Предлагаемые способ и система относятся к области организации и управления движением на железных дорогах и предназначены для идентификации радиочастотных меток, размещенных на пути следования железнодорожного транспорта.
Известны способы и системы радиочастотной идентификации и позиционирования железнодорожного транспорта (авт. свид. СССР №№457.030, 498.197, 931.515, 977.251; патенты РФ №№2.054.694, 2.189.599, 2.191.127, 2.203.821, 2.222.030, 2.314.956, 2.314.957, 2.346. 840, 2.397.094, 2.408.026; патенты США №№3.771.119, 4.551.725, 4.739.328, 6.903.656, 7.072.747; патенты Великобритании №№1.024.735, 2.093.593; патенты EP №№0.593.910, 1.112.207 и другие).
Из известных способов и систем наиболее близкими к предлагаемым являются «Способ и система прицельной остановки железнодорожных транспортных средств» (патент РФ №2.397.094, B61L 25/00, 2009), которые и выбраны в качестве прототипов.
Известные способ и система прицельной остановки железнодорожных транспортных средств основаны на использовании технологии радиочастотной идентификации, при которой осуществляется последовательное считывание и обработка информации, как минимум, с двух пассивных радиочастотных меток, расположенных на пути следования железнодорожного транспортного средства, при этом первая метка находится на подъезде, например, к платформе, а вторая располагается в конце участка пути в месте остановки, например, в конце платформы. Технический результат состоит в обеспечении точного (прицельного) торможения электропоездов.
Однако известные технические решения не полностью реализуют свои потенциальные возможности. Они могут быть использованы и для измерения скорости, пройденного пути и определения направления движения и местоположения скоростных железнодорожных транспортных средств.
Технической задачей изобретения является расширение функциональных возможностей известных технических решений путем измерения скорости, пройденного пути и определения направления движения и местоположения скоростных железнодорожных транспортных средств.
Поставленная задача решается тем, что способ радиочастотной идентификации и позиционирования железнодорожного транспорта, состоящий в том, что на каждом участке железнодорожного пути при подъезде к месту остановки, по каждому направлению движения, располагают, как минимум, две радиочастотные метки, при этом первую метку размещают на подъезде к участку остановки, а вторую размещают в месте остановки, а устройством управления, расположенным на железнодорожном транспортном средстве, обрабатывают информацию, поступающую с устройства измерения скорости и через радиочастотный считыватель с первой радиочастотной метки, расположенной на участке железнодорожного пути при подъезде к месту остановки на известном расстоянии от второй радиочастотной метки на данном участке пути, и вырабатывают управляющий сигнал для тормозной системы железнодорожного транспортного средства, которая осуществляет по заранее заданному закону процесс торможения таким образом, чтобы к моменту достижения железнодорожным транспортным средством второй радиочастотной метки скорость железнодорожного транспортного средства была бы близка к нулевой, а остановку железнодорожного транспортного средства осуществляют сигналом, полученным радиочастотным считывателем со второй радиочастотной метки, при этом характеристики участка пути до места остановки кодируют в первой радиочастотной метке, а информацию второй радиочастотной метки логически связывают с информацией первой метки, отличается от ближайшего аналога тем, что на пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути устанавливают дополнительные радиочастотные метки со сдвигом друг относительно друга, в радиочастотном считывателе формируют три гармонические колебания с частотами w1, w2 и w3 соответственно, усиливают их по мощности и излучают в эфир тремя приемопередающими антеннами соответственно, при этом гармоническим колебанием с частотой w1 облучают первую и вторую радиочастотные метки при подъезде железнодорожного транспортного средства к месту остановки, а двумя другими гармоническими колебаниями с частотами w2 и w3 облучают дополнительные радиочастотные метки, расположенные слева и справа от железнодорожного пути соответственно, принимают указанные гармонические колебания радиочастотными метками, настроенными на соответствующие частоты, в каждой радиочастотной метке гармоническое колебание преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, улавливают приемником считывателя, умножают и делят фазу принятого сложного сигнала с фазовой манипуляцией на два, выделяют гармоническое колебание и используют его в качестве опорного напряжения для синхронного детектирования принятого сложного сигнала с фазовой манипуляцией, выделяют низкочастотное напряжение, соответствующее структуре встречно-штыревого преобразователя, сложный сигнал с фазовой манипуляцией, принятый третьим приемником, перемножают со сложным сигналом с фазовой манипуляцией, принятым вторым приемником и пропущенным через первый блок регулируемой задержки, выделяют низкочастотное напряжение, формируя тем самым первую взаимно-корреляционную функцию R1(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают первую взаимно-корреляционную функцию на максимальном уровне, фиксируют временную задержку τ1 между сигналами, принятыми вторым и третьим приемниками, сложный сигнал с фазовой манипуляцией, принятый вторым приемником, перемножают со сложным сигналом с фазовой манипуляцией, принятым третьим приемником и пропущенным через второй блок регулируемой задержки, выделяют низкочастотное напряжение, формируя тем самым вторую взаимно-корреляционную функцию R2(τ), изменением задержки т поддерживают вторую взаимно-корреляционную функцию на максимальном уровне, фиксируют временную задержку τ2 между сигналами, принятыми третьим и вторым приемниками, по полученным значениям τ1 и τ2 определяют значения скоростей V1, V2 пройденного пути S и направление движения железнодорожного транспортного средства, измеренные значения преобразуют в цифровые коды, формируют из них модулирующий код М(t), манипулируют им высокочастотное колебание с частотой wc, формируя сложный сигнал с фазовой манипуляцией, усиливают его по мощности, излучают в эфир, улавливают пунктом сбора и обработки информации, преобразуют по частоте с использованием гетеродина, который перестраивают по частоте в заданном диапазоне частот, выделяют напряжение промежуточной частоты, измеряют ширину спектра сложного сигнала с фазовой манипуляцией на промежуточной частоте и ширину спектра его второй гармоники, сравнивают их между собой и в случае их значительного различия фиксируют факт обнаружения сложного сигнала с фазовой манипуляцией, прекращают перестройку частоты гетеродина и осуществляют синхронное детектирование обнаруженного сложного сигнала с фазовой манипуляцией, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M(t), фиксируют и анализируют его, причем первую приемопередающую антенну считывателя устанавливают на днище железнодорожного транспортного средства, вторую и третью приемопередающие антенны устанавливают слева и справа на кабине машиниста соответственно, а передающую антенну устанавливают сверху на кабине машиниста.
Поставленная задача решается тем, что система радиочастотной идентификации и позиционирования железнодорожного транспорта, содержащая, по меньшей мере, две радиочастотные метки на каждом участке пути, где необходима остановка, установленные на известных местах железнодорожного пути, и расположенные на железнодорожном транспортном средстве последовательно включенные устройство измерения скорости железнодорожного транспортного средства, устройство управления, второй вход которого соединен с выходом радиочастотного считывателя, и устройство регулирования скорости железнодорожного транспортного средства, отличается от ближайшего аналога тем, что она снабжена дополнительными радиочастотными метками, установленными по пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути со сдвигом друг относительно друга, и пунктом сбора и обработки информации, при этом радиочастотный считыватель выполнен в виде последовательно включенных устройства управления радиочастотным считывателем, задающего генератора, первого усилителя мощности, первого циркулятора, вход-выход которого связан с первой приемопередающей антенной, первого полосового фильтра, первого удвоителя фазы, первого делителя фазы на два, первого узкополосного фильтра и первого фазового детектора, второй вход которого соединен с выходом первого полосового фильтра, а выход подключен к входу устройства управления радиочастотным считывателем, последовательно подключенных к выходу задающего генератора первого преобразователя частоты, второго усилителя мощности, второго циркулятора, вход-выход которого связан со второй приемопередающей антенной, второго полосового фильтра, второго удвоителя фазы, второго делителя фазы на два, второго узкополосного фильтра, второго фазового детектора, второй вход которого соединен с выходом второго полосового фильтра, сумматора, фазового манипулятора, второй вход которого соединен с выходом генератора высокочастотных колебаний, четвертого усилителя мощности и передающей антенны, последовательно подключенных к выходу задающего генератора второго преобразователя частоты, третьего усилителя мощности, третьего циркулятора, вход-выход которого связан с третьей приемопередающей антенной, третьего полосового фильтра, третьего удвоителя фазы, третьего делителя фазы на два, третьего узкополосного фильтра и третьего фазового детектора, второй вход которого соединен с выходом третьего полосового фильтра, а выход подключен к второму входу сумматора, последовательно подключенных к выходу второго полосового фильтра первого блока регулируемой задержки, первого перемножителя, второй вход которого соединен с выходом третьего полосового фильтра, первого фильтра нижних частот, первого экстремального регулятора, первого блока регулируемой задержки, блока определения направления движения, первого аналого-цифрового преобразователя и первой линии задержки, выход которой подключен к третьему входу сумматора, последовательно подключенных к выходу третьего полосового фильтра второго блока регулируемой задержки, второго перемножителя, второй вход которого соединен с выходом второго полосового фильтра, второго фильтра нижних частот, второго экстремального регулятора, второго блока регулируемой задержки, блока расчета текущей скорости, второй вход которого соединен с выходом первого блока регулируемой задержки, второго аналого-цифрового преобразователя и второй линии задержки, выход которой соединен с четвертым входом сумматора, последовательно подключенных к выходу блока расчета текущей скорости интегратора, третьего аналого-цифрового преобразователя и третьей линии задержки, выход которой соединен с пятым входом сумматора, второй вход блока определения направления движения соединен с выходом второго блока регулируемой задержки, причем первая приемопередающая антенна считывателя установлена на днище железнодорожного транспортного средства, вторая и третья приемопередающие антенны установлены слева и справа на кабине машиниста соответственно, а передающая антенна установлена сверху на кабине машиниста, пункт сбора и обработки информации выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, смесителя, второй вход которого через гетеродин соединен с выходом блока поиска, усилителя промежуточной частоты, удвоителя фазы, второго анализатора спектра, блока сравнения, второй вход которого через первый анализатор спектра соединен с выходом усилителя промежуточной частоты, порогового блока, второй вход которого через линию задержки соединен с его выходом, ключа, второй вход которого соединен с выходом усилителя промежуточной частоты, фазового детектора и компьютера, последовательно подключенных к выходу удвоителя фазы делителя фазы на два и узкополосного фильтра, выход которого соединен с вторым входом фазового детектора, при этом вход блока поиска соединен с выходом порогового блока, каждая радиочастотная метка выполнена в виде пьезокристалла с нанесенными на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной.
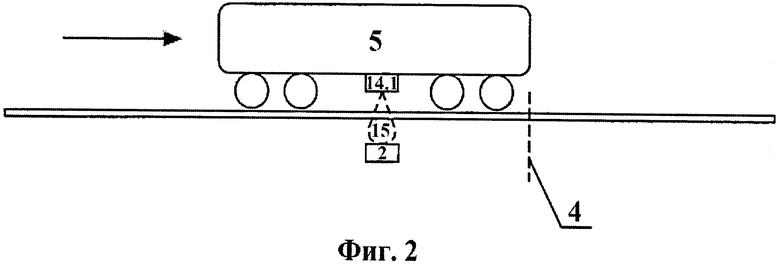
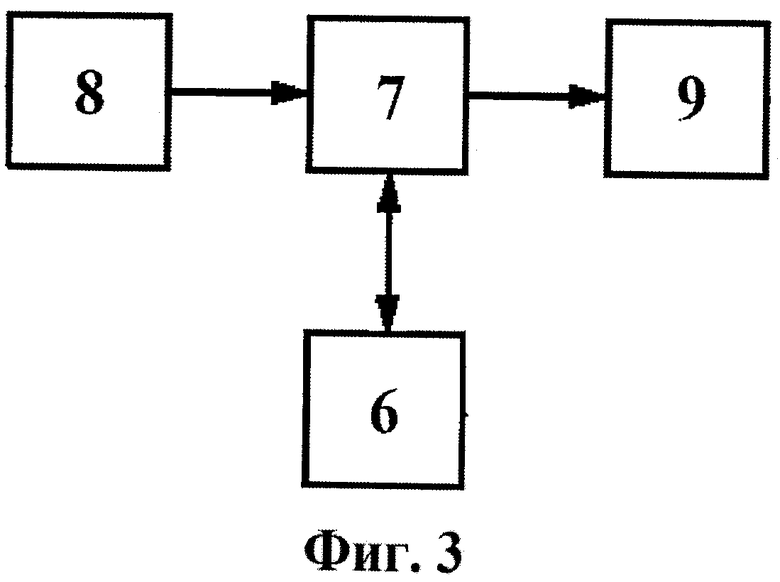
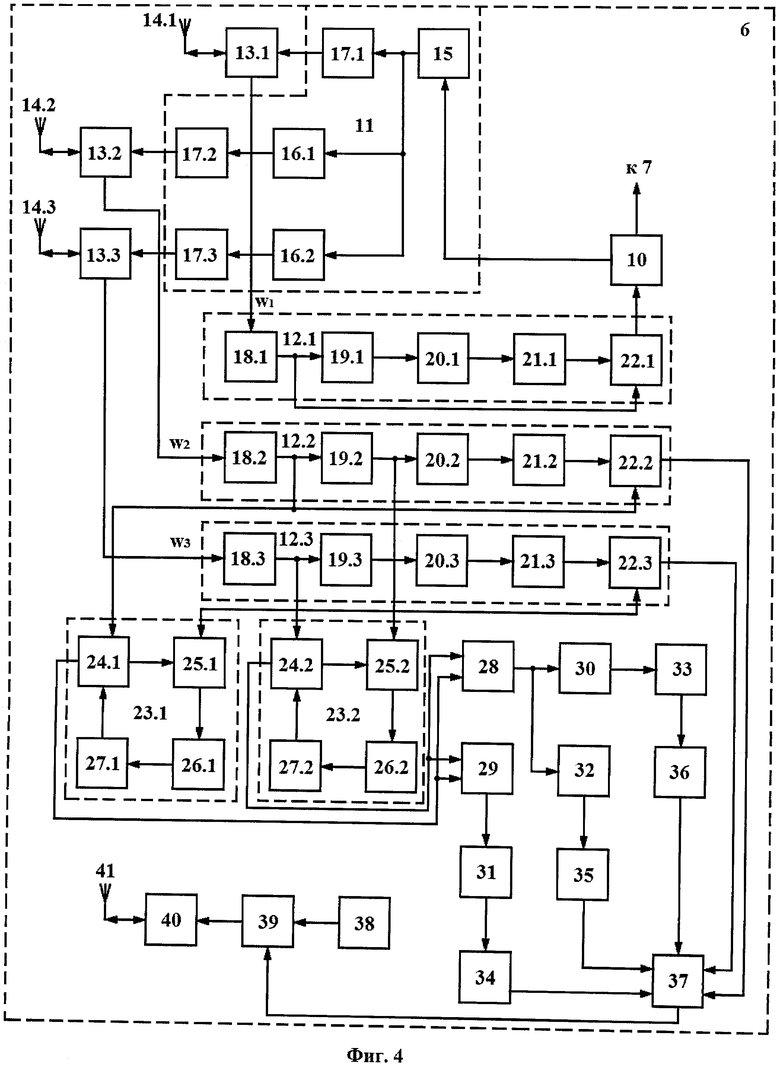
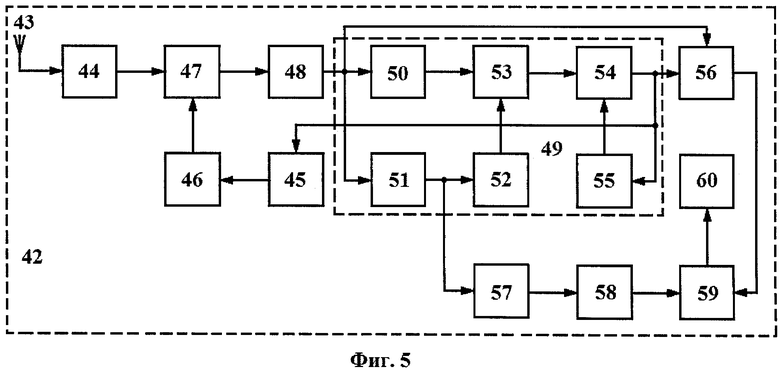
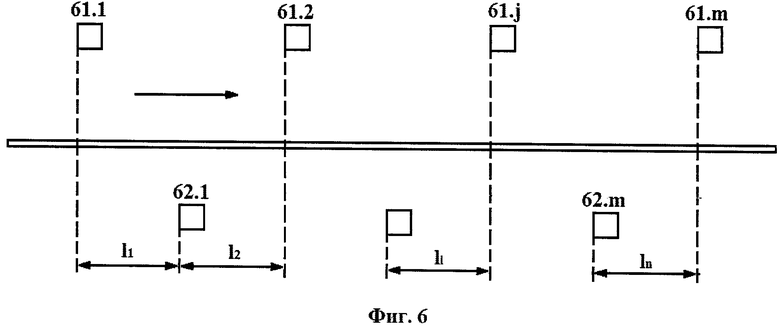
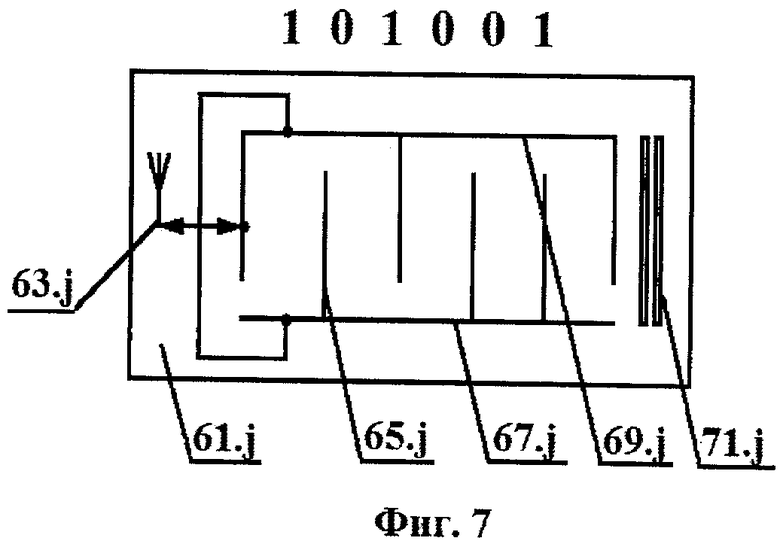
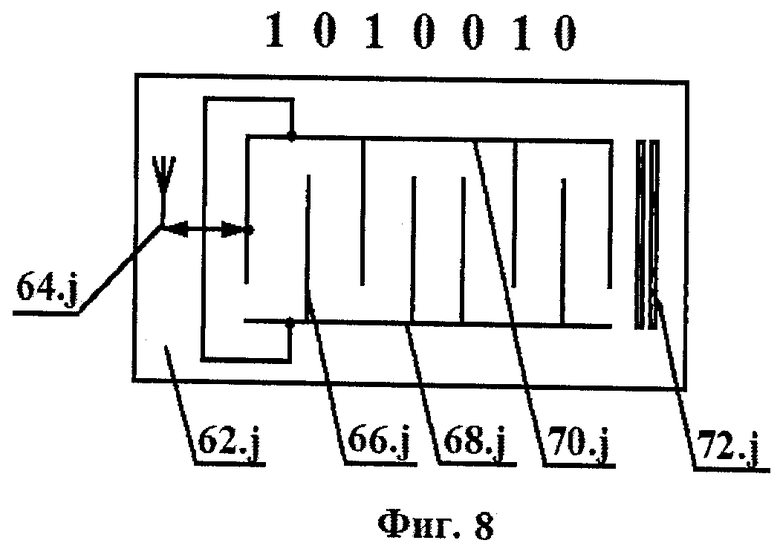
На фиг.1 показан пример расположения радиочастотных меток 1 и 2 около платформы. На фиг.2 показан пример расположения первой приемопередающей антенны 14.1 на днище железнодорожного транспортного средства. На фиг.3 показан вариант части системы, находящейся на железнодорожном транспортном средстве. На фиг.4 показан пример реализации радиочастотного считывателя 6, устанавливаемого на железнодорожном транспортном средстве. На фиг.5 показан пример реализации пункта 42 сбора и обработки информации. На фиг.6 показан пример расположения радиочастотных меток 61.j и 62.j слева и справа от железнодорожного пути. На фиг.7 и 8 показан пример реализации радиочастотных меток 61.j и 62.j (j=1, 2, …, m, где m - количество дополнительных радиочастотных меток).
Первая радиочастотная метка 1 располагается на участке железнодорожного пути при подъезде к месту остановки, например к платформе 3, на известном расстоянии от второй радиочастотной метки 2, которая располагается в месте остановки, таким образом, чтобы начало железнодорожного транспортного средства располагалось на линии остановки 4 (фиг.1).
Устройство 7 управления, расположенное на железнодорожном транспортном средстве, обрабатывает информацию, поступающую с устройства 8 измерения скорости и через радиочастотный считыватель 6 с первой радиочастотной метки 1. Устройство 7 управления на основании полученной информации вырабатывает управляющий сигнал на устройство 9 регулирования скорости железнодорожного транспортного средства, которое осуществляет процесс торможения по заранее заданному закону (фиг.3). Торможение осуществляется таким образом, чтобы к моменту достижения железнодорожным транспортным средством 5 второй радиочастотной метки 2 скорость железнодорожного транспортного средства 5 была бы близка к нулевой, а остановка железнодорожного транспортного средства осуществляется сигналом, полученным радиочастотным считывателем 6 со второй радиочастотной метки 2 (фиг.2).
Радиочастотный считыватель 6 содержит последовательно включенные устройство 10 управления, задающий генератор 15, первый усилитель 17.1 мощности, первый циркулятор 13.1, вход-выход которого связан с первой приемопередающей антенной 14.1, первый полосовой фильтр 18.1, первый удвоитель 19.1 фазы, первый делитель 20.1 фазы на два, первый узкополосный фильтр 21.1 и первый фазовый детектор 22.1, второй вход которого соединен с выходом первого полосового фильтра 18.1, а выход подключен к входу устройства 10 управления радиочастотным считывателем 6. К выходу задающего генератора 15 последовательно подключены первый преобразователь 16.1 частоты, второй усилитель 17.2 мощности, второй циркулятор 13.2, вход-выход которого связан со второй приемопередающей антенной 14.2, второй полосовой фильтр 18.2, второй удвоитель 19.2 фазы, второй делитель 20.2 фазы на два, второй узкополосный фильтр 21.2, второй фазовый детектор 22.2, второй вход которого соединен с выходом второго полосового фильтра 18.2, сумматор 37, фазовый манипулятор 39, второй вход которого соединен с выходом генератора 38 высокочастотных колебаний, четвертый усилитель 40 мощности и передающая антенна 41. К выходу задающего генератора 15 последовательно подключены второй преобразователь 16.2 частоты, третий усилитель 17.3 мощности, третий циркулятор 13.3, вход-выход которого связан с третьей приемопередающей антенной 14.3, третий полосовой фильтр 18.3, третий удвоитель 19.3 фазы, третий делитель 20.3 фазы на два, третий узкополосный фильтр 21.3 и третий фазовый детектор 22.3, второй вход которого соединен с выходом третьего полосового фильтра 18.3, а выход подключен к второму входу сумматора 37. К выходу второго полосового фильтра 18.2 последовательно подключены первый блок 24.1 регулируемой задержки, первый перемножитель 25.1, второй вход которого соединен с выходом третьего полосового фильтра 18.3, первый фильтр 26.1 нижних частот, первый экстремальный регулятор 27.1, первый блок 24.1 регулируемой задержки, блок 29 определения направления движения, второй вход которого соединен с выходом второго блока 24.2 регулируемой задержки, первый аналого-цифровой преобразователь 31 и первая линия 34 задержки, выход которого соединен с третьим входом сумматора 37. К выходу третьего полосового фильтра 18.3 последовательно подключены второй блок 24.2 регулируемой задержки, второй перемножитель 25.2, второй вход которого соединен с выходом второго полосового фильтра 18.2, второй фильтр 26.2 нижних частот, второй экстремальный регулятор 27.2, второй блок 24.2 регулируемой задержки, блок 28 расчета текущей скорости, второй вход которого соединен с выходом первого блока 24.1 регулируемой задержки, второй аналого-цифровой преобразователь 32 и вторая линия 35 задержки, выход которого подключен к четвертому входу сумматора 37. К выходу блока 28 расчета текущей скорости последовательно подключены интегратор 30, третий аналого-цифровой преобразователь 33 и третья линия 36 задержки, выход которой соединен с пятым входом сумматора 37.
Задающий генератор 15, первый 16.1 и второй 16.2 преобразователи частоты, первый 17.1, второй 17.2 и третий 17.3 усилители мощности образуют формирователь 11 запросных сигналов. Полосовой фильтр 18.1 (18.2, 18.3), удвоитель 19.1 (19.2, 19.3) фазы, делитель 20.1 (20.2, 20.3) фазы на два, узкополосный фильтр 21.1 (21.2, 21.3) и фазовый детектор 22.1 (22.2, 22.3) образуют первый 12.1 (второй 12.2, третий 12.3) приемник. Первый блок 24.1 регулируемой задержки, первый перемножитель 25.1, первый фильтр 26.1 нижних частот и первый экстремальный регулятор 27.1 образуют первый коррелятор 23.1. Второй блок 24.2 регулируемой задержки, второй перемножитель 25.2, второй фильтр 26.2 нижних частот и второй экстремальный регулятор 27.2 образуют второй коррелятор 23.2.
Первая приемопередающая антенна 14.1 считывателя 6 установлена на днище железнодорожного транспортного средства 5, вторая 14.2 и третья 14.3 приемопередающие антенны установлены слева и справа на кабине машиниста соответственно, а передающая антенна 41 установлена сверху на кабине машиниста.
Пункт 42 сбора и обработки информации (концентратор) содержит последовательно включенные приемную антенну 43, усилитель 44 высокой частоты, смеситель 47, второй вход которого через гетеродин 46 соединен с выходом блока 45 поиска, усилитель 48 промежуточной частоты, удвоитель 51 фазы, второй анализатор 52 спектра, блок 53 сравнения, второй вход которого через первый анализатор 50 спектра соединен с выходом усилителя 48 промежуточной частоты, пороговый блок 54, второй вход которого через линию 55 задержки соединен с его выходом, ключ 56, второй вход которого соединен с выходом усилителя 48 промежуточной частоты, фазовый детектор 59 и компьютер 60. К выходу удвоителя 51 фазы последовательно подключены делитель 57 фазы на два и узкополосный фильтр 58, выход которого соединен с вторым входом фазового детектора 59.
Первый 50 и второй 52 анализаторы спектра, удвоитель 51 фазы, блок 53 сравнения, пороговый блок 54 и линия задержки 55 образуют обнаружитель (селектор) 49 ФМн-сигналов.
Каждая радиочастотная метка 61.j (62.j) выполнена в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной 63.j (64.j), и набором отражателей 71.j (72.j). При этом встречно-штыревой преобразователь (ВШП) содержит две гребенчатые системы электродов 65.j (66.j), электроды каждой из гребенок соединены друг с другом шинами 67.j (68.j) и 69.j (70.j), связанными с микрополосковой антенной 63.j (64.j) (j=1, 2, …, m, где m - количество дополнительных радиочастотных меток).
Система, реализующая предлагаемый способ радиочастотной идентификации и позиционирования железнодорожного транспорта, работает следующим образом.
При приближении железнодорожного транспортного средства 5 к месту остановки, например к платформе 3, радиочастотный считыватель 6, работающий постоянно или включающийся по командам устройства 7 управления в соответствии с заложенной в нем картой пути, через первую приемопередающую антенну 14.1 считывает информацию с первой радиочастотной метки 1, декодирует ее в первом приемнике 12.1 ответного сигнала, выделяет необходимые данные в устройстве 10 управления радиочастотным считывателем 6 и передает ее в устройство 7 управления. Первая радиочастотная метка 1 содержит и передает в устройство 7 управления всю необходимую информацию, в том или ином виде, о расстоянии до второй радиочастотной метки 2. Устройство 7 управления на основе заложенного в него алгоритма и на основании данных о скорости железнодорожного транспортного средства, полученных с устройства 8 измерения скорости, вырабатывает управляющий сигнал, который поступает на устройство 9 регулирования скорости железнодорожного транспортного средства 5, которое осуществляет процесс торможения по заранее заданному закону таким образом, чтобы при подъезде к второй радиочастотной метке 2 иметь скорость порядка 2-5 км/час. При подъезде ко второй радиочастотной метке 2 она попадает в диаграмму направленности 15 первой приемопередающей антенны 14.1 радиочастотного считывателя 6. Считанная информация обрабатывается и проверяется устройством 7 управления, что эта радиочастотная метка является местом остановки и при выполнении определенного критерия, например максимума мощности ответного сигнала, выдает управляющий сигнал на устройство 9 регулирования скорости на полную остановку железнодорожного транспортного средства 5. При этом радиочастотные метки 1 и 2 устанавливаются на железнодорожном пути, в частности могут крепиться к шпалам, а первая приемопередающая антенна 14.1 радиочастотного считывателя 6 устанавливается на днище железнодорожного транспортного средства 5, при этом ее диаграмма направленности направлена вниз (фиг.2). Остальные элементы радиочастотного считывателя 6 могут быть установлены в кабине машиниста.
В качестве устройства 8 измерения скорости и устройства 9 регулирования скорости могут быть использованы штатные устройства железнодорожного транспортного средства 5. Устройство 7 управления может быть выполнено на базе стандартного микропроцессорного блока. Ширина диаграммы направленности 15 будет определять точность останова железнодорожного транспортного средства 5 относительно линии останова 4.
Для дистанционного контроля железнодорожного транспортного средства при его следовании по заданному маршруту дополнительные радиочастотные метки 61.j и 62.j размещаются по обеим сторонам железнодорожного пути со сдвигом друг относительно друга (фиг.6). При этом каждая метка 61.j (62.j) представляет собой пьезокристалл с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем (ВШП), связанным с микрополосковой антенной 63.j (64.j), и набором отражателей 71.j (72.j). Встречно-штыревой преобразователь содержит две гребенчатые системы электродов 65.j (66.j), электроды каждой из гребенок соединены друг с другом шинами 67.j (68j) и 69.j (70.j), связанными с микрополосковой антенной 63.j (64.j) (j=1, 2, …, m, где m - количество дополнительных радиочастотных меток, 1; - расстояние между соседними смежными радиочастотными метками, i=1, 2, …, n).
Радиочастотные метки 61.j, расположенные слева от железнодорожного пути, настроены на частоту w2, а радиочастотные метки 62.j, расположенные справа от железнодорожного пути, настроены на частоту w3. Резонансная частота радиочастотной метки определяется расстоянием между электродами, а порядок расположения электродов определяет идентификационный номер радиочастотной метки (фиг.7, 8).
Задающий генератор 15 считывателя 6 формирует гармоническое колебание

где U1, w1, φ1, T1 - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания,
которое поступает на входы первого 16.1 и второго 16.2 преобразователей частоты. Последние формируют гармонические колебания:


где 
При этом отношения частот n1/m1 и n2/m2 выбираются дробно-рациональными для исключения связи на гармониках. Для этого в преобразователях 16.1 и 16.2 используются регенеративные делители (Основы радионавигационных измерений. Под редакцией Н.Ф. Клюева, МО СССР, 1987, с.269).
Гармонические колебания u1(t), u2(t) и u3(t) усиливаются в усилителях 17.1, 17.2 и 17.3 и через циркуляторы 13.1, 13.2 и 13.3 поступают в приемопередающие антенны 14.1, 14.2 и 14.3 соответственно и излучаются ими в эфир. Первая приемопередающая антенна 14.1 установлена на днище железнодорожного транспортного средства 5, при этом ее диаграмма направленности направлена вниз, считывает она информацию с радиочастотных меток 1 и 2, которые настроены на частоту w1 и устанавливаются на железнодорожном пути, в частности могут крепиться к шпалам.
Вторая 14.2 и третья 14.3 приемопередающие антенны установлены слева и справа на кабине машиниста соответственно, при этом их диаграммы направленности освещают радиочастотные метки 61.j и 62.j (j=1, 2, …, m), установленные слева и справа от железнодорожного пути и настроенные на частоты w2 и w3 соответственно (фиг.6).
Гармонические колебания u2(t) и u3(t) улавливаются приемопередающими антеннами 63.j и 64.j, преобразуются ВШП в акустические волны, которые распространяются по поверхности пьезокристаллов, отражаются от набора отражателей 71.j и 72.j и опять преобразуются в сложные сигналы с фазовой манипуляцией (ФМн):


где 
Сформированные сложные ФМн-сигналы u4(t) и u5(t) излучаются микрополосковыми антеннами 63.j и 64.j в эфир, принимаются антеннами 14.2 и 14.3 считывателя 6 и через циркуляторы 13.2 и 13.3 поступают на входы полосовых фильтров 18.2 и 18.3, частоты настройки которых выбираются следующим образом: wн2=w2, wн3=w3. Сложные ФМн-сигналы u4(t) и u5(t) выделяются полосовыми фильтрами 18.2 и 18.3, поступают на первые (информационные) входы фазовых детекторов 22.2 и 22.3 и на входы удвоителей 19.2 и 19.3 фазы соответственно. На выходе последних образуются гармонические колебания:


где 
Так как 



которые выделяются узкополосными фильтрами 21.1 и 21.2 соответственно, используются в качестве опорных напряжений и поступают на вторые (опорные) входы фазовых детекторов 22.2 и 22.3.
В результате синхронного детектирования на выходе фазовых детекторов 22.2 и 22.3 выделяются низкочастотные напряжения:


где 
пропорциональные идентификационным номерам дополнительных радиочастотных меток 61.j и 62.j. Низкочастотные напряжения uн2(t) и uн3(t) поступают на два входа сумматора 37.
Аналогичным образом работает и первая приемопередающая антенна 14.1, которая считывает информацию с первой 1 и второй 2 радиочастотных меток при торможении железнодорожного транспортного средства 5. В этом случае работает первый приемник 12.1, информация с которого поступает в устройство 7 управления. При этом используется частота w1.
Сложные ФМн-сигналы u4(t) и u5(t) одновременно поступают на входы двух корреляторов 23.1 и 23.2. Полученные на выходе перемножителей 25.1 и 25.2 напряжения пропускаются через фильтры 26.1 и 26.2 нижних частот соответственно, на выходах которых формируются взаимно-корреляционные функции R1(τ) и R2(τ), где τ - текущая временная задержка. Экстремальные регуляторы 27.1 и 27.2, предназначенные для поддержания максимального значения взаимно-корреляционных функций R1(τ), R2(τ), и подключенные к выходу фильтров 26.1, 26.2 нижних частот, воздействуют на управляющие входы блоков 24.1, 24.2 регулируемой задержки и поддерживают вводимую ими задержку τ равной τ1 и τ2 (τ=τ1, τ2=τ2), что соответствует максимальному значению взаимно-корреляционных функций R1(τ) и R2(τ). Значения τ1 и τ2 с соответствующих выходов блоков 24.1 и 24.2 регулируемой задержки поступают на входы блока 28 расчета текущей скорости, где определяются текущие скорости:


где l1 - расстояние между соседними смежными радиочастотными метками 61.j и 62.j, расположенными слева и справа от железнодорожного пути;
l2 - расстояние между соседними смежными радиочастотными метками 62.j и 61.j, расположенными справа и слева от железнодорожного пути.
Значения скорости V1 и V2 поступают на вход интегратора 30, на выходе которого формируется значение пройденного пути S.
Корреляционно-экстремальная обработка сложных ФМн-сигналов u4(t) и u5(t) позволяет определить направление движения железнодорожного транспортного движения путем поиска экстремума в зоне положительных и отрицательных аргументов взаимно-корреляционных функций R1(τ) и R2(τ). Наличие экстремума в зоне положительного аргумента свидетельствует о движении железнодорожного транспортного средства в прямом направлении и наоборот. Информация о знаке аргумента взаимно-корреляционных функций R1(τ) и R2(τ) поступает со знаковых выходов блоков 24.1 и 24.2 регулируемой задержки на входы блока 29 определения направления движения железнодорожного транспортного средства. Информация с выходов блоков 28, 29 и 30 поступает на входы аналого-цифровых преобразователей 31, 32 и 33, где преобразуется в цифровые коды, которые через линии задержки 34, 35 и 36 поступают на соответствующие входы сумматора 37. Время задержки τз1, τз2 и τз3 линией задержки 34, 35 и 36 выбираются таким образом, чтобы образованные цифровые коды просуммировать, в сумматоре 37 без перекрытия, т.е. чтобы разместить их последовательно на временной оси. На выходе сумматора 37 образуется модулирующий код M(t), содержащий сведения об идентификационных номерах дополнительных радиочастотных меток, скорости движения, пройденном пути и направлении движения железнодорожного транспортного средства.
Сформированный модулирующий код M(t) поступает на второй вход фазового манипулятора 39, на первый вход которого подается высокочастотное напряжение с выхода генератора 38

где Uc, wc, φc, Тc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного напряжения.
На выходе фазового манипулятора 39 образуется сложный ФМн-сигнал

где 
(K=1, 2, …, N);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс (Тс=N·τЭ).
который после усиления в усилителе 40 мощности поступает в передающую антенну 41, излучается ею в эфир, улавливается приемной антенной 43 пункта 42 сбора и обработки информации (концентратора) и через усилитель 44 высокой частоты поступает на первый вход смесителя 47, на второй вход которого подается напряжение гетеродина 46 линейно-изменяющейся частоты

где Uг, wг, φг, Тп - амплитуда, несущая частота, начальная фаза и период повторения напряжения гетеродина;

Передающая антенна 41 размещается сверху на кабине машиниста.
Поиск сложных ФМн-сигналов, излучаемых железнодорожными транспортными средствами, в заданном диапазоне частот Дf осуществляется блоком 45 поиска, который линейно по периодическому закону с периодом Тп перестраивает частоту гетеродина 46. В качестве блока 45 поиска может быть использован генератор пилообразного напряжения.
На выходе смесителя 47 образуются напряжения комбинационных частот. Усилителем 48 выделяется напряжение промежуточной (разностной) частоты

где 
wup=wc-wг - промежуточная (разностная) частота;
φuр=φс-φг,
которое представляет собой сложный сигнал с комбинированной фазовой манипуляцией и линейной частотной модуляцией (ФМн-ЛЧМ), выделяется усилителем 48 промежуточной и поступает на вход обнаружителя (селектора) 49 ФМн-сигналов, состоящего из первого 50 и второго 52 анализаторов спектра, удвоителя 51 фазы, блока 53 сравнения, порогового блока 54 и линии 55 задержки.
На выходе удвоителя 51 фазы образуется напряжение

в котором фазовая манипуляция уже отсутствует.
Ширина спектра Δf2 второй гармоники сигнала определяется длительностью Тc сигнала

тогда как ширина спектра Δfc входного ФМн-сигнала определяется длительностью τэ его элементарных посылок.

т.е. ширина спектра Δf2 второй гармоники сигнала в N раз меньше ширины спектра Δfc входного сигнала

Следовательно, при удвоении фазы сложного ФМн-сигнала его ширина спектра «сворачивается» в N раз. Это обстоятельство и позволяет обнаружить и отселектировать ФМн-сигнал даже тогда, когда его мощность на входе приемника меньше мощности шумов и помех.
Ширина спектра Δfc входного ФМн-сигнала измеряется с помощью первого анализатора 50 спектра, а ширина спектра Δf2 второй гармоники сигнала - с помощью второго анализатора 52 спектра. Напряжения UI и UII, пропорциональные Δfc и Δf2 соответственно, с выходов анализаторов 50 и 52 поступают на два входа блока 53 сравнения. На выходе последнего образуется напряжение только тогда, когда напряжения, поступающие на его входы, значительно различаются по амплитуде. Так как UI>>UII, то на выходе блока 53 сравнения образуется положительное напряжение, которое превышает пороговый уровень Uпор в пороговом блоке 54. Пороговое напряжение Uпор выбирается таким, чтобы его не превышали случайные помехи. При превышении порогового уровня Uпор в пороговом блоке 54 формируется постоянное напряжение, которое поступает на управляющий вход блока 45 поиска, выключая его, на вход линии 55 задержки и на управляющий вход ключа 56, открывая его. В исходном состоянии ключ 56 всегда закрыт.
При прекращении перестройки гетеродина 46 принудительная линейная частотная модуляция (ЛЧМ) исчезает и усилителем 48 промежуточной частоты выделяется следующее напряжение

которое через открытый ключ 56 поступает на первый (информационный) вход фазового детектора 59. В этом случае на выходе удвоителя 51 фазы образуется напряжение

которое поступает на вход делителя 57 фазы на два. На выходе последнего образуется напряжение

которое выделяется узкополосным фильтром 58, используется в качестве опорного напряжения и подается на второй (опорный) вход фазового детектора 59. В результате синхронного детектирования на выходе фазового детектора 59 образуется низкочастотное напряжение

где 
пропорциональное модулирующему коду M(t). Это напряжение поступает на вход компьютера 60, где анализируется передвижение железнодорожного транспортного средства и может наблюдаться визуально оператором на экране его монитора. Время задержки τз линии задержки 55 выбирается таким, чтобы можно было зафиксировать и проанализировать обнаруженный сложный ФМн-сигнал. По истечении этого времени напряжение с выхода порогового блока 54 поступает на управляющий вход порогового блока 54 и сбрасывает его содержимое на нулевое значение. С этого момента блок 45 поиска включается, а ключ 56 закрывается, т.е. они переводятся в свои исходные состояния. При обнаружении очередного ФМн-сигнала, излучаемого другим железнодорожным транспортным средством на другой несущей частоте, работа пункта 42 сбора и обработки информации происходит аналогичным образом, как это описано выше.
Таким образом, предлагаемые способ и система по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают не только прицельную остановку железнодорожных транспортных средств, но и позволяют определять направление, скорость, пройденный путь и местоположение железнодорожных транспортных средств. Это достигается использованием дополнительных радиочастотных меток, размещаемых на пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути со сдвигом друг относительно друга, пункта сбора и обработки информации и радиоканала с применением сложных ФМн-сигналов.
Указанные меры обеспечивают дистанционный мониторинг за движением железнодорожных транспортных средств, выполнением ими заданного графика движения, увеличивают интенсивность и безопасность железнодорожного движения, что особенно важно для скоростных железнодорожных транспортных средств.
Сложные ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМн-сигналы открывают новые возможности в технике передачи сообщений с железнодорожных транспортных средств на пункт сбора и обработки информации. Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
Тем самым функциональные возможности известных технических решений расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2012 |
|
RU2514130C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ АВТОТРАНСПОРТА И ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ДЛЯ ПРЕДОТВРАЩЕНИЯ АВАРИЙ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2013 |
|
RU2519169C1 |
| Способ радиочастотной идентификации крупного и мелкого рогатого скота и устройство для его реализации | 2019 |
|
RU2725728C1 |
| СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ ВОЕННОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2624556C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| Способ мониторинга состояния подземных сооружений метрополитена и система для его реализации | 2020 |
|
RU2740514C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2425396C1 |
| СИСТЕМА СИГНАЛИЗАЦИИ О ДОСТИЖЕНИИ ПРЕДЕЛЬНО ДОПУСТИМОЙ КОНЦЕНТРАЦИИ МЕТАНА В АТМОСФЕРЕ | 2010 |
|
RU2438186C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
Группа изобретений относится к области организации и управления движением на железных дорогах. Способ радиочастотной идентификации и позиционирования железнодорожного транспорта состоит в том, что на каждом участке пути располагают, как минимум, две радиочастотные метки. Первую метку размещают на подъезде к участку остановки, а вторую размещают в месте остановки. Также по обеим сторонам пути устанавливают дополнительные радиочастотные метки со сдвигом относительно друг друга. Система для реализации способа содержит две радиочастотные метки на каждом участке пути, устройство управления и считыватель. Система снабжена дополнительными радиочастотными метками и пунктом сбора и обработки информации. Решение направлено на расширение функциональных возможностей. 2 н.п. ф-лы, 8 ил.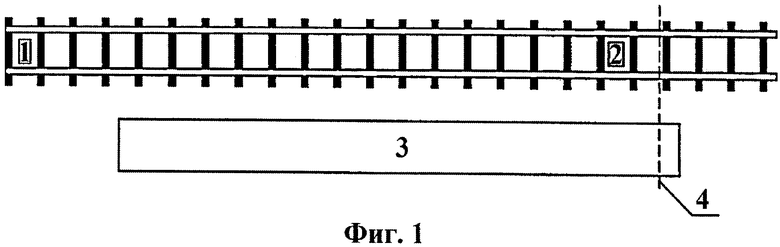
1. Способ радиочастотной идентификации и позиционирования железнодорожного транспорта, состоящий в том, что на каждом участке железнодорожного пути при подъезде к месту остановки, по каждому направлению движения, располагают, как минимум, две радиочастотные метки, при этом первую метку размещают на подъезде к участку остановки, а вторую размещают в месте остановки, а устройством управления, расположенным на железнодорожном транспортном средстве, обрабатывают информацию, поступающую с устройства измерения скорости и через радиочастотный считыватель с первой радиочастотной метки, расположенной на участке железнодорожного пути при подъезде к месту остановки на известном расстоянии от второй радиочастотной метки на данном участке пути, при этом характеристики участка пути до места остановки кодируют в первой радиочастотной метке, а информацию второй радиочастотной метки логически связывают с информацией первой метки, отличающийся тем, что на пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути устанавливают дополнительные радиочастотные метки со сдвигом друг относительно друга, в радиочастотном считывателе формируют три гармонических колебания с частотами w1, w2 и w3 соответственно, усиливают их по мощности и излучают в эфир тремя приемопередающими антеннами соответственно, при этом гармоническим колебанием с частотой w1 облучают первую и вторую радиочастотные метки при подъезде железнодорожного транспортного средства к месту остановки, а двумя другими гармоническими колебаниями с частотами w2 и w3 облучают дополнительные радиочастотные метки, расположенные слева и справа от железнодорожного пути соответственно, принимают указанные гармонические колебания радиочастотными метками, настроенными на соответствующие частоты, в каждой радиочастотной метке гармоническое колебание преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, улавливают приемником считывателя, умножают и делят фазу принятого сложного сигнала с фазовой манипуляцией на два, выделяют гармоническое колебание и используют его в качестве опорного напряжения для синхронного детектирования принятого сложного сигнала с фазовой манипуляцией, выделяют низкочастотное напряжение, соответствующее структуре встречно-штыревого преобразователя, сложный сигнал с фазовой манипуляцией, принимаемый третьим приемником, перемножают со сложным сигналом с фазовой манипуляцией, принимаемым вторым приемником и пропущенным через первый блок регулируемой задержки, выделяют низкочастотное напряжение, формируя тем самым первую взаимно корреляционную функцию R1(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают первую взаимно корреляционную функцию на максимальном уровне, фиксируют временную задержку τ1 между сигналами, принимаемыми вторым и третьим приемниками, сложный сигнал с фазовой манипуляцией, принимаемый вторым приемником, перемножают со сложным сигналом с фазовой манипуляцией, принятым третьим приемником и пропущенным через второй блок регулируемой задержки, выделяют низкочастотное напряжение, формируя тем самым вторую взаимно корреляционную функцию R2(τ), изменением задержки τ поддерживают вторую взаимно корреляционную функцию на максимальном уровне, фиксируют временную задержку τ2 между сигналами, принятыми третьим и вторым приемниками, по полученным значениям τ1 и τ2 определяют значения скоростей V1, V2 пройденного пути S и направление движения железнодорожного транспортного средства, измеренные значения преобразуют в цифровые коды, формируют из них модулирующий код M(t), манипулируют им высокочастотное колебание с частотой wc, формируя сложный сигнал с фазовой манипуляцией, усиливают его по мощности, излучают в эфир, улавливают пунктом сбора и обработки информации, преобразуют по частоте с использованием гетеродина, который перестраивают по частоте в заданном диапазоне частот, выделяют напряжение промежуточной частоты, измеряют ширину спектра сложного сигнала с фазовой манипуляцией на промежуточной частоте и ширину спектра его второй гармоники, сравнивают их между собой и в случае их значительного различия фиксируют факт обнаружения сложного сигнала с фазовой манипуляцией, прекращают перестройку частоты гетеродина и осуществляют синхронное детектирование обнаруженного сложного сигнала с фазовой манипуляцией, выделяют низкочастотное напряжение, пропорциональное модулирующему коду M(t), фиксируют и анализируют его, причем первую приемопередающую антенну считывателя устанавливают на днище железнодорожного транспортного средства, вторую и третью приемопередающие антенны устанавливают слева и справа на кабине машиниста соответственно, а передающую антенну устанавливают сверху на кабине машиниста.
2. Система радиочастотной идентификации и позиционирования железнодорожного транспорта, содержащая, по меньшей мере, две радиочастотные метки на каждом участке пути, где необходима остановка, установленные на известных местах железнодорожного пути, и устройство управления, второй вход которого соединен с выходом радиочастотного считывателя, отличающаяся тем, что она снабжена дополнительными радиочастотными метками, установленными по пути следования железнодорожного транспортного средства по обеим сторонам железнодорожного пути со сдвигом друг относительно друга, и пунктом сбора и обработки информации, при этом радиочастотный считыватель выполнен в виде последовательно включенных устройства управления радиочастотным считывателем, задающего генератора, первого усилителя мощности, первого циркулятора, вход-выход которого связан с первой приемопередающей антенной, первого полосового фильтра, первого удвоителя фазы, первого делителя фазы на два, первого узкополосного фильтра и первого фазового детектора, второй вход которого соединен с выходом первого полосового фильтра, а выход подключен к входу устройства управления радиочастотным считывателем, последовательно подключенных к выходу задающего генератора первого преобразователя частоты, второго усилителя мощности, второго циркулятора, вход-выход которого связан со второй приемопередающей антенной, второго полосового фильтра, второго удвоителя фазы, второго делителя фазы на два, второго узкополосного фильтра, второго фазового детектора, второй вход которого соединен с выходом второго полосового фильтра, сумматора, фазового манипулятора, второй вход которого соединен с выходом генератора высокочастотных колебаний, четвертого усилителя мощности и передающей антенны, последовательно подключенных к выходу задающего генератора второго преобразователя частоты, третьего усилителя мощности, третьего циркулятора, вход-выход которого связан с третьей приемопередающей антенной, третьего полосового фильтра, третьего удвоителя фазы, третьего делителя фазы на два, третьего узкополосного фильтра и третьего фазового детектора, второй вход которого соединен с выходом третьего полосового фильтра, а выход подключен к второму входу сумматора, последовательно подключенных к выходу второго полосового фильтра первого блока регулируемой задержки, первого перемножителя, второй вход которого соединен с выходом третьего полосового фильтра, первого фильтра нижних частот, первого экстремального регулятора, первого блока регулируемой задержки, блока определения направления движения, первого аналого-цифрового преобразователя и первой линии задержки, выход которой подключен к третьему входу сумматора, последовательно подключенных к выходу третьего полосового фильтра второго блока регулируемой задержки, второго перемножителя, второй вход которого соединен с выходом второго полосового фильтра, второго фильтра нижних частот, второго экстремального регулятора, второго блока регулируемой задержки, блока расчета текущей скорости, второй вход которого соединен с выходом первого блока регулируемой задержки, второго аналого-цифрового преобразователя и второй линии задержки, выход которой соединен с четвертым входом сумматора, последовательно подключенных к выходу блока расчета текущей скорости интегратора, третьего аналого-цифрового преобразователя и третьей линии задержки, выход которой соединен с пятым входом сумматора, второй вход блока определения направления движения соединен с выходом второго блока регулируемой задержки, причем первая приемопередающая антенна считывателя установлена на днище железнодорожного транспортного средства, вторая и третья приемопередающие антенны установлены слева и справа на кабине машиниста соответственно, а передающая антенна установлена сверху на кабине машиниста, пункт сбора и обработки информации выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, смесителя, второй вход которого через гетеродин соединен с выходом блока поиска, усилителя промежуточной частоты, удвоителя фазы, второго анализатора спектра, блока сравнения, второй вход которого через первый анализатор спектра соединен с выходом усилителя промежуточной частоты, порогового блока, второй вход которого через линию задержки соединен с его выходом, ключа, второй вход которого соединен с выходом усилителя промежуточной частоты, фазового детектора и компьютера, последовательно подключенных к выходу удвоителя фазы делителя фазы на два и узкополосного фильтра, выход которого соединен с вторым входом фазового детектора, при этом вход блока поиска соединен с выходом порогового блока, каждая радиочастотная метка выполнена в виде пьезокристалла с нанесенными на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, при этом встречно-штыревой преобразователь содержит две гребенчатые системы электродов, электроды каждой из гребенок соединены друг с другом шинами, связанными с микрополосковой антенной.
| СПОСОБ АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ПОДВИЖНОГО СОСТАВА НА МНОГОПУТНЫХ УЧАСТКАХ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2314956C2 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА ЖЕЛЕЗНОДОРОЖНЫМИ ВАГОНАМИ | 2005 |
|
RU2380261C2 |
| KR 100985780 B1, 06.10.2010 | |||
| KR 20100083051 A, 21.07.2010 | |||
| WO 2008147425 A1, 04.12.2008. | |||

