Изобретение относится к автоматизированным системам опознавания подвижных транспортных средств, контроля и управления их движением и может быть использовано, в частности, для контроля и диспетчерского управления движением городского маршрутизированного транспорта.
Известно устройство для определения местоположения объектов, содержащее установленные на диспетчерском пункте приемники, передатчик, блок совпадения, счетчик циклов, блок измерения, блок формирования синхроимпульса, блок регистрации, датчик времени, а также расположенные на подвижном объекте передатчик, приемники, счетчик циклов, блок синхронизации и размещенный на конечном пункте передатчик. Передатчик диспетчерского пункта и передатчик подвижного объекта работают на различных волнах, но излучают импульсы с близкой частотой повторения и создают на участке движения объектов зону совпадения этих импульсов, перемещающуюся циклично от диспетчерского пункта к подвижному объекту с постоянной скоростью. Блок совпадения подвижного объекта регистрирует прохождение зоны через место расположения подвижного объекта в момент одновременного приема импульсов приемниками подвижного объекта соответственно от передатчика диспетчерского пункта и передатчика конечного пункта. Блок совпадения диспетчерского пункта аналогичным образом регистрирует прохождение зоны через диспетчерский пункт за счет одновременного поступления сигналов от собственного передатчика и приемника, принимающего сигнал с конечного пункта. Передатчик диспетчерского пункта циклически излучает серии импульсов, причем число импульсов в одной серии равно числу контролируемых подвижных объектов. При совпадении номера импульса в серии с номером подвижного объекта включается его передатчик, сигнал которого принимается блоком измерения интервала времени на диспетчерском пункте, и по разнице во времени между излученным и принятым импульсом определяется местоположение подвижного объекта. В конце каждой серии счетчик диспетчерского пункта выдает импульс в блок формирования синхроимпульса, излучаемого передатчиком. Синхроимпульс может отличаться от других импульсов либо частотой, либо большей длительностью. На всех подвижных объектах синхронизирующий импульс поступает на программирующие счетчики и переводит их в исходное нулевое состояние. Далее работа системы продолжается в том же порядке. Недостатком этого устройства является невозможность сравнения заданных и действительных параметров движения [1].
Известно устройство для контроля графика движения транспортного средства, содержащее передатчики, установленные на контрольных пунктах, и установленные на транспортном средстве приемник, избирательный, арифметический и исполнительный блоки, а также счетчик циклов. Устройство работает следующим образом. Транспортное средство совершает несколько рейсов (циклов) по замкнутому маршруту, проходя на каждом цикле последовательно все контрольные пункты, при этом транспортному средству задается время прохождения каждого контрольного пункта на каждом цикле, т.е. задается график движения. В зависимости от номера цикла задатчик контролируемого параметра выдает на вход арифметического блока заданное графиком время движения, где происходит сравнение заданного и фактического времени прибытия транспортного средства на данный контрольный пункт. При отклонении текущего значения времени от заданного арифметический блок находит величину и знак этого отклонения [2].
Известен приемопередающий блок для системы управления подвижными объектами, включающий приемные блоки, передающий блок, подключенный к модулятору, антенну, выполненную в виде петли и размещенную в зоне остановки под дорожным покрытием, световое табло, узел для переговоров и кнопку вызова диспетчера. С устройством через двухпроводную линию связи соединен районный диспетчерский пункт. На подвижном объекте установлен постоянно работающий передатчик, который снабжен кнопкой вызова диспетчера, микрофоном и антенной индуктивной связи, а также постоянно работающий приемник с громкоговорителем и антенной индуктивной связи. Устройство позволяет диспетчеру автоматически определять наличие подвижных единиц на остановках, оборудованных устройством, и вызывать на речевую связь водителей, находящихся на этих остановках; водителю, транспортное средство которого не оборудовано аппаратурой или аппаратура которого неисправна, получить связь для разговора с диспетчером на остановке, оборудованной устройством; водителю подвижной единицы через диспетчера получить связь с городскими аварийными службами. К недостаткам данного устройства относятся необходимость точной остановки подвижной единицы над петлей антенны индуктивной связи, расположенной под дорожным покрытием, низкое качество проводных каналов связи и их низкая пропускная способность [3].
Известно устройство для сбора и передачи информации о движении автобусов, содержащее аппаратуру формирования и выдачи кода автобуса по запросу, устанавливаемую в автобусах, аппаратуру контрольных (КП), линейных диспетчерских (ЛДП) и центрального диспетчерского (ЦДП) пунктов. Аппаратура контрольного пункта производит периодический опрос по радиолинии автобусов, останавливающихся в зоне действия КП. При остановке автобуса в зоне действия КП в момент приведения в действие устройства для открывания одной из дверей включается питание аппаратуры формирования и выдачи кода автобуса. При получении запроса, переданного по радиоканалу с контрольного пункта, аппаратура автобуса формирует и выдает информацию по радиоканалу о номере маршрута и номере наряда в маршруте в виде помехозащищенного кода с частотно-импульсной и амплитудной модуляцией. Аппаратура КП принимает этот код, преобразует его в помехозащищенный код с полярным признаком и ретранслирует этот код по проводному каналу на линейный диспетчерский пункт. На ЛДП этот код принимается блоком приема и декодирования кодовых комбинаций, производится автоматический контроль регулярности движения автобусов, основанный на сравнении времени прохождения КП с графиком движения, задаваемым диспетчером до выхода автобуса в рейс программному автомату, документальная регистрация результатов контроля по окончании оборота, сбор и передача на центральный диспетчерский пункт по проводной линии связи данных о работе маршрутов, закрепленных за данным ЛДП, а именно: количество действующих на маршруте нарядов, количество автобусов, находящихся в простоях, возвратах, переключениях и заказах, сигнал о возникновении длительного нарушения регулярности движения автобусов по маршруту. Аппаратура ЦДП принимает информацию с линейных диспетчерских пунктов, отображает ее в цифровом виде на диспетчерском щите и при необходимости вводит в ЭВМ [4].
Известно устройство контроля движения транспортных средств, содержащее центральный пункт (ЦП) и транспортные средства (ТС). На центральном пункте установлены блок вызова транспортных средств, блок приема информации, блок памяти, блок питания, блок ввода информации. Каждое ТС содержит блоки приема и передачи информации, блок генераторов импульсов и блок питания. После подачи питания все блоки центрального пункта устанавливаются в начальное состояние и начинается последовательный опрос транспортных средств. Формируется передаваемый пакет информации : стартовая посылка, пауза, служебный импульс и код номера контрольной точки. Этот пакет проходит через передатчик ЦП на вход приемника на ТС. При совпадении кода номера ТС с кодом запроса сигнал запроса принимается приемником ТС и разрешает подачу питания на остальные блоки ТС. Принятый сигнал проходит на один из входов передатчика ТС, при этом формируется короткий импульс, который принимается приемником ЦП и разрешает прием ответного сообщения. В память на ЦП записывается время приема сигнала, туда же поступают коды местоположения и номера ТС [5].
Наиболее близким по технической сущности, выбранным в качестве прототипа, является устройство для контроля движения транспортных средств, содержащее центральный диспетчерский пункт (ЦДП) и транспортные средства (ТС), на каждом из которых установлены приемопередатчик, блок управления, цифроаналоговый преобразователь, блок ввода-вывода речи (телефон с датчиками тангенты и трубкодержателя) и индикатор отклонения от графика, причем входы и выходы приемопередатчика через радиоканалы соединены с входами и выходами приемопередатчика центрального диспетчерского пункта. Контроль местоположения ТС на маршруте и обмен с ними информацией осуществляет ЦДП, который производит поочередный опрос всех ТС в режиме "Запрос - ответ". При этом аппаратура ЦДП находится в режиме передачи информации на первом канале приемопередатчика и поочередно посылает в эфир кодограммы, каждая из которых содержит стартовую посылку, код номера ТС, отклонение от графика и команду вызова на речевую связь. При включении питания аппаратуры ТС приемопередатчик устанавливается в режим приема кодограммы ЦДП по первому каналу. При совпадении номера ТС с кодом номера в кодограмме выдается разрешение на перезапись информации в буферный регистр. В результате информация об отклонении от графика поступает на индикатор, а информация о вызове на речевую связь в блок управления. Одновременно формируется ответная кодограмма. После приема ответной кодограммы ТС на ЦДП происходит определение местоположения соответствующего ТС на маршруте и фиксация текущего времени при обмене информацией. Полученное отклонение фактического времени от планового передается на ТС в следующем сеансе передачи информации, где оно отображается на индикаторе. Если номер ТС не совпадает с номером, заданным кодограммой, то перезаписи в буферный регистр не происходит. Для речевой связи диспетчера с водителем на ЦДП формируется команда вызова, при приеме которой включается звуковая сигнализация на ТС. После сеанса связи, которая осуществляется по второму каналу приемопередатчика, диспетчер формирует команду сброса. Если инициатором речевой связи является водитель, то он посылает команду вызова на ЦДП, и диспетчер после приема запроса на связь вызывает соответствующее транспортное средство [6].
Задача, положенная в основу предлагаемого технического решения, заключается в расширении функциональных возможностей системы, повышении качества управления благодаря оперативной речевой связи водителей и диспетчера за счет того, что каждая информационная посылка длительностью, равной периоду дискретизации речевого сигнала, содержит как телеметрическую, так и речевую информацию, передаваемую в цифровой форме с временным уплотнением так, что запросное и ответное сообщения передают по независимым каналам, и сокращении времени, необходимого для оказания помощи пассажирам и водителю при возникновении нештатных ситуаций (например, авария или нападение на водителя) за счет кратковременного повышения мощности передатчика для устойчивого приема на центральном диспетчерском пункте сигналов об аварии или нападении как при нахождении подвижной единицы в зоне действия контрольного пункта (на расстоянии до 100 м от него), так и в любой точке маршрута, а также вне его.
Поставленная задача решается следующим образом. В систему диспетчерского управления наземным транспортом, содержащую центральный диспетчерский пункт (ЦДП) с двухканальным приемопередатчиком и подвижные единицы (ПЕ), на каждой из которых установлены приемопередатчик, соединенный с блоком управления, цифроаналоговый преобразователь, индикатор отклонения от графика и блок ввода-вывода речи, согласно предлагаемому техническому решению, введены контрольные пункты (КП), на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов, соединенные с микроконтроллером, на центральном диспетчерском пункте введены соединенный портом ввода-вывода с приемопередатчиком адаптер каналов связи, последовательно соединенные цифроаналоговый преобразователь, блок ввода-вывода речи и аналого-цифровой преобразователь, выходы которого подключены к группе входов адаптера каналов связи, первая группа выходов которого соединена со входами цифроаналогового преобразователя, а вторая группа выходов - с управляющими входами блока ввода-вывода речи, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров (АРМД) и вспомогательного персонала, на подвижной единице введены подключенный к группе входов блока управления аналого-цифровой преобразователь и соединенный с одним из портов ввода-вывода блока управления пульт управления и индикации с индикатором нахождения подвижной единицы в зоне действия контрольного пункта, индикатором вызова водителя на речевую связь с центральным диспетчерским пунктом, индикатором успешного обмена информацией между подвижной единицей и центральным диспетчерским пунктом и органами ввода дискретной информации (например, кнопками) о нападении, об аварии, о вызове диспетчера на речевую связь и окончании сеанса речевой связи ("отбой"), к первой группе выходов блока управления подключены входы цифроаналогового преобразователя, выходом соединенного с информационным входом блока ввода-вывода речи, управляющие входы которого подключены ко второй группе входов блока управления, а выход - к входу аналого-цифрового преобразователя, причем приемопередатчик выполнен двухканальным, а блок управления на подвижной единице выполнен на микроконтроллере.
Новый технический результат заключается в том, что блок управления на подвижной единице выполнен на микроконтроллере, в составе аппаратуры контрольного пункта имеется микроконтроллер, а на центральном диспетчерском пункте использован файл-сервер, объединенный в локальную вычислительную сеть с адаптером каналов связи и автоматизированными рабочими местами диспетчеров и вспомогательного персонала, что позволяет повысить гибкость, мобильность системы и расширить ее функциональные возможности благодаря использованию новых алгоритмов обработки информации, организовать одновременную работу нескольких диспетчеров и радиомодемную связь с другими источниками и пользователями информации; автоматизация процессов обмена информацией между устройствами подвижной единицы (УПЕ), КП и ЦДП, применение безбумажной технологии (выдается только окончательный документ - ведомость по заработной плате и отчетные документы по расходу горючего, пробеге ПЕ и т.д., которые предоставляются для отчета вышестоящим организациям, а промежуточные данные по любой ПЕ, обо всех ПЕ в за отчетный период - смену, сутки и т.д. - в удобной для диспетчера форме, например, в форме таблицы или мнемосхемы на экране терминала или отпечатанной на принтере, выдаются только по запросу оператора) позволяет повысить скорость, качество обработки информации, ее достоверность и качество управления маршрутизированным транспортом;
использование цифроаналогового и аналого-цифрового преобразователей позволяет передавать речь в составе информационных посылок так, что каждая информационная посылка длительностью, равной периоду дискретизации речевого сигнала, содержит как телеметрическую информацию о параметрах движения подвижной единицы (например, ее номер, номер маршрута, номер наряда в маршруте, номер последнего пройденного контрольного пункта и не менее двух номеров предыдущих контрольных пунктов для определения направления движения, признаки наличия или отсутствия - "0" или "1" - аварии или нападения на водителя, вызова диспетчера водителем ПЕ на речевую связь, окончания сеанса речевой связи), техническом состоянии подвижной единицы (например, загрузка, средний расход топлива, средняя скорость движения по участкам, максимальная скорость, возникшие неисправности и т.д.), так и речь, и передается в цифровой форме с временным уплотнением и помехозащищенным кодированием таким образом, что запросное и ответное сообщения передают по независимым каналам; это позволяет вести переговоры между водителем и диспетчером, не прерывая передачи телеметрической информации, что исключает ее потери и повышает оперативность диспетчерского управления; кроме того, передача речи в цифровой форме позволяет повысить качество связи: помехозащищенное кодирование и избыточность дают возможность восстановить частично утерянную в результате помех информацию;
адаптер каналов связи - контроллер, управляющий обменом информации между локальной вычислительной сетью и приемопередатчиком, необходимый для их стыковки, представляет собой компьютер с высокоскоростным (до 10 Мбод) последовательным интерфейсом, применение которого позволяет повысить скорость передачи телеметрической и речевой информации и ее помехозащищенность за счет многократной передачи информационных посылок с последующей обработкой (накоплением, декодированием для обнаружения и исправления ошибок, мажоритированием и т.д.);
наличие у водителя пульта управления и индикации позволяет не только получить информацию об отклонении от графика, но и о нахождении в зоне действия контрольного пункта, об успешном обмене информацией с центральным диспетчерским пунктом, о вызове водителя диспетчером на речевую связь; кроме того, при возникновении нештатных ситуаций, например, при аварии или нападении, водитель нажимает соответствующую кнопку на пульте и благодаря кратковременному повышению мощности передатчика подвижной единицы сигнал об аварии или нападении устойчиво принимается на ЦДП как при нахождении подвижной единицы в зоне действия контрольного пункта (на расстоянии до 100 м от него), так и в любой точке маршрута, а также вне его, что позволяет значительно сократить время, необходимое для оказания помощи пассажирам и водителю;
при нападении на водителя или угоне транспортного средства тревожные сигналы принимаются каждым контрольным пунктом по ходу следования транспортного средства, что позволяет контролировать и прогнозировать маршрут движения транспортного средства.
Таким образом, перечисленная совокупность признаков по сравнению с прототипом позволяет расширить функциональные возможности системы, повысить качество диспетчерского управления наземным маршрутизированным транспортом и сократить время, необходимое для оказания помощи пассажирам и водителю при возникновении нештатных ситуаций.
Анализ известных технических решений позволяет сделать вывод о том, что заявляемое техническое решение не известно из уровня техники, что свидетельствует о его соответствии критерию "новизна".
Сущность заявляемого изобретения для специалиста не следует явным образом из уровня техники, что позволяет сделать вывод о его соответствии критерию "изобретательский уровень".
Возможность использования заявляемого способа в системе диспетчерского управления городским транспортом позволяет сделать вывод о его соответствии критерию "промышленная применимость".
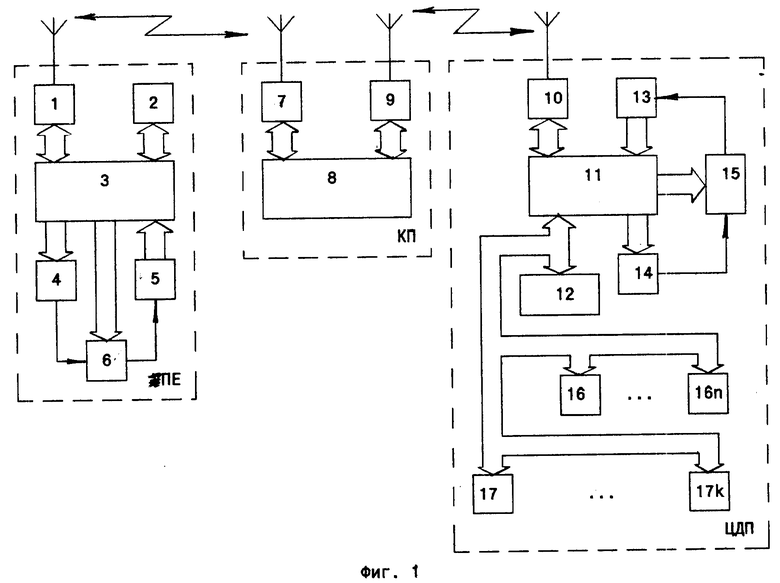
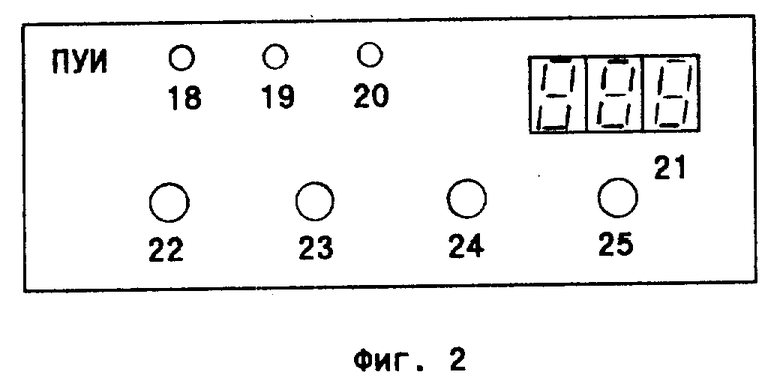
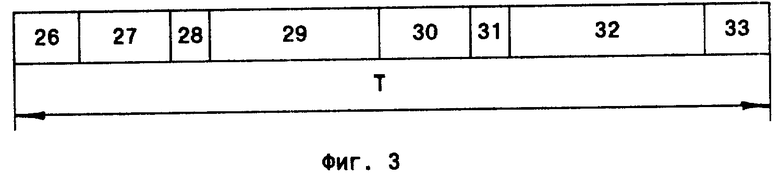
Сущность предлагаемой системы диспетчерского управления наземным транспортом поясняется чертежами, где на фиг. 1 изображена структурная схема системы; на фиг.2 - возможный вариант оформления панели пульта управления и индикации подвижной единицы; на фиг.3 - пример структурной организации информационной посылки.
Система диспетчерского управления наземным транспортом (см. фиг.1) содержит на подвижной единице приемопередатчик 1, пульт управления и индикации 2, блок управления 3, выполненный на микроконтроллере, цифроаналоговый преобразователь 4, аналого-цифровой преобразователь 5 и блок ввода-вывода речи 6 (содержащий, например, громкоговоритель и микрофон или телефонную трубку с датчиком трубкодержателя); на контрольном пункте - приемопередатчик 7 ближнего радиоканала, микроконтроллер 8 и приемопередатчик 9 дальнего радиоканала; на центральном диспетчерском пункте - приемопередатчик 10 дальнего радиоканала, адаптер каналов связи 11, файл-сервер 12, аналого-цифровой преобразователь 13, цифроаналоговый преобразователь 14, блок ввода-вывода речи 15, автоматизированные рабочие места диспетчеров 16(1)...16(n) и вспомогательного персонала 17(1)...17(k).
На панель пульта управления и индикации УПЕ (см. фиг.2) выведены индикаторы нахождения в зоне контрольного пункта 18, вызова от диспетчера на речевую связь 19, успешного обмена информацией 20 и времени отклонения от графика 21, а также органы ввода дискретной информации (например, кнопки) о нападении 22, об аварии 23, о вызове диспетчера на речевую связь 24 и об окончании сеанса связи ("отбой") 25.
При включении аппаратуры центрального диспетчерского пункта с рабочих мест вспомогательного персонала (программистов-операторов) 17(1)... 17(k) производится первичная установка параметров системы: занесение в память файл-сервера 12 номеров контрольных пунктов, подвижных единиц, маршрутов, номеров нарядов в маршрутах и графиков движения (времени прохождения каждого контрольного пункта маршрута) для каждой подвижной единицы.
Центральный диспетчерский пункт работает параллельно и независимо в двух режимах - автоматическом и диспетчерского управления.
В автоматическом режиме приемопередатчик 10 дальнего канала на ЦДП под управлением адаптера каналов связи 11 непрерывно производит циклический опрос всех контрольных пунктов, прием информации о параметрах движения по маршрутам подвижных единиц и их техническом состоянии, а включенные в локальную вычислительную сеть файл-сервер 12 и компьютеры АРМД 16(1)...16(n) - обработку, хранение, отображение полученной информации и корректировку графиков движения на основе анализа статистических данных.
Каждый контрольный пункт является активным ретранслятором с накоплением информации. Приемопередатчик 7 ближнего радиоканала контрольного пункта под управлением микроконтроллера 8 непрерывно производит циклическое сканирование зоны контроля и поочередный опрос всех ПЕ, находящихся в зоне контроля. Приемопередатчик 1 УПЕ включен на прием по первому каналу и передает информацию только по запросу контрольного пункта или диспетчера через посредство КП. При совпадении кода ПЕ, находящейся в зоне контроля КП (о чем свидетельствует включенное состояние индикатора 18 нахождения ПЕ в зоне КП на панели пульта 2 управления и индикации УПЕ), с кодом запроса приемопередатчик 1 УПЕ под управлением блока 3 управления передает по второму каналу на КП телеметрическую информацию о параметрах движения ПЕ (например, номер ПЕ, номер маршрута, номер наряда в маршруте, номер пройденного последним контрольного пункта и не менее двух номеров предыдущих контрольных пунктов для определения направления движения, признаки наличия или отсутствия аварии или нападения, вызова диспетчера водителем ПЕ и окончания сеанса речевой связи), техническом состоянии ПЕ (например, загрузка, средний расход топлива, средняя скорость движения по участкам, максимальная скорость, возникшие неисправности и т.д.). Приемопередатчик 7 ближнего радиоканала КП принимает информацию с УПЕ, микроконтроллер 8 кодирует ее индивидуальным для данного КП кодом, а приемопередатчик 9 дальнего радиоканала КП передает эту информацию на ЦДП. Приемопередатчик 10 дальнего радиоканала ЦДП принимает информационную посылку, адаптер 11 каналов связи преобразует ее и передает в файл-сервер 12, который обрабатывает полученную информацию, вычисляет отклонение фактического времени прибытия ПЕ на КП от планового, затем информация об отклонении от графика вместе с сигналом об успешном обмене информацией (сигнал квитирования) преобразуется адаптером 11 каналов связи и передается передатчиком 10 дальнего радиоканала на ПЕ через КП, в результате чего на панели пульта 2 управления и индикации УПЕ индикатором 21 высвечивается величина отклонения фактического времени прибытия на КП от планового и включается индикатор 20 успешного обмена информацией между УПЕ и ЦДП. После этого опрос зоны контроля КП продолжается в порядке возрастания номеров ПЕ. Если в зоне КП находится несколько ПЕ, то опрос ПЕ осуществляется в порядке возрастания их номеров. Поскольку ответные сообщения формируются только после получения запроса по своему номеру, исключается возможность одновременного излучения сигналов с нескольких ПЕ, и тем самым исключается возможность сбоев, вызванных наложением информации. Если в зоне КП нет ни одной ПЕ, происходит непрерывный последовательный цикл формирования и излучения запросных сообщений с последующим повторением этих циклов.
Аппаратура ближнего радиоканала имеет радиус действия около 100 м. Это позволяет использовать передатчики малой мощности, что снижает себестоимость системы и обеспечивает соблюдение санитарных норм на радиоизлучения. Кроме того, увеличение радиуса действия передатчиков, а следовательно, и зоны контроля КП, привело бы к снижению точности определения местоположения ПЕ. Указанная величина зоны контроля достаточна для нахождения в ней нескольких ПЕ одновременно и не требует точной остановки в определенной точке и точной ориентации ПЕ.
Информационные посылки передаются помехозащищенным кодом с обнаружением и исправлением ошибок, что позволяет существенно повысить помехозащищенность передаваемой информации. После успешного приема информации на ЦДП в ответном сообщении посылается на ПЕ сигнал квитирования. При отсутствии сигнала квитирования с ПЕ посылается повторный запрос. При длительном отсутствии сигнала квитирования делается вывод о неисправности аппаратуры КП или УПЕ, о чем сигнализируется диспетчеру для принятия мер по устранению нарушений работы системы.
В режиме диспетчерского управления, осуществляемом параллельно и независимо с автоматическим, диспетчер при помощи АРМД 16(i) вызывает на речевую связь водителя любой ПЕ, либо всех водителей определенного маршрута, либо всех водителей, находящихся в зоне действия определенного КП, либо - при циркулярном вызове - всех водителей для изменения графика движения, маршрута, количества машин на маршруте в зависимости от изменения пассажиропотока (например, при проведении массовых мероприятий), при изменении погодных условий (например, уменьшение скорости при гололеде, дожде и т.п.), дорожной ситуации (например, ремонт дороги, дорожно-транспортное происшествие и т.п. ), выводит при необходимости промежуточные данные по любой ПЕ, обо всех ПЕ за отчетный период (смену, сутки и т.д.) в удобной для визуального контроля форме (например, в форме таблицы или мнемосхемы на экране терминала или отпечатанной на принтере). Окончательным документом является ведомость по заработной плате и отчетные документы по расходу горючего, пробеге ПЕ и т.д., которые предоставляются для отчета вышестоящим организациям.
При вызове водителей, находящихся в зоне действия определенного КП, диспетчер набирает на клавиатуре АРМД 16(i) номер КП, посылая сигнал вызова нескольким водителям. Их приемопередатчики настраиваются на прием, и водители ожидают речевого сообщения диспетчера. При циркулярном вызове всех водителей сообщение диспетчера преобразуется аналого-цифровым преобразователем 13 и записывается в память файл-сервера 12; для тех водителей, которые находятся в зонах действия контрольных пунктов, идет сигнал вызова на речевую связь, их приемопередатчики переходят в режим приема и принимают сообщение диспетчера. Для водителей ПЕ, находящихся в момент передачи циркулярного сообщения между КП, после их прибытия и опознавания в зоне действия какого-либо КП передается сигнал вызова на речевую связь, устанавливающий их приемопередатчики в режим приема, из памяти файл-сервера 12 извлекается сообщение, преобразуется адаптером 11 каналов связи в помехозащищенный код с обнаружением и исправлением ошибок и передается приемопередатчиком 10 дальнего радиоканала в составе информационных посылок на эти ПЕ через посредство КП.
При вызове водителя определенной ПЕ на речевую связь диспетчер на пульте АРМД 16(i) набирает номер необходимой ПЕ и в составе информационной посылки передает сигнал вызова через КП, в зоне действия которого находится эта ПЕ. Приемопередатчик 1 УПЕ настраивается в режим приема, на пульте 2 управления и индикации загорается индикатор 19 вызова от диспетчера и звучит сигнал вызова. Водитель ПЕ, в состав блока 6 ввода-вывода речи которой входит телефонная трубка, должен взять трубку. Если блок 6 ввода-вывода речи УПЕ оборудован громкоговорителем и микрофоном, под действием блока 3 управления цифроаналоговый преобразователь 4 подключается через усилитель к громкоговорителю. Диспетчер с помощью блока 15 ввода-вывода речи передает сообщение водителю. При этом аналого-цифровым преобразователем 13 речь преобразуется в цифровую форму, и в составе информационных посылок, формируемых файл-сервером 12, преобразуется адаптером 11 в помехозащищенный код с обнаружением и исправлением ошибок (например, код Рида-Соломона), который излучается приемопередатчиком 10 дальнего радиоканала ЦДП, принимается приемником 9 дальнего радиоканала КП, преобразуется микроконтроллером 8 КП, излучается приемопередатчиком 7 ближнего радиоканала КП, принимается приемопередатчиком 1 подвижной единицы с заданным номером (если код ее номера совпадает с переданным в сообщении номером), преобразуется под действием блока 3 управления УПЕ цифроаналоговым преобразователем 4 и поступает в блок 6 ввода-вывода речи УПЕ. Водитель слышит сообщение диспетчера. Если водителю необходимо связаться с диспетчером, водитель нажимает кнопку 21 вызова диспетчера, что фиксируется блоком 3 управления, и в составе телеметрической части информационной посылки (см. фиг.3) передается на ЦДП через КП, в зоне действия которого находится ПЕ. Диспетчер получает сигнал вызова и разрешает речевую связь. Водитель говорит в микрофон или телефонную трубку блока 6 ввода-вывода речи, аналого-цифровой преобразователь 5 преобразует сигнал в цифровую форму и под воздействием блока 3 управления приемопередатчик 1 передает речевое сообщение водителя в составе информационных посылок на ЦДП через КП, в зоне действия которого находится ПЕ. Принятое приемопередатчиком 10 сообщение декодируется адаптером 11, преобразуется цифроаналоговым преобразователем 14 и поступает в блок 15 ввода-вывода речи на ЦДП. По окончании сеанса связи водитель нажимает кнопку 25 на пульте 2 управления и индикации УПЕ.
При возникновении нештатных ситуаций (например, нападение на водителя или аварийная ситуация) водитель ПЕ нажимает на панели управления и индикации УПЕ соответствующую кнопку (для сигнализации об аварийной ситуации - кнопку 22, для сигнализации о нападении - кнопку 23), и его вызов через КП, в зоне действия которого он находится, ретранслируется на ЦДП. Сигнал передают многократно для того, чтобы он мог быть принят с большей вероятностью. Для устойчивого приема из любой точки маршрута (даже вне зоны действия КП), а также вне маршрута, сигналов об аварийной ситуации или нападении на водителя предусмотрено кратковременное повышение мощности передатчика.
Обмен информацией между УПЕ и КП, между КП и ЦДП, между ЦДП и УПЕ ведется по радиоканалу. Организовано два канала передачи информации: прямой - от ЦДП к КП и далее от КП к УПЕ и обратный - от УПЕ к КП и далее к ЦДП. Все сигналы, в том числе и речевые, передаются в цифровой форме помехозащищенным кодом с временным уплотнением старт-стопными посылками с частотой повторения, равной частоте дискретизации речевого сигнала. Информационная посылка содержит (см. фиг.3): стартовую посылку 26, адрес речевой посылки 27, признак речевой посылки 28, собственно речевую посылку 29, адрес телеметрической посылки 30, признак телеметрической посылки 31, собственно телеметрическую посылку 32 и стоповую посылку 33. В составе телеметрической посылки с УПЕ на ЦДП передается, например, код номера ПЕ, номера маршрута, номера наряда в маршруте, признаки наличия или отсутствия вызова диспетчера на речевую связь, нападения, аварии, окончания сеанса связи, возникшие неисправности. В составе телеметрической посылки с ЦДП на УПЕ передается, например, код номера КП, номера ПЕ, отклонение от графика, наличие или отсутствие признака вызова на речевую связь, успешного обмена информацией. Период передачи Т обратно пропорционален частоте дискретизации речевого сигнала. Речевой канал является дуплексным. Информационная емкость системы -100 КП и 1000 УПЕ с возможностью увеличения.
Таким образом, преимущества предлагаемой автоматизированной системы диспетчерского управления наземным транспортом заключаются в следующем:
применение микроконтроллеров в составе УПЕ и аппаратуры КП, файл-сервера с автоматизированными рабочими местами диспетчеров и вспомогательного персонала, объединенных в локальную вычислительную сеть на ЦДП, позволяет расширить функциональные возможности по сравнению с прототипом, а именно: организовать одновременную работу нескольких диспетчеров и радиомодемную связь с другими источниками и пользователями информации; автоматизировать процессы обмена информацией между устройствами подвижной единицы, КП и ЦДП, применять безбумажную технологию обработки информации, повысить скорость, качество обработки информации, ее достоверность и качество управления маршрутизированным транспортом;
использование цифроаналогового и аналого-цифрового преобразователей позволяет передавать речь в цифровой форме с временным уплотнением в составе информационных посылок, что позволяет вести переговоры между водителем и диспетчером, на прерывая передачи телеметрической информации, что повышает скорость обмена информацией и исключает ее потери; кроме того, передача речи в цифровой форме позволяет повысить качество связи: помехозащищенное кодирование и избыточность дают возможность восстановить частично утерянную в результате помех информацию;
применение адаптера каналов связи позволяет повысить скорость передачи информации и ее помехозащищенность за счет многократной передачи информационных посылок с последующей их обработкой;
наличие у водителя пульта управления и индикации позволяет не только получить информацию об отклонении от графика, как в прототипе, но и о нахождении в зоне действия контрольного пункта, об успешном обмене информацией с центральным диспетчерским пунктом и о вызове от диспетчера на речевую связь; кроме того, при аварии или нападении водитель может подать соответствующий сигнал, даже находясь вне зоны действия какого-либо КП и вне маршрута за счет кратковременного повышения мощности передатчика, что позволяет устойчиво принимать эти сигналы на ЦДП и сократить время, необходимое для оказания помощи пассажирам и водителю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ МАРШРУТИЗИРОВАННЫМ ТРАНСПОРТОМ | 2005 |
|
RU2305326C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| Устройство для контроля движения транспортных средств | 1989 |
|
SU1695352A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
Изобретение относится к автоматизированным системам опознавания подвижных транспортных средств, контроля и управления их движением и может быть использовано, в частности, для контроля и диспетчерского управления движением городского маршрутизированного транспорта. Система диспетчерского управления наземным транспортом содержит центральный диспетчерский пункт, подвижные единицы (ПЕ) и контрольные пункты (КП), на каждом из которых установлены приемопередатчики ближнего и дальнего радиоканалов и микроконтроллер, на центральном диспетчерском пункте установлены двухканальный приемопередатчик, адаптер каналов связи, цифроаналоговый преобразователь, блок ввода-вывода речи и аналого-цифровой преобразователь, а также объединенные в локальную вычислительную сеть с адаптером каналов связи файл-сервер и автоматизированные рабочие места диспетчеров и вспомогательного персонала, на подвижной единице установлены двухканальный приемопередатчик, блок управления, цифроаналоговый преобразователь, аналого-цифровой преобразователь, блок ввода-вывода речи и пульт управления и индикации. 1 з.п. ф-лы, 3 ил.