[0001] Данная заявка испрашивает преимущество предварительной заявки на патент США №61/589765, зарегистрированной 23 января 2012 г., которая полностью включается в данную заявку посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область изобретения
[0002] Настоящее изобретение в целом относится к трансмиссиям и, в частности, вариантам осуществления, относящимся к бесступенчатым трансмиссиям (CVT) и прогрессивным трансмиссиям (IVT).
Описание предшествующего уровня техники
[0003] В определенных системах мощность характеризуется крутящим моментом и числом оборотов. Точнее говоря, мощность в этих системах обычно определяется в качестве произведения крутящего момента и числа оборотов. Обычно трансмиссия соединяется с входной мощностью, которая предоставляет входной крутящий момент при входной скорости. Трансмиссия также соединяется с нагрузкой, которая требует выходного крутящего момента и выходной скорости, которые могут отличаться от входного крутящего момента и входной скорости. Обычно и обобщенно первичный двигатель предоставляет входную мощность на трансмиссию, а исполнительное устройство или нагрузка получают выходную мощность от трансмиссии. Основной функцией трансмиссии является модулирование входной мощности таким образом, чтобы доставлять выходную мощность на исполнительное устройство при необходимом отношении входной скорости к выходной скорости («отношении скоростей»).
[0004] Некоторые механические приводы включают трансмиссии типа, известного как ступенчатое, дискретное или постоянное отношение. Эти трансмиссии настраиваются на предоставление отношений скоростей, которые являются дискретными или ступенчатыми в заданном диапазоне отношения скоростей. Например, такая трансмиссия может предусматриваться для отношения скоростей 1:2, 1:1 или 2:1, но такая трансмиссия не может передавать промежуточные отношения скоростей, такие как, например, 1:1,5, 1:1,75, 1,5:1 или 1,75:1. Другие приводы включают тип трансмиссии, который широко известен в качестве бесступенчатой трансмиссии (или «CVT»), которая включает бесступенчатый вариатор. CVT, в отличие от ступенчатой трансмиссии, настраивается на предоставление каждого дробного отношения в заданном диапазоне отношений скоростей. Например, в вышеупомянутом диапазоне отношений скоростей CVT в целом способна передать любое необходимое отношение скоростей между 1:2 и 2:1, которые включают отношения скоростей, такие как 1:1,9, 1:1,1, 1,3:1, 1,7:1 и т.д. Еще одни приводы используют прогрессивную трансмиссию (или «IVT»). IVT, подобно CVT, способна произвести каждое отношение скоростей в заданном диапазоне отношения скоростей. Однако, в отличие от CVT, IVT настраивается на передачу нулевой выходной скорости («механизированного нулевого» состояния) с постоянной входной скоростью. Следовательно, представляя определение отношения скоростей в качестве отношения входной скорости к выходной скорости, IVT способна передавать бесконечное множество отношений скоростей и, следовательно, IVT не ограничивается заданным диапазоном отношений скоростей. Следует отметить, что некоторые трансмиссии используют бесступенчатый вариатор, соединенный с другой зубчатой передачей и/или сцеплениями в расположении с раздельной подачей питания, для предоставления функциональности IVT. Однако в данном контексте термин IVT в первую очередь понимается в качестве охватывающего прогрессивный вариатор, который предоставляет функциональность IVT без необходимости соединения с дополнительной зубчатой передачей и/или сцеплениями.
[0005] Область трансмиссии механической мощности охватывает бесступенчатые или прогрессивные вариаторы нескольких типов. Например, одним широко известным классом бесступенчатых вариаторов является вариатор с ремнем и шкивом, изменяемого радиуса. Другие известные вариаторы включают гидростатические, тороидальные и конусно-кольцевые вариаторы. В некоторых случаях эти вариаторы соединяются с другой зубчатой передачей для предоставления функциональности IVT. Некоторые гидромеханические вариаторы могут предоставлять изменчивость бесконечного отношения без дополнительной зубчатой передачи. Некоторые вариаторы, бесступенчатые и/или прогрессивные, классифицируются в качестве фрикционных вариаторов или вариаторов, действующих за счет сцепления, поскольку они полагаются на сухое трение или упругогидродинамическую тягу, соответственно, для передачи крутящего момента через вариатор. Одним примером вариатора, действующего за счет сцепления, является шаровой вариатор, в котором сферические элементы зажимаются между элементами передачи крутящего момента, и тонкий слой упругогидродинамической жидкости служит в качестве канала передачи крутящего момента между сферическими элементами и элементами передачи крутящего момента.
[0006] В индустрии CVT/IVT существует постоянная необходимость в улучшениях трансмиссии и вариатора, которые заключаются в увеличении эффективности и гибкости узла, упрощении работы и снижении стоимости, размера и в том числе комплексности. Варианты осуществления способов, систем, подузлов, компонентов и т.д. CVT и/или IVT, раскрытые ниже, решают некоторые или все аспекты данной необходимости.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Системы и способы, описанные в данной заявке, имеют несколько особенностей, ни одна из которых полностью не отвечает необходимым им атрибутам. Не ограничивая объем изобретения, который состоит из пунктов формулы изобретения, представленных далее, его более значимые особенности будут далее кратко обсуждены. После рассмотрения этого обсуждения и, в частности, после прочтения раздела под названием «Подробное описание определенных вариантов осуществления» станет понятно, каким образом особенности системы и способов предоставляют ряд преимуществ над традиционными системами и способами.
[0008] Один аспект изобретения относится к трансмиссии, которая имеет первый диск, коаксиально установленный вокруг продольной оси трансмиссии, множество шаров, выполненных с возможностью наклона оси вращения, расположенных в угловом направлении вокруг продольной оси и находящихся в контакте с первым диском, и второй диск, коаксиально установленный вокруг продольной оси трансмиссии и находящийся в контакте с множеством шаров, выполненных с возможностью наклона оси вращения. В одном варианте осуществления трансмиссия снабжается роликом, расположенным радиально внутри шаров, выполненных с возможностью наклона оси вращения, и находящимся в контакте с ними. Трансмиссия имеет обойму, которая функционально соединена с шарами. В одном варианте осуществления трансмиссия имеет узел первого сцепления, который функционально соединен с обоймой и первым диском. Трансмиссия снабжается вторым узлом сцепления, который функционально соединен с обоймой и первым диском. По меньшей мере два из следующего: первый диск, второй диск, ролик и обойма выполнены с возможностью приема входной мощности. По меньшей мере одно из следующего: первый диск, второй диск, ролик и обойма выполнено с возможностью создания выходной мощности.
[0009] Другой аспект изобретения относится к способу управления трансмиссией с изменяемым передаточным отношением, которая имеет шары, выполненные с возможностью наклона оси вращения и находящиеся в контакте с первым кольцом, действующим за счет сцепления, и обоймой. Согласно способу получают ряд сигналов и определяют целевой рабочий режим. В одном варианте осуществления согласно способу определяют командный сигнал для узла одностороннего сцепления. В одном варианте осуществления способ имеет этап, согласно которому выборочно зацепляют узел одностороннего сцепления с кольцом, действующим за счет сцепления, и обоймой, по меньшей мере, частично на основе командного сигнала для узла одностороннего сцепления.
[0010] Еще один аспект изобретения относится к способу управления трансмиссией с изменяемым передаточным отношением, которая имеет ряд шаров, выполненных с возможностью наклона оси вращения и находящихся в контакте с первым кольцом, действующим за счет сцепления, и обоймой. В одном варианте осуществления способ имеет этап предоставления узла одностороннего сцепления, выборочно соединенного с первым кольцом, действующим за счет сцепления, и обоймой. Способ включает предоставление узла сцепления привода, выборочно соединенного с первым кольцом, действующим за счет сцепления, и обоймой. В одном варианте осуществления способ включает этап, согласно которому получают по меньшей мере один сигнал, указывающий на текущий рабочий режим трансмиссии. Согласно способу получают пользовательский командный сигнал и определяют целевой рабочий режим трансмиссии по меньшей мере частично на основе пользовательского командного сигнала. В некоторых вариантах осуществления согласно способу сравнивают целевой рабочий режим с текущим рабочим режимом. Способ имеет этап, согласно которому выдают команду узлу одностороннего сцепления на выборочную разблокировку первого кольца, действующего за счет сцепления, и/или обоймы. В одном варианте осуществления способ имеет этап, согласно которому выдают команду узлу сцепления привода на выборочное зацепление с первым кольцом, действующим за счет сцепления, и/или обоймой.
[0011] Другой аспект изобретения включает узел водила для прогрессивной трансмиссии (IVT), которая имеет группу сферических сателлитов с передачей мощности за счет сцепления, размещенных вокруг главной оси привода. В одном варианте осуществления узел водила имеет первую пластину водила, центр которой размещен коаксиально с главной осью привода. Первая пластина водила включает первое множество смещенных относительно друг друга в угловом направлении пазов, которые вырезаны в центре первой пластины водила и размещены в угловом направлении в этом центре. Каждый из смещенных в угловом направлении пазов из первого множества смещен под углом относительно центральной линии первой пластины водила. Центральная линия первой пластины водила перпендикулярна главной оси привода, таким образом, формируя систему координат. Система координат имеет ось Z, соответствующую главной оси привода, ось Y, соответствующую центральной линии, и ось X, перпендикулярную оси Y и оси Z. Первое множество смещенных под углом направляющих лежит в плоскости, сформированной осью X и осью Y. Каждый сателлит с передачей мощности за счет сцепления выполнен с возможностью наклона в плоскости, сформированной осью Y и осью Z. В одном варианте осуществления узел водила имеет вторую пластину водила, которая имеет центр, размещенный коаксиально с главной осью привода. Вторая пластина водила включает второе множество смещенных относительно друг друга в угловом направлении пазов, которые вырезаны в центре второй пластины водила и размещены в угловом направлении. Каждый из смещенных в угловом направлении пазов из второго множества имеет угловое смещение относительно центральной линии второй пластины водила. Центральная линия второй пластины водила перпендикулярна главной оси привода, таким образом, формируя систему координат. Система координат имеет ось Z, соответствующую главной оси привода, ось Y, соответствующую центральной линии, и ось X, перпендикулярную оси Y и оси Z. Вторе множество смещенных в угловом направлении направляющих лежит в плоскости, сформированной осью X и осью Y. Каждый сателлит с передачей мощности за счет сцепления выполнен с возможностью наклона в плоскости, сформированной осью Y и осью Z. Угловое смещение первого множества смещенных в угловом направлении пазов противоположно угловому смещению второго множества смещенных в угловом направлении пазов.
[0012] Еще один аспект изобретения включает способ управления трансмиссией с изменяемым передаточным отношением в транспортном средстве. В одном варианте осуществления трансмиссия имеет группу шаров, выполненных с возможностью наклона оси вращения, которые находятся в контакте с первым кольцом, действующим за счет сцепления, и обоймой. Способ включает этапы, согласно которым получают сигнал, указывающий на необходимый рабочий режим транспортного средства; получают сигнал, указывающий на скорость транспортного средства; и получают сигнал, указывающий на передаточное отношение. Способ имеет этап, на котором определяют команду крутящего момента по меньшей мере частично на основе рабочего режима, скорости транспортного средства и передаточного отношения. Согласно способу определяют команду отношения по меньшей мере частично на основе рабочего режима, скорости транспортного средства и передаточного отношения. Способ имеет этап, на котором определяют взвешенную команду крутящего момента и команду отношения по меньшей мере, частично на основе рабочего режима, скорости транспортного средства и передаточного отношения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0013] На фиг. 1 изображен схематический вид шаровой планетарной прогрессивной трансмиссии (IVT), которая имеет систему управления потоком мощности.
[0014] На фиг. 2 изображена блок-диаграмма алгоритма управления, который может быть использован для определения состояния пользовательской команды IVT, изображенной на фиг. 1.
[0015] На фиг. 3 изображена блок-диаграмма алгоритма управления, который может быть использован для установки условия парковки для IVT, изображенной на фиг. 1.
[0016] На фиг. 4 изображена блок-диаграмма алгоритма управления, который может быть использован для установки условия заднего хода для IVT, изображенной на фиг. 1.
[0017] На фиг. 5 изображена блок-диаграмма алгоритма управления, который может быть использован для установки нейтрального положения IVT, изображенной на фиг. 1.
[0018] На фиг. 6 изображена блок-диаграмма алгоритма управления, который может быть использован совместно с IVT, изображенной на фиг. 1.
[0019] На фиг. 7 изображена блок-диаграмма другого алгоритма управления, который может быть использован совместно с IVT, изображенной на фиг. 1.
[0020] На фиг. 8 изображена блок-диаграмма алгоритма режима ручного управления, который может быть использован совместно с IVT, изображенной на фиг. 1.
[0021] На фиг. 8А изображена блок-диаграмма алгоритма управления, который может быть использован в алгоритме, изображенном на фиг. 8.
[0022] На фиг. 8В изображена другая блок-диаграмма алгоритма управления, который может быть использован в алгоритме, изображенном на фиг. 8.
[0023] На фиг. 9 изображена блок-диаграмма другого алгоритма управления, который может быть использован совместно с IVT, изображенной на фиг. 1.
[0024] На фиг. 10 изображена блок-диаграмма алгоритма управления, который может быть использован для работы IVT в режиме CVT или режиме IVT, изображенной на фиг. 1.
[0025] На фиг. 10A изображена другая блок-диаграмма алгоритма управления, который может быть использован для работы IVT в режиме CVT или режиме IVT, изображенной на фиг. 1.
[0026] На фиг. 11 изображена блок-диаграмма алгоритма управления для выполнения условия запуска для IVT, изображенной на фиг. 1.
[0027] На фиг. 12 изображена таблица, в которой показаны рабочий режим и зацепление сцепления с определенными компонентами IVT, изображенной на фиг. 1.
[0028] На фиг. 13 изображен вид в поперечном разрезе шаровой планетарной прогрессивной трансмиссии (IVT), которая имеет систему управления потоком мощности.
[0029] На фиг. 14 изображен вид в поперечном разрезе другой шаровой планетарной прогрессивной трансмиссии (IVT), которая имеет систему управления потоком мощности.
[0030] На фиг. 15 изображен вид в поперечном разрезе еще одной шаровой планетарной прогрессивной трансмиссии (IVT), которая имеет систему управления потоком мощности.
[0031] На фиг. 16 изображен вид в поперечном разрезе шаровой планетарной прогрессивной трансмиссии (IVT), которая имеет систему управления потоком мощности и гидравлическую систему переключения.
[0032] На фиг. 17 изображен вид в поперечном разрезе другой шаровой планетарной прогрессивной трансмиссии (IVT), которая имеет систему управления потоком мощности и гидравлическую систему переключения.
[0033] На фиг. 18 изображено схематическое изображение узла водила, которое может быть использовано совместно с шаровой планетарной прогрессивной трансмиссией (IVT), которая имеет систему управления потоком мощности.
[0034] На фиг. 19 изображен вид в разрезе А-А узла водила, изображенного на фиг. 18.
[0035] На фиг. 20 изображен вид сверху пластины водила узла водила, изображенного на фиг. 18.
[0036] На фиг. 21 изображен вид сверху другой пластины водила узла водила, изображенного на фиг. 18.
[0037] На фиг. 22 изображен вид сверху другой пластины водила узла водила, изображенного на фиг. 18.
ПОДРОБНОЕ ОПИСАНИЕ ОПРЕДЕЛЕННЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0038] Предпочтительные варианты осуществления будут далее описаны со ссылкой на прилагаемые фигуры, где подобные цифры относятся к подобным элементам на всех фигурах. Терминология, используемая в описаниях ниже, не должна интерпретироваться в качестве ограничения или запрещения просто потому, что она используется совместно с подробными описаниями определенных конкретных вариантов осуществления изобретения. Более того, варианты осуществления изобретения могут включать несколько новых особенностей, ни одна из которых полностью не отвечает необходимым им атрибутам или которые являются существенными для применения описанных вариантов осуществления. Определенные варианты осуществления бесступенчатой трансмиссии (CVT) и прогрессивной трансмиссии (IVT), описанные в данной заявке, в целом относятся к типу, раскрытому в патенте США №6241636; 6419608; 6689012; 7011600; 7166052; заявке на патент США №11/243484; 11/543311; 12/198402; 12/251325 и заявках на патент договора о патентной кооперации PCT/US 2007/023315, PCT/IB 2006/054911, PCT/US 2008/068929 и PCT/US 2007/023315, PCT/US 2008/074496. Полное раскрытие каждого из этих патентов и заявок на патент таким образом включается в данную заявку посредством ссылки.
[0039] В данном контексте термины «функционально присоединенный», «функционально соединенный», «функционально связанный», «функционально присоединенный», «функционально соединенный», «функционально связанный» и подобные термины относятся к взаимному расположению (механическому, связанному, соединяющему) между элементами, следовательно, работа одного элемента приводит к соответствующей, последующей, или одновременной работе или запуску второго элемента. Следует отметить, что при использовании вышеупомянутых терминов для описания различных вариантов осуществления обычно описываются конкретные структуры или механизмы, которые связывают или соединяют элементы. Однако, если специально не указано иное, если используется один из вышеупомянутых терминов, термин указывает, что актуальная связь или соединение может принимать множество форм, которые в определенных случаях будут очевидно выражены для специалистов в соответствующей области техники.
[0040] В целях описания термин «радиальный» используется в данной заявке для указания направления или положения, которое перпендикулярно относительно продольной оси трансмиссии или вариатора. Термин «осевой» в данном контексте относится к направлению или положению вдоль оси, которая параллельна главной или продольной оси трансмиссии или вариатора. Для упрощения и краткости подобные компоненты иногда отмечаются одинаково.
[0041] Следует отметить, что ссылка в данной заявке на «тягу» не исключает приложения, где преобладающий или исключительный режим передачи мощности осуществляется посредством «трения». Не пытаясь установить категорическую разницу между приводами, действующим за счет сцепления, и фрикционными приводами в данной заявке, они могут быть в целом рассмотрены в качестве различных режимов передачи мощности. Приводы, действующим за счет сцепления, обычно включают передачу мощности между двумя элементами посредством поперечных сил в тонком слое жидкости, который удерживается между элементами. Жидкости, используемые в этих приложениях, обычно проявляют большие коэффициенты трения, чем традиционные нефтепродукты. Коэффициент (μ) сцепления представляет максимально доступные силы тяги, которые будут доступны на поверхностях соприкасающихся компонентов, и является измерением максимально доступного крутящего момента привода. Обычно фрикционные приводы в целом относятся к передаче мощности между двумя элементами посредством сил трения между двумя элементами. В целях настоящего раскрытия следует понимать, что описанные в данной заявке CVT и IVT могут работать в обоих режимах передачи мощности - за счет сцепления и фрикционной. Например, в варианте осуществления, где IVT используется для применения велосипеда, IVT иногда может работать в качестве фрикционного привода, а иногда в качестве привода за счет сцепления, в зависимости от условий крутящего момента и скорости, присутствующих во время работы.
[0042] Варианты осуществления, раскрытые в данной заявке, могут относиться к управлению вариатором и/или IVT с использованием обычно сферических сателлитов, каждый из которых имеет наклоняемую ось вращения (которая в данном контексте иногда рассматривается в качестве «планетарной оси вращения»), которая может быть отрегулирована для достижения необходимого отношения входной скорости и выходной скорости во время работы. В некоторых вариантах осуществления регулировка вышеупомянутой оси вращения включает угловое смещение планетарной оси в первой плоскости для достижения угловой регулировки планетарной оси вращения во второй плоскости, таким образом, регулируя отношение скоростей вариатора. Угловое смещение в первой плоскости рассматривается в данной заявке в качестве «скоса» или «угла скоса». Этот тип управления вариатором в целом описывается в заявке на патент США №12/198402 и 12/251325, при этом полное раскрытие каждой из этих заявок на патент таким образом включается в данную заявку посредством ссылки. В одном варианте система управления координирует использование угла скоса для генерирования сил между определенными соприкасающимися компонентами в вариаторе, что будет наклонять планетарную ось вращения во второй плоскости. Наклонение планетарной оси вращения регулирует отношение скоростей вариатора. Следует отметить, что варианты осуществления, раскрытые в данной заявке, могут быть реализованы с использованием других известных способов для переключения вариатора.
[0043] Варианты осуществления прогрессивной трансмиссии (IVT) и соответственно компоненты и способы управления будут далее описаны со ссылками на фиг. 1-22. На фиг. 1 изображена IVT 1, которая может быть использована во многих приложениях, включая без ограничения автомобили, легковые транспортные средства, гибридные транспортные средства, приводимые в движение мускульной силой человека, электрическим двигателем, двигателем внутреннего сгорания, промышленное оборудование, ветряные двигатели и т.д. Любое техническое приложение, которое требует модулирования передачи механической мощности между входной мощностью и поглощением мощности (например, нагрузкой), может реализовать варианты осуществления IVT 1 в своей силовой передаче. Например, односторонние кулачковые сцепления могут быть заменены стандартными системами сухого или гидравлического сцепления, где одностороннее действие реализуется посредством управления сцеплением.
[0044] Все еще ссылаясь на фиг. 1, в одном варианте осуществления IVT 1 включает главный вал 2, который главным образом определяет продольную ось IVT 1. Главный вал 2 соединяется с источником (не показанным) входной мощности. В некоторых вариантах осуществления источник входной мощности может являться двигателем внутреннего сгорания, электромотором или любым источником крутящего момента. Главный вал 2 функционально соединяется со сцеплением 4 узла привода двигателя. Узел сцепления привода двигателя может включать ряд элементов сцепления, настроенных на выборочное зацепление определенных компонентов IVT 1. В качестве пояснительного примера узла сцепления 4 привода двигателя изображен на фиг. 1 и включает элементы 4А и 4В сцепления. В одном варианте осуществления IVT 1 включает узел одностороннего сцепления 6, функционально соединенное с не вращающимся компонентом, таким как картер. Узел одностороннего сцепления 6 может включать ряд элементов сцепления, настроенных на выборочное зацепление определенных компонентов IVT 1. В качестве пояснительного примера узел одностороннего сцепления 6 изображен на фиг. 1 и включает элементы 6А и 6В сцепления.
[0045] Все еще ссылаясь на фиг. 1, IVT 1 включает множество узлов сателлитов 8 с передачей мощности за счет сцепления, размещенных под углом вокруг главного вала 2. Каждый узел сателлита 8 с передачей мощности за счет сцепления снабжается наклоняемой осью вращения 9. Первая и вторая детали 10, 12 водила настраиваются на направление наклоняемых осей вращения 9. Главный вал 2 соединяется посредством узла сцепления 4 с первым кольцевым ведущим элементом 5 или первой деталью 10 водила. Первая и вторая детали 10,12 водила имеют общую ось с главным валом 2. В одном варианте осуществления каждый узел сателлита 8 с передачей мощности за счет сцепления соединяется с первым и вторым кольцами 14, 16, действующими за счет сцепления, соответственно. Каждый узел сателлита 8 с передачей мощности за счет сцепления находится в контакте с узлом ролика 18А, 18В в радиально внутреннем местоположении. Первое кольцо 14, действующее за счет сцепления, соединяется с первым узлом генератора 20 осевой силы. Второе кольцо 16, действующее за счет сцепления, соединяется со вторым генератором 24 осевой силы. Второе кольцо 16, действующего за счет сцепления, и второй генератор 24 осевой силы соединяются с интерфейсом 26 выходной мощности. Интерфейс 26 выходной мощности может быть соединен с нагрузкой (не показанной). Узлы сателлитов 8 с передачей мощности за счет сцепления, первое и второе кольца 14, 16, действующие за счет сцепления, и первая и вторая элементы 10, 12 водила вместе могут рассматриваться в качестве части IVT 1, именуемой «вариатором».
[0046] В одном варианте осуществления узла сцепления 4 привода двигателя может быть функционально соединено по меньшей мере с первой деталью 10 водила и/или первым кольцевым ведущим элементом 5. В качестве пояснительного примера элемент 4А сцепления может быть выборочно соединен с первым кольцевым ведущим элементом 5, элемент 4В сцепления может быть выборочно соединен с первой деталью 10 водила. Узел одностороннего сцепления 6 может быть функционально соединено по меньшей мере с первой деталью 10 водила и/или первым кольцом 14, действующим за счет сцепления. В качестве пояснительного примера элемент 6А сцепления выборочно соединяется с первым кольцом 14, действующим за счет сцепления; элемент 6В сцепления выборочно соединяется с первой деталью 10 водила. В других вариантах осуществления элемент 6А сцепления может быть выборочно соединен с первым кольцевым ведущим элементом 5.
[0047] Во время работы IVT 1 узла сцепление 4 привода двигателя и узел одностороннего сцепления 6 могут регулироваться системой (не показанной) управления для предоставления регулируемых скоростей передвижения вперед и назад. В одном варианте осуществления система управления является электрогидравлической системой, которая имеет ряд электронно-управляемых гидравлических клапанов, соединенных с элементами гидравлического сцепления, такими как элементы 4А, 4В, 6А и 6В сцепления. В целях описания термин «режим CVT» может быть использован для ссылки на рабочие условия, в которых IVT 1 предоставляет скорость передвижения вперед; термин «режим IVT» может быть использован для ссылки на рабочие условия, в которых IVT 1 предоставляет скорости передвижения вперед и назад. В некоторых вариантах осуществления режим CVT связан с входной мощностью, функционально соединенной с первым кольцом 14, действующим за счет сцепления. В других вариантах осуществления режим IVT связан с входной мощностью, функционально соединенной с первой деталью 10 водила. Процессы управления далее будут описаны в качестве пояснительного примера использования узла сцепления 6 привода двигателя и узла одностороннего сцепления 4, выборочно зацепляющие компоненты IVT 1 для предоставления режима CVT и режима IVT. Эти процессы управления могут позволить реализацию IVT 1 в автомобиле без использования преобразователя крутящего момента или многоскоростной коробки передач.
[0048] Обращаясь теперь к фиг. 2, в одном варианте осуществления процесс 30 управления трансмиссией может быть реализован, например, для управления IVT 1. В одном варианте осуществления процесс 30 управления трансмиссией начинается с этапа 31 и переходит к этапу 32, где получается пользовательский командный сигнал. В некоторых вариантах осуществления пользовательский командный сигнал, полученный на этапе 32, указывает на положение рычага управления или положение PRNDL, что характерно для автомобиля. Процесс 30 управления трансмиссией переходит к этапу 33, где оценивается положение PRNDL. Если положение PRNDL соответствует «Р» или команде для парковки, тогда процесс 30 управления трансмиссией переходит к этапу 34, где выполняется процесс управления парковкой. Затем процесс 30 управления трансмиссией переходит к конечному этапу 35. Если этап 33 дает отрицательный результат, тогда процесс 30 управления трансмиссией переходит к этапу 36. Положение PRNDL оценивается на этапе 36. Если положение PRNDL соответствует «R» или команде для заднего хода, тогда процесс 30 управления трансмиссией переходит к этапу 37, где выполняется процесс управления задним ходом. Затем процесс 30 управления трансмиссией переходит к конечному этапу 38. Если этап 36 дает отрицательный результат, тогда процесс 30 управления трансмиссией переходит к этапу 39, в котором оценивается положение PRNDL. Если положение PRNDL соответствует «N» или команде для нейтрального положения, тогда процесс 30 управления трансмиссией переходит к выполнению процесса управления нейтральным положением на этапе 40 и заканчивается на этапе 41.
[0049) Все еще ссылаясь на фиг. 2, если этап 39 дает отрицательный результат, тогда процесс 30 управления трансмиссией переходит к этапу 42, на котором оценивается положение PRNDL. Если положение PRNDL соответствует «D» или команде движение вперед, тогда процесс 30 управления трансмиссией переходит к этапу 48А. Этап 48А оценивает выбор ручного режима, осуществляемый пользователем. Например, переключатель (не показанный) может быть использован для указания необходимости режима ручного переключения вариатора и/или трансмиссии. Если этап 48А дает положительный результат, тогда процесс 30 управления трансмиссией переходит к этапу 49, где выполняется режим ручного управления. Затем процесс 30 управления трансмиссией переходит к конечному этапу 50. Если этап 48А дает отрицательный результат, тогда процесс 30 управления трансмиссией переходит к этапу 43, где выполняется процесс управления движением вперед. Затем процесс 30 управления трансмиссией завершается на этапе 44. Если этап 42 дает отрицательный результат, тогда процесс 30 управления трансмиссией переходит к этапу 45, на котором оценивается положение PRNDL. Если положение PRNDL соответствует «L» или команде для положения пониженной передачи, тогда процесс 30 управления трансмиссией переходит к этапу 48В. Этап 48В оценивает запрос на ручной режим, осуществляемый пользователем. Если запрос на ручной режим, осуществляемый пользователем, является отрицательным и этап 45 дает положительный результат, тогда процесс 30 управления трансмиссией переходит к этапу 46, где выполняется процесс управления положением пониженной передачи. Затем процесс 30 управления трансмиссией завершается на этапе 47. Если этап 45 дает отрицательный результат, тогда процесс 30 управления трансмиссией завершается на этапе 51.
[0050] Ссылаясь теперь на фиг. 3, в одном варианте осуществления процесс 34 управления парковкой начинается с этапа 53 и переходит к этапу 54, где получаются сигналы от процесса 30 управления трансмиссией и/или датчиков транспортного средства. В некоторых вариантах осуществления сигналы могут включать выходную скорость трансмиссии, скорость транспортного средства, число оборотов двигателя, положение дроссельной заслонки и/или торможения и положения рычага управления, такие как характерный указатель PRNDL. В других вариантах осуществления процесс 30 управления трансмиссией передает командный сигнал, по меньшей мере, частично на основе, например, результата этапа 33. Процесс 34 управления парковкой переходит к этапу 55, где оценивается скорость и/или выходная скорость транспортного средства. Если выходная скорость не равна нулю, тогда процесс управления парковкой переходит к конечному этапу 58. Следует отметить, что в некоторых вариантах осуществления может быть реализован процесс управления, который следит за рабочими условиями для безопасности и в некоторых случаях может предоставлять корректирующие действия, если запрос пользователя приведет к возможному повреждению трансмиссии или условию небезопасного вождения. Если выходная скорость соответствует нулю, тогда процесс 34 управления парковкой переходит к этапу 56, где узлу одностороннего сцепления 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления, и первого элемента 10 водила. Затем процесс 34 управления парковкой переходит к этапу 57, где узлу сцепления 4 привода двигателя выдается команда на высвобождение, например, первого кольца 14, действующего за счет сцепления, и первой детали 10 водила. Затем процесс 34 управления парковкой завершается на этапе 58.
[0051] Обращаясь теперь к фиг. 4, в одном варианте осуществления процесс 37 управления задним ходом начинается с этапа 60 и переходит к этапу 61, где получаются сигналы. В одном варианте осуществления сигналы, принятые на этапе 61, отправляются процессом 30 управления трансмиссией. Например, процесс 30 управления трансмиссией передает командный сигнал, по меньшей мере, частично на основе результата этапа 36. В других вариантах осуществления сигналы могут включать выходную или входную скорость, скорость транспортного средства, измеренные параметры двигателя или любые другие сигналы, указывающие на рабочее условие. Процесс 37 управления задним ходом переходит к этапу 62, где оценивается выходная скорость. Если выходная скорость не соответствует нулю, тогда процесс 37 управления задним ходом переходит к конечному этапу 63. Если выходная скорость соответствует нулю, тогда процесс 37 управления задним ходом переходит к этапам 64, 65, 66, 67, 68, 69. Следует отметить, что этапы 64, 65, 66, 67, 68, 69 представлены на фиг. 4 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 64, 65, 66, 67, 68, 69, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Например, тайминг и продолжительность этапов 64, 65, 66, 67, 68, 69 могут произвольно совпадать для производства необходимой производительности. На этапе 64 одностороннему сцеплению 6 выдается команда на разблокировку от первой детали 10 водила. На этапе 65 сцеплению 4 привода двигателя выдается команда на зацепление первой детали 10 водила. На этапе 66 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первого кольца 14, действующего за счет сцепления. На этапе 67 одностороннему сцеплению 6 выдается команда на зацепление первого кольца, действующего за счет сцепления. На этапе 68 одностороннему сцеплению 6 выдается команда на высвобождение первой детали 10 водила. На этапе 69 одностороннему сцеплению 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления. Процесс 37 управления задним ходом переходит к этапу 70. Этап 70 может, например, выполнять управление частью IVT 1, именуемой вариатором, и поддерживать вариатор в обратном направлении. В одном варианте осуществления обратное направление соответствует диапазону углов наклона наклоняемых осей 9. Процесс 37 управления задним ходом завершается на этапе 71.
[0052] Обращаясь теперь к фиг. 5, в одном варианте осуществления процесс 40 управления нейтральным положением начинается с этапа 80 и переходит к этапу 81, где получается ряд сигналов. Сигналы могут исходить от датчиков, установленных на IVT 1, двигателе и/или транспортном средстве. В некоторых вариантах осуществления сигналы могут быть получены, например, от процесса 30 управления трансмиссией. В некоторых вариантах осуществления процесс 40 управления нейтральным положением переходит к этапу 82, где получается по меньшей мере один пользовательский командный сигнал. Пользовательский командный сигнал, принятый на этапе 82, может указывать на необходимое условие буксировки. В качестве пояснительного примера пользователь транспортного средства, оснащенного IVT 1, может использовать переключатель для указания необходимости в буксировке транспортного средства при заглушенном двигателе. Процесс 40 управления нейтральным положением переходит к этапу 83, где оценивается режим буксировки. Если результат этапа 83 положительный, то процесс 40 управления нейтральным положением переходит к этапу 84, где выполняется процесс управления выходным разъединением. Например, этап 84 может выдавать команду сцеплению или механизму (не показанному) на механическое отделение колес транспортного средства от IVT 1. Затем процесс управления выходным разъединением завершается на этапе 85.
[0053J Все еще ссылаясь на фиг. 5, если результат этапа 83 отрицательный, то процесс 40 управления нейтральным положением переходит к этапам 86, 87, 88, 89, 90, 91. Следует отметить, что этапы 86, 87, 89, 90, 91 представлены на фиг. 5 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 86, 87, 88, 89, 90, 91, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Более того, тайминг и продолжительность этапов 86, 87, 88, 89, 90, 91 могут произвольно совпадать для обеспечения необходимой производительности. На этапе 86 одностороннему сцеплению 6 выдается команда на разблокировку от первой детали 10 водила. На этапе 87 сцеплению 4 привода двигателя выдается команда на зацепление первой детали 10 водила. На этапе 88 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первого кольца 14, действующего за счет сцепления. На этапе 88 одностороннему сцеплению 6 выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 90 одностороннему сцеплению 6 выдается команда на высвобождение первой детали 10 водила. На этапе 91 одностороннему сцеплению 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления. Процесс 40 управления нейтральным положением переходит к этапу 92. Этап 92 может, например, выполнять управление частью IVT 1, именуемой вариатором, и поддерживать вариатор в условии нулевой выходной скорости. В одном варианте осуществления нулевая выходная скорость соответствует углу наклона наклоняемых осей 9, которые в основном параллельны продольной оси IVT 1. Процесс 40 управления нейтральным положением завершается на этапе 93.
[0054] Ссылаясь теперь на фиг. 6, в одном варианте осуществления процесс 43 управления движением вперед начинается с этапа 102 и переходит к этапу 104, где получаются сигналы. Сигнал, полученный на этапе 104, может указывать на сигнал переключения передачи, положение дроссельной заслонки транспортного средства и/или сигнал выходной скорости. Процесс 43 управления приводом переходит к этапу 106, где получается сигнал, который указывает на текущий рабочий режим трансмиссии. В некоторых вариантах осуществления количество рабочих режимов может быть определено относительно рабочего условия IVT 1. Например, определенные рабочие условия могут быть достигнуты в режиме «CVT», тогда как другие рабочие условия могут быть достигнуты в режиме «IVT». Процесс 43 управления приводом может быть реализован для управления сцеплением 4 привода двигателя и/или односторонним сцеплением 6 для достижения соответствующего рабочего режима для производительности транспортного средства, команда на который выдается пользователем.
[0055] Процесс 43 управления движением вперед переходит к этапу 108, где получается командный сигнал. В одном варианте осуществления командный сигнал указывает на необходимую выходную скорость и/или необходимый рабочий режим трансмиссии. Процесс 43 управления движением вперед переходит к этапу 110, где определяется целевой рабочий режим трансмиссии. В одном варианте осуществления целевой рабочий режим трансмиссии является функцией, по меньшей мере, частично на основе выходной скорости трансмиссии, отношения скоростей трансмиссии, показаний датчика дроссельной заслонки/торможения, числа оборотов двигателя и/или состояний ускорения транспортного средства. В некоторых вариантах осуществления целевой рабочий режим трансмиссии является функцией, по меньшей мере, частично на основе скорости транспортного средства. В других вариантах осуществления целевой рабочий режим трансмиссии является функцией, по меньшей мере, частично на основе положения рычага управления. В одном варианте осуществления этап 110 оценивает таблицу преобразований с использованием вышеупомянутых сигналов. В некоторых вариантах осуществления этап 110 выполняет алгоритм для определения целевого передаточного отношения.
[0056] Все еще ссылаясь на фиг. 6, в одном варианте осуществления процесс 43 управления движением вперед включает этап 112, где оценивается целевой рабочий режим трансмиссии, определенный на этапе 110. Если целевой рабочий режим трансмиссии, определенный на этапе 110, соответствует режиму «CVT», то процесс управления продолжается на этапе 114. На этапе 114 оценивается текущий рабочий режим трансмиссии. Если текущий рабочий режим трансмиссии соответствует целевому рабочему режиму трансмиссии «CVT», тогда процесс 43 управления движением вперед переходит к конечному этапу 116. Если целевой рабочий режим трансмиссии, определенный на этапе 110, не соответствует режиму «CVT», то процесс 43 управления продолжается на этапе 118. На этапе 118 текущий рабочий режим трансмиссии сравнивается с целевым рабочим режимом трансмиссии. Если целевой рабочий режим трансмиссии соответствует текущему рабочему режиму трансмиссии, то процесс 43 управления движением вперед продолжается в конечном состоянии 120. Если целевой рабочий режим трансмиссии не соответствует текущему рабочему режиму трансмиссии, то процесс 43 управления переходит к этапам 122, 124, 125, 126, 127, 128. Следует отметить, что этапы 122, 124, 125, 126, 127, 128 представлены на фиг. 6 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 122, 124, 125, 126, 127, 128, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Более того, тайминг и продолжительность этапов 122, 124, 125, 126, 127, 128 могут произвольно совпадать для производства необходимой производительности. Процесс 43 управления движением вперед включает этап 122, на котором отправляется команда на разблокировку узла одностороннего сцепления, такого как узел одностороннего сцепления 6. В одном варианте осуществления узла одностороннего сцепления 6 будет разблокировано от первой детали 10 водила на этапе 122. Процесс 43 управления движением вперед включает этап 124, на котором узлу сцепления привода двигателя, такому как узел сцепления 4 привода двигателя, выдается команда на зацепление первой детали 10 водила. На этапе 125 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первого кольца 14, действующего за счет сцепления. Процесс 43 управления движением вперед включает этап 126, на котором узлу одностороннего сцепления 6 выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 127 одностороннему сцеплению 6 выдается команда на высвобождение первой детали 10 водила. Процесс 43 управления движением вперед включает этап 128, на котором одностороннему сцеплению 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления. При выполнении этапов 122, 124, 125, 126, 127, 128 процесс 43 управления движением вперед переходит к конечному этапу 130.
[0057] Снова ссылаясь на фиг. 6, в одном варианте осуществления процесс 43 управления движением вперед включает этап 114. На этапе 114 оценивается текущий рабочий режим трансмиссии. Если текущий рабочий режим трансмиссии не соответствует целевому рабочему режиму трансмиссии «CVT», тогда процесс 43 управления движением вперед переходит к этапам 132, 134, 135, 136, 137, 138. Следует отметить, что этапы 132, 134, 135, 136, 137, 138 представлены на фиг. 6 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 132, 134, 135, 136, 137, 138, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Тайминг и продолжительность этапов 132, 134, 135, 136, 137, 138 могут произвольно совпадать для производства необходимой производительности. Процесс 43 управления движением вперед включает этап 132, на котором узлу одностороннего сцепления 6 выдается команда на разблокировку первого кольца 14, действующего за счет сцепления. Процесс 43 управления движением вперед включает этап 134, на котором узлу сцепления 4 привода двигателя выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 135 узлу сцепления 4 привода двигателя выдается команда на высвобождение или расцепление первой детали 10 водила. Процесс 43 управления движением вперед включает этап 136, на котором узел одностороннего сцепления 6 выдается команда на зацепление первой детали 10 водила. На этапе 137 узлу одностороннего сцепления 6 выдается команда на высвобождение первого кольца 14, действующего за счет сцепления. Зацепление первой детали 10 водила и высвобождение первого кольца 14, действующего за счет сцепления, могут являться практически одновременными действиями. Процесс 43 управления движением вперед включает этап 138, на котором узлу одностороннего сцепления 6 выдается команда на блокировку первой детали 10 водила. При выполнении этапов 132, 134, 135, 136, 137, 138 процесс 43 управления переходит к конечному этапу 140.
[0058] Во время работы IVT 1 процесс 43 управления движением вперед может быть реализован для предоставления прогрессивного диапазона в прямом и обратном направлениях. В некоторых приложениях, таких как автомобиль, необходимо иметь диапазоны скоростей повышающей и понижающей передач и диапазоны скорости заднего хода. Реализация процесса 43 управления движением вперед может позволить транспортному средству осуществлять запуск с нулевой скорости посредством работы IVT 1 и без использования характерного преобразователя крутящего момента.
[0059] Обращаясь теперь к фиг. 7, в одном варианте осуществления процесс 46 управления понижением передачи начинается с этапа 150 и переходит к этапу 151, где получается ряд сигналов. В одном варианте осуществления этап 151 получает сигналы от процесса 30 управления трансмиссией, например, для указания пользовательской команды для условия понижения передачи. Процесс 46 управления понижением передачи переходит к этапам 152, 153, 154, 155, 156, 157. Следует отметить, что этапы 152, 153, 154, 155, 156, 157 представлены на фиг. 7 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 152, 153, 154, 155, 156, 157, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Более того, тайминг и продолжительность этапов 152, 153, 154, 155, 156, 157 могут произвольно совпадать для производства необходимой производительности. На этапе 152 одностороннему сцеплению 6 выдается команда на разблокировку первой детали 10 водила. На этапе 153 сцеплению 4 привода двигателя выдается команда на зацепление первой детали 10 водила. На этапе 153 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первого кольца 14, действующего за счет сцепления. На этапе 155 одностороннему сцеплению 6 выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 155 одностороннему сцеплению 6 выдается команда на высвобождение первой детали 10 водила. На этапе 156 одностороннему сцеплению 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления. Процесс 46 управления понижением передачи переходит к этапу 158. Этап 158 может, например, выполнять управление частью IVT 1, именуемой вариатором, и поддерживать вариатор в условии прямого направления. В одном варианте осуществления прямое направление соответствует диапазону углов наклона наклоняемых осей 9. Процесс 46 управления понижением передачи завершается на этапе 159.
[0060] Ссылаясь теперь на фиг. 8, в одном варианте осуществления процесс 49 ручного управления начинается с этапа 160 и переходит к этапу 161. Ряд сигналов получается на этапе 161, который может включать сигналы, указывающие на рабочие условия транспортного средства, и/или сигналы, генерируемые процессами управления, такими как процесс 30 управления трансмиссией. Процесс 49 ручного управления переходит к этапу 162. Этап 162 оценивает сигнал от рычага управления. Если положение соответствует «D» или команде движение вперед, тогда этап 162 дает положительный результат. Если на этапе 162 производится отрицательный результат, тогда процесс 49 ручного управления переходит к этапу 163. Этап 163 оценивает сигнал от рычага управления. Если положение соответствует «L» или команде понижение передачи, тогда этап 163 дает положительный результат. Если этап 163 дает отрицательный результат, тогда процесс 49 ручного управления завершается на этапе 164. Если этап 163 дает положительный результат, тогда процесс 49 ручного управления переходит к этапам 165, 166, 167, 168, 169, 170. Следует отметить, что этапы 165, 166, 167, 168, 169, 170 представлены на фиг. 8 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 165, 166, 167, 168, 169, 170, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Более того, тайминг и продолжительность этапов 165, 166, 167, 168, 169, 170 могут произвольно совпадать для производства необходимой производительности. На этапе 165 одностороннему сцеплению 6 выдается команда на разблокировку первой детали 10 водила. На этапе 166 сцеплению 4 привода двигателя выдается команда на зацепление первой детали 10 водила. На этапе 167 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первого кольца 14, действующего за счет сцепления. На этапе 168 одностороннему сцеплению 6 выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 169 одностороннему сцеплению 6 выдается команда на высвобождение первой детали 10 водила. На этапе 170 одностороннему сцеплению 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления. Процесс 49 ручного управления переходит к этапу 171. Этап 171 выполняет алгоритм управления для пользовательского управления частью IVT 1, именуемой вариатором. Например, пользователь может использовать вспомогательный или двусторонний рычаг управления для осуществления необходимого изменения в передаточном отношении, такого как переключение вверх или переключение вниз. Процесс 49 ручного управления завершается на этапе 172.
[0061] Все еще ссылаясь на фиг. 8, если этап 162 дает положительный результат, тогда процесс 49 ручного управления переходит к этапу 173. Этап 173 предоставляет алгоритм управления мониторингом безопасности, который может ограничить работу IVT 1 в рамках предопределенных рабочих условий. Например, этап 173 может автоматически перейти к этапу 164, если условия скорости не соответствуют работе ручного привода. Процесс 49 ручного управления переходит к этапам 174, 175, 176, 177, 178, 179. Следует отметить, что этапы 174, 175, 176, 177, 178, 179 представлены на фиг. 8 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 174, 175, 176, 177, 178, 179, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Более того, тайминг и продолжительность этапов 174, 175, 176, 177, 178, 179 могут произвольно совпадать для производства необходимой производительности. На этапе 174 одностороннему сцеплению 6 выдается команда на разблокировку первого кольца 14, действующего за счет сцепления. На этапе 175 сцеплению 4 привода двигателя выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 176 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первой детали 10 водила. На этапе 177 одностороннему сцеплению 6 выдается команда на зацепление первой детали 10 водила. На этапе 178 одностороннему сцеплению 6 выдается команда на высвобождение первого кольца 14, действующего за счет сцепления. На этапе 179 одностороннему сцеплению 6 выдается команда на блокировку первой детали 10 водила. Процесс 49 ручного управления переходит к этапу 180. Этап 180 выполняет алгоритм управления для пользовательского управления частью IVT 1, именуемой вариатором. Например, пользователь может использовать вспомогательный или двусторонний рычаг управления для осуществления необходимого изменения в передаточном отношении, такого как переключение вверх или переключение вниз. Процесс 49 ручного управления завершается на этапе 181.
[0062] Ссылаясь теперь на фиг. 8А, в одном варианте осуществления процесс 171 начинается с этапа 1711 и переходит к этапу 1712, где получается ряд сигналов. Процесс 171 переходит к этапу 1713, где оценивается положение педали газа. Процесс 171 параллельно переходит к этапу 1714, где оценивается сигнал, указывающий на ручную команду от пользователя. Процесс 171 переходит от этапа 1713 к процессу 1715, где число оборотов двигателя регулируется на основе оценки на этапе 1713. Процесс 171 переходит от этапа 1714 к процессу 1716, где определяется и применяется крутящий момент переключения на основе оценки на этапе 1714. Процесс 171 завершается на этапе 1717.
[0063] Обращаясь теперь к фиг. 8В, в одном варианте осуществления процесс 180 может начинаться с этапа 1801 и переходить к этапу 1802, где получается ряд сигналов. Процесс 180 переходит к процессу 1803, где дроссельная заслонка двигателя регулируется, по меньшей мере, частично на основе сигналов, полученных на этапе 1802. Процесс 180 параллельно переходит от этапа 1802 к процессу 1804, где пользовательская команда через ручной рычаг, например, используется для управления передаточным отношением. Процесс 180 завершается на этапе 1805.
[0064] Ссылаясь теперь на фиг. 9, в одном варианте осуществления процесс 43 управления движением вперед начинается с этапа 190 и переходит к этапу 191, где получаются сигналы. Сигнал, полученный на этапе 191, может указывать на сигнал переключения передачи, положение дроссельной заслонки транспортного средства и/или сигнал выходной скорости. Процесс 43 управления движением вперед переходит к этапу 192, где получается сигнал, который указывает на текущий рабочий режим трансмиссии. В некоторых вариантах осуществления количество рабочих режимов может быть определено относительно рабочего условия IVT 1. Например, определенные рабочие условия могут быть достигнуты в режиме «CVT», тогда как другие рабочие условия могут быть достигнуты в режиме «IVT». Процесс 43 управления движением вперед может быть реализован для управления сцеплением 4 привода двигателя и/или односторонним сцеплением 6 для достижения соответствующего рабочего режима для производительности транспортного средства, команда на который выдается пользователем.
[0065] Процесс 43 управления движением вперед переходит к этапу 193, где получается командный сигнал. В одном варианте осуществления командный сигнал указывает на необходимую выходную скорость и/или необходимый рабочий режим трансмиссии. Процесс 43 управления движением вперед переходит к этапу 194, где определяется целевой рабочий режим трансмиссии. В одном варианте осуществления целевой рабочий режим трансмиссии является функцией, по меньшей мере, частично на основе выходной скорости трансмиссии, отношения скоростей трансмиссии, показаний датчика дроссельной заслонки/торможения, числа оборотов двигателя и/или состояний ускорения транспортного средства. В некоторых вариантах осуществления целевой рабочий режим трансмиссии является функцией, по меньшей мере, частично на основе скорости транспортного средства. В других вариантах осуществления целевой рабочий режим трансмиссии является функцией, по меньшей мере, частично на основе положения рычага управления. В одном варианте осуществления этап 194 оценивает таблицу преобразований с использованием вышеупомянутых сигналов. В некоторых вариантах осуществления этап 194 выполняет алгоритм для определения целевого передаточного отношения.
[0066] Все еще ссылаясь на фиг. 9, в одном варианте осуществления процесс 43 управления движением вперед включает этап 195, где оценивается целевой рабочий режим трансмиссии, определенный на этапе 194. Если целевой рабочий режим трансмиссии, определенный на этапе 194, соответствует режиму «CVT», то процесс управления продолжается на этапе 196. На этапе 196 оценивается текущий рабочий режим трансмиссии. Если текущий рабочий режим трансмиссии соответствует целевому рабочему режиму трансмиссии «CVT», тогда процесс 43 управления движением вперед переходит к рабочему процессу 197, в котором выполняется алгоритм управления для работы трансмиссии в текущем режиме. Процесс 43 управления переходит к конечному этапу 198.
[0067] Если целевой рабочий режим трансмиссии, определенный на этапе 194, не соответствует режиму «CVT», то процесс 43 управления продолжается на этапе 199. На этапе 199 текущий рабочий режим трансмиссии сравнивается с целевым рабочим режимом трансмиссии. Если целевой рабочий режим трансмиссии соответствует текущему рабочему режиму трансмиссии, то процесс 43 управления движением вперед продолжается в рабочем процессе 200, в котором выполняется алгоритм управления для работы трансмиссии в текущем режиме трансмиссии. Процесс 43 управления переходит к конечному этапу 201.
[0068] Если целевой рабочий режим трансмиссии не соответствует текущему рабочему режиму трансмиссии, то процесс 43 управления переходит к этапам 202, 203, 204, 205, 206, 207. Следует отметить, что этапы 202, 203, 204, 205, 206, 207 представлены на фиг. 9 в качестве пояснительного примера и порядок, в котором осуществляется выполнение этапов 202, 203, 204, 205, 206, 207, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Более того, тайминг и продолжительность этапов 202, 203, 204, 205, 206, 207 могут произвольно совпадать для производства необходимой производительности. Процесс 43 управления движением вперед включает этап 202, на котором отправляется команда на разблокировку узла одностороннего сцепления, такого как узел одностороннего сцепления 6. В одном варианте осуществления узла одностороннего сцепления 6 будет разблокирован от первой детали 10 водила на этапе 202. Процесс 43 управления движением вперед включает этап 203, на котором узел сцепления привода двигателя, такому как узел сцепления 4 привода двигателя, выдается команда на зацепление первой детали 10 водила. На этапе 204 сцеплению 4 привода двигателя выдается команда на высвобождение или расцепление первого кольца 14, действующего за счет сцепления. Процесс 43 управления движением вперед включает этап 205, на котором узлу одностороннего сцепления 6 выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 206 одностороннему сцеплению 6 выдается команда на высвобождение первой детали 10 водила. Процесс 43 управления движением вперед включает этап 207, на котором одностороннему сцеплению 6 выдается команда на блокировку первого кольца 14, действующего за счет сцепления. При выполнении этапов 202, 203, 204, 205, 206, 207 процесс 43 управления движением вперед переходит к конечному этапу 208.
[0069] Снова ссылаясь на фиг. 9, в одном варианте осуществления процесс 43 управления движением вперед включает этап 196. На этапе 196 оценивается текущий рабочий режим трансмиссии. Если текущий рабочий режим трансмиссии не соответствует целевому рабочему режиму трансмиссии «CVT», тогда процесс 43 управления движением вперед переходит к этапам 209, 210, 211, 212, 213, 214. Следует отметить, что этапы 209, 210, 211, 212, 213, 214 представлены на фиг. 9 в качестве пояснительного примера и порядок, на котором осуществляется выполнение этапов 209, 210, 211, 212, 213, 214, зависит от необходимой производительности трансмиссии и при необходимости может быть упорядочен конструктором. Тайминг и продолжительность этапов 209, 210, 211, 212, 213, 214 могут произвольно совпадать для производства необходимой производительности. Процесс 43 управления движением вперед включает этап 209, на котором узлу одностороннего сцепления 6 выдается команда на разблокировку первого кольца 14, действующего за счет сцепления. Процесс 43 управления движением вперед включает этап 210, на котором узлу сцепления 4 привода двигателя выдается команда на зацепление первого кольца 14, действующего за счет сцепления. На этапе 211 узлу сцепления 4 привода двигателя выдается команда на высвобождение или расцепление первой детали 10 водила. Процесс 43 управления движением вперед включает этап 212, на котором узлу одностороннего сцепления 6 выдается команда на зацепление первой детали 10 водила. На этапе 213 узлу одностороннего сцепления 6 выдается команда на высвобождение первого кольца 14, действующего за счет сцепления. Зацепление первой детали 10 водила и высвобождение первого кольца 14, действующего за счет сцепления, могут являться практически одновременными действиями. Процесс 43 управления движением вперед включает этап 214, на котором узлу одностороннего сцепления 6 выдается команда на блокировку первой детали 10 водила. При выполнении этапов 209, 210, 211, 212, 213, 214 процесс 43 управления переходит к конечному этапу 215.
[0070] Обращаясь теперь к фиг. 10, в одном варианте осуществления рабочий процесс 197, 200 может начинаться с этапа 231 и переходить к этапу 232, где получается сигнал, указывающий на текущий рабочий режим. Например, рабочий режим может являться режимом «CVT» или «IVT». Процесс 197,200 переходит к этапу 233, где получается ряд сигналов. Например, сигналы могут указывать на положение дроссельной заслонки, отношение скоростей и число оборотов двигателя, скорость транспортного средства и/или сигналы, связанные с актуатором переключения. Процесс 197, 200 переходит к процессу 234 управления крутящим моментом и процессом 235 управления отношением. Процессы 234, 235 определяют команду актуатора и дроссельной заслонки двигателя, по меньшей мере, частично на основе необходимого крутящего моментами или необходимого отношения соответственно. Процесс 197, 200 переходит к процессам 236, в которых оцениваются текущий режим, скорость транспортного средства и передаточное отношение для определения численности команд из сигналов управления крутящим моментом и отношением, примененных к дроссельной заслонке двигателя и нагрузке актуатора соответственно. Команда актуатора, например, может являться гидравлическим давлением. Поскольку система управления переходит от управления 100% крутящим моментом к управлению 100% отношением, то примененное давление становится суммой взвешенных команд от процессов 236, 237. Результатом является плавный и устойчивый переход между этими различными режимами управления. Процессы 197, 200 переходят к этапу 238, где суммируются численности взвешенных команд. Процесс 197, 200 переходит к этапу 239, где определенные команды актуатора и дроссельной заслонки двигателя применяются к трансмиссии и двигателю. Процесс 197 завершается на этапе 240.
[0071] Ссылаясь теперь на фиг. 10А, в одном варианте осуществления процесс 43 управления отношением начинается с этапа 241 и переходит к этапу 242, где оценивается положение педали газа. Процесс 235 параллельно переходит к этапам 243, 244. На этапе 243 команда дроссельной заслонки двигателя определяется, по меньшей мере, частично на основе оценки на этапе 242. На этапе 244 передаточное отношение определяется, по меньшей мере, частично на основе оценки на этапе 242. Процесс 235 переходит к процессу 246, в котором регулируется актуатор переключения передачи для достижения передаточного отношения, определенного на этапе 244. Процесс 235 переходит от этапа 243 к этапу 245, где процесс управления двигателем применяет команду дроссельной заслонки, определенную на этапе 243. Процесс 235 переходит от этапа 246 к этапу 247, где команда актуатора переключения, определенная на этапе 246, применяется к трансмиссии. Процесс 235 завершается на этапе 248.
[0072] Ссылаясь теперь на фиг. 11, в одном варианте осуществления рабочий процесс 234 может начинаться с этапа 220 и переходить к этапу 221, где получается сигнал, указывающий на положение педали газа. Процесс 234 переходит к этапу 222, где устанавливается число оборотов двигателя. Процесс 200 может параллельно переходить к этапу 224, где определяется необходимый крутящий момент переключения. В одном варианте осуществления этапы 222, 224 включают таблицы преобразования, которые соотносят положение педали к числу оборотов двигателя и крутящему моменту переключения соответственно. В некоторых случаях существует порог положения педали, ниже которого число оборотов двигателя принимается за число оборотов холостого хода. При превышении порога положения педали число оборотов двигателя принимается за условие не холостого состояния. В одном варианте осуществления процесс 234 включает этап 226, где регулируется дроссельная заслонка двигателя для достижения необходимого числа оборотов двигателя, определенного в состояниях 222, 224. Процесс 234 переходит к этапу 224, где процесс 224 управления PID может быть выполнен для установки числа оборотов двигателя на целевое значение. При выполнении процесса 224, процесс 234 переходит к этапу 226, где регулируется положение дроссельной заслонки на основе результата процесса 224. Процесс 224 переходит от этапа 223 к этапу 225, где выполняется процесс актуатора переключения. В некоторых вариантах осуществления усилие, оказанное на положение педали, может определить крутящий момент переключения, который должен быть применен. Процесс актуатора переключения может быть настроен на соединение с соответствующим аппаратным обеспечением трансмиссии для применения крутящего момента к трансмиссии для последующего управления передаточным отношением. Применение вышеупомянутого крутящего момента к трансмиссии может возникнуть на этапе 228. Процесс 234 переходит к конечному этапу 230. Во время осуществления процесса 200 крутящий момент, доставленный на колеса транспортного средства, главным образом регулируется управлением передаточного отношения, в то время как общая мощность регулируется посредством управления числом оборотов двигателя.
|0073] Ссылаясь теперь на фиг. 12, таблица 250 иллюстрирует зацепление узла сцепления привода и узла одностороннего сцепления с соответствующим рабочим режимом. Например, в первой колонке таблицы перечисляются элементы C1, С2, С3 и С4 сцепления. Элементы С1 и С2 сцепления представляют собой элементы сцепления привода, такого как узел сцепления 4 привода двигателя. Элементы С3 и С4 представляют собой элементы узла одностороннего сцепления, такого как узел одностороннего сцепления 6. Колонки таблицы 250, обозначенные как «Режима IVP» и «Режима CVP» заполняются «X» и «О». Запись «X» указывает на зацепление; запись «О» указывает на условие открытия или расцепления. Последняя колонка таблицы 250, обозначенная как «Соединительного компонента» и указывает на деталь водила или кольцо. Например, во время работы режима IVP элементы С1 и С3 сцепления зацепляются с деталью водила и кольцом трансмиссии соответственно, в то время как элементы С2 и С4 сцепления открываются или расцепляются. Во время работы режима CVP элементы С2 и С4 сцепления зацепляются с кольцом и деталью водила соответственно, в то время как элементы С1 и С3 сцепления открываются или расцепляются. Во время работы трансмиссии, будь то в режиме IVP или режиме CVP, элементы С3, С4 одностороннего сцепления могут быть всегда активны или зацеплены. В любом режиме элементы С3, С4 одностороннего сцепления являются активными по меньшей мере во время процессов перехода между режимами, таких как от этапа 132 к этапу 140. Элементы одностороннего сцепления также блокируются в последнем состоянии перехода, например, на этапе 138. Блокировка этапа 138 осуществляется, если «X» применяется для блокировки элемента С4 одностороннего сцепления, как показано в таблице 250, таким образом, завершая переход к режиму CVP.
[0074] Обращаясь теперь к фиг. 13-17, будут описаны варианты осуществления прогрессивных трансмиссий, которые имеют систему управления потоком мощности. Следует отметить, что форма и очертание конкретных компонентов трансмиссии, раскрытых в данной заявке, могут быть выбраны конструктором для достижения необходимой функции и соответствия любому количеству встречающихся конструктивных ограничений. Варианты осуществления, описанные на фиг. 13-17, являются пояснительными примерами архитектур трансмиссии. В некоторых вариантах осуществления односторонние сцепления предоставляют специфическое соединение между кольцом, действующего за счет сцепления, и деталями водила для основания. В каждом из случаев они предотвращают обратное вращение относительно основания, например, картера трансмиссии. Обратное вращение описывается в качестве противоположного вращению вала привода, скажет от двигателя или мотора. Одностороннее действие всегда активно. В качестве альтернативы, обратное вращение может быть предотвращено посредством активного управления традиционным гидравлическим или сухим сцеплением (как проиллюстрировано на фиг. 15-17). Одностороннее сцепление предоставляет мгновенное механическое ограничение против обратного движения во время переключения режима. Это облегчает реализацию элементов управления. После установки рабочего режима правое вращение должно быть дополнительно ограничено на одностороннем сцеплении, следовательно, ограничивая оба направления вращения. Это необходимо для передачи приводом крутящего момента при обратной передаче нагрузки и реализуется в блоках управления «односторонней блокировки команды», изображенных на фиг. 4-9. Одним вариантом осуществления является зацепление промежуточного ползунка или собачки между картером и зацепленным кольцом, действующего за счет сцепления, или деталью водила. Во время изменения режима ни один из промежуточных ползунков не зацепляется. Последним этапом любого изменения режима является «блокировка команды» соответствующей одной стороны.
[0075] Ссылаясь теперь конкретно на фиг. 13, в одном варианте осуществления трансмиссия 300 снабжается главным валом привода 302, размещенным вдоль продольной оси. Трансмиссия 300 включает первую и вторую детали 304, 306 водила. Главный вал 302 привода приспособлен для получения входного крутящего момента. Вторая деталь 306 водила функционально соединяется с узлом актуатора 308 переключения. Узел актуатора 308 переключения настраивается на предоставление относительного вращения между первой и второй деталями 304, 306 водила для последующего изменения передаточного отношения трансмиссии 300. Трансмиссия 300 включает первое и второе тяговые кольца 309, 310. Первой кольцо 310, действующее за счет сцепления, функционально соединяется с кольцевым ведущим элементом 312. В одном варианте осуществления главный вал 302 привода соединяется с узлом сцепления 314 привода. Узел сцепления 314 привода включает элемент 314А соединения кольца, и элемент 314В соединения водила. Элемент 314А соединения кольца настраивается на выборочное соединение с кольцевым ведущим элементом 312. Элемент 314В соединения водила настраивается на выборочное соединение с первой деталью 304 водила. В некоторых вариантах осуществления узел сцепления 314 привода может являться гидравлическим сцеплением. В других вариантах осуществления узел сцепления 314 привода может являться кулачковым сцеплением, которое приспособлено для зацепления при условии нулевой скорости. В очередных вариантах осуществления узел сцепления 314 привода может являться односторонним кулачковым сцеплением.
[0076] Все еще ссылаясь на фиг. 13, трансмиссия 300 включает узел одностороннего сцепления 316. Узел одностороннего сцепления 316 имеет элементы 316А, 316В сцепления, соединенные с кольцевым ведущим элементом 312 и первой деталью 304 водила соответственно. Узел одностороннего сцепления 316 соединяется с деталью основания, такой как картер 320 трансмиссии. В одном варианте осуществления узел одностороннего сцепления 316 и узел сцепления 314 привода размещаются на входной стороне трансмиссии 300. Узел актуатора 308 переключения может быть размещен на выходной стороне трансмиссии 300. Трансмиссия 300 включает первый и второй осевые подпятники 322, 324. Первый осевой подпятник 322 соединяется с главным валом 302 привода и кольцевым ведущим элементом 312. Второй осевой подпятник 324 соединяется с главным валом 302 привода и выходным валом 326.
[0077] Обращаясь теперь к фиг. 14, в одном варианте осуществления трансмиссия 330 может быть настроена на включение системы управления потоком мощности, которая включает первое и второе сцепления 332, 334 привода и первое и второе односторонние сцепления 336, 338. Для упрощения будут описаны лишь отличия между трансмиссией 330 и трансмиссией 300. Следует отметить, что форма и очертание конкретных компонентов трансмиссии, раскрытых в данной заявке, могут быть выбраны конструктором для достижения необходимой функции и соответствия любому количеству встречающихся конструктивных ограничений. В одном варианте осуществления трансмиссия 330 снабжается пружиной 340, соединенной с первой деталью 304 водила. Пружина 340 приспособлена для установки первой детали 304 водила в предопределенном положении для достижения необходимого передаточного отношения для выключенного условия. В одном варианте осуществления первое и второе сцепления 332, 334 привода и первое одностороннее сцепление 336 размещаются на входной стороне трансмиссии 330. Первое одностороннее сцепление 336 выборочно соединяется с кольцевым ведущим элементом 312 и картером 320. Второе одностороннее сцепление 338 размещается на выходной стороне трансмиссии. Второе одностороннее сцепление 338 выборочно соединяется с первой деталью 304 водила и картером 320. В некоторых вариантах осуществления узел актуатора 308 переключения размещается на выходной стороне трансмиссии 330.
[0078] Ссылаясь теперь на фиг. 15, трансмиссия 350 может быть настроена на включение системы управления потоком мощности, которая включает первое и второе сцепления 332, 334 привода и первое и второе односторонние сцепления 336, 338. Для упрощения будут описаны лишь отличия между трансмиссией 350 и трансмиссией 300. В одном варианте осуществления трансмиссия 350 снабжается первым и вторым сцеплениями 352, 354 привода. Первое сцепление 352 привода может быть размещено на выходной стороне трансмиссии 350. Первое сцепление 352 привода выборочно соединяется со второй деталью 306 водила и главным валом 302. Второе сцепление 354 привода размещается на входной стороне трансмиссии 350. Второе сцепление 354 привода выборочно соединяется с кольцевым ведущим элементом 312. В одном варианте осуществления трансмиссия 350 имеет первое и второе односторонние сцепления 356, 356. Первое одностороннее сцепление 356 размещается на входной стороне трансмиссии и может быть объединено со вторым сцеплением 354 привода. Первое одностороннее сцепление выборочно соединяется с кольцевым ведущим элементом 312 и картером 320. Второе одностороннее сцепление 358 выборочно соединяется со второй деталью 306 водила и картером 320.
[0079] Обращаясь теперь к фиг. 16, в одном варианте осуществления трансмиссия 360 может быть настроена на включение гидравлического механизма 362 переключения, снабженного осевым преобразующим гидравлическим поршнем 363, функционально соединенным со второй деталью 306 водила. Трансмиссия 360 может быть снабжена системой управления потоком мощности, которая включает первое и второе сцепления 364, 366 привода и первое и второе односторонние сцепления 368, 369. В одном варианте осуществления первое сцепление 364 привода выборочно соединяется с первой деталью 304 водила и главным валом 302 привода. Второе сцепление 366 привода выборочно соединяется с кольцевым ведущим элементом 312 и главным валом 302 привода. Первое одностороннее сцепление 368 выборочно соединяется с кольцевым ведущим элементом 312 и картером 320. Первое одностороннее сцепление 369 выборочно соединяется с первой деталью 304 водила и картером 320.
[0080] Ссылаясь теперь на фиг. 17, в одном варианте осуществления трансмиссия 370 может быть снабжена системой управления потоком мощности, которая включает первое и второе сцепления 372, 374 привода и первое и второе односторонние сцепления 376, 378. В одном варианте осуществления трансмиссия 370 снабжается подпятником 380, соединенным с кольцевым ведущим элементом 312 и соединением 381. Соединение 381 функционально соединяется с кулачком 382 выходной нагрузки и выходным валом 312. Подпятник 380 настраивается на противодействие осевым силам, генерируемым во время работы трансмиссии 370. В некоторых вариантах осуществления выходной вал 312 соединяется с выходной зубчатой передачей 384. В одном варианте осуществления первое сцепление 372 привода настраивается на выборочное соединение входного вала 385 привода с первой деталью 304 водила. Второе сцепление 374 привода приспособлено для выборочного соединения входного вала 385 привода с кольцевым ведущим элементом 312. Первое одностороннее сцепление 376 настраивается на выборочное соединение второй детали 306 водила с картером 320. Второе одностороннее сцепление 378 приспособлено для выборочного соединения кольцевого ведущего элемента 312 с картером 320.
[0081] Переходя теперь к фиг. 18-22, в одном варианте осуществления узел водила 400 может быть использовано совместно с трансмиссией, раскрытой в данной заявке. Узел водила 400 может быть функционально соединено с актуатором 402 переключения. Актуатор 402 переключения может являться мотором или любым устройством, которое может применять крутящий момент к компонентам узла водила 400. В одном варианте осуществления актуатор 402 переключения также снабжается скользящим соединением 401. Скользящее соединение 401 может быть выборочно расположено для зацепления определенных компонентов узла водила 400. Узел водила 400 снабжается узлом преобразователя 404. Узел преобразователя 404 включает деталь 406 преобразования и любое устройство, настроенное на выборочную установку детали 406 преобразования относительно продольной оси. Узел водила 400 включает ряд тарелок 408, 409, 410, 411 водила. Пластины 408, 409, 410, 411 водила приспособлены для поддержки узла сателлита 412 с передачей мощности за счет сцепления. Узел сателлита 412 с передачей мощности за счет сцепления может включать шпиндель 413, соединенный с несколькими роликами 414. Ролики 414 могут соединяться с пластинами 408, 409, 410, 411 водила. В других вариантах осуществления шпиндель 413 может непосредственно соединяться с пластинами 408, 409, 410, 411 водила. Пластины 408, 409 водила размещаются на первом конце шпинделя 413, а пластины 410, 411 водила размещаются на втором конце шпинделя 413. Пластины 408, 409 водила снабжаются рядом круговых шлицов 415, которые приспособлены для получения детали 406 преобразования. Пластины 410, 411 водила снабжаются рядом круговых шлицов 419, которые приспособлены для получения скользящего соединения 401.
[0082] Во время работы трансмиссии управление передаточным отношением достигается посредством относительного вращения деталей водила относительно друг друга, например, вращения детали 409 водила относительно детали 410 водила. В зависимости от рабочего режима трансмиссии трансмиссия будет наблюдать кольцо, действующее за счет сцепления, в прямом или обратном направлении относительно деталей водила. Узел преобразователя 404 и актуатор 402 переключения могут выборочно зацеплять пару деталей водила. Например, детали 409, 410 водила зацепляются, если трансмиссия вращается в прямом направлении, в то время как детали 408, 411 водила зацепляются, если трансмиссия вращается в обратном направлении. Детали 408, 409 водила переключаются между свободным режимом и режимом управления посредством актуатора 402 переключения. При изменении режима между режимом CVT и режимом IVT переключение между деталями водила возникает, если вращения для кольца и деталей водила синхронны. Деталь водила останавливается, если кольцевой ведущий элемент достигает скорости вала привода при преобразовании из режима IVP в режим CVP. Переключение между деталями водила возникает, если кольцевой ведущий элемент и детали водила имеют одинаковую скорость. В некоторых вариантах осуществления деталь 410 водила является радиальным направляющим пазом 417 (фиг. 20) и детали 408, 409 водила выборочно зацепляются для обратного или прямого направления соответственно.
[0083] Обращаясь теперь конкретно к фиг. 20, в одном варианте осуществления пластина 410 водила является практически чашеобразным телом, которое имеет расположенное по центру отверстие 416. Чашеобразное тело может быть снабжено рядом направляющих пазов 417, размещенных под углом вокруг расположенного по центру отверстия 416. Направляющие пазы 417 совпадают с радиальной линией 418 построение при рассмотрении в плоскости страницы, на которой изображена фиг. 20. Направляющие пазы 417 приспособлены для получения одного конца шпинделя 416 сателлита. Чашеобразное тело снабжается выступом 419, сформированным вокруг внешней окружности. Выступ 419 может быть приспособлен для закрепления актуатора 402 переключения.
[0084] Ссылаясь теперь на фиг. 21, в одном варианте осуществления пластина 408 водила является практически чашеобразным телом, которое имеет расположенное по центру отверстие 420. Чашеобразное тело может быть снабжено рядом направляющих пазов 422, размещенных под углом вокруг расположенного по центру отверстия 420. Каждый направляющий паз 422 имеет такой размер, чтобы соответствовать соединению пластины 408 водила со шпинделем 416. Направляющие пазы 422 смещены под углом относительно радиальной линии 424 построения при рассмотрении в плоскости страницы, на которой изображена фиг. 21. Смещение под углом может быть округлено до угла 425. Угол 425 формируется между радиальной линией 424 построения и линией 426 построения. Линия 426 построения практически делит направляющий паз 422 при рассмотрении в плоскости страницы, на которой изображена фиг. 21. В некоторых вариантах осуществления угол 425 находится в диапазоне от 3 градусов до 45 градусов. Значения угла 425 предоставляются в качестве пояснительного примера, и угол 425 может быть любым образом изменен по желанию конструктора. В некоторых вариантах осуществления угол 425 может являться любым углом в диапазоне от 10 до 25 градусов, включая любой угол между этими значениями или в долях от этих значений. Например, угол может составлять 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25 градусов или любую их часть. В других вариантах осуществления угол 425 может составлять 20 градусов. В одном варианте осуществления направляющие пазы 422 могут быть размещены таким образом, чтобы линия 426 построения была радиально смещена относительно линии 427 построения на некоторое расстояние 428. Линия 428 построения параллельна линии 427 построения и пересекает центр чашеобразного тела.
[0085] Ссылаясь на фиг. 22, в одном варианте осуществления пластина 409 водила является практически чашеобразным телом, которое имеет расположенное по центру отверстие 430. Чашеобразное тело может быть снабжено рядом направляющих пазов 432, размещенных под углом вокруг расположенного по центру отверстия 430. Каждый направляющий паз 432 имеет такой размер, чтобы соответствовать соединению пластины 408 водила со шпинделем 416. Направляющие пазы 432 смещены под углом относительно радиальной линии 434 построения при рассмотрении в плоскости страницы, на которой изображена фиг. 22. Смещение под углом может быть округлено до угла 435. Угол 435 формируется между радиальной линией 434 построения и линией 436 построения. Линия 436 построения практически делит направляющий паз 432 при рассмотрении в плоскости страницы, на которой изображена фиг. 22. В некоторых вариантах осуществления угол 435 находится в диапазоне от 3 градусов до 45 градусов. Значения угла 435 предоставляются в качестве пояснительного примера, и угол 435 может быть любым образом изменен по желанию конструктора. В некоторых вариантах осуществления угол 435 может являться любым углом в диапазоне от (-)10 до (-)25 градусов, включая любой угол между этими значениями или в долях от этих значений. «(-)» указывает на отрицательное значение относительно линии 434 построения в отличие положительных значений для угла 425 относительно линии 424 построения. Например, угол может составлять (-)10, (-)11, (-)12, (-)13, (-)14, (-)15, (-)16, (-)17, (-)18, (-)19, (-)20, (-)21, (-)22, (-)23, (-)24, (-)25 градусов или любую их часть. В других вариантах осуществления угол 435 может составлять 20 градусов. В одном варианте осуществления направляющие пазы 432 могут быть размещены таким образом, чтобы линия 436 построения была радиально смещена относительно линии 437 построения на некоторое расстояние 438. Линия 438 построения параллельна линии 437 построения и пересекает центр чашеобразного тела.
[0086] Следует отметить, что пластина 411 водила может являться практически такой же, как пластина 408 водила, если пластина 410 водила настраивается на включение смещенных под углом пазов 434, как изображено на фиг. 22. При формировании пластины 410 водила посредством радиальных пазов 417 узел водила 400 может не включать пластину 411 водила.
[0087] Специалистам в данной области техники будет понятно, что различные логические блоки, модули, схемы и этапы алгоритма, описанные по отношению к вариантам осуществления, раскрытым в данной заявке, включая ссылку на систему управления трансмиссией, описанную в данной заявке, например, могут быть реализованы в качестве электронного аппаратного обеспечения, программного обеспечения, сохраненного на машиночитаемом носителе и выполняемого посредством процессора, или их комбинации. Для четкого пояснения этой взаимозаменяемости аппаратного и программного обеспечения различные пояснительные компоненты, блоки, модули, схемы и этапы были в целом описаны выше в контексте их функциональности. Реализация такой функциональности в качестве аппаратного или программного обеспечения зависит от конкретного приложения и конструктивных ограничений, которые налагаются всей системой. Специалисты в данной области техники могут реализовать описанную функциональность различными способами для каждого приложения, но такие реализационные решения не должны интерпретироваться в качестве отступления от объема настоящего изобретения. Например, различные пояснительные логические блоки, модули, и схемы, описанные по отношению к вариантам осуществления, раскрытым в данной заявке, могут быть реализованы или выполнены посредством процессора общего назначения, процессора (DSP) цифровых сигналов, специализированной интегральной схемы (ASIC), программируемой пользователем логической матрицы (FPGA) или другого программируемого логического устройства, схемы на дискретных компонентах или транзиторной логической схемы, дискретных компонентов аппаратного обеспечения или любого их сочетания, спроектированного для выполнения функций, описанных в данной заявке. Процессор общего назначения может являться микропроцессором, но в качестве альтернативы процессор может являться любым традиционным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор может быть также реализован в качестве сочетания вычислительных устройств, например, сочетания DSP и микропроцессора, нескольких микропроцессоров, одного или нескольких микропроцессоров в сочетании с ядром DSP, или любой другой такой конфигурации. Программное обеспечение, связанное с такими модулями, может находиться в оперативном запоминающем устройстве, флэш-памяти, постоянном запоминающем устройстве, стираемом программируемом постоянном запоминающем устройстве, реестрах, жестком диске, съемном диске, компакт-диске или любом другом носителе данных подходящей формы, известном из уровня техники. Показательный носитель данных соединяется с процессором, таким как процессор, который может считывать информацию с и записывать информацию на носитель данных. В качестве альтернативы носитель данных может быть объединен с процессором. Процессор и носитель данных могут находиться в ASIC. Например, в одном варианте осуществления контроллер для использования управления IVT 1 включает процессор (не показанный).
[0088] Вышеизложенное описание подробно описывает определенные варианты осуществления изобретения. Однако следует понимать, что не важно, насколько подробно вышеизложенное описывается в тексте, варианты осуществления могут быть применены на практике различными способами. Как также указано выше, следует отметить, что использование конкретной терминологии во время описания определенных особенностей или аспектов изобретения не должно восприниматься в качестве предположения того, что повторное определение терминологии запрещается, включая любые специфические характеристики особенностей или аспектов изобретения, с которыми связана эта терминология.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2483234C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2009 |
|
RU2483235C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2498132C2 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ | 2008 |
|
RU2465497C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ДЛЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2016 |
|
RU2712713C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2490533C2 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ДЛЯ БЕССТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2011 |
|
RU2584635C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2505727C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕСCТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2503864C1 |
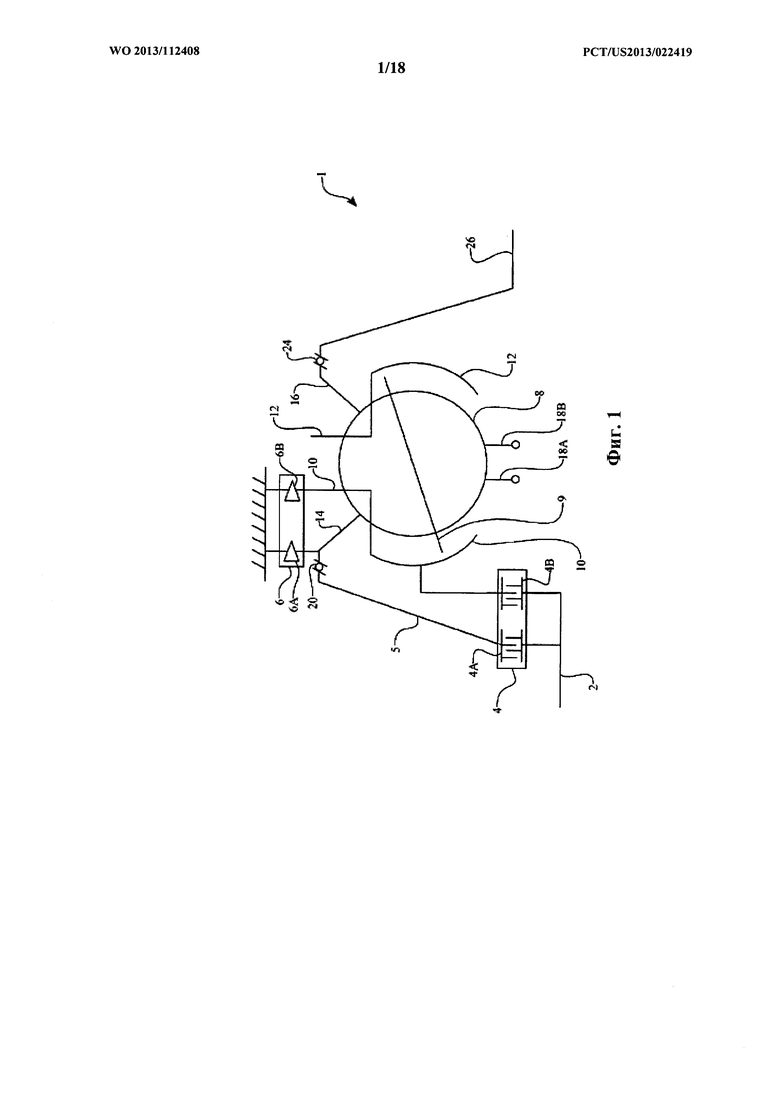
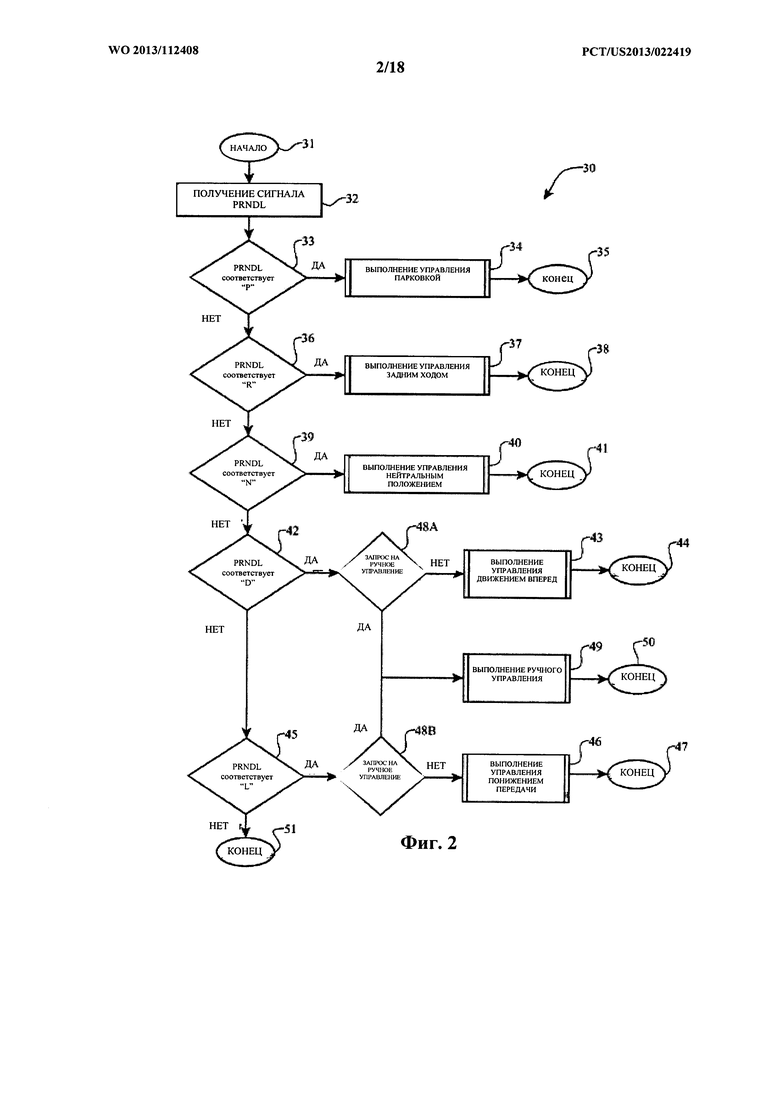
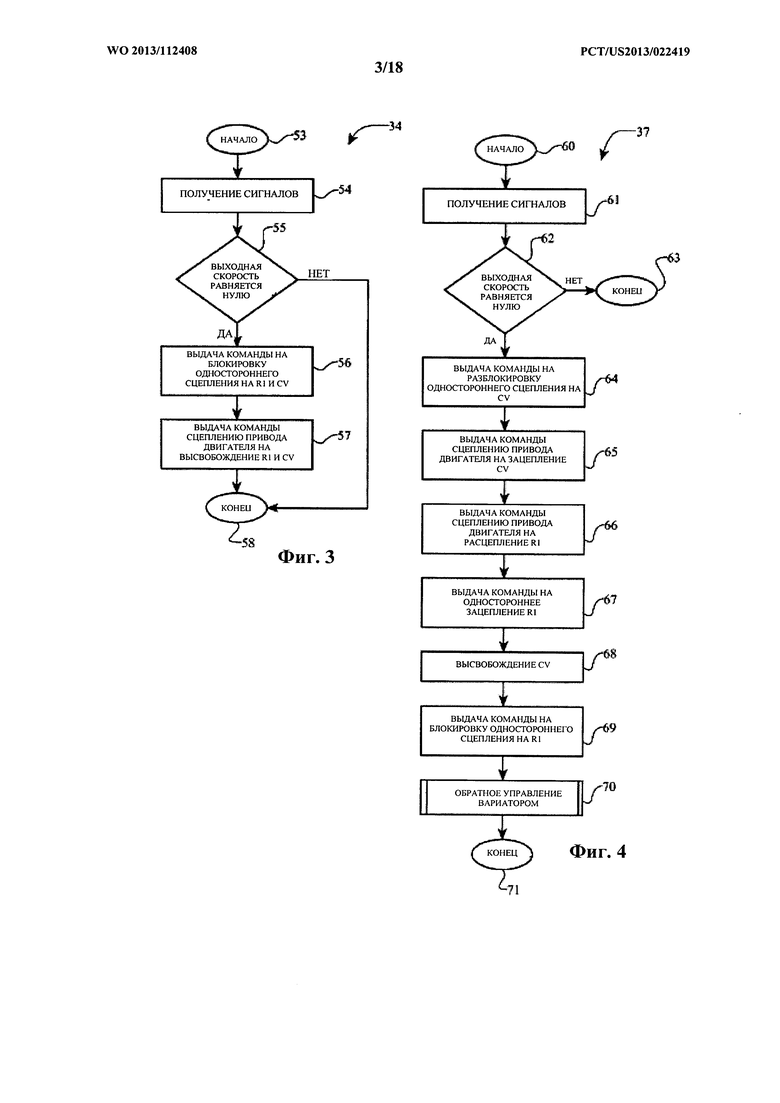
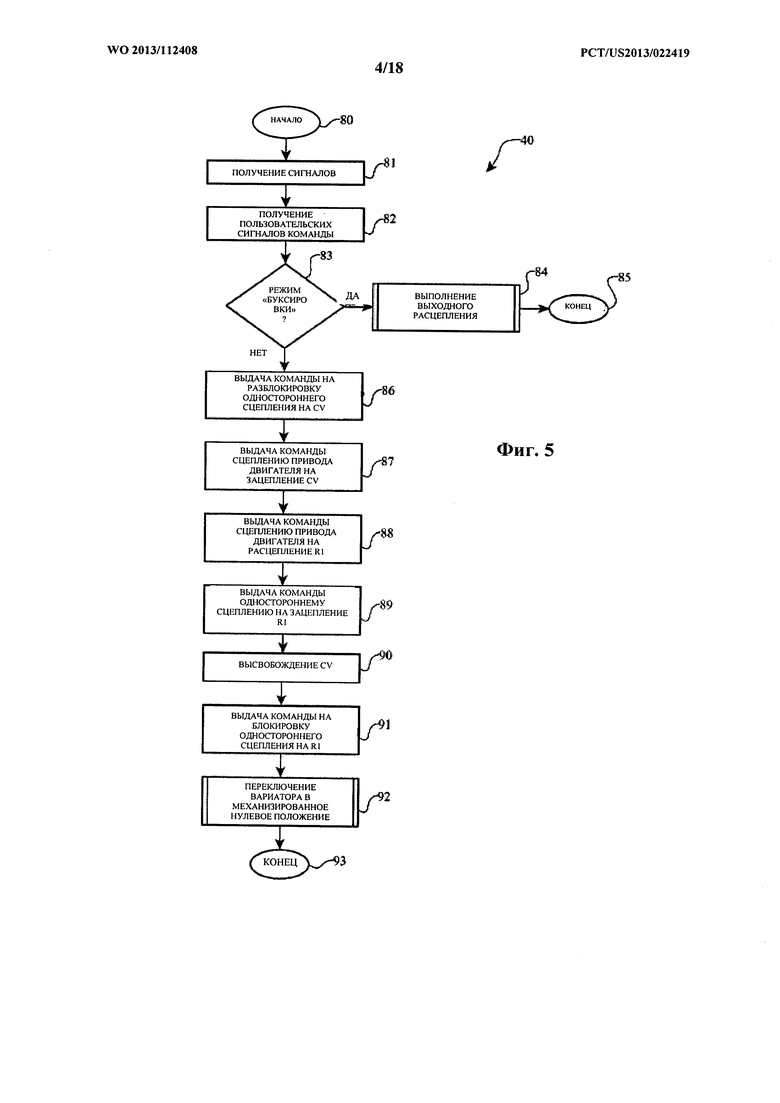
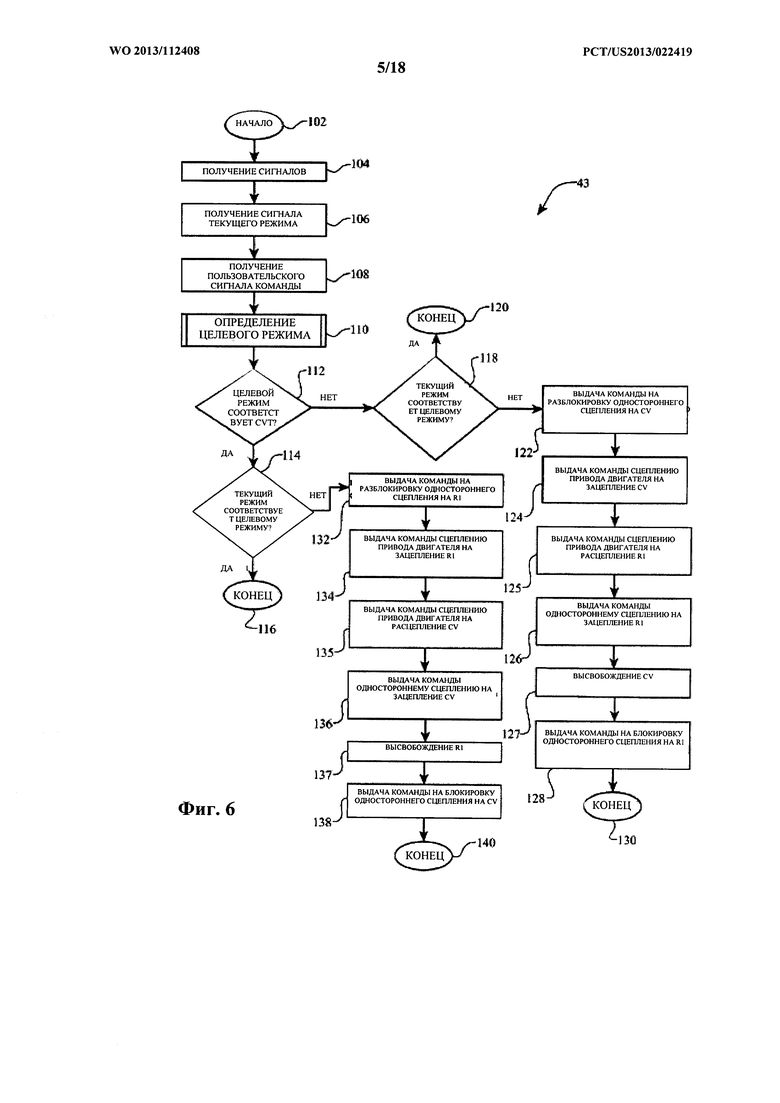
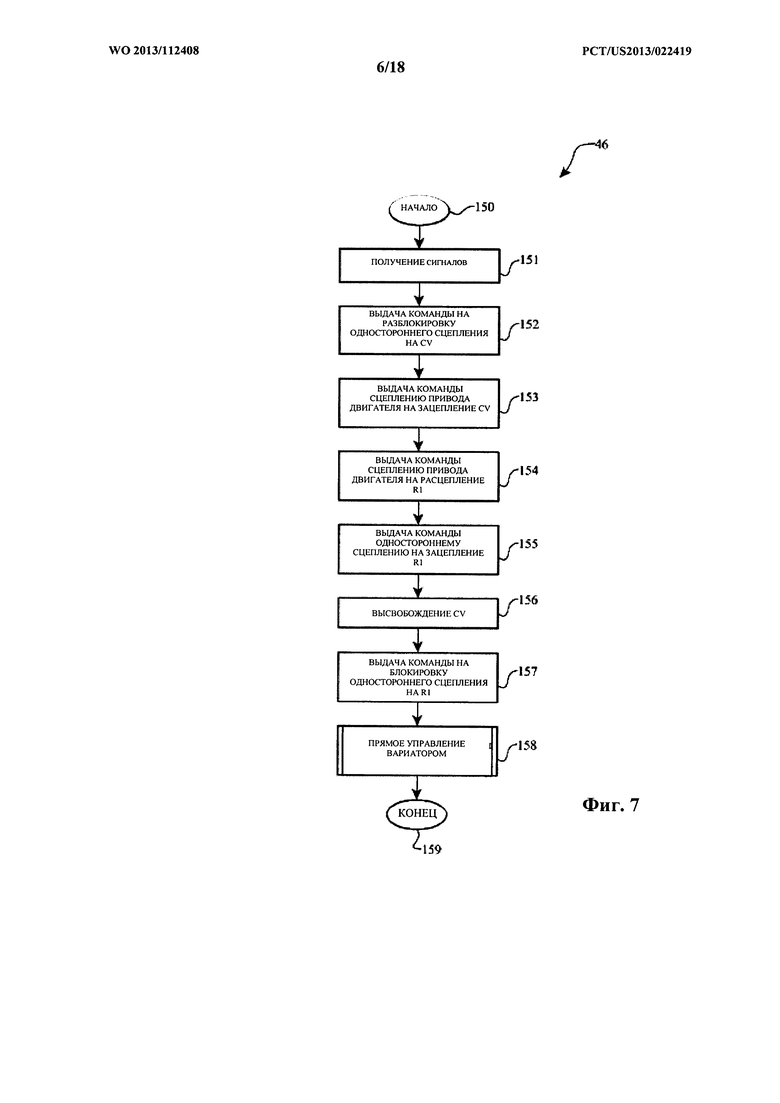
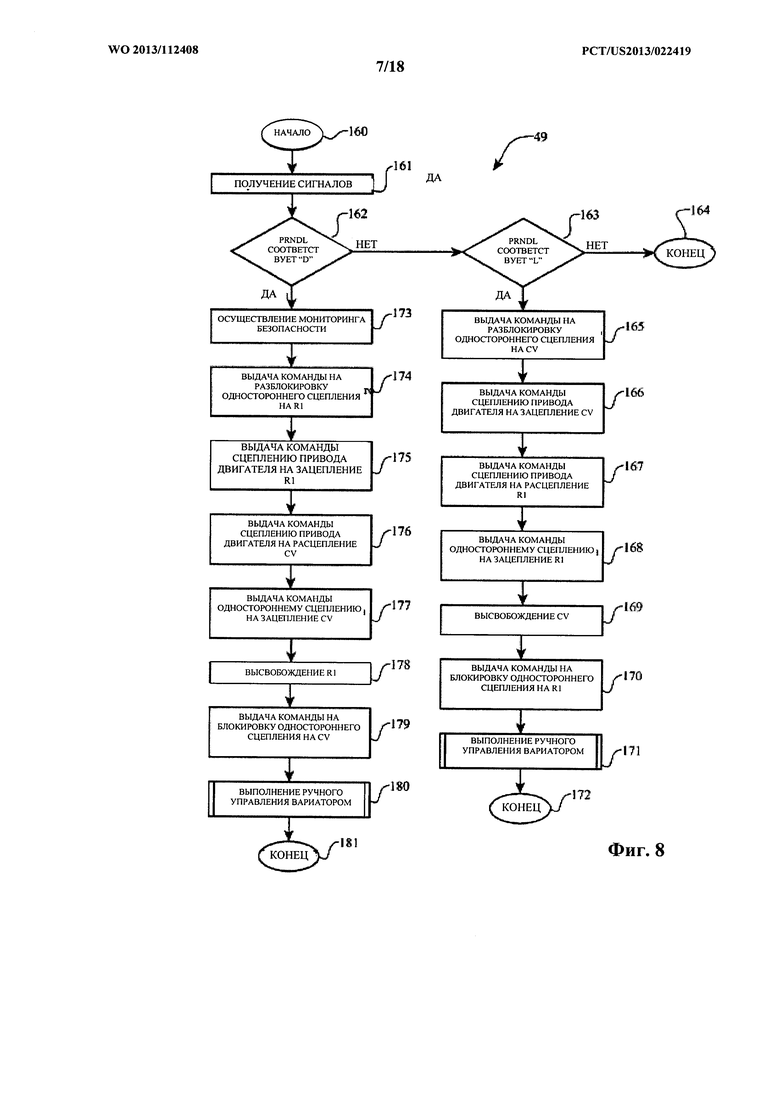
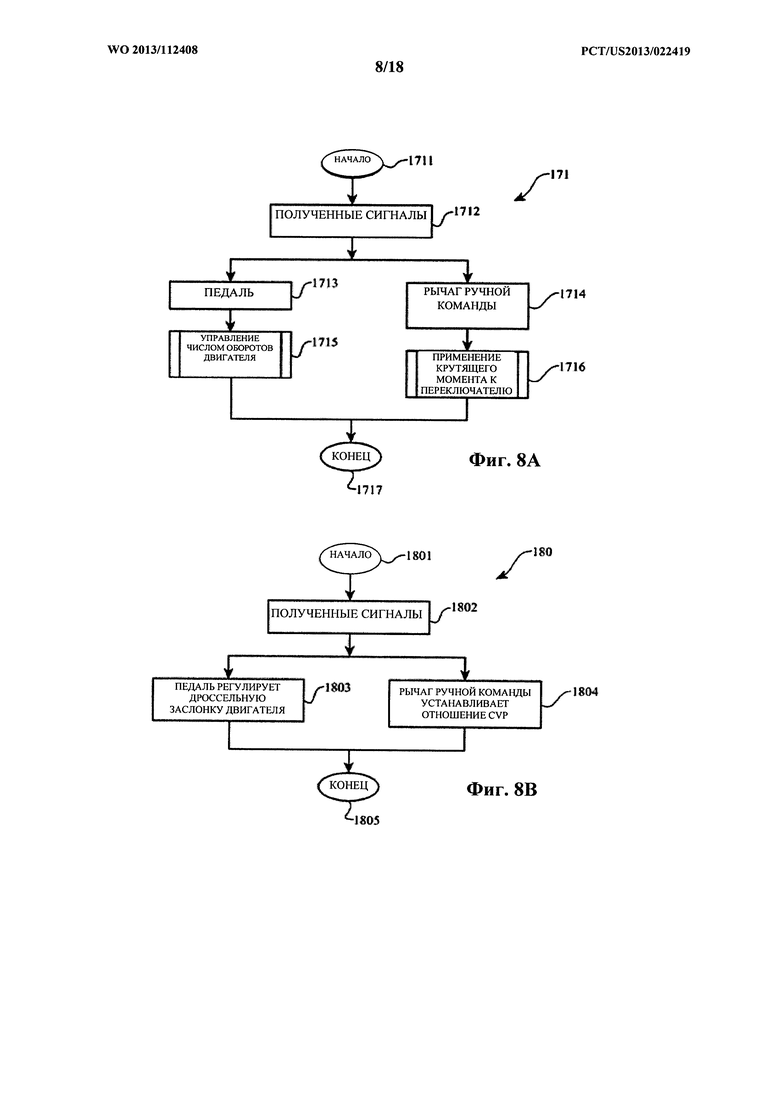
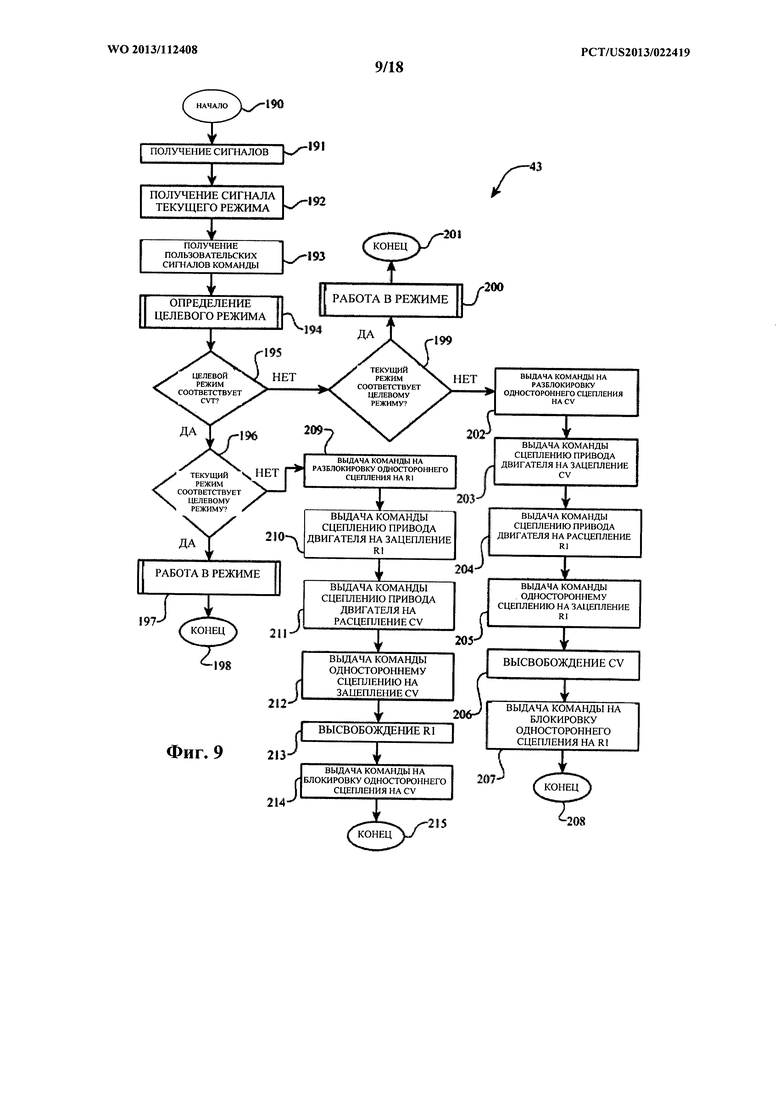
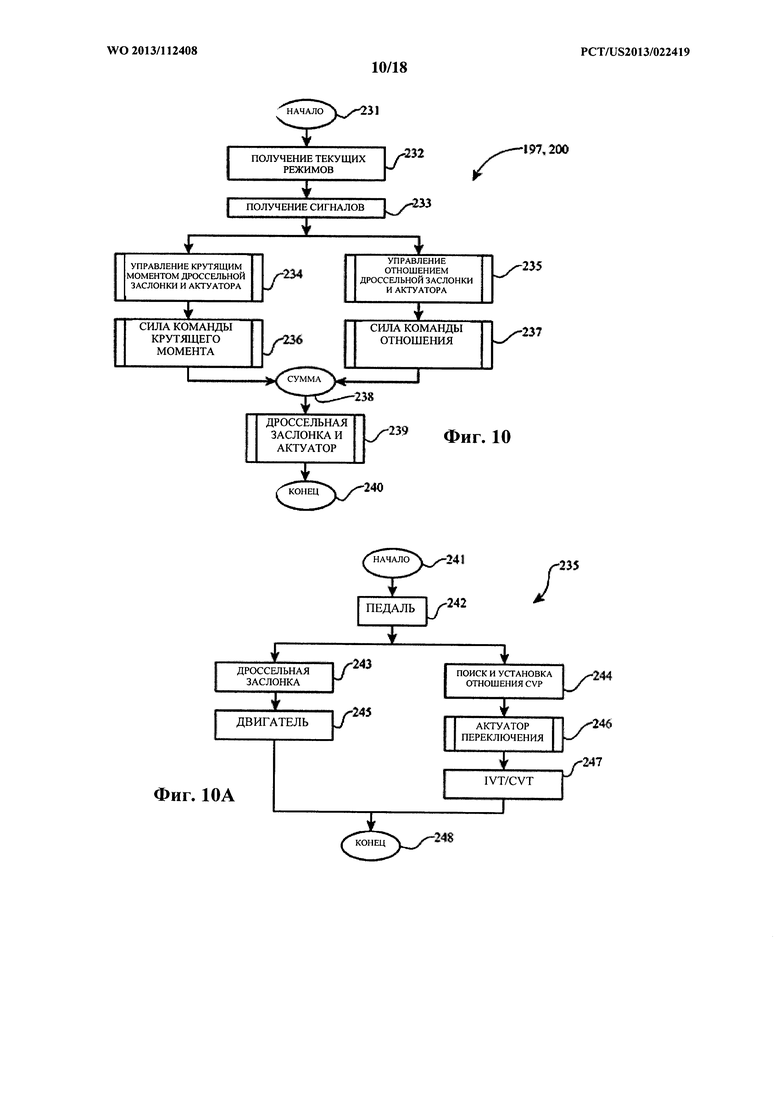
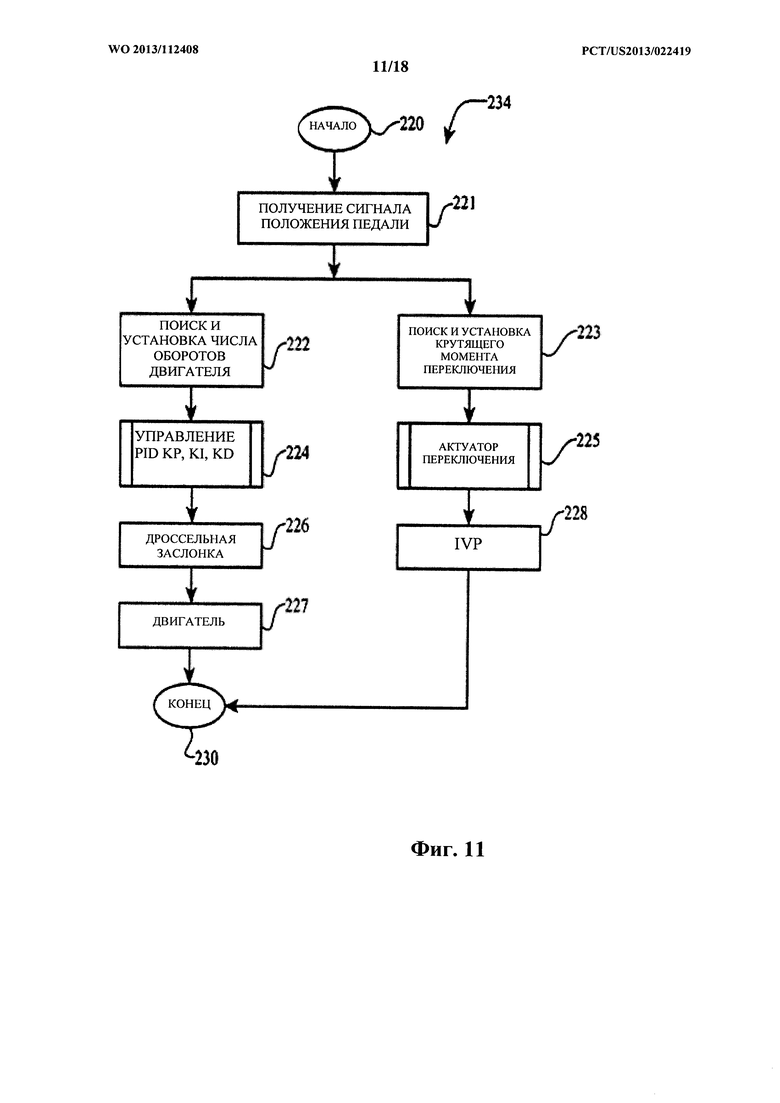
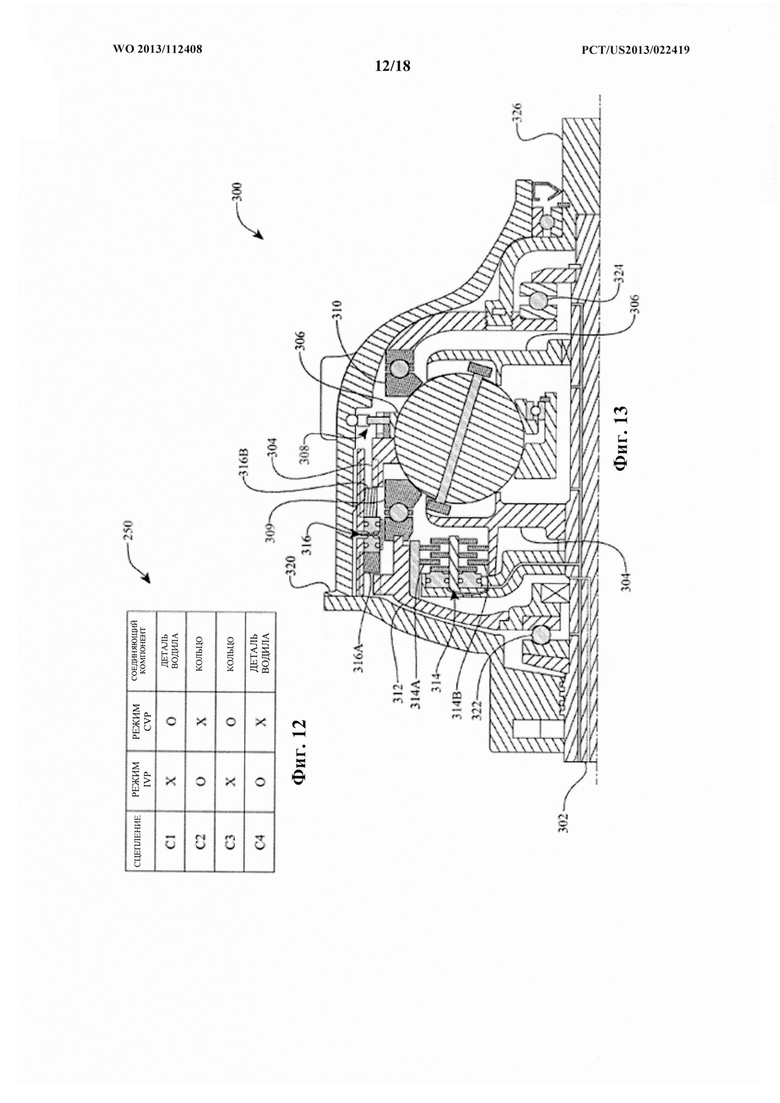
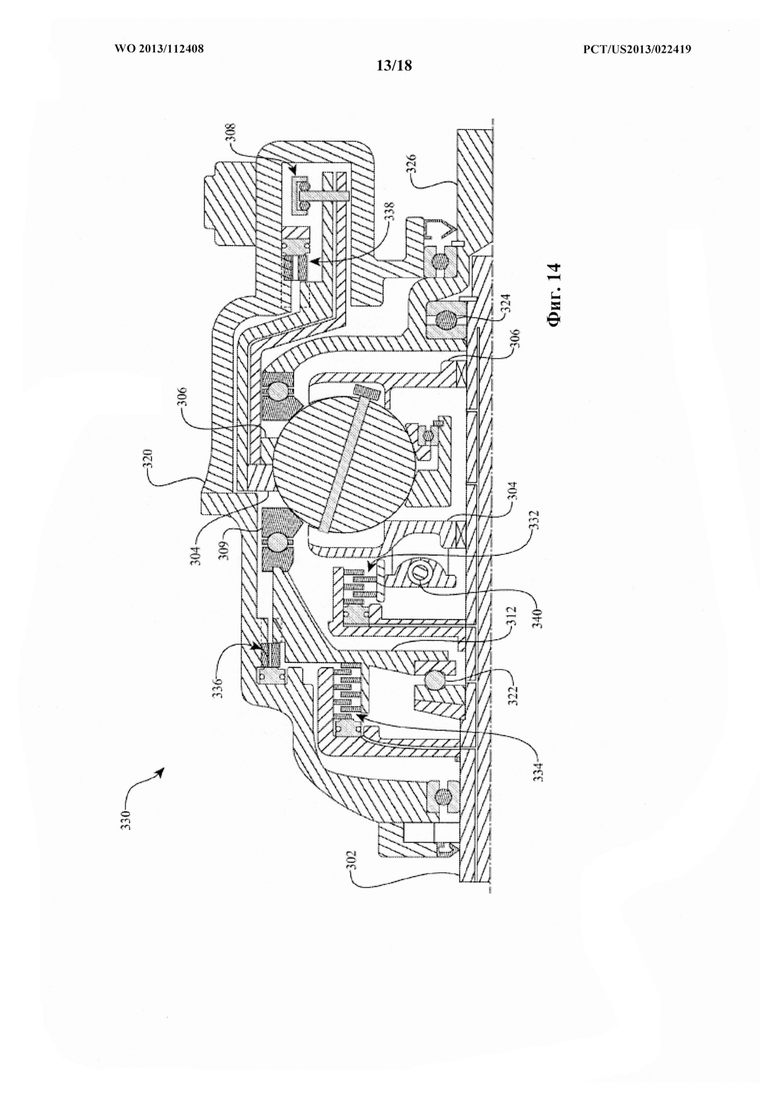
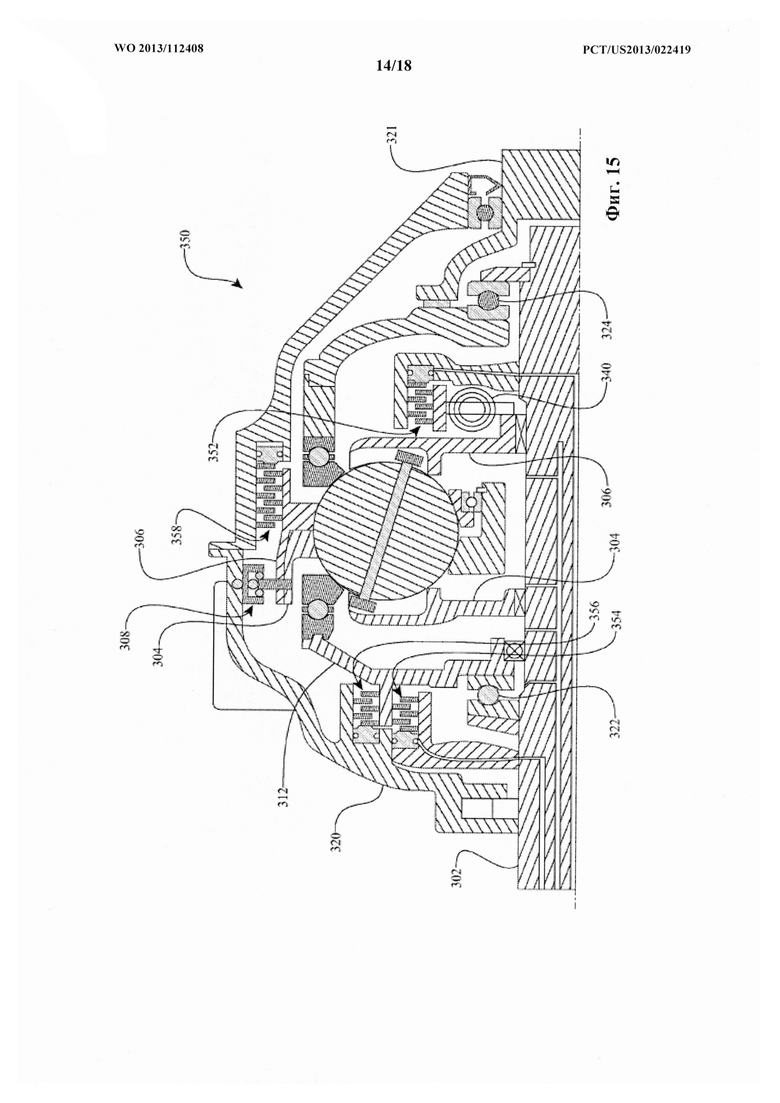
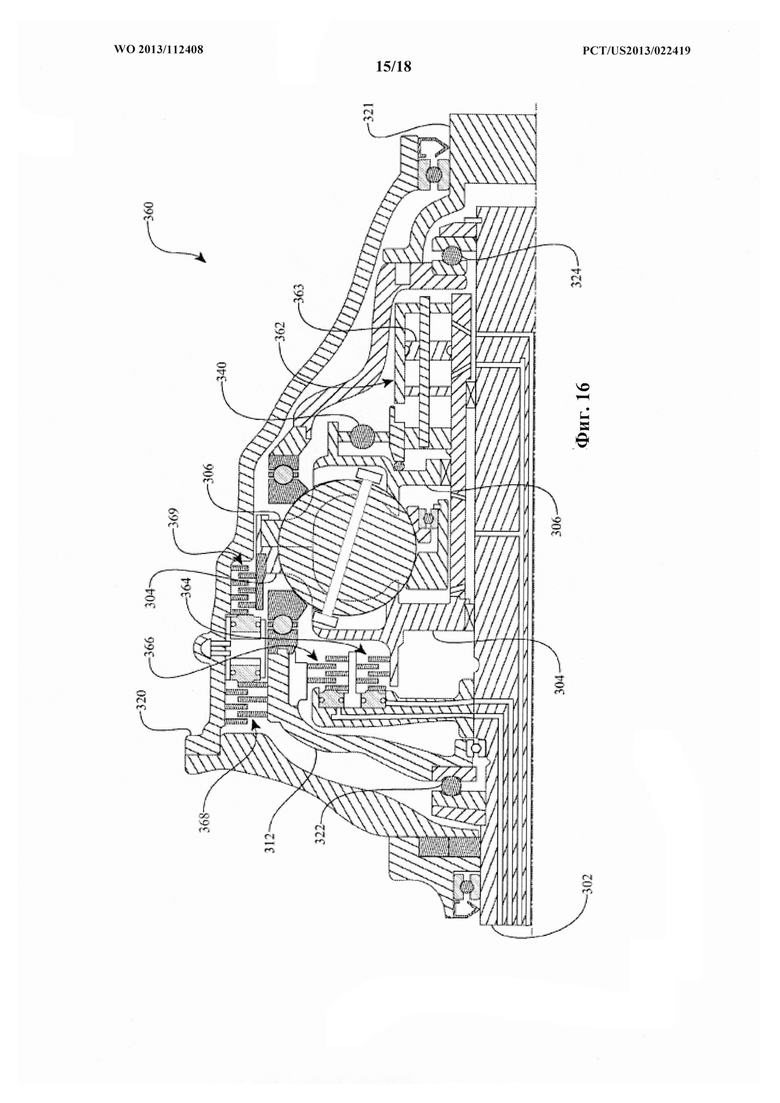
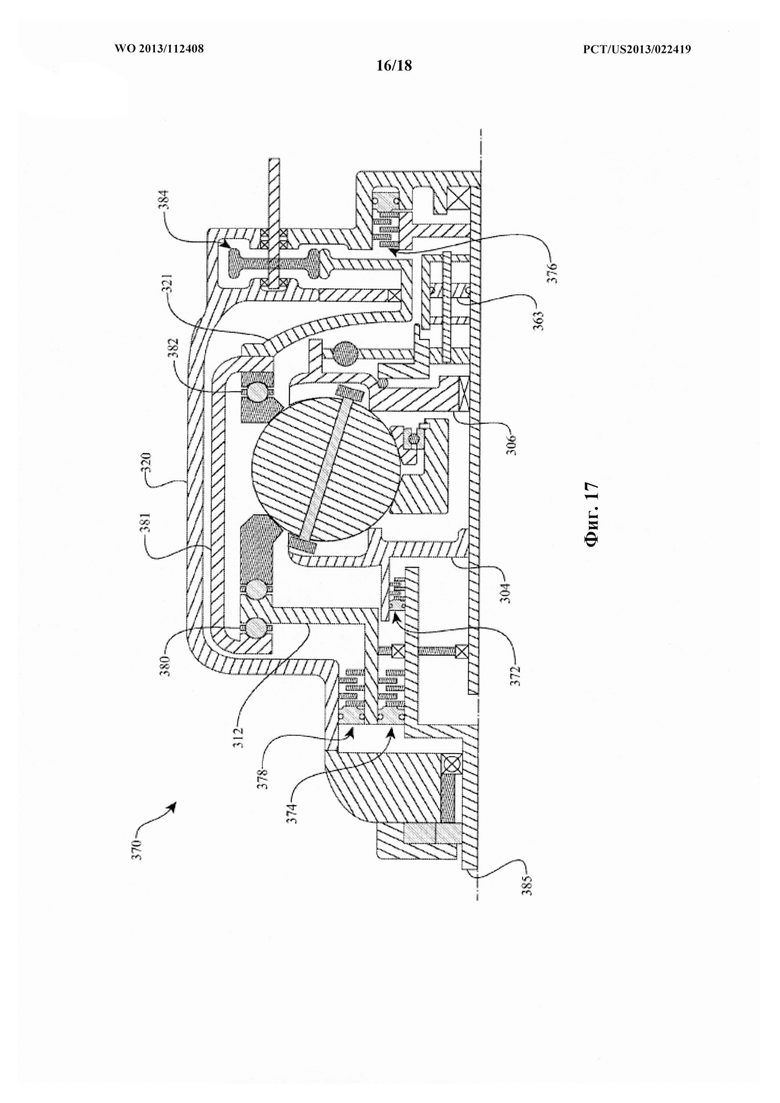
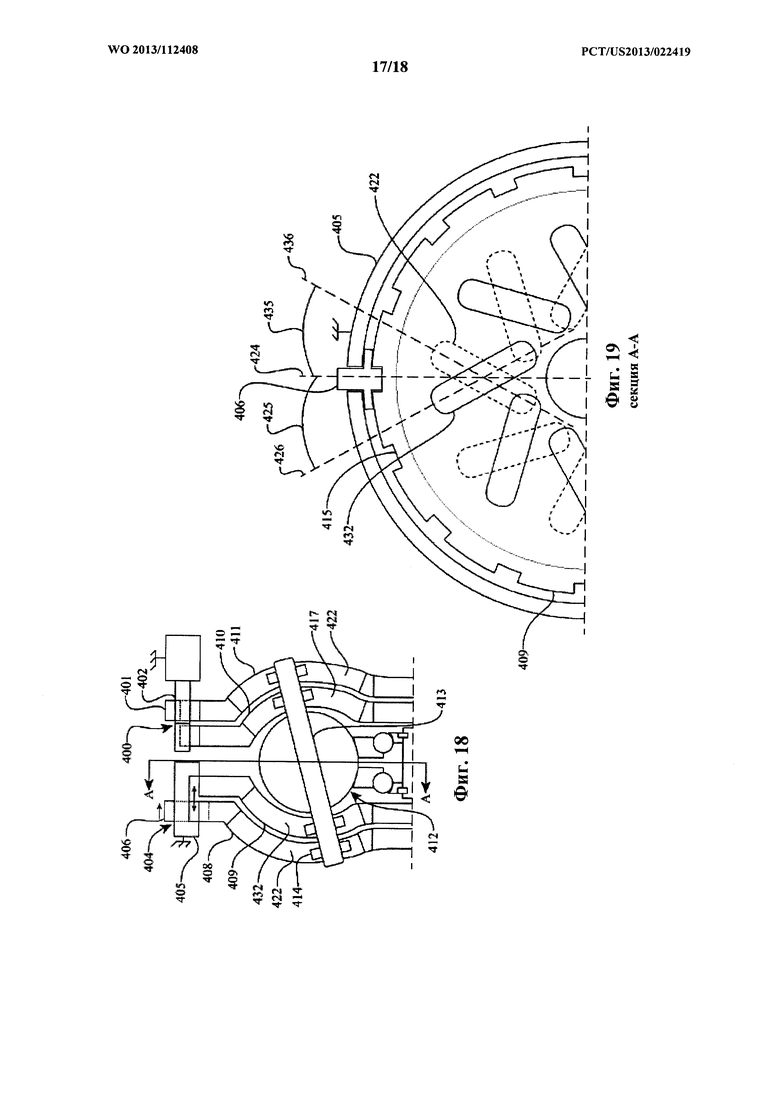
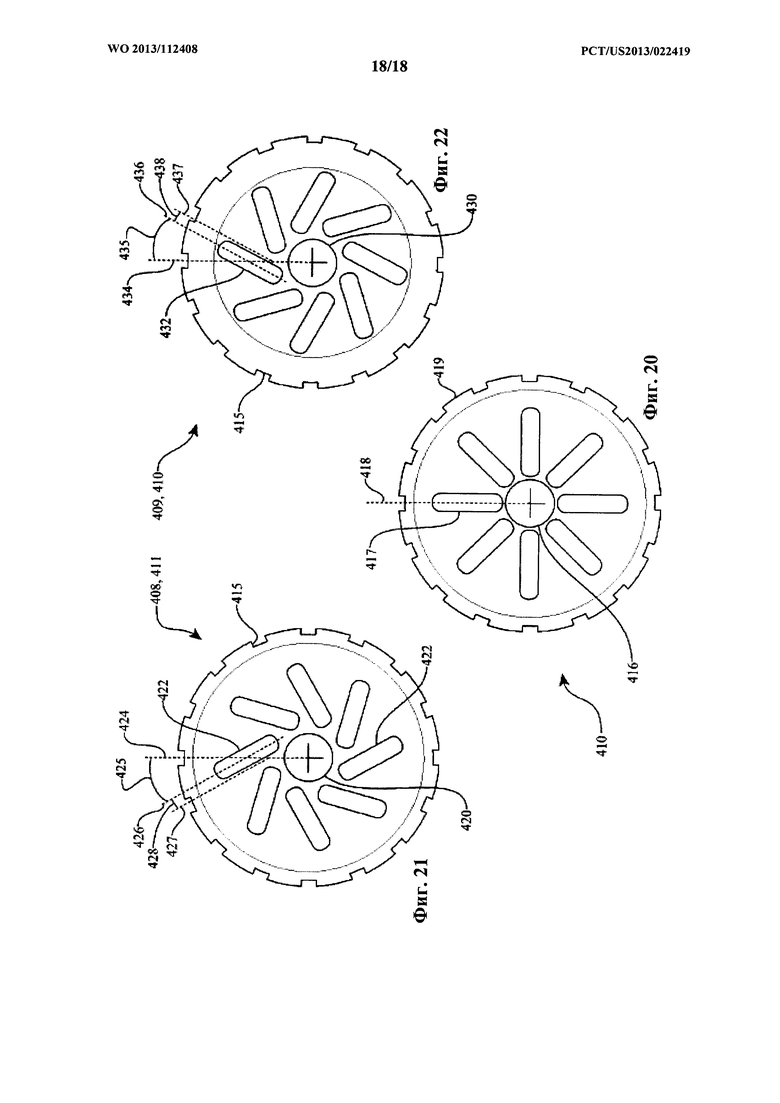
Изобретение относится к бесступенчатым трансмиссиям и способу управления. Трансмиссия содержит первый диск, несколько наклоняемых шаров, расположенных под углом вокруг продольной оси и соприкасающихся с первым диском; второй диск, соприкасающийся с несколькими наклоняемыми шарами; ролик, радиально расположенный внутри наклоняемых шаров и соприкасающийся с ними, клетку, соединенную с несколькими шарами. Также содержит первое сцепление в сборе, соединенное с клеткой и первым диском, второе сцепление в сборе, соединенное с клеткой и первым диском. Два из следующего: первый диск, второй диск, ролик и клетка приспособлены для получения входной мощности. При этом одно из следующего: первый диск, второй диск, ролик и клетка приспособлено для предоставления выходной мощности. Достигается упрощение конструкции, снижение стоимости и размера устройства. 3 н. и 14 з.п. ф-лы, 22 ил.
.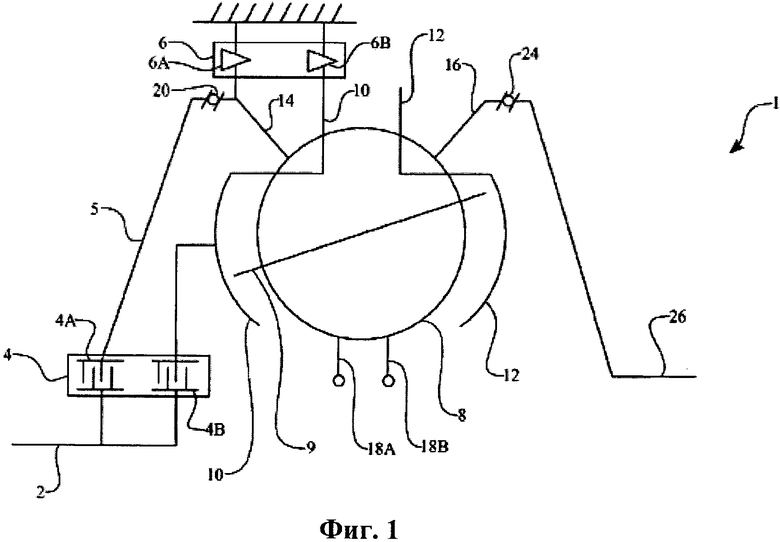
1. Трансмиссия, содержащая:
первый диск, коаксиально установленный вокруг продольной оси трансмиссии;
несколько наклоняемых шаров, расположенных под углом вокруг продольной оси и соприкасающихся с первым диском; второй диск, коаксиально установленный вокруг продольной оси трансмиссии и соприкасающийся с несколькими наклоняемыми шарами; ролик, радиально расположенный внутри наклоняемых шаров и соприкасающийся с ними; клетку, операционно соединенную с несколькими шарами; первое сцепление в сборе, операционно соединенное с клеткой и первым диском; второе сцепление в сборе, операционно соединенное с клеткой и первым диском; при этом по меньшей мере два из следующего: первый диск, второй диск, ролик и клетка приспособлены для получения входной мощности; и
при этом по меньшей мере одно из следующего: первый диск, второй диск, ролик и клетка приспособлено для предоставления выходной мощности.
2. Трансмиссия по п.1, отличающаяся тем, что ролик приспособлен для свободного вращения без передачи мощности.
3. Трансмиссия по п.1, отличающаяся тем, что первый диск и клетка приспособлены для получения входной мощности.
4. Трансмиссия по п.1, отличающаяся тем, что первое сцепление в сборе операционно соединено с источником мощности, при этом второе сцепление операционно соединено с деталью основания и, при этом первое и второе сцепления могут быть активированы для предоставления входной мощности на трансмиссию.
5. Трансмиссия по п.1, отличающаяся тем, что первое сцепление в сборе содержит гидравлическое сцепление.
6. Трансмиссия по п.1, отличающаяся тем, что второе сцепление в сборе содержит одностороннее сцепление.
7. Способ управления трансмиссией с изменяемым передаточным отношением, содержащей несколько наклоняемых шаров, соприкасающихся с первым тяговым кольцом и клеткой, при этом способ включает:
получение нескольких сигналов;
определение целевого рабочего режима;
определение сигнала команды для одностороннего сцепления в сборе;
определение сигнала команды для сцепления привода в сборе; и
выборочное зацепление одностороннего сцепления в сборе с первым тяговым кольцом и клеткой, по меньшей мере, частично на основе сигнала команды для одностороннего сцепления в сборе.
8. Способ по п. 7, отличающийся тем, что дополнительно включает этап выборочного зацепления сцепления привода в сборе с первым тяговым кольцом и клеткой, по меньшей мере, частично на основе сигнала команды для сцепления привода в сборе.
9. Способ по п. 7, отличающийся тем, что определение сигнала команды для одностороннего сцепления в сборе включает этап сравнения целевого рабочего режима и пользовательского сигнала команды.
10. Способ по п. 9, отличающийся тем, что пользовательский сигнал команды включает сигнал положения дроссельной заслонки.
11. Способ по п. 9, отличающийся тем, что пользовательский сигнал команды включает сигнал положения рычага управления или сигнал положения PRNDL.
12. Способ по п. 7, отличающийся тем, что выборочное зацепление одностороннего сцепления в сборе включает этап разблокировки одностороннего сцепления.
13. Способ по п. 7, отличающийся тем, что выборочное зацепление сцепления привода в сборе включает этап высвобождения первого тягового кольца.
14. Способ по п. 7, отличающийся тем, что выборочное зацепление сцепления привода в сборе включает этап высвобождения клетки.
15. Способ управления трансмиссией с изменяемым передаточным отношением, содержащей несколько наклоняемых шаров, соприкасающихся с первым тяговым кольцом и клеткой, при этом одностороннее сцепление в сборе выборочно соединено с первым тяговым кольцом и клеткой, а сцепление привода в сборе выборочно соединено с первым тяговым кольцом и
клеткой, при этом способ включает:
получение по меньшей мере одного сигнала, указывающего на текущий рабочий режим трансмиссии;
получение пользовательского сигнала команды;
определение целевого рабочего режима трансмиссии, по меньшей мере, частично на основе пользовательского сигнала команды;
сравнение целевого рабочего режима с текущим рабочим режимом;
выдачу команды одностороннему сцеплению в сборе на выборочную разблокировку первого тягового кольца и/или клетки; и
выдачу команды сцеплению привода в сборе на выборочное зацепление первого тягового кольца и/или клетки.
16. Способ по п. 15, отличающийся тем, что выдача команды одностороннему сцеплению в сборе включает по меньшей мере одно из следующего: разблокировку первого тягового кольца, блокировку клетки, зацепление клетки, блокировку первого тягового кольца, зацепление первого тягового кольца, разблокировку клетки.
17. Способ по п. 15, отличающийся тем, что выдача команды сцеплению привода в сборе включает по меньшей мере одно из следующего: зацепление первого тягового кольца, высвобождение клетки, зацепление клетки и высвобождение первого тягового кольца.
| US 2007155580 A1, 05.07.2007 | |||
| US 2010093476 A1, 15.04.2010 | |||
| US 5318486 A, 07.06.1994 | |||
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2002 |
|
RU2289045C2 |

