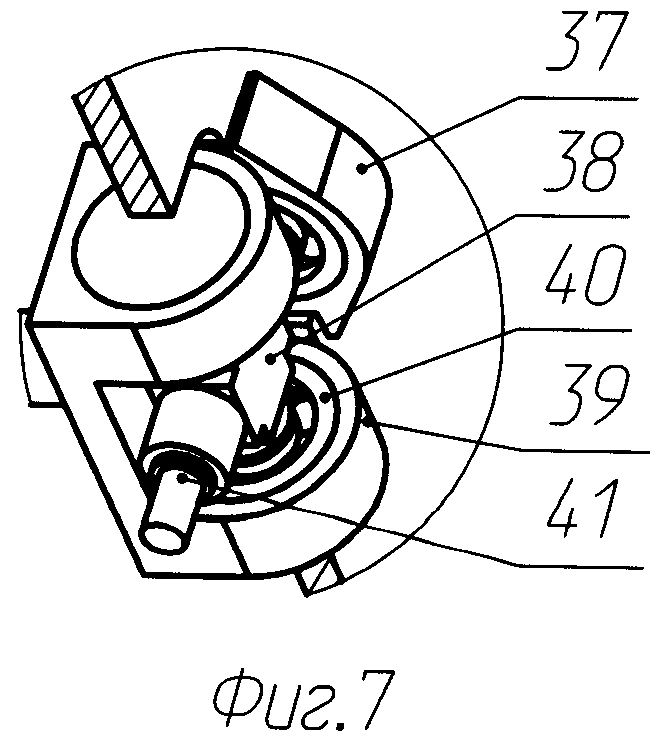
На фиг.7 - конструкция шарнирного механизма.
На фиг.8 - конструкция многополюсного поляризованного реле (вид со стороны распределителя).
На фиг.9 - конструкция многополюсного поляризованного реле (вид со стороны полюсов).
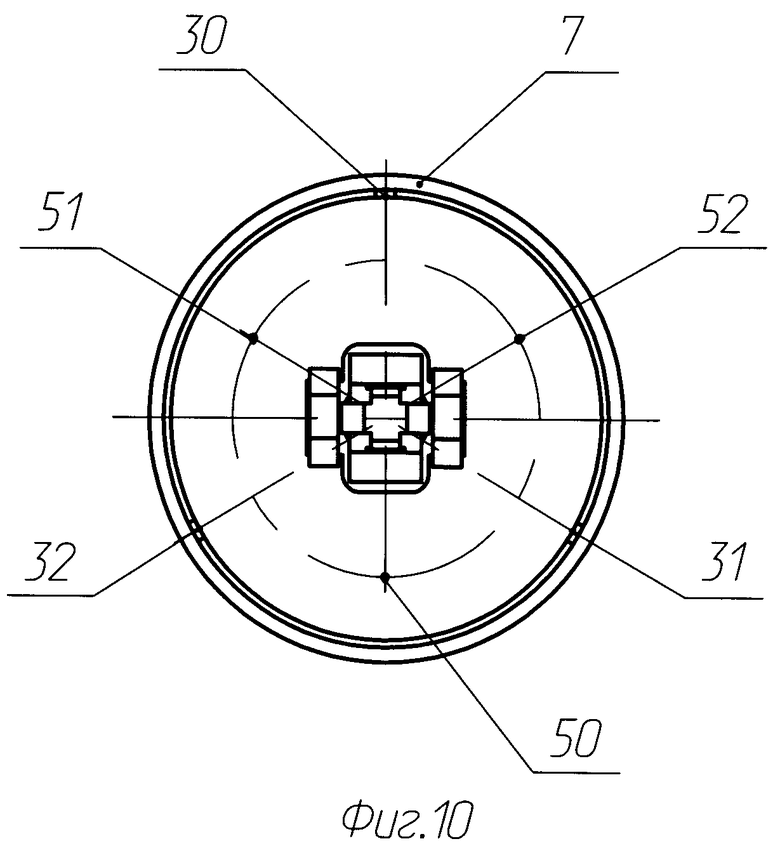
На фиг.10 - угловые положения точек приложения равнодействующей электромагнитных сил.
На фиг.11 - конструкция датчика разности давлений.
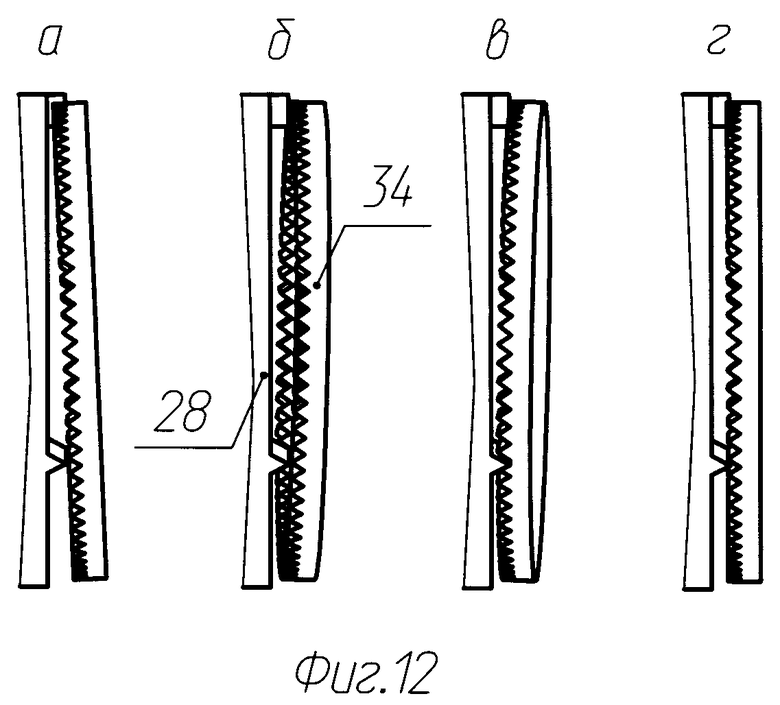
На фиг.12 - положения, принимаемые якорем в ходе сложного вращательного движения.
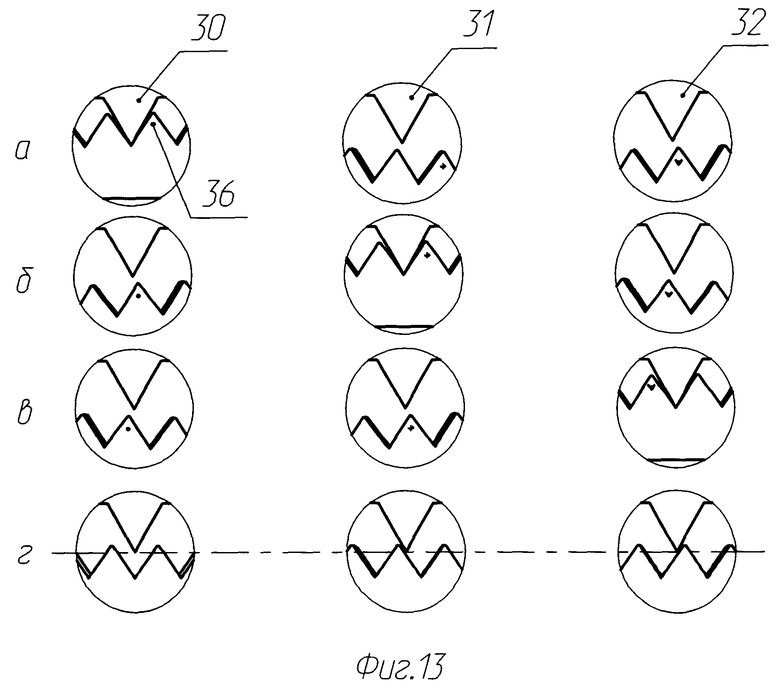
На фиг.13 - схема взаимодействия зубьев якоря и зубьев кольцевого выступа.
На фиг.14 - электрическая схема исполнительного коммутирующего устройства.
Исполнительное коммутирующее устройство (фиг.1) содержит сборный корпус 1, контактную систему 2, электромагнитный привод, который состоит из многополюсного поляризованного реле 3 и ротора 4 с осью 5, и датчик физического параметра 6.
Сборный корпус 1 состоит из частей 7, 8, 9, герметично соединенных между собой с помощью сварки.
Контактная система 2 расположена в части 7 корпуса 1 и состоит из платы 10 и перемыкателя 11, установленного в радиальном шарикоподшипнике 12 платы 10 и жестко закрепленного на оси 5 стопором 13 (фиг.1, 2). В плате 10 выполнены двадцать сквозных отверстий, равномерно расположенных по периметру платы 10 с угловым расстоянием друг от друга 18°. В каждом отверстии через стеклоизоляторы 14, чередуясь, установлены десять токовыводов верхнего уровня 15 и десять токовыводов нижнего уровня 16, причем уступы 17, имеющиеся на токовыводах верхнего уровня 15 и токовыводах нижнего уровня 16, находятся на разной высоте по отношению к поверхности платы 10, на уступе 17 каждого токовывода установлены контактные группы 18.
Контактные группы 18 (фиг.3) состоят из крепежной гайки 19, двух пружин 20 с контактами 21, упора 22, установленного между пружинами 20, и шайбы 23. Причем пружины 20 установлены на токовыводах 15 и 16. Угловое расстояние между контактами 21, расположенными вокруг перемыкателя 11, составляет 36°.
Перемыкатель 11 (фиг.2, 3) состоит из остова 24 и пяти равномерно расположенных по его периметру токопроводящих секторов, выполненных в виде п-образных ножей 25, изолированных от остова 24 и друг от друга прессматериалом 26. Ножи 25 выполнены п-образными для обеспечения их одновременного контакта с контактами 21, расположенными друг над другом и принадлежащим контактным группам 18, установленным, соответственно, на токовыводах верхнего уровня 15 и токовыводах нижнего уровня 16. В центральной части остова 24 выполнено отверстие 27, через которое проходит ось 5 ротора 4.
Часть 7 корпуса 1 (фиг.1, 4) представляет собой полый цилиндр, на одном из торцов которого выполнен кольцевой выступ 28, а другой герметично закрывается платой 10 путем ее установки на торце цилиндра в положении, обеспечивающем их герметичное соединение и размещение контактных групп 18 внутри части 7 корпуса 1. В центре торца с кольцевым выступом 28 установлен радиальный шарикоподшипник 29, а на кольцевом выступе 28 выполнены три зуба 30, 31, 32, расположенные на равном угловом расстоянии друг от друга. Каждый зуб кольцевого выступа 28 выполнен треугольным, а угол при вершине зуба составляет 60°.
На боковой поверхности части корпуса 7 установлен штифт 33, обеспечивающий фиксацию многополюсного поляризованного реле 3 в определенном угловом положении относительно зубьев 30, 31, 32 кольцевого выступа 28.
Через радиальные шарикоподшипники 12 и 29, установленные, соответственно, в плате 10 и торце части 7 с кольцевым выступом 28, проходит ось 5 ротора 4, который выполнен в виде якоря 34 (фиг.1, 5), точечно соединенного через шарнирный механизм 35 с осью 5. Якорь 34 изготовлен в виде диска с выполненными по периметру восьмьюдесятью треугольными зубьями 36 с углом при впадине зуба 70°. В центре якоря 34 расположены башмаки 37, жестко связанные с его поверхностью и предназначенные для соединения с шарнирным механизмом 35.
Зубья 36 якоря 34 находятся в постоянном зацеплении с хотя бы одним из зубьев 30, 31, 32 кольцевого выступа 28 (фиг.6). В нейтральном положении якоря 34 (положении, когда плоская поверхность якоря 34 параллельна торцам части 7) все зубья 30, 31, 32 кольцевого выступа 28 находятся в зацеплении с зубьями 36 якоря 34 с определенным размером зацепления δ1 (фиг.1).
Шарнирный механизм 35 (фиг.7) состоит из крестовины 38, вилки 39, жестко связанной с осью 5, и четырех радиальных шарикоподшипников 40. На выступах 41 крестовины 38 закреплены внутренние кольца четырех радиальных шарикоподшипников 40, наружные кольца двух из них закреплены в отверстиях вилки 39, жестко связанной с осью 5 ротора 4, а наружные кольца двух других закреплены в башмаках 37, жестко связанных с поверхностью якоря 34.
Многополюсное поляризованное реле 3 (фиг.8, 9) состоит из изготовленной в виде полого цилиндра части 8 корпуса 1, постоянного магнита 42, расположенного в центре части 8 корпуса 1, катушек 43, равномерно расположенных по периметру части 8 корпуса 1, и распределителя 44 с контактом 45.
Каждая катушка 43 представляет собой сердечник 46 с обмоткой 47, начало и конец которой объединены, соответственно, с монтажными проводами 48 и 49, причем сердечники 46 пары смежных, электрически объединенных катушек 43 представляют собой полюс многополюсного поляризованного реле 3. Монтажные провода 48 объединены в контакте 45 распределителя 44, а монтажные провода 49 выведены к датчику физического параметра 6. Каждому полюсу многополюсного поляризованного реле 3 соответствует зуб кольцевого выступа 28.
Контактная система 2 и многополюсное поляризованное реле 3 соединяются между собой путем посадки части 8 корпуса 1 на кольцевой выступ 28 части 7 корпуса 1. Причем при посадке часть 8 корпуса 1 устанавливается в фиксированном с помощью штифта 33 угловом положении таким образом, чтобы для каждого углового положения 50, 51, 52 (фиг.10) точек приложения равнодействующей электромагнитных сил, индуцированных в сердечниках 46 соответствующих пар катушек 43 многополюсного поляризованного реле 3, соответствовало угловое положение зубьев 30, 31, 32 кольцевого выступа 28 и являлось диаметрально противоположным.
Датчик физического параметра 6 (фиг.11), например пороговый датчик разности давления, состоит из части 9 корпуса 1, чашки 53, на торце которой расположена мембрана 54 с контактом 55, трех токовыводов 56, предназначенных для электрической связи с монтажными проводами 49, одного токовывода 57, электрически связанного с контактом 55, патрубка 58 для приема динамического давления и отверстия 59 для приема статического давления. На торцевой поверхности части 9 корпуса 1 выполнен кольцевой выступ 60, наружный диаметр которого соответствует внутреннему диаметру части 8 корпуса 1 многополюсного поляризованного реле 3.
При посадке части 8 корпуса 1 на кольцевой выступ 60 части 9 корпуса 1 за счет высоты кольцевого выступа 60 обеспечивается определенный зазор 62 (фиг.1) между контактом 45 распределителя 44 и контактом 55 мембраны 54 порогового датчика разности давления 6.
Описание работы исполнительного коммутирующего устройства.
В исходном состоянии якорь 34 находится в положении а относительно кольцевого выступа 28 (фиг.12, 13), при котором зуб 30 кольцевого выступа 28 находится в зацеплении с зубьями 36 якоря 34. При этом контакты 45 и 55, соответственно, распределителя 44 и мембраны 54 разомкнуты.
При превышении разности давления между патрубком 58 приема динамического давления и отверстием 59 приема статического датчика физического параметра 6 порогового значения контакты 45 и 55 замыкаются, тем самым давая возможность подачи напряжения на электрические цепи многополюсного поляризованного реле 3.
Подача импульса напряжения на электрическую цепь многополюсного поляризованного реле 3 (фиг.14), определяемую одним из токовыводов 56 и токовыводом 57, приводит к тому, что равнодействующая электромагнитных сил, индуцированных в сердечниках 46 соответствующей пары катушек 43, действует на якорь 34 в угловом положении, диаметрально противоположном зубу 31 кольцевого выступа 28. Вследствие этого в закрепленном через шарнирный механизм 35 якоре 34 возникает крутящий момент, вызывающий поворот якоря 34. При этом одна сторона якоря 34 приближается к точке равнодействующей электромагнитных сил, индуцированных в сердечниках 46 соответствующей пары катушек 43, а другая, диаметрально противоположная сторона якоря 34, приближается к положению зуба 31 кольцевого выступа 28. В процессе этого движения выходит из зацепления зуб 30 кольцевого выступа 28, тем самым обеспечивая возможность поворота якоря 34 вокруг продольной оси, и одновременно происходит взаимодействие поверхностей зуба 31 кольцевого выступа 28 и одного из зубьев 36 якоря 34 таким образом, что возникает крутящий момент, вызывающий поворот якоря 34 вокруг продольной оси. Этот момент через шарнирный механизм 35 и ось 5 передается на перемыкатель 11, что ведет к его повороту. Когда вершина зуба 31 кольцевого выступа 28 полностью оказывается во впадине между зубьями 36 якоря 34 в положении 6, крутящий момент вокруг продольной оси якоря 34 становится равным нулю, и поворот перемыкателя 11 на единичный угол 1,5° заканчивается.
Дальнейшая последовательная подача импульсов напряжения через другие электрические цепи многополюсного поляризованного реле 3, определяемыми токовыводами 56 и токовыводом 57, приводит к воздействию электромагнитных сил на якорь 34 в точках 52, 50, 51, 52 и т.д. (фиг.10) и ведет к той же логике работы - переходу якоря 34 в положения в, а, б, в и т.д. (фиг.12, 13). В результате чего будет происходить пошаговый поворот оси 5 с перемыкателем 11, включающий в себя совокупность двадцати четырех шагов на единичный угол, что в конечном итоге приведет к заданному угловому перемещению перемыкателя 11 на 36° и, соответственно, к коммутации рабочих электрических цепей, то есть к срабатыванию исполнительного коммутирующего устройства.
Для приведения исполнительного коммутирующего устройства в исходное состояние необходима прямая (положения а, б, в, а и т.д.) или обратная (а, в, б, а и т.д.) подача импульсов напряжения на электрические цепи многополюсного поляризованного реле 3, определяемыми токовыводами 56 и токовыводом 57, при наличии разности давления в патрубке 58 для приема динамического давления и отверстии 59 для приема статического давления, равной пороговому значению или превышающей его. Таким образом, смена состояний контактной системы 2 обеспечивается при повороте перемыкателя 11 в любом направлении на угол, определяемый угловым положением контактов 21 и ножей 25 перемыкателя 11, и может осуществляться дистанционно без ручных операций.
Изменения состояния контактной системы 2 вследствие действия крутящего момента, вызванного многократными ударными воздействиями или воздействием угловых ускорений на подвижные элементы исполнительного коммутирующего устройства 3, не произойдет благодаря тому, что зубья 30, 31, 32 кольцевого выступа 28 (фиг.10) всегда находятся в зацеплении с зубьями 36 якоря 34, т.е. в положении, препятствующем продольному повороту якоря 34, а следовательно, и перемыкателя 11 контактной системы 2 более чем на единичный угол (в том числе и в нейтральном положении г).
Изменения состояния контактной системы вследствие разрушения контактной системы 2 и связанного с ней ротора 4 при воздействии критических физических факторов не произойдет благодаря исполнению их в ударостойком и термостойком исполнении, а также расположению их в герметичном корпусе (при этом не требуется высокая стойкость к критическим физическим факторам составных частей конструкции, например, многополюсного поляризованного реле 3, датчика физического параметра 6).
Изменения состояния контактной системы 2 при случайном появлении напряжения в электрических цепях многополюсного поляризованного реле 3 в условиях аварийных ситуаций не произойдет благодаря выбранной логике работы исполнительного коммутирующего устройства. Случайное появление напряжения в одной электрической цепи многополюсного поляризованного реле 3 может вызвать поворот перемыкателя 11 только на единичный угол, что недостаточно для полного переключения контактной системы 2.
Таким образом, заявляемое техническое решение позволит создать исполнительное коммутирующее устройство, сохраняющее состояние контактов в аварийных ситуациях и работоспособное в широких областях применения с датчиками различных физических параметров (абсолютного давления, разности давления, линейного и углового ускорений, угловой скорости, температуры). При этом пороговые датчики физических параметров могут обладать предельно упрощенной конструкцией.
Заявляемое исполнительное коммутирующее устройство с пороговым датчиком разности давления может быть реализовано массой в 150 г и в габаритах ⌀35×45 мм (без учета мест крепления, токовыводов и патрубков), поэтому можно сделать вывод о соответствии заявляемого изобретения условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2019 |
|
RU2707879C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2617708C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2367050C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2421842C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2435244C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОЛЯРИЗОВАННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2015 |
|
RU2604205C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОЛЯРИЗОВАННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2015 |
|
RU2599625C1 |
| КОНТАКТНАЯ СИСТЕМА | 2018 |
|
RU2691740C1 |
| КОНТАКТНАЯ СИСТЕМА | 2018 |
|
RU2685543C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2013 |
|
RU2562057C2 |





Изобретение относится к исполнительным коммутирующим устройствам датчиков требуемого физического параметра систем автоматики взрывоопасных технических объектов, которые могут подвергаться аварийным воздействиям. Устройство содержит корпус, контактную систему, перемыкатель с токопроводящими секторами, взаимодействующими с расположенными по окружности контактами, электромагнитный привод в виде многополюсного поляризованного реле, ротор в виде якоря и датчик физического параметра, электрически связанный с электромагнитным приводом. Якорь точечно соединен через шарнирный механизм с осью, на которой жестко закреплен перемыкатель. Якорь имеет форму диска с выполненными равномерно по всему периметру зубьями, взаимодействующими с зубьями кольцевого выступа корпуса. Якорь взаимодействует с многополюсным поляризованным реле. Каждому полюсу реле соответствует зуб кольцевого выступа корпуса. Зубья на кольцевом выступе распределены равномерно. Механическое взаимодействие одного из зубьев якоря с соответствующим полюсу зубом кольцевого выступа обеспечивает возможность пошагового поворота оси с перемыкателем. Технический результат - гарантированное сохранение состояния контактов контактной системы исполнительного коммутирующего устройства при многократных ударных воздействиях и воздействии угловых ускорений. 14 ил.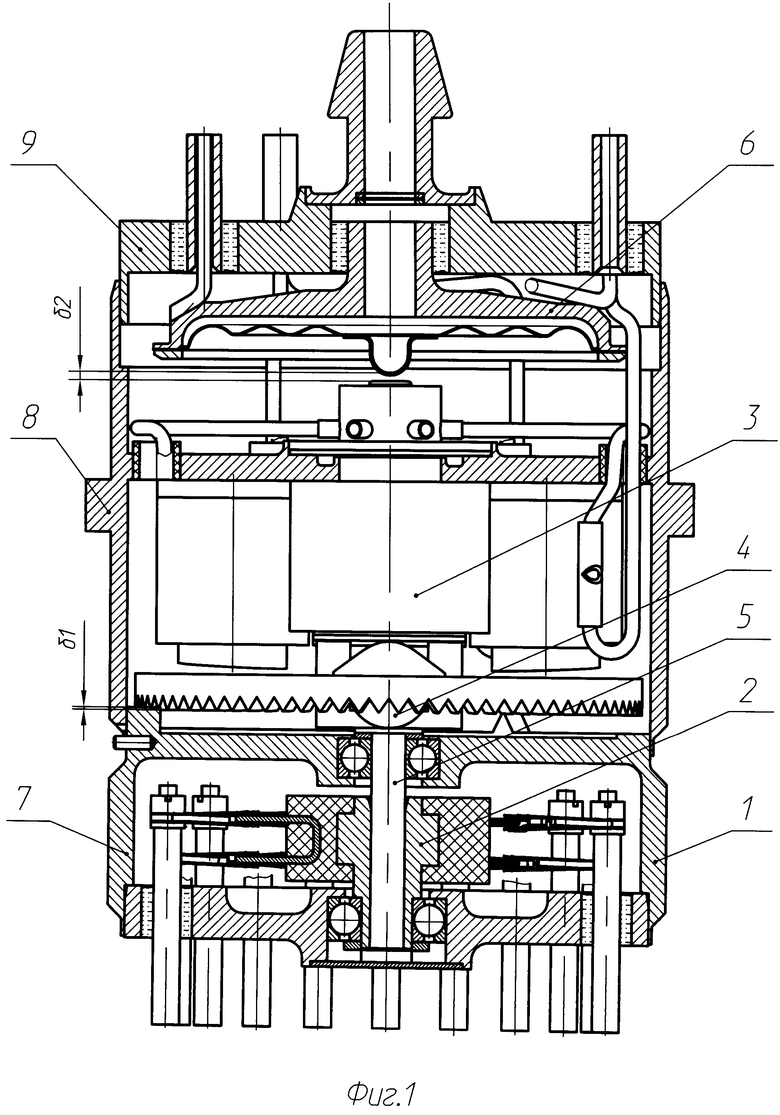
Исполнительное коммутирующее устройство, содержащее корпус, контактную систему, перемыкатель с токопроводящими секторами, взаимодействующими с расположенными по окружности контактами, электромагнитный привод, ротор и датчик физического параметра, который электрически связан с электромагнитным приводом, отличающееся тем, что электромагнитный привод выполнен в виде многополюсного поляризованного реле, ротор выполнен в виде якоря, точечно соединенного через шарнирный механизм с осью, на которой жестко закреплен перемыкатель, а якорь имеет форму диска с выполненными равномерно по всему периметру зубьями, взаимодействующими с зубьями кольцевого выступа корпуса, причем якорь взаимодействует с многополюсным поляризованным реле, каждому полюсу которого соответствует зуб кольцевого выступа корпуса, а механическое взаимодействие одного из зубьев якоря с соответствующим полюсу зубом кольцевого выступа обеспечивает возможность пошагового поворота оси с перемыкателем, при этом зубья равномерно распределены на кольцевом выступе.
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2367050C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2421842C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2435244C1 |
| DE 4133070 C1, 25.02.1993 | |||
| DE 4411036 A1, 02.03.1995. | |||

