Область техники
[0001] Настоящее изобретение относится к способу и устройству управления в инверторе для лифта для перемещения кабины лифта на соседний этаж с эффективным потреблением электроэнергии путем управления двигателем посредством использования аварийного источника питания, такого как источник бесперебойного питания (далее по тексту называемый ИБП, англ. UPS - uninterruptible power supply) или аккумулятор, во время отключения электроэнергии или потери мощности нормального источника входной мощности.
Предшествующий уровень техники
[0002] Инвертор для лифта наделяется функцией перемещения кабины лифта на соседний этаж, чтобы предотвратить застревание пассажира или пассажиров между этажами в кабине во время отключения электроэнергии путем приведения в движение двигателя с помощью аварийного источника питания или источника питания, такого как ИБП и аккумулятор.
[0003] В этой функции направление более легкой нагрузки (направление легкой нагрузки) определяют из нагрузки кабины лифта с помощью датчика крутящего момента или датчика нагрузки, и кабина лифта перемещается в направлении легкой нагрузки с вводом из контроллера команды на привод в этом направлении. Таким образом, секция управления системы уменьшает энергопотребление ИБП или аккумулятора. Эта более ранняя технология раскрыта в Патентном Документе 1 и Патентном Документе 2.
[0004] Фиг. 5 показывает конструкцию лифтовой системы, использующей инвертор, двигатель и датчик нагрузки в одном примере более ранней технологии. Лифтовая система на фиг. 5 включает в себя приводной двигатель 50 лифта и шкив 51, неподвижно установленный на валу 50а вращения двигателя 50.
[0005] Основной канат или трос 52 намотан на шкиве 51. Противовес 53 закреплен на одном конце основного каната 52. Кабина или клетка 54 лифта закреплена на другом конце основного каната 52. Датчик 55 нагрузки предусматривается на нижнем конце кабины 54 лифта.
[0006] Датчик угла поворота 56 прикреплен к валу 50а вращения двигателя 50 и служит для измерения скорости вращения и направления вращения.
[0007] Инвертор 60 принимает информацию о скорости и направлении вращения отдатчика угла поворота 56, преобразует электрическую мощность входного источника питания или аварийного источника питания, такого как ИБП или аккумулятор, не показанного на фиг. 5, до заданного напряжения и управляет вращением двигателя 50 путем применения фазы U, фазы V и фазы W двигателя 50.
[0008] Контроллер 70 осуществляет коммуникацию сигналов последовательности, относящихся к работе инвертора, с инвертором 60. Контроллер 70 выдает команду прямого движения (Вверх (вперед)) для движения вперед, команду обратного движения (Вниз (назад)) для движения назад, многоскоростную команду и т.п. на инвертор 60. Контроллер 70 принимает информацию о нагрузке отдатчика 55 нагрузки, а также различные выходные сигналы последовательности от инвертора 60.
[0009] Кроме того, предусматривается тормоз, как показано на фиг. 6, например, для механической остановки вала 50а вращения между двигателем 50 и шкивом 51 во время остановки лифта. Тормозная система на фиг. 6 включает в себя два набора электромагнитных тормозов (тормоз 31 и тормоз 32), как раскрыто в Патентном Документе 3. Основной канат 25 наматывается на шкив 23 подъемника и выполнен с возможностью навешивать кабину 26 и противовес 27. Шкив 23 соединен непосредственно с электродвигателем 22 через вал 24 вращения, и тормозное колесо 30 закреплено неподвижно на валу 24 вращения.
[0010] В момент остановки кабины 26 тормозные катушки 31b и 32b обесточиваются при открытии непоказанного средства управления тормозами, и тормозные колодки 31а и 32а с усилием прижимаются к тормозному колесу 30 с помощью соответствующих пружин, которые не показаны, для удержания неподвижным вала 24 вращения.
[0011] Для перемещения кабины 26 вверх или вниз непоказанное средство управления тормозами закрывается и, следовательно, тормозные катушки 31b и 32b питаются для притягивания соответствующих плунжеров 31с и 32с и тем самым втягивают тормозные колодки 31а и 32а, преодолевая действие пружин. Таким образом, тормозное колесо 30 отпускается и двигатель 22 приводится во вращение.
[0012] Система регулирования скорости двигателя в настоящем изобретении использует систему регулирования скорости, раскрытую в Патентном Документе 4.
Документы предшествующего уровня техники
Патентные Документы
[0013]
Патентный Документ 1:JP2006-82944A
Патентный Документ 2:JP2013-147328A
Патентный Документ 3:JP2001-268572A
Патентный Документ 4:JP5266799B2
Сущность изобретения
[0014] В случае привода с помощью ИБП или аккумулятора в качестве аварийного источника питания электроэнергия потребляется приводом электродвигателя для перемещения кабины лифта. Если мощность, накопленная в ИБП или аккумулятора меньше, чем мощность, потребляемая до прибытия и остановки на соседнем этаже, тогда кабина останавливается на полпути и пассажиры оказываются в ловушке вновь между этажами. Для предотвращения этого необходимо управление движением кабины для эффективного потребления электроэнергии.
[0015] В качестве части такой меры предусматривается система управления в соответствии с одним способом уменьшения потребления мощности двигателем путем измерения нагрузок кабины и противовеса и перемещения кабины в направлении легкой нагрузки.
[0016] В общей системе значения веса кабины и противовеса измеряют, например, с помощью датчика 55 нагрузки, показанного на фиг. 5, а результат измерения посылают на контроллер 70. Контроллер 70 принимает результат измерения и выдает команду движения в направлении легкой нагрузки на инвертор 60. Однако эта система управления является проблематичной в следующих пунктах.
Возрастает стоимость из-за установки датчика, и требуется пространство для установки датчика.
Движение может происходить в направлении тяжелой нагрузки из-за задержки работы контроллера, неправильной передачи контроллером команды движения вперед (Вверх (вперед)) или команды движения назад (Вниз (назад)) в результате возмущающих помех в сенсорном сигнале от датчика 55 нагрузки. В данном случае потребление мощности ИБП или аккумулятора становится больше и увеличивается риск застрять в неподвижной кабине между этажами.
[0017] Настоящее изобретение было разработано для решения вышеупомянутых проблем. Целью настоящего изобретения является разработка устройства и способа управления движением кабины лифта для обнаружения направления легкой нагрузки без применения датчика нагрузки и датчика крутящего момента и для перемещения кабины лифта на этаж в направлении легкой нагрузки, тем самым для уменьшения потребления мощности ИБП или аккумулятора во время отключения электроэнергии.
[0018] Для решения вышеупомянутых проблем устройство управления движением кабины лифта, как указано в п. 1 формулы, содержит: приводной двигатель лифта; шкив, неподвижно установленный на валу вращения приводного двигателя; основной канат, накрученный вокруг шкива и предназначенный для удержания противовеса на первом конце основного каната и кабины лифта на втором конце основного каната; тормоз для остановки вращения вала вращения двигателя; датчик угла поворота для измерения скорости вращения и направления вращения двигателя; инвертор, который имеет секцию управления, содержащую систему регулирования скорости, выполненную с возможностью определять команду крутящего момента по результату вычисления усилителя для регулирования скорости, выполняющего пропорционально-интегральное вычисление по отклонению между командой скорости и измеренной скоростью, и выполненный с возможностью управлять двигателем для изменения скорости в области скоростей, включающей область нулевой скорости, и предназначенный для преобразования мощности от одного из входного источника питания и аварийного источника питания и для подачи питания к двигателю; и контроллер для выполнения коммуникации сигналами последовательности, относящимися к работе инвертора, с инвертором,
упомянутый контроллер предусматривает функцию выполнения операции управления для переключения входа инвертора на аварийный источник питания во время отключения входного источника питания, функцию управления открытым/закрытым состоянием тормоза и функцию передачи сигнала последовательности многоскоростной команды на инвертор,
упомянутая секция управления инвертора предусматривает функцию регулирования нулевой скорости управлением системы регулирования скорости путем выполнения регулирования нулевой скорости системой регулирования скорости в открытом состоянии тормоза во время выхода из строя входного источника питания, секцию обнаружения направления легкой нагрузки для определения значения команды крутящего момента системы регулирования скорости во время выполнения регулирования нулевой скорости и для обнаружения направления легкой нагрузки двигателя, установленного с помощью весовой балансировки между кабиной лифта и противовесом, из направлений вращения двигателя, измеренных датчиком угла поворота, в соответствии с полярностью вычисленного значения команды крутящего момента, и функцию вычисления значения команды крутящего момента в соответствии с направлением вращения двигателя для обнаруженного направления легкой нагрузки и с сигналом последовательности многоскоростной команды от контроллера, и управление системой регулирования скорости с помощью вычисленного значения команды скорости в качестве команды скорости для системы регулирования скорости в открытом состоянии тормоза после того, как направление легкой нагрузки обнаруживают с помощью секции обнаружения направления легкой нагрузки.
[0019] Способ управления движением кабины лифта в устройстве, содержащем: приводной двигатель лифта; шкив, неподвижно установленный на валу вращения приводного двигателя; основной канат, намотанный на шкив и предназначенный для удержания противовеса на первом конце основного каната и кабины лифта на втором конце основного каната; тормоз для остановки вращения вала вращения двигателя; датчик угла поворота для измерения скорости вращения и направления вращения двигателя; инвертор, который содержит секцию управления, включающую в себя систему регулирования скорости, выполненную с возможностью определять команду крутящего момента по результату вычисления усилителя для регулирования скорости, выполняющего пропорционально-интегральное вычисление по отклонению между командой скорости и измеренной скоростью, и выполненный с возможностью управлять двигателем с целью изменения скорости, включая область нулевой скорости, и предназначенный для преобразования мощности от одного из входного источника питания и аварийного источника питания и для подачи питания на двигатель; и контроллер для выполнения коммуникации сигналами последовательности, относящимися к работе инвертора, с инвертором,
способ управления движением кабины лифта включает в себя:
шаг выполнения операции управления для переключения входа инвертора на аварийный источник питания во время выхода из строя входного источника питания с помощью контроллера; шаг передачи сигнала последовательности многоскоростной команды для нулевой скорости на инвертор с помощью контроллера; шаг управления тормозом для открытого состояния с помощью контроллера,
шаг выполнения регулирования нулевой скорости системы регулирования скорости при нулевой скорости в открытом состоянии тормоза во время выхода из строя входного источника питания с помощью секции управления инвертора,
шаг обнаружения направления легкой нагрузки по вычислению значения команды крутящего момента системы регулирования скорости во время выполнения регулирования нулевой скорости и обнаружения направления легкой нагрузки двигателя, установленного с помощью весовой балансировки между кабиной лифта и противовесом, из направлений вращения двигателя, измеренных датчиком угла поворота, в соответствии с полярностью вычисленного значения команды крутящего момента, с помощью секции обнаружения легкой нагрузки секции управления инвертора, шаг установки сигнала последовательности многоскоростной команды, подлежащего передаче на инвертор, на скорость, отличную от нулевой скорости, во время обнаружения направления легкой нагрузки двигателя посредством шага обнаружения направления легкой нагрузки, с помощью контроллера,
шаг вычисления значения команды скорости в соответствии с направлением вращения двигателя для направления легкой нагрузки и сигналом последовательности многоскоростной команды от контроллера; и управления системой регулирования скорости путем использования вычисленного значения команды скорости в качестве команды скорости для системы регулирования скорости, с помощью секции управления инвертора, в открытом состоянии тормоза после того, как направление легкой нагрузки обнаруживают на шаге обнаружения легкой нагрузки.
[0020] Когда регулирование нулевой скорости осуществляют в системе регулирования скорости вышеупомянутой системы, направлением легкой нагрузки является направление вращения в направлении противовеса в случае весового соотношения, в котором вес противовеса > веса кабины лифта, и направлением легкой нагрузки является направление вращения по направлении кабины лифта в случае весового соотношения, в котором вес противовеса < кабины лифта. При регулировании нулевой скорости создают крутящий момент нагрузки для удержания неподвижной кабину, не допуская вращения в направлении легкой нагрузки. В таком случае команда крутящего момента, установленная с помощью системы регулирования скорости, имеет полярность, которая соответствует направлению легкой нагрузки. Таким образом, секция управления системы может без труда определить или обнаружить направление легкой нагрузки на основе полярности команды крутящего момента, не применяя датчик, например датчик нагрузки или датчик крутящего момента.
[0021] Без необходимости в датчике нагрузки и датчике крутящего момента эта система управления движением кабины лифта является очень полезной в отношении стоимости и требуемого пространства для сенсорного устройства.
[0022] Инвертор выполнен с возможностью обнаруживать направление легкой нагрузки и управлять движением кабины лифта без учета команды направления движения от контроллера. Следовательно, эта система управления может предотвратить движение кабины в направлении тяжелой нагрузки из-за неправильной передачи команды движения вперед (Вверх (вперед)) или команды движения назад (Вниз (назад)) из контроллера и избежать риска увеличения потребляемой мощности и застревания между этажами вследствие движения в направления тяжелой нагрузки.
[0023] Кроме того, система, не требующая ни датчика нагрузки, ни датчика крутящего момента, может предотвратить движение кабины в направлении тяжелой нагрузки из-за неправильного измерения датчика и избежать риска увеличения потребляемой мощности и застревания между этажами вследствие движения в направлении тяжелой нагрузки.
[0024] Система в соответствии с настоящим изобретением может обнаружить направление легкой нагрузки без использования внешнего датчика нагрузки или крутящего момента, а значит, устранить необходимость затрат и пространства, необходимых при установке такого датчика.
[0025] Так как направление легкой нагрузки определяют на стороне инвертора, и движением кабины управляют на стороне инвертора без учета команды направления движения от контроллера, система может предотвратить риск увеличения потребляемой мощности и застревания в кабине, остановившейся между этажами, вызванного ошибочной передачей сигнала от контроллера к инвертору и движением в направлении тяжелой нагрузки.
[0026] Кроме того, без необходимости использования внешнего датчика нагрузки или крутящего момента, система может предотвратить риск увеличения потребляемой мощности и застревания в кабине, остановившейся между этажами, что вызвано ошибочным измерением при использовании датчика и движением в направлении тяжелой нагрузки.
Краткое описание чертежей
[0027]
Фиг. 1 представляет схему, показывающую общую конструкцию лифтовой системы в практическом примере в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 2(a) представляет схему, показывающую организацию соединений входного источника питания, аварийного источника питания и инвертора в практическом примере в соответствии с настоящим изобретением. Фиг. 2(b) представляет вид, показывающий формы сигналов на различных участках, показанных на фиг. 2(a).
Фиг. 3 представляет структурную схему, показывающую один пример системы регулирования скорости двигателя в секции управления инвертора в практическом примере в соответствии с настоящим изобретением.
Фиг. 4 представляет временную диаграмму, показывающую операции в процессе обнаружения направления легкой нагрузки для практического примера в соответствии с настоящим изобретением.
Фиг. 5 представляет схему, показывающую общую конструкцию лифта более ранней технологии.
Фиг. 6 представляет схему, показывающую конструкцию тормоза, используемого в лифте.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
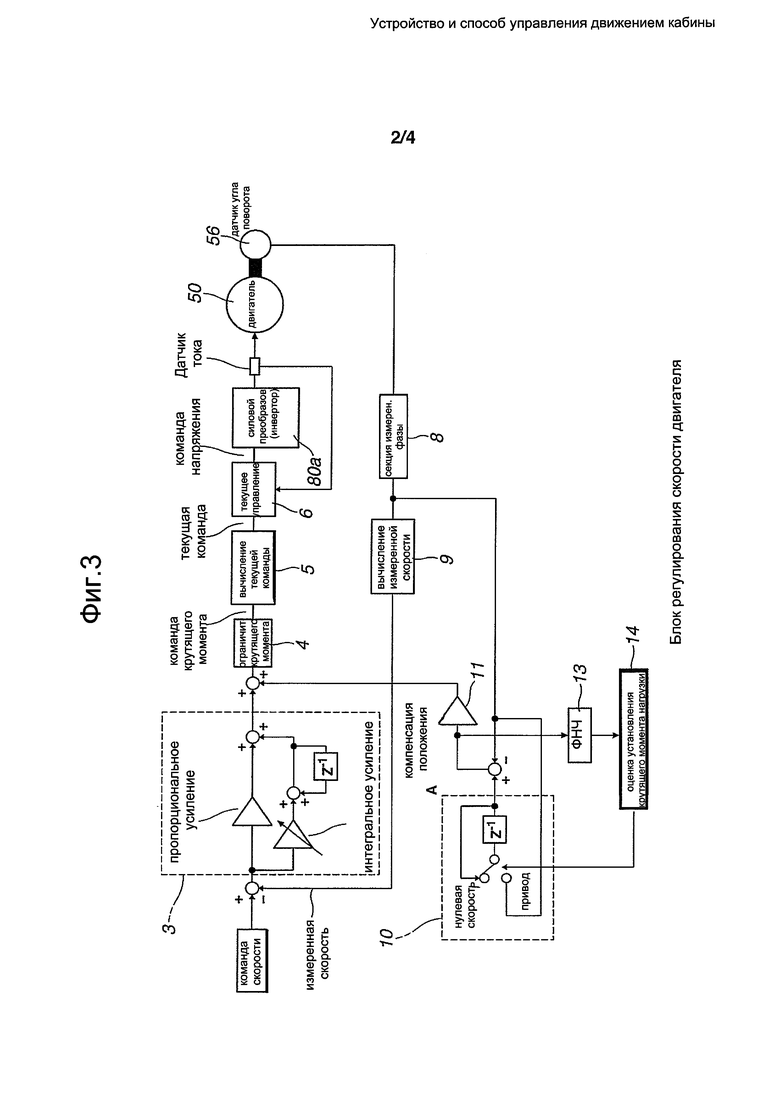
[0028] Ниже приводится объяснение вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. Однако настоящее изобретение не ограничено следующими вариантами осуществления. Фиг. 1 представляет общую конструкцию лифтовой системы в практическом примере в соответствии с вариантом осуществления настоящего изобретения. Фиг. 2 представляет схему, в которой входной источник питания, аварийный источник питания, инвертор и двигатель соединены в практическом примере в соответствии с вариантом осуществления.
[0029] На фиг. 1 двигатель 50, вал 50а вращения, шкив 51, основной канат 52, противовес 53, кабина или клетка 54 лифта и датчик угла поворота 56 оформлены структурно таким же образом, как на фиг. 5. Однако в этом варианте осуществления настоящего изобретения датчик 55 нагрузки на фиг. 5 не предусмотрен.
[0030] Инвертор 80 включает в себя секцию силового преобразования и секцию управления. Например, секция силового преобразования включает в себя схему трехфазного мостового соединения переключающих приборов. Например, секция управления включает в себя нижеупомянутую систему регулирования скорости двигателя (блок регулирования скорости), как показано на фиг. 3, и секцию обнаружения направления легкой нагрузки для обнаружения направления легкой нагрузки двигателя 50 в соответствии с полярностью значения команды крутящего момента системы регулирования скорости.
[0031] Инвертор 80 принимает измеренную результирующую информацию (А, В) скорости вращения и направления вращения от датчика угла поворота 56, преобразует, до заданного напряжения, мощность входного источника 100 питания или аварийного источника 110 питания, показанных на фиг. 2(a), подает напряжение на фазу U, фазу V и фазу W двигателя 50 и тем самым управляет вращением двигателя 50.
[0032] Контроллер 90 выполняет коммуникацию (обмен) сигналами последовательности, относящимися к работе инвертора, с инвертором 80.
[0033] Сигналы последовательности от контроллера 90 к инвертору 80 включают в себя команду переключения ((Normal/UPS) для переключения работы нормального входного источника 100 питания и работы аварийного источника 110 питания, команду привода прямого вращения (Вверх (вперед)) и команду привода обратного вращения (Вниз (назад)), многоскоростную команду для нулевой скорости, высокой скорости, низкой скорости и замедленной скорости, как показано на верхнем уровне фиг. 4, упомянутой ниже.
[0034] Сигналы последовательности от инвертора 80 к контроллеру 90 включают в себя команду открытия тормоза, сигнал, представляющий рабочее состояние, сигнал, представляющий состояние обнаружения направления нагрузки, как показано на нижнем уровне фиг. 4, упомянутой ниже.
[0035] Хотя на фиг. 1 он отсутствует, предлагается тормоз для механической остановки вала 50а вращения между двигателем 50 и шкивом 51 в момент остановки лифта. Например, тормозное устройство, показанное на фиг. 6, используется в качестве тормоза.
[0036] Фиг. 2(a) показывает схему соединений для переключения входа к инвертору 80 между входным источником 100 питания и аварийным источником 110 питания с электромагнитными контакторами МС1 и МС2.
[0037] Фиг. 2(b) показывает сигналы для различных участков фиг. 2(a). Vac1 представляет межфазное напряжение входного источника 100 питания. Vac2 представляет выходное напряжение аварийного источника 110 питания. SW1 представляет сигнал переключателя (SW1), который включается (замыкается) сигналом переключения операции, поданным от контроллера 90 во время выхода из строя входного источника 100 питания. МС1 представляет сигнал электромагнитного контактора (МС1), который включается (замыкается) в нормальном состоянии входного источника 100 питания и выключается (размыкается) в момент отключения электроэнергии. МС2 представляет сигнал электромагнитного контактора (МС2), который выключается (размыкается) в нормальном состоянии входного источника 100 питания и включается (замыкается) в момент отключения электроэнергии. Таким образом, период, в течение которого электромагнитный контактор МС2 включен (замкнут), соответствует периоду работы аварийного источника 110 питания (режим работы ИБП).
[0038] В качестве аварийного источника 110 питания можно использовать однофазный ИБП или аккумулятор или 3-фазный ИБП.
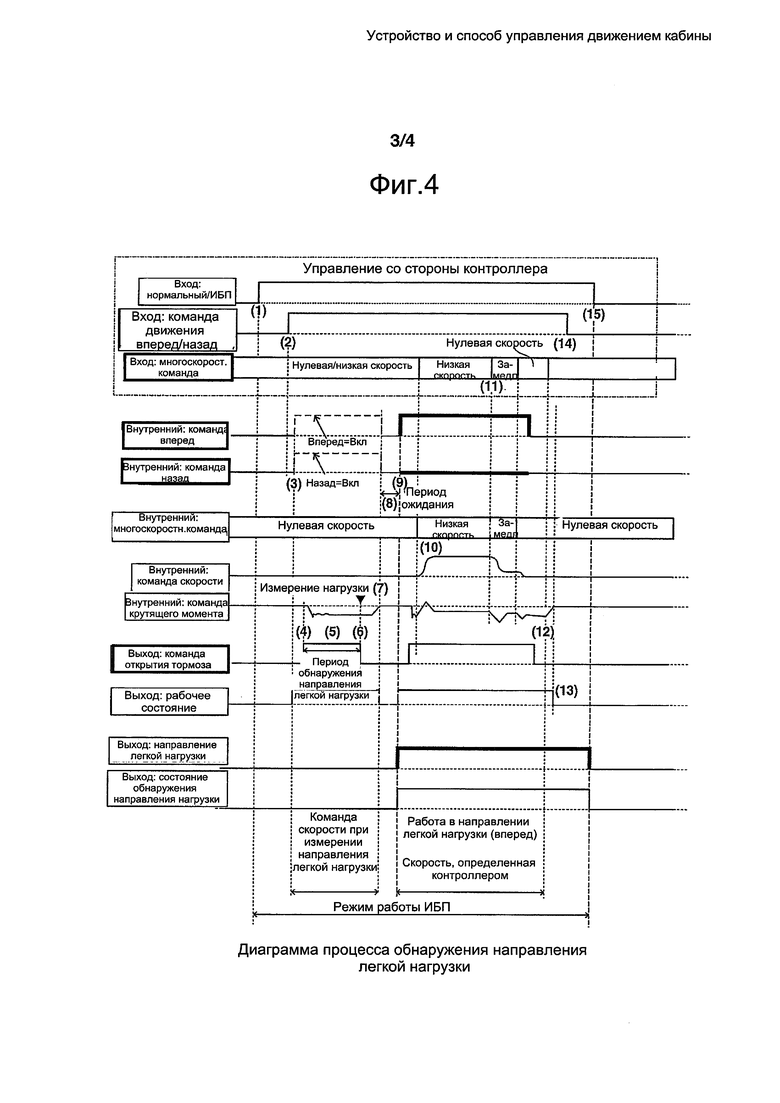
[0039] Система регулирования скорости двигателя (блок регулирования скорости), предусмотренная в секции управления инвертора 80, показана на фиг. 3. Система на фиг. 3 соответствует блоку регулирования скорости, показанному на фиг. 1 Патентного Документа 4.
[0040] На фиг. 3 двигатель 50 (двигатель с постоянными магнитами, РМ двигатель) приводится в движение с переменной скоростью с помощью выходного сигнала (выходного сигнала, имеющего управляемую частоту и управляемое напряжение) силового преобразователя 80а инвертора 80. Для управления выходом силового преобразователя 80а усилитель 3 регулирования скорости выполняет вычисление по пропорционально-интегральному (PI) алгоритму отклонения между командой скорости и сигналом измеренной скорости двигателя, полученным с помощью датчика угла поворота 56, секции 8 измерения фазы и секции 9 измерения скорости. Результат этого измерения ограничен ограничителем 4 крутящего момента. Секция 5 вычисления команды по току преобразует полученную таким образом команду крутящего момента в команду по току, соответствующую команде крутящего момента. Усилитель 6 с токовым управлением выполняет пропорционально-интегральное вычисление отклонения между этой командой по току и сигналом измеренного тока двигателя. Выход силового преобразователя 80а управляется с помощью результата вычисления в усилителе 6 с управлением по току.
[0041] Что касается измерения скорости двигателя, секция 8 измерения фазы считывает угловое положение ротора двигателя как фазу (положение) с импульсного выходного сигнала датчика угла поворота 56, а секция 9 измерения скорости определяет скорость по отклонению времени для этого углового положения.
[0042] Удерживающая схема 10 переключает скорости при регулировании нулевой скорости и нормальном приводе с помощью выключателя удержания и удерживает сигнал измеренного положения ротора двигателя в течение одного периода управления с помощью буфера (Z-1), когда состояние регулирования скорости двигателя находится в области нормальной скорости привода. Когда состояние регулирования скорости двигателя находится в области нулевой скорости, схема 10 продолжает удерживать сигнал положения точно до тех пор, пока не достигнута область нулевой скорости.
[0043] Усилитель 11 компенсации положения создает сигнал крутящего момента для компенсации положения путем усиления отклонения между сигналом измеренного положения ротора двигателя и сигналом удержания схемы 10 удержания с фиксированным коэффициентом усиления и добавляет этот сигнал крутящего момента для компенсации положения к команде крутящего положения, выводимого из усилителя 3 регулирования скорости. Во время нормальной работы привода выходной крутящий момент управления положением остается неизменным за счет обновления буфера (Z-1) схемы 10 удержания.
[0044] В процессе регулирования нулевой скорости буфер (Z-1) накопления усилителя 3 регулирования скорости сбрасывается, когда крутящий момент для компенсации положения создается усилителем 11 компенсации положения. В момент перехода от режима регулирования нулевой скорости к режиму нормальной работы привода крутящий момент для компенсации положения перед переходом добавляется в буфер накопления для предотвращения резкого изменения крутящего момента во время перехода.
[0045] Фильтр 13 нижних частот принимает в качестве входного сигнала сигнал отклонения положения в точке А, подлежащий подаче в усилитель 11 компенсации положения, и устраняет вибрационный компонент, входящий в состав сигнала отклонения положения, за счет выполнения операции усреднения или выравнивания. Секция 14 оценки установления крутящего момента нагрузки отслеживает, становится ли сигнал отклонения положения, полученный посредством фильтра 13 нижних частот, стабильным или нет. Когда сигнал отклонения положения становится стабильным, секция 14 оценки установления крутящего момента нагрузки оценивает, что крутящий момент компонента нагрузки установлен и изменяется во время работы схемы 10 удержания до нормального режима работы привода.
[0046] С помощью вышеупомянутого управления система может улучшить эффективность регулирования скорости в процессе регулирования нулевой скорости и подавлять колебания положения кабины 54 лифта путем создания требуемого крутящего момента в течение 100 мс, например, после освобождения тормоза, даже когда датчик 55 нагрузки на фиг. 5 не используется.
[0047] Секция обнаружения легкой нагрузки, предложенная в секции управления инвертора 80, в этом практическом примере осуществления выполнена с возможностью вычислять или определять значение команды крутящего момента (выход ограничителя 4 крутящего момента) во время исполнения регулирования нулевой скорости в блоке регулирования скорости на фиг. 3, чтобы проверить полярность вычисленного значения команды крутящего момента и тем самым выявить направление легкой нагрузки двигателя, определяемого с помощью весового баланса противовеса 53 и кабины 54 лифта из направлений вращения, найденных с помощью датчика угла поворота 56, на основе полярности значения команды крутящего момента.
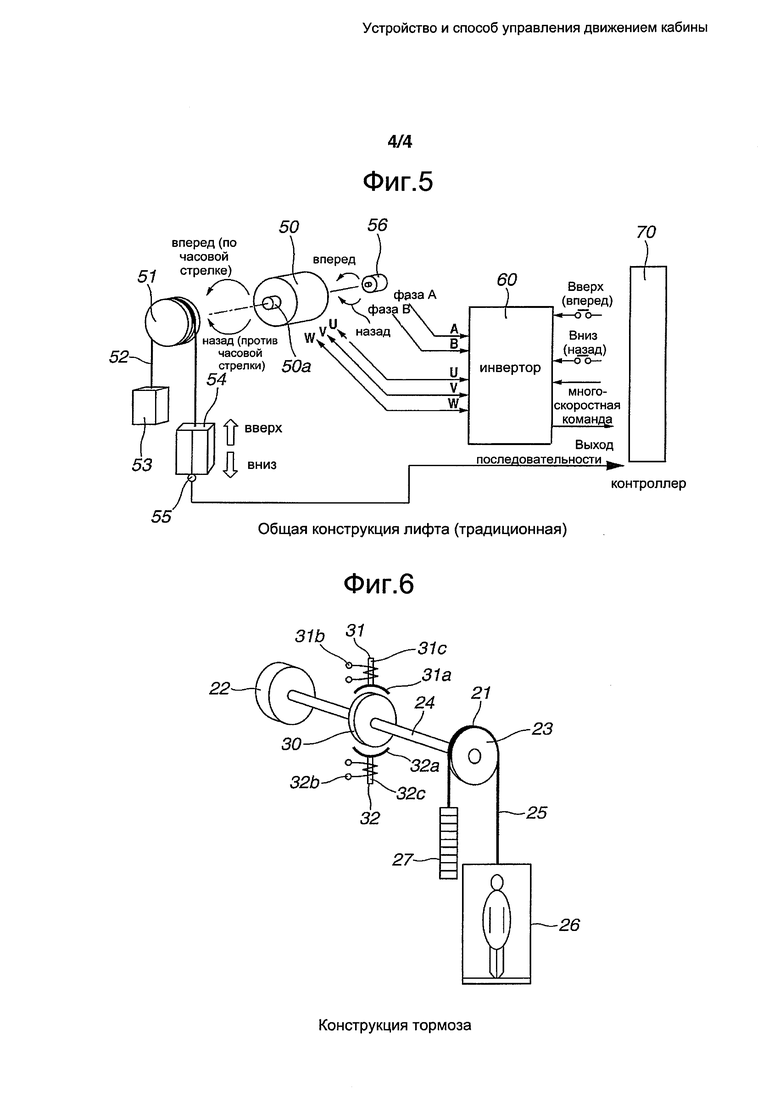
[0048] Фиг. 4 представляет диаграмму, иллюстрирующую поток операций для обнаружения направления легкой нагрузки в этом практическом примере.
[0049] На фиг. 4 наименование сигнала «входной сигнал последовательности» означает сигнал или сигналы последовательности, поступающие из контроллера 90 в инвертор 80 на фиг. 1. Наименование сигнала «выходной сигнал последовательности» на фиг. 4 означает сигнал или сигналы последовательности, выходящие из инвертора 80 в контроллер 90, показанные на фиг. 1. Наименование сигнала «внутренний» на фиг. 4 означает внутренний сигнал или внутренние сигналы, используемые внутри инвертора 80. Команда вращения вперед, команда вращения назад, многоскоростная команда, команда скорости и команда крутящего момента входят в состав внутренних сигналов.
[0050] <Отметка времени (1)>
Происходит отключение питания во входном источнике 100 питания на фиг. 2. Входная последовательность «нормальный/ИБП» включается и запускается режим работы ИБП. Таким образом, МС1 на фиг. 2 размыкается, МС2 замыкается и, следовательно, запускается подача питания от ИБП (аварийный источник 110 питания) на инвертор 80 (с помощью контроллера 90 управление переключением на аварийный источник питания). Кроме того, контроллер 90 устанавливает команду скорости для двигателя 50 на ноль, так что команда скорости = 0. Соответственно, внутренний сигнал «многоскоростная команда» устанавливается на «нулевой скорости».
[0051] <Отметка времени (2)>
Либо команда вращения вперед, либо команда вращения назад включается от контроллера 90.
[0052]<Отметка времени (3)>
В ответ на команду на отметке времени (2) команда внутренней операции (внутренняя команда вращения вперед или внутренняя команда вращения назад) внутри инвертора 80 включается, и операция стартует с командой скорости = 0. Регулирование скорости двигателя осуществляется с помощью блока управления на фиг. 3. Выход последовательности для рабочего состояния включается.
[0053] <Отметка времени (4)>
Тормоз открывается при включении выходной последовательности команды открытия тормоза на фиг. 4. В частности, инвертор 80 выдает сигнал на открытие тормоза контроллеру 90, и контроллер 90 выполняет управление с целью открытия тормоза.
[0054] <Период (5)>
В течение заданного периода времени команда скорости устанавливается равной 0 и тормоз удерживается открытым путем установки выходной последовательности для команды открытия тормоза на фиг. 4. Значение команды крутящего момента, вычисляемого блоком управления на фиг 3 в течение периода (5), записывается в непоказанной памяти в секции управления.
[0055] Ниже приводится объяснение касательно полярности команды крутящего момента со ссылкой на фиг. 1.
[0056] Когда вес кабины 54 больше, чем вес противовеса 53, кабина 54 движется в направлении вниз (вращение в обратном направлении, против часовой стрелки, как показано на чертеже), если действует только ее собственный вес. В этой ситуации двигатель 50 управляется командой скорости, установленной равной 0. Следовательно, полярность команды крутящего момента имеет направление вращения вперед (по часовой стрелке) двигателя 50. Следовательно, скорость двигателя удерживается равной нулю, и кабина 54 удерживается в неподвижном состоянии.
[0057] Когда вес кабины 54 меньше, чем вес противовеса 53, кабина 54 движется в направлении вверх (вращение в прямом направлении (по часовой стрелке), как показано на чертеже), если действует только ее собственный вес. В этой ситуации двигатель 50 управляется командой скорости, установленной равной 0. Следовательно, полярность команды крутящего момента имеет направление вращения назад (против часовой стрелки) двигателя 50.
[0058] <Отметка времени (6)>
По истечении заданного периода времени (Период (5)) выходная последовательность для команды открытия тормоза отключается, и тормоз закрывается. В частности, инвертор 80 посылает сигнал для закрытия тормоза контроллеру 90, и контроллер 90 выполняет операцию управления для закрытия тормоза.
[0059] <Отметка времени (7)>
Направление легкой нагрузки определяют из полярности значения команды крутящего момента, записанной в период (5). Работа инвертора 80 временно останавливается, так как тормоз закрывается на отметке времени (6). Более того, выход последовательности для рабочего состояния выключается в этот момент времени.
[0060] <Период (8)>
После отметки времени (7) предусматривается время ожидания для удержания закрытого состояния тормоза в течение заданного интервала времени. Таким образом, выполняется операция ожидания.
[0061] <Отметка времени (9)>
По истечении времени ожидания (период (8)) направление вращения двигателя 50 определяют из направления легкой нагрузки, измеренного на отметке времени (7), и включается одна из внутренней команды прямого вращения и внутренней команды обратного вращения на фиг. 4.
[0062] Внутренняя команда прямого вращения выбирается, когда направлением легкой нагрузки является направление в сторону противовеса 53 (полярность значения команды крутящего момента, зарегистрированного в период (5), имеет направление обратного вращения двигателя), как в случае фиг. 1. Внутренняя команда обратного вращения выбирается, когда направлением легкой нагрузки является направление в сторону кабины 54 (полярность значения команды крутящего момента, зарегистрированного в период (5), имеет направление прямого вращения двигателя 50).
[0063] Фиг. 4 представляет пример, в котором направлением легкой нагрузки является направление в сторону противовеса 53 и внутренняя команда прямого вращения включена. Эта внутренняя команда прямого вращения может отличаться от входной последовательности для команды прямого привода (или команды обратного привода), который включается на отметке времени (2).
[0064] Кроме того, выходная последовательность для рабочего состояния, показанная на фиг. 4, снова включается в этот момент времени. Кроме того, сигналы (выходная последовательность для состояния обнаружения направления легкой нагрузки и выход последовательности для направления легкой нагрузки) выводятся для информирования контроллера 90 о завершении обнаружения направления легкой нагрузки и направлении легкой нагрузки.
[0065] <Отметка времени (10)>
Контроллер 90 изменяет входную последовательность многоскоростной команды на низкую скорость. В ответ на это последовательность многоскоростной команды внутри инвертора переходит от нулевой скорости на низкую скорость, и запускается работа инвертора 80. Внутренняя команда скорости изменяется от 0, как показано на фиг. 4. Внутренняя команда скорости определяется путем вычисления из команды низкой скорости внутри инвертора и направления вращения двигателя 70, определенного на отметке времени (9). В примере на фиг. 4 полярность внутренней команды крутящего момента является отрицательной (обратное направление вращения (против часовой стрелки) двигателя 50) и, следовательно, полярность внутренней команды скорости является положительной (прямое направление вращения (по часовой стрелке) двигателя 50).
[0066] Выходной сигнал последовательности для команды открытия тормоза установлен во включенное состояние во время между отметкой времени (9) и отметкой времени (10), и тормозом управляют в открытом состоянии на отметке времени (10).
[0067] <Отметка времени (11)>
Когда кабина 54 приближается к этажу назначения, контроллер 90 изменяет входной сигнал последовательности многоскоростной команды до замедленной скорости и до нулевой скорости. Когда нулевая скорость достигнута, внутренняя команда прямого или обратного вращения выключается (в этом примере внутренняя команда прямого вращения выключается), как показано на фиг. 4, и инвертор 80 прекращает работу. Тормоз закрывается при отключении выходного сигнала последовательности для команды открытия тормоза. В это время кабина 54 обнаруживается остановленной на целевом этаже.
[0068] <Отметка времени (12)>
После прекращения работы инвертора 80 тормоз находится в закрытом состоянии.
[0069] <Отметка времени (13)>
В ответ на прекращение работы инвертора 80 выход последовательности для рабочего состояния выключается, как показано на фиг. 4.
[0070] <Отметка времени (14)>
Команда привода (вход последовательности (команда привода вперед/назад на фиг. 4) от контроллера 90 выключается.
[0071] <Отметка времени (15)>
Источник питания для инвертора 80 переключается от ИБП (аварийный источник питания 110) на входной источник питания 100 при выключении входного сигнала последовательности для "нормальный/ИБП" (МС1 включен и МС2 выключен). Таким образом, операция при отключении питания (режим работы ИБП) завершена.
[0072] Интервал отметок времени (3) ~ (7) является рабочим периодом для измерения направления нагрузки при команде скорости на нуле. Интервал времени для отметок времени (4) ~ (6) является периодом для обнаружения направления легкой нагрузки. Интервал отметок времени (9) ~ (12) является периодом привода в направлении легкой нагрузки (в этом пример прямое вращение) посредством многоскоростной команды от контроллера 90.
[0073] С помощью этих операций система может перемещать кабину 54 лифта к этажу в направлении легкой нагрузки во время отключения питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ АВАРИЙНЫМ ТОРМОЖЕНИЕМ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ | 2018 |
|
RU2771711C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЭВАКУАЦИИ ЛИФТА И КОНТРОЛЛЕР | 2018 |
|
RU2765200C1 |
| ИСТОЧНИК ПИТАНИЯ ПРИВОДА ЛИФТА | 2004 |
|
RU2431594C2 |
| ФАЗА ПУСКА СПАСАТЕЛЬНОГО РЕЙСА ПОДЪЕМНИКА ПРИ ОГРАНИЧЕННОМ ЭЛЕКТРОПИТАНИИ, ПРОИЗВОДИМАЯ ПОД ДЕЙСТВИЕМ СИЛЫ ТЯЖЕСТИ | 2009 |
|
RU2535117C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИФТА В АВАРИЙНОМ РЕЖИМЕ | 2008 |
|
RU2484003C2 |
| Способ управления лифтового электропривода | 2020 |
|
RU2789908C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В АВТОМОБИЛЕ, ПРЕДНАЗНАЧЕННОЕ ДЛЯ УПРАВЛЕНИЯ ЗАЩИТНЫМИ МЕРАМИ ПРОТИВ ОТКАЗА ИСТОЧНИКА ЭЛЕКТРОПИТАНИЯ | 2011 |
|
RU2529424C2 |
| СПАСАТЕЛЬНАЯ ЛИФТОВАЯ СИСТЕМА | 2009 |
|
RU2500604C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИФТОВ | 2011 |
|
RU2584037C2 |
| Лифт | 2018 |
|
RU2760796C2 |

При выходе из строя основного источника питания переключают вход инвертора (80) на аварийный источник питания. Определяют направление легкой нагрузки с помощью весового баланса между кабиной (54) и противовесом (53). Устанавливают сигнал последовательности для многоскоростной команды инвертору (80). Вычисляют значение команды скорости для направления легкой нагрузки. Управляют системой регулирования скорости. Предложены также способ управления движением кабины лифта и устройства управления движением кабины лифта. Достигается перемещение кабины лифта в направлении легкой нагрузки, во время отключения питания, уменьшение потребления мощности ИБП. 4 н.п. ф-лы, 6 ил.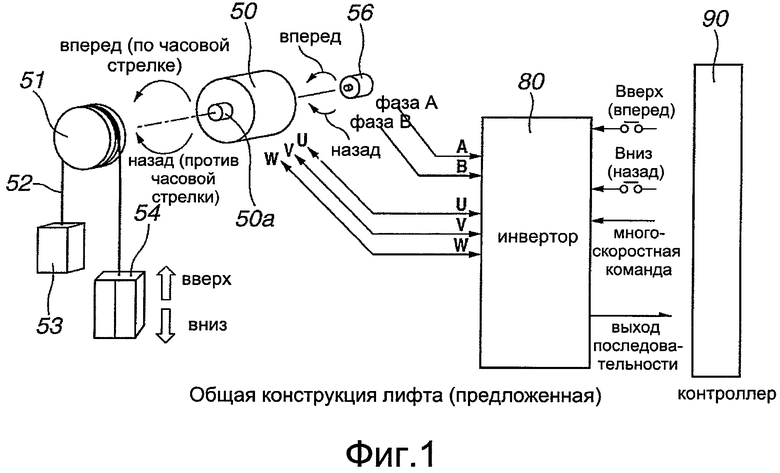
1. Устройство управления движением кабины лифта, содержащее: приводной двигатель лифта; шкив, неподвижно установленный на валу вращения приводного двигателя; основной канат, намотанный на шкив и выполненный с возможностью удерживать противовес на первом конце основного каната и кабину лифта на втором конце основного каната; тормоз для остановки вращения вала вращения двигателя; датчик угла поворота для измерения скорости вращения и направления вращения двигателя;
инвертор, который содержит секцию управления, включающую систему регулирования скорости, выполненную с возможностью определять команду крутящего момента из результата вычисления усилителя для регулирования скорости, выполняющего пропорционально-интегральное вычисление по отклонению между командой скорости и измеренной скоростью, и выполненную с возможностью управлять двигателем так, чтобы изменять скорость, включая область нулевой скорости, и который предназначен для преобразования мощности от одного из входного источника питания и аварийного источника питания и для подачи питания на двигатель; и
контроллер для выполнения коммуникации сигналами последовательности, относящимися к работе инвертора, с инвертором,
при этом упомянутый контроллер предусматривает функцию выполнения операции управления для переключения входа инвертора на аварийный источник питания во время выхода из строя входного источника питания, функцию управления состоянием открытия/закрытия тормоза и функцию передачи сигнала последовательности многоскоростной команды инвертору;
упомянутая секция управления инвертора предусматривает
функцию регулирования нулевой скорости для выполнения регулирования нулевой скорости системы регулирования скорости при открытом состоянии тормоза во время выхода из строя входного источника питания, секцию обнаружения направления легкой нагрузки для вычисления значения команды крутящего момента системы регулирования скорости во время осуществления регулирования нулевой скорости и для обнаружения направления легкой нагрузки двигателя, определяемого по весовому балансу между кабиной лифта и противовесом из направлений вращения двигателя, измеренных датчиком угла поворота, в соответствии с полярностью вычисленного значения команды крутящего момента, и
функцию вычисления значения команды скорости в соответствии с направлением вращения двигателя для направления легкой нагрузки и сигналом последовательности многоскоростной команды от контроллера, и управления системой регулирования скорости с помощью вычисленного значения команды скорости в качестве команды скорости для системы регулирования скорости в открытом состоянии тормоза после того, как направление легкой нагрузки обнаруживают с помощью секции обнаружения легкой нагрузки.
2. Способ управления движением кабины лифта в устройстве, содержащем: приводной двигатель лифта; шкив, неподвижно установленный на валу вращения приводного двигателя; основной канат, намотанный вокруг шкива и выполненный с возможностью удерживать противовес на первом конце основного каната и кабину лифта на втором конце основного каната; тормоз для остановки вращения вала вращения двигателя; датчик угла поворота для измерения скорости вращения и направления вращения двигателя;
инвертор, который содержит секцию управления, включающую систему регулирования скорости, выполненную с возможностью определять команду крутящего момента из результата вычисления по отклонению между командой скорости и измеренной скоростью и выполненную с возможностью управлять двигателем так, чтобы изменять скорость, включая область нулевой скорости, и который предназначен для переключения мощности от одного из входного источника питания и аварийного источника питания и для подачи питания на двигатель; и
контроллер для выполнения коммуникации сигналами последовательности, относящихся к работе инвертора, с инвертором; при этом способ управления движением кабины лифта содержит:
шаг выполнения операции управления для переключения входа инвертора на аварийный источник питания во время выхода из строя входного источника питания с помощью контроллера;
шаг передачи сигнала последовательности многоскоростной команды инвертору с помощью контроллера;
шаг управления тормозом для его приведения в открытое состояние с помощью контроллера;
шаг выполнения регулирования нулевой скорости системы регулирования скорости при нулевой скорости в открытом состоянии тормоза во время выхода из строя входного источника питания с помощью секции управления инвертора;
шаг обнаружения направления легкой нагрузки путем вычисления значения команды крутящего момента системы регулирования скорости во время выполнения регулирования нулевой скорости и обнаружения направления легкой нагрузки двигателя, определяемой с помощью весового баланса между кабиной лифта и противовеса, из направлений вращения двигателя, измеренных датчиком угла поворота, в соответствии с полярностью вычисленного значения команды крутящего момента, с помощью секции обнаружения направления легкой нагрузки секции управления инвертора,
шаг установки сигнала последовательности для многоскоростной команды, подлежащего передаче инвертору, на скорость, отличную от нулевой скорости, во время обнаружения направления легкой нагрузки двигателя посредством шага обнаружения направления легкой нагрузки, с помощью контроллера,
шаг вычисления значения команды скорости в соответствии с направлением вращения двигателя для направления легкой нагрузки и сигналом последовательности многоскоростной команды от контроллера в открытом состоянии тормоза после того, как обнаруживают направление легкой нагрузки с помощью шага обнаружения легкой нагрузки, и управления системой регулирования скорости путем использования вычисленного значения команды скорости в качестве команды скорости для системы регулирования скорости, с помощью секции управления инвертора.
3. Устройство управления движением кабины лифта, содержащее:
кабину лифта;
приводной двигатель лифта для подъема и спуска кабины лифта;
шкив, неподвижно установленный на валу вращения приводного двигателя;
противовес, соединенный с кабиной лифта основным канатом, направляемым шкивом, чтобы уравновешивать кабину лифта;
тормоз для остановки вращения вала вращения приводного двигателя;
секцию измерения скорости для измерения скорости вращения и направления вращения приводного двигателя;
силовой преобразователь, формирующий инвертор для приведения в движение приводного двигателя лифта мощностью, подаваемой от входного источника питания в нормальном режиме работы и от аварийного источника питания в аварийном режиме работы во время выхода из строя входного источника питания;
секцию регулирования скорости для вычисления команды крутящего момента для уменьшения отклонения между командой скорости и измеренной скоростью, установленной с помощью секции измерения скорости, и для управления приводным двигателем путем управления силовым преобразователем в соответствии с командой крутящего момента, и
упомянутая секция регулирования скорости выполнена с возможностью
выполнять управление двигателем с нулевой скоростью путем установки команды скорости на минимальное значение, представляющее нулевую скорость, и отпуска тормоза в случае аварийного режима работы,
определять значение команды крутящего момента в ходе регулирования нулевой скорости,
определять направление легкой нагрузки приводного двигателя в соответствии с полярностью значения команды крутящего момента, определенной в ходе регулирования нулевой скорости, и
управлять силовым преобразователем для приведения в движение приводного двигателя в направлении легкой нагрузки и тем самым перемещать кабину лифта к соседнему этажу в аварийном режиме работы.
4. Способ управления движением кабины лифта для управления движением кабины лифта, уравновешенной противовесом и приводимой в движение вверх и вниз с помощью приводного двигателя лифта посредством инвертора с питанием от нормального источника питания в нормальном режиме работы и от аварийного источника питания во время выхода из строя нормального источника питания, при этом способ управления движением кабины лифта содержит:
первый шаг выполнения управления двигателем с нулевой скоростью при управлении приводным двигателем с помощью команды скорости двигателя, установленной на минимальное значение, представляющее нулевую скорость, при этом тормоз отпускают, чтобы разрешить движение кабины лифта, когда подача питания на приводной двигатель переключается от нормального источника питания на аварийный источник питания во время выхода из строя нормального источника питания;
второй шаг определения значения команды крутящего момента, которая должна быть введена в силовой преобразователь инвертора и которую определяют из отклонения измеренной скорости двигателя от команды скорости двигателя, представляющей желаемую скорость двигателя, чтобы уменьшить отклонение, в ходе управления двигателем с нулевой скоростью;
третий шаг определения направления легкой нагрузки приводного двигателя лифта в соответствии с полярностью значения команды крутящего момента, определенного во время регулирования нулевой скорости; и
четвертый шаг приведения в движение приводного двигателя в направлении легкой нагрузки, чтобы переместить кабину лифта к соседнему этажу в направлении легкого движения во время выхода из строя нормального источника питания.
| JP S60131085 A, 12.07.1985 | |||
| JP 5266799 B2, 21.08.2013 | |||
| JP S56117974 A, 16.09.1981 | |||
| ЛИФТОВАЯ УСТАНОВКА И СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОТЕНЦИАЛЬНО КОРРЕКТИРУЮЩЕЙ ОПЕРАЦИИ В ОТНОШЕНИИ НЕЕ | 2005 |
|
RU2368563C2 |

