Изобретение относится к исполнительным коммутирующим устройствам пороговых датчиков физического параметра систем автоматики технических объектов, которые могут подвергаться аварийным воздействиям. Техническим результатом является повышение безопасности (сохранение состояния контактов) в аварийных ситуациях.
В настоящее время известны различные конструкции исполнительных коммутирующих устройств систем автоматики взрывоопасных технических объектов, однако они, обладая определенными недостатками, зачастую не могут обеспечить гарантированную взрывобезопасность указанных объектов в аварийных ситуациях.
Известно исполнительное коммутирующее устройство - пороговое реле разности давлений, содержащее размещенный в корпусе пороговый чувствительный элемент разности давлений, взаимодействующий через герметичную стенку посредством магнитной системы с контактной системой, блокируемой в исходном и сработанном состояниях электромагнитным реле, на корпусе исполнительного коммутирующего устройства размещены токовыводы [патент РФ №2254561 C1, G01L 19/12, опубл. 20.06.2005].
В этом исполнительном коммутирующем устройстве защита от переключения при ударных воздействиях большой интенсивности обеспечивается тонкой балансировкой деталей и сборочных единиц, что весьма трудоемко и не всегда эффективно. При этом для обеспечения высокой ударостойкости требуется тонкая балансировка всех без исключения подвижных деталей и сборочных единиц.
Известно исполнительное коммутирующее устройство - моторное реле времени ВС-10 [Дружинин Г.В. Реле времени (Библиотека по автоматике, вып. 200), М.-Л., Энергия, 1966, стр.67, рис. 34], предназначенное для коммутации электрических цепей.
Реле содержит корпус, основную и дополнительную контактные системы, кулачки и электромагнитный привод.
При подаче электропитания через контакты дополнительной контактной системы вращение от привода через редуктор и шестерню передается на ось с установленными дисками, на которых размещены упоры, взаимодействующие с кулачками переключения контактов контактных систем.
Конструктивное исполнение контактов реле не обеспечивает их стойкость при ударных воздействиях большой интенсивности.
Это исполнительное коммутирующее устройство рассматривается в качестве прототипа.
Анализ конструкций известных исполнительных коммутирующих устройств позволяет сделать вывод, что известный уровень техники не обеспечивает создания безопасного исполнительного коммутирующего устройства, сохраняющего состояние контактов в аварийных ситуациях.
Поэтому задача, решаемая изобретением, - гарантированное обеспечение сохранения состояния контактной системы исполнительного контактного устройства в аварийных ситуациях.
Сущность изобретения заключается в том, что в исполнительном коммутирующем устройстве, содержащем корпус, основную и дополнительную контактные системы, кулачок и электромагнитный привод, согласно изобретению основная контактная система содержит перемыкатель с токопроводящими секторами, установленный на одной оси с кулачком с возможностью взаимодействия с контактами основной контактной системы, расположенными по окружности, а кулачок взаимодействует с контактами дополнительной контактной системы, при этом электромагнитный привод выполнен в виде поляризованного реле с возвратно-поворотным движением якоря и кинематически связанного с ним храпового механизма с возможностью пошагового однонаправленного поворота оси, на которой жестко закреплены перемыкатель и кулачок.
Кроме того, с целью обеспечения сохранения исходного состояния контактов основной контактной системы в течение большей части времени, необходимого для переключения устройства, токопроводящие секторы перемыкателя выполнены с угловой шириной, близкой к полуокружности.
Выполнение основной контактной системы с перемыкателем с токопроводящими секторами, установленным на одной оси с кулачком с возможностью взаимодействия с контактами основной контактной системы, расположенными по окружности, и взаимодействие кулачка с контактами дополнительной контактной системы, при выполнении электромагнитного привода в виде поляризованного реле с возвратно-поворотным движением якоря и кинематически связанного с ним храпового механизма с возможностью пошагового однонаправленного поворота оси, на которой жестко закреплены перемыкатель и кулачок, позволяет повысить стойкость устройства к ударным воздействиям большой интенсивности. При ударном воздействии якорь привода может совершить один цикл движений, то есть перемыкатель повернется всего лишь на один шаг, которого недостаточно для изменения состояния контактной системы. Возможность многократных ударных воздействий большой интенсивности практически маловероятна.
Расположение контактов основной контактной системы по окружности вокруг перемыкателя с токопроводящими секторами и конструкция электромагнитного привода обеспечивает переключение устройства из исходного состояния в сработанное и обратно при однонаправленном повороте перемыкателя и кулачка, что значительно упрощает конструкцию устройства и также позволяет выполнить ее компактной.
Выполнение токопроводящих секторов перемыкателя с угловой шириной, близкой к полуокружности, обеспечит сохранение исходного состояния контактов основной контактной системы в течение большей части времени, необходимого для переключения устройства.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами.
На фиг.1 представлен осевой разрез устройства (разрез А-А по фиг.3).
На фиг.2 - конструкция основной контактной системы.
На фиг.3 - конструкция дополнительной контактной системы.
На фиг.4 - конструкция храпового механизма.
На фиг.5 - конструкция электромагнитного привода.
На фиг.6 - электрические связи и взаимодействие составных элементов устройства.
Исполнительное коммутирующее устройство содержит герметичный корпус 1 с токовыводами 2-4, в котором размещены основная контактная система 5 с контактами 6 и поворотным перемыкателем 7, дополнительная контактная система 8 с неподвижными контактами 9, подвижными контактами 10, управляемыми кулачком 11, шаговый электромагнитный привод 12, выполненный в виде поляризованного реле с возвратно-поворотным движением якоря 13, взаимодействующего с основной и дополнительной контактной системой через храповой механизм 14. Храповой механизм 14 состоит из храпового колеса 15 и взаимодействующих с ним подвижных пружинных собачек 16, расположенных на коромысле 17, и неподвижных пружинных собачек 18, расположенных на крышке 19. Храповой механизм 14 преобразует возвратно-поворотное движение якоря 13 в однонаправленное вращение оси 20, на которой жестко закреплены перемыкатель 7 и кулачок 11 (фиг.1-4). Храповое колесо 15 установлено на оси 20 неподвижно, а коромысло 17 - свободно с возможностью поворота.
Якорь 13 поворачивает коромысло 17 выступами 21, входящими в отверстия 22 коромысла 17 (фиг.4), которое расположенными на нем собачками 16 поворачивает храповое колесо 15. Угол поворота t якоря 13 превышает шаг зубьев храпового колеса 15 с учетом возможных угловых люфтов от зазоров выступов 21 в отверстиях 22. Неподвижные собачки 18 обеспечивают однонаправленный поворот храпового колеса 15.
Электромагнитный привод 12 (фиг.5) выполнен по схеме поляризованного двухпозиционного электромагнитного реле с двумя устойчивыми состояниями якоря 13.
В корпусе 1 также расположен пороговый датчик требуемого физического параметра 23, например абсолютного давления, состоящий из двух мембран 24 с контактными выступами 25, припаянных к кольцу 26, выполненному из токонепроводящего материала, например керамики. Мембраны 24 с кольцом 26 образуют герметичную полость (анероидную коробку) с некоторым малым давлением Ро. Измеряемое давление Р подается через отверстие 27. Датчик абсолютного давления изображен на фиг.1 с разомкнутыми контактами 25 (между ними имеется зазор «а»), то есть измеряемое давление Р не превышает уставочного значения. Мембраны 24 электрически соединены с соответствующими токовыводами 28 и 29 (фиг.1).
Устройство работает следующим образом.
Для срабатывания (переключения контактов основной контактной системы 5) исполнительного коммутирующего устройства необходима поочередная подача на последовательно соединенные обмотки 30 (выводы «в-г») и на последовательно соединенные обмотки 31 (выводы «б-г») шагового электромагнитного привода 12 некоторого количества импульсов напряжения через замкнутые контакты 25 порогового датчика физического параметра 23 при его срабатывании при превышении давлением уставочного (порогового) значения (фиг.5). При подаче каждого очередного импульса напряжения якорь 13 поворачивается на угол t из одного крайнего положения в другое, поворачивая через коромысло 17 и собачки 16 храповое колесо 15 на угол, равный шагу его зубьев, и возвращаясь без поворота храпового колеса для повторения цикла. При возврате якоря 13 храповое колесо 15 удерживается от возврата собачками 18.
Схема, поясняющая электрические связи и взаимодействие составных элементов (порогового датчика физического параметра 23, основной 5 и дополнительной 8 контактной системы, шагового электромагнитного привода 12, храпового механизма 14) исполнительного коммутирующего устройства, приведена на фиг.6. Коммутация электрических цепей приведена для исходного состояния устройства.
По одному из выводов обмоток 30 и 31 соединено в общий вывод «г», с которым, в свою очередь, соединена электрическая цепь датчика физического параметра 23. Данное соединение обеспечивает разрыв двух цепей подачи импульсов напряжения (на обмотки 30 и на обмотки 31) одним контактом датчика физического параметра.
Переключение контактов основной контактной системы 5 исполнительного коммутирующего устройства возможно при наличии нескольких факторов: давления Р, равного или превышающего уставку, и импульсов напряжения, подаваемых поочередно на выводы «в-г» и «б-г». При этом для обеспечения поворота оси 20, на которой установлены перемыкатель 7 и кулачок 11, на строго определенный угол, необходимый для переключения контактов основной контактной системы, в электрическую цепь подачи импульсов напряжения также включены контакты дополнительной контактной системы 8. При подаче импульсов напряжения якорь 13 совершает возвратно-поворотное движение, преобразуемое храповым механизмом 14 во вращательное движение оси 20, при ее повороте на 90° контакты дополнительной контактной системы 8 размыкаются, разрывая цепь питания обмоток 30 и 31 шагового электромагнитного привода 12.
Для приведения исполнительного коммутирующего устройства в исходное состояние необходима поочередная подача на последовательно соединенные обмотки 30 (выводы «в-г») и на последовательно соединенные обмотки 31 (выводы «б-г») шагового электромагнитного привода некоторого количества импульсов напряжения через другие замкнувшиеся при срабатывании контакты дополнительной контактной системы 8. Аналогично при повороте оси 20 на 90° контакты дополнительной контактной системы 8 размыкаются, разрывая цепь питания обмоток 30, 31 шагового электромагнитного привода 12. То есть приведение исполнительного коммутирующего устройства в исходное состояние может осуществляться дистанционно без ручных операции и необходимости доступа к нему.
Таким образом, смена состояний основной 5 и дополнительной 8 контактной системы, а следовательно, и смена состояний исполнительного коммутирующего устройства, обеспечиваются при однонаправленном повороте храпового колеса 15 (оси 20 с перемыкателем 7 и кулачком 11) на каждые 90°.
Подача импульсов напряжения на обмотки 30, 31 шагового электромагнитного привода 12 через контакты дополнительной контактной системы 8 не требует подачи строго определенного количества импульсов для срабатывания и взведения исполнительного коммутирующего устройства, соответственно, то есть обеспечивает его надежную работу при возможных сбоях в работе шагового электромагнитного привода 12 и дребезге контактов контактной системы порогового датчика давления 23.
Организация необходимых электрических цепей контактов датчика давления 23, обмоток 30, 31 шагового электромагнитного привода 12 и дополнительной контактной системы 8 в качестве контактов самоотключения обеспечивается соединением токовыводов 3, 4, 28, 29 на корпусе 1 и во внутренней полости корпуса. Монтажные провода на иллюстрациях не показаны.
Для уменьшения момента поворота ось 20 установлена на шарикоподшипниках 32.
При эксплуатации при случайном появлении напряжения в электрических цепях и в аварийных ситуациях (ударные воздействия при падении или столкновении, тепловые воздействия при пожаре, затопление, комбинации этих воздействий) основная контактная система 5 не переключится, обеспечив безопасность всей системы автоматики взрывоопасного технического объекта. При этом не требуется высокая стойкость к аварийным воздействиям всех составных частей исполнительного коммутирующего устройства. Основная контактная система 5, выполненная в ударостойком и термостойком исполнении и расположенная в герметичном корпусе, определяет и обеспечивает необходимую стойкость к аварийным воздействиям. Конструкция шагового электромагнитного привода 12 даже при повороте якоря 13, например, от ударного воздействия не приводит к смене состояния основной контактной системы 5, так как возможный поворот якоря 13 приведет к повороту оси 20 и перемыкателя 7 всего на один шаг, тогда как для ее переключения требуется значительно большее количество шагов. Перемыкающие элементы 33 перемыкателя 7, выполненные в виде секторов с угловой шириной, близкой к полуокружности, обеспечивают сохранение исходного состояния контактов основной контактной системы 5 большую часть времени, необходимого для переключения устройства.
Кроме того, пространственное разнесение контактов 6 основной контактной системы (расположенными по окружности через 90° - фиг.2) исключает их случайную коммутацию даже разрушенными элементами конструкции при ударных воздействиях большой интенсивности.
Таким образом, заявляемое техническое решение позволит создать исполнительное коммутирующее устройство, сохраняющее состояние контактов (безопасное) в аварийных ситуациях и работоспособное (надежное) в широких областях применения с пороговыми датчиками различных физических параметров (абсолютного и избыточного давления, линейного и углового ускорений, угловой скорости, температуры).
При этом пороговые датчики физических параметров могут быть с предельно упрощенной конструкцией.
Заявляемое исполнительное коммутирующее устройство с пороговым датчиком абсолютного давления может быть реализовано массой в 100 г и объемом не более 50 см3.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2421842C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2435244C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2496177C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2617708C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2019 |
|
RU2707879C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОЛЯРИЗОВАННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2015 |
|
RU2604205C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2013 |
|
RU2562057C2 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2013 |
|
RU2542336C2 |
| КОНТАКТНАЯ СИСТЕМА | 2018 |
|
RU2685543C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОЛЯРИЗОВАННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2013 |
|
RU2552524C2 |
Изобретение относится к исполнительным коммутирующим устройствам пороговых датчиков физических параметров для систем автоматики взрывоопасных технических объектов, которые могут подвергаться аварийным воздействиям. Техническим результатом является повышение безопасности, а именно сохранение состояния контактов в аварийных ситуациях. Технический результат достигается за счет того, что в исполнительном коммутирующем устройстве, содержащем корпус, основную и дополнительную контактные системы, кулачок и электромагнитный привод, основная контактная система содержит перемыкатель с токопроводящими секторами. Перемыкатель установлен на одной оси с кулачком с возможностью взаимодействия с контактами основной контактной системы, расположенными по окружности, а кулачок взаимодействует с контактами дополнительной контактной системы. Электромагнитный привод выполнен в виде поляризованного реле с возвратно-поворотным движением якоря и кинематически связанного с ним храпового механизма с возможностью пошагового однонаправленного поворота оси, на которой жестко закреплены перемыкатель и кулачок. 1 з.п. ф-лы, 6 ил.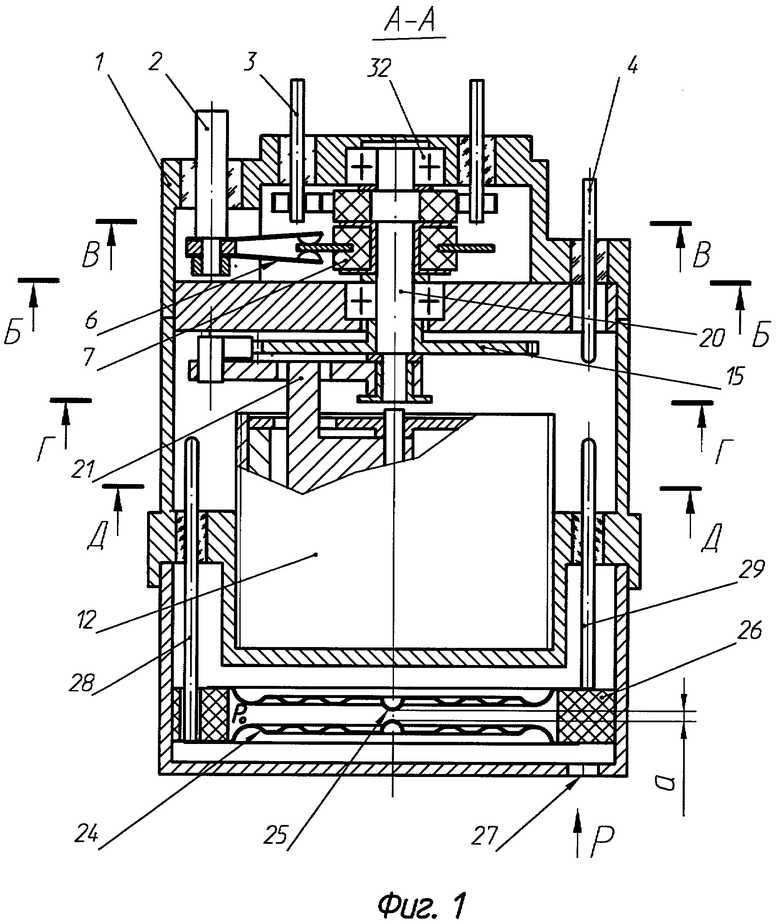
1. Исполнительное коммутирующее устройство, содержащее корпус, основную и дополнительную контактные системы, кулачок и электромагнитный привод, отличающееся тем, что основная контактная система содержит перемыкатель с токопроводящими секторами, установленный на одной оси с кулачком с возможностью взаимодействия с контактами основной контактной системы, расположенными по окружности, а кулачок взаимодействует с контактами дополнительной контактной системы, при этом электромагнитный привод выполнен в виде поляризованного реле с возвратно-поворотным движением якоря и кинематически связанного с ним храпового механизма с возможностью пошагового однонаправленного поворота оси, на которой жестко закреплены перемыкатель и кулачок.
2. Исполнительное коммутирующее устройство по п.1, отличающееся тем, что токопроводящие секторы перемыкателя выполнены с угловой шириной, близкой к полуокружности.
| ДРУЖИНИН Г.В | |||
| Реле времени | |||
| Библиотека по автоматике, вып.200 | |||
| М.-Л.: Энергия, 1966, с.67, рис.34. | |||
| РЕЛЕ РАЗНОСТИ ДАВЛЕНИЙ | 2003 |
|
RU2254561C1 |
| Ножной точильный, шлифовальный или полировальный станок | 1918 |
|
SU6274A1 |
| Автоматизированный электропривод с механическим аккумулятором | 1987 |
|
SU1550254A1 |
| Реле для контрольной лампы | 1930 |
|
SU30358A1 |
| US 2997560 A, 22.08.1961 | |||
| DE 4411036 A1, 02.03.1995 | |||
| DE 4133070 C1, 25.02.1993. | |||

