Предлагаемая система относится к автоматизированным системам опознавания подвижных транспортных средств, контроля и управления их движением и может быть использована, в частности, для диспетчерского контроля и управления инкассаторскими машинами.
Известны системы диспетчерского контроля и управления наземным транспортом (авт. свид. СССР №№642.759, 842.920, 849.257, 864.318, 924.735, 929.348, 1.070.594, 1.070.595, 1.196.629, 1.170.478, 1.647.615, 1.693.620, 1.751.795, 1.755.310, 1.780.080; патенты РФ №№2.032.220, 2.053.561, 2.056.062, 2.058.592, 2.060.513, 2.066.458, 2.082.279, 2.113.013, 2.122.239. 2.303.293; патенты США №4.023.163, 4.388.622, 4.504.482, 5.648.770; патенты Великобритании №№1.267.040, 2.279.792, 2.279.478; патенты Франции №2.038.386, 2.199.151, 2.415.840; патент ФРГ №1.623.427; патенты Японии №№50-59.431, 50-66.595; Дикарев В.И. и др. Защита транспортных средств и грузов от угона и краж. СПб., 2004, с.103-149, 182-240, и другие).
Из известных систем наиболее близкой к предлагаемой является «Система диспетчерского контроля и управления инкассаторскими машинами» (патент РФ №2.303.293, G08G 1/01, 2005), которая и выбрана в качестве прототипа.
Указанная система содержит центральный диспетчерский пункт, подвижные единицы и контрольные пункты, на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов и микроконтроллер, на центральном диспетчерском пункте установлены двухканальный приемопередатчик, адаптер каналов связи, цифроаналоговый преобразователь, блок ввода-вывода речи и аналого-цифровой преобразователь, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров и вспомогательного персонала, на подвижной единице установлены двухканальный приемопередатчик, блок управления, цифроаналоговый преобразователь, аналого-цифровой преобразователь, блок ввода-вывода речи и пульт управления и индикации.
Указанная система обеспечивает также возможность для обмена конфиденциальной дискретной информацией между центральным диспетчерским пунктом и инкассаторскими машинами и ее защиту от несанкционированного доступа посторонних лиц, в том числе и преступных элементов. Последние постоянно проявляют повышенный интерес к радиоканалам, которые используются для диспетчерского контроля и управления инкассаторскими машинами.
К сожалению, в последние годы среди преступных элементов иногда оказывались и сами сотрудники инкассации, которые покушались на жизнь своих коллег и изменяли маршрут движения инкассаторских машин.
Технической задачей изобретения является повышение надежности защиты инкассаторских машин от преступных элементов путем своевременного автоматического обнаружения нарушения установленного графика и маршрута их движения.
Поставленная задача решается тем, что система диспетчерского контроля и управления инкассаторскими машинами, содержащая в соответствии с ближайшим аналогом центральный диспетчерский пункт с двухканальным приемопередатчиком, соединенный портом ввода-вывода с двухканальным приемопередатчиком, адаптер каналов связи, последовательно соединенные цифроаналоговый преобразователь, блок ввода и вывода речи и аналого-цифровой преобразователь, выходы которого подключены к группе входов адаптера каналов связи, первая группа выходов которого соединена с входами цифроаналогового преобразователя, а вторая группа выходов - с управляющими входами блока ввода-вывода речи, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров и вспомогательного персонала, инкассаторские машины, на каждой из которых установлены двухканальный приемопередатчик, соединенный с блоком управления, цифроаналоговый преобразователь, индикатор отклонения от графика и блок ввода-вывода речи, подключенный к группе входов блок управления, аналого-цифровой преобразователь и соединенный с одним из портов ввода-вывода блока управления пульт управления и индикации с индикатором нахождения инкассаторской машины в зоне действия контрольного пункта, индикатором вызова водителя на речевую связь с центральным диспетчерским пунктом, индикатором успешного обмена информацией и органами ввода дискретной информации, к первой группе выходов блока управления подключены входы цифроаналогового преобразователя, выходом соединенного с информационным входом блока ввода-вывода речи, управляющие выходы которого подключены ко второй группе входов блока управления, а выход - к входу аналого-цифрового преобразователя, и контрольные пункты, на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов, соединенные с микропроцессором, на каждой инкассаторской машине введены последовательно включенные приемник сигналов GPS и микропроцессор, соединенные с блоком управления, при этом вход-выход микропроцессора подключен к приемопередатчику, на центральном диспетчерском пункте введены последовательно включенные приемник сигналов GPS и микроЭВМ, соединенные с адаптером каналов связи, при этом вход-выход микроЭВМ подключен к приемопередатчику дальнего радиоканала, каждый приемопередатчик выполнен в виде источника дискретных сообщений и последовательно включенных цифрового скремблера, фазового манипулятора, второй вход которого соединен с выходом опорного генератора, первого смесителя, второй вход которого через первый гетеродин соединен с первым выходом эталона времени и частоты, усилителя первой промежуточной частоты и первого усилителя мощности, последовательно включенных дуплексера, вход-выход которого соединен с приемопередающей антенной, второго усилителя мощности, первого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с выходом второго усилителя мощности, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, второго смесителя, второй вход которого через второй гетеродин соединен со вторым выходом эталона времени и частоты, первого усилителя второй промежуточной частоты, четвертого сумматора, первого перемножителя, второй вход которого соединен с выходом третьего сумматора, второго узкополосного фильтра, амплитудного детектора, первого ключа, второй вход которого соединен с выходом четвертого сумматора, удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом первого ключа, порогового блока, второго ключа, второй вход которого соединен с выходом первого ключа, второго перемножителя, второй вход которого соединен со вторым выходом второго гетеродина, третьего полосового фильтра, фазового детектора, второй вход которого соединен с выходом первого гетеродина, и цифрового десклемблера, выход которого является выходом приемопередатчика, при этом к второму выходу второго гетеродина последовательно подключены фазовращатель на +90°, третий смеситель, второй вход которого соединен с выходом третьего сумматора, второй усилитель второй промежуточной частоты и фазовращатель на -90°, выход которого соединен со вторым входом четвертого сумматора, в приемопередатчиках инкассаторских машин и центрального диспетчерского пункта источник дискретных сообщений подключен к цифровому скремблеру, первый усилитель мощности подключен к дуплексеру, отличается от ближайшего аналога тем, что приемопередатчики контрольных пунктов снабжены пятым и шестым сумматорами, четвертым смесителем, усилителем третьей промежуточной частоты, четвертым полосовым фильтром, вторым фазовым детектором и линией задержки, причем к выходу опорного генератора последовательно подключены четвертый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель третьей промежуточной частоты и пятый сумматор, второй вход которого соединен с выходом первого усилителя мощности, а выход подключен к дуплексеру, к выходу второго усилителя мощности последовательно подключены четвертый полосовой фильтр, второй фазовый детектор, второй вход которого соединен с выходом усилителя третьей промежуточной частоты, линия задержки и шестой сумматор, второй вход которого соединен с выходом источника дискретных сообщений, а выход подключен к входу цифрового скремблера, инкассаторские машины снабжены радиочастотными метками, представляющими собой пьезокристалл с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн, состоящим из двух гребенчатых систем электродов, соединенных между собой шинами, связанными с микрополосковой приемопередающей антенной, и набора отражателей.
Сущность предлагаемой системы диспетчерского контроля и управления инкассаторскими машинами поясняется чертежами, где на фиг.1 изображена структурная схема системы; на фиг.2 - возможный вариант оформления панели пульта управления и индикации инкассаторской машины; на фиг.3 - пример структурной организации информационной посылки; на фиг.4 - структурная схема каждого приемопередатчика инкассаторских машин и центрального диспетчерского пункта; на фиг.5, 6, 7 - частотные диаграммы, поясняющие работу радиоканалов и преобразование сигналов по частоте; на фиг.8 - структурная схема каждого приемопередатчика контрольных пунктов; на фиг.9 - функциональная схема радиочастотной метки.
Система диспетчерского контроля и управления инкассаторскими машинами (фиг.1) содержит на инкассаторской машине ИМ приемник 1.1 сигналов GPS, микропроцессор 1.2, приемопередатчик 1, пульт 2 управления и индикации, блок 3 управления, выполненный на микроконтроллере, цифроаналоговый преобразователь 4, аналого-цифровой преобразователь 5 и блок 6 ввода-вывода речи, содержащий, например, громкоговоритель и микрофон или телефонную трубку с датчиком трубкодержателя; на контрольном пункте КП - приемопередатчик 7 ближнего радиоканала, микроконтроллер 8 и приемопередатчик 9 дальнего радиоканала; на центральном диспетчерском пункте ЦДП - приемник 10.1 сигналов GPS, микроЭВМ 10.2, приемопередатчик 10 дальнего радиоканала, адаптер 11 каналов связи, файл-сервер 12, аналого-цифровой преобразователь 13, цифроаналоговый преобразователь 14, блок 15 ввода-вывода речи, автоматизированные рабочие места диспетчеров 16.1…16.n и вспомогательного персонала 17.1…17.К.
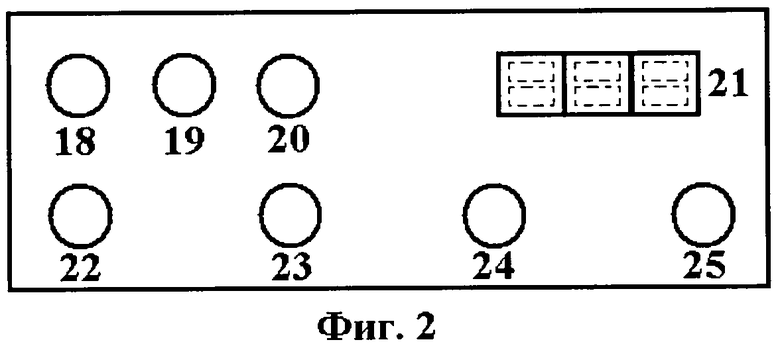
На панель пульта управления и индикации инкассаторской машины ИМ (фиг.2) выведены индикаторы нахождения в зоне контрольного пункта 18, вызова от диспетчера на речевую связь 19, усиленного обмена информацией 20 и времени отклонения от графика 21, а также органы ввода дискретной информации, например кнопки о нападении 22, об аварии 23, о вызове диспетчера на речевую связь 24 и об окончании сеанса связи («Ответ») 25.
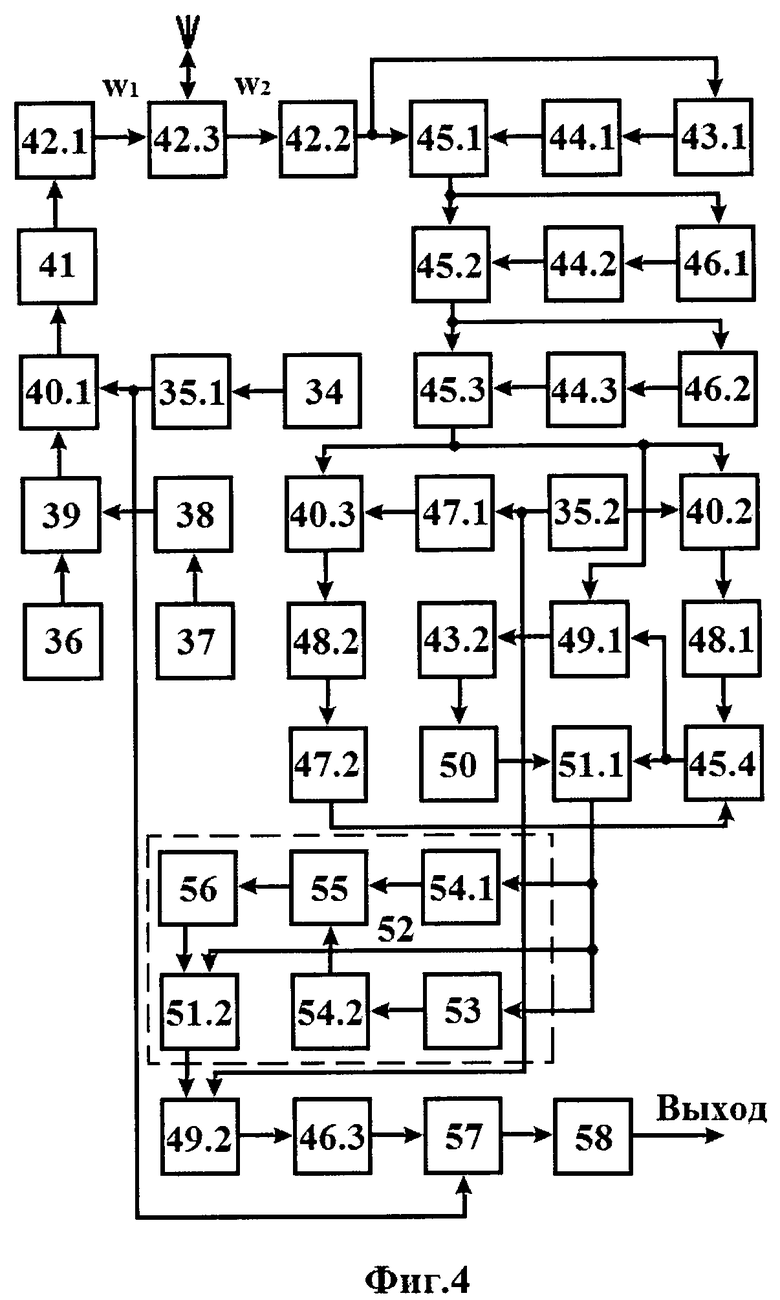
Каждый приемопередатчик (фиг.4) инкассаторских машин и центрального диспетчерского пункта содержит последовательно включенные источник 37 дискретных сообщений, цифровой скремблер 38, фазовый манипулятор 39, второй вход которого соединен с выходом опорного генератора 36, первый смеситель 40.1, второй вход которого через первый гетеродин 35.1 соединен с первым выходом эталона 34 времени и частоты, усилитель первой промежуточной частоты 41, первый усилитель 42.1 мощности, дуплексер 42.3, вход-выход которого соединен с приемопередающей антенной, второй усилитель 42.2 мощности, первый узкополосный фильтр 43.1, первый фазоинвертор 44.1, первый сумматор 45.1. второй вход которого соединен с выходом усилителя 42.2 мощности, первый полосовой фильтр 46.1, второй фазоинвертор 44.2, второй сумматор 45.2. второй вход которого соединен с выходом первого сумматора 45.1, второй полосовой фильтр 46.2, третий фазоинвертор 44.3, третий сумматор 45.3. второй вход которого соединен с выходом сумматора 45.2, второй смеситель 40.2, второй вход которого через второй гетеродин 35.2 соединен со вторым выходом эталона 34 времени и частоты, первый усилитель 48.1 второй промежуточной частоты, четвертый сумматор 45.4, первый перемножитель 49.1, второй вход которого соединен с выходом сумматора 45.3, второй узкополосный фильтр 43.2, амплитудный детектор 50, первый ключ 51.1, второй вход которого соединен с выходом сумматора 45.4, удвоитель 53 фазы, второй измеритель 54.2 ширины спектра, блок 55 сравнения, второй вход которого через первый измеритель 54.1 ширины спектра соединен с выходом ключа 51.1, пороговый блок 56, второй ключ 51.2, второй вход которого соединен с выходом ключа 51.1, второй перемножитель 49.2, второй вход которого соединен с выходом гетеродина 35.2, третий полосовой фильтр 46.3, фазовый детектор 57, второй вход которого соединен с выходом гетеродина 35.1, и цифровой десклемблер 58, выход которого является выходом приемопередатчика. Ко второму выходу гетеродина 35.2 последовательно подключены фазовращатель 47.1 на +90°, третий смеситель 40.3, второй вход которого соединен с выходом сумматора 45.3, второй усилитель 48.2 второй промежуточной частоты и фазовращатель 47.2 на -90°, выход которого соединен со вторым входом сумматора 45.4.
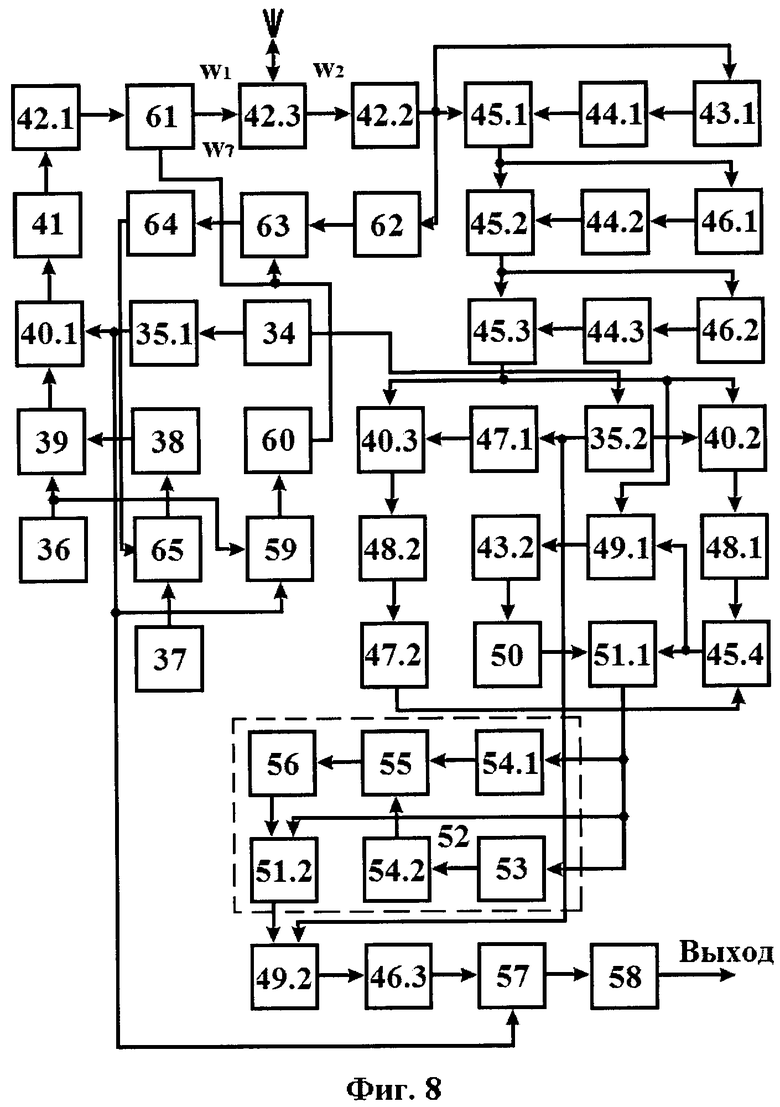
Удвоитель 53 фазы, измерители 54.1 и 54.2 ширины спектра, блок 55 сравнения, пороговый блок 56 и ключ 51.2 образуют структурный селектор 52. Каждый приемопередатчик (фиг.8) контрольных пунктов, кроме того, содержит четвертый смеситель 59, усилитель 60 третьей промежуточной частоты, пятый 61 и шестой 65 сумматоры, четвертый полосовой фильтр 62, второй фазовый детектор 63 и линию 64 задержки, причем к выходу опорного генератора 36 последовательно подключены четвертый смеситель 59, второй вход которого соединен с выходом первого гетеродина 35.1, усилитель 60 третьей промежуточной частоты и пятый сумматор 61, второй вход которого соединен с выходом первого усилителя 42.1 мощности, а выход подключен к дуплексеру 42.3, к выходу второго усилителя 42.2 мощности последовательно подключены четвертый полосовой фильтр 62, второй фазовый детектор 63, второй вход которого соединен с выходом усилителя 60 третьей промежуточной частоты, линия 64 задержки и шестой сумматор 6, второй вход которого соединен с выходом источника 37 дискретных сообщений, а выход подключен ко входу цифрового скремблера 38.
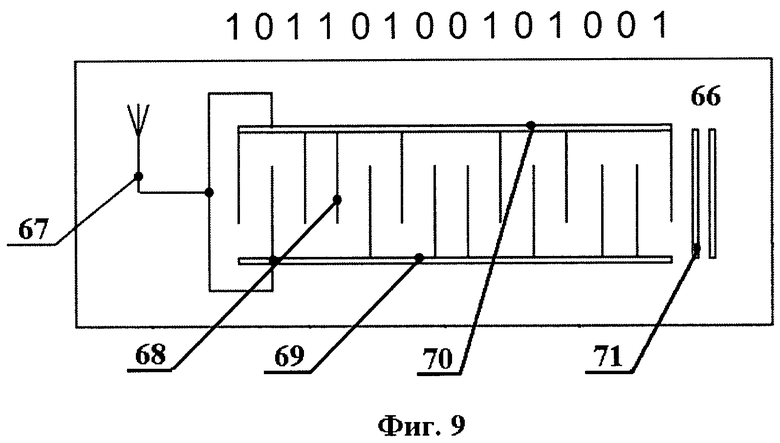
Каждая радиочастотная метка (фиг.9) представляет собой пьезокристалл 66 с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем (ВШП) поверхностных акустических волн (ПАВ), состоящим из двух гребенчатых систем электродов 68, соединенных между собой шинами 69 и 70, связанными с микрополосковой приемопередающей антенной 67, и набора отражателей 71.
Система работает следующим образом.
При включении аппаратуры центрального диспетчерского пункта с рабочих мест вспомогательного персонала (программистов-операторов) 17.1…17.К производится первичная установка параметров системы: занесение в память файл-сервера номеров контрольных пунктов, инкассаторских машин, маршрутов, номеров нарядов в маршрутах и графиков движения (времени прохождения каждого контрольного пункта маршрута) для каждой инкассаторской машины.
Центральный диспетчерский пункт работает параллельно и независимо в двух режимах - автоматическом и диспетчерского управления.
В автоматическом режиме приемопередатчик 10 дальнего канала на ЦДП под управлением адаптера 11 каналов связи непрерывно производит циклический опрос всех контрольных пунктов, прием информации о параметрах движения по маршрутам инкассаторских машин и их техническом состоянии, а включенные в локальную вычислительную сеть файл-сервер 12 и компьютеры автоматизированных рабочих мест диспетчеров 16.1…16.n - обработку, хранение, отображение полученной информации и корректировку графиков движения на основе анализа статистических данных.
Каждый контрольный пункт является активным ретранслятором с накоплением информации. Приемопередатчик 7 ближнего радиоканала контрольного пункта под управлением микроконтроллера 8 непрерывно производит циклическое сканирование в зоне контроля и поочередный опрос всех инкассаторских машин, находящихся в зоне контроля. Приемопередатчик 1 ИМ включен на прием по первому каналу и передает информацию только по запросу контрольного пункта или диспетчера через посредство КП. При совпадении кода ИМ, находящейся в зоне контроля КП, о чем свидетельствует включенное состояние индикатора 18 нахождения ИМ в зоне КП на панели пульта 2 управления и индикации ИМ, с кодом запроса приемопередатчик 1 ИМ под управлением блока 3 управления передает по второму каналу на КП телеметрическую информацию о параметрах движения ИМ (например, номер ИМ, номер маршрута, номер наряда в маршруте, номер пройденного последним контрольного пункта и не менее двух номеров предыдущих контрольных пунктов для определения направления движения, признаки наличия или отсутствия аварии или нападения, вызова диспетчера водителем ИМ и окончания сеанса речевой связи), техническом состоянии ИМ (например, загрузка, средний расход топлива, средняя скорость движения по участкам, максимальная скорость, возникшие неисправности и т.д.).
Приемопередатчик 7 ближнего радиоканала КП принимает информацию с ИМ, микроконтроллер 8 кодирует ее индивидуальным для данного КП кодом, а приемопередатчик 9 дальнего радиоканала КП передает эту информацию на ЦДП. Приемопередатчик 10 дальнего радиоканала ЦДП принимает информационную посылку, адаптер 11 каналов связи преобразует ее и передает в файл-сервер 12, который обрабатывает полученную информацию, вычисляет отклонение фактического времени прибытия на КП от планового, затем информация об отклонении от графика вместе с сигналом об успешном обмене информацией (сигнал квитирования) преобразуется адаптером 11 каналов связи и передается передатчиком 10 дальнего радиоканала на ИМ через КП, в результате чего на панели пульта 2 управления и индикации ИМ индикатором 21 высвечивается величина отклонения фактического времени прибытия на КП от планового и включает индикатор 20 успешного обмена информацией между ИМ и ЦДП. После этого опрос зоны контроля КП продолжается в порядке возрастания номеров ИМ. Если в зоне КП находится несколько ИМ, то опрос ИМ осуществляется в порядке возрастания их номеров. Поскольку ответные сообщения формируются только после получения запроса по своему номеру, исключается возможность одновременного излучения сигналов с нескольких ИМ и тем самым исключается возможность сбоев, вызванных наложением информации. Если в зоне КП нет ни одной ИМ, происходит непрерывный последовательный цикл формирования и излучения запросных сообщений с последующим повторением этих циклов.
Аппаратура ближнего радиоканала имеет радиус действия около 100 м. Это позволяет использовать передатчик малой мощности, что снижает себестоимость системы и обеспечивает соблюдение санитарных норм на радиоизлучения. Кроме того, увеличение радиуса действия передатчиков, а следовательно, и зоны контроля КП привело бы к снижению точности определения местоположения ИМ. Указанная величина зоны контроля достаточна для нахождения в ней нескольких ИМ одновременно и не требует точной остановки в определенной точке и точной ориентации ИМ.
Информационные посылки передаются помехозащищенным кодом с обнаружением и исправлением ошибок, что позволяет существенно повысить помехозащищенность передаваемой информации. После успешного приема информации на ЦДП в ответном сообщении посылается на ИМ сигнал квитирования. При отсутствии сигнала квитирования с ИМ посылается повторный запрос. При длительном отсутствии сигнала квитирования делается вывод о неисправности аппаратуры КП или ИМ, о чем сигнализируется диспетчеру для принятия мер по устранению нарушений работы системы.
В режиме диспетчерского управления, осуществляемом параллельно и независимо с автоматическим, диспетчер при помощи автоматизированных рабочих мест диспетчеров 16.1-16.n вызывает на речевую связь водителя любой ИМ либо всех водителей, находящихся в зоне действия определенного КП, либо - при циркулярном вызове - всех водителей для изменения графика движения, маршрута, количества машин на маршруте в зависимости от различных форс-мажорных обстоятельств, при изменении погодных условий (например, уменьшение скорости при гололеде, дожде и т.п.), дорожной ситуации (например, ремонт дороги, дорожно-транспортное происшествие и т.п.), выводит при необходимости промежуточные данные по любой ИМ.
При вызове водителей, находящихся в зоне действия определенного КП, диспетчер набирает на клавиатуре автоматизированного места 16.i номер КП, посылая сигнал вызова нескольким водителям. Их приемопередатчики настраиваются на прием и водитель (охранник) ожидает речевого сообщения диспетчера. При циркулярном вызове всех водителей сообщение диспетчера преобразуется аналого-цифровым преобразователем 13 и записывается в память файл-сервера; для тех водителей, которые находятся в зонах действия контрольных пунктов, идет сигнал вызова на речевую связь, их приемопередатчики переходят в режим приема и принимают сообщения диспетчера. Для водителей ИМ, находящихся в момент передачи циркулярного сообщения между КП, после их прибытия и опознавания в зоне действия какого-либо КП передается сигнал вызова на речевую связь, устанавливающий их приемопередатчики в режим приема, из памяти файл-сервера 12 извлекается сообщение, преобразуется адаптером 11 каналов связи в помехозащищенный код с обнаружением и исправлением ошибок и передается приемопередатчиком 10 дальнего радиоканала в состав информационных посылок на эти ИМ через посредство КП.
При вызове водителя определенной ИМ на речевую связь диспетчер на пульте автоматизированного рабочего места 16.i набирает номер, необходимый ИМ, и в составе информационной посылки передает сигнал вызова через КП, в зоне действия которого находится эта ИМ. Приемопередатчик 1 настраивается в режиме приема, на пульте 2 управления и индикации загорается индикатор 19 вызова от диспетчера и звучит сигнал вызова. Водитель ИМ, в состав блока ввода-вывода которой входит телефонная трубка, должен взять трубку. Если блок 6 ввода-вывода речи ИМ оборудован громкоговорителем и микрофоном, под действием блока 3 управления цифроаналоговый преобразователь 4 подключается через усилитель к громкоговорителю. Диспетчер с помощью блока 15 ввода-вывода речи передает сообщение водителю. При этом аналого-цифровым преобразователем 13 речь преобразуется адаптером 11 в помехозащищенный код с обнаружением и исправлением ошибок (например, код Рида-Соломона), который излучается приемопередатчиком 10 дальнего радиоканала ЦДП, принимается передатчиком 9 дальнего радиоканала КП, преобразуется микроконтроллером 8 КП, излучается приемопередатчиком 7 ближнего радиоканала КП, принимается приемопередатчиком 1 инкассаторской машины с заданным номером (если код ее номера совпадает с переданным в сообщении номером), преобразуется под действием блока 3 управления ИМ цифроаналоговым преобразователем 4 и поступает в блок 6 ввода-вывода речи ИМ. Водитель слышит сообщение диспетчера. Если водителю необходимо связаться с диспетчером, водитель нажимает кнопку 21 вызова диспетчера, что фиксируется блоком 3 управления, и в составе телеметрической части информационной посылки (фиг.3) передается на ЦДП через КП, в зоне действия которого находится ИМ. Диспетчер получает сигнал вызова и разрешает речевую связь. Водитель говорит в микрофон или телефонную трубку блока 6 ввода-вывода речи, аналого-цифровой преобразователь 5 преобразует сигнал в цифровую форму и под воздействием блока 3 управления приемопередатчик 1 передает речевое сообщение водителя в составе информационных посылок на ЦДП через КП, в зоне действия которого находится ИМ. Принятое приемопередатчиком 10 сообщение декодируется адаптером 11, преобразуется цифроаналоговым преобразователем 14 и поступает в блок 15 ввода-вывода речи на ЦДП. По окончании сеанса связи водитель нажимает кнопку 25 на пульте 2 управления и индикации ИМ.
При возникновении нештатных ситуаций (нападение на инкассаторскую машину или аварийная ситуация) водитель ИМ нажимает на панели 2 управления и индикации соответствующую кнопку (для сигнализации об аварийной ситуации - кнопку 22, для сигнализации о нападении - кнопку 23) и его вызов через КП, в зоне действия которого он находится, ретранслируется на ЦДП. Сигнал передается многократно, для того чтобы он мог быть принят с большей вероятностью. Для устойчивого приема из любой точки маршрута (даже вне зоны действия КП), а также вне маршрута сигналов об аварийной ситуации или нападении на водителя предусмотрено кратковременное повышение мощности передатчика.
Обмен информацией между ИМ и КП, между КП и ЦДП, между ЦДП и ИМ (фиг.1) ведется по радиоканалу. Организовано два канала передачи информации: прямой - от ЦДП к КП и далее от КП к ИМ, и обратный - от ИМ к КП и далее к ЦДП. Все сигналы, в том числе и речевые, передаются в цифровой форме помехозащищенным кодом с временным уплотнением старт-стопными посылками с частотой повторения, равной частоте дискретизации речевого сигнала. Информационная посылка содержит (фиг.3):
- стартовую посылку 26;
- адрес речевой посылки 27;
- признак речевой посылки 28;
- собственно речевую посылку 29;
- адрес телеметрической посылки 31;
- собственно телеметрическую посылку 32;
- стоповую посылку 33.
В составе телеметрической посылки с ИМ на ЦДП передается, например, код номера наряда в маршруте, признаки наличия или отсутствия вызова диспетчера на речевую связь, нападения, аварии, окончания сеанса связи, возникшие неисправности. В составе телеметрической посылки с ЦДП на ИМ передается, например, код номера КП, номера ИМ, отклонение от графика, наличие или отсутствие признака вызова на речевую связь, успешного обмена информацией. Период передачи Т обратно пропорционален частоте дискретизации речевого сигнала. Речевой канал является дуплексным. Информационная емкость системы - 100 КП и 1000 ИМ с возможностью увеличения.
Для точного определения местоположения инкассаторских машин в реальном времени используется спутниковая навигационная система GPS или «Глонасс».
Глобальная навигационная система GPS (Global Positioning System), известная также как Navstar (Navigation System with Time and Ranging - Национальная система определения времени и дальности), предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира. Система используется для решения как военных, так и гражданских навигационных задач.
Российская спутниковая навигационная система аналогичного назначения, известная под названием «Глонасс» (Глобальная навигационная спутниковая система), применяется для предоставления навигационных услуг различным категориям потребителей без каких-либо ограничений.
Системы GPS и «Глонасс» имеют сходную архитектуру. В их состав входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и пользовательский сегмент (навигационные приемники).
Каждый GPS-спутник излучает на двух частотах (L1 и L2) специальный навигационный сигнал в виде бинарного фазоманипулированного сигнала. В сигнале зашифровываются два вида кода. Один из них - код С/А - доступен широкому кругу потребителей. Он позволяет получать лишь приблизительную оценку местоположения, поэтому называется «грубым» кодом. Передача кода С/А осуществляется на частоте L1 с использованием фазовой манипуляции псевдослучайной последовательностью длиной 1023 символа. Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А-кода - 1 мс. Тактовая частота - 1,023 МГц.
Другой код - Р - обеспечивает более точное вычисление координат, но пользоваться им способны не все; доступ к нему ограничивается провайдером услуг GPS. В основном Р-код предоставляется военным и федеральным службам США. Этот код передается на частоте L2 с применением сверхдлинной псевдослучайной последовательности с периодом повторения 267 дней. Тактовая частота - 10,23 МГц.
Координаты инкассаторской машины определяются с помощью стандартного навигационного приемника 1.1 сигналов GPS. Захватив сигнал, навигационный приемник 1.1 направляет его в микропроцессор 1.2, который автоматически вычисляет координаты инкассаторской машины. Погрешность вычисления координат не более 100 м.
Для повышения точности определения местонахождения инкассаторских машин используется принцип дифференциальных навигационных измерений.
Дифференциальный режим позволяет установить координаты каждой инкассаторской машины с точностью до 5 м в динамической навигационной обстановке и до 2 м - в стационарных условиях. Дифференциальный режим реализуется с помощью приемника 10.1 сигналов GPS, расположенного на центральном диспетчерском пункте с известными геодезическими координатами. Сравнивая известные координаты, полученные в результате прецизионной геодезической съемки, с измеренными, микроЭВМ 10.2 вырабатывает поправки, которые передаются инкассаторским машинам по радиоканалу в заранее оговоренном формате. Приемопередатчик 1 позволяет получать дифференциальные поправки с центрального диспетчерского пункта. Поправки, принятые от ЦДП, автоматически вносятся в результаты собственных измерений с помощью приемника 10.1 сигналов GPS.
Для каждого КА, сигналы которого поступают на приемник 10.1, поправка, полученная от ЦДП, складывается в микропроцессоре 1.2 с результатом измерения псевдодальности. Вычисленная поправка Д2 определяется в виде
ΔΣ=ΔR+ΔV(T-ΔT),
где ΔR - поправка псевдодальности;
ΔV - поправка псевдоскорости (скорости изменения поправки);
Т - время измерения приемником 1.1 сигналов GPS;
ΔT - временная привязка поправки.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между ИМ и ЦДП. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними по отношению к приемнику причинами, что характерно обычно для системы GPS.
Погрешности С/А и «уходы» шкалы времени компенсируются в дифференциальном режиме полностью. Погрешности вследствие задержки сигналов в атмосфере зависят от идентичности условий прохождения сигналов к ЦДП и ИМ, а следовательно, от расстояния между ними. Эти погрешности компенсируются лишь при близком расположении ЦДП и ИМ. Эфемероидная погрешность также лучше всего компенсируется при небольшом удалении ИМ от ЦДП.
На центральном диспетчерском пункте монтируется рабочее место диспетчера для визуального отображения на компьютерной карте местности текущего положения инкассаторских машин и обмена сообщениями с ними. С одного рабочего места диспетчера можно вести наблюдение одновременно за несколькими инкассаторскими машинами. Инкассаторские машины оснащаются бортовым приемником 1.1 и микропроцессором 1.2, позволяющим по запросу диспетчера в автоматическом режиме передавать собственные координаты на компьютер центрального пульта ЦДП.
В случае опасности (например, нападение на инкассаторскую машину или аварийная ситуация) водитель инкассаторской машины нажимает на панели 2 управления и индикации соответствующую кнопку. На центральном пульте немедленно отображается текстовая информация о ИМ, подавшей сигнал тревоги, и о том, какой характер помощи требуется, а на электронной карте на мониторе диспетчер может наблюдать текущее положение ИМ в виде условного значка. При получении сигнала тревоги оператор и водитель ИМ могут обмениваться текстовыми сообщениями и поговорить друг с другом по телефону, причем голосовая связь и передача цифровых данных о ИМ осуществляются по одному и тому же каналу.
В перерывах между сеансами связи бортовой микропроцессор 1.2 накапливает текущие координаты в своей памяти, выполняя роль «черного ящика», который может сдаваться диспетчеру для анализа маршрута по окончании работы. При возобновлении связи с диспетчером сначала передаются накопленные координаты, а затем текущие, что исключает «разрывы» в маршруте, отображаемом на электронной карте на диспетчерском пункте.
Каждый приемопередатчик инкассаторских машин работает следующим образом.
Опорным генератором 36 формируется напряжение высокой частоты
uc(t)=Uc·Cos(wct+φс), 0≤t≤Tc,
где Uc, wc, φс, Tc - амплитуда, несущая частота, начальная фаза и длительность сигнала;
которое поступает на второй вход фазового манипулятора 39, на первый вход которого подается модулирующий код M1(t) с выхода цифрового скремблера 38. Вход последнего соединен с источником 37 дискретных сообщений. На выходе фазового манипулятора 39 образуется фазоманипулированный (ФМн) сигнал.
u1(t)=Uc·Cos[wct+φк1(t)+φс], 0≤t≤Tc,
где φк1(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φк1(t)=const при Kτэ1<t<(K+1)τэ и может изменяться скачком при t=Kτэ1, т.е. на границах между элементарными посылками (K=1, 2,…, N1-1);
τэ1, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Tc=N·τэ1).
Этот сигнал поступает на первый вход смесителя 40.1, на второй вход которого подается напряжение первого гетеродина 35.1, стабилизированного эталоном 1 частоты и времени
uг1(t)=Uг1·Cos(wг1t+φг1).
На выходе смесителя 40.1 образуются напряжения комбинационных частот. Усилителем 41 выделяется напряжение суммарной (первой промежуточной) частоты
uпр1(t)=Uпр1·Cos[wпр1t+φк1(t)+φпр1], 0≤t≤Тс,
где  ;
;
K1- коэффициент передачи смесителя;
wпр1=wc+wг1 - первая промежуточная частота;
φпр1=φс+φг1,
которое усиливается в усилителе 42.1 мощности и излучается через дуплексер 43 и антенну в эфир на частоте w1=wпр1.
При этом цифровой скремблер 38 реализует криптографический метод защиты конфиденциальной дискретной информации.
Криптографические методы защиты информации - это специальные методы шифрования, кодирования и преобразования информации, в результате которых ее содержание становится недоступным посторонним лицам, в том числе и преступным элементам, без предъявления ключа криптограммы и обратного преобразования.
При цифровом способе закрытия передаваемого сообщения можно условно выделить четыре основных группы:
1) подстановка - символы дискретного сообщения заменяются другими символами в соответствии с заранее определенным правилом;
2) перестановка - символы дискретного сообщения переставляются по некоторому правилу в пределах заданного блока передаваемого дискретного сообщения;
3) аналитическое преобразование - шифруемое сообщение преобразуется по некоторому аналитическому правилу;
4) комбинированное преобразование - исходное дискретное сообщение шифруется двумя или большим числом способов шифрования.
Принимаемый ФМн-сигнал
u2(t)=U2·Cos[w2t+φк2(t)+φ2], 0≤t≤Т2,
с выхода приемопередающей антенны через дуплексер 42.3, усилитель 42.2 мощности и сумматоры 45.1, 45.2, 45.3, у которых работает только одно плечо, поступает на первые входы смесителей 40.2 и 40.3, на вторые входы которого подается напряжение второго гетеродина 35.2:
uг2(t)=Uг2·Cos(wг2t+φг2);
uг2'(t)=Uг2·Cos(wг2t+φг2+90°).
На выходах смесителей 40.2 и 40.3 образуются напряжения комбинационных частот. Усилителями 48.1 и 48.2 выделяются напряжения разностной (второй промежуточной) частоты:
uпр2(t)=Uпр2·Cos[wпр2t+φк2(t)+φпр2],
uпр3(t)=Uпр2·Cos[wпр2t+φк2(t)+φпр2+90°], 0≤t≤Т2,
где  ;
;
wпр2=wг2-w2 - вторая промежуточная частота (фиг.5);
φпр2=φг2-φ2.
Напряжение uпр3(t) с выхода усилителя 48.2 второй промежуточной частоты поступает на вход фазовращателя 47.2 на -90°, на выходе которого образуется напряжение
uпр4(t)=Uпр2·Cos[wпр2t+φк2(t)+φпр2+90°-90°]=Uпр2·Cos[wпр2t+φк2(t)+φпр2], 0≤t≤T2.
Напряжение uпр2(t) и uпр4(t) поступают на два входа сумматора 45.4, на выходе которого образуется суммарное напряжение:
uΣ1(t)=UΣ1·Cos[wпр2t+φк2(t)+φпр2], 0≤t≤T2,
где UΣ1=2Uпр2.
Это напряжение поступает на первый вход перемножителя 49.1, на второй вход которого поступает принимаемый ФМн-сигнал u2(t) с выхода сумматора 45.3. На выходе перемножителя 49.1 образуется гармоническое напряжение
u3(t)=U3·Cos(wг2t+φг2), 0≤t≤Т2,
где  ;
;
K2 - коэффициент передачи перемножителя.
Так как частота настройки wн2 узкополосного фильтра 43.2 выбирается равной частоте wг2 второго гетеродина 35.2
wн2=wг2,
то гармоническое напряжение u3(t) выделяется узкополосным фильтром 43.2, детектируется амплитудным детектором 50 и поступает на управляющий вход ключа 51.1, открывая его. Ключи 51.1 и 51.2 в исходном состоянии всегда закрыты.
Частота настройки wн1 узкополосного фильтра 43.1 выбирается равной второй промежуточной частоте wпр2
wн1=wпр2.
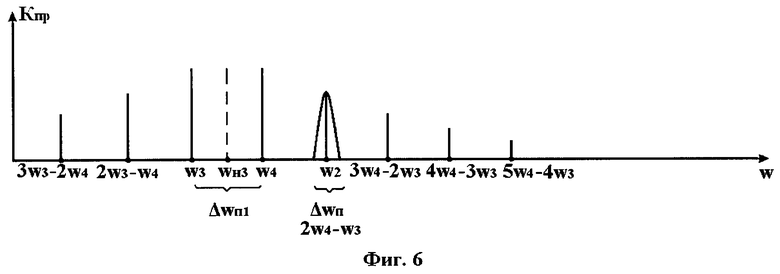
Частота настройки wн3 и полоса пропускания Δwп1 полосового фильтра 46.1 выбираются равными:
 ; Δwп1=w4-w3,
; Δwп1=w4-w3,
где w3, w4 - частоты, определяющие полосу пропускания Δwп1, расположенную «слева» от полосы пропускания Δwп приемника, попадание в которую двух и более сигналов способно сформировать интермодуляционные помехи, попадающие в полосу пропускания Δwп приемника.
Частота настройки wн4 и полоса пропускания Δwп2 полосового фильтра 46.2 выбираются равными:
 ; Δwп2=w6-w5,
; Δwп2=w6-w5,
где w5, w6 - частоты, определяющие полосу пропускания Δwп2, расположенную «справа» от полосы пропускания Δwп приемника, попадание в которую двух и более сигналов способно сформировать интермодуляционные помехи, попадающие в полосу пропускания Δwп приемника.
При этом суммарное напряжение uΣ1(t) с выхода сумматора 45.4 через открытый ключ 51.1 поступает на вход структурного селектора 52, состоящего из удвоителя 53 фазы, измерителей 54.1 и 54.2 ширины спектра, блока 55 сравнения, порогового блока 56 и ключа 51.2. При этом на выходе удвоителя 53 фазы, в качестве которого может быть использован перемножитель, на два входа которого подается одно и то же напряжение uΣ1(t), образуется следующее напряжение
u4(t)=U4·Cos(2wпр2t+2φпр2), 0≤t≤Т2,
где  .
.
Так как 2φк2(t)={0, 2π}, то в указанном напряжении фазовая манипуляция уже отсутствует.
Ширина спектра ФМн-сигнала Δfc определяется длительностью τэ2 элементарных посылок Δfc=1/τэ2. Тогда как ширина спектра его второй гармоники определяется длительностью Т2 сигнала Δf2=1/Т2, т.е. ширина спектра второй гармоники Δf2 в N раз меньше ширины спектра Δfc входного ФМн-сигнала
 ,
,
где N - количество элементарных посылок (для кода Баркера N=7, для m-последовательности N=1023).
Следовательно, при удвоении фазы спектр ФМн-сигнала «сворачивается» в N раз. Это обстоятельство позволяет обнаружить сложный сигнал с фазовой манипуляцией и принять новый вид селекции - структурную селекцию.
Ширина спектра Δfc выходного ФМн-сигнала измеряется с помощью измерителя 54.1, а ширина спектра Δf2 второй его гармоники измеряется с помощью измерителя 54.2. Напряжения U и U2, пропорциональные Δfc и Δf2 соответственно, с выходов измерителей 54.1 и 54.2 ширины спектра поступают на два входа блока 55 сравнения. Так как U>U2, то на выходе блока 55 сравнения образуется положительное постоянное напряжение, амплитуда которого превышает пороговое напряжение Uпор. в пороговом блоке 56. Положительное постоянное напряжение на выходе блока 55 сравнения образуется в том случае, когда напряжения U и U2, поступающие на два входа блока 55 сравнения, значительно отличаются по величине друг от друга. При приблизительном равенстве напряжений (U≈U2), что характерно для простых сигналов и помех, на выходе блока 55 сравнения напряжение отсутствует. Пороговое напряжение Uпор. в пороговом блоке 56 выбирается таким, чтобы его не превышали случайные помехи. При превышении порогового уровня Uпор. в пороговом блоке 56 формируется управляющее напряжение, которое поступает на управляющий вход ключа 51.2 и открывает его. При этом напряжение uΣ1(t) с выхода сумматора 45.4 через открытые ключи 51.1 и 51.2 поступает на первый вход перемножителя 49.2, на второй вход которого подается напряжение uг2(t) второго гетеродина 35.2. На выходе перемножителя 49.2 образуется напряжение
u5(t)=U5·Cos[wг1t-φк2(t)+φг1], 0≤t≤Т2,
где  ;
;
которое представляет собой ФМн-сигнал на частоте первого гетеродина 35.1, стабилизированного эталоном 34 частоты и времени. Это напряжение выделяется полосовым фильтром 46.3 и поступает на информационный вход фазового детектора 57, на опорный вход которого подается напряжение uг1(t) первого гетеродина 35.1.
На выходе фазового детектора 57 образуется низкочастотное напряжение
uн(t)=Uн·Cosφк2(t),
где  ;
;
K3 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду М2(t). Это напряжение поступает на вход цифрового десклемблера 58, принцип работы которого соответствует принципу работы цифрового скремблера 38, но имеет противоположный характер. На выходе десклемблера 58 (выход приемопередатчика) образуется исходная информация источника дискретных сообщений.
Каждый приемопередатчик 7 ближнего радиоканала КП работает следующим образом (фиг.8).
Напряжение высокой частоты
uc(t)=Uc·Cos(wct+φc), 0≤t≤Tc
с выхода опорного генератора 36 поступает одновременно на второй вход фазового манипулятора 39 и на первый вход четвертого смесителя 59, на второй вход которого подается напряжение первого гетеродина 35.1
uг1(t)=Uг1·Cos(wг1t+φг1).
На выходе четвертого смесителя 59 образуются напряжения комбинационных частот. Усилителем 60 выделяется напряжение третьей промежуточной частоты (фиг.5)
uup11(t)=Uпр11·Cos(wup3t+φup11), 0≤t≤Tc,
где 
wup3=wг1-wc - третья промежуточная (разностная) частота;
φup11=φг1-φc.
Это напряжение поступает на второй вход пятого сумматора 61, на первый вход которого подается напряжение первой промежуточной (суммарной) частоты
uup1(t)=Uup1·Cos[wup1t+φк1(t)+φup1] 0≤t≤Tc.
Указанные напряжения через дуплексер 42.3 поступают в приемопередающую антенну, излучаются ею в эфир на частотах w1=wup1 и w7=wup3 (фиг.5) и облучают инкассаторские машины, проходящие мимо данного контрольного пункта.
Каждая инкассаторская машина снабжена радиочастотной меткой 66, представляющей собой пьезокристалл с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем (ВШП) поверхностных акустических волн (ПАВ), состоящим из двух гребенчатых систем электродов 68, соединенных между собой шинами 69 и 70, связанными с микрополосковой приемопередающей антенной 67, и набора отражателей 71.
Центральная частота и полоса пропускания ВШП определяются шагом размещения электродов 68 и их количеством. В данном случае частота настройки wн радиочастотной метки 66 выбирается равной третьей промежуточной частоте wup3 (wн=wup3=w7). Порядок размещения электродов несет индивидуальную информацию об инкассаторской машине, например о ее номерном знаке.
Изготовление ВШП осуществляется стандартными методами фотолитографии и травлением тонкой металлической пленки, осажденной на пьезоэлектрическом кристалле. Возможности современной фотолитографии позволяют создавать ВШП, работающие на частотах до 3 ГГц.
Напряжение uup11(t) улавливается радиочастотной меткой 66 инкассаторской машины, преобразуется в акустическую волну. Работа ВШП основана на том, что переменные в пространстве и времени электрические поля, создаваемые в пьезоэлектрическом кристалле системой электродов, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде ПАВ. Акустическая волна распространяется по поверхности кристалла, достигает отражателей 71, которые отражают волну назад с фазой, определяемой положением отражателей, и амплитудой, пропорциональной коэффициенту отражения. Отраженная акустическая волна модифицируется уникальным, зависящим от топологии ВШП, образом. Затем акустическая волна претерпевает в ВШП обратное преобразование в электромагнитный сигнал с фазовой манипуляцией, который поступает в микрополосковую антенну 67 и излучается ею в эфир.
Сформированный ФМн-сигнал
u7(t)=U7·Cos[w7t+φк3(t)+φ7], 0≤t≤Tc,
где φк3(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М3(t), отражающим номерной знак инкассаторской машины;
улавливается приемопередающей антенной контрольного пункта и через дуплексер 42.3 и второй усилитель 42.2 мощности поступает на вход полосового фильтра 62, с частотой настройки wн=wup3=w7, выделяется им и поступает на первый (информационный) вход второго фазового детектора 63, на второй (опорный) вход которого подается напряжение uup11(t) с выхода усилителя 60 третьей промежуточной частоты. На выходе фазового детектора 63 образуется низкочастотное напряжение
uн3(t)=Uн3·Cosφr3(t), 0≤t≤Tc,
где  ;
;
пропорциональное номерному знаку инкассаторской машины.
Указанное напряжение через линию 64 задержки, время задержки τз которой выбирается равным длительности сигнала Тс (τз=Тс), поступает на первый вход шестого сумматора 65, на второй вход которого подается дискретное сообщение с выхода источника 37 дискретных сообщений. На выходе сумматора формируется модулирующий код М3(t), который через цифровой скремблер 38 поступает на второй вход фазового манипулятора 39. Далее работа приемопередатчика контрольного пункта соответствует работе приемопередатчика инкассаторской машины или центрального диспетчерского пункта, которая описана выше.
При этом если на центральном диспетчерском пункте не выявляется низкочастотное напряжение uн3(t), то это свидетельствует о том, что инкассаторская машина с указанным номерным знаком не проследовала мимо данного контрольного пункта, т.е. нарушила установленный график и маршрут движения. Причиной такой ситуации могут быть и преступные действия самих некоторых сотрудников инкассации. Отсутствие этого низкочастотного напряжения является тревожным сигналом для принятия экстренных мер по розыску инкассаторской машины, нарушившей график и маршрут движения.
Описанная выше работа приемопередатчика соответствует случаю приема полезных ФМн-сигналов по основному каналу на частоте w2.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на частоте wпр2, то он поступает на первый вход сумматора 45.1, выделяется узкополосным фильтром 43.1, инвертируется по фазе на 180° в фазоинвертор 44.1 и поступает на второй вход сумматора 45.1, на выходе которого он компенсируется (фиг.5).
Следовательно, ложный сигнал (помеха), принимаемый по каналу прямого прохождения на частоте wпр2, подавляется.
Если ложные сигналы (помехи) принимаются по интермодуляционному каналу в полосе частот Δwп1 (фиг.6), то они поступают на первый вход сумматора 45.2, выделяются полосовым фильтром 46.1, инвертируются по фазе на 180° в фазоинвертор 44.2 и подаются на второй вход сумматора 45.2, на выходе которого они компенсируются.
Если ложные сигналы (помехи) принимаются по интермодуляционному каналу в полосе частот Δwп2 (фиг.7), то они поступают на первый вход сумматора 45.3, выделяются полосовым фильтром 46.2, инвертируются по фазе на 180° в фазоинвертор 44.3 и подаются на второй вход сумматора 45.3, на выходе которого они компенсируются.
Следовательно, ложные сигналы (помехи), принимаемые по интермодуляционным каналам, подавляются.
Если ложный сигнал (помеха) принимается по зеркальному каналу на частоте w3 (фиг.5)
u3(t)=U3·Cos[w3t+φк(t)+φ3], 0≤t≤Т3,
то усилителями 48.1 и 48.2 второй промежуточной частоты выделяются следующие напряжения:
uпр5(t)=Uпр5·Cos[wпр2t+φк(t)+φпр5],
uпр6(t)=Uпр5·Cos[wпр2t+φк(t)+φпр5-90°],
где  ;
;
wпр2=w3-wг2 - вторая промежуточная частота;
φпр5=φ3-φг2.
Напряжение uпр6(t) с выхода усилителя 48.2 второй промежуточной частоты поступает на вход фазовращателя 47.2 на -90°, на выходе которого образуется напряжение
uпр7(t)=Uпр5·Cos[wпр2t+φк(t)+φпр5-90°+90°]=-Uпр5·Cos[wпр2t+φк(t)+φпр5], 0≤t≤T3.
Напряжения uпр5(t) и uпр7(t), поступающие на два входа сумматора 45.4, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по зеркальному каналу на частоте, подавляется. Для этого используется внешнее «кольцо», включающее смесители 40.2 и 40.3, гетеродин 35.2, фазовращатель 47.1 на +90°, фазовращатель 47.2 на -90°, усилители 48.1 и 48.2 второй промежуточной частоты и сумматор 45.4 и реализующее фазокомпенсационный метод.
По аналогичной причине подавляется и ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте wк2.
Если ложный сигнал (помеха) принимается по первому комбинационному каналу на частоте wк1
uк1(t)=Uк1·Cos[wк1t+φк(t)+φк1], 0≤t≤Тк1,
то усилителями 48.1 и 48.2 второй промежуточной частоты выделяется напряжение:
uпр8(t)=Uпр8·Cos[wпр2t+φк(t)+φпр8],
uпр9(t)=Uпр8·Cos[wпр2t+φк(t)+φпр8+90°], 0≤t≤Tк1,
где  ;
;
wпр2=2wг2-wк1 - вторая промежуточная частота;
φпр8=φг2-φк1.
Напряжение uпр9(t) с выхода усилителя 48.2 второй промежуточной частоты поступает на вход фазовращателя 47.2 на -90°, на выходе которого образуется напряжение
uпр10(t)=Uпр8·Cos[wпр2t+φк(t)+φпр8+90°-90°]=Uпр8·Cos[wпр2t+φк(t)+φпр8], 0≤t≤Tк1.
Напряжения uпр8(t) и uпр10(t) поступают на два входа сумматора 45.4, на выходе которого образуется суммарное напряжение
uΣ2(t)=UΣ2·Cos[wпр2t+φк(t)+φпр8], 0≤t≤Tк,
где UΣ2=2Uпр8.
Это напряжение поступает на первый вход перемножителя 49.1, на второй вход которого подается принимаемый ложный ФМн-сигнал (помеха) uк1(t) с выхода сумматора 45.3. На выходе перемножителя 49.1 образуется гармоническое напряжение
u6(t)=U6·Cos(2wг2t+φг2), 0≤t≤Тк1,
где 
которое не попадает в полосу пропускания узкополосного фильтра 43.2. Ключ 51.1 не открывается и ложный ФМн-сигнал (помеха), принимаемый по первому комбинационному каналу на частоте wк1, подавляется. Для этого используется внутреннее «кольцо», включающее перемножитель 49.1, узкополосный фильтр 43.2, амплитудный детектор 50 и ключ 51.1 и реализующее метод узкополосной фильтрации.
Применение микроконтроллеров в составе бортового оборудования ИМ и аппаратуры КП, файл-сервера с автоматизированными рабочими местами диспетчеров и вспомогательного персонала, объединенных в локальную вычислительную сеть на ЦДП, позволяет организовать одновременную работу нескольких диспетчеров и радиоприемную связь с другими источниками и пользователями информации; автоматизировать процессы обмена информацией между устройствами ИМ, КП и ЦДП, применять безбумажную технологию обработки информации, повысить скорость, качество обработки информации, ее достоверность и качество управления инкассаторскими машинами.
Использование цифрового и аналого-цифрового преобразователей позволяет передавать речь в цифровой форме с временным уплотнением в составе информационных посылок, что позволяет вести переговоры между водителем и диспетчером, не прерывая передачи телеметрической информации, что повышает скорость обмена информацией и исключает ее потери. Кроме того, передача речи в цифровой форме позволяет повысить качество связи: помехозащищенность, кодирование и избыточность дают возможность восстановить частично утерянную в результате помех информацию.
Применение адаптера каналов связи позволяет повысить скорость передачи информации и ее помехозащищенность за счет многократной передачи информационных посылок с последующей их обработкой.
Наличие у водителя пульта управления и индикации позволяет не только получить информацию об отклонении от графика, но и о нахождении в зоне действия контрольного пункта, об успешном обмене информацией с центральным диспетчерским пунктом и о вызове от диспетчера на речевую связь.
При аварии или нападении водитель может подать соответствующий сигнал, даже находясь вне зоны действия какого-либо КП и вне маршрута, за счет кратковременного повышения мощности передатчика, что позволяет устойчиво принимать эти сигналы на ЦДП и сократить время, необходимое для оказания помощи водителю и задержания преступных элементов группой захвата.
Предлагаемая система обеспечивает обмен конфиденциальной дискретной информацией между ЦДП и ИМ и ее защиту от несанкционированного доступа посторонних лиц, в том числе и преступных элементов. При этом защита указанной информации имеет три уровня: энергетический, структурный и криптографический.
Энергетический и структурный уровни обеспечиваются применением сложных сигналов с фазовой манипуляцией, которые обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого используемый сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов.
Структурная скрытность сложного ФМн-сигнала обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложного ФМн-сигнала априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМн-сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять сложные ФМн-сигналы среди других сигналов и помех, действующих в одной и той же полосе частот и в одни и те же промежутки времени. Данная возможность реализуется сверткой спектра сложных ФМн-сигналов.
Криптографический уровень обеспечивается специальными методами шифрования, кодирования и преобразования конфиденциальной дискретной информации, в результате которых ее содержание становится недоступным для посторонних лиц, в том числе и преступных элементов, без предъявления ключа криптограммы и обратного преобразования.
Для точного определения местоположения инкассаторских машин используются навигационные приемники сигналов GPS, микропроцессор и микроЭВМ, устанавливаемые на каждой инкассаторской машине и на центральном диспетчерском пункте. При этом их местоположение отображается на компьютерной карте местности (города), что обеспечивает следующие возможности:
- работу с растровыми (сканированными) картами;
- простую подготовку новых карт при помощи предоставляемой утилиты;
- масштабирование (отображение карты большего/меньшего масштаба при ее наличии);
- центрирование карты на экране относительно заданной точки или инкассаторской машины;
- режимы отображения инкассаторской машины: отображение в реальном времени одной или нескольких (до 35) инкассаторских машин в виде условного знака на карте;
- слежение за выбранными инкассаторскими машинами;
- вывод географических координат курса, скорости инкассаторских машин в текстовом виде;
- направление движения (вектор) инкассаторских машин на карте;
- отображение «следа» (траектории) движения инкассаторских машин на карте.
Кроме того, предлагаемая система обеспечивает повышение помехоустойчивости приемников. Это достигается за счет подавления ложных сигналов (помех), принимаемых по каналу прямого прохождения, зеркальному, комбинационным и интермодуляционным каналам.
Предлагаемая система может быть использована и для диспетчерского контроля и управления любым наземным транспортом.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение надежности защиты инкассаторских машин от преступных элементов.
Это достигается за счет своевременного автоматического обнаружения нарушения установленного графика и маршрута их движения. Причиной этого нарушения могут быть и преступные действия самих некоторых сотрудников инкассации. Для своевременного и автоматического обнаружения нарушения установленного графика и маршрута движения инкассаторских машин используются радиочастотные метки, установленные на них, и сканирующие устройства, размещенные на контрольных пунктах и излучающие гармонические колебания на специальной частоте.
Отличительной особенностью радиочастотных меток являются малые размеры и отсутствие источника электропитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2308059C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2010 |
|
RU2425423C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2010 |
|
RU2452996C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410729C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2019 |
|
RU2722518C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2452985C2 |



Изобретение относится к автоматизированным системам опознавания подвижных транспортных средств, контроля и управления их движением. Центральный диспетчерский пункт (ЦДП) работает в двух режимах - автоматическом и диспетчерского управления. В автоматическом режиме приемопередатчик (10) дальнего канала под управлением адаптера (11) каналов связи непрерывно производит циклический опрос всех контрольных пунктов (КП), прием информации о параметрах движения по маршрутам инкассаторских машин (ИМ) и их техническом состоянии, а включенные в локальную вычислительную сеть файл-сервер (12) и компьютеры автоматизированных рабочих мест диспетчеров (16.1…16.n) - обработку, хранение, отображение полученной информации и корректировку графиков движения на основе анализа статистических данных. С КП осуществляется циклическое сканирование и поочередный опрос ИМ. Каждый КП является активным ретранслятором с накоплением информации. В ЦДП принимается информационная посылка, адаптер (11) каналов связи преобразует ее и передает в файл-сервер (12), который обрабатывает полученную информацию, вычисляет отклонение фактического времени прибытия ИМ на КП от планового. Информация об отклонении от графика вместе с сигналом об успешном обмене информацией (сигнал квитирования) передается передатчиком (10) дальнего радиоканала на ИМ через КП. Изобретение позволяет повысить повышение эффективность защиты ИМ от преступных элементов путем своевременного автоматического обнаружения нарушения установленного графика и маршрута их движения. Используются три уровня защиты информации: энергетический, структурный и криптографический. Первые два уровня обеспечиваются применением сложных сигналов с фазовой манипуляцией, которые обладают высокой энергетической и структурной скрытностью. 9 ил.
Система диспетчерского контроля и управления инкассаторскими машинами, содержащая центральный диспетчерский пункт, в который входят двухканальный приемопередатчик, адаптер каналов связи, соединенный портом ввода-вывода с двухканальным приемопередатчиком, последовательно соединенные цифроаналоговый преобразователь, блок ввода-вывода речи и аналого-цифровой преобразователь, выходы которого подключены к группе входов адаптера каналов связи, первая группа выходов которого соединена с входами цифроаналогового преобразователя, а вторая группа выходов - с управляющими входами блока ввода-вывода речи, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров и вспомогательного персонала, инкассаторские машины, на каждой из которых установлены двухканальный приемопередатчик, соединенный с блоком управления, цифроаналоговый преобразователь, индикатор отклонения от графика, блок ввода-вывода речи, подключенный к группе входов блока управления, аналого-цифровой преобразователь и соединенный с одним из портов ввода-вывода блока управления пульт управления и индикации с индикатором нахождения инкассаторской машины в зоне действия контрольного пункта, индикатором вызова водителя на речевую связь с центральным диспетчерским пунктом, индикатором успешного обмена информацией и органами ввода дискретной информации, к первой группе выходов блока управления подключены входы цифроаналогового преобразователя, выходом соединенного с информационным входом блока ввода-вывода речи, управляющие входы которого подключены ко второй группе выходов блока управления, а выход - к входу аналого-цифрового преобразователя, и контрольные пункты, на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов, соединенные с микроконтроллером, на каждой инкассаторской машине введены последовательно включенные приемник сигналов GPS и микропроцессор, соединенные с блоком управления, при этом вход-выход микропроцессора подключен к приемопередатчику, на центральном диспетчерском пункте введены последовательно включенные приемник сигналов GPS и микроЭВМ, соединенные с адаптером каналов связи, при этом вход-выход микроЭВМ подключен к приемопередатчику дальнего радиоканала, каждый приемопередатчик выполнен в виде источника дискретных сообщений и последовательно включенных цифрового скремблера, фазового манипулятора, второй вход которого соединен с выходом опорного генератора, первого смесителя, второй вход которого через первый гетеродин соединен с первым выходом эталона времени и частоты, усилителя первой промежуточной частоты и первого усилителя мощности, последовательно включенных дуплексера, вход-выход которого соединен с приемопередающей антенной, второго усилителя мощности, первого узкополосного фильтра, первого фазоинвертора, первого сумматора, второй вход которого соединен с выходом второго усилителя мощности, первого полосового фильтра, второго фазоинвертора, второго сумматора, второй вход которого соединен с выходом первого сумматора, второго полосового фильтра, третьего фазоинвертора, третьего сумматора, второй вход которого соединен с выходом второго сумматора, второго смесителя, второй вход которого через второй гетеродин соединен со вторым выходом эталона времени и частоты, первого усилителя второй промежуточной частоты, четвертого сумматора, первого перемножителя, второй вход которого соединен с выходом третьего сумматора, второго узкополосного фильтра, амплитудного детектора, первого ключа, второй вход которого соединен с выходом четвертого сумматора, удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом первого ключа, порогового блока, второго ключа, второй вход которого соединен с выходом первого ключа, второго перемножителя, второй вход которого соединен со вторым выходом второго гетеродина, третьего полосового фильтра, фазового детектора, второй вход которого соединен с выходом первого гетеродина, и цифрового десклемблера, выход которого является выходом приемопередатчика, при этом к второму выходу второго гетеродина последовательно подключены фазовращатель на +90°, третий смеситель, второй вход которого соединен с выходом третьего сумматора, второй усилитель второй промежуточной частоты и фазовращатель на -90°, выход которого соединен со вторым входом четвертого сумматора, в приемопередатчиках инкассаторских машин и центрального диспетчерского пункта источник дискретных сообщений подключен к цифровому скремблеру, первый усилитель мощности подключен к дуплексеру, отличающаяся тем, что приемопередатчики контрольных пунктов снабжены пятым и шестым сумматорами, четвертым смесителем, усилителем третьей промежуточной частоты, четвертым полосовым фильтром, вторым фазовым детектором и линией задержки, причем к выходу опорного генератора последовательно подключены четвертый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель третьей промежуточной частоты и пятый сумматор, второй вход которого соединен с выходом первого усилителя мощности, а выход подключен к дуплексеру, к выходу второго усилителя мощности последовательно подключены четвертый полосовой фильтр, второй фазовый детектор, второй вход которого соединен с выходом усилителя третьей промежуточной частоты, линия задержки и шестой сумматор, второй вход которого соединен с выходом источника дискретных сообщений, а выход подключен к входу цифрового скремблера, инкассаторские машины снабжены радиочастотными метками, представляющими собой пьезокристалл с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн, состоящим из двух гребенчатых систем электродов, соединенных между собой шинами, связанными с микрополосковой приемопередающей антенной, и набора отражателей.
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2003 |
|
RU2256952C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ИНКАССАТОРСКИХ МАШИН | 2002 |
|
RU2222027C1 |

