ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
[0001] Область изобретения относится, в общем, к механическим и электромеханическим устройствам и способам модулирования мощности, и, в частности, к бесступенчатым планетарным устройствам и способам модулирования мощности для модулирования потока мощности в силовой передаче или приводе, таким, как поток мощности от первичного движителя к одному или нескольким навесным или приводимым агрегатам.
Описание известных технических решений
[0002] В некоторых системах несколько устройств приводятся одним источником мощности. Источник мощности обычно имеет узкий диапазон рабочей скорости, в котором эксплуатационные характеристики источника мощности являются оптимальными. Источник мощности предпочтительно эксплуатировать именно в этом оптимизирующем эксплуатационные характеристики диапазоне рабочей скорости. Приводимое устройство обычно также имеет узкий диапазон рабочей скорости, в котором эксплуатационные характеристики приводимого устройства являются оптимальными. И приводимое устройство предпочтительно эксплуатировать именно в этом диапазоне его рабочей скорости, оптимизирующем эксплуатационные характеристики. Для передачи мощности от источника мощности к приводимому устройству обычно используется соединение. Если источник мощности с приводимым устройством соединяет прямое, не модулирующее соединение, приводимое устройство работает со скоростью, пропорциональной скорости источника мощности. Однако часто бывает так, что оптимальная рабочая скорость приводимого устройства не прямо пропорциональна оптимальной рабочей скорости источника мощности. Поэтому предпочтительно ввести в систему соединение, предназначенное для модулирования между скоростью источника мощности и скоростью приводимого устройства.
[0003] Соединения между источником мощности и приводимыми устройствами можно выбирать таким образом, чтобы на выходе данного соединения входная скорость от источника мощности снижалась или повышалась. Однако в часто реализуемых системах типичные известные конструктивные исполнения силовой передачи и/или соединительные устройства обеспечивают в лучшем случае постоянное отношение между входной скоростью от источника мощности и скоростью передачи мощности на приводимое устройство. Одной такой системой является так называемая система привода навесных агрегатов от переднего носка коленчатого вала (front end accessory drive, FEAD), используемая во многих автомобильных применениях. В типичной системе FEAD первичный движитель (обычно двигатель внутреннего сгорания) обеспечивает мощность для привода одного или нескольких вспомогательных агрегатов, таких, как охлаждающий вентилятор, водяной насос, масляный насос, насос гидроусилителя рулевого управления, генератор переменного тока и т.д. При работе автомобиля вспомогательные агрегаты вынуждены работать с частотами вращения, имеющими фиксированное соотношение с частотой вращения первичного движителя. Следовательно, например, если частота вращения двигателя повышается с 800 оборотов в минуту (мин-1) на холостом ходу до 2500 мин-1 при крейсерской скорости, частота вращения каждого вспомогательного агрегата, приводимого двигателем, повышается пропорционально повышению частоты вращения двигателя, и при этом некоторые вспомогательные агрегаты могут работать с варьирующими частотами вращения в пределах между 1600 и 8000 мин-1. Результатом этого конструктивного исполнения системы является то, что часто любой данный вспомогательный агрегат работает не в диапазоне частоты вращения максимальной эффективности. Следовательно, из потерянной мощности при работе и превышения номинальных размеров вспомогательных агрегатов для работы в неоптимальных диапазонах частоты вращения и/или крутящего момента возникают неэффективности.
[0004] Таким образом, по-прежнему существует потребность в устройствах и способах модулирования передачи мощности между первичным движителем и приводимыми устройствами. В некоторых системах было бы предпочтительным регулировать передачу частоты вращения и/или крутящего момента от электрического двигателя и/или двигателя внутреннего сгорания к одному или нескольким приводимым устройствам, работающим при варьирующих, оптимизирующих эффективность частотах вращения. В некоторых нынешних автомобильных применениях есть необходимость в устройстве модулирования мощности для регулирования привода навесных агрегатов от переднего носка коленчатого вала в существующих пределах комплектации. Предлагаемые варианты осуществления устройств модулирования мощности и/или силовых передач, описанные ниже, призваны удовлетворить одну или несколько из этих потребностей.
КРАТКОЕ ОПИСАНИЕ
[0005] Системы и способы, представленные в настоящем описании, имеют несколько отличительных признаков, ни один из которых самостоятельно не обеспечивает его (изобретения) требуемых атрибутов. Без ограничения объема, определенного прилагаемой формулой изобретения, далее вкратце описываются его более примечательные особенности. После знакомства с описанием, особенно, после прочтения раздела, озаглавленного «Подробное описание некоторых вариантов осуществления изобретения», станет понятным, каким образом отличительные признаки системы и способов обеспечивают несколько преимуществ над традиционными системами и способами.
[0006] Один аспект изобретения относится к бесступенчатому приводу навесных агрегатов (БПНА), имеющему навесной агрегат и бесступенчатую коробку передач (БКП), соединенную с навесным агрегатом. Бесступенчатая коробка передач имеет группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления может быть предназначен для вращения вокруг наклоняемой оси. Кроме того, БПНА содержит привод смещения, функционально связанный с БКП. Привод смещения может предназначаться для того, чтобы придавать состояние смещения БКП для наклона сателлитов с передачей мощности за счет сцепления.
[0007] Еще один аспект изобретения относится к бесступенчатому приводу навесных агрегатов (БПНА), имеющему группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг продольной оси БПНА. БПНА может содержать группу осей сателлитов. Каждая ось сателлита функционально соединена с каждым сателлитом с передачей мощности за счет сцепления. Каждая ось сателлита определяет наклоняемую ось вращения для каждого сателлита с передачей мощности за счет сцепления. Каждая ось сателлита может конструктивно исполняться для углового смещения в плоскости, перпендикулярной продольной оси. Каждая ось сателлита может конструктивно исполняться для углового смещения в плоскости, параллельной продольной оси. В одном варианте осуществления БПНА содержит первое водило, которое функционально соединено с первым концом каждой оси сателлита. Первое водило может устанавливаться вокруг продольной оси. БПНА содержит второе водило, которое функционально соединено со вторым концом каждой оси сателлита. Второе водило может устанавливаться вокруг продольной оси. Первое и второе водила конструктивно исполнены так, чтобы вращаться относительно друг друга вокруг продольной оси.
[0008] Еще один аспект изобретения относится к бесступенчатому приводу навесных агрегатов (БПНА), имеющему поворотное входное устройство, соосное с продольной осью БПНА. БПНА имеет вариатор, соосный с продольной осью и соединенный с поворотным входным устройством. Вариатор имеет поворотное выходное устройство. БПНА имеет узел планетарной передачи, соединенный с поворотным выходным устройством. Узел планетарной передачи предназначен для передачи мощности на навесной агрегат. В одном варианте осуществления вариатор содержит группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг главного вала. Вариатор может содержать первое водило, функционально связанное с каждым из сателлитов с передачей мощности за счет сцепления. Кроме того, вариатор может содержать второе водило, функционально связанное с каждым из сателлитов с передачей мощности за счет сцепления. Второе водило может поворачиваться относительно первого водила, чтобы тем самым придавать состояние смещения каждой из осей сателлитов.
[0009] Один аспект изобретения относится к бесступенчатому приводу навесных агрегатов (БПНА), имеющему группу сателлитов с передачей мощности за счет сцепления расположенных на определенном угловом расстоянии между собой вокруг продольной оси БПНА. В одном варианте осуществления БПНА содержит группу осей сателлитов, функционально связанных с каждым сателлитом с передачей мощности за счет сцепления. Каждая ось сателлита определяет наклоняемую ось вращения для каждого сателлита с передачей мощности за счет сцепления. Каждая ось сателлита может конструктивно исполняться для углового смещения в плоскости, перпендикулярной продольной оси. Каждая ось сателлита может конструктивно исполняться для углового смещения в плоскости, параллельной продольной оси. В одном варианте осуществления БПНА содержит первое водило, расположенное соосно продольной оси. Первое водило может быть функционально соединено с каждым сателлитом с передачей мощности за счет сцепления. Первое водило может иметь несколько радиально смещенных пазов, расположенных на определенном угловом расстоянии между собой вокруг центра первого водила. Каждый из радиально смещенных пазов имеет линейное смещение от оси водила. БПНА может содержать второе водило, расположенное соосно продольной оси. Второе водило может иметь несколько радиальных пазов. Радиальные пазы могут располагаться на определенном угловом расстоянии между собой вокруг центра второго водила. Каждый из радиальных пазов радиально совпадает с центром второго водила. Кроме того, БПНА может содержать привод смещения, функционально связанный, по меньшей мере, с одним из первого и второго водил. Привод может служить, чтобы вызывать относительный поворот между первым и вторым водилами.
[0010] Еще один аспект изобретения относится к способу обеспечения регулирования передаточного числа по частоте вращения бесступенчатого привода навесных агрегатов (БПНА). В одном варианте осуществления способ включает стадию, на которой обеспечивают группу сателлитов с передачей мощности за счет сцепления. Способ включает стадию, на которой для каждого из сателлитов с передачей мощности за счет сцепления обеспечивают ось сателлита. Каждый сателлит с передачей мощности за счет сцепления могут конструктивно исполнять с возможностью вращения вокруг соответствующей оси сателлита. Кроме того, способ может включать стадию, на которой предусматривают первое водило, которое конструктивно исполняют так, чтобы взаимодействовать с первым концом каждой из осей сателлитов. Первое водило могут устанавливать вдоль продольной оси БПНА. Способ может включать стадию, на которой предусматривают второе водило, которое конструктивно исполняют так, чтобы взаимодействовать со вторым концом каждой из осей сателлитов. Второе водило могут устанавливать соосно с первым водилом. Кроме того, способ может включать стадию, на которой первое водило располагают относительно второго водила так, что при работе БПНА первое водило можно поворачивать относительно второго водила вокруг продольной оси.
[0011] Еще один аспект изобретения относится к вариатору, имеющему группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг продольной оси. В одном варианте осуществления вариатор имеет первое водило, расположенное соосно продольной оси. Первое водило может быть функционально соединено с каждым сателлитом с передачей мощности за счет сцепления. Первое водило может иметь несколько радиально смещенных пазов, расположенных на определенном угловом расстоянии между собой вокруг центра первого водила. В одном варианте осуществления каждый из радиально смещенных пазов имеет линейное смещение от оси водила. Кроме того, вариатор может иметь второе водило, расположенное соосно продольной оси. Второе водило может иметь несколько радиальных пазов. В одном варианте осуществления радиальные пазы расположены на определенном угловом расстоянии между собой вокруг центра второго водила. Каждый из радиальных пазов радиально совпадает с центром второго водила. Кроме того, вариатор может иметь узел солнца с передачей мощности за счет сцепления радиально вовнутрь от каждого сателлита с передачей мощности за счет сцепления и в контакте с ним. Узел солнца с передачей мощности за счет сцепления может контактировать с первым и вторым водилами. Узел солнца с передачей мощности за счет сцепления практически неподвижен вдоль продольной оси.
[0012] Еще один аспект изобретения относится к способу сборки устройства для модулирования мощности на навесной агрегат. Способ включает стадию, на которой берут бесступенчатую коробку передач (БКП) с группой сателлитов с передачей мощности за счет сцепления на определенном угловом расстоянии между собой вокруг продольной оси. В одном варианте осуществления БКП имеет систему управления на основании смещения, которую используют для придания состояния смещения каждому из сателлитов с передачей мощности за счет сцепления. Кроме того, способ включает стадию, на которой БКП функционально соединяют с навесным агрегатом.
[0013] Еще один аспект изобретения относится к вариатору, имеющему группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг продольной оси. В одном варианте осуществления вариатор имеет первое водило, расположенное соосно продольной оси. Первое водило может быть функционально соединено с каждым сателлитом с передачей мощности за счет сцепления. Первое водило имеет несколько радиально смещенных пазов, расположенных на определенном угловом расстоянии между собой вокруг центра первого водила. Каждый из радиально смещенных пазов имеет линейное смещение от оси водила. Вариатор может содержать второе водило, расположенное соосно продольной оси. В одном варианте осуществления второе водило имеет несколько радиальных пазов. Радиальные пазы могут располагаться на определенном угловом расстоянии между собой вокруг центра второго водила. Каждый из радиальных пазов радиально совпадают с центром второго водила. Кроме того, вариатор может содержать солнце с передачей мощности за счет сцепления, расположенное радиально вовнутрь от каждого сателлита с передачей мощности за счет сцепления и в контакте с ним. Солнце с передачей мощности за счет сцепления имеет наружную периферию, имеющую первую и вторую контактную поверхность. Первая и вторая контактная поверхности могут контактировать с каждым из сателлитов с передачей мощности за счет сцепления.
[0014] В еще одном аспекте изобретение относится к вариатору, имеющему группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг продольной оси. В одном варианте осуществления вариатор имеет ось сателлита, функционально связанную с каждым САтеллитом с передачей мощности за счет сцепления. Ось сателлита может обеспечивать наклоняемую ось вращения для каждого сателлита с передачей мощности за счет сцепления. Вариатор может содержать первое водило, расположенное соосно продольной оси. Первое водило может быть функционально соединено с первым концом оси сателлита. Вариатор может содержать второе водило, расположенное соосно продольной оси. Второе водило может быть функционально соединено со вторым концом оси сателлита. Кроме того, вариатор может содержать удерживающее кольцо водил, соединенное с первым и вторыми водилами. Удерживающее кольцо водил может быть практически неповоротным вокруг продольной оси. Удерживающее кольцо водил может соединять первое и второе водила в осевом направлении. Первое водило может поворачиваться относительно второго водила, чтобы тем самым придавать состояние смещения на каждой из осей сателлитов.
[0015] Один аспект изобретения относится к вариатору, имеющему группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг продольной оси. Вариатор содержит первое водило, соосное продольной оси. В одном варианте осуществления вариатор содержит второе водило, соосное продольной оси. Вариатор может содержать шток смещения, соединенный с первым и вторым водилами. Шток смещения может использоваться для поворота первого водила в первом направлении поворота вокруг продольной оси. Шток смещения может использоваться для поворота второго водила во втором направлении поворота вокруг продольной оси. Первое направление поворота практически противоположно второму направлению поворота.
[0016] Еще один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатого привода навесных агрегатов (БПНА) с группой сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. В одном варианте осуществления БПНА имеет водило, функционально связанное с каждым из сателлитов с передачей мощности за счет сцепления. Способ может включать стадию, на которой определяют уставку для углового смещения водила. Уставку для углового смещения водила основывают, по меньшей мере, частично, на уставке для передаточного числа по частоте вращения. Способ включает стадию, на которой водило поворачивают в положение, соответствующее уставке для углового смещения водила. Поворотом водила вызывают состояние смещения на каждой наклоняемой оси вращения. Водилом регулируют состояние смещения при наклоне каждой из наклоняемых осей вращения. Поворотом водила приводят в действие привод смещения.
[0017] Еще один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатого привода навесных агрегатов (БПНА) с группой сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. БПНА имеет привод смещения, функционально связанный с каждым из сателлитов с передачей мощности за счет сцепления. В одном варианте осуществления способ включает стадию, на которой определяют сигнал команды приводу смещения. Сигнал команды приводу смещения основывают, по меньшей мере, частично, на уставке для угла наклона. Кроме того, способ включает стадию, на которой сигнал команды приводу смещения подают в привод смещения, чтобы тем самым отрегулировать состояние смещения сателлитов с передачей мощности за счет сцепления.
[0018] Один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатого привода навесных агрегатов (БПНА) с группой сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. БПНА имеет привод смещения, функционально связанный с каждым из сателлитов с передачей мощности за счет сцепления. В одном варианте осуществления способ включает стадию, на которой определяют сигнал команды приводу смещения. Сигнал команды приводу смещения основывают, по меньшей мере, частично, на уставке для требуемой частоты вращения. Кроме того, способ включает стадию, на которой сигнал команды приводу смещения подают в привод смещения, чтобы тем самым отрегулировать состояние смещения сателлитов с передачей мощности за счет сцепления.
[0019] Один аспект изобретения относится к узлу сателлита с передачей мощности за счет сцепления, имеющему сателлит с передачей мощности за счет сцепления с центральным отверстием. Узел сателлита с передачей мощности за счет сцепления может иметь ось сателлита, расположенную в центральном отверстии. Ось сателлита имеет первый конец и второй конец. В одном варианте осуществления узел сателлита с передачей мощности за счет сцепления имеет первую опору, соединенную с первым концом оси сателлита. Первая опора может быть практически неповоротной относительно оси сателлита. Узел сателлита с передачей мощности за счет сцепления может иметь вторую опору, соединенную со вторым концом оси сателлита. Вторая опора может быть практически поворотной относительно оси сателлита.
[0020] Еще один аспект изобретения относится к узлу сателлита с передачей мощности за счет сцепления, имеющему сателлит с передачей мощности за счет сцепления с центральным отверстием. В одном варианте осуществления узел сателлита с передачей мощности за счет сцепления имеет ось сателлита, расположенную в центральном отверстии. Ось сателлита может иметь первый конец и второй конец. Первый и второй концы могут иметь внутренние отверстия. Узел сателлита с передачей мощности за счет сцепления может иметь шарик реакции переключения, который входит в каждое из внутренних отверстий. В одном варианте осуществления узел сателлита с передачей мощности за счет сцепления имеет первую опору, которая соединяется с первым концом оси сателлита. Узел сателлита с передачей мощности за счет сцепления может иметь и вторую опору, которая соединяется со вторым концом оси сателлита. Первая и вторая опоры имеют сужающиеся стороны.
[0021] Еще один аспект изобретения относится к узлу солнца с передачей мощности за счет сцепления для бесступенчатой коробки передач (БКП), имеющей группу узлов сателлитов с передачей мощности за счет сцепления. Узел солнца с передачей мощности за счет сцепления содержит солнце с передачей мощности за счет сцепления, соосное продольной оси БКП. Солнце с передачей мощности за счет сцепления может быть радиально внутри каждого из узлов сателлитов с передачей мощности за счет сцепления и в контакте с ним. В одном варианте осуществления узел солнца с передачей мощности за счет сцепления содержит кулачок переключения, функционально связанный с солнцем с передачей мощности за счет сцепления. Узел солнца с передачей мощности за счет сцепления может также содержать группу противоповоротных вставок, прикрепленных к кулачку переключения.
[0022] Один аспект изобретения относится к водилу для бесступенчатой коробки передач (БКП), имеющей группу узлов сателлитов с передачей мощности за счет сцепления. Водило может иметь практически чашеобразное тело с центральным отверстием. В одном варианте осуществления водило может иметь несколько радиально смещенных пазов, расположенных на определенном угловом расстоянии между собой вокруг центрального отверстия. Каждый из радиально смещенных пазов может иметь линейное смещение от оси чашеобразного тела.
[0023] В еще одном аспекте изобретение относится к приводу смещения для бесступенчатой коробки передач (БКП), имеющей систему управления на основании смещения. Привод смещения может иметь гидравлический поршень, соединенный с БКП. В одном варианте осуществления привод смещения имеет гидрораспределитель, сообщающийся по текучей среде с гидравлическим поршнем. Кроме того, привод смещения может иметь привод золотника, соединенный с гидрораспределителем. Привод золотника может использоваться для регулирования гидрораспределителя на основании, по меньшей мере, частично, требуемого состояния смещения БКП.
[0024] Еще один аспект изобретения относится к системе управления на основании смещения для бесступенчатого привода навесных агрегатов (БПНА), имеющей группу сателлитов с передачей мощности за счет сцепления. Система управления на основании смещения содержит датчик, предназначенный для получения данных из БПНА. Система управления на основании смещения может содержать привод смещения, сообщающийся с блоком управления. Кроме того, привод смещения может конструктивно исполняться таким образом, чтобы придавать состояние смещения каждому из сателлитов с передачей мощности за счет сцепления в БПНА. Кроме того, система управления на основании смещения может содержать контроллер смещения в сообщении с блоком управления. Контроллер смещения может использоваться для определения сигнала команды приводу смещения на основании, по меньшей мере, частично, сигнала от датчик. Сигнал команды приводу смещения предназначен для регулирования выходной скорости БПНА.
КРАТКОЕ ОПИСАНИЕ ФИГУР
[0025] Фиг.1 представляет собой вид в перспективном изображении предлагаемого варианта осуществления бесступенчатого привода навесных агрегатов (БПНА), имеющего систему управления на основании смещения.
[0026] Фиг.2 представляет собой вид в перспективном изображении с разрезом бесступенчатой коробки передач (БКП), которая может использоваться с БПНА, показанным на фиг.1.
[0027] Фиг.3 представляет собой покомпонентный вид в перспективном изображении БКП, показанной на фиг.2.
[0028] Фиг.4 представляет собой разрез БКП, показанной на фиг.2.
[0029] Фиг.5 представляет собой вид в перспективном изображении с частичным разрезом узла вариатора, который может использоваться в БКП, показанной на фиг.2.
[0030] Фиг.6 представляет собой разрез некоторых компонентов БКП, показанной на фиг.2.
[0031] Фиг.7 представляет собой подробный разрез А некоторых компонентов узла вариатора, показанного на фиг.5.
[0032] Фиг.8 представляет собой вид в перспективном изображении удерживающего кольца водила, которое может использовать с узлом вариатора, показанным на фиг.5.
[0033] Фиг.9 представляет собой вид в перспективном изображении предлагаемого варианта осуществления вилочного элемента, который может использоваться с БКП, показанной на фиг.2.
[0034] Фиг.10 представляет собой вид в перспективном изображении предлагаемого варианта осуществления водила, которое может использоваться с узлом вариатора, показанным на фиг.5.
[0035] Фиг.11 представляет собой разрез узла сателлита с передачей мощности за счет сцепления, который может использоваться с узлом вариатора, показанным на фиг.5.
[0036] Фиг.12А представляет собой вид в перспективном изображении предлагаемого варианта осуществления опоры, которая может использоваться в узле сателлита с передачей мощности за счет сцепления, показанном на фиг.11.
[0037] Фиг.12 В представляет собой разрез опоры, показанной на фиг.12А, по линии А-А.
[0038] Фиг.13 представляет собой вид в перспективном изображении с разрезом узла солнца с передачей мощности за счет сцепления, который может использоваться с узлом вариатора, показанным на фиг.5.
[0039] Фиг.14 представляет собой покомпонентный вид в перспективном изображении с разрезом узла солнца с передачей мощности за счет сцепления, показанного на фиг.13.
[0040] Фиг.15 представляет собой разрез предлагаемого варианта осуществления бесступенчатой коробки передач (БКП), имеющей систему управления на основании смещения.
[0041] Фиг.16 представляет собой вид в перспективном изображении узла вариатора БКП, показанного на фиг.15.
[0042] Фиг.17 представляет собой разрез узла вариатора, показанного на фиг.16.
[0043] Фиг.18 представляет собой покомпонентный вид в перспективном изображении узла вариатора, показанного на фиг.16.
[0044] Фиг.19 представляет собой вид в плане узла вариатора, показанного на фиг.16.
[0045] Фиг.20А представляет собой вид в плане предлагаемого варианта осуществления водила, которое может использоваться с узлом вариатора, показанным на фиг.16.
[0046] Фиг.20В представляет собой разрез водила, показанного на фиг.20А.
[0047] Фиг.20С представляет собой вид в перспективном изображении водила, показанного на фиг.20А.
[0048] Фиг.21А представляет собой подробный вид в плане радиально смещенного паза водила, показанного на фиг.20А.
[0049] Фиг.21В представляет собой схематическую иллюстрацию радиально смещенного паза, показанного на фиг.21А.
[0050] Фиг.21С представляет собой еще одну схематическую иллюстрацию радиально смещенного паза, показанного на фиг.21А.
[0051] Фиг.21D представляет собой еще одну схематическую иллюстрацию радиально смещенного паза, показанного на фиг.21А.
[0052] Фиг.21Е представляет собой вид в плане еще одного варианта осуществления радиально смещенного паза водила, показанного на фиг.20А.
[0053] Фиг.21F представляет собой схематическую иллюстрацию радиально смещенного паза, показанного на фиг.21Е.
[0054] Фиг.21G представляет собой еще одну схематическую иллюстрацию радиально смещенного паза, показанного на фиг.21Е.
[0055] Фиг.21Н представляет собой еще одну схематическую иллюстрацию радиально смещенного паза, показанного на фиг.21Е.
[0056] Фиг.22 представляет собой разрез варианта осуществления узла сателлита с передачей мощности за счет сцепления, который может использоваться с узлом вариатора, показанным на фиг.16.
[0057] Фиг.23 представляет собой вид в перспективном изображении варианта осуществления корпусного элемента, который может использоваться с БКП, показанной на фиг.2 или фиг.15.
[0058] Фиг.24 представляет собой еще один вид в перспективном изображении корпусного элемента, показанного на фиг.23.
[0059] Фиг.25 представляет собой блок-схему процесса управления на основании смещения, который может использоваться с БКП, показанной на фиг.2 или фиг.15.
[0060] Фиг.26 представляет собой график, который представляет справочную таблицу, которую можно использовать в подпроцессе процесса управления на основании смещения, показанного на фиг.25.
[0061] Фиг.27 представляет собой блок-схему подпроцесса привода, который может использоваться с процессом управления на основании смещения, показанным на фиг.25.
[0062] Фиг.28А представляет собой схематическую иллюстрацию предлагаемого варианта осуществления системы управления на основании смещения.
[0063] Фиг.28В представляет собой схематическую иллюстрацию предлагаемого варианта осуществления привода смещения, который может использоваться с системой управления на основании смещения, показанной на фиг.28А.
[0064] Фиг.29А представляет собой схематическую иллюстрацию некоторых электронных аппаратных средств, которые могут использоваться с системой управления на основании смещения, показанной на фиг.28.
[0065] Фиг.29В представляет собой блок-схему процесса управления на основании смещения, который может использоваться с БКП, показанной на фиг.2 или фиг.15.
[0066] Фиг.29С представляет собой еще одну блок-схему процесса управления на основании смещения, который может использоваться с БКП, показанной на фиг.2 или фиг.15.
[0067] Фиг.29D представляет собой еще одну дополнительую блок-схему процесса управления на основании смещения, который может использоваться с БКП, показанной на фиг.2 или фиг.15.
[0068] Фиг.30 представляет собой вид в перспективном изображении предлагаемого варианта осуществления бесступенчатой коробки передач (БКП), имеющей систему управления на основании смещения.
[0069] Фиг.31 представляет собой вид в перспективном изображении с разрезом БКП, показанной на фиг.30.
[0070] Фиг.32 представляет собой разрез БКП, показанной на фиг.30.
[0071] Фиг.33 представляет собой покомпонентный вид в перспективном изображении с разрезом БКП, показанной на фиг.30.
[0072] Фиг.34 представляет собой разрез узла вариатора, который может использоваться с БКП, показанной на фиг.30.
[0073] Фиг.35 представляет собой покомпонентный вид в перспективном изображении с разрезом узла вариатора, показанного на фиг.34.
[0074] Фиг.36 представляет собой покомпонентный вид в перспективном изображении варианта осуществления узла сателлит с передачей мощности за счет сцепления, который может использоваться с узлом вариатора, показанного на фиг.34.
[0075] Фиг.37 представляет собой разрез узла сателлита с передачей мощности за счет сцепления, показанного на фиг.36.
[0076] Фиг.38 представляет собой вид в перспективном изображении предлагаемого варианта осуществления вставки водила, которая может использоваться с узлом вариатора, показанным на фиг.34.
[0077] Фиг.39 представляет собой вид в перспективном изображении водила, которое может использоваться с узлом вариатора, показанным на фиг.34.
[0078] Фиг.40 представляет собой вид в перспективном изображении с разрезом водила, показанного на фиг.39.
[0079] Фиг.41 представляет собой вид в перспективном изображении варианта осуществления штока смещения, который может использоваться с БКП, показанной на фиг.30.
[0080] Фиг.42 представляет собой разрез штока смещения, показанного на фиг.41, по линии В-В.
[0081] Фиг.43 представляет собой схематическую иллюстрацию предлагаемого варианта осуществления бесступенчатой коробки передач (БКП), имеющей систему управления на основании смещения.
[0082] Фиг.44 представляет собой схематическую иллюстрацию еще одного предлагаемого варианта осуществления бесступенчатой коробки передач (БКП), имеющей систему управления на основании смещения.
[0083] Фиг.45 представляет собой разрез варианта осуществления вариатора.
[0084] Фиг.46 представляет собой вид в перспективном изображении с частичным разрезом узла солнца с передачей мощности за счет сцепления, который может использоваться в вариаторе, показанном на фиг.45.
[0085] Фиг.47 представляет собой разрез узла солнца с передачей мощности за счет сцепления, показанного на фиг.46.
[0086] Фиг.48 представляет собой подробный разрез С узла солнца с передачей мощности за счет сцепления, показанного на фиг.46.
[0087] Фиг.49 представляет собой разрез некоторых компонентов вариатора, которые могут использоваться с БКП, показанной на фиг.2, фиг.15 и/или фиг.30.
[0088] Фиг.50 представляет собой разрез еще одного варианта осуществления водил, которые могут использоваться с БКП, показанной на фиг.2, фиг.15 и/или фиг.30.
[0089] Фиг.51 представляет собой разрез водил, показанных на фиг.50, по линии С-С.
[0090] Фиг.52 представляет собой разрез еще одного варианта осуществления водил, которые могут использоваться с БКП, показанной на фиг.2, фиг.15 и/или фиг.30.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ПРЕДЛАГАЕМЫХ ВАРИАНТОВ
ОСУЩЕСТВЛЕНИЯ
[0091] Предпочтительные варианты осуществления будут теперь описаны со ссылками на прилагаемые фигуры, на которых подобные элементы обозначены подобными позициями. Терминология, используемая в последующем описании, не должна интерпретироваться каким-либо ограниченным или рестриктивным образом лишь по той причине, что она используется в связи с подробным описанием некоторых конкретных вариантов осуществления изобретения. Кроме того, варианты осуществления изобретения могут включать несколько признаков изобретения, ни один из которых самостоятельно не обеспечивает его требуемых атрибутов и самостоятельно не является существенным для практического осуществления описанных изобретений. Некоторые варианты осуществления БКП, раскрытые в настоящем описании, в целом относятся к типу, описанному в патентах США №№6241636, 6419608, 6689012, 7011600, 7166052, заявках на патент США №№11/243 484, 11/543 311 и 12/198 402 и заявках на патент согласно Договору о патентной кооперации PCT/US 2007/023315, PCT/IB 2006/054911, PCT/US 2008/068929 и PCT/US 2007/023315, PCT/US 2008/074496. Полное описание каждого из этих патентов и заявок на патент данной ссылкой включается в настоящее описание.
[0092] Используемые в настоящем описание термины «функционально соединенный», «функционально связанный», «функционально сочлененный», «операционно соединенный», «операционно связанный», «операционно сочлененный» и подобные термины относятся к взаимосвязи (механической, соединению, сочленению и иной) между элементами, посредством которой действие одного элемента приводит к соответствующему, последующему или одновременному действию или срабатыванию второго элемента. Следует отметить, что при использовании указанных терминов для описания вариантов осуществления изобретения обычно описываются конкретные конструкции или механизмы, которые соединяют или связывают элементы. Однако, если конкретно не указано иное, когда используется один из указанных терминов, этот термин указывает на то, что фактическое соединение или связь может принимать самые разнообразные формы, которые в определенных случаях будут очевидными специалисту в соответствующей области техники.
[0093] В целях описания термин «аксиальный», используемый в настоящем описании, означает направление или положение вдоль оси, которая параллельна главной или продольной оси коробки передач или вариатора. Термин «радиальный» используется в настоящем описании для указания направления или положения, перпендикулярного относительно продольной оси коробки передач или вариатора. Для ясности и краткости иногда подобные компоненты, обозначенные подобными позициями (например, подшипник 152А и подшипник 152В) будут упоминаться совместно как обозначенные одной позицией (например, подшипник 152).
[0094] Следует отметить, что упоминание в настоящем описании «сцепления» не исключает случаев применения, в которых преобладающий или исключительный режим передачи мощности происходит путем «трения». Не пытаясь установить в данном случае категоричное различие между передачей за счет сцепления и фрикционной передачей, их обычно можно понимать как разные режимы передачи мощности. Передачи за счет сцепления обычно включают передачу мощности между двумя элементами поперечными (сдвигающими) силами в тонком слое текучей среды, захваченной между этими элементами. Текучие среды, используемые в этих случаях применения, обычно имеют коэффициенты сцепления выше, чем у обычных минеральных масел. Коэффициент сцепления (µ) представляет максимальные имеющиеся тяговые усилия, которые должны присутствовать на поверхностях сопряжения контактирующих компонентов, и является показателем максимального имеющегося приводного крутящего момента. Фрикционные передачи обычно включают передачу мощности между двумя элементами за счет сил трения между этими элементами. В целях настоящего описания следует понимать, что описываемые в нем БКП могут работать в обоих режимах передачи мощности - за счет сцепления и фрикционной. Например, в варианте осуществления в котором БКП используется для применения в велосипеде, БКП может иногда работать как фрикционная передача, а иногда как передача за счет сцепления в зависимости от условий крутящего момента и скорости во время работы.
[0095] Варианты осуществления изобретения, раскрытые в настоящем описании, относятся к управлению вариатором и/или БКП с использованием практически сферических сателлитов, каждый из которых имеет наклоняемую ось вращения, которая может регулироваться для достижения при работе требуемого отношения входной частоты вращения и выходной частоты вращения. В некоторых вариантах осуществления регулировка указанной оси вращения включает угловое отклонение оси сателлита в одной плоскости, чтобы добиться угловой регулировки оси вращения сателлита во второй плоскости, причем вторая плоскость практически перпендикулярна первой плоскости. Угловое отклонение в первой плоскости именуется в настоящем описании «смещением», «углом смещения» и/или "состоянием смещения". В целях обсуждения первая плоскость практически параллельна продольной оси вариатора и/или БКП. Вторая плоскость может быть практически перпендикулярной продольной оси. В одном варианте осуществления система управления координирует использование угла смещения для создания сил между определенными контактирующими компонентами в вариаторе, которые наклоняют ось вращения сателлита практически во второй плоскости. Наклоном оси вращения сателлита регулируется передаточное число вариатора. Вышеупомянутый угол смещения, или состояние смещения, можно применять в плоскости, практически перпендикулярной плоскости страницы фиг.4, например. Далее будут обсуждены варианты осуществления, использующие некоторые предлагаемые системы управления на основании смещения для достижения нужного передаточного числа вариатора по частоте вращения.
[0096] Один аспект устройств регулирования крутящего момента / частоты вращения, раскрытых в настоящем описании, относится к приводным системам, в которых первичный движитель приводит различные приводимые устройства. Первичным движителем может быть, например, электрический двигатель и/или двигатель внутреннего сгорания. Для целей настоящего описания навесной агрегат представляет собой любую машину или устройство, которая или которое может приводиться первичным движителем. Для иллюстрации, а не для ограничения объема настоящего изобретения, указанными машиной или устройством может быть устройство отбора мощности, насос, компрессор, генератор, вспомогательный электрический двигатель и т.д. Навесные агрегаты, предназначенные для привода первичным движителем, могут также включать генераторы переменного тока, водяные насосы, насосы гидроусилителей рулевого управления, топливные насосы, масляные насосы, компрессоры системы кондиционирования воздуха, охлаждающие вентиляторы, нагнетатели, турбонагнетатели и любое иное устройство, которое обычно приводится автомобильным двигателем. Как уже отмечалось, при изменении требуемой скорости или мощности частота вращения первинного движителя обычно изменяется; однако во многих случаях навесные агрегаты оптимально работают при определенной, практически постоянной частоте вращения. Варианты осуществления устройств регулирования крутящего момента / частоты вращения, раскрытые в настоящем описании, могут использоваться для управления мощностью, подаваемой на навесные агрегаты, приводимые первичным движителем.
[0097] Например, в некоторых вариантах осуществления регуляторы частоты вращения, раскрытые в настоящем описании, могут использоваться для регулирования частоты вращения навесных агрегатов автомобиля, приводимых шкивом, прикрепленным к коленчатому валу двигателя автомобиля. Обычно навесные агрегаты должны Работать соответствующим образом при работе двигателя как на холостом ходу при малой частоте вращения, так и при высокой частоте вращения. Часто при одной частоте вращения навесные агрегаты работают в оптимальном режиме, а при других частотах вращения испытывают снижение эффективности. Кроме того, конструкция навесных агрегатов страдает от необходимости работать в большом диапазоне частоты вращения вместо работы в оптимизированном узком диапазоне частоты вращения. Во многих случаях, когда двигатель работает при частоте вращения, иной, нежели низкая частота вращения, навесные агрегаты потребляют излишнюю мощность и тем самым снижают экономию топлива двигателя. Кроме того, потребление мощности навесными агрегатами снижает способность двигателя служить приводом транспортному средству, что в некоторых случаях обуславливает необходимость в большем двигателе.
[0098] В других случаях предлагаемые варианты осуществления устройств регулирования крутящего момента / частоты вращения, раскрытые в настоящем описании, могут использоваться для уменьшения или увеличения частоты вращения и/или крутящего момента, подаваемых на навесные агрегаты, для достижения оптимальных эксплуатационных характеристик системы. В некоторых случаях предлагаемые варианты осуществления устройств регулирования крутящего момента / частоты вращения, раскрытые в настоящем описании, могут использоваться для увеличения частоты вращения, передаваемой на навесные агрегаты, когда первичный движитель работает на малых оборотах, и уменьшения частоты вращения, передаваемой на навесные агрегаты, когда первичный движитель работает на больших оборотах. Таким образом, конструкцию и работу навесных агрегатов можно оптимизировать, если обеспечить то, что навесные агрегаты будут работать при одной практически благоприятной частоте вращения, и навесные агрегаты не нужно будет изготавливать большими, чем необходимо для обеспечения достаточных эксплуатационных характеристик при низких частотах вращения. Кроме того, навесные агрегаты можно изготавливать меньшими, поскольку устройства регулирования крутящего момента / частоты вращения могут уменьшать частоту вращения, подаваемую на навесные агрегаты, когда первичный движитель работает на больших оборотах, тем самым снижая напряжение, которое навесные агрегаты должны выдерживать при больших оборотах. При этом, поскольку навесные агрегаты не функционируют с высокой частотой вращения, их предполагаемый срок службы может существенно повыситься. В некоторых случаях обеспечивается более плавная работа транспортного средства, поскольку навесным агрегатам не приходится работать при низкой или высокой частоте вращения. Кроме того, при высокой частоте вращения транспортное средство может работать тише, поскольку навесные агрегаты Работают при более низкой частоте вращения.
[0099] Регуляторы частоты вращения / крутящего момента, раскрытые в настоящем описании, могут обеспечить снижение размера и массы навесных агрегатов, а также первичного движителя, тем самым снизив массу транспортного средства и, таким образом, повысив экономию топлива. Кроме того, в некоторых случаях вариант использования меньших навесных агрегатов и меньшего первичного движителя снижает стоимость этих компонентов и транспортного средства в целом. Также меньшие навесные агрегаты и меньший первичный движитель могут обеспечить гибкость компоновки и позволяют уменьшить размеры системы. Кроме того, варианты осуществления регуляторов крутящего момента / частоты вращения, представленные в настоящем описании, могут повысить экономию топлива, обеспечивая работу навесных агрегатов при наиболее эффективной частоте вращения в рабочем диапазоне первичного движителя. Наконец, регуляторы крутящего момента / частоты вращения повышают экономию топлива за счет предотвращения потребления навесными агрегатами избыточной мощности при любой частоте вращения, иной, нежели низкая.
[0100] Обратимся теперь к фиг.1 и 2, в одном варианте осуществления беступенчатый привод навесных агрегатов (БПНА) 10 может содержать бесступенчатую коробку передач (БКП) 12, соединенную с генератором переменного тока 14. В одном варианте осуществления генератором переменного тока 14 может быть, как иллюстративный пример, генератор переменного тока С.Е.Niehoff 1224-3. В одном варианте осуществления БКП 12 может оснащаться приводом смещения 16 и набором датчиков частоты вращения 18, предназначенных для сообщения с системой управления на основании смещения (например, фиг.25-29). БКП 12 может иметь смазочный коллектор 20 и масляный поддон 22, которые могут подключаться к системе смазки и охлаждения (не показана). В одном варианте осуществления между БКП 12 и генератором переменного тока 14 может располагаться крышка 23 шкива. Крышка 23 шкива может в дополнение к иным функциям обеспечивать конструктивное крепление БКП 12 к генератору переменного тока 14. Крышка 23 шкива радиально окружает приводной шкив 24. Приводной шкив 24 принимает подводимую мощность, например, с ремня (не показан). В некоторых вариантах осуществления крышка 23 шкива предназначена для обеспечения доступа к шкиву для ремня.
[0101] Обратимся теперь к фиг.3-4, в одном варианте осуществления БКП 12 содержит корпус 26, который крепится к крышке 28 корпуса. Корпус 26 и крышка 28 корпуса конструктивно исполнены таким образом, чтобы функционально соединяться с узлом вариатора 30 и заключать его в себе. Узел вариатора 30 соединен с первым кольцом 32, действующим за счет сцепления, и вторым кольцом 34, действующим за счет сцепления. Первое кольцо 32, действующее за счет сцепления, соединено с первым узлом нагрузочных кулачковых роликов 36. Второе кольцо 34, действующее за счет сцепления, может соединяться со вторым узлом нагрузочных кулачковых роликов 38. В одном варианте осуществления первый узел нагрузочных кулачковых роликов 36 соединен с входной ведущей деталью 40 кулачков. Второй узел нагрузочных кулачковых роликов 38 может соединяться с выходной ведущей деталью 42. В одном варианте осуществления входная ведущая деталь 40 кулачков соединена с приводным шкивом 24. Каждый из узлов нагрузочных кулачковых роликов 36 и 38 может иметь зубчатую и/или с надрезами наружную периферию, которая может располагаться вблизи каждого из датчиков частоты вращения 18. Узел вариатора 30 может быть функционально соединен с приводом смещения 16 посредством серьги 43.
[0102] В одном варианте осуществления БКП 12 может содержать главный вал 44, практически совпадающий с продольной осью БКП 12. Главный вал 44 может иметь отверстие со шпоночными пазами 45, предназначенное для приема, например, вала генератора переменного тока 14. Приводной шкив 24 может радиально опираться на одном конце главного вала 44 на первый подшипник 46 и второй подшипник 48. В некоторых вариантах осуществления между подшипниками 46, 48 может размещаться прокладка 50. В одном варианте осуществления БКП 12 оснащена упорным подшипником 52, соединенным с главным валом 44. Упорный подшипник 52 может соединяться со шкивом 24. Упорный подшипник 52 может предназначаться для обеспечения аксиальной опоры для некоторых компонентов БКП 12 и реакции на аксиальные силы от них. Первый и второй подшипники 46, 48 и прокладка 50 могут конструктивно исполняться так, чтобы взять на себя часть аксиальных нагрузок, воздействующих на упорный подшипник 52. Среди прочего, распределение аксиальных нагрузок может продлить срок службы упорного подшипника 52 и предотвратить перегрузку упорного подшипника 52.
[0103] В одном варианте осуществления компоновочный узел вариатора 30 содержит несколько узлов сателлитов с передачей мощности за счет сцепления 54, расположенных на определенном угловом расстоянии между собой вокруг главного вала 44. Компоновочный узел вариатора 30 может иметь узел солнца с передачей мощности за счет сцепления 56, расположенный соосно главному валу 44. Узел солнца с передачей мощности за счет сцепления 56 может конструктивно исполняться таким образом, чтобы функционально соединяться с каждым из узлов сателлитов с передачей мощности за счет сцепления 54. Узел солнца с передачей мощности за счет сцепления 56 может располагаться радиально внутри каждого из узлов сателлитов с передачей мощности за счет сцепления 54. В некоторых вариантах осуществления узел солнца с передачей мощности за счет сцепления 56 может перемещаться в аксиальном направлении вдоль главного вала 44. В одном варианте осуществления компоновочный узел вариатора 30 может содержать первое водило 58, функционально связанное со вторым водилом 60. Первое и второе водила 58, 60 служат опорой каждому из узлов сателлитов с передачей мощности за счет сцепления 54. В одном варианте осуществления первое водило 58 может соединяться с крышкой 62 первого водила. Второе водило 60 может соединяться с крышкой 64 второго водила. Крышки 62 и 64 водил могут конструктивно исполняться таким образом, чтобы функционально соединяться с узлами сателлитов с передачей мощности за счет сцепления 54. Крышки 62, 64 водил могут конструктивно исполняться таким образом, чтобы реагировать на силы, создаваемые при переключении БКП 12.
[0104] В некоторых вариантах осуществления крышки 62, 64 водил выполнены как одно целое с водилами 58, 60 соответственно. В других вариантах осуществления крышки 62, 64 водил жестко и постоянно прикреплены к водилам 58, 60. В одном варианте осуществления крышки 62, 64 водил представляют собой отдельные компоненты от водил 58, 60, чтобы позволить использовать для этих компонентов разные материалы. Например, водило 58 может изготавливаться из алюминия, а крышка 62 водила может изготавливаться из стали. Как отдельный компонент, крышка 62 водила может также облегчить сборку узлов сателлитов с передачей мощности за счет сцепления 54 с водилом 58. В некоторых вариантах осуществления конструктивное исполнение крышек 62 водила как отдельных компонентов может упростить изготовление первого и второго водил 58, 60.
[0105] Обратимся к фиг.5, в одном варианте осуществления компоновочный узел вариатора 30 содержит удерживающее кольцо 66 водил, предназначенное для соединения первого и второго водил 58, 60. Удерживающее кольцо 66 водил может соединяться с корпус 26 и конструктивно исполняться таким образом, чтобы быть неповоротным относительно продольной оси БКП 12. В одном варианте осуществления каждый из узлов сателлитов с передачей мощности за счет сцепления 54 содержит, по меньшей мере, одну опору 68, которая функционально соединена с осью 70 сателлита. Каждая из опор 68 выполнена таким образом, чтобы функционально соединяться с узлом солнца с передачей мощности за счет сцепления 56. В одном варианте осуществления узел солнца с передачей мощности за счет сцепления 56 содержит несколько противоповоротных вставок 72. Противоповоротные вставки 72 могут конструктивно исполняться таким образом, чтобы примыкать сбоку к каждой из опор 68. Противоповоротные вставки 72 могут соединяться с первым кулачком переключения 74. В некоторых вариантах осуществления противоповоротные вставки 72 могут соединяться со вторым кулачком переключения 76. В еще одних вариантах осуществления противоповоротные вставки 72 могут соединяться с обоими - первым и вторым - кулачками переключения 74 и 76. Противоповоротные вставки 72 могут практически предотвращать вращение кулачков переключения 74 и 76 при работе БКП 12.
[0106] При работе БКП 12 подводимая мощность может подаваться на приводной шкив 24, например, ремнем или цепью (не показаны). Приводной шкив 24 передает подводимую мощность на входную ведущую деталь 40 кулачков, которая в свою очередь через первый узел нагрузочных кулачковых роликов 36 передает мощность на первое кольцо 32, действующее за счет сцепления. Первое кольцо 32, действующее за счет сцепления, передает мощность на каждый из узлов сателлитов с передачей мощности за счет сцепления 54. Каждый из узлов сателлитов с передачей мощности за счет сцепления 54 доставляет мощность на второе кольцо 34, действующее за счет сцепления, которое в свою очередь передает мощность на выходную ведущую деталь 42 кулачков через второй узел нагрузочных кулачковых роликов 38. В одном варианте осуществления выходная ведущая деталь 42 передает мощность на главный вал 44. Главный вал 44 может соединяться, например, с генератором переменного тока 14 посредством отверстия со шпоночными пазами 45. Переключение передаточного числа частоты вращения на входном валу к частоте вращения на выходном валу и, следовательно, переключение передаточного числа крутящего момента на входном валу к крутящему моменту на выходном валу, сопровождается наклоном оси вращения узлов сателлитов с передачей мощности за счет сцепления 54 до угла наклона, иногда именуемого в настоящем описании как гамма (γ). Наклон оси вращения узлов сателлитов с передачей мощности за счет сцепления 54 происходит практически в плоскости страницы фиг.4, например. Наклон оси вращения узлов сателлитов с передачей мощности за счет сцепления 54 может осуществляться за счет поворота второго водила 60 относительно первого водила 58 вокруг продольной оси. Это относительное угловое вращательное смещение иногда именуется в настоящем описании как β. Поворот второго водила 60 относительно первого водила 58 создает угол смещения, состояние, иногда именуемое в настоящем описании как "состояние смещения", на каждом из узлов САтеллитов с передачей мощности за счет сцепления 54. Угол смещения может придаваться в плоскости, практически параллельной продольной оси БКП 12 (например, плоскость, перпендикулярная плоскости страницы фиг.4). В одном варианте осуществления угол смещения может быть в пределах 0-15 градусов. Обычно, угол смещения находится в пределах 0-8 градусов.
[0107] Обратимся теперь к фиг.6, в одном варианте осуществления входная ведущая деталь 40 кулачков соединена с приводным шкивом 24. Входная ведущая деталь 40 кулачков может содержать несколько поверхностей реакции 78 на ролики, которые могут предназначаться для того, чтобы функционально соединяться с первым узлом нагрузочных кулачковых роликов 36. Главный вал 44 может иметь центральный канал смазки 80, питающий несколько распределительных каналов смазки 82А, 82В, 82С. Распределительные каналы смазки 82А, 82В, 82С пересекают центральный канал смазки 80 и проходят радиально наружу от оси главного вала 44. В одном варианте осуществления главный вал 44 может иметь шлицевую часть 84, предназначенную для соединения с выходной ведущей деталью 42 кулачков. На одном конце шлицевой части 84 главный вал 44 может иметь заплечик 86. На противоположном конце шлицевой части 84 главный вал 44 может иметь канавку 88. В некоторых вариантах осуществления главный вал имеет на одном конце резьбовое отверстие 90. При сборке БКП 12 компоновочный узел вариатора 30 располагается соосно главному валу 44. Сборочный инструмент (не показан) соединяется с резьбовым отверстием 90. Сборочный инструмент вкручивается в отверстие 90 и прикладывает силу на выходное кольцо 42, чтобы обеспечить зажим выходного кольца 42 и входного кольца 40 до заданной осевой силы. Для того чтобы сохранить настройку осевого предварительного натяга после извлечения сборочного инструмента, в канавку 88 можно поместить, по меньшей мере, один зажим 92 (фиг.3 и 4). В некоторых вариантах осуществления чтобы сохранить настройку осевого предварительного натяга, в канавку 88 с зажимом 92 можно поместить прокладки (не показаны).
[0108] Перейдем теперь к фиг.7, в одном варианте осуществления первое водило 58 предназначено для соединения со вторым водилом 60 посредством болта с заплечиком 94. Болт с заплечиком 94 может конструктивно исполняться таким образом, чтобы соединяться с удерживающим кольцом 66 водила. В одном варианте осуществления под головку болта с заплечиком 94 может помещаться прокладка 96. Толщина прокладки 96 может выбираться так, чтобы регулировать осевую силу и/или осевой зазор между первым водилом 58 и вторым водилом 60 при затягивании болта с заплечиком 94. В одном варианте осуществления необходимо иметь минимальную осевую силу между первым водилом 58 и вторым водилом 60, чтобы второе водило 60 могло поворачиваться относительно первого водила 58 вокруг продольной оси, имея при этом минимальное осевое смещение или зазор между первым водилом 58 и вторым водилом 60. В некоторых вариантах осуществления удерживающее кольцо водила 66 соединено с корпусом 26 и практически неподвижно вокруг продольной оси. В других вариантах осуществления между первым водилом 58 и вторым водилом 60 может предусматриваться упорный подшипник (не показан).
[0109] Обратимся теперь к фиг.8, в одном варианте осуществления удерживающее кольцо 66 водила представляет собой практически круглое кольцо, имеющее сторону реакции 98, образованную на внутренней поверхности. Удерживающее кольцо 66 водила может иметь фланец 100, находящийся на наружной стороне практически круглого кольца. Фланец 100 может предназначаться для соединения, например, с корпусом 26. В одном варианте осуществления удерживающее кольцо 66 водила имеет отверстие 102, расположенное практически между стороной реакции 98 и фланец 100. В некоторых вариантах осуществления сторона реакции 98 выполнена с несколькими крепежными отверстиями 104, предназначенными для вставки в них болтов с заплечиками 94. Фланец 100 может иметь крепежное отверстие 106, предназначенное для крепления удерживающего кольца 66 водила к корпусу 24.
[0110] Перейдем теперь к фиг.9, в одном варианте осуществления серьга 43 может иметь, по меньшей мере, одну вилку 110. Вилка 110 проходит от основания 112. Основание 112 может иметь площадку 114 под установочный винт. Серьга 43 может соединяться с водилом 58 или вторым водилом 60. В одном варианте осуществления основание 112 прикреплено к первому или второму водилу 58, 60, например, установочным винтом (не показан). Вилка 110 может располагаться так, чтобы проходить в отверстие 102. При работе БКП 12, привод 16 может соединяться с вилкой 110 для обеспечения изменения передаточного числа БКП 12. В одном варианте осуществления изменение передаточного числа БКП 12 осуществляется путем поворота второго водила 60 относительно первого водила 58. В некоторых вариантах осуществления изменение передаточного числа БКП 12 осуществляется путем поворота первого водила 58 относительно второго водила 60.
[0111] Обратимся теперь к фиг.10, в одном варианте осуществления водило 58 может быть практически чашеобразным телом, имеющим фланец 120. От фланца 120 могут радиально вовнутрь проходить несколько опорных пальцев 122, чтобы тем самым образовать полость чашеобразного тела. Каждый палец 122 имеет сбоку поверхность реакции 124. Кроме того, каждый палец может иметь крепежное отверстие 126. Крепежное отверстие 126 может позволять соединение крышки 62 первого водила с первым водилом 58. В одном варианте осуществления фланец 120 имеет несколько отверстий 128 и пазов 130. В некоторых вариантах осуществления отверстия 128 и пазы 130 могут располагаться по фланцу 120 таким образом, что каждое отверстие 128 имеет с обоих боков пазы 130 и vice versa. В одном варианте осуществления водило 58 и водило 60 практически аналогичны. В собранном состоянии отверстия 128 на водиле 58 могут совпадать с пазами 130 водила 60 и vice versa. Фланец 120 может иметь надрез 132. Надрез 132 может предназначаться для соединения с серьгой 43. Фланец 120 может иметь отверстие 134 под установочный винт, пересекающее надрез 132 и наружную периферию фланца 120. Отверстие 134 под установочный винт может позволять крепить серьгу 43 к водилу 58, например, установочным винтом (не показан). Водило 58 может иметь несколько отверстий 140 с зазором. В одном варианте осуществления отверстия 140 с зазором предназначены для взаимодействия с каждым из узлов сателлитов с передачей мощности за счет сцепления 54.
[0112] Обратимся теперь к фиг.11-12В, в одном варианте осуществления узел сателлита с передачей мощности за счет сцепления 54 содержит практически сферический сателлит с передачей мощности за счет сцепления 150, имеющий центральное отверстие. Сателлит с передачей мощности за счет сцепления 150 может функционально соединяться с осью 70 сателлита посредством подшипников 152. В некоторых вариантах осуществления с осью сателлита 70 может соединяться и располагаться между подшипниками 152 распорная втулка 154. Ось 70 сателлита на каждом конце может соединяться с опорами 68. С каждой осью 70 сателлита может функционально соединяться ролик реакции смещения 156. Шарик реакции переключения 158 может вдавливаться в отверстие 160, выполненное на каждом торце оси 70 сателлита. С каждой опорой 68 может функционально соединяться ролик кулачка переключения 162. Ролик кулачка переключения 162 может соединяться с осью 164 ролика кулачка переключения. Ось 164 ролика кулачка переключения может входить в отверстие 166 под ось ролика кулачка переключения, выполненное на опоре 68. Ролик кулачка переключения 162 может располагаться в пазу 168, выполненном на одном конце опоры 68. В одном варианте осуществления паз 168 практически перпендикулярен отверстию 166 под ось ролика кулачка переключения. Опора 68 может иметь отверстие 170 под ось сателлита. Отверстие 170 под ось сателлита может быть выполнено в опоре 68 на ее конце, противоположном концу с пазом 166. Опора 68 может иметь заплечик 172 с зазором под ролик реакции смещения. Опора 68 может иметь сторону 174, имеющую угловое сужение, если смотреть в плоскости страницы фиг.12 В. В одном варианте осуществления сторона 174 имеет угол 176 относительно вертикали примерно 5-10 градусов.
[0113] Обратимся теперь к фиг.13 и 14, в одном варианте осуществления узел солнца с передачей мощности за счет сцепления 56 содержит солнце с передачей мощности за счет сцепления 180, функционально связанное с первым и вторым кулачками переключения 74 и 76. Кулачки переключения 74 и 76 могут располагаться практически по бокам солнца с передачей мощности за счет сцепления 180. В одном варианте осуществления кулачки переключения 74 и 76 являются практически идентичными. Узел солнца с передачей мощности за счет сцепления 56 может содержать набор подшипников 184. Каждый подшипник 184 может соединяться с кольцом 186 подшипника. Кольцо 186 подшипника конструктивно исполнено таким образом, что опирается на заплечик 188, выполненный на внутренней стороне солнца с передачей мощности за счет сцепления 180. В одном варианте осуществления кольца 186 подшипников соединяются пружиной 190. Пружина 190 может обеспечивать осевой предварительный натяг колец 186 подшипников, тем самым прикладывая усилие осевого предварительного натяга к подшипникам 184 и кулачкам переключения 74 и 76. Узел солнца с передачей мощности за счет сцепления 56 может иметь подшипники 192. Подшипники 192 могут предназначаться для обеспечения соединения узла солнца с передачей мощности за счет сцепления 56 с главным валом 44. В одном варианте осуществления узел солнца с передачей мощности за счет сцепления содержит несколько противоповоротных распорок 194. Каждая противоповоротная распорка 194 может соединяться с кулачками переключения 182. В одном варианте осуществления кулачки переключения 74 и 76 имеют несколько гнезд 196, предназначенных для соединения с протиповоротными распорками 194. Каждая противоповоротная распорка 194 имеет отверстие 198. Каждое гнездо 196 имеет отверстие 200. Отверстия 198 и 200 предназначены для обеспечения соединения противоповоротных вставок 194 с кулачком переключения 74. В одном варианте осуществления кулачок переключения 74 может представлять собой практически дискообразное тело, имеющее заплечик 202, выступающий с одного конца. Кольцо 204 подшипника может предусматриваться на заплечике 202. Кольцо 204 подшипника может предназначаться для соединения с подшипником 184. В некоторых вариантах осуществления кулачок переключения 74 может иметь поверхность 206 кулачка. Поверхность 206 кулачка может иметь практически криволинейный профиль, если смотреть в поперечном сечении в плоскости фиг.14.
[0114] Перейдем теперь к фиг.15, в одном варианте осуществления БКП 1000 может содержать корпус 1002, соединенный с крышкой 1004 корпуса. Корпус 1002 и крышка 1004 корпуса могут конструктивно исполняться таким образом, чтобы функционально соединяться с узлом вариатора 1006 и заключать его в себе. Узел вариатора 1006 может соединяться с первым кольцом 1008, действующим за счет сцепления, и вторым кольцом 1010, действующим за счет сцепления. Первое кольцо 1008, действующее за счет сцепления, может соединяться с первым узлом нагрузочных кулачковых роликов 1012. Второе кольцо, действующее за счет сцепления 1010, может соединяться со вторым узлом нагрузочных кулачковых роликов 1014. В одном варианте осуществления первый узел нагрузочных кулачковых роликов 1012 соединен с входной ведущей деталью 1016 кулачков. Второй узел нагрузочных кулачковых роликов 1014 может соединяться с выходной ведущей деталью 1018. В одном варианте осуществления входная ведущая деталь 1016 кулачков может соединяться с приводным шкивом 24. Каждый из узлов нагрузочных кулачковых роликов 1012 и 1014 может иметь зубчатую и/или с надрезами наружную периферию, которая может располагаться вблизи каждого из датчиков частоты вращения 18. Узел вариатора 1006 может быть функционально соединен с приводом смещения 16 посредством серьги 43 (фиг.3). В одном варианте осуществления БКП 1000 может содержать главный вал 1020, практически совпадающий с продольной осью 1022 БКП 1000. Главный вал 1020 может иметь отверстие со шпоночными пазами 1025, предназначенное для приема, например, вала генератора переменного тока 14 или любого иного навесного агрегата. Приводной шкив 24 может функционально соединяться с главным валом 1020. В одном варианте осуществления соединение приводного шкива 24 с главным валом 1020 практически идентично соединению приводного шкива 24 с главным валом 44.
[0115] Обратимся к фиг.15-18, в одном варианте осуществления узел вариатора 1006 может содержать несколько узлов сателлитов с передачей мощности за счет сцепления 1024, расположенных на определенном угловом расстоянии вокруг продольной оси 1022. Узел вариатора 1006 может иметь узел солнца с передачей мощности за счет сцепления 1026, расположенный соосно главному валу 1020. Узел солнца с передачей мощности за счет сцепления 1026 может располагаться радиально внутри каждого из узлов сателлитов с передачей мощности за счет сцепления 1024. В одном варианте осуществления узел солнца с передачей мощности за счет сцепления 1026 может выполняться так, чтобы быть практически неподвижным в осевом направлении главного вала 1020. В одном варианте осуществления узел вариатора 1006 может содержать первое водило 1028, функционально связанное со вторым водилом 1030. Первое и второе водила 1028, 1030 служат опорой каждому из узлов сателлитов с передачей мощности за счет сцепления 1024.
[0116] В одном варианте осуществления первое водило 1028 соединено с крышкой 1032 первого водила. Второе водило 1030 может соединяться с крышкой 1034 второго водила. Крышки 1032, 1034 водил выполнены таким образом, чтобы функционально соединяться с узлами сателлитов с передачей мощности за счет сцепления 1024. В одном варианте осуществления узел вариатора 1006 может содержать удерживающее кольцо 1036 водила. Удерживающее кольцо 1036 водила может конструктивно исполняться таким образом, чтобы соединяться с первым и вторым водилами 1028, 1030. Удерживающее кольцо водила 1036 может иметь фланец 1038. Фланец 1038 может соединяться с корпусом 1002 и конструктивно исполняться таким образом, чтобы быть практически неповоротным относительно продольной оси 1022. Удерживающее кольцо 1036 водила может иметь отверстие 1040, через которое может вставляться серьга 43 для соединения, например, со вторым водилом 1030. Могут предусматриваться несколько болтов с заплечиками 1042, чтобы функционально соединять первое и второе водила 1028, 1030 с удерживающим кольцом 1036 водила. Соединение первого и второго водил 1028, 1030 с удерживающим кольцом 1036 водила может выполняться практически так же, как и соединение первого и второго водил 58, 60 с удерживающим кольцом 66 водила (фиг.7).
[0117] При работе БКП 1000, подводимая мощность может подаваться на приводной шкив 24, например, ремнем или цепью (не показаны). Приводной шкив 24 передает подводимую мощность на входную ведущая деталь 1016 кулачков. Входная ведущая деталь 1016 кулачков может передавать мощность на первое кольцо 1008, действующее за счет сцепления, через первый узел нагрузочных кулачковых роликов 1012. Первое кольцо 1008, действующее за счет сцепления, передает мощность на каждый из узлов сателлитов с передачей мощности за счет сцепления 1024. Каждый из узлов сателлитов с передачей мощности за счет сцепления 1024 доставляет мощность на второе кольцо 1010, действующее за счет сцепления. Второе кольцо 1010, действующее за счет сцепления, доставляет мощность на выходную ведущую деталь 1018. Выходная ведущая деталь 1018 доставляет мощность на главный вал 1020, так что мощность может передаваться из БКП 1000. Переключение передаточного числа частоты вращения на входном валу к частоте вращения на выходном валу и, следовательно, переключение передаточного числа крутящего момента на входном валу к крутящему моменту на выходном валу, сопровождается наклоном оси вращения узлов сателлитов с передачей мощности за счет сцепления 1024 до угла наклона (γ). Наклон оси вращения узлов сателлитов с передачей мощности за счет сцепления 1024 может осуществляться за счет поворота первого водила 1028 относительно второго водила 1030. Поворот первого водила 1028 относительно второго водила 1030 создает состояние смещения типа, описанного в заявке на патент США 12/198 402, поданной 26 августа 2008 года, описание которой, в качестве ссылки, включено в настоящее описание. Состояние смещения может придаваться узлам сателлитам с передачей мощности за счет сцепления 1024 в результате двух событий, происходящих отдельно или в сочетании. Одно событие - это изменение углового поворота (β) водила 1028, а второе - изменение угла наклона (γ) узлов сателлитов с передачей мощности за счет сцепления 1024. При постоянном угловом повороте (β) водила 1028 состояние смещения может приближаться к состоянию нулевого угла смещения при наклоне оси вращения узлов сателлитов с передачей мощности за счет сцепления 1024. При достижении состояния нулевого угла смещения ось вращения узлов сателлитов с передачей мощности за счет сцепления 1024 может прекратить наклон. Состояние нулевого смещения - это состояние равновесия для угла наклона (γ).
[0118] По-прежнему рассматриваем фиг.15-18, в одном варианте осуществления узел солнца с передачей мощности за счет сцепления 1026 может содержать солнце с передачей мощности за счет сцепления 1044, функционально связанное с первой и второй опорами 1046 солнца с передачей мощности за счет сцепления с подшипниками, например. Опоры 1046 солнца с передачей мощности за счет сцепления могут конструктивно исполняться таким образом, чтобы контактировать с первым и вторым водилами 1028, 1030. Первое и второе водила 1028, 1030 могут ограничивать осевое движение узла солнца с передачей мощности за счет сцепления 1044. В одном варианте осуществления опоры 1046 солнца с передачей мощности за счет сцепления могут соединяться с волнистыми (полосовыми) пружинами (не показаны), расположенными между опорами 1046 солнца с передачей мощности за счет сцепления с первым и вторым водилами 1028, 1030. Эти волнистые (полосовые) пружины могут срабатывать при работе БКП 1000 для обеспечения минимального осевого хода узла солнца с передачей мощности за счет сцепления 1026. В некоторых вариантах осуществления опоры 1046 солнца с передачей мощности за счет сцепления соединены с первым и вторым водилами 1028 и 1030 посредством ходового винта (не показан), и при этом поворот любого - первого или второго - водила 1029, 1030 вызывает осевое смещение узла солнца с передачей мощности за счет сцепления 1026. В других вариантах осуществления привод (не показан) может соединяться с узлом солнца с передачей мощности за счет сцепления 1026, чтобы обеспечивать изменение осевого положения узла солнца с передачей мощности за счет сцепления 1026, исходя, по меньшей мере, частично, из угла наклона (γ) узлов сателлитов с передачей мощности за счет сцепления 1024 БКП 1000. В еще одних вариантах осуществления привод (не показан) может соединяться с узлом солнца с передачей мощности за счет сцепления 1026, чтобы обеспечить изменение осевого положения узла солнца с передачей мощности за счет сцепления 1026, практически произвольное относительно угла наклона (γ) узлов сателлитов с передачей мощности за счет сцепления 1024. Вышеупомянутые способы осевого позиционирования узла солнца с передачей мощности за счет сцепления 1026 могут продлить предполагаемый срок службы солнца с передачей мощности за счет сцепления 1044, например, за счет распределения рабочих нагрузок на большей площади поверхности солнца с передачей мощности за счет сцепления 1044 по сравнению с достижимой иным образом.
[0119] Обратимся теперь к фиг.19-21С, в одном варианте осуществления первое водило 1028 может иметь несколько радиально смещенных пазов 1050. Второе водило 1030 может иметь несколько радиальных пазов 1052. На фиг.19 радиальные пазы 1052 показаны пунктирными линиями. Размеры радиально смещенных пазов 1050 и радиальных пазов 1052 выбраны такими, чтобы вмещать некоторые компоненты узлов сателлитов с передачей мощности за счет сцепления 1024, например, ролик реакции смещения 1100 (фиг.22). В целях обсуждения размещение радиально смещенных пазов 1050 относительно радиальных пазов 1052 можно показать как выступы в плоскости, перпендикулярной продольной оси 1022. Продольная ось 1022 перпендикулярна плоскости страницы фиг.19. Радиальная линия построения 1054 может быть показана перпендикулярно продольной оси 1022. Линия построения 1054 проходит в радиальном направлении через центр 1056 первого и второго водил 1028, 1030. Подобным образом, через центр 1056 может проходить и вторая линия построения 1058. Линия построения 1058 практически делит пополам радиальные пазы 1052. Радиально смещенная линия построения 1060 параллельна линии построения 1054. Радиально смещенная линия построения 1060 перпендикулярна продольной оси 1022. От линии построения 1054 радиально смещенную линию построения 1060 отделяет расстояние смещения 1062. В одном варианте осуществления расстояние смещения 1062 равно примерно 5-20 мм. В некоторых вариантах осуществления расстояние смещения 1062 равно 16-18 мм. В некоторых вариантах осуществления расстояние смещения 1062 пропорционально ширине радиально смещенного паза 1050. Например, расстояние смещения 1062 может быть примерно равным ширине радиально смещенного паза 1050. Радиально смещенная линия построения 1060 практически делит пополам радиально смещенный паз 1050. Радиально смещенная линия построения 1060 пересекает вторую линию построения 1058 и при этом образует угол 1064 (иногда в настоящем описании именуемый как ψ). В одном варианте осуществления для состояний, в которых узлы сателлитов с передачей мощности за счет сцепления 1024 находятся под углом наклона (γ), практически равным нулю, угол (ψ) 1064 может быть в пределах 5-45 градусов. Предпочтительно, когда узлы сателлитов с передачей мощности за счет сцепления 1024 находятся под углом наклона (γ), практически равным нулю, угол (ψ) 1064 находится в пределах 10-20 градусов.
[0120] По-прежнему обращаемся к фиг.19, в одном варианте осуществления первое водило 1028 может иметь несколько отверстий 1066 с зазором. Второе водило 1030 может иметь несколько отверстий 1068 с зазором. Отверстия 1066, 1068 с зазором могут выполняться таким образом, чтобы обеспечить зазор каждому из узлов сателлитов с передачей мощности за счет сцепления 1024. В одном варианте осуществления отверстие 1066 с зазором больше отверстия 1068 с зазором, чтобы обеспечить дополнительный зазор для узла сателлита с передачей мощности за счет сцепления 1024 при работе БКП 1000.
[0121] Обратимся теперь к фиг.20А-20С, в одном варианте осуществления первое водило 1028 может быть практически чашеобразным телом, имеющим центральное отверстие 1070 и фланец 1072 по наружной периферии чашеобразного тела. Фланец 1072 может иметь несколько отверстий 1074 и несколько пазов 1076. Отверстия 1074 и пазы 1076 могут конструктивно исполняться таким образом, чтобы обеспечивать соединение первого водила 1028 со вторым водилом 1030, например, болтами с заплечиками 1042, таким образом, чтобы допускать относительный поворот между водилами 1028, 1030 и одновременно обеспечивать блокирование осевого перемещения. Первое водило 1028 может иметь заплечик реакции 1078, расположенный вокруг центрального отверстия 1070. В одном варианте осуществления заплечик реакции 1078 может конструктивно исполняться таким образом, чтобы контактировать с опорой 1046 солнца с передачей мощности за счет сцепления. Фланец 1072 может иметь надрез 1080. Надрез 1080 может предназначаться для обеспечения соединения первого водила 1028 с серьгой 43. Первое водило 1028 может иметь несколько отверстий 1082, расположенных на нижней стороне чаше подобного тела. Отверстия 1082 могут выполняться для обеспечения соединения крышки 1032 первого водила с первым водилом 1028. В одном варианте осуществления каждый радиальный паз 1050 имеет поверхность реакции 1084. Поверхности реакции 1084 предназначены для обеспечения соединения первого водила 1028 с узлами сателлитов с передачей мощности за счет сцепления 1024.
[0122] Обратимся к фиг.21A-21D, линия построения 1058 может образовывать со смещенной линией построения 1060 угол (ψ) 1064. При работе БКП 1000 водила 1028, 1030 могут вращаться вокруг продольной оси 1022. Смещенная линия построения 1060 следует за первым водилом 1028, а линия построения 1058 следует за вторым водилом 1030. Для доходчивости линии построения 1058 и 1060 показаны на фиг.21 В-21D для трех угловых положений поворота вокруг продольной оси, например, второго водила 1030 относительно первого водила 1028 (это относительное угловое положение поворота иногда в настоящем описании называется β). При вращении водил 1028, 1030 относительно друг друга угол (ψ) 1064 может изменяться, и место пересечения 1063 может перемещаться радиально относительно линии построения 1058. Например, угол 10640, показанный на фиг.21 В, меньше угла 10641, показанного на фиг.21D. Угол 10640 образуется между линией построения 1058 и линией построения 1060, когда угол наклона (γ) меньше нуля. Угол 10641 образуется между линией построения 1058 и линией построения 1060, когда угол наклона (γ) больше нуля. В некоторых вариантах осуществления место водил 1028, 1030 может меняться местами в БКП 1000. Эта перестановка может изменить зависимость, осуществленную на фиг.21. Место пересечения 1063 может быть показано на пересечении между смещенной линией построения 1060 и линией построения 1058. Место пересечения 1063 обычно соответствует углу смещения, равному нулю, или "состоянию нулевого смещения" для узлов сателлитов с передачей мощности за счет сцепления 1024 при постоянном угле наклона (γ). Величина изменения угла (ψ) 1064 служит иногда указанием устойчивости угла наклона (γ) узлов сателлитов с передачей мощности за счет сцепления 1024 при работе. Высокое значение для угла (ψ) 1064 обычно является более устойчивым и обеспечивает более медленное переключение, чем низкое значение угла, которое обычно менее устойчиво и обеспечивает более быстрое переключение.
[0123] Обратимся теперь конкретно к фиг.21Е-21Н, в одном варианте осуществления радиально смещенный паз 1051 может иметь криволинейный профиль, который обычно соответствует линии построения 1059. В некоторых вариантах осуществления водило 1028 может иметь радиально смещенные пазы 1051. Кривизна линии построения 1059 и, следовательно, кривизна радиально смещенного паза 1051 могут быть такими, чтобы обеспечить требуемую устойчивость управления и отклика БКП 1000. В иллюстративных целях линия построения 1061 может быть показана касательной к линии построения 1059 в месте пересечения 1065. Место пересечения 1065 обычно находится на пересечении между линиями построения 1058 и 1059. Угол (ψ) 1064 показан на фиг.21Е между линиями построения 1058 и 1061. В некоторых вариантах осуществления кривизна линии построения 1059 может выполняться таким образом, чтобы обеспечить постоянный угол (ψ) 1064 между линиями построения 1058 и 1061 при повороте водила 1028 относительно водила 1030 на угол β вокруг продольной оси. Для доходчивости на фиг.21F-21H показаны линии построения 1058, 1059 и 1061 для трех угловых положений поворота (β). При повороте водил 1028, 1030 относительно друг друга угол (ψ) 1064 остается постоянным, а место пересечения 1065 может перемещаться в радиальном направлении относительно линии построения 1058. В некоторых вариантах осуществления угол (ψ) 1064 может произвольно изменяться между состояниями угла наклона (γ), показанными на фиг.21F-21H. Варьирование угла построения 1064 может выбираться таким образом, чтобы оптимизировать условия управления БКП 1000. Результирующий путь линии построения 1059 можно сформулировать, используя методы, доступные специалистам в соответствующей области техники.
[0124] Обратимся теперь к Фиг.22, в одном варианте осуществления узел сателлит с передачей мощности за счет сцепления 1024 содержит практически сферический сателлит с передачей мощности за счет сцепления 1090, имеющий центральное отверстие. Сателлит 1090 может функционально соединяться с осью 1092 сателлита посредством, например, подшипников 1094. В одном варианте осуществления между подшипниками 1094 может располагаться распорная втулка 1096. В некоторых вариантах осуществления распорная втулка 1096 выполнена как одно целое с подшипниками 1094. Подшипники 1094 могут удерживаться на оси 1092 сателлита кольцами 1098. В некоторых вариантах осуществления кольца 1098 могут выполняться как одно целое с подшипником 1094. В одном варианте осуществления узел сателлита с передачей мощности за счет сцепления 1024 может содержать ролик реакции смещения 1100, соединенный с каждым концом оси 1092 сателлита. Ролик реакции смещения 1100 может удерживаться на оси 1092 сателлита кольцом 1101. В одном варианте осуществления кольцо 1101 может крепиться к оси 1092 сателлита тугой посадкой или иным подходящим средством крепления. В других вариантах осуществления кольцо 1101 может удерживаться крышками 1032 и 1034 водила (фиг.15). Каждый торец оси 1092 сателлита может выполняться таким образом, чтобы в него входил шарик реакции переключения 1102. В одном варианте осуществления шарик реакции переключения 1102 вдавливается в отверстие 1103, выполненное на каждом торце оси 1092 сателлита. В некоторых вариантах осуществления при работе БКП 1000 шарик реакции переключения 1102 может касаться крышки 1032 первого водила или крышки 1034 второго водила.
[0125] Перейдем теперь к фиг.23 и 24, в одном варианте осуществления корпус 1002 может быть практически чашеобразным телом 1109, имеющим фланец 1110, выполненный на первом конце, и ступицу подачи смазки 1112, выполненную на втором конце. Фланец 1110 может конструктивно исполняться таким образом, чтобы крепиться к некоей опорной конструкции, например, к крышке 23 шкива. Ступица подачи смазки 1112 может иметь канал смазки 1113. Канал смазки 1113 может конструктивно исполняться таким образом, чтобы подключаться к внешнему насосу (не показан). Корпус 1002 может иметь ступицу 1114 для установки датчика, расположенную на наружной стороне чашеобразного тела 1009. Ступица 1114 для установки датчика может позволять устанавливать, например, датчики частоты вращения 18. Датчик частоты вращения 18 может вставляться в отверстие для доступа 1115 для дальнейшей установки датчика частоты вращения 18 вблизи узла нагрузочных кулачковых роликов 1012. В одном варианте осуществления корпус 1002 может содержать емкость для смазки 1116, прикрепленную к наружной стороне чашеобразного тела 1009 на установочной поверхности 1117. Емкость для смазки 1116 может иметь несколько ребер 1118. Ребра 1118 при работе, например, БКП 12 могут обеспечивать передачу тепла от смазки в окружающий воздух при работе. Кроме того, емкость для смазки 1116 может иметь канал смазки 1119. В некоторых вариантах осуществления канал смазки 1119 конструктивно исполнен таким образом, чтобы подключаться к внешнему насосу (не показан). В одном варианте осуществления корпус 1002 может иметь ступицу для установки на привода 1120, расположенную на наружной стороне чашеобразного тела 1009. Ступица для установки на приводе 1120 может конструктивно исполняться таким образом, чтобы крепиться, например, к приводу 16. Ступица для установки на приводе может предназначаться для обеспечения соединения привода 16, например, с серьгой 43.
[0126] Обратимся теперь к фиг.25. В одном варианте осуществления процесс управления на основании смещения 2000 могут реализовывать, например, в микропроцессоре в сообщении аппаратными средствами силовой электроники БКП 1000. В некоторых вариантах осуществления процесс управления на основании смещения 2000 могут реализовывать в микропроцессоре в сообщении с БКП 12 или иными вариантами осуществления БКП, описанными в настоящей заявке. Процесс управления на основании смещения 2000 начинают в блоке 2002. Затем в процессе управления на основании смещения 2000 переходят в блок 2004, где получают уставку требуемого передаточного числа по частоте вращения БКП 1000. В одном варианте осуществления уставку требуемого передаточного числа по частоте вращения получают от поля. В некоторых вариантах осуществления уставку требуемого передаточного числа по частоте вращения получают из заданной карты (таблицы), находящейся в памяти контроллера (например, см. фиг.28А). Процесс управления на основании смещения 2000 продолжают в блок 2006, где определяют угловой поворот вокруг продольной оси, например, второго водила 1030 относительно первого водила 1028 (β). Затем в процессе управления на основании смещения 2000 переходят к подпроцессу привода 2008, в котором угловой поворот (β) прикладывают к водилу 1028, например. После завершения подпроцесса привода 2008 в процессе управления на основании смещения 2000 переходят к блоку 2009, в котором измеряют фактическое передаточное число по частоте вращения БКП 1000. В одном варианте осуществления фактическое передаточное число по частоте вращения БКП 1000 могут определять путем измерения частоты вращения, например, узлов нагрузочных кулачковых роликов 1012 и 1014 или любого иного компонента, индикативной для частоты вращения на входном валу и частоты вращения на выходном валу БКП 1000. В некоторых вариантах осуществления фактическое передаточное число по частоте вращения могут рассчитывать, основываясь при этом, по меньшей мере, частично, на условии целевой частоты вращения на выходном валу или основываясь при этом, по меньшей мере, частично, на условии целевой частоты вращения на входном валу. В других вариантах осуществления фактическое передаточное число по частоте вращения БКП 1000 могут определять путем измерения угла наклона (γ) оси 1092 сателлита. В еще одних вариантах осуществления фактическое передаточное число по частоте вращения БКП 1000 могут определять путем измерения фактического передаточного числа по крутящему моменту БКП 1000. Фактическое передаточное число по крутящему моменту БКП 1000 могут определять путем измерения крутящего момента, например, колец с передачей мощности за счет сцепления 1008 и 1010, или любого иного компонента, индикативного для крутящего момента на входном валу и крутящего момента на выходном валу БКП 1000. В некоторых вариантах осуществления крутящий момент, индикативный для крутящего момента на входном валу и крутящего момента на выходном валу, могут определять путем измерения крутящего момента на первом водиле 1028 и втором водиле 1030 соответственно. Затем в процессе управления на основании смещения 2000 переходят к блоку решения 2010, где измеренное передаточное число по частоте вращения сравнивают с требуемым передаточным числом по частоте вращения, чтобы тем самым сформировать значение сравнения. Если измеренное передаточное число по частоте вращения не равно уставке требуемого передаточного числа, в процессе управления на основании смещения 2000 возвращаются в блок 2006. Если измеренное передаточное число по частоте вращения равно уставке требуемого передаточного числа, в процессе управления на основании смещения 2000 переходят в блок «Конец» 2012. Процесс управления на основании смещения 2000 оставляют в блоке «Конец» 2012, пока не получат новую уставку передаточного числа по частоте вращения. В некоторых вариантах осуществления процесс управления на основании смещения 2000 конфигурируют таким образом, чтобы работать с разомкнутым контуром; в этом случае блоки 2009 и 2010 в процесс управления на основании смещения 2000 не включают.
[0127] Обратимся к фиг.26. В одном варианте осуществления в блоке 2006 могут использовать справочную таблицу, которая может быть представлена кривой 2007. Кривая 2007 отображает примерную зависимость между угловым поворотом (β) и требуемым передаточным числом по частоте вращения, например, БКП 1000. В блоке 2006 кривую 2007 можно использовать при осуществлении процесса управления на основании смещения 2000 с разомкнутым контуром. Кривая 2007 может описываться ура внением у=Ах2-Вх+С, где у - угловой поворот (β), а х - передаточное число по частоте вращения. В одном варианте осуществления значения А, В и С равны соответственно 0,5962, 4,1645 и 3,536. В некоторых вариантах осуществления значения А, В, и С равны соответственно 0,5304, 4,0838 и 3,507. В других вариантах осуществления значения А, В и С увязаны с размерами и геометрией БКП 1000, например, среди прочего, с положением паза 1050 и 1052 на водилах 1028 и 1030, длина оси 1092 сателлита и размеров колец с передачей мощности за счет сцепления 1008 и 1010. В одном варианте осуществления блок 2006 может включать хорошо известный процесс пропорционально-интегрально-дифференциального (ПИД-)регулирования, подходящий для работы системы управления на основании смещения 2000 с замкнутым контуром. При исполнении с замкнутым контуром в блоке 2006 определяют угловой поворот (β), основываясь при этом, по меньшей мере, частично, на сравнении (иногда именуемом в настоящем описании ошибкой) фактического передаточного числа по частоте вращения и уставки передаточного числа по частоте вращения
[0128] Обратимся к фиг.27, в одном варианте осуществления подпроцесс привода 2008 могут начинать в блоке 2014 и переходить в блок 2015, в котором получают уставку углового поворота (β). Затем в подпроцессе привода 2008 переходят в блок 2016, где определяют сигнал команды приводу на основании, по меньшей мере, частично, углового поворота (β). В одном варианте осуществления для преобразования уставки углового поворота (β) в сигнал команды приводу может использоваться справочная таблица. В некоторых вариантах осуществления в качестве сигнала команды приводу могут использовать напряжение или ток. В других вариантах осуществления как сигнал команды приводу могут использовать изменение положения тросика или рычажного механизма. В некоторых вариантах осуществления для получения сигнала команды приводу по уставке углового поворота (β) могут использовать определенный алгоритм. Затем в подпроцессе привода 2008 переходят к блоку 2017, в котором сигнал команды приводу посылают приводу и связанным с ним аппаратным средствам. В одном варианте осуществления для посылки сигнала команды аппаратным средствам привода могут использовать стандартный последовательный протокол связи. В некоторых вариантах осуществления для передачи сигнала команды аппаратным средствам привода могут использовать тросик или рычажный механизм. В подпроцессе привода 2008 затем переходят в блок 2018, где водило, например, водило 1028, поворачивают. Затем в подпроцессе привода 2008 переходят в блок 2019, где измеряют угловой поворот (β). В подпроцессе привода 2008 затем переходят в блок решения 2020, где измеренный угловой поворот (β) сравнивают с уставкой для углового поворота (β). Если измеренный угловой поворот (β) не равен уставке углового поворота (β), в подпроцессе привода 2008 возвращаются в блок 2016. Если измеренный угловой поворот (β) равен уставке углового поворота (β), подпроцесс привода 2008 затем заканчивают в блоке 2022, причем процесс управления на основании смещения 2000 могут продолжить в блоке 2009, как описано выше со ссылками на фиг.25. В некоторых вариантах осуществления подпроцесс привода 2008 конфигурирован для работы с разомкнутым контуром; в этом случае блоки 2019 и 2020 в подпроцесс 2008 не включены.
[0129] Перейдем теперь к фиг.28А, в одном варианте осуществления система управления 2050 может конфигурироваться таким образом, чтобы управлять БКП 2051, соединенную с первичным движителем 2052 и нагрузкой 2053. БКП 2051 может конструктивно исполняться таким образом, чтобы вмещать в себя систему управления на основании смещения. В некоторых вариантах осуществления БКП 2051 практически аналогична БКП 12 и/или БКП 1000. БКП 2051 может соединяться с приводом смещения 2054. В одном варианте осуществления привод смещения 2054 может быть практически аналогичным, например, приводу смещения 16. В некоторых вариантах осуществления приводом смещения 2054 является сервопривод. В других вариантах осуществления приводом смещения 2054 может быть механический рычаг (не показан). В еще одном варианте осуществления приводом смещения 2054 может быть гидравлический или электрогидравлический привод (не показан). Система управления 2050 может содержать несколько датчиков 2055 в электрической и/или механической связи с БКП 2051, блок управления 2056 и блок управления на основании смещения 2057. В некоторых вариантах осуществления датчики 2055 могут быть в сообщении с первичным движителем 2052, нагрузкой 2053 и/или приводом 2054. Датчики 2055 находятся в сообщений с блоком управления 2056. В одном варианте осуществления блок управления 2056 сообщается с приводом смещения 2054. Блок управления 2056 может конструктивно исполняться таким образом, чтобы сообщаться с блоком управления на основании смещения 2057. В одном варианте осуществления блок управления на основании смещения 2057 предназначен для выполнения процесса управления на основании смещения 2000. В некоторых вариантах осуществления блок управления 2056 сообщается с блоком отображения данных 2058, предназначенным для пользовательского интерфейса управления с использованием одного или нескольких дисплеев и/или устройств ввода (не показаны).
[0130] Специалистам в данной области ясно, что различные иллюстративные логические и иные блоки, схемы и стадии алгоритма, описываемые в связи с вариантами осуществления, раскрытыми в настоящем описании, в том числе со ссылками на систему управления 2050, могут реализоваться как электронными аппаратными средствами, программным обеспечением, хранимым на читаемом компьютером носителе и исполняемым процессором, или как сочетания тех и других. Для того чтобы четко проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, схемы и стадии описаны выше в целом в части их функциональности. Реализовываться эта функциональность может как аппаратными средствами, так и программным обеспечением, это зависит от конкретного применения и конструктивных ограничений, налагаемых на систему в целом. Специалисты в данной области могут реализовать описанную функциональность различными путями для каждого конкретного применения, но эта реализация не должна интерпретироваться как отступление от объема настоящего изобретения. Например, различные иллюстративные логические и иные блоки и схемы, описанные в связи вариантами осуществления, раскрытыми в настоящем описании, могут реализовываться или осуществляться с использованием универсального процессора, процессора обработки цифровых сигналов (ПОЦС), интегральной схемы (ИС), спроектированной под специальное приложение, программируемой пользователем вентильной матрицы (ППВМ) или иного программируемого логического устройства (ПЛУ), дискретной вентильной или транзисторной логики, компонентов дискретных аппаратных средств или их любого сочетания, рассчитанных для выполнения функций, описанных в настоящем описании. Универсальным процессором может быть микропроцессор, но в альтернативе процессором может быть любой обычный процессор, контроллер, микроконтроллер или конечный автомат. Кроме того, процессор может реализовываться как сочетание вычислительных устройств, например, сочетание ПОЦС и микропроцессора, несколько микропроцессоров, один или несколько микропроцессоров в сочетании с ядром ПОЦС или любую подобную конфигурацию. Программное обеспечение, связанное с этими блоками, может храниться в памяти оперативного запоминающего устройства (ОЗУ), флэш-памяти, памяти постоянного запоминающего устройства (ПЗУ), памяти стираемого программируемого постоянного запоминающего устройства (СПЗУ), памяти электрически стираемого программируемого постоянного запоминающего устройства (ЭСППЗУ), регистрах, на жестком диске, сменном диске, CD-ROM или любом ином подходящем виде известной запоминающей среды. Одна примерная запоминающая среда связана с процессором так, что процессор может считывать информацию с запоминающей среды и записывать информацию на нее. В альтернативе, запоминающая среда может объединяться с процессором. Процессор и запоминающая среда могут находиться в ИС, спроектированной под специальное приложение. Например, в одном варианте осуществления блок управления 2056 содержит процессор (не показан). Кроме того, процессор блока управления 2056 может конфигурироваться для выполнения функций, описанных в настоящем описании со ссылками на один или оба блока управления на основании смещения 2057 и блока отображения данных 2058.
[0131] Обратимся к фиг.28В, в одном варианте осуществления привод смещения 2054 может содержать гидравлический поршень 2060, связанный с гидрораспределителем 2061. Гидравлический поршень 2060 может соединяться, например, с серьгой 43. Гидрораспределитель 2061 может создавать давление в каналах 2062 и 2063, которое может обеспечивать перемещение гидравлического поршня 2060 и, следовательно, серьги 43. Привод смещения 2054 может содержать насос 2064 в сообщении по текучей среде с емкостью 2065. Насос 2064 может подавать текучую среду системы управления под давлением в предохранительный клапан 2066 и привод 2067, которые предназначены для подачи текучей среды системы управления под давлением в гидрораспределитель 2061. В некоторых вариантах осуществления гидрораспределитель 2061 представляет собой четырехходовый гидрораспределитель, который может сообщаться с приводом 2068 золотника. Привод 2068 золотника может предназначаться для регулирования гидрораспределителя 2061 в зависимости, по меньшей мере, частично, от требуемого состояния смещения БКП 1000, например. В одном варианте осуществления привод 2068 золотника может представлять собой электронный сервопривод (не показан). В некоторых вариантах осуществления привод 2068 золотника может представлять собой ручной рычаг (не показан). В других вариантах осуществления гидрораспределитель 2061 может иметь перемещаемый корпус для обеспечения регулировки каналов 2069 относительно внутреннего золотника (не показан). Перемещаемый корпус может конструктивно исполняться таким образом, чтобы вносить поправки на установившиеся ошибки, которые могут произойти при работе привода смещения 2054 или при работе БКП 1000.
[0132] Обратимся теперь к фиг.29А, в одном варианте осуществления блок управления 2056 содержит устройство управления 2070, связевое устройство 2072 и микропроцессор 2074. В некоторых вариантах осуществления устройство управления 2070 может конструктивно исполняться таким образом, чтобы выполнять процесс управления так, как хорошо известный процесс управления коэффициентом передачи пропорционального / интегрального регулятора, в зависимости от сигнала уставки 2076 и сигнала обратной связи 2078. В одном варианте осуществления сигнал уставки 2076 может конфигурироваться таким образом, чтобы представлять требуемую частоту вращения на входном валу. В некоторых вариантах осуществления сигнал уставки 2076 может конфигурироваться таким образом, чтобы представлять требуемое передаточное число по частоте вращения, например, БКП 2051. В других вариантах осуществления сигнал уставки 2076 может конфигурироваться таким образом, чтобы представлять требуемую частоту вращения на выходном валу, требуемый крутящий момент на входном валу и/или требуемый крутящий момент на выходном валу, или любую иную требуемую Рабочую характеристику БКП 2051. Сигнал обратной связи 2078 может конфигурироваться таким образом, чтобы давать указание текущего рабочего состояния БКП 2051. В одном варианте осуществления сигнал обратной связи 2078 может конфигурироваться таким образом, чтобы представлять фактическую частоту вращения БКП 2051. В некоторых вариантах осуществления сигнал обратной связи 2078 может конфигурироваться таким образом, чтобы представлять фактическое передаточное число по частоте вращения БКП 2051. В других вариантах осуществления сигнал обратной связи 2078 может конфигурироваться таким образом, чтобы давать указание фактической частоты вращения на выходном валу, фактического крутящего момента на выходном валу и/или фактического крутящего момента на входном валу БКП 2051. Устройство управления 2070 может выполняться таким образом, чтобы взаимодействовать со связевым устройством 2072. Связевое устройство 2072 может содержать связевые аппаратные средства, такие, как последовательные устройства, например, устройства RS232, устройства USB или иные хорошо известные связевые аппаратные средства. Связевое устройство 2072 может взаимодействовать с микропроцессором 2074. Микропроцессор 2074 может выдавать сигнал команды приводу 2080 на основании, по меньшей мере, частично, сигнала уставки 2076 и/или сигнала обратной связи 2078. В одном варианте осуществления микропроцессор 2074 содержит аппаратные средства, предназначенные для работы силовой электроники в сообщении с любым одним или несколькими приводами смещения 2054, БКП 2051, первичным движителем 2052 и/или нагрузкой 2053.
[0133] Обратимся теперь к фиг.29В, в одном варианте осуществления процесс управления на основании смещения 2100 могут реализовывать, например, в микропроцессоре в сообщении аппаратными средствами силовой электроники БКП 1000. В некоторых вариантах осуществления процесс управления на основании смещения 2000 могут реализовывать в микропроцессоре в сообщении с БКП 12 или иными вариантами осуществления БКП, описанными в настоящей заявке. Процесс управления на основании смещения 2100 начинают в блоке 2101. Затем в процессе управления на основании смещения 2100 переходят в блок 2102, где получают требуемую уставку угла наклона (у) для узлов сателлитов с передачей мощности за счет сцепления 1024 БКП 1000, например. Процесс управления на основании смещения 2100 продолжают в блоке 2103, где определяют сигнал команды для привода смещения. В одном варианте осуществления сигнал команды определяют хорошо известным процессом регулировки усиления (иногда именуемым также как "ПИ" или "ПИД"). Затем в процессе управления на основании смещения 2100 переходят в подпроцесс привода 2104, в котором сигнал команды подают на привод смещения 2054, например. После завершения подпроцесса привода 2104 в процессе управления на основании смещения 2100 переходят в блок 2105, где измеряют угол наклона (γ) узла сателлита с передачей мощности за счет сцепления 1024. В одном варианте осуществления фактический угол наклона (γ) узла сателлита с передачей мощности за счет сцепления 1024 могут определять с помощью бесконтактного датчика или иного устройства, предназначенного для дачи указания фактического угла наклона (γ) узлов сателлитов с передачей мощности за счет сцепления 1024. Затем в процессе управления на основании смещения 2100 переходят к блоку решения 2106, где измеренный угол наклона (γ) сравнивают с требуемой уставкой угла наклона (γ), чтобы тем самым получить значение сравнения. Если измеренный угол наклона (γ) не равен требуемой уставке угла наклона (γ), в процессе управления на основании смещения 2100 возвращают в блок 2103. Если измеренный угол наклона (γ) равен требуемой уставке угла наклона (γ), в процессе управления на основании смещения 2100 переходят в блок «Конец» 2107. Процесс управления на основании смещения 2100 оставляют в блоке «Конец» 2107, пока не получат новую уставку угла наклона (γ). В некоторых вариантах осуществления процесс управления на основании смещения 2100 конфигурируют таким образом, чтобы работать с разомкнутым контуром; в этом случае блоки 2105 и 2106 в процесс управления на основании смещения 2100 не включают.
[0134] Обратимся теперь к фиг.29С, в одном варианте осуществления процесс управления на основании смещения 2110 могут реализовывать, например, в микропроцессоре в сообщении аппаратными средствами силовой электроники БКП 1000. В некоторых вариантах осуществления процесс управления на основании смещения 2110 могут реализовывать в микропроцессоре в сообщении с БКП 12 или иными вариантами осуществления БКП, описанными в настоящей заявке. Процесс управления на основании смещения 2110 начинают в блоке 2111. Затем в процессе управления на основании смещения 2110 переходят в блок 2112, где получают требуемую уставку частоты вращения на выходном валу БКП 1000. Процесс управления на основании смещения 2110 продолжают в блоке 2113, где определяют сигнал команды для привода смещения. В одном варианте осуществления сигнал команды определяют хорошо известным процессом ПИ-регулирования. Затем в процессе управления на основании смещения 2110 переходят в подпроцесс привода 2114, в котором сигнал команды подают на привод смещения 2054, например. После завершения подпроцесса привода 2114 в процессе управления на основании смещения 2110 переходят в блок 2115, где измеряют частоту вращения на выходном валу БКП 1000. В одном варианте осуществления частоту вращения на выходном валу БКП 1000 могут определять с помощью датчика частоты вращения, предназначенного для измерения частоты вращения, индикативной для частоты вращения на выходном валу БКП 1000. Затем в процессе управления на основании смещения 2110 переходят к блоку решения 2116, где измеренную частоту вращения на выходном валу сравнивают с требуемой уставкой частоты вращения на выходном валу, чтобы тем самым получить значение сравнения. Если измеренная частота вращения на выходном валу не равна требуемой уставке частоты вращения на выходном валу, процесс управления на основании смещения 2110 возвращают в блок 2113. Если измеренная частота вращения на выходном валу равна требуемой уставке частоты вращения на выходном валу, в процессе управления на основании смещения 2110 переходят в блок «Конец» 2117. Процесс управления на основании смещения 2110 оставляют в блоке «Конец» 2117, пока не получат новую уставку частоты вращения на выходном валу. В некоторых вариантах осуществления процесс управления на основании смещения 2110 конфигурируют таким образом, чтобы работать с разомкнутым контуром; в этом случае блоки 2115 и 2116 в процесс управления на основании смещения 2110 не включают.
[0135] Обратимся теперь к Фиг.29D, в одном варианте осуществления процесс управления на основании смещения 2120 могут реализовывать, например, в микропроцессоре в сообщении аппаратными средствами силовой электроники БКП 1000. В некоторых вариантах осуществления процесс управления на основании смещения 2120 могут реализовывать в микропроцессоре в сообщении с БКП 12 или иными вариантами осуществления БКП, описанными в настоящей заявке. Процесс управления на основании смещения 2120 начинают в блоке 2121. Затем в процессе управления на основании смещения 2120 переходят в блок 2122, где получают требуемую уставку частоты вращения на входном валу БКП 1000. Процесс управления на основании смещения 2120 продолжают в блоке 2123, где определяют сигнал команды для привода смещения. В одном варианте осуществления сигнал команды определяют хорошо известным процессом ПИ-регулирования. Затем в процессе управления на основании смещения 2120 переходят в подпроцесс привода 2124, в котором сигнал команды подают на привод смещения 2054, например. После завершения подпроцесса привода 2124 в процессе управления на основании смещения 2120 переходят в блок 2125, где измеряют частоту вращения на входном валу БКП 1000. В одном варианте осуществления частоту вращения на выходном валу БКП 1000 могут определять с помощью датчика частоты вращения, предназначенного для измерения частоты вращения, индикативной для частоты вращения на входном валу БКП 1000. Затем в процессе управления на основании смещения 2120 переходят к блоку решения 2126, где измеренную частоту вращения на входном валу сравнивают требуемой уставкой частоты вращения на входном валу, чтобы тем самым получить значение сравнения. Если измеренная частота вращения на входном валу не равна требуемой уставке частоты вращения на входном валу, процесс управления на основании смещения 2120 возвращают в блок 2123. Если измеренная частота вращения на входном валу равна требуемой уставке частоты вращения на входном валу, в процессе управления на основании смещения 2120 переходят в блок «Конец» 2127. Процесс управления на основании смещения 2120 оставляют в блоке «Конец» 2127, пока не получат новую уставку частоты вращения на входном валу. В некоторых вариантах осуществления процесс управления на основании смещения 2120 конфигурируют таким образом, чтобы работать с разомкнутым контуром; в этом случае блоки 2125 и 2126 в процесс управления на основании смещения 2120 не включают.
[0136] Перейдем теперь к Фиг.30-33, в одном варианте осуществления БКП 3000 может содержать первый корпусный элемент 3002, соединенный со вторым корпусным элементом 3004. Первый корпусный элемент 3002 может иметь на первом конце фланец 3006. Фланец 3006 может позволять крепить БКП 3000, например, к приводному электрическому двигателю (не показан). В некоторых вариантах осуществления БКП 3000 может соединяться с коленчатым валом двигателя внутреннего сгорания (не показан). БКП 3000 может содержать привод смещения 3005, соединенный со штоком смещения 3007. Привод смещения 3005 и шток смещения 3007 могут обеспечивать регулировку в состоянии смещения и затем в рабочем состоянии БКП 3000. В некоторых вариантах осуществления привод смещения 3005 может сообщаться с системой управления на основании смещения (не показана).
[0137] В одном варианте осуществления БКП 3000 имеет главный вал 3008, практически совпадающий с продольной осью 3010 БКП 3000. Главный вал 3008 может соединяться с входной ведущей деталью 3012 и планетарной ведущей деталью 3014. В одном варианте осуществления главный вал 3008 может предназначаться для соединения с некоторыми компонентами насоса 3015. В одном варианте осуществления насос 3015 представляет собой хорошо известный роторный насос. В одном случае насос 3015 содержит внутреннюю шестерню, приводимую главным валом 3008. Кроме того, насос 3015 может содержать корпус, конструктивно исполненный таким образом, что является практически неповоротным вокруг продольной оси 3010. Насос 3015 может конструктивно исполняться таким образом, чтобы подавать смазку в БКП. В некоторых вариантах осуществления насос 3015 может конструктивно исполняться таким образом, чтобы подавать жидкость для гидравлической системы под давлением, например, в систему управления на воздушном судне. Планетарная ведущая деталь 3014 может соединяться узлом планетарной передачи 3016. В одном варианте осуществления узел планетарной передачи 3016 может представлять собой двух шестеренчатый планетарный комплект, имеющий солнечную шестерню, несколько планетарных шестерен, водило и коронную шестерню. В некоторых вариантах осуществления планетарная ведущая деталь 3014 может соединяться с водилом узла планетарной передачи 3016.
[0138] Обращаясь по-прежнему к фиг.30-33, в одном варианте осуществления БКП 3000 имеет первое кольцо 3018, действующее за счет сцепления, соединенное с входной ведущей деталью 3012. Первое кольцо 3018, действующее за счет сцепления, находится в контакте с узлом вариатора 3020. БКП 3000 может иметь второе кольцо 3022, действующее за счет сцепления, в контакте с узлом вариатора 3020. Второе кольцо 3022, действующее за счет сцепления, может соединяться с узлом генератора аксиальной силы 3024. В одном варианте осуществления узел генератора аксиальной силы 3024 содержит несколько роликов, предназначенных для взаимодействия с несколькими наклонными плоскостями для создания аксиальной силы при работе БКП 3000. Узел генератора аксиальной силы 3024 может соединяться с ведущей деталью солнца планетарной передачи 3026. Ведущая деталь солнца планетарной передачи 3026 может соединяться с солнечной шестерней узла планетарной передачи 3016. В одном варианте осуществления узел планетарной передачи 3016 может соединяться с выходным валом 3028. В некоторых вариантах осуществления выходной вал 3028 соединяется с коронной шестерней узла планетарной передачи 3016.
[0139] При работе БКП 3000 входная мощность может подаваться в БКП 3000 посредством муфты на главный вал 3008. Главный вал 3008 может передавать мощность на входную ведущая деталь 3012 и планетарную ведущую деталь 3014. Входная ведущая деталь 3012 может конструктивно исполняться таким образом, чтобы передавать мощность на первое кольцо 3018, действующее за счет сцепления, и тем самым доставлять мощность на узел вариатора 3020. Узел вариатора 3020 передает мощность на второе кольцо 3022, действующее за счет сцепления. Второе кольцо 3022, действующее за счет сцепления, передает мощность на ведущую деталь солнца планетарной передачи 3026. В одном варианте осуществления мощность, подаваемая на узел планетарной передачи 3016 через планетарную ведущую деталь 3014 и ведущую деталь солнца планетарной передачи 3026, передается из БКП 3000 через выходной вал 3028.
[0140] Обратимся теперь к фиг.34 и 35, в одном варианте осуществления узел вариатора 3020 содержит несколько узлов сателлитов с передачей мощности за счет сцепления 3030, расположенных на определенном угловом расстоянии между собой, соосно продольной оси 3010. Каждый узел сателлита с передачей мощности за счет сцепления 3030 предназначен для контактирования с солнцем с передачей мощности за счет сцепления 3032 в месте, находящемся радиально внутри. Солнце с передачей мощности за счет сцепления 3032 функционально соединено с несколькими кулачками переключения 3034. В одном варианте осуществления при работе БКП 3000 солнце с передачей мощности за счет сцепления 3032 и кулачки переключения 3034 могут перемещаться в аксиальном направлении вдоль продольной оси 3010. Кулачки переключения 3034 могут конструктивно исполняться таким образом, чтобы соединяться с каждым из узлов сателлитов с передачей мощности за счет сцепления 3030. В одном варианте осуществления узел вариатора 3020 имеет первое водило 3036 и второе водило 3038. Первое и второе водила 3036 и 3038 конструктивно исполнены таким образом, что поддерживают каждый из узлов сателлитов с передачей мощности за счет сцепления 3030. В одном варианте осуществления второе водило 3038 может поворачиваться относительно первого водила 3036. Первое и второе водила 3036 и 3038 могут соединяться со штоком смещения 3007. Первое и второе водила 3036 и 3038 могут соединяться с крышкой 3040 первого водила и крышкой 3042 второго водила соответственно. Крышки 3040 и 3042 первого и второго водил крепятся к каждому из узлов сателлитов с передачей мощности за счет сцепления 3030. Крышки 3040 и 3042 первого и второго водил могут крепиться к первому и второму водилам 3036 и 3038 хомутами 3044.
[0141] Обратимся теперь конкретно к фиг.35, в одном варианте осуществления узел вариатора 3020 имеет несколько вставок водил 3046. Вставки водил 3046 могут крепиться к первому и второму водилам 3036 и 3038. После сборки вставки водил 3046 могут контактировать с определенными компонентами узлов сателлитов с передачей мощности за счет сцепления 3030. В одном варианте осуществления вставки водил 3046 изготовлены из стали, а первое и второе водила 3036, 3038 изготовлены из алюминия. В некоторых вариантах осуществления вставки водил 3046 выполнены как одно целое с первым и вторым водилами 3036, 3038.
[0142] Обратимся теперь к фиг.36 и 37, в одном варианте осуществления узел сателлита с передачей мощности за счет сцепления 3030 содержит практически сферический сателлит с передачей мощности за счет сцепления 3048, имеющий центральное отверстие, предназначено для приема оси 3050 сателлита. Сателлит с передачей мощности за счет сцепления 3048 может соединяться с осью 3050 сателлита подшипниками 3052. Узел сателлита с передачей мощности за счет сцепления 3030 может содержать первую опору 3054, соединенную с первым концом ось 3050 сателлита. Узел сателлита с передачей мощности за счет сцепления 3030 может содержать вторую опору 3056, соединенную с осью 3050 сателлита, причем второй конец оси сателлита находится в дальнем месте от первого конца. Первая и вторая опоры 3054 и 3056 каждая может принимать ролик реакции 3058. В одном варианте осуществления ролик реакции 3058 входит в паз 3060, выполненный в каждой опоре 3054, 3056. В одном варианте осуществления первая опора 3054 может крепиться к оси 3050 сателлита тугой посадкой или иным подходящим способом жесткого соединения. Ролик 3058А может вращаться вокруг оси 3050 сателлита. В некоторых вариантах осуществления вторая опора 3056 может вращаться вокруг оси 3050 сателлита. Ролик 3058 В может крепиться к оси 3050 сателлита тугой посадкой или иными подходящими способами жесткого соединения, чтобы не допускать осевого перемещения второй опоры 3056 на оси 3050 сателлита. Ролики 3058 конструктивно исполнены таким образом, чтобы соединяться с водилами 3036 и 3038. В одном варианте осуществления каждая из первой и второй опор 3054 и 3056 может иметь ролик реакции переключения 3062. Ролик реакции переключения 3062 может входить в паз 3064, выполненный в каждой из первой и второй опор 3054, 3056. В одном варианте осуществления паз 3064 практически перпендикулярен пазу 3060. В ролик реакции переключения 3062 может входить ось 3066 ролика переключения. Ось 3066 ролика переключения может входить в отверстие 3068. При работе БКП 3000 ролики реакции переключения 3062 соединяются с кулачками переключения 3034.
[0143] Обращаясь по-прежнему к фиг.36 и 37, в одном варианте осуществления первая и вторая опоры 3054 и 3056 имеют отверстие 3070, в которое входит ось 3050 сателлита. Отверстие 3070 может быть практически перпендикулярным пазу 3060. Первая и вторая опоры 3054 и 3056 могут иметь выступ 3072. Выступ 3072 может быть практически соосным с 3070 и выходить из него. В одном варианте осуществления выступ 3072 взаимодействует с подшипниками 3052. Первая и вторая опоры 3054 и 3056 могут иметь поверхность реакции 3074. Поверхность реакции 3074 может иметь криволинейный профиль, если смотреть в плоскости фиг.37. Поверхности реакции 3074 могут быть в скользящем зацеплении с крышками 3040, 3042 водил.
[0144] Перейдем теперь к фиг.38, в одном варианте осуществления вставка 3046 водила может иметь практически u-образное тело 3076. Вставка 3046 водила может иметь поверхность реакции 3078, образованную на внутренней стороне u-образного тела 3076. Поверхность реакции 3078 конструктивно исполнена таким образом, чтобы при работе БКП 3000 контактировать с роликом 3058. Вставка 3046 водила может иметь наружную поверхность 3080. Наружная поверхность 3080 крепится к первому или второму водилу 3036 или 3038.
[0145] Обратимся теперь к фиг.39 и 40, в одном варианте осуществления второе водило 3038 может представлять собой практически чашеобразное тело 3082, имеющее центральное отверстие 3084. Чашеобразное тело 3082 может иметь несколько Радиальных пазов 3086, расположенных на определенном угловом расстоянии между собой вокруг центрального отверстия 3084. Каждый из радиальных пазов 3086 может иметь поверхности реакции смещения 3088, контактирующие с роликами 3058. Второе водило 3038 может иметь выступ 3090, проходящий в осевом направлении из центрального отверстия 3084. Выступ 3090 может иметь канавку 3092, предназначенную под хомут 3044. Чашеобразное тело 3082 может иметь практически плоскую торцевую поверхность 3094, выполненную по его наружной периферии. Торцевая поверхность 3094 может конструктивно исполняться таким образом, чтобы обеспечить сопряжение со скольжением между первым и вторым водилами 3036 и 3038. Второе водило 3038 может иметь ушко 3094, выступающее радиально с наружной периферии чашеобразного тела 3082. Ушко 3094 может иметь удлиненное отверстие 3095. Удлиненное отверстие 3095 может предназначаться для взаимодействия со штоком смещения 3007, чтобы обеспечивать поворот второго водила 3038 относительно первого водила 3036 и тем самым регулировать передаточное число по частоте вращения при работе БКП 3000. В одном варианте осуществления первый корпусный элемент 3002 имеет полость 3096 (фиг.30 и 31) по обе стороны от ушка 3094, предназначенную для обеспечения соединения первого и второго водил 3036 и 3038 со штоком смещения 3007. В некоторых вариантах осуществления первое водило 3036 практически аналогично второму водилу 3038. Первое водило 3036 может иметь отверстие 3098 (фиг.34). После сборки БКП 3000 отверстие 3098 может располагаться практически напротив удлиненного отверстия 3095 и может взаимодействовать со штоком смещения 3007.
[0146] Обратимся теперь к фиг.41 и 42, в одном варианте осуществления шток смещения 3007 может быть цилиндрическим стержнем 3100, имеющим первый конец 3102 и второй конец 3104. Первый конец 3102 может конструктивно исполняться таким образом, чтобы обеспечивать соединение штока смещения 3007 с приводом смещения 3005 (фиг.30). В некоторых вариантах осуществления первый конец 3102 имеет несколько витков резьбы для соединения с приводом смещения 3005. В других вариантах осуществления первый конец 3102 имеет шлиц для соединения с приводом смещения 3005. Второй конец 3104 может соединяться с первым водилом 3036. В некоторых вариантах осуществления второй конец 3104 может поворачиваться в отверстии 3098 первого водила 3036. Шток смещения 3007 может иметь эксцентриковый кулачок смещения 3106, выполненный вблизи второго конца 3104. Эксцентриковый кулачок смещения 3106 может располагаться так, что его центр 3108 радиально смещен от центра 3110 цилиндрического стержня 3100. Эксцентриковый кулачок смещения 3106 может входить в удлиненное отверстие 3095 второго водила 3038 (фиг.39). Эксцентриковый кулачок смещения 3106 конструктивно исполнен для зацепления со скольжением с удлиненным отверстием 3095.
[0147] При работе БКП 3000 шток смещения 3007 может поворачиваться приводом смещения 3007. Поворот штока смещения 3007 вызывает поворот второго водила 3038 относительно первого водила 3036. Поворот второго водила 3038 относительно первого водила 3036 вызывает состояние смещения на каждом из узлов сателлитов с передачей мощности за счет сцепления 3030. Состояние смещения вызывает наклон осей 3050 сателлитов узлов сателлитов с передачей мощности за счет сцепления 3030. Наклон осей сателлитов 3050 корректирует передаточное число по частоте вращения БКП 3000.
[0148] Перейдем теперь к фиг.43, в одном варианте осуществления БКП 4000 может содержать несколько сателлитов с передачей мощности за счет сцепления 4002, расположенных на определенном угловом расстоянии между собой вокруг продольной оси. БКП 4000 может иметь солнце с передачей мощности за счет сцепления 4003, контактирующим с каждым сателлитом с передачей мощности за счет сцепления 4002 в месте радиально внутри. Каждый из сателлитов с передачей мощности за счет сцепления 4002 может иметь наклоняемую ось вращения 4004, опирающуюся на первый и второй водила 4006 и 4008 соответственно. В некоторых вариантах осуществления первое и второе водила 4006 и 4008 предназначены для обеспечения состояния смещения на каждом из сателлитов с передачей мощности за счет сцепления 4002. В одном варианте осуществления первое водило 4006 практически неповоротно вокруг продольной оси БКП 4000. БКП 4000 может содержать первое и второе кольца 4010, 4012, действующие за счет сцепления, в контакте с каждым из сателлитов с передачей мощности за счет сцепления 4002. Первое и второе кольцо 4010, 4012, действующие за счет сцепления, могут соединяться с первым и вторым генераторами аксиальной силы 4014, 4016 соответственно. Первый генератор аксиальной силы 4014 может соединяться с входной ведущей деталью 4018. Второй генератор аксиальной силы 4016 может соединяться с выходным валом 4020. В одном варианте осуществления входная ведущая деталь 4018 соединена с муфтой 4022. Муфта 4022 может предназначаться для приема входной мощности, например, от электрического двигателя или иного подходящего первичного движителя.
[0149] При работе БКП 4000 входная мощность может передаваться с муфты 4022 на входную ведущую деталь 4018. Входная ведущая деталь 4018 передает мощность на первое кольцо 4010, действующее за счет сцепления, посредством первого генератора аксиальной силы 4014. Первое кольцо 4010, действующее за счет сцепления, передает мощность каждому из сателлитов с передачей мощности за счет сцепления 4002. Сателлиты с передачей мощности за счет сцепления 4002 передают мощность на второе кольцо 4012, действующее за счет сцепления. Со второго кольца 4012, действующего за счет сцепления, мощность передается на выходной вал 4020 посредством второго генератора аксиальной силы 4016. В некоторых вариантах осуществления мощность с выходного вала 4020 подается на нагрузку 4024.
[0150] Обратимся теперь к фиг.44, в одном варианте осуществления БКП 4100 может содержать несколько сателлитов с передачей мощности за счет сцепления 4102, расположенных на определенном угловом расстоянии между собой вокруг продольной оси. БКП 4100 может иметь солнце с передачей мощности за счет сцепления 4103, контактирующее с каждым сателлитом с передачей мощности за счет сцепления 4102 в месте радиально внутри. Каждый из сателлитов с передачей мощности за счет сцепления 4102 может иметь наклоняемую ось вращения 4104. Сателлиты с передачей мощности за счет сцепления 4102 могут предназначаться для соединения с первым и вторым водилами 4106 и 4108 соответственно. В одном варианте осуществления первое и второе водила 4106 и 4108 конструктивно исполнены для обеспечения состояния смещения на каждом из сателлитов с передачей мощности за счет сцепления 4102. В одном варианте осуществления первое и второе водила 4106 и 4108 могут поворачиваться вокруг продольной оси БКП 4100. БКП 4100 может содержать первое и второе кольца 4110 и 4112 соответственно, действующие за счет сцепления. Первое и второе кольца 4110 и 4112, действующие за счет сцепления, могут соединяться с первым и вторым генераторами 4114 и 4116 соответственно. В одном варианте осуществления первый генератор аксиальной силы 4114 конструктивно исполнен практически неповоротным вокруг продольной оси БКП 4100. Второй генератор аксиальной силы 4116 может соединяться с выходным валом 4118.
[0151] При работе БКП 4100 первое водило 4106 может получать мощность со входного вала 4120. Первое водило 4106 передает мощность каждому из сателлитов с передачей мощности за счет сцепления 4102. Сателлиты с передачей мощности за счет сцепления 4102 движутся по орбите вокруг солнца с передачей мощности за счет сцепления 4103 и передают мощность на второе кольцо 4112, действующее за счет сцепления. Со второго кольца 4112, действующего за счет сцепления, мощность передается на выходной вал посредством второго генераторы аксиальной силы 4116. Выходной вал 4118 подает мощность на нагрузку 4122.
[0152] Перейдем теперь к фиг.45-48, в одном варианте осуществления вариатор 4200 может содержать узел солнца с передачей мощности за счет сцепления 4202, соединенное с несколькими узлами сателлитов с передачей мощности за счет сцепления 4204. Вариатор 4200 может предназначаться для использования, например, в БКП 12, БКП 1000 или БКП 3000. Каждый из узлов сателлитов с передачей мощности за счет сцепления 4204 функционально соединен с первым водилом 4206 и вторым водилом 4208. В некоторых вариантах осуществления к первому и второму водилам 4206 и 4208 может крепиться удерживающее кольцо 4210 водила. Узел солнца с передачей мощности за счет сцепления 4204 может содержать солнце с передачей мощности за счет сцепления 4212. Солнце с передачей мощности за счет сцепления 4212 может иметь центральное отверстие 4214 под подшипники 4216. Центральное отверстие 4214 может иметь буртик 4218 и канавку 4220 под с-образный хомут для обеспечения установки подшипников 4216 в центральное отверстие 4214. Солнце с передачей мощности за счет сцепления 4212 может иметь несколько каналов смазки 4222, проходящих радиально наружу из центрального отверстия 4214. В одном варианте осуществления наружная периферия солнца с передачей мощности за счет сцепления 4214 имеет первую и вторую контактные поверхности 4224А и 4224 В, проходящие из углубления 4226. Первая и вторая контактные поверхности 4224А и 4224 В могут контактировать с каждым из узлов сателлитов с передачей мощности за счет сцепления 4204. Первая и вторая контактные поверхности 4224А и 4224 В могут проходить из углубления 4226 под углом 4228, если смотреть в плоскости фиг.48. В одном варианте осуществления угол 4228 находится в пределах примерно 2-45 градусов. В одном предпочтительном варианте осуществления угол 4228 равен примерно 5-10 градусов. При работе вариатора 4200, когда узлы сателлитов с передачей мощности за счет сцепления 4204 наклоняются, узел солнца с передачей мощности за счет сцепления 4202 остается аксиально соединенным с узлами сателлитов с передачей мощности за счет сцепления 4204. В некоторых вариантах осуществления подшипники 4216 могут быть убраны, так что узел солнца 4202 уже не соединен с центральным отверстием 4214, но остается радиально соединенным с БКП 1000, например, путем контактирования узлов сателлитов с передачей мощности за счет сцепления 4204 посредством контактных поверхностей 4224.
[0153] Обратимся теперь к фиг.49-51, в одном варианте осуществления шестерня 5000 может соединяться с первым водилом 5002 и со вторым водилом 5004. Шестерня 5000 может обеспечивать поворот вокруг продольной оси между первым и вторым водилами 5002, 5004. Шестерня 5000 может иметь вал 5006. Вал 5006 может проходить радиально наружу от первого и второго водил 5002, 5004. Вал 5006 может соединяться с приводом смещения (не показан). В некоторых вариантах осуществления шестерня 5000 может быть конической шестерней, а первое и второе водила 5002, 5004 могут выполняться соответствующими конической шестерне. При работе привод смещения может передавать вращение валу 5006 и тем самым поворачивать шестерню 5000. Поворот шестерни 5000 вызывает поворот первого водила 5002 в первом направлении поворота и вызывает поворот второго водила 5004 во втором направлении поворота, практически противоположном первому направлению поворота.
[0154] Обратимся теперь конкретно к фиг.50 и 51, в одном варианте осуществления шток смещения 5010 может соединяться с первым водилом 5012 и со вторым водилом 5014. Первое и второе водила 5012, 5014 могут быть практически подобными первому и второму водилам 5002, 5004. Первое водило 5012 может иметь резьбу для зацепления со штоком смещения 5010 в первом резьбовом сопряжении 5016. Второе водило 5014 может иметь резьбу для зацепления со штоком смещения 5010 во втором резьбовом сопряжении 5018. Первое резьбовое сопряжение 5018 - это обычно правая резьба, а второе резьбовое сопряжение 5018 - это левая резьба. В одном варианте осуществления шток смещения 5010 может соединяться с приводом смещения (не показан). В некоторых вариантах осуществления шток смещения 5010 расположен тангенциально по отношению к первому и второму водилам 5012, 5014. При работе шток смещения 5010 может поворачиваться и тем самым вызывать относительный поворот между первым и вторым водилами 5012, 5014. Резьбовые сопряжения 5016 и 5018 могут конструктивно исполняться таким образом, чтобы обеспечивать небольшое радиальное смещение для обеспечения поворота первого и второго водил 5012, 5014 относительно друг друга.
[0155] Обратимся теперь конкретно к фиг.52 в одном варианте осуществления шестерня 5020 может соединяться с первым водилом 5022 и со вторым водилом 5024. Для доходчивости, шестерня 5020 показана на фиг.52 без хорошо известных зубьев. Шестерня 5020 может обеспечивать относительный поворот первого и второго водил 5022, 5024 вокруг продольной оси. Шестерня 5020 может иметь вал 5026. Шестерня 5026 соединяется с приводом смещения (не показан). В одном варианте осуществления вал 5026 проходит аксиально от шестерни 5020. Первое водило 5022 может иметь удлинение для зацепления 5028, предназначенное для зацепления с шестерней 5020. При Работе привод смещения может передавать поворот валу 5026, чтобы тем самым поворачивать шестерню 5020. Поворот шестерни 5020 вызывает поворот первого водила 5022 в первом направлении поворота и вызывает поворот второго водила 5024 во втором направлении поворота, практически противоположном первому направлению поворота.
[0156] Следует отметить, что в вышеприведенном описании даны размеры некоторых компонентов или узлов. Упомянутые размеры или диапазоны размеров даны, чтобы в максимально возможной мере обеспечить выполнение некоторых юридических требований, таких как требования к лучшему варианту осуществления. Однако объем изобретений, раскрытых в настоящем описании, должен определяться исключительно формулой изобретения, и, следовательно, ни один из упомянутых размеров не должен рассматриваться ограничивающим объем изобретения конкретными вариантами осуществления за исключением конкретных размеров или диапазонов размеров, оговоренных в пунктах формулы изобретения.
[0157] В вышеприведенном описании подробно описаны некоторые варианты осуществления. Следует, однако, понимать, что как бы подробно они ни были описаны в тексте, изобретение может осуществляться многими путями. И как уже говорилось, следует отметить, что использование конкретной терминологии при описании некоторых признаков или аспектов изобретения не должно рассматриваться как подразумевающее, что этой терминологии в настоящем описании даются новые определения, чтобы она была ограничена включением любых конкретных характеристик признаков или аспектов изобретения, с которыми эта терминология связана.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2499932C2 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ДЛЯ БЕССТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2011 |
|
RU2584635C2 |
| СИСТЕМА ПЕРЕДАЧИ С РАЗДЕЛЕНИЕМ ПОТОКА МОЩНОСТИ С ЧЕТЫРЬМЯ ОТВОДАМИ | 2004 |
|
RU2334142C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2008 |
|
RU2487284C2 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1997 |
|
RU2166681C2 |
| АВТОМОБИЛЬНЫЙ ВАРИАТОР | 1997 |
|
RU2127382C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2006 |
|
RU2332599C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2008 |
|
RU2482354C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ, МЕХАНИЗМ РЕВЕРСИРОВАНИЯ, МОДУЛЬ ВАРЬИРОВАНИЯ И УПРАВЛЯЕМЫЙ ОГРАНИЧИТЕЛЬ ДИАПАЗОНА ПЕРЕДАТОЧНЫХ ЧИСЕЛ | 2006 |
|
RU2300032C1 |
| ПРОГРЕССИВНЫЕ ТРАНСМИССИИ, БЕССТУПЕНЧАТЫЕ ТРАНСМИССИИ, СПОСОБЫ, УЗЛЫ, ПОДУЗЛЫ И ИХ КОМПОНЕНТЫ | 2013 |
|
RU2618553C2 |









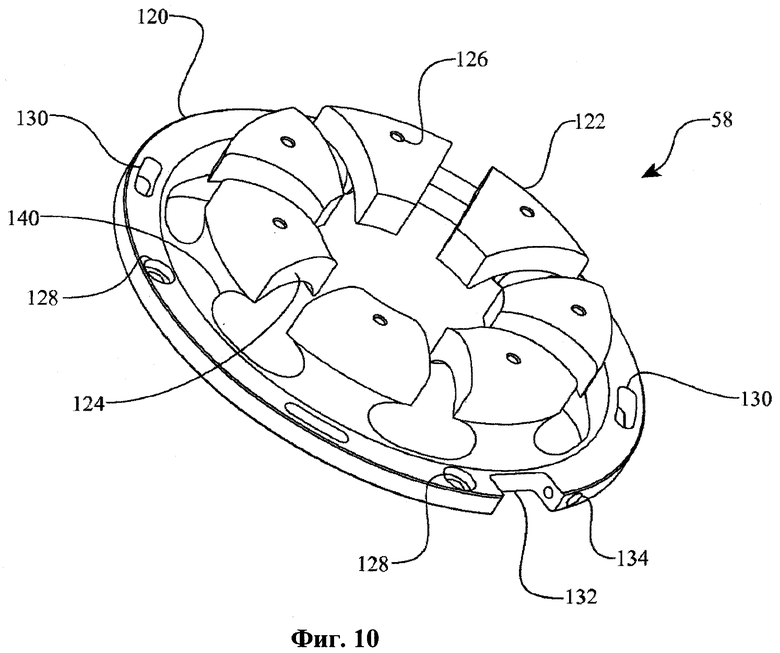
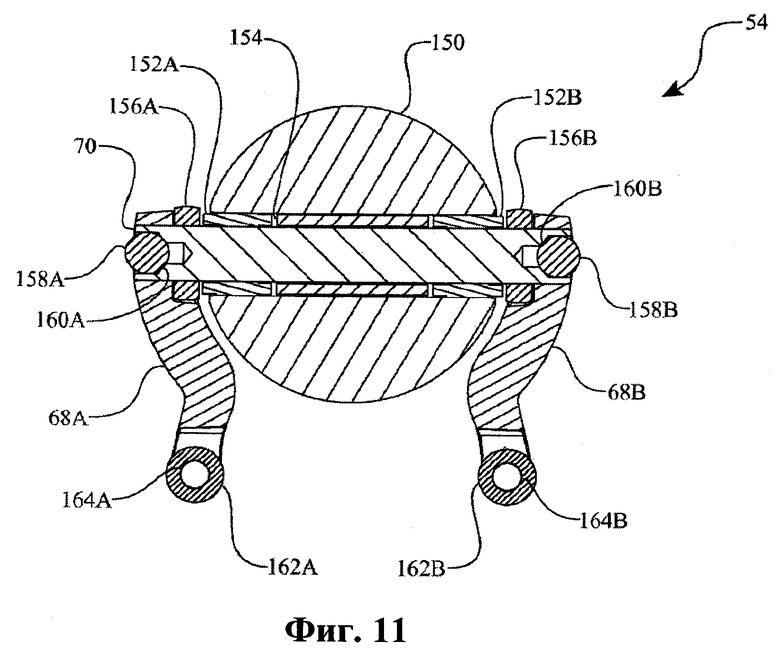
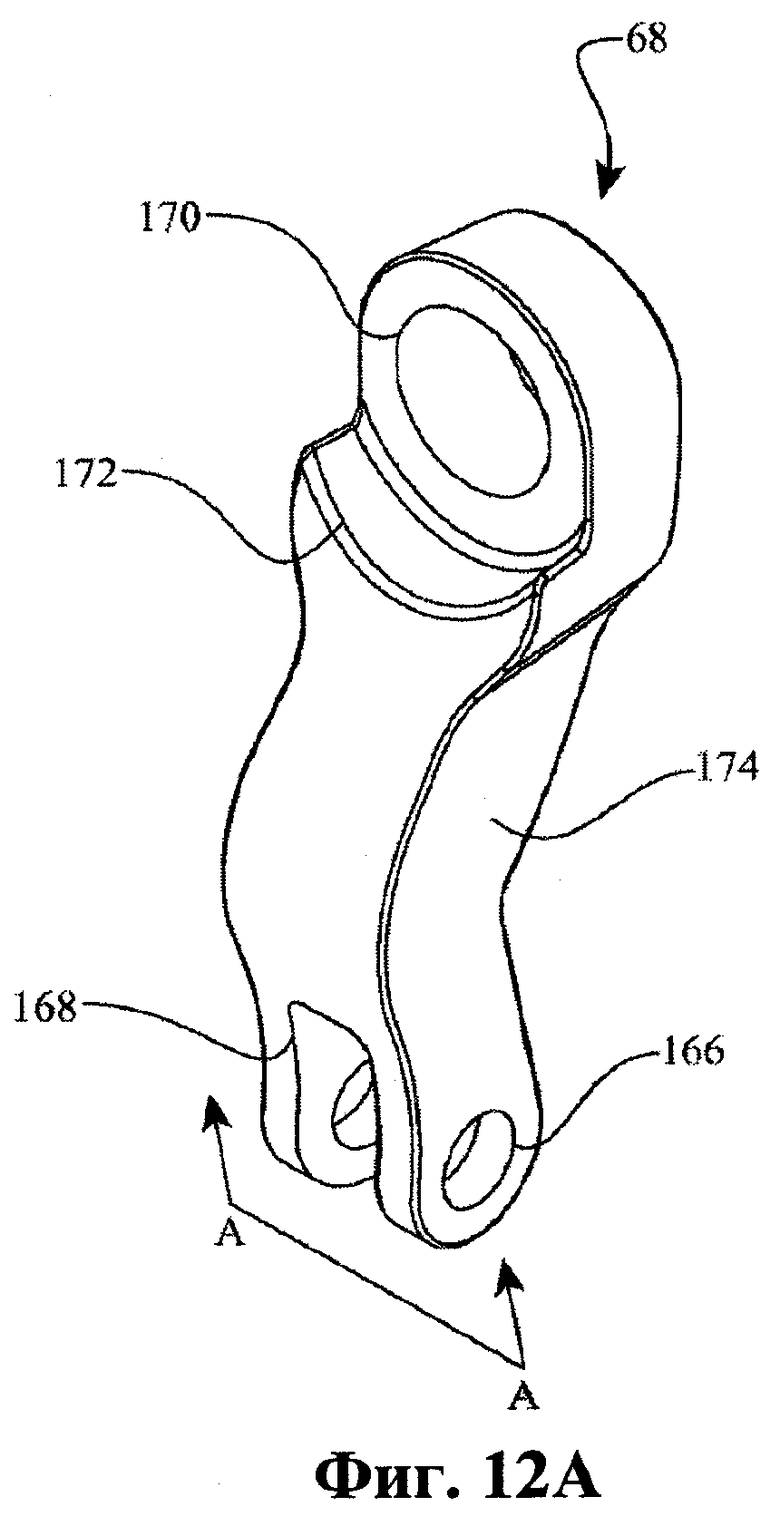
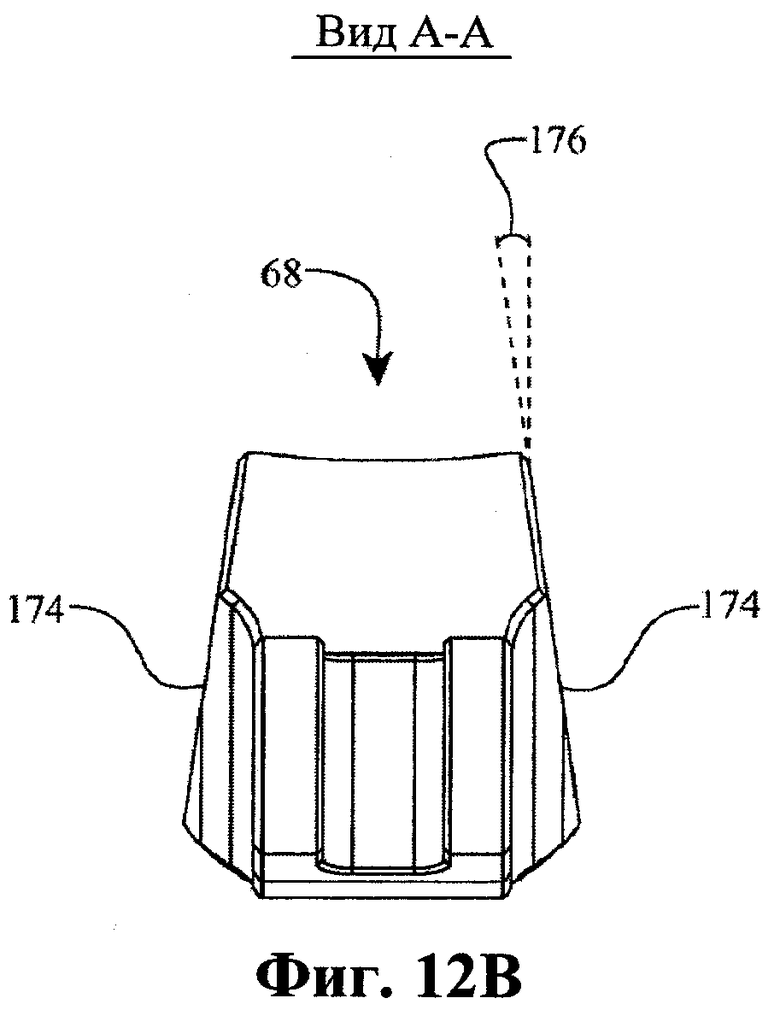

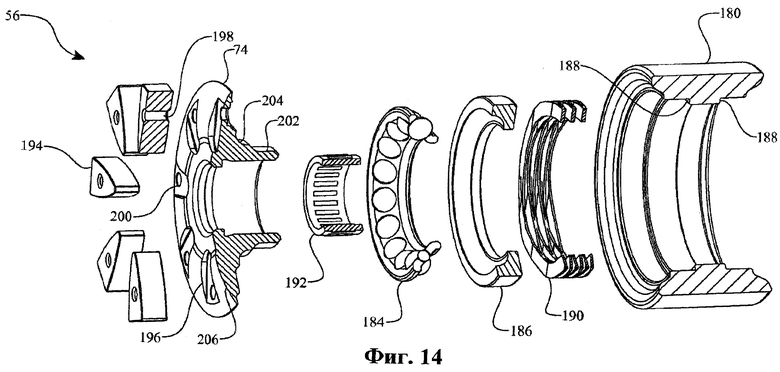










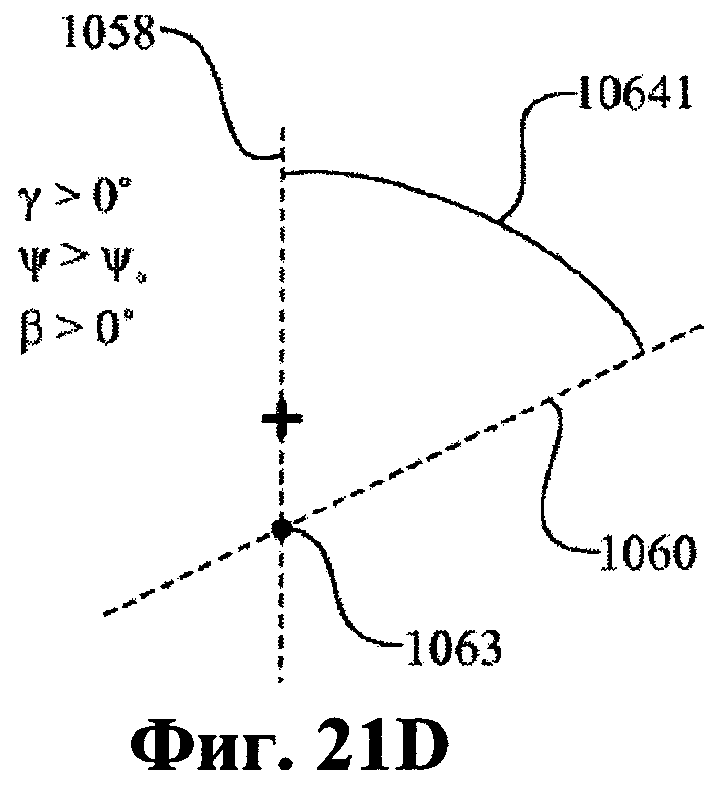
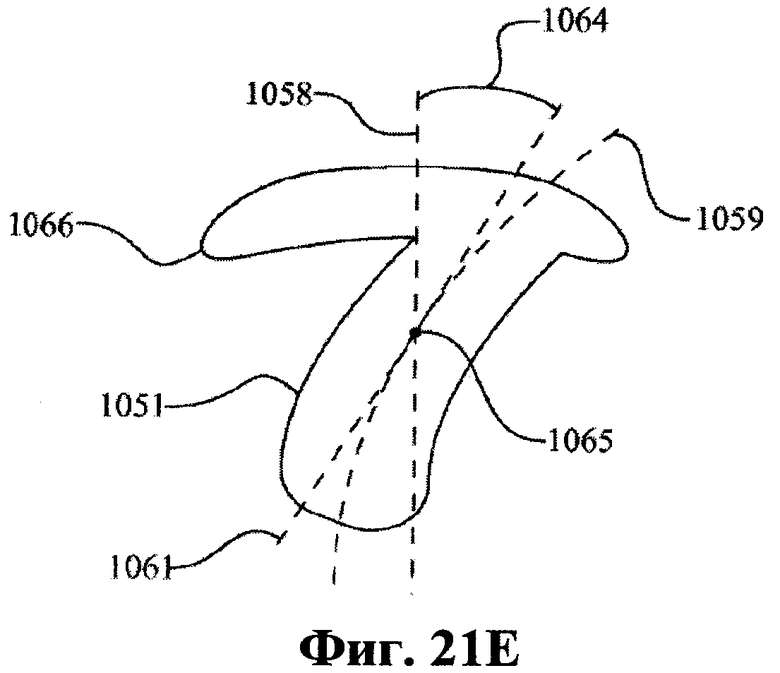
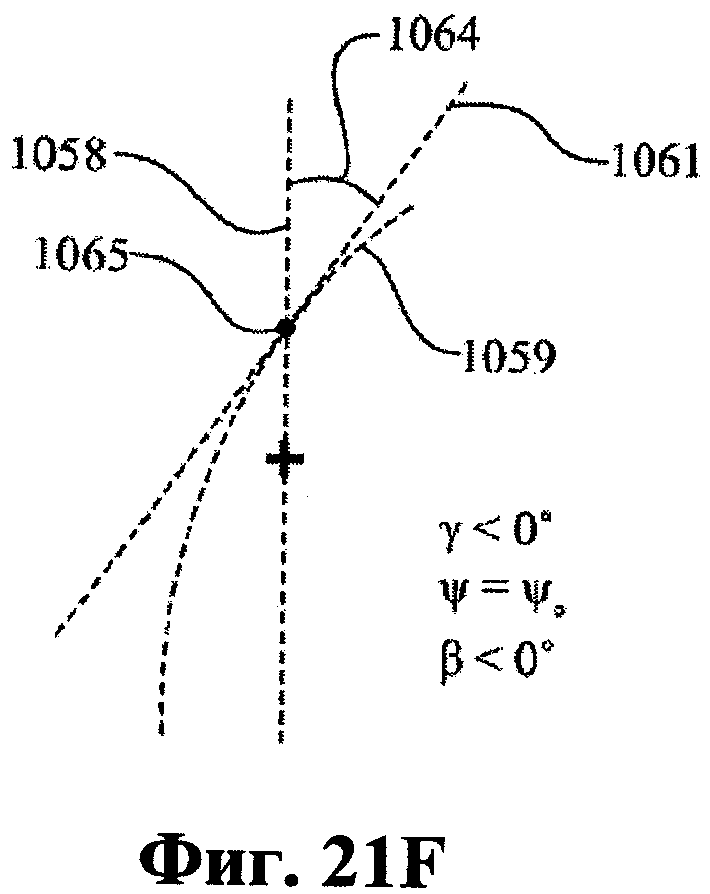



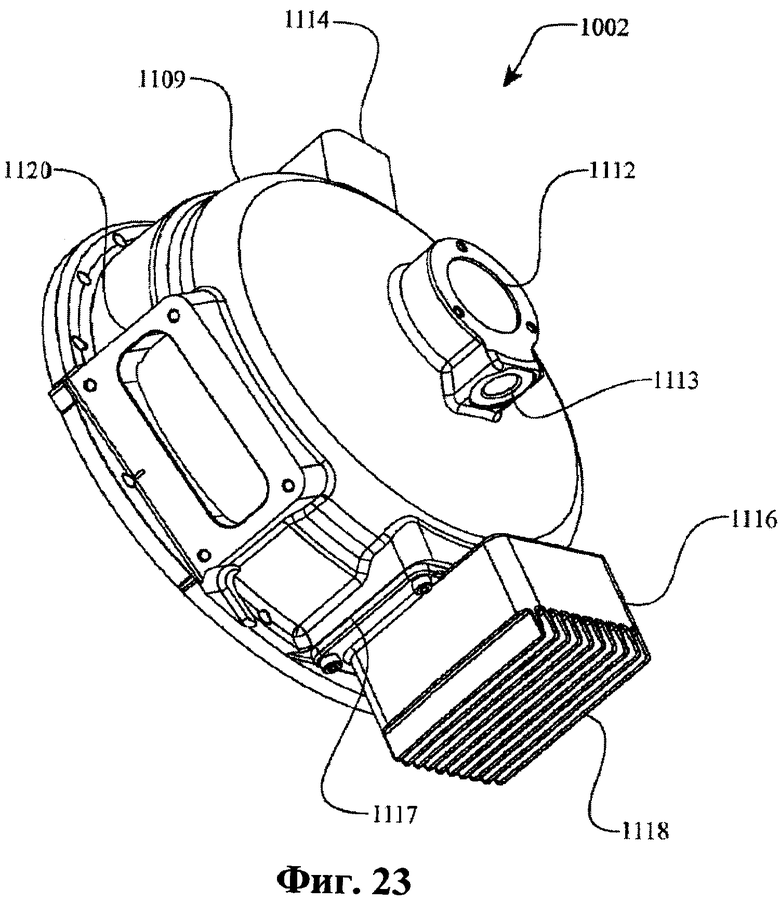


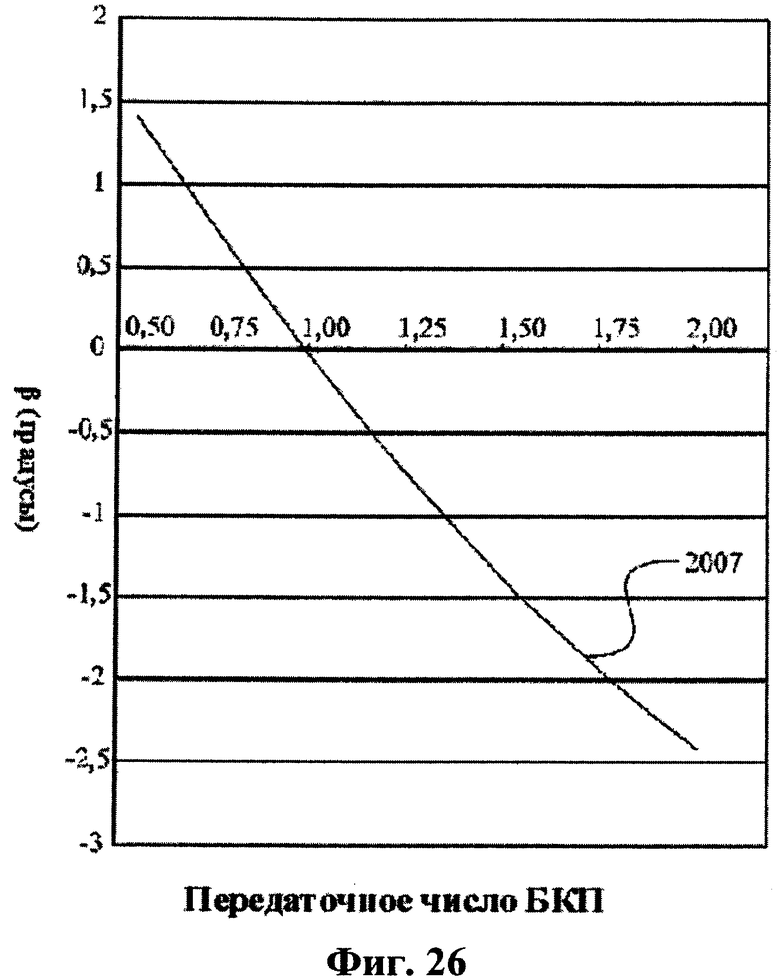

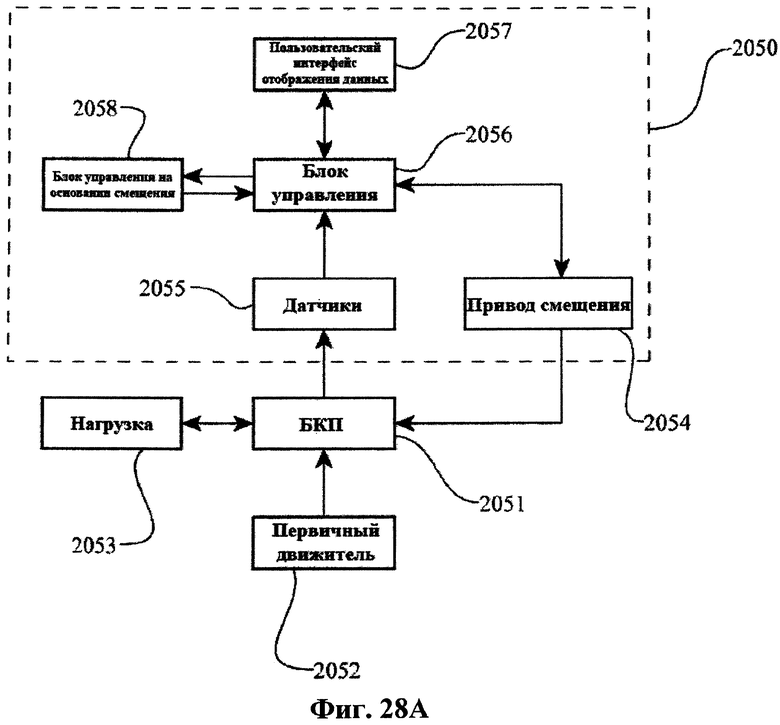

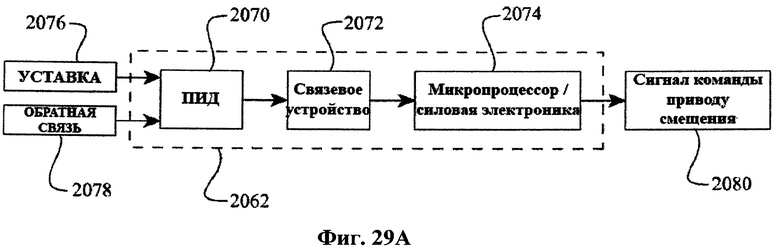



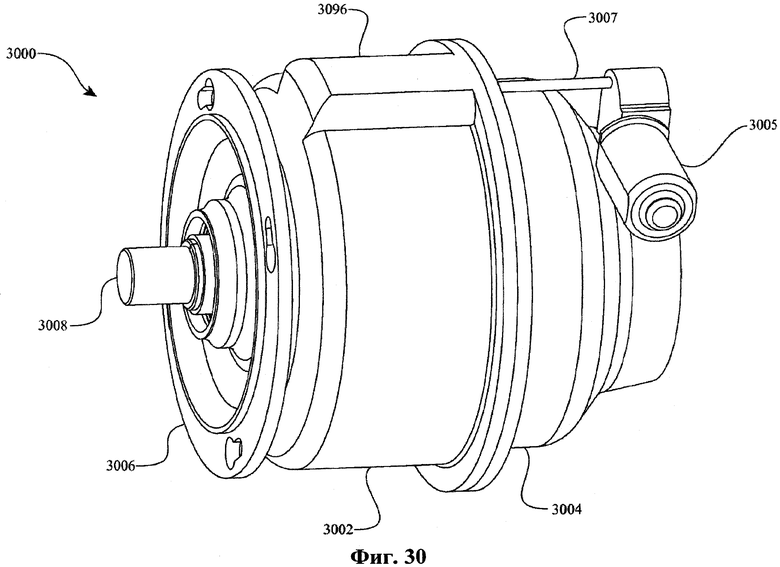

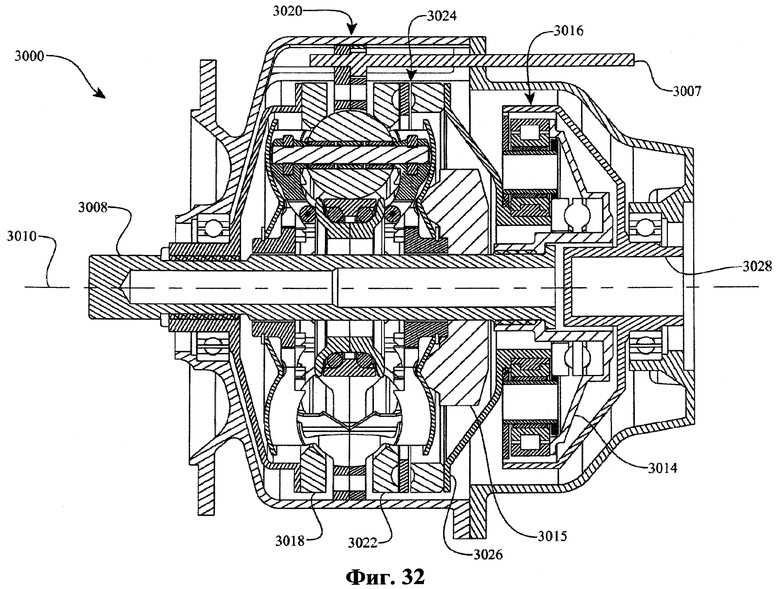
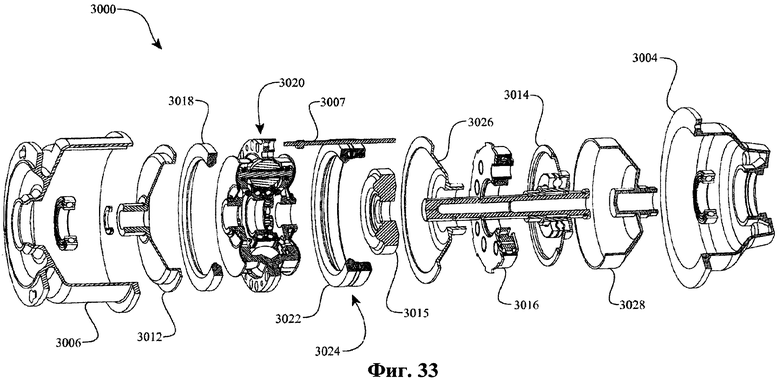




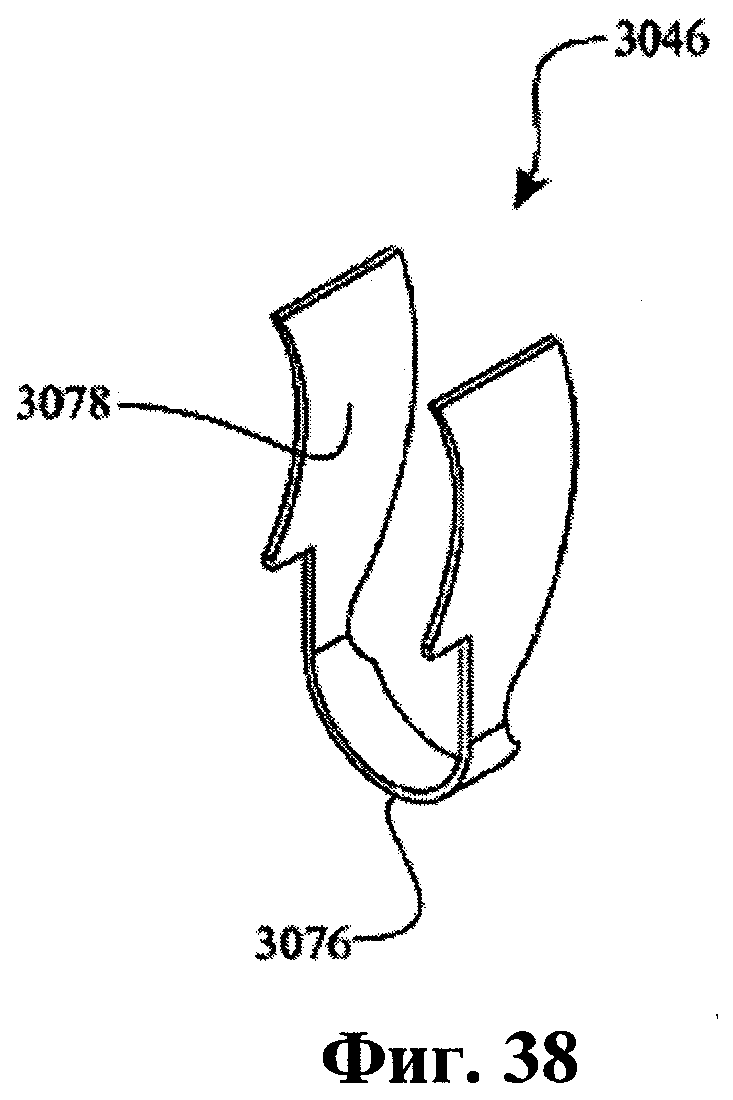
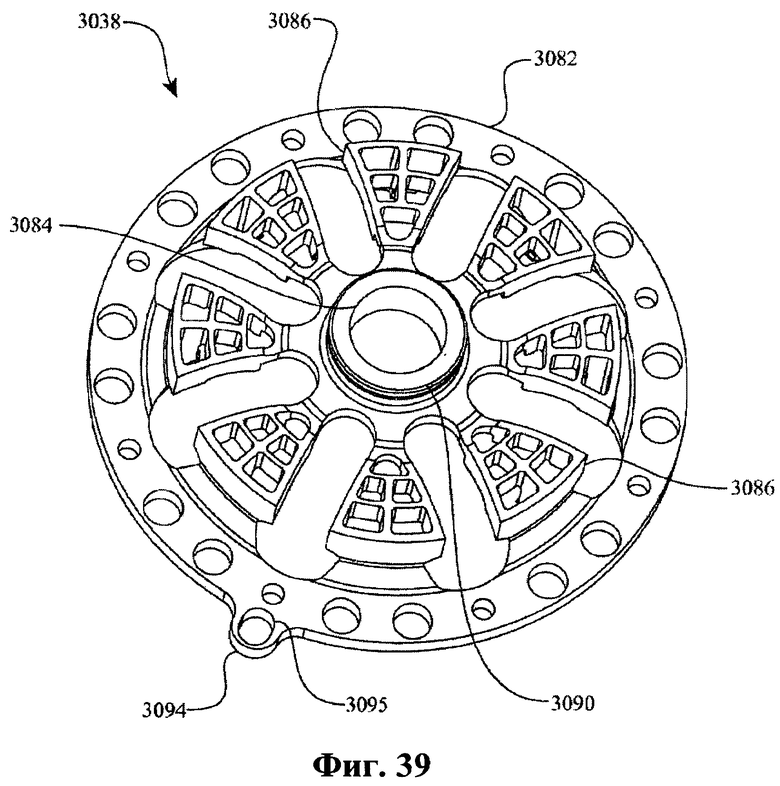


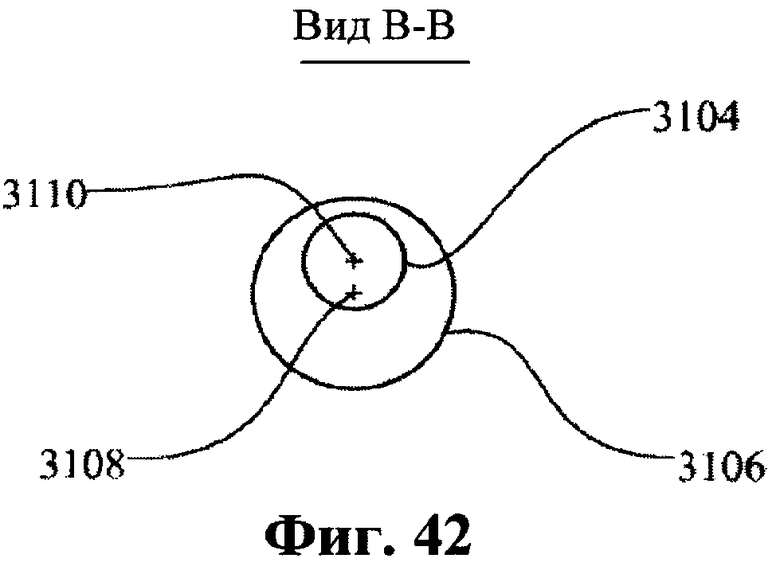



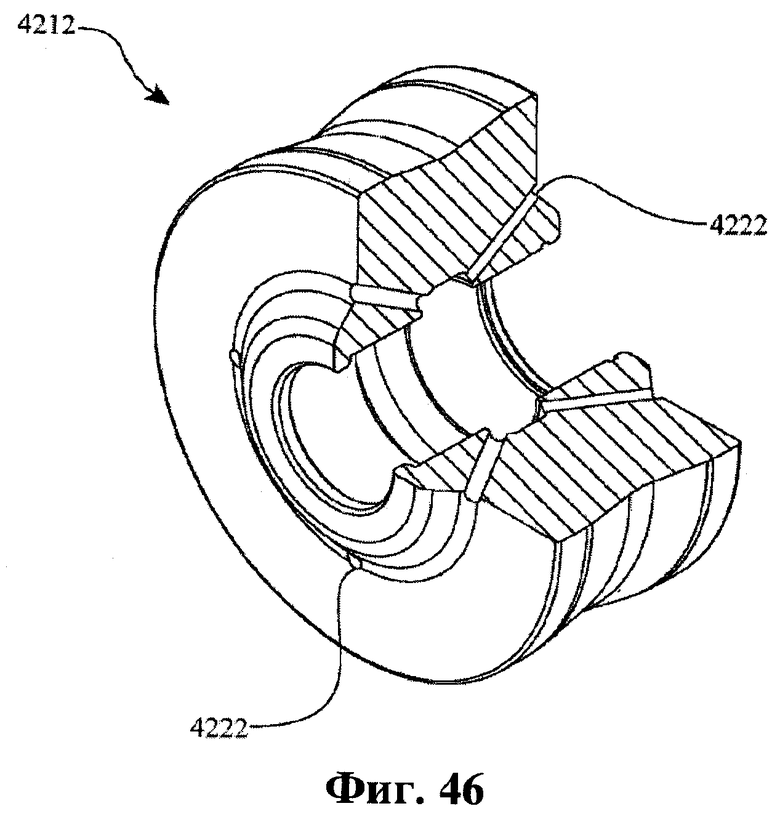






Изобретение относится к бесступенчатым планетарным устройствам для модулирования потока мощности в силовой передаче или приводе. Бесступенчатая коробка передач (1000) содержит первое (1028) водило и второе (1030) водило, которые аксиально соединены посредством удерживающего кольца (1036) водила и совершают вращение относительно друг друга. Передаточное число изменяется посредством наклона осей сателлитов (сфер), что вызвано относительным вращением между первым водилом и вторым водилом. 2 н. и 13 з.п. ф-лы, 52 ил.
1. Бесступенчатый привод навесных агрегатов (БПНА), содержащий: бесступенчатую коробку передач (БКП), соединенную с навесным агрегатом,
причем бесступенчатая коробка передач имеет несколько сателлитов с передачей мощности за счет сцепления, причем каждый сателлит с передачей мощности за счет сцепления предназначен для вращения вокруг наклоняемой оси; и
привод смещения, функционально связанный с БКП, причем привод смещения предназначен для того, чтобы придавать состояние смещения БКП для наклона сателлитов с передачей мощности за счет сцепления.
2. БПНА по п.1, где БКП содержит первое водило, соединенное со вторым водилом, причем первое и второе водила функционально соединены с каждым сателлитом с передачей мощности за счет сцепления, при этом первое водило конструктивно исполнено таким образом, чтобы вращаться относительно второго водила вокруг продольной оси БКП.
3. БПНА по п.1, содержащий также выходное устройство, расположенное вдоль продольной оси БКП, причем выходное устройство конструктивно исполнено таким образом, чтобы соединять БПНА с навесным агрегатом.
4. БПНА по п.1, где БКП конструктивно исполнена для получения входной мощности со шкива, приводимого первичным движителем.
5. БПНА по п.2, где первое водило содержит несколько радиально смещенных пазов, выполненных на определенном угловом расстоянии между собой вокруг продольной оси.
6. БПНА по п.4, содержащий также генератор переменного тока, соединенный с выходным устройством.
7. БПНА по п.4, содержащий также насос, соединенный с выходным устройством.
8. Бесступенчатый привод навесных агрегатов (БПНА), содержащий:
несколько сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг продольной оси БПНА, причем сателлиты с передачей мощности за счет сцепления конструктивно исполнены таким образом, чтобы передавать мощность на навесной агрегат;
несколько осей сателлитов, причем каждая ось сателлита функционально соединена с каждым сателлитом с передачей мощности за счет сцепления, причем каждая ось сателлита определяет наклоняемую ось вращения для каждого сателлита с передачей мощности за счет сцепления, причем каждая ось сателлита конструктивно исполнена для углового смещения в плоскости, перпендикулярной продольной оси, причем каждая ось сателлита конструктивно исполнена для углового смещения в плоскости, параллельной продольной оси;
первое водило, функционально связанное с первым концом каждой оси сателлита, причем первое водило установлено вокруг продольной оси; второе водило, функционально связанное со вторым концом каждой оси сателлита, причем второе водило установлено вокруг продольной оси; и где первое и второе водила конструктивно исполнены для поворота относительно друг друга вокруг продольной оси.
9. БПНА по п.8, содержащий также привод смещения, функционально связанный, по меньшей мере, с одним из упомянутых водил.
10. БПНА по п.8, содержащий также шток смещения, соединенный с первым и вторым водилами, причем шток смещения конструктивно исполнен таким образом, чтобы создавать относительный поворот между первым и вторым водилами.
11. БПНА по п.8, содержащий также выходное устройство, расположенное вдоль продольной оси, причем выходное устройство конструктивно исполнено таким образом, чтобы передавать мощность с БПНА на навесной агрегат.
12. БПНА по п.8, содержащий также шкив, конструктивно исполненный таким образом, чтобы передавать входную мощность на каждый из сателлитов с передачей мощности за счет сцепления.
13. БПНА по п.10, где шток смещения содержит эксцентриковый кулачок смещения, предназначенный для соединения, по меньшей мере, с одним из упомянутых водил.
14. БПНА по п.11, где навесной агрегат представляет собой генератор переменного тока.
15. БПНА по п.11, где навесной агрегат представляет собой насос.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 3464281 А, 02.09.1969 | |||
| Подъемно-шторные ворота | 1974 |
|
SU528381A1 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2002 |
|
RU2289045C2 |

