Изобретение относится к области регулирования движения автотранспорта и может быть использована для опознавания транспортных средств (ТС).
Известно «Устройство для обнаружения транспортных средств вблизи автобусных остановок» по патенту на изобретение США №5382953 от 14.04.94 г. опубликовано в журнале «Изобретения стран мира», 1996, №3, стр.19), в котором с помощью датчика, устройства обнаружения знака и средства управления производится обнаружение автомобиля. Однако данное устройство обладает низкой технологичностью.
Известно также «Устройство для идентификации автомобилей на станции контроля» по патенту WO №9613023 от 20.10.95 г. (опубликовано в журнале «Изобретения стран мира», 1997 г., №3, стр.28). Указанное устройство содержит на станции контроля видеокамеру и освещающее устройство, формирующее оптическое изображение на поверхности проезжающих автомобилей. Полученное изображение после обработки используется для определения высоты автомобилей. Недостатком данного устройства является узкий диапазон опознаваемых параметров транспортных средств.
Известна «Телематическая система для транспортного средства» по патенту на изобретение РФ №2207262 С1 от 21.10.2002 г. Система содержит общую мультиплексную шину и снабженные интерфейсами электронные модули, часть которых связана с функциональными органами ТС и выявляет состояние этих органов и управление ими. Имеются контроллер локальной информационной сети ТС, контроллер-преобразователь протокола обмена данными, блок приема и передачи данных, например терминал сотовой сети подвижной связи. В охранно-противоугонную подсистему входят собственный контроллер, снабженные интерфейсами электронные блоки, связанные с функциональными органами ТС для обеспечения охраны и защиты от угона, и блок дистанционной идентификации пользователя ТС, состоящий из бесконтактно связанных носимой части, например транспондерной карточки, и возимой части. Кроме того, в систему введены блок считывания контрольных данных, блок сравнения, блок регистрации контролируемых параметров отклонений от штатных режимов и блок записи исходных данных о водителе и ТС в память носимой части блока дистанционной идентификации пользователя. Возимая часть данного блока выполнена с возможностью ввода в нее контролируемых параметров отклонений от штатных режимов и записи их в память носимой части блока дистанционной идентификации пользователя.
Недостатками данной системы является необходимость остановки ТС на контрольном пункте на время проверки и обмена информацией, ограниченное число контролируемых транспортных средств, необходимость санкции пользователя системы для совершения операций дистанционного контроля сотрудниками государственных органов (например, дорожно-постовой службы), отсутствие оборудования государственных стационарных пунктов, предназначенного для опознавания и контроля ТС данной системой.
Наиболее близким аналогом является «Система опознавания транспортных средств» по патенту на изобретение РФ №2295779 С1 от 23.09.2005 г., содержащая «k» контрольных пунктов (где k больше 2), запросчики, устанавливаемые на каждом контрольном пункте, и приемоответчик, размещаемый на каждом автотранспортном средстве, обменивающиеся между собой информацией по радиоканалу, при этом каждый запросчик содержит последовательно соединенные передатчик, элемент развязки и направленную антенну, а также приемник, вход которого подключен ко второму выходу элемента развязки, каждый приемоответчик содержит последовательно соединенные направленную антенну, элемент развязки и приемник, соединенный с передатчиком, выход которого подключен ко второму входу элемента развязки, а также элемент памяти кодового номера, а каждый запросчик дополнительно содержит видеокамеру, при этом выходы видеокамер через первый согласующий блок соединены с первым входом компьютера, устанавливаемого на каждом контрольном пункте, второй вход которого подключен к выходам приемников запросчиков через второй согласующий блок, первый выход компьютера соединен с входами соответствующих передатчиков запросчиков через третий согласующий блок, а второй выход компьютера через третий согласующий блок соединен с входами видеокамер, при этом запросчики расположены над рядами дороги таким образом, чтобы диаграмма направленности каждой из направленных антенн не выходила за пределы соответствующего ряда дороги, компьютеры контрольных пунктов объединены в локальную сеть, а направленные антенны приемоответчиков расположены в верхней части транспортного средства таким образом, чтобы диаграмма направленности охватывала запросчик, расположенный над данным рядом дороги.
Недостатками данной системы являются:
необходимость 2-х контрольных пунктов для определения скорости ТС, причем определяется средняя скорость движения ТС на отрезке дороги между этими контрольными пунктами, а не фактическая в момент прохождения пункта контроля;
отсутствие возможности мониторинга текущих координат и скорости ТС в моменты времени нахождения вне зоны обслуживания контрольного пункта, а также, оперативного выявления ТС, например, находящихся в угоне.
Технический результат изобретения, на достижение которого направлено предполагаемое изобретение, заключается в расширении функциональных возможностей системы опознавания транспортных средств.
Технический результат достигается тем, что предлагается система опознавания транспортных средств, содержащая диспетчерский центр, пункты контроля и бортовые модули. Бортовой модуль, устанавливаемый на каждом транспортном средстве, и контрольный пункт обменивающиеся между собой информацией по радиоканалу в момент прохождения ТС под запросчиком и с некоторой, заранее выбранной (например, 1…10 мин) периодичностью - с диспетчерским центром посредством модема беспроводной связи. Диспетчерский центр (ДЦ) содержит сервер, соединенный с устройством для хранения базы данных, терминалом и модемами для связи с бортовыми модулями и контрольными пунктами. Каждый бортовой модуль содержит микроконтроллер, соединенный с навигационным приемником, например, ГЛОНАСС и/или GPS, запоминающим устройством, датчиком движения, приемопередатчиком ближней связи, например, на основе технологии DSRC (Dedicated Short-Range Communications), и модемом беспроводной связи, например, GSM/GPRS. Терминал беспроводной связи бортового модуля обеспечивает GPRS обмен с диспетчерским центром, а приемопередатчик ближней связи - радиообмен с соответствующим запросчиком пункта контроля. Каждый запросчик содержит последовательно соединенные передатчик, элемент развязки и направленную антенну, а также приемник, вход которого подключен ко второму выходу элемента развязки.
Каждый запросчик дополнительно содержит видеокамеру. Выходы видеокамер через второй согласующий блок соединены с первым входом компьютера контрольного пункта. Второй вход компьютера подключен к выходам приемников запросчиков через третий согласующий блок, первый выход компьютера соединен с входами соответствующих передатчиков запросчиков через первый согласующий блок, а второй выход компьютера через первый согласующий блок соединен с входами видеокамер. Запросчики расположены над рядами дороги таким образом, чтобы диаграмма направленности каждой из направленных антенн не выходила за пределы соответствующего ряда дороги. Направленные антенны приемоответчиков расположены в верхней части транспортного средства таким образом, чтобы диаграмма направленности охватывала запросчик, расположенный над данным рядом дороги.
На фиг.1 представлена структурная схема системы опознавания транспортных средств.
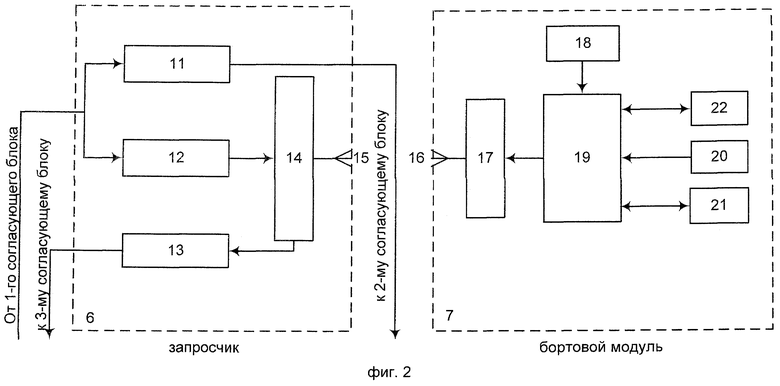
На фиг.2 представлены соответственно структурные схемы запросчика и бортового модуля. Представленный на фиг.1 контрольный пункт 1 содержит компьютер 2, первый согласующий блок 3, второй согласующий блок 4, третий согласующий блок 5, запросчики 6 по числу рядов магистрали и модем 10.
Представленный на фиг.1 диспетчерский центр 23 содержит модем 24, сервер 25, терминал 26, модем 27 и устройство для хранения базы данных 28.
На фиг.1 показаны диаграммы направленности 8 и 9 направленных антенн соответственно, запросчиков 6 и бортовых модулей 7.
На фиг.2 представлены структурная схема запросчика 6, содержащего видеокамеру 11, передатчик 12, приемник 13, элемент развязки 14 и направленную антенну 15, и структурная схема бортового модуля 7 ТС, содержащего направленную антенну 16, приемопередатчик 17, навигационный приемник ГЛОНАСС и/или GPS 18, микроконтроллер 19, датчик движения 20, запоминающее устройство 21 и модем 22.
Система опознавания транспортных средств функционирует следующим образом. На каждое транспортное средство устанавливают бортовой модуль 7 (фиг.2), содержащий микроконтроллер 19, соединенный с навигационным приемником ГЛОНАСС и/или GPS 18, запоминающим устройством 20, датчиком движения 21, приемопередатчиком ближней связи 17, например, использующий технологию DSRC, и модемом 22 беспроводной связи, например, GSM/GPRS. Модем беспроводной связи 22 бортового модуля 7 обеспечивает через модем беспроводной связи 27 (фиг.1) GPRS обмен с сервером 25 диспетчерского центра 23, а приемопередатчик ближней связи 17 радиообмен с соответствующим запросчиком 6 контрольного пункта 1. На контрольных пунктах 1 над дорогой (магистралью) располагают запросчики 6 над рядами дороги таким образом, чтобы диаграмма направленности 8 каждой из направленных антенн 15 не выходила за пределы соответствующего ряда дороги (фиг.1). Направленная антенна 16 приемопередатчика ближней связи 17 расположена в верхней части транспортного средства таким образом, чтобы диаграмма направленности 9 охватывала запросчик 6, расположенный над данным рядом дороги. Диаграммы направленности направленных антенн 15 и 16 выбираются из условий однозначной селекции транспортного средства. Бортовой модуль 7 принимает команды от запросчика 6 сигнал запроса на включение приемопередатчика ближней связи 17, который после получения сигнала запроса передает ответный сигнал, содержащий кодовый номер, индивидуальный для каждого транспортного средства и хранящийся в запоминающем устройстве 20.
Контрольный пункт 1 (фиг.1) содержит компьютер 2, соединенный с тремя согласующими блоками 3, 4 и 5 и модемом 10 для связи с модемом 24 диспетчерского центра 23. Согласующие блоки 3, 4 и 5 соединены с запросчиками 6, количество которых соответствует количеству рядов дороги (магистрали), над которыми они установлены. Каждый запросчик 6 содержит (фиг.2) последовательно соединенные передатчик 12, элемент развязки 14 и направленную антенну 15, а также приемник 13, вход которого подключен ко второму выходу элемента развязки 14 и видеокамеру 11. Входы видеокамеры 11 и передатчика 12 соединены с соответствующим (порядковый номер запросчика 6 контрольного пункта 1) выходом первого согласующего блока 3. Выход передатчика 13 соединен с соответствующим входом третьего согласующего блока 5, а выход видеокамеры 11 соединен с соответствующим входом второго согласующего блока 4.
Передатчик 12 (фиг.2), передает по команде от компьютера 2 посредством первого согласующего блока 3 сигналы запроса на начало работы бортового модуля 7 посредством элемента развязки 14 и направленной антенны 15. Приемник 13, осуществляет прием ответного сигнала от бортового модуля 7, содержащего информацию о кодовом номере транспортного средства и через третий согласующий блок передает ее на компьютер 2. Компьютер 2 через первый согласующий блок 3 формирует запрос на начало работы видеокамеры 11 над данным рядом дороги для визуальной фиксации транспортного средства и его номерного знака. Информация от видеокамеры 11 через второй согласующий блок 4 поступает на компьютер 2, где запоминается и визуализируется. Сигналы содержащие информацию о кодовых номерах транспортных средств от всех приемников 13 запросчиков 6 через третий согласующий блок 5 поступают на компьютер 2, который проверяет их соответствие с номерным знаком ТС, полученным от видеокамеры. Кодовые номера ТС и время их фиксации посредством модемов 10 и 24 передаются на сервер 25 диспетчерского центра 23. Диспетчерский центр 23 содержит сервер, соединенный с модемом 24, терминалом 26, модемом 27 и устройством для хранения базы данных 28 (фиг.1). На сервер 25 с модема 27 поступает информация от бортовых модулей 7 (кодовый номер, время, координаты, скорость ТС). В результате ее сравнения с информацией из устройства для хранения базы данных 28 и с оперативной информацией, получаемой с терминалов 26, сервером 25 формируется и отправляется на контрольный пункт подтверждение, что отслеживаемое по данным мониторинга ТС с данным кодовым номером и номерным знаком в указанное время находилось в районе данного контрольного пункта (или служебная информация, например, ТС находится в угоне или розыске).
Работа контрольного пункта возможна как в автономном режиме, так и при наличии оператора.
Все блоки системы выполнены из стандартных элементов по известным схемам. Например, согласующие блоки выполнены в виде контроллеров, преобразующих поступающую информацию к виду, удобному для обработки компьютером, программа функционирования которого является стандартной для систем охранной сигнализации и пропускных систем.
Использование данной системы позволяет:
обеспечить постоянный мониторинг ТС не только на пункте контроля, но и на всем маршруте его движения благодаря периодически передаваемого бортовым модулем в диспетчерский центр сигналу, содержащему информацию о кодовом номере и навигационных параметрах ТС;
идентифицировать на контрольном пункте ТС с поддельными (или не читаемыми) номерными знаками, благодаря постоянному кодовому номеру, находящемуся в памяти бортового модуля, и информации о ТС, находящейся в устройстве для хранения базы данных ДЦ;
получить информация о маршруте следования ТС, находящегося например в угоне или розыске, до момента времени пересечения им контрольного пункта, благодаря навигационной информации, передаваемой с бортового модуля в устройство для хранения базы данных ДЦ;
получать информацию о скоростном режиме движения ТС как в районе контрольного пункта, так и на всем маршруте его следования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПОЗНАВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2295779C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2351017C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2000 |
|
RU2168768C1 |
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2005 |
|
RU2297045C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ РЕКЛАМНЫХ ОБЪЕКТОВ | 2004 |
|
RU2279139C2 |
| СИСТЕМА ОХРАНЫ, ЗАЩИТЫ И МОНИТОРИНГА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2250844C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С МНОГОСТОРОННЕЙ СВЯЗЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2755068C1 |

Изобретение относится к области регулирования дорожного движения. Система содержит диспетчерский центр, запросчики, установленные на контрольных пунктах, и бортовые модули, устанавливаемые на каждом транспортном средстве (ТС). Бортовой модуль и контрольный пункт обмениваются информацией по радиоканалу между собой и с диспетчерским центром посредством терминала беспроводной связи. Диспетчерский центр содержит сервер, базу данных, терминал и модемы для связи с бортовым модулем и контрольными пунктами. Бортовой модуль содержит микроконтроллер с кодовым номером, индивидуальным для каждого ТС, навигационный приемник ГЛОНАСС/GPS, запоминающее устройство, датчик движения, приемопередатчик ближней связи, например DSRC, и терминал беспроводной связи, например GSM/GPRS. Указанный терминал обеспечивает GPRS обмен с диспетчерским центром, а приемопередатчик ближней связи - с соответствующим запросчиком. Каждый запросчик содержит передатчик, приемник, элемент развязки и направленную антенну, а также видеокамеру. На каждом контрольном пункте имеется компьютер, связанный через соответствующие блоки согласования с приемниками и передатчиками запросчиков, а также с видеокамерами. Запросчики расположены над рядами дороги таким образом, чтобы диаграмма направленности каждой из направленных антенн не выходила за пределы соответствующего ряда дороги. Направленные антенны приемоответчиков расположены в верхней части ТС таким образом, чтобы диаграмма направленности охватывала запросчик, расположенный над данным рядом дороги. Система характеризуется расширенными функциональными возможностями и позволяет, в частности, опознавать транспортные средства на многорядной магистрали без остановки ТС, а также осуществлять его мониторинг вне зоны действия контрольного пункта. 2 ил.
Система опознавания транспортных средств, содержащая расположенные рядом с дорогой контрольные пункты с запросчиками, устанавливаемыми над дорогой, бортовой модуль, размещаемый на каждом автотранспортном средстве, обменивающиеся между собой информацией по радиоканалу, при этом каждый запросчик содержит последовательно соединенные передатчик, элемент развязки и направленную антенну, а также приемник, вход которого подключен ко второму выходу элемента развязки, каждый бортовой модуль содержит соединенные направленную антенну и приемопередатчик, а каждый запросчик дополнительно содержит видеокамеру, при этом выходы видеокамер через второй согласующий блок соединены с первым входом компьютера, устанавливаемого на каждом контрольном пункте, второй вход которого подключен к выходам приемников запросчиков через третий согласующий блок, первый выход компьютера соединен с входами соответствующих передатчиков запросчиков через первый согласующий блок, а второй выход компьютера через первый согласующий блок соединен с входами видеокамер, при этом запросчики расположены над рядами дороги таким образом, чтобы диаграмма направленности каждой из направленных антенн не выходила за пределы соответствующего ряда дороги, а направленные антенны бортового модуля расположены в верхней части транспортного средства таким образом, чтобы диаграмма направленности охватывала запросчик, расположенный над данным рядом дороги, отличающаяся тем, что включает диспетчерский центр, содержащий сервер, соединенный с устройством для хранения базы данных, терминалом и модемами связи соответственно, с бортовым модулем и контрольными пунктами, а бортовой модуль дополнительно содержит микроконтроллер, соединенный с навигационным приемником ГЛОНАСС и/или GPS, датчиком движения, запоминающим устройством и модемом беспроводной связи с диспетчерским центром.
| СИСТЕМА ОПОЗНАВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2295779C1 |
| WO 9613023 A1, 02.05.1996 | |||
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2005 |
|
RU2297045C1 |
| СИСТЕМА ОПОЗНАВАНИЯ АВТОТРАНСПОРТА | 2000 |
|
RU2168768C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| СПОСОБ ПРОТИВОУГОННОЙ ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2417909C1 |

