Техническое решение относится к машиностроению, в частности, к машинам ударного действия, и может быть использовано в сейсморазведке, строительстве и горном деле.
Известен пневматический подъемник по а.с. СССР №829533, В66В 9/04, БИ. №18, опубл. 15.05.81, содержащий две трубчатые стойки, расположенные параллельно друг другу на опорном основании и имеющие продольные прорези, снабженные уплотнениями, грузонесущий элемент, размещенный в прорезях стоек и выполненный в виде траверсы, связанной с кабиной, а также привод перемещения траверсы в виде основного поршня, установленного с возможностью перемещения внутри каждой трубчатой стойки, причем полости стоек сообщены с трубопроводами подачи сжатого воздуха. Пневматический подъемник снабжен дополнительным поршнем, расположенным в каждой стойке, штоком, соединяющим между собой соответствующие основной и дополнительный поршни, и роликами, смонтированными на штоке между поршнями и опирающимися на стенки стойки, при этом на концах траверсы выполнены отверстия, через каждое из которых пропущено указанное уплотнение, контактирующее с упомянутыми роликами.
Недостатком данного пневматического подъемника является низкая эффективность работы, т.к. его энергия зависит от диаметра трубчатых стоек, а высота подъема за один цикл работы грузонесущего элемента - от их длины, что ограничивает высоту подъема и вес поднимаемого груза (кабины).
Наиболее близким по технической сущности и совокупности существенных признаков является пневматический подъемник по патенту РФ №2055803, В66В 9/04, опубл. 10.03.1996, содержащий установленный вертикально трубчатый корпус, в котором размещено подъемное средство с уплотнением, взаимодействующее с грузонесущим элементом, и систему подачи рабочего агента, сообщенную с полостью корпуса. Подъемное средство снабжено штоком с замком одностороннего хода для грузонесущего элемента, проходящим через отверстия, выполненные в днищах корпуса, при этом подъемное средство представляет собой эластичную мембрану в виде рукава, один конец которого закреплен по периметру корпуса, а другой замкнут на замке, эластичная мембрана делит корпус на две камеры, каждая из которых сообщена с системой подачи рабочего агента.
Недостатками данного пневматического подъемника является низкая эффективность работы в связи с ограничением его подъемной силы и высоты подъема параметрами трубчатого корпуса. Сложная система подачи и отвода рабочего агента и сложность конструкции пневматического подъемника, т.к. он имеет две герметические камеры управления и клапаны удаления рабочего агента, приводят к снижению надежности его работы.
Технические задачи - повышение эффективности работы пневматического подъемника за счет увеличения энергетических показателей без изменения геометрических параметров трубчатого корпуса и повышение надежности работы за счет упрощения системы подачи и отвода рабочего агента и конструкции в целом при снижении стоимости подъемника.
Поставленные задачи решаются тем, что пневматический подъемник (далее - подъемник), содержащий установленный вертикально трубчатый корпус, в котором размещено подъемное средство, представляющее собой эластичную мембрану в виде рукава, один конец которого закреплен по периметру трубчатого корпуса, а другой - на замке, взаимодействующем через шток с поднимаемым элементом, и систему подачи и отвода рабочего агента в трубчатый корпус, согласно техническому решению снабжен диском-фиксатором, оснащенным магнитом, при этом рукав, выполненный большего диаметра, чем диаметр трубчатого корпуса, установлен с возможностью нахождения вне и внутри трубчатого корпуса, а поднимаемый элемент выполнен в виде ударника с кольцевой камерой отрыва, взаимодействующего с диском-фиксатором, жестко закрепленным в нижней части штока и имеющим каналы, которыми кольцевая камера отрыва ударника соединена с рабочей камерой, расположенной между рукавом и диском-фиксатором. Система подачи и отвода рабочего агента выполнена в виде распределителя, соединенного с источником рабочего агента, указанной рабочей камерой и атмосферой, а камера под ударником постоянно соединена с атмосферой.
Рукав, выполненный большего диаметра, чем диаметр трубчатого корпуса, и установленный с возможностью нахождения вне и внутри трубчатого корпуса, позволяет значительно расширить энергетические возможности подъемника, не изменяя геометрических параметров трубчатого корпуса: за счет увеличения рабочей площади рукава повышается подъемная сила подъемника. Повышение энергетических показателей подъемника без изменения геометрических параметров трубчатого корпуса повышает эффективность его работы.
Диск-фиксатор с помощью магнита обеспечивает надежное сцепление подъемного средства с поднимаемым элементом в процессе его подъема. Камера отрыва и каналы диска-фиксатора, которыми камера отрыва ударника соединена с рабочей камерой, позволяют при определенном давлении в рабочей камере легко отделить диск-фиксатор от ударника и обеспечить ускорение ударнику, что повышает эффективность и надежность работы подъемника.
По сравнению со сложной системой подачи и отвода рабочего агента прототипа простой распределитель (например, трехходовой кран) и наличие канала в камере трубчатого корпуса под ударником, постоянно соединяющего камеру под ударником с атмосферой (т.е. герметизируют не две как в прототипе, а одну - рабочую камеру), позволяют упростить конструкцию подъемника в целом, тем самым повысить надежность его работы при снижении стоимости подъемника.
Целесообразно, чтобы камера отрыва ударника была выполнена с регулируемой площадью отрыва. В этом случае ударник можно будет отрывать от диска-фиксатора при различных усилиях. Изменяя площадь камеры отрыва, например, установленными в камере отрыва ударника кольцами, можно регулировать усилие отрыва, а следовательно, повысить эффективность работы подъемника.
Целесообразно, чтобы магнит диска-фиксатора был снабжен диамагнитными пластинами для регулировки силы его притяжения. Это позволит изменять силу притяжения магнита и регулировать усилие отрыва ударника от диска-фиксатора, что повысит эффективность работы подъемника.
Целесообразно, чтобы подъемник был снабжен блоком управления, соединенным с распределителем рабочего агента и источником рабочего агента системы подачи и отвода рабочего агента и с контактным датчиком, расположенным на рабочем инструменте. Это позволит автоматизировать процесс подъема ударника и его отрыв от диска-фиксатора с заданным усилием, повысив эффективность работы подъемника.
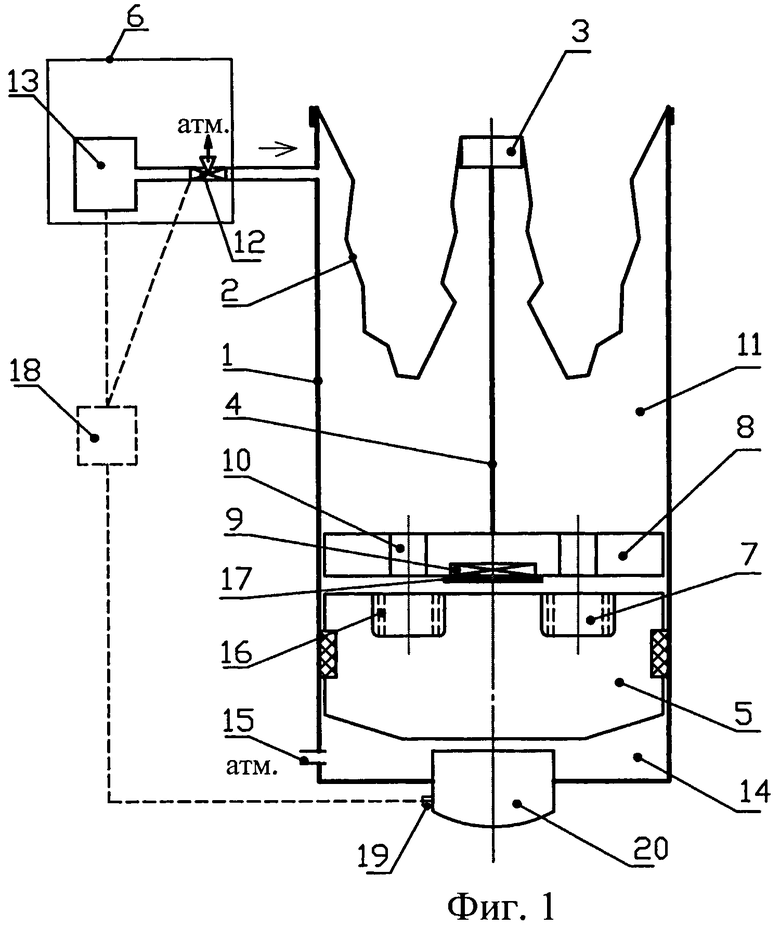
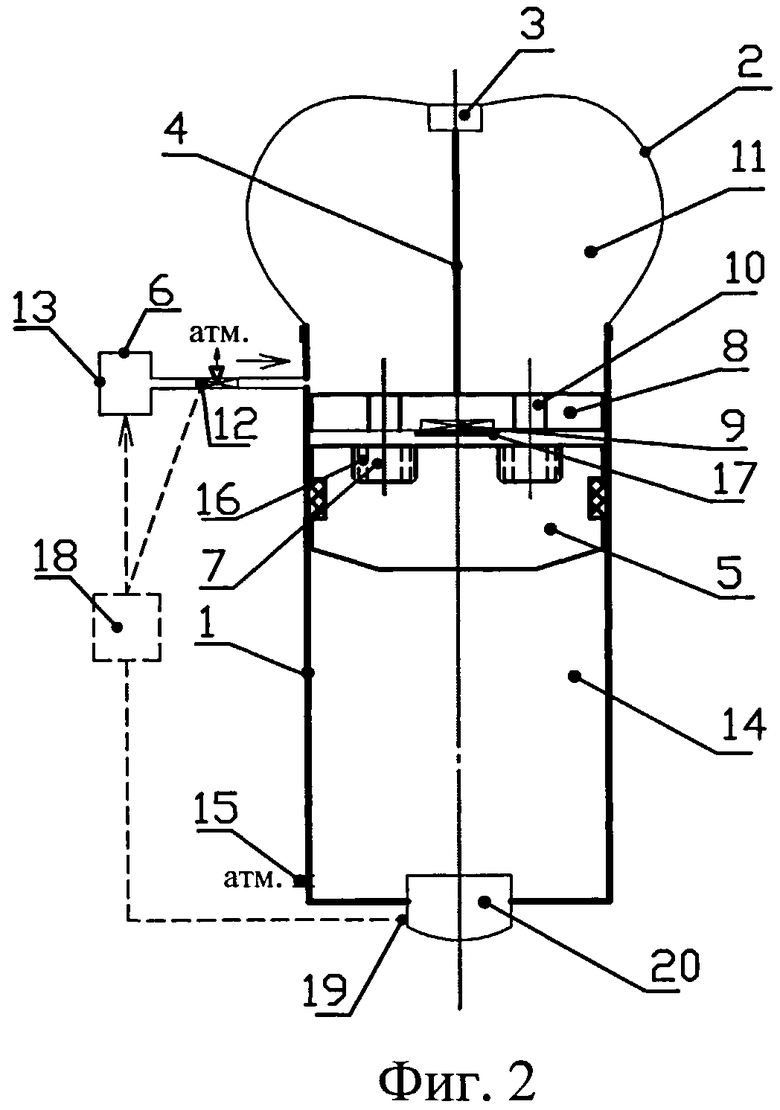
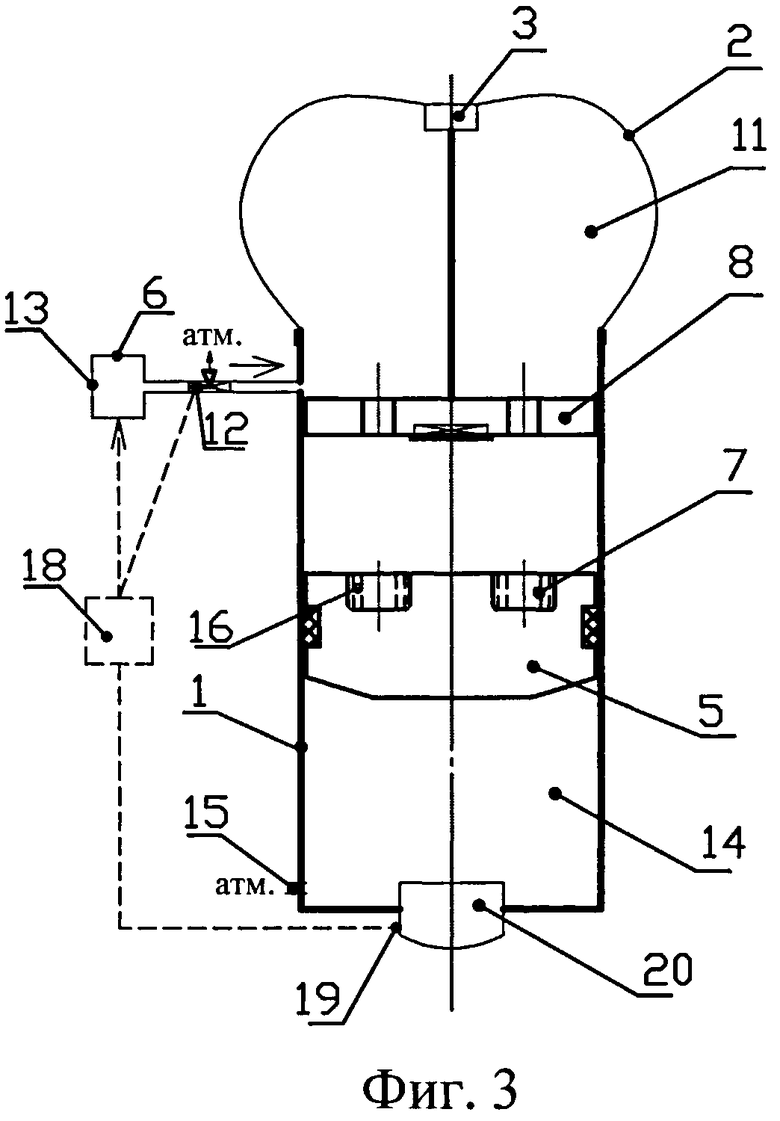
Сущность технического решения поясняется примерами конкретного исполнения пневматического подъемника и чертежами фиг.1, 2, 3, где на фиг.1 изображен подъемник в исходном состоянии, продольный разрез; на фиг.2 - то же, при верхнем положении поднимаемого элемента, продольный разрез; на фиг.3 - то же, при промежуточном положении поднимаемого элемента, продольный разрез.
Подъемник (фиг.1) содержит трубчатый корпус 1 (далее - корпус 1), в котором размещено подъемное средство, представляющее собой эластичную мембрану в виде рукава 2, один конец которого закреплен по периметру корпуса 1, а другой на замке 3, взаимодействующем через шток 4 с поднимаемым элементом, выполненным в виде ударника 5 (далее - ударник 5) и систему 6 подачи и отвода рабочего агента. Рукав 2, выполненный большего диаметра, чем диаметр корпуса 1, в исходном и в транспортном положении провисает внутрь корпуса 1. При перемещении ударника 5 вверх рукав 2 выходит за пределы корпуса 1, расширяется относительно него и работает вне его объема (фиг.2). Ударник 5 имеет кольцевую камеру 7 отрыва и взаимодействует с диском-фиксатором 8, жестко соединенным со штоком 4. Диск-фиксатор 8 снабжен магнитом 9 и имеет каналы 10, соединяющие кольцевую камеру 7 отрыва с рабочей камерой 11, расположенной между стенками корпуса 1, рукавом 2 и диском-фиксатором 8. Система 6 подачи и отвода рабочего агента выполнена в виде распределителя 12 рабочего агента (например, трехходового крана), соединенного с источником 13 рабочего агента (далее - источник 13), рабочей камерой 11 и атмосферой. Камера 14 под ударником 5 постоянно соединена каналом 15 с атмосферой. Кольцевая камера 7 отрыва для регулирования площади отрыва может быть снабжена, например, установленными в ней кольцами 16, а магнит 9 для регулирования силы его притяжения - диамагнитными пластинами 17. Подъемник может быть снабжен блоком 18 управления, соединенным с распределителем 12 рабочего агента и источником 13 системы 6 подачи и отвода рабочего агента и с контактным датчиком 19, расположенным на рабочем инструменте 20.
Подъемник работает следующим образом. В исходном, нижнем, положении ударника 5 (фиг.1) в рабочей камере 11 посредством источника 13 создается избыточное давление рабочего агента. При этом распределитель 12 рабочего агента закрыт в направлении выхлопа в атмосферу. Рукав 2 начинает надуваться и выходить за пределы корпуса 1 (фиг.2). Его рабочая площадь становится больше площади поверхности диска-фиксатора 8. Диск-фиксатор 8, жестко скрепленный штоком 4 с замком 3 рукава 2, перемещается вверх по корпусу 1, увлекая за собой ударник 5 с помощью силы притяжения магнита 9. При наполнении рукава 2 рабочим агентом (фиг.2) давление его в рабочей камере 11 продолжает увеличиваться за счет поступления рабочего агента от источника 13. Рабочий агент при повышении давления поступает через каналы 10 в камеру 7 отрыва ударника 5. При этом сила притяжения магнита 9, удерживающая ударник 5, меньше, чем сила давления рабочего агента на площадь отрыва ударника 5. Ударник 5 отрывается от диска-фиксатора 8 и с начальным ускорением от давления рабочего агента в рабочей камере 11 перемещается вниз (фиг.3), нанося в конце хода удар по рабочему инструменту 20 (фиг.1). После удара распределитель 12 открывают на выхлоп рабочего агента из рабочей камеры 11 в атмосферу (в гидравлических ударных машинах - в сливной бак), закрывая при этом поступление рабочего агента от источника 13 в рабочую камеру 11. Диск -фиксатор 8 под действием собственного веса опускается до исходного положения, перемещая при этом шток 4 и замок 3 рукава 2, и с помощью магнита 9 сцепляется с ударником 5. Рукав 2 сжимается, вытесняя при этом рабочий агент из рабочей камеры 11 через распределитель 12 в атмосферу. Цикл повторяется.
С помощью колец 16 изменяется площадь камеры 7 отрыва, и соответственно, усилие отрыва. Усилие отрыва можно изменять и с помощью диамагнитных пластин 17, регулируя силу притяжения магнита 9 к ударнику 5.
Повышения эффективности подъемника можно добиться автоматизацией его работы с помощью блока 18 управления, по сигналу которого происходит включение источника 13 на поступление рабочего агента в рабочую камеру 11 через распределитель 12, переключение распределителя 12 на выхлоп в атмосферу из рабочей камеры 11 после сигнала от контактного датчика 19 на блок 18 управления при ударе по рабочему инструменту 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 2014 |
|
RU2553416C1 |
| ПОДЪЕМНИК | 1991 |
|
RU2092420C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2030353C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2012540C1 |
| ПОДЪЕМНИК | 1991 |
|
RU2048396C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2040456C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2048415C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2049713C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2012539C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2092427C1 |
Изобретение относится к машиностроению - к машинам ударного действия, используется в сейсморазведке, строительстве и горном деле. Пневматический подъемник содержит установленный вертикально трубчатый корпус, в котором размещено подъемное средство - эластичная мембрана в виде рукава, один конец которого закреплен по периметру трубчатого корпуса, а другой - на замке, взаимодействующем через шток с поднимаемым элементом в виде ударника с кольцевой камерой отрыва, систему подачи и отвода рабочего агента в трубчатый корпус и диск-фиксатор с магнитом. Рукав выполнен большего диаметра, чем диаметр трубчатого корпуса, и установлен с возможностью нахождения вне и внутри последнего. Ударник взаимодействует с диском-фиксатором, жестко закрепленным в нижней части штока и имеющим каналы, которыми кольцевая камера отрыва ударника соединена с рабочей камерой между рукавом и диском-фиксатором. Система подачи и отвода рабочего агента выполнена в виде распределителя, соединенного с источником рабочего агента, рабочей камерой и атмосферой. Камера под ударником постоянно соединена с атмосферой. Изобретение обеспечивает повышение эффективности работы за счет увеличения энергетических показателей и повышение надежности работы за счет упрощения конструкции в целом при снижении стоимости подъемника. 3 з.п. ф-лы, 3 ил.
1. Пневматический подъемник, содержащий установленный вертикально трубчатый корпус, в котором размещено подъемное средство, представляющее собой эластичную мембрану в виде рукава, один конец которого закреплен по периметру трубчатого корпуса, а другой - на замке, взаимодействующем через шток с поднимаемым элементом, и систему подачи и отвода рабочего агента в трубчатый корпус, отличающийся тем, что он снабжен диском-фиксатором, оснащенным магнитом, при этом рукав, выполненный большего диаметра, чем диаметр трубчатого корпуса, установлен с возможностью нахождения вне и внутри трубчатого корпуса, а поднимаемый элемент выполнен в виде ударника с кольцевой камерой отрыва, взаимодействующего с диском-фиксатором, жестко закрепленным в нижней части штока и имеющим каналы, которыми кольцевая камера отрыва ударника соединена с рабочей камерой, расположенной между рукавом и диском-фиксатором, при этом система подачи и отвода рабочего агента выполнена в виде распределителя, соединенного с источником рабочего агента, указанной рабочей камерой и атмосферой, а камера под ударником постоянно соединена с атмосферой.
2. Пневматический подъемник по п.1, отличающийся тем, что кольцевая камера отрыва ударника выполнена с регулируемой площадью отрыва.
3. Пневматический подъемник по п.1, отличающийся тем, что магнит диска-фиксатора снабжен диамагнитными пластинами для регулировки силы его притяжения.
4. Пневматический подъемник по любому из пп.1-3, отличающийся тем, что он снабжен блоком управления, соединенным с распределителем рабочего агента и источником рабочего агента системы подачи и отвода рабочего агента и с контактным датчиком, расположенным на рабочем инструменте.
| RU 2055803 C1, 10.03.1996 | |||
| Пневматическая машина ударного действия | 1984 |
|
SU1180497A1 |
| Пневматическая машина ударного действия | 1982 |
|
SU1062387A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ БИТУМНО-ПОЛИМЕРНОЙ КОМПОЗИЦИИ | 1993 |
|
RU2045492C1 |

