Настоящее изобретение относится к спасательной лифтовой системе, обеспечивающей перемещение кабины лифта в положение для высадки пассажиров во время спасательной операции.
В современных лифтах реализована спасательная функция, предусматривающая перемещение кабины лифта к посадочной площадке и возможность безопасной высадки пассажиров в аварийной ситуации. К аварийным ситуациям относится, например, нарушение электроснабжения вследствие прекращения обслуживания электросетью общего пользования. В такой ситуации вызывают специалиста по обслуживанию лифтов для выполнения спасательной операции, включающей перемещение кабины лифта посредством отпускания тормоза, вызвавшего резкую остановку кабины лифта после возникновения аварийной ситуации. В современных лифтах в основном используют электромагнитные тормоза, и для отпускания тормоза и проведения спасательной операции требуетсяся большое количество электроэнергии. Необходимая электроэнергия обычно запасена в аккумуляторе, специально предназначенном для проведения спасательной операции. Поскольку аккумуляторы, запасающие значительное количество электроэнергии, дороги, имеют большие размеры и массу, необходимая спасательная функция налагает нежелательные ограничения на конструкцию лифтовой системы в целом. Кроме того, лифтовые спасательные операции обычно весьма обременительны, так как спасательное оборудование, содержащее аккумулятор для спасательной операции и схемное решение для отпускания тормоза, не всегда доступно для специалиста по обслуживанию лифта. Это ведет к затягиванию спасательной операции, что, в свою очередь, может привести к увеличению потребления электроэнергии, так как указанное оборудование должно работать в течение все более длительного срока.
Таким образом, весьма востребована спасательная лифтовая система с низким энергопотреблением и легкая в обслуживании для специалиста по обслуживанию лифтов.
Варианты реализации изобретения содержат спасательную лифтовую систему для перемещения кабины лифта в положение для высадки пассажиров в процессе спасательной операции. Спасательная лифтовая система содержит спасательное устройство, соединенное с тормозной системой лифта, содержащее спасательный источник электропитания и расположенное вблизи указанной тормозной системы лифта; пульт управления, содержащий ручной переключатель для переключения в режим спасательной операции и расположенный удаленно по отношению к указанному спасательному устройству; и передающий канал для передачи сигнала, соответствующего режиму спасательной операции, между указанным спасательным устройством и указанным пультом управления.
Кроме того, варианты реализации включают способ перемещения кабины лифта в положение для высадки пассажиров в процессе спасательной операции, включающий формирование передающего канала для передачи сигнала, соответствующего режиму спасательной операции, между спасательным устройством и пультом управления, причем указанное спасательное устройство соединено с тормозной системой лифта, содержит спасательный источник питания и расположено вблизи указанной тормозной системы лифта, пульт управления содержит ручной переключатель для переключения в режим спасательной операции и расположен удаленно по отношению к указанному спасательному устройству. Указанный способ дополнительно включает запуск спасательной операции при получении сигнала от указанного ручного индикаторного переключателя для переключения в режим спасательной операции, выполненного с возможностью индикации команды на начало спасательной операции.
Ниже приведено подробное описание вариантов реализации настоящего изобретения со ссылками на прилагаемый чертеж (Фиг.1):
На Фиг.1 показана блок-схема той части лифтовой системы, которая содержит спасательную систему лифта.
На Фиг.1 изображена блок-схема части лифтового устройства в соответствии с одним из вариантов реализации. Указанная часть содержит спасательная лифтовую систему в соответствии с одним из вариантов реализации настоящего изобретения. Указанная лифтовая система содержит привод 2 и тормоз 4 для перемещения и остановки кабины лифта (не показано). Указанная лифтовая система может содержать кабину лифта и противовес, причем привод 2 и тормоз 4 выполнены с возможностью одновременного перемещения указанной кабины лифта и указанного противовеса. Указанный лифт может представлять собой лифт без машинного помещения, а указанная кабина лифта с указанным противовесом могут быть выполнены с возможностью их подвешивания с конфигурацией канатов «два к одному». Указанная лифтовая система также может представлять собой лифтовую систему с канатоведущим шкивом, с приводом 2, содержащим канатоведущий шкив для передачи движения одному или нескольким подвесам, таким как канаты или ремни. Однако настоящее изобретение применимо к широкому спектру различных типов лифтовых систем, таких как как лифты с канатоведущим шкивом, лифты с барабанной лебедкой, гидравлические лифты, а также лифты с различными конфигурациями подвесов/канатов.
Указанная лифтовая система дополнительно содержит управляющее устройство 8 для управления приводом и тормозом, которое соединено с приводом 2 и тормозом 4. Кроме того, устройство 8 соединено с источником 6 электропитания. Источник 6 электропитания выполнен с возможностью обеспечения указанной лифтовой системы электропитанием. Источник электропитания выполнен с возможностью прямого или непрямого соединения с единой энергетической системой. Соответственно, источник 6 электропитания обычно выполнен с возможностью подачи питания переменного тока 110-230 В и 50-60 Гц, обычно доступного из единой энергетической системы. В соответствии с другим вариантом реализации, возможно выполнение предварительного преобразования электрической энергии, полученной из единой энергетической системы, а преобразованная энергия может быть подана в указанную лифтовую систему посредством источника 6 электропитания.
Указанная лифтовая система дополнительно содержит датчик 10 скорости, датчик 12 зоны дверей, и датчик 14 превышения скорости. Кроме того, указанная лифтовая система содержит спасательное устройство 16, которое в свою очередь содержит контроллер 18 переключателя, переключатель 20 и аккумулятор 22. Аккумулятор 22 соединен с источником 6 электропитания и с переключателем 20. Переключатель 20 соединен с тормозом 4 и с контроллером 18 переключателя спасательного устройства 16.
Кроме того, указанная лифтовая система содержит управляющее устройство 24 для управления лифтом, которое соединено с источником 6 электропитания. Кроме того, указанная лифтовая система содержит пульт 26 управления, который соединен с источником 6 электропитания и содержит спасательный контроллер 27, спасательный переключатель 28 и аккумулятор 30.
Устройство 8, датчик 10 скорости, датчик 12 зоны дверей, датчик 14 превышения скорости, спасательное устройство 16, устройство 24 и пульт 26 управления соединены посредством сети 34 для обмена данными, которая представляет собой шину контроллерной сети в соответствии с вариантом реализации согласно Фиг.1. Каждый из указанных компонентов содержит точки доступа к сети 34 для обмена данными. Например, пульт 26 управления содержит точку 26А доступа к шине контроллерной сети (CAN). Указанные точки доступа выполнены с возможностью кодирования/декодирования данных, предназначенных для их передачи через указанную шину в пакетах данных, соответствующих стандарту шины контроллерной сети, и предназначены для управления доступом к указанной шине в соответствии со стандартом CAN указанной шины. В варианте реализации, показанном на Фиг.1, шина 34 сформирована в топологии типа «кольцо». Звено 32, которое соединяет точку 26А доступа пульта управления к сети и точку 16А доступа спасательного устройства к сети, представляет собой часть указанной топологии типа «кольцо» в соответствии с одним из вариантом реализации. Однако для специалиста очевидно, что указанная сеть для обмена данными может быть выполнена в различных топологиях, например в топологии типа «звезда» или в линейной топологии типа «шина». Указанная шина контроллерной сети позволяет всем устройствам, имеющим точки доступа к указанной шине, обмениваться информацией в соответствии с коммуникационным протоколом, общим для всех этих объектов.
Следует отметить, что шина 34 может соединять широкий спектр дополнительных компонентов. К этим компонентам относятся, например, кнопки вызова лифта на отдельных посадочных площадках, кнопки запроса этажа в кабине лифта, дисплей местоположения кабины лифта, расположенный в кабине лифта и на отдельных посадочных площадках, датчики закрытия дверей и т.п. Кроме того, указанная шина контроллерной сети может соединять лифтовые установки, например несколько соседних лифтов, для обеспечения возможности работы управляющего устройства для совместного управления лифтами, выполненного с возможностью координирования отдельных операций нескольких лифтов.
Следует также отметить, что через указанную шину может передаваться электроэнергия для маломощных устройств. Например, датчик 12 зоны дверей, или датчик 14 превышения скорости, или кнопки запроса этажа в лифте (не показано) могут быть снабжены электропитанием посредством шины 34 контроллерной сети. Однако привод 2 и тормоз 4 требуют большего количества электроэнергии, чем то, которое может быть передано через указанную шину. Следовательно, привод 2 и тормоз 4 не считаются маломощными устройствами, тогда как по меньшей мере все электронные устройства считаются маломощными устройствами.
Ниже описан нормальный, т.е. неаварийный, режим эксплуатации в соответствии с вариантом реализации лифтовой системы согласно Фиг.1. В качестве примера рассмотрена ситуация, когда пассажир входит в кабину лифта на одном этаже, например на первом, и нажимает на кнопку запроса другого этажа, например пятого. Этот запрос пассажира передается в устройство 24 посредством указанной шины. Затем устройство 24 передает информацию о том, как должны работать тормоз 4 и привод 2, чтобы кабина лифта начала движение в направлении запрошенной посадочной площадки. Указанная информация об операции управления передается в устройство 8 через шину 34, где она обрабатывается. Указанная информация используется для определения того, какое количество энергии проходит от источника 6 электропитания к приводу 2 и тормозу 4. Различные количества электроэнергии могут относиться к различным напряжениям, различным силам тока или к различным временным интервалам подачи электропитания. Для начала движения лифта на привод 2 через устройство 8 может быть подан начальный уровень мощности, связанный с соответствующей электроэнергией, которая передается на тормоз 4 с целью отпускания тормоза 4. В результате кабина лифта начинает движение по направлению к запрошенной посадочной площадке лифта. Скорость кабины лифта определяется посредством датчика 10 скорости. В соответствии с одним из вариантов реализации, датчик 10 скорости может представлять собой оптический датчик, содержащий пластину с отверстиями, которая прикреплена к приводному валу привода 2, и комбинацию источника света и приемника света, причем указанный источник и указанный приемник расположены на соответствующих сторонах указанной пластины; указанный оптический датчик выполнен с возможностью подсчета числа оборотов посредством подсчета числа раз, когда свет принят через отверстие указанной пластины. Кроме того, датчик 12 зоны дверей выполнен с возможностью обнаружения местоположения кабины лифта относительно отдельных посадочных площадок. Для этой цели кабина лифта и отдельные посадочные площадки могут содержать взаимодействующее оборудование, причем либо элементы датчика 12 зоны дверей, расположенные на посадочных площадках, выполнены с возможностью обнаружения элементов датчика 12 зоны дверей, расположенных на кабине лифта, либо наоборот, элементы датчика 12 зоны дверей, расположенные на кабине лифта, выполнены с возможностью обнаружения элементов датчика 12 зоны дверей, расположенных на посадочных площадках, когда кабина лифта оказывается вблизи посадочной площадки для кабины лифта. Указанное взаимодействие может представлять собой оптическое взаимодействие, или магнитное взаимодействие, или любую другую форму взаимодействия, пригодную для обнаружения близости.
На основании предварительно переданной управляющей информации и информации, полученной от датчика 10 скорости и датчика 12 зоны дверей, устройство 24 непрерывно определяет обновленную управляющую информацию и передает ее в устройство 8 через шину 34. Таким образом оказывается сформирован контур управления, в котором устройство 24 реагирует на сигналы от датчика 10 скорости и датчика 12 зоны дверей посредством управления устройством 8, так что привод 2 и тормоз 4 реализуют желаемый режим работы кабины лифта. В соответствии с вышеуказанным вариантом реализации, кабина лифта перемещается к посадочной площадки, запрошенной пассажиром, и останавливается, когда пол кабины оказывается вровень с запрошенной посадочной площадкой.
Следует отметить, что, в соответствии с другим вариантом реализации, устройство 24 может быть встроено в устройство 8.
Ниже описана спасательная операция указанной лифтовой системы. Переключение из нормального режима эксплуатации в режим спасательной операции может быть инициировано посредством различных событий. Например, прекращение подачи энергии от источника 6 электропитания может прекратить нормальный режим эксплуатации. В результате прекращения подачи энергии от источника 6 электропитания привод 2 и тормоз 4 не снабжаются электроэнергией через устройство 8. В соответствии с одним из вариантов реализации лифтовой системы, тормоз 4 представляет собой электромагнитный тормоз, поэтому вследствие прекращения подачи энергии тормоз приводится в действие. Кроме того, привод 2 не снабжается электроэнергией, так что кабина лифта и противовес останавливаются. В другом примере одна из последовательностей безопасности указанной лифтовой системы может быть нарушена, вследствие чего происходит переключение в режим спасательной операции. Последовательность безопасности может быть определена как последовательность проверок соответствующей функции безопасности, выполняемая периодически с целью обеспечения безопасной работы лифтовой системы в любое время. Если одна из указанных проверок дает сбой, то активируется режим спасательной операции. В этом случае соединение между источником 6 электропитания и приводом 2, а также тормозом 4 через устройство 8 прервано, так что кабина лифта останавливается.
Решение о переключении из нормального режима эксплуатации в режим спасательной операции может, например, приниматься посредством устройства 24. Устройство 24 соединено с источником 6 электропитания, поэтому устройство 24 может обнаруживать прекращение подачи энергии. Кроме того, устройство 24 может обеспечивать выполнение проверок последовательностей безопасности. Если посредством устройства 24 на основании прекращения подачи энергии, нарушения последовательности безопасности или другого заранее определенного события принято решение о том, что должно быть выполнено переключение в режим спасательной операции, то устройство 24 через шину 34 посылает соответствующее сообщение. В качестве реакции на этот сигнал, указывающей на переключение в режим спасательной операции, лифтовая система и, в частности, устройство 8, оказывается отсоединенной от блока 6 электропитания. Начинает осуществляться режим спасательной операции с использованием электрической энергии, запасенной в аккумуляторе 22 спасательного устройства 16 и в аккумуляторе 30 пульта 26 управления. Это отсоединение гарантирует, что во время спасательной операции не случится никаких нежелательных эффектов, вызванных несовместимостью электропитания. Следует отметить, что сообщение, указывающее на прекращение подачи энергии, и/или на нарушение последовательности безопасности, и/или на другое заранее определенное событие, может быть выработано и распространено элементами лифтовой системы, отличными от устройства 24, если эти элементы выполнены с возможностью обнаружения таких событий.
В соответствии с вариантом реализации, описанным по Фиг.1, спасательная операция управляется посредством пульта 26 управления. Для этой цели пульт 26 управления содержит спасательный контроллер 27. Спасательный контроллер 27 снабжается электрической энергией посредством аккумулятора 30 пульта 26 управления. После того, как инициирован режим спасательной операции, спасательный контроллер 27 пульта 26 управления посылает сообщение в узловые точки указанной шины контроллерной сети о выключении соответствующих связанных устройств. Например, на датчик 10 скорости поступает инструкция не измерять скорость кабины лифта до поступления иной инструкции. Кроме того, пульт 26 управления приспособлен для питания шины 34, чтобы поддерживать функционирование сети для обмена данными. Указанная энергия подается посредством аккумулятора 30. Однако в в этот момент пульт 26 управления прекращает снабжение энергией маломощных устройств, которые не соединены с источником 6 электропитания и получают энергию через шину 34 также и в нормальном режиме эксплуатации, например датчик 10 скорости. В соответствии с вариантом реализации, показанном на Фиг.1, передающий канал 32 между спасательным устройством 16 и пультом 26 управления по-прежнему поддерживается, т.е. контроллер 18 переключателя по-прежнему снабжается энергией от аккумулятора 30 пульта 26 управления. Таким образом обеспечено, что контроллер 18 переключателя спасательного устройства 16 поддерживает переключатель 20 открытым, так что тормоз 4 остается задействованным, что передается в пульт 26 управления. Вследствие этого любое движение кабины лифта запрещено до тех пор, пока специалист по обслуживанию лифта вручную не приведет в действие спасательный переключатель 28 пульта 26 управления.
В соответствии с одним из вариантов реализации, спасательный переключатель 28 имеет три позиции: позицию нормального режима эксплуатации, позицию режима спасательной операции и позицию остановки. Спасательный переключатель 28 приводят в действие вручную. Поскольку для нормального режима эксплуатации лифтовой системы требуется, чтобы спасательный переключатель находился в позиции нормального режима, указанный спасательный переключатель по-прежнему установлен в позицию нормального режима эксплуатации, когда специалист по обслуживанию лифта получает доступ к пульту 26 управления для выполнения спасательной операции. Специалист по обслуживанию лифта переключает спасательный переключатель 28 в позицию режима спасательной операции с целью начала процесса перемещения кабины лифта в положение для безопасной высадки пассажиров. В ответ на указанное приведение в действие спасательного переключателя 28 спасательный контроллер 27 пульта 26 управления посылает сигнал для приведения в действие через шину 34 на все устройства, которые участвуют в текущей спасательной операции. В соответствии с данным вариантом реализации, спасательное устройство 16, датчик 12 зоны дверей и датчик 14 превышения скорости приводятся в действие и обеспечиваются питанием от аккумулятора 30 через шину 34 для обеспечения возможности их работы.
Затем кабина лифта перемещается в положение для безопасной высадки пассажиров следующим образом. Спасательный контроллер 27 пульта 26 управления посылает сообщение в контроллер 18 переключателя спасательного устройства 16 с целью отпускания тормоза 4. В ответ контроллер 18 переключателя закрывает переключатель 20, так что тормоз 4 снабжается электрической энергией от аккумулятора 22. В случае, если имеется существенная разница в весе между кабиной лифта и противовесом, кабина лифта и противовес начинают движение. Направление движения зависит от того, какой из элементов - противовес или кабина лифта, включающая нагрузку/пассажиров, - является более тяжелым. В качестве примера допустим, что противовес является более тяжелым, чем кабина лифта, несущая малую нагрузку, например одного пассажира. В этом случае при выключении тормоза 4 кабина лифта начинает движение вверх вследствие того, что противовес является более тяжелым. Из практических соображений ближайшая к текущему положению кабины лифта посадочная площадка в восходящем направлении выбирается в качестве положения для высадки пассажиров.
При нахождении тормоза 4 в отпущенном состоянии кабина лифта продолжает ускоряться. Скорость кабины лифта отслеживается посредством датчика 14 превышения скорости. Когда кабина лифта достигает критической скорости, датчик 14 превышения скорости посылает сообщение в пульт 26 управления через шину 34. В контексте спасательной операции указанная критическая скорость может быть определена как максимальная скорость кабины лифта, которая еще позволяет резкую остановку кабины лифта без каких-либо потенциально опасных эффектов для пассажиров. В соответствии с этим сообщением от датчика 14 превышения скорости спасательный контроллер 27 пульта 26 управления вырабатывает для указанного спасательного устройства сообщение, указывающее на то, что снова надо задействовать тормоз 4. В ответ на это контроллер 18 переключателя открывает переключатель 20, так что электропитание, подаваемое от аккумулятора 22 на тормоз 4, оказывается прерванным. В результате задействуется тормоз 4, и кабина лифта останавливается. Затем датчик 14 превышения скорости указывает в сообщении на пульт 26 управления, что скорость кабины лифта упала ниже критической скорости. Вследствие этого спасательный контроллер 27 пульта 26 управления посылает в спасательное устройство 16 через шину 34 сообщение, указывающее/ что тормоз 4 вновь должен быть отпущен. Соответственно, кабина лифта пройдет через цикл, включающий ускорение указанной кабины посредством разницы весов указанной кабины лифта и противовеса, и остановку указанной кабины посредством приведения в действие тормоза 4. С течением времени скорость кабины лифта будет следовать пилообразной функции, повторяющимся образом демонстрируя заметное линейное увеличение скорости до достижения ею критического значения и по существу немедленную остановку кабины лифта.
Этот периодически повторяющийся шаблон движения изменяется в данном вариантом реализации, когда кабина лифта приближается к положению для высадки пассажиров. Когда датчик 12 зоны дверей обнаруживает кабину лифта вблизи площадки для высадки пассажиров на требуемом этаже, указанный датчик посылает соответствующее сообщение в пульт 26 управления через шину 34. В ответ спасательный контроллер 27 пульта 26 управления посылает сообщение в спасательное устройство 16 с инструкцией контроллеру 18 переключателя закрыть переключатель 20, затем удерживать переключатель 20 открытым в течение короткого промежутка времени и затем вновь открыть переключатель 20, чтобы таким образом тормоз 4 отпускался на короткий промежуток времени только перед новым включением. Затем спасательный контроллер 27 пульта 26 управления ожидает обновленных данных от датчика 12 зоны дверей, определяющего текущее расстояние от пола кабины лифта до указанного этажа высадки. В зависимости от этого расстояния спасательный контроллер 27 запрашивает от указанного спасательного устройства интервалы движения кабины лифта, достаточно короткие, чтобы кабина лифта не прошла мимо заданного положения. Спасательный алгоритм, выполняемый в спасательном контроллере 27 пульта 26 управления, выполнен с возможностью реагирования на расстояние между полом кабины лифта и заданным положением для высадки пассажиров, которое отображается посредством датчика 12 зоны дверей, так что возможна точная остановка кабины лифта у площадки для высадки на желаемом этаже. Кроме того, это позволяет осуществлять безопасную высадку пассажиров с ограниченными возможностями, находящихся в инвалидных колясках.
Управление спасательной операцией, выполняемой посредством спасательного контроллера 27 пульта 26 управления, может осуществляться различными способами. Независимо от конкретного алгоритма формируют контур управления, в котором спасательный контроллер 27 пульта 26 управления принимает сообщения о состоянии кабины лифта через шину 34, например от датчика 12 зоны дверей и датчика 14 превышения скорости, и посылает управляющие сообщения в спасательное устройство 16. Конкретный алгоритм спасательной операции может зависеть от устройств, имеющихся во время спасательной операции, а также от кокретной конфигурации этих устройств. Например, во время спасательной операции может быть приведен в действие и использован датчик 10 скорости. В этом случае датчик 10 скорости периодически передает информацию о скорости кабины лифта на пульт 26 управления через шину 34. Так как спасательному контроллеру 27 пульта 26 управления доступно больше информации, чем предоставляет датчик 14 превышения скорости, который поставляет только бинарную часть информации (превышена критическая скорость или нет), то есть множество возможностей для разработки управляющего алгоритма спасательной операции. В частности, спасательным контроллером 27 пульта 26 управления может быть заранее вычислена ожидаемая скорость кабины лифта, и могут быть предприняты меры предупредительного управления. Это особенно предпочтительно, когда переключатель 20 спасательного устройства 16 представляет собой не простой переключатель «включено-выключено», а допускает по меньшей мере одно промежуточное состояние. Такое промежуточное состояние, вызванное конкретным управляющим сигналом контроллера 18 переключателя, приводит к подаче части максимально возможной энергии от аккумулятора 22 на тормоз 4, что в свою очередь приводит к частичному отпусканию тормоза 4. Другими словами, тормоз 4 будет задействован на часть от его максимального тормозного усилия. Таким образом, может быть достигнуто несколько темпов ускорения/торможения. Наличие датчика 10 скорости при спасательной операции и/или наличие переключателя 20, имеющего по меньшей мере одно состояние, отличное от состояний «включено» и «выключено», делает возможным более детальное управление спасательной операцией и обеспечивает более однородное движение кабины лифта во время спасательной операции.
До сих пор спасательная операция описывалась как процесс, запускаемый ручным управлением спасательного переключателя 28 и имеющий последующее машинное управление. Это предпочтительно, так как спасательную операцию могут проводить не только высококвалифицированные специалисты по обслуживанию лифтов, но и практически любой человек, например управляющий объектом, постоянно находящийся в здании, В соответствии с другими вариантами реализации, управляющий алгоритм, выполняемый спасательным контроллером 27 пульта 26 управления, может поддерживать ручной контроль. С этой целью спасательный переключатель 28 может быть установлен в позицию остановки. Установление спасательного переключателя 28 в соответствующую позицию приводит к выработки спасательным контроллером 27 пульта 26 управления сообщения, которое будет послано в контроллер 18 переключателя спасательного устройства 16 через шину 34 с целью открывания переключателя 20. Для того, чтобы специалист по обслуживанию лифта, вручную выполняющий управление спасательным переключателем 28, принял обоснованное решение, пульт 26 управления может быть оснащен дисплеем, на котором специалисту по обслуживанию лифта показываются данные о состоянии кабины лифта. Такие данные, например, могут быть получены датчиком 10 скорости, и/или датчиком 12 зоны дверей, и/или датчиком 14 превышения скорости. Такой дисплей может представлять собой матрицу светоизлучающих диодов, или жидкокристаллический экран, или любое другое средство, пригодное для передачи пользователю информации о состоянии кабины лифта. Соответственно, специалист по обслуживанию лифта может по своему усмотрению блокировать спасательный алгоритм, выполняемый спасательным контроллером 27 пульта 26 управления. Например, это позволяет специалисту по обслуживанию лифта выполнять торможение кабины лифта при более низкой скорости, чем это было бы при автоматическом управлении, что может быть предпочтительно, когда в кабине лифта перевозится такой высокочувствительный груз, как пациент в больнице.
В соответствии с одним из вариантом реализации, между спасательным устройством 16 и пультом 26 управления может быть установлен постоянный обмен проверочными сообщениями. Этот постоянный обмен указывает каждому из указанных двух устройств на то, что соответствующее другое устройство по-прежнему работает и готово к приему и обработке сообщений и/или данных, вводимых пользователем. С одной стороны, контроллер 18 переключателя спасательного устройства 16 имеет информацию о том, что любое управляющее сообщение от пульта 26 управления, вызванное либо действием ручного спасательного переключателя 28, либо сообщением от датчика 10 скорости, или от датчика 12 зоны дверей, или от датчика 14 превышения скорости, благополучно достигнет спасательного устройства 16. С другой стороны, спасательный контроллер 27 пульта 26 управления имеет информацию о том, что контроллер 18 переключателя спасательного устройства 16 сможет быстро отреагировать на управляющие сообщения, присланные через шину 34. Эти проверочные сообщения могут содержать метку времени для контроля времени запаздывания связи, вносимого передачей сообщения через шину 34. Строгие требования по времени ожидания для этих проверочных сообщений могут обеспечивать выполнение спасательной операции только при обеспечении своевременной реакции на ввод данных пользователем или на обновленную информацию о состоянии кабины лифта. Указанный постоянный обмен проверочными сообщениями может быть распространен на другие устройства, ответственные за безопасность пассажиров в ходе спасательной операции, например на датчик 14 превышения скорости. Протокол сети для обмена данными, в частности протокол контроллерной сети, может обеспечивать такие проверочные сообщения и требования по времени ожидания. При отсутствии положительных результатов перекрестной проверки устройств, ответственных за безопасность, контроллер 18 переключателя спасательного устройства 16 открывает переключатель 20 с целью включения тормоза 4. Это решение может быть принято самим контроллером 18 переключателя или инициировано посредством соответствующего сообщения от спасательного контроллера 27 пульта 26 управления. Когда будет вновь выполнен своевременный обмен проверочными сообщениями, спасательная операция может быть продолжена.
В соответствии с другим вариантом реализации, управление спасательной операцией может осуществляться посредством спасательного контроллера, содержащегося в спасательном устройстве 16. Этот альтернативный спасательный контроллер и контроллер 18 переключателя могут формировать один управляющий модуль или могут быть сформированы как отдельные объекты, выполненные с возможностью обмена информацией. Это означает, что сообщения от датчика 10 скорости, и/или датчика 12 зоны дверей, и/или датчика 14 превышения скорости получает спасательное устройство 16 и что альтернативный спасательный контроллер определяет управляющую информацию для переключателя 20, основанную на этих сообщениях. От пульта управления в спасательное устройство 16 передаются только данные о состоянии ручного спасательного переключателя 28. Кроме того, шина 34 может быть снабжена электропитанием посредством аккумулятора 22 спасательного устройства 16 согласно соответствующей схеме. Также и пульт 26 управления может быть снабжен электропитанием посредством аккумулятора 22 через шину 34 с целью определения позиции спасательного переключателя 28 и передачи этой информации в спасательное устройство 16. В этом случае пульт 26 управления не нуждается в оснащении аккумулятором, так что вся энергия, используемая в спасательной операции, может быть обеспечена посредством только аккумулятора 22 спасательного устройства 16. Между началом аварийной ситуации и ручным установлением спасательного переключателя 28 в позицию режима спасательной операции спасательное устройство 16 может удерживать пульт 26 управления приведенным в действие, а также поддерживать постоянный обмен проверочными сообщениями с пультом 26 управления через шину 34 для подтверждения того, что ручное установление спасательного переключателя 28 своевременно передается в спасательное устройство 16. Затем посредством спасательного контроллера спасательного устройства 16 может быть выполнен спасательный алгоритм.
Как указано выше, отпускания тормоза 4 может оказаться недостаточно для того, чтобы начать движение кабины лифта в ситуации, когда кабина лифта, включающая нагрузку, и противовес имеют по существу одинаковую массу. Для того, чтобы все еще можно было выполнить спасательную операцию, аккумулятор 22 спасательного устройства 16 может быть соединен с приводом 2 или с другим приводом через второй переключатель спасательного устройства 16. Этот второй переключатель также может управляться контроллером 18 переключателя, который в свою очередь управляется посредством сообщений, управляющих спасательной операцией, например вырабатываемых спасательным контроллером 27 пульта 26 управления и передаваемых через шину 34. Таким образом, привод 2/другой привод и тормоз 4 могут работать совместно с целью перемещения кабины лифта в положение для безопасной высадки пассажиров. Датчик массы кабины лифта может быть использован как средство для обозначения этой ситуации равенства по массе. Кроме того, выходной сигнал от датчика 10 скорости, показывающий приблизительно нулевую скорость кабины лифта после истечения нормального времени, в течение которого кабина лифта обычно начинает движение после отпускания тормоза, может быть использован в качестве индикатора такой ситуации.
Ниже описано расположение элементов лифтовой системы согласно Фиг.1. Во многих лифтовых установках привод 2 и тормоз 4 расположены в верхней части лифтовой системы. Например, они могут быть расположены в машинном помещении, которое расположено над шахтой лифта. В лифтовой системе, не имеющей машинного помещения, привод 2 и тормоз 4 могут быть расположены в верхнем пространстве шахты лифта, причем указанное верхнее пространство определено как пространство между верхней поверхностью кабины лифта в ее самом верхнем рабочем положении и потолком шахты лифта. Привод 2 может быть соединен по меньшей мере с одним канатоведущим шкивом посредством приводного вала, причем по меньшей мере один такой канатоведущий шкив выполнен с возможностью взаимодействия по меньшей мере с одним подвесом с целью приведения в движение кабины лифта и противовеса, причем на указанном подвесе подвешены как кабина лифта, так и противовес. Тормоз 4 также может быть соединен с указанным приводным валом, причем указанный тормоз выполнен с возможностью остановки вращения указанного приводного вала и таким образом торможения кабины лифта. В такой лифтовой системе, не имеющей машинного помещения, спасательное устройство 16 также может быть расположено в верхнем пространстве шахты лифта. Это обеспечивает очень малое расстояние между аккумулятором 22 и тормозом 4. Поскольку для приведения в движение электромагнитного тормоза необходимо большое количество электроэнергии, короткое расстояние между аккумулятором 22 и тормозом 4 снижает потери, связанные с передачей энергии во время спасательной операции. Это, в свою очередь, позволяет использовать сравнительно небольшой аккумулятор 22, который легче, меньше по размеру, дешевле и который легче разместить в указанном верхнем пространстве. Пульт 26 управления может быть расположен в любом месте, легко доступном для специалиста по обслуживанию лифта, который начинает спасательную операцию и осуществляет надзор за ней. Например, пульт 26 управления может быть связан с панелью вызова лифта на первом этаже здания. Однако пульт 26 управления может быть расположен за запертой дверью. В соответствии с другим вариантом реализации, пульт 26 управления расположен в комнате управляющего объектом, расположенной на первом этаже или в подвале здания.
Вышеописанные варианты реализации изобретения позволяют проводить в высшей степени энергоэффективную спасательную операцию, которую специалист по обслуживанию лифта может начать и контролировать с легкодоступного места. Благодаря непосредственной близости между указанным спасательным источником электропитания и указанной тормозной системой возможно поддерживать на низком уровне потери электроэнергии, связанные с передачей электроэнергии между ними. Этот энергосберегающий эффект оказывается особенно существенным, поскольку обычно используемые в лифтах электромагнитные тормоза представляют собой устройства большой мощности, требующие большого количества электроэнергии, передаваемой им каждый раз, когда они задействуются. Кроме того, в процессе обычной спасательной операции тормоз постоянно отпускается и повторно приводится в действие, что приводит к частым случаям передачи энергии. Поскольку поддержание передающего канала для передачи сигнала, соответствующего режиму спасательной операции, между спасательным устройством и пультом управления допускает дистанционное управление спасательной операцией, возможен свободный выбор места расположения спасательного устройства с целью минимизации потерь, связанных с передачей энергии во время спасательной операции. Доступность спасательного устройства не следует рассматривать в качестве критерия конструирования. Кроме того, пульт управления, который может действовать как обыкновенное дистанционное управляющее устройство для спасательного устройства, может быть выполнен небольших размеров и расположен практически в любом месте, которое считается легкодоступным в аварийной ситуации.
Что касается характеристики, касающейся расположения спасательного устройства вблизи тормозной системы лифта, термин «вблизи» следует рассматривать в геометрическом смысле или в электрическом смысле. В
геометрическом смысле термин «вблизи» следует понимать как описывающий расстояние, охватывающее менее 50% этажей лифтовой системы, в отдельных случаях менее 25% этажей указанной лифтовой системы. В этом контексте можно учитывать все этажи указанной лифтовой системы. В другом случае в расчет могут быть приняты только первый этаж и все этажи над ним, т.е. все этажи, за исключением посадочных площадок на подвальных этажах. Тормозная система и спасательное устройство могут быть расположены на одном этаже, в частности фактически на одной высоте. По горизонтали тормоз и спасательное устройство не могут быть разделены расстоянием, большим самого большого горизонтального уширения шахты лифта, например диагонали шахты с квадратным сечением. В электрическом смысле термин «вблизи» следует понимать как описывающий электрические потери, связанные с передачей энергии от источника электропитания в тормозную систему. В этом электрическом контексте термин «вблизи» следует применять в отношении устройства, когда потери в линии электропитания между источником электропитания и тормозной системой уменьшены более чем на 50%, в отдельных случаях более чем на 75%, по сравнению с вариантом расположения источника электропитания на первом этаже здания, а тормозной системы фактически в верхней части шахты лифта. Для правильного сравнения можно предполагать идентичные кабели, рассматривая потери при передаче электроэнергии. Ниже, с целью иллюстрации высокого потенциала энергосбережения, связанного с таким близким расположением источника электропитания и тормозной системы, представлен численный пример. Здание может иметь 10 этажей, при этом длина кабеля между первым этажом и верхней частью шахты лифта составляет 50 м. Тормоз может потреблять 250 Вт. Напряжение, подаваемой источником электропитания, может составлять 48 В. Соответственно, сила тока в тормозной системе составляет более чем 5,2 А (из-за потерь при передаче). При таких высоких значениях силы тока уменьшение длины кабеля имеет очень заметный эффект в плане энергосбережения. По аналогии, термин «удаленно» можно понимать как относящийся к расстоянию, покрывающему более чем 50% этажей лифтовой системы, в частности более чем 75% этажей и в частности по существу все этажи лифтовой системы. И в этом случае принятые в расчет этажи лифтовой системы могут включать или исключать подвальные этажи.
Следует отметить, что спасательная лифтовая система представляет собой часть лифтовой системы. По существу спасательная лифтовая система может содержать устройства, которые не используются в нормальном режиме работы лифта, также как и устройства, применяемые в этом режиме. Другими словами, использование конкретной части лифтовой системы в нормальном режиме эксплуатации лифта не исключает того, что эта часть может быть частью спасательной лифтовой системы. Кроме того, части спасательной лифтовой системы могут иметь функциональную возможность их применения не только в спасательной операции. Например, пульт управления может иметь функции, обычно относящиеся к так называемому пульту технического обслуживания, например функцию тестирования тормозов лифтовой системы.
В соответствии с другим вариантом реализации изобретения передающий канал для передачи сигнала, соответствующего режиму спасательной операции, является частью лифтовой управляющей сети для обмена данными, содержащей узловые точки. Современные лифтовые установки содержат сеть, используемую для сбора информации, необходимой для управления лифтом, а также используемую для распространения информации о состоянии лифта, например с целью ее вывода на дисплей для пользователя/пассажира. Следовательно, передающий канал, являющийся частью этой лифтовой управляющей сети для обмена данными, предусматривает использование существующих ресурсов для осуществления связи между пультом управления и спасательным устройством во время спасательной операции. Вследствие этого спасательная лифтовая система не должна содержать инфраструктуры для обмена данными, специально предназначенной для спасательной операции. В этой лифтовой управляющей сети для обмена данными передающий канал может быть прямым каналом между двумя узловыми точками. Однако сообщения о ходе спасательной операции могут быть направлены по меньшей мере через одну промежуточную узловую точку, так что такой передающий канал содержит несколько подветвей. Лифтовая управляющая сеть для обмена данными может представлять собой проводную или беспроводную сеть для обмена данными.
Лифтовая управляющая сеть для обмена данными может содержать шину контроллерной сети, причем передающий канал для передачи сигнала, соответствующего режиму спасательной операции, является частью указанной шины. Стандарт указанной шины обеспечивает четко определенный набор протоколов связи. Однако возможны расширения к этим протоколам. Вследствие этого лифтовая управляющая сеть для обмена данными, содержащая указанную шину, имеет то преимущество, что она обеспечивает средства, позволяющие использовать для обмена данными во время спасательной операции существующую надежную структуру и эффективно использовать существующие ресурсы.
В соответствии с другим вариантом реализации спасательная лифтовая система выполнена с возможностью подачи электропитания для маломощных устройств через лифтовую управляющую сеть для обмена данными. Это позволяет использовать во время спасательной операции без необходимости оснащения индивидуальными источниками электропитания множество устройств, например датчик превышения скорости. Соответственно во всей лифтовой системе для спасательной операции можно использовать небольшое количество аккумуляторов, что является преимуществом с точки зрения надежности, обслуживания и стоимости. К маломощным устройствам в общем можно отнести все устройства, не связанные с перемещением кабины лифта, т.е. все устройства за исключением привода лифта и тормоза лифта, требующих большого количества электроэнергии. К маломощным устройствам относятся, например, все электронные устройства, такие как блоки управления, датчики и дисплейные устройства.
В соответствии с еще одним вариантом реализации, спасательная лифтовая система выполнена с возможностью деактивации узловых точек лифтовой управляющей сети для обмена данными, не связанных с устройствами, участвующими в спасательной операции. Таким образом, указанная сеть для обмена данными может быть сокращена до участников, имеющих отношение к спасательной операции, что приводит к менее энергоемкой работе указанной сети во время спасательной операции, что в свою очередь позволяет использовать аккумуляторы уменьшенных размеров. Указанная деактивация может быть выполнена посредством управляющих сообщений программного обеспечения. В другом случае указанная деактивация может выполняться посредством аппаратного обеспечения, причем центральная узловая точка, отсоединяющая каналы от устройств, не участвует в спасательной операции, когда лифтовая управляющая сеть для обмена данными организована в топологии типа «звезда».
Кроме того, возможна ситуация, когда спасательная лифтовая система выполнена с возможностью сокращения лифтовой управляющей сети для обмена данными до передающего канала для передачи сигнала, соответствующего режиму спасательной операции, до тех пор, пока не будет приведен в действие ручной переключатель для переключения в режим спасательной операции. Поскольку активацию и деактивацию конкретных узловых точек сети для обмена данными можно настроить на основе адаптивного подхода, возможна дополнительная экономия энергии благодаря обеспечению соединения только между пультом управления и спасательным устройством на период между началом аварийной ситуации и фактическим началом спасательной операции, запускаемой посредством приведения в действие ручного переключателя для переключения в режим спасательной операции.
В соответствии с еще одним вариантом реализации, спасательная лифтовая система выполнена с возможностью передачи информации о состоянии ручного переключателя для переключения в режим спасательной операции через передающий канал для передачи сигнала, соответствующего режиму спасательной операции. Это позволяет сосредоточить весь контроль за спасательной операцией в спасательном устройстве, что приводит к очень низкой информационной нагрузке на передающий канал, так как от пульта управления в спасательное устройство требуется передавать только одну часть всей информации.
В соответствии с еще одним вариантом реализации, спасательная лифтовая система содержит датчик скорости кабины лифта и/или датчик положения кабины лифта для определения состояния кабины лифта, причем указанное состояние включает информацию о скорости кабины лифта и/или информацию о положении кабины лифта. Сбор информации о состоянии кабины лифта предусматривает проверку того, приводит ли управление спасательной операцией к требуемым характеристикам кабины лифта. Таким образом, реализуется контур управления. Однако возможна ситуация, когда достаточная информация о состоянии кабины лифта, например информация о точном положении и вес, становится известной в момент возникновения аварийной ситуации, и когда выработывается последовательность команд для выполнения спасательной операции, что приводит к достижению кабиной лифта положения для безопасной высадки пассажиров без потребности в контуре управления. Несмотря на то, что это возможно, использование контура управления имеет то преимущество, что требования к используемым устройствам по точности и синхронизации не столь строги.
Спасательная лифтовая система может быть выполнена с возможностью передачи информации о состоянии кабины лифта через лифтовую управляющую сеть для обмена данными.
В соответствии с еще одним вариантом реализации, спасательная лифтовая система содержит контроллер, выполненный с возможностью определения управляющего сигнала для управления торможением на основании состояния кабины лифта и состояния ручного переключателя для переключения в режим спасательной операции. Указанный контроллер принимает данные обратной связи о результатах действия его управляющих сигналов и может соответствующим образом настраивать эти управляющие сигналы. Таким образом обеспечивается надежное, безопасное и эффективное перемещение кабины лифта в положение для высадки пассажиров. Указанный контроллер может быть связан с пультом управления или со спасательным устройством. Соответственно, количество устройств, обменивающихся данными через лифтовую управляющую сеть для обмена данными во время спасательной операции, поддерживается на низком уровне. Однако указанный контроллер может быть расположен в месте, отличном от пульта управления или спасательного устройства. Спасательная лифтовая система может быть выполнена с возможностью приведения в действие тормоза в соответствии с управляющим сигналом для управления торможением посредством энергии, подаваемой спасательным источником электропитания.
В соответствии с еще одним вариантом реализации, указанный контроллер выполнен с возможностью автоматического определения управляющего сигнала для управления торможением при приведении указанного ручного индикаторного переключателя для переключения в режим спасательной операции в состояние, соответствующее режиму спасательной операции. Следовательно, не требуется ручного включения и выключения тормоза. Специалист, выполняющий спасательную операцию, лишь один раз включает ручной переключатель для переключения в режим спасательной операции, а последующая часть спасательной операции выполняется посредством управляющего алгоритма, например управляющего алгоритма, встроенного в программное обеспечение. Для выполнения спасательной операции указанный контроллер может полагаться на информацию о состоянии кабины лифта. Такая информация о состоянии может быть предоставлена датчиком скорости кабины лифта и/или датчиком положения кабины лифта.
Следует отметить, что термин «спасательная операция», используемый в настоящем описании изобретения, относится к операции, продолжающейся с момента аварийной остановки кабины лифта до момента ее прибытия в положение для безопасной высадки пассажиров. Кроме того, указанная сеть для обмена данными может обеспечивать обмен информацией через коммуникационные протоколы. Часть коммуникационных протоколов, например функция доступа, могут быть встроены в узловые точки указанных сетей. Термин «контроллер» не следует понимать как управляющее устройство в ограниченном смысле. Его следует понимать как совокупность компьютерных функций для целей управления. Указанные вычислительные функции могут быть распределены в указанной сети для обмена данными, например во вспомогательных контроллерах, которые обмениваются данными друг с другом и могут быть связаны с различными узловыми точками указанной сети для обмена данными. Кроме того, указанные вычислительные функции указанных узловых точек могут быть использованы для полного или частичного выполнения управляющего алгоритма.
В соответствии с еще одним вариантом реализации, спасательная лифтовая система выполнена с возможностью установления постоянного обмена информацией между спасательным устройством и пультом управления. Указанный постоянный обмен информацией может включать функцию проверочных сообщений для обеспечения безошибочной работы передающего канала для передачи сигнала, соответствующего режиму спасательной операции.
Спасательная лифтовая система может быть установлена в лифтовой системе, не имеющей машинного отделения.
Признаки и преимущества, описанные в связи с указанной спасательной лифтовой системой, также применимы к способу перемещения кабины лифта в положение для высадки пассажиров в процессе спасательной операции. Поэтому подробное описание дополнительных вариантов реализации указанного способа опущены для краткости.
Хотя настоящее изобретение описано со ссылками на различные варианты реализации, для специалиста очевидно, что возможны различные изменения и замена различных элементов на эквивалентные без отступления от объема настоящего изобретения. Кроме того, следует отметить, что возможны различные модификации для адаптации конкретных ситуаций к идеи изобретения без отступления от объема и сущности настоящего изобретения. Поэтому следует считать, что настоящее изобретение не ограничивается конкретными вариантами реализации, раскрытыми в настоящем описании, а включает все варианты реализации, находящиеся в пределах объема прилагаемой формулы изобретения.
Изобретение относится к области обеспечения безопасности при эксплуатации лифтовой установки. При перемещении кабины лифта до положения для высадки пассажиров во время спасательной операции устанавливают передающий канал (32) для передачи сигнала, соответствующего режиму спасательной операции, между спасательным устройством (16) и пультом (26) управления. Запускают спасательную операцию при получении сигнала от указанного ручного индикаторного переключателя (28) для переключения в режим спасательной операции, выполненного с возможностью индикации команды на запуск спасательной операции. Спасательное устройство (16) соединено с тормозной системой (4) лифта и содержит спасательный источник (22) питания. Спасательное устройство (16) расположено вблизи тормозной системы (4) лифта, пульт (26) управления содержит ручной переключатель (28) для переключения в режим спасательной операции и расположен удаленно по отношению к спасательному устройству (16). Достигается повышение безопасности. 3 н. и 21 з.п. ф-лы, 1 ил.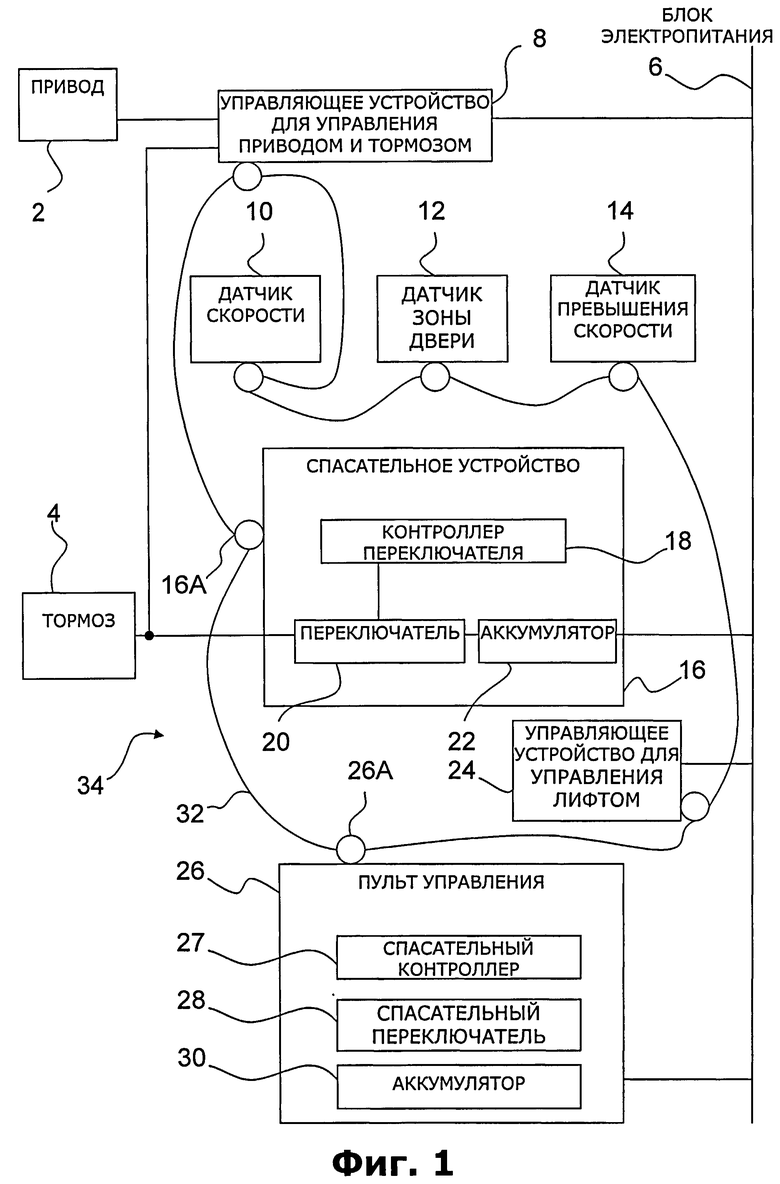
1. Спасательная лифтовая система для перемещения кабины лифта в положение для высадки пассажиров во время спасательной операции, содержащая:
спасательное устройство (16), соединенное с тормозной системой (4) лифта, содержащее спасательный источник (22) питания и расположенное вблизи тормозной системы (4) лифта;
пульт (26) управления, содержащий ручной переключатель (28) для переключения в режим спасательной операции и расположенный удаленно по отношению к спасательному устройству (16); и
передающий канал (32) для передачи сигнала, соответствующего режиму спасательной операции, между спасательным устройством (16) и пультом (26) управления.
2. Система по п.1, в которой передающий канал (32) представляет собой часть лифтовой управляющей сети (34) для обмена данными, содержащей узловые точки.
3. Система по п.2, в которой лифтовая управляющая сеть (34) для обмена данными содержит шину контроллерной сети, а передающий канал (32) является частью указанной шины.
4. Система по п.2, выполненная с возможностью подачи электропитания на маломощные устройства через лифтовую управляющую сеть (34) для обмена данными.
5. Система по п.2, выполненная с возможностью отключения узлов лифтовой управляющей сети (34) для обмена данными, не связанных с устройствами, используемыми в спасательной операции.
6. Система по п.2, выполненная с возможностью сокращения лифтовой управляющей сети (34) для обмена данными до передающего канала (32), пока не приведен в действие указанный ручной переключатель (28).
7. Система по п.1, выполненная с возможностью передачи информации о состоянии указанного ручного переключателя (28) через передающий канал (32).
8. Система по п.1, дополнительно содержащая датчик (10) скорости кабины лифта и/или датчик (12) положения кабины лифта для определения ее состояния, включающего информацию о скорости кабины лифта и/или информацию о положении кабины лифта.
9. Система по п.8, выполненная с возможностью передачи информации о состоянии кабины лифта через лифтовую управляющую сеть (34) для обмена данными.
10. Система по п.1, дополнительно содержащая контроллер (27), выполненный с возможностью определения управляющего сигнала для управления торможением на основании состояния кабины лифта и состояния указанного ручного переключателя (28).
11. Система по п.10, в которой контроллер (27) связан с пультом (26) управления или со спасательным устройством (16).
12. Система по п.10 или 11, выполненная с возможностью приведения в действие тормоза (4) в соответствии с указанным управляющим сигналом при подаче электропитания от спасательного источника (22) питания.
13. Система по п.10, в которой контроллер (27) выполнен с возможностью автоматического определения указанного управляющего сигнала при приведении указанного ручного индикаторного переключателя (28) для переключения в режим спасательной операции в состояние, соответствующее режиму спасательной операции.
14. Система по п.1, выполненная с возможностью установления постоянного обмена информацией между спасательным устройством (16) и пультом (26) управления.
15. Система по п.14, в которой указанный постоянный обмен информацией включает направление проверочных сообщений для проверки функциональности для обеспечения безошибочной работы передающего канала (32).
16. Система по п.1, в которой спасательный источник (22) питания выполнен с возможностью подачи электропитания, требуемого спасательной лифтовой системе во время спасательной операции.
17. Система по п.1, в которой пульт (26) управления содержит источник (30) питания, причем спасательный источник (22) питания и источник (30) питания пульта управления выполнены с возможностью совместной подачи электропитания, требуемого спасательной лифтовой системе во время спасательной операции.
18. Лифтовая система без машинного помещения, которая содержит спасательную лифтовую систему по любому из пп.1-17.
19. Способ перемещения кабины лифта до положения для высадки пассажиров во время спасательной операции, включающий установление передающего канала для передачи сигнала, соответствующего режиму спасательной операции, между спасательным устройством (16) и пультом (26) управления, причем спасательное устройство (16) соединено с тормозной системой (4) лифта и содержит спасательный источник (22) питания, спасательное устройство (16) расположено вблизи тормозной системы (4) лифта, пульт (26) управления содержит ручной переключатель (28) для переключения в режим спасательной операции и расположен удаленно по отношению к спасательному устройству (16), а способ дополнительно включает запуск спасательной операции при получении сигнала от указанного ручного индикаторного переключателя (28) для переключения в режим спасательной операции, выполненного с возможностью индикации команды на запуск спасательной операции.
20. Способ по п.19, в котором передающий канал (32) представляет собой часть лифтовой управляющей сети (34) для обмена данными, содержащей узловые точки.
21. Способ по п.19 или 20, дополнительно включающий выработку управляющего сигнала для управления торможением для выполнения спасательной операции, причем эту выработку обеспечивают автоматически посредством контроллера (27) после получения сигнала от указанного ручного индикаторного переключателя (28).
22. Способ по п.21, в котором контроллер соединен с лифтовой управляющей сетью (34) для обмена данными.
23. Способ по п.21, в котором выработку указанного управляющего сигнала обеспечивают в соответствии со спасательным алгоритмом, соответствующим состоянию кабины лифта.
24. Способ по п.21, в котором выработку указанного управляющего сигнала обеспечивают в соответствии со спасательным алгоритмом, соответствующим расстоянию между положением кабины лифта и положением для безопасной высадки пассажиров.
| АВАРИЙНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ЛИФТОВ, ЗАСТРЯВШИХ МЕЖДУ ЭТАЖАМИ | 2004 |
|
RU2341440C2 |
| ПОДЪЕМНИК И СПОСОБ СПАСАТЕЛЬНОЙ ОПЕРАЦИИ В ПОДЪЕМНО-ТРАНСПОРТНОМ ОБОРУДОВАНИИ (ВАРИАНТЫ) | 2003 |
|
RU2328438C2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

