Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству для захвата изображения и способу управления им.
Предшествующий уровень техники
[0002] Устройства для захвата изображения, такие как цифровые камеры и цифровые видеокамеры, обеспечиваются вместе с множеством операционных устройств (кнопок, переключателей и подобных им). Однако, поскольку такие устройства для захвата изображения стали более компактными, установочное пространство для размещения этих операционных устройств стало недостаточным. Является возможным делать операционные устройства более компактными с целью соответствия размерам установочного пространства, но существует ограничение того, насколько могут быть уплотнены операционные устройства.
[0003] В соответствии с этим, выложенная заявка на патент Японии № 2000-125184 предлагает устройство для захвата изображения, которое принимает команды ввода без использования операционных устройств, посредством использования датчика встряхивания, обеспечиваемого для обнаружения встряхивания камеры.
[0004] Технология, описанная в выложенной заявке на патент Японии № 2000-125184, предоставляет возможность ввода команд, используя операционные устройства, а также посредством встряхивания устройства для захвата изображения. И, ввод от операционных устройств принимается даже в период, во время которого обнаруживается встряхивание.
[0005] Вследствие этого, существует проблема, что, когда пользователь осуществляет встряхивание устройства для захвата изображения с целью ввода желаемой команды и случайно задействует операционное устройство, такое как кнопка меню или подобная ей, устройством для захвата изображения может обнаруживаться непреднамеренная команда.
Сущность изобретения
Техническая проблема
[0006] Однако, технология, описанная в выложенной заявке на патент Японии № 2000-125184, предоставляет возможность ввода команд, используя операционные устройства, а также посредством встряхивания устройства для захвата изображения. И, ввод от операционных устройств принимается даже в период, во время которого обнаруживается встряхивание.
[0007] Вследствие этого, существует проблема, что, когда пользователь осуществляет встряхивание устройства для захвата изображения с целью ввода желаемой команды и случайно задействует операционное устройство, такое как кнопка меню или подобная ей, устройством для захвата изображения может обнаруживаться непреднамеренная команда.
[0008] Настоящее изобретение было разработано в свете проблемы в предшествующем уровне техники, как описано выше, и обеспечивает устройство для захвата изображения или способ, который не допускает ввод непреднамеренных команд в устройство для захвата изображения даже в ситуации, когда пользователь осуществляет встряхивание устройства для захвата изображения с целью ввода желаемой команды и случайно задействует операционное устройство, такое как кнопка или подобная ей.
Решение проблемы
[0009] С целью решения вышеупомянутой проблемы, в соответствии с настоящим изобретением, обеспечивается устройство для захвата изображения, имеющее операционное средство для обеспечения пользователю возможности ввода команды в данное устройство для захвата изображения, причем устройство для захвата изображения содержит: средство обнаружения встряхивания для обнаружения и вывода компонента ускорения встряхивания, примененного к устройству для захвата изображения; средство обнаружения операции для обнаружения встряхивания, примененного пользователем с целью выполнения предварительно определенного процесса от выхода средства обнаружения встряхивания; и средство управления для подтверждения недействительности операций по меньшей мере части операционного средства, когда посредством средства обнаружения операции является обнаруженным встряхивание, примененное пользователем.
[0010] Дополнительные признаки настоящего изобретения станут очевидны из нижеследующего описания примерных (иллюстративных) вариантов осуществления со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
[0011] Сопроводительные чертежи, включенные в и составляющие часть спецификации, иллюстрируют варианты осуществления данного изобретения и, вместе с описанием, поясняют принципы изобретения.
Фиг.1 представляет собой структурную диаграмму, иллюстрирующую функциональный пример конфигурации цифровой фотокамеры в качестве одного примера устройства для захвата изображения в соответствии с вариантами осуществления настоящего изобретения;
фиг.2A представляет собой вид задней поверхности, демонстрирующий пример внешнего вида камеры в соответствии с вариантами осуществления настоящего изобретения;
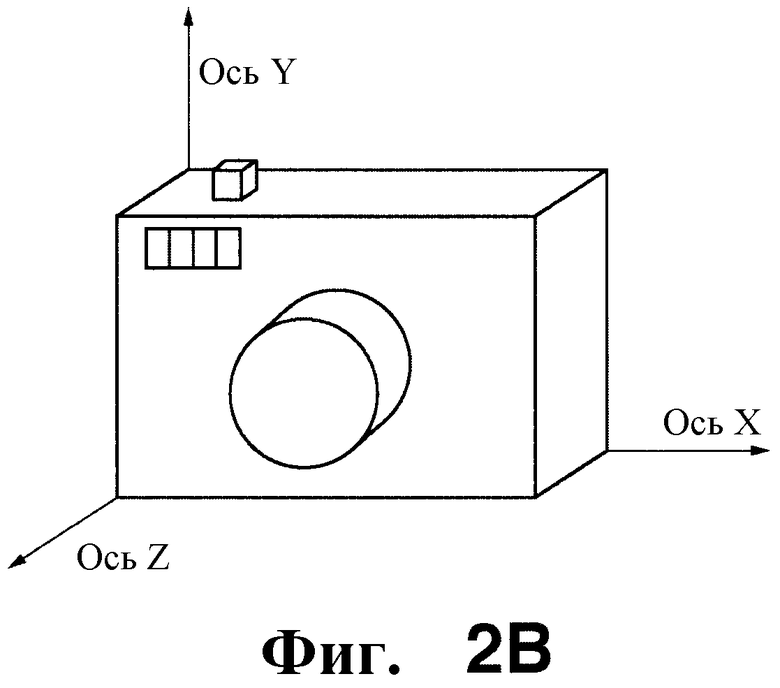
фиг.2B представляет собой вид передней поверхности, демонстрирующий пример внешнего вида камеры в соответствии с вариантами осуществления настоящего изобретения, после установки оси координат для камеры;
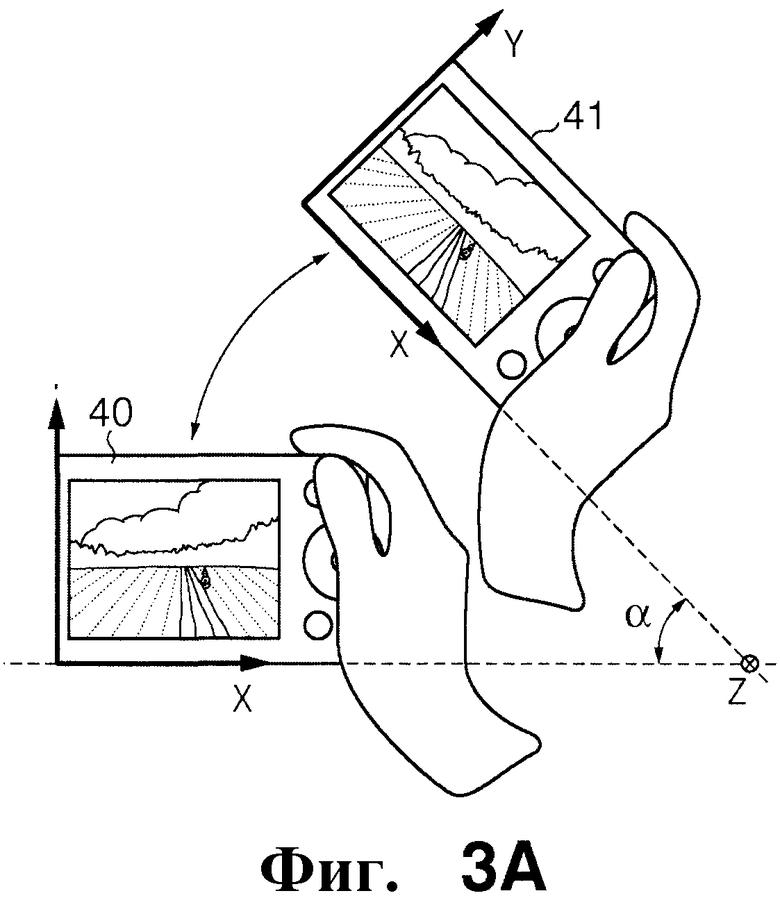
фиг.3A представляет собой диаграмму для пояснения операции отклонения камеры вверх в градусах относительно оси Z от обычного положения;
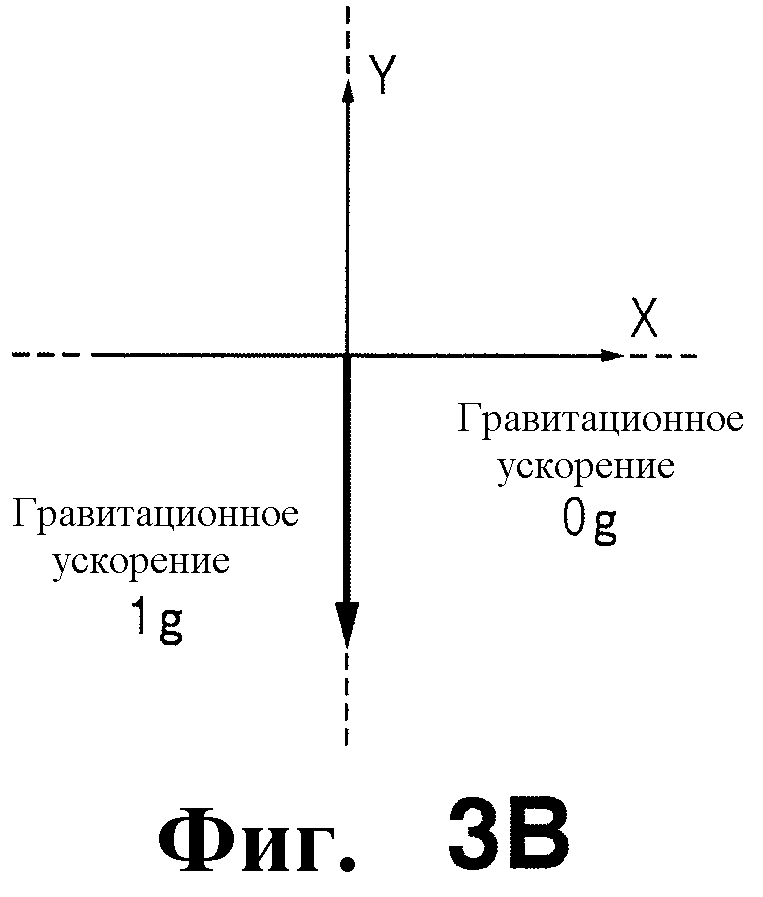
фиг.3B представляет собой диаграмму для пояснения направлений ускорения, обнаруживаемого датчиком ускорения камеры в соответствии с вариантами осуществления настоящего изобретения;
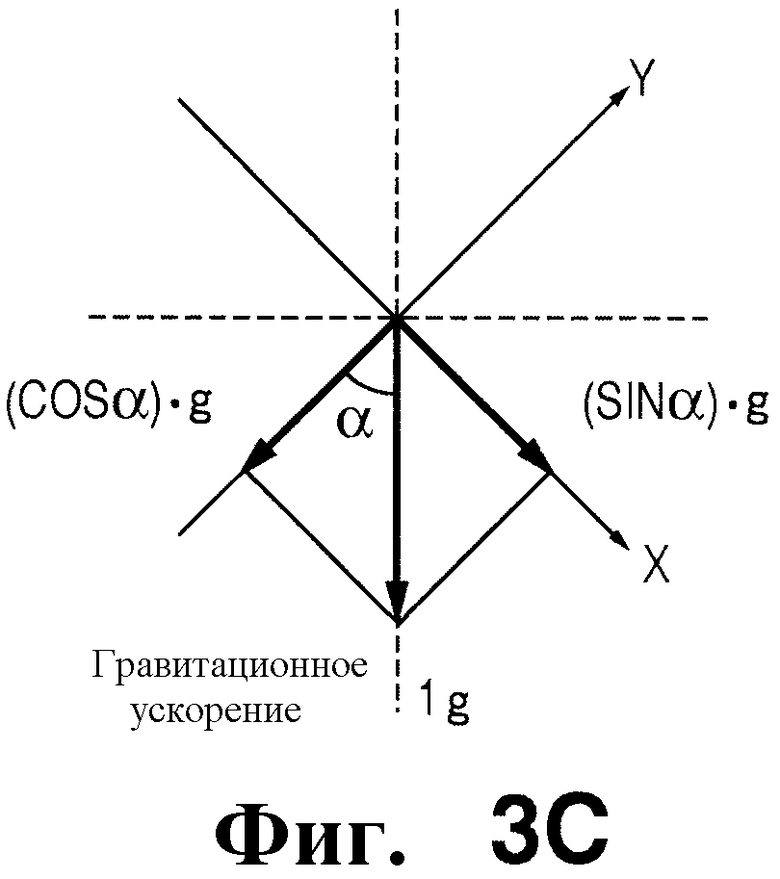
фиг.3C представляет собой диаграмму для пояснения направлений ускорения, обнаруживаемого датчиком ускорения камеры в соответствии с вариантами осуществления настоящего изобретения;
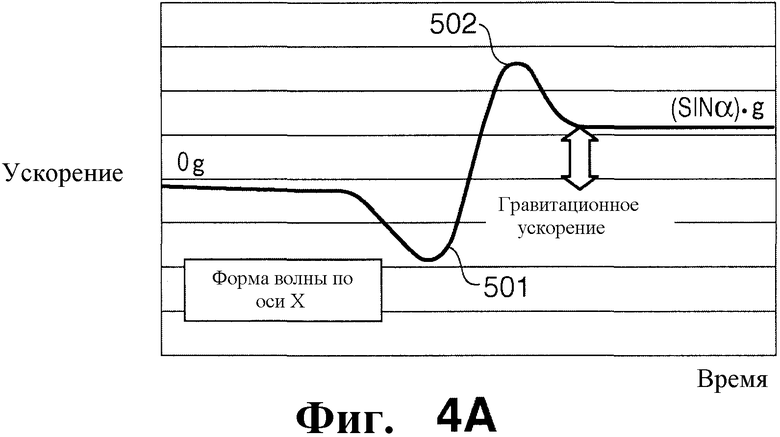
фиг.4A представляет собой диаграмму, демонстрирующую пример выходного сигнала датчика ускорения, когда камера, в соответствии с вариантами осуществления настоящего изобретения, отклоняется вверх на α градусов относительно оси Z из обычного положения;
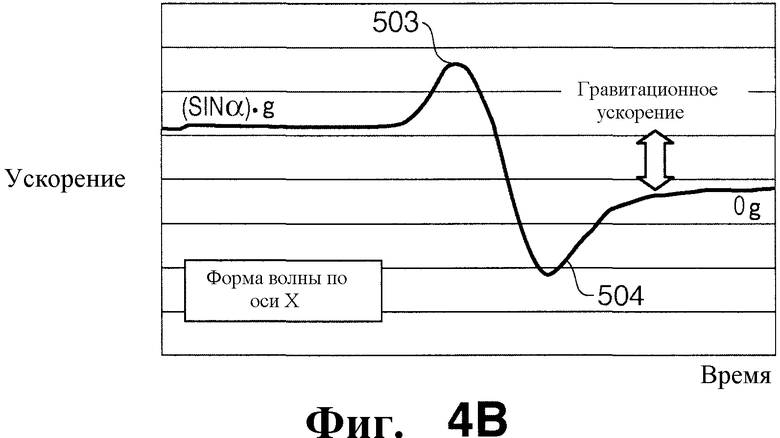
фиг.4B представляет собой диаграмму, демонстрирующую пример выходного сигнала датчика ускорения, когда камера, в соответствии с вариантами осуществления настоящего изобретения, отклоняется вниз к обычному положению из положения отклонения вверх на α градусов относительно оси Z;
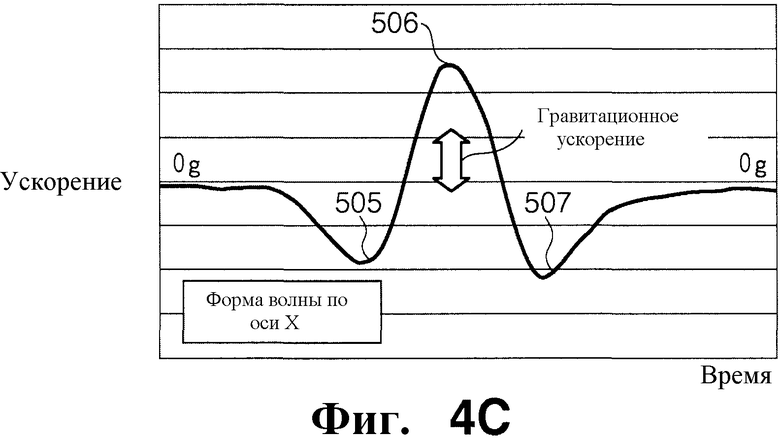
фиг.4C представляет собой диаграмму, демонстрирующую пример выходного сигнала датчика ускорения, когда камера, в соответствии с вариантами осуществления настоящего изобретения, отклоняется вверх на α градусов относительно оси Z из обычного положения и затем дополнительно отклоняется вниз к обычному положению из положения отклонения вверх на α градусов относительно оси Z;
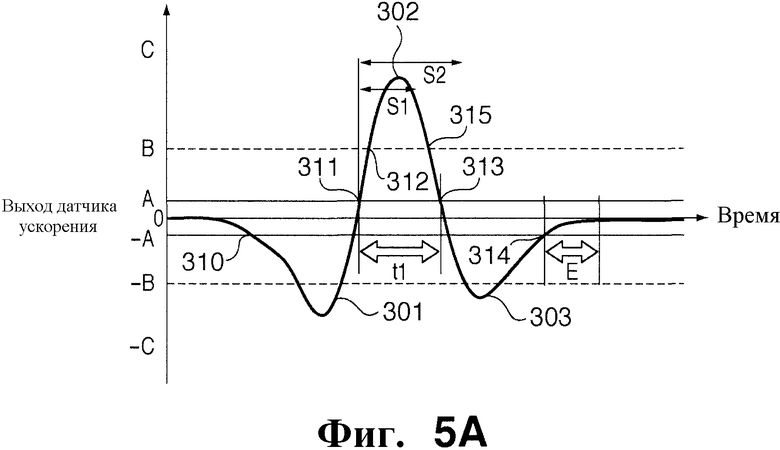
фиг.5A представляет собой диаграмму для пояснения подробного примера формы волны ускорения, полученной посредством операции отклонения по настоящему изобретению в устройстве для захвата изображения в соответствии с настоящим изобретением;
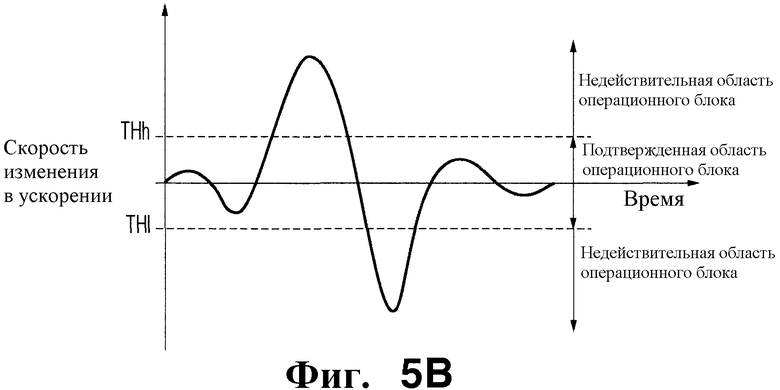
фиг.5B представляет собой диаграмму, демонстрирующую изменение во времени сигнала ускорения, когда из выходного сигнала ускорения удаляется компонент смещения;
фиг.6 представляет собой блок-схему последовательности операций для пояснения основных принципов процесса распознавания операции пользователя в режиме захвата изображения камеры в соответствии с первым вариантом осуществления настоящего изобретения;
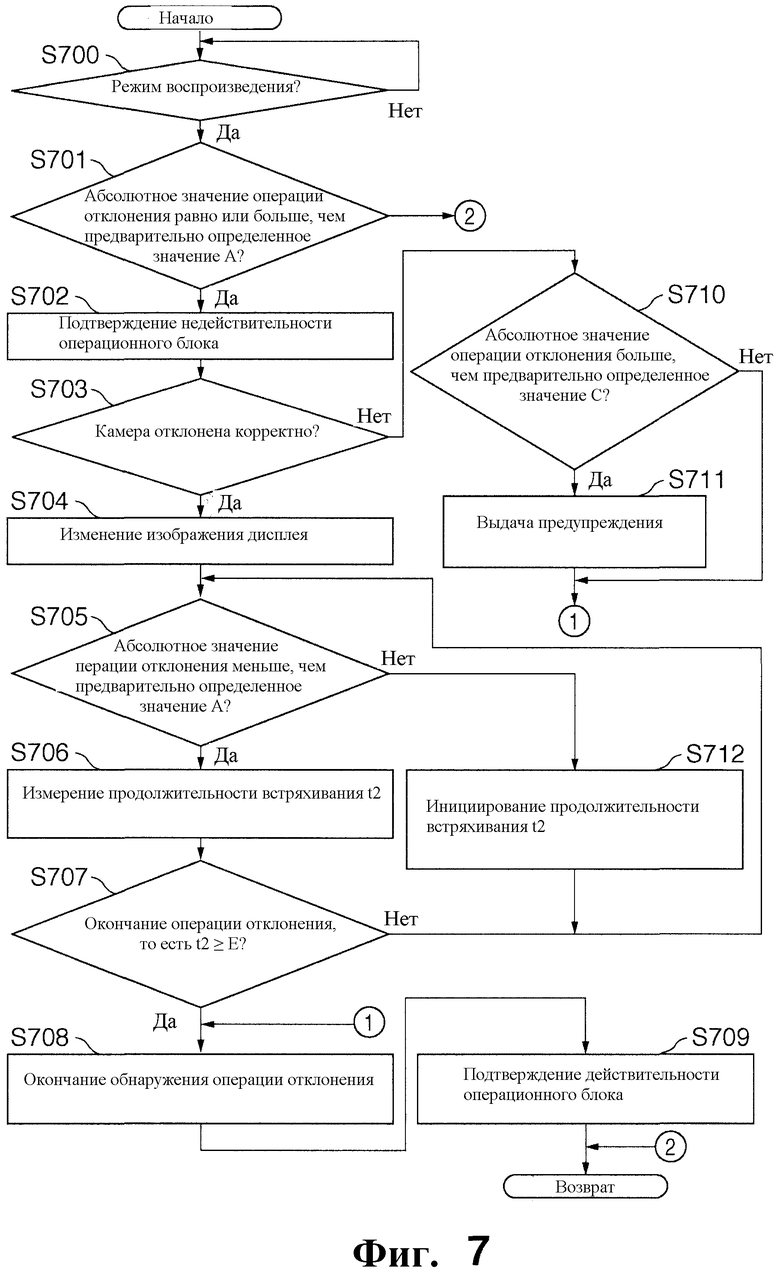
фиг.7 представляет собой блок-схему последовательности операций для пояснения основных принципов подачи изображения и процессов распознавания операции пользователя в режиме воспроизведения камеры в соответствии со вторым вариантом осуществления настоящего изобретения;
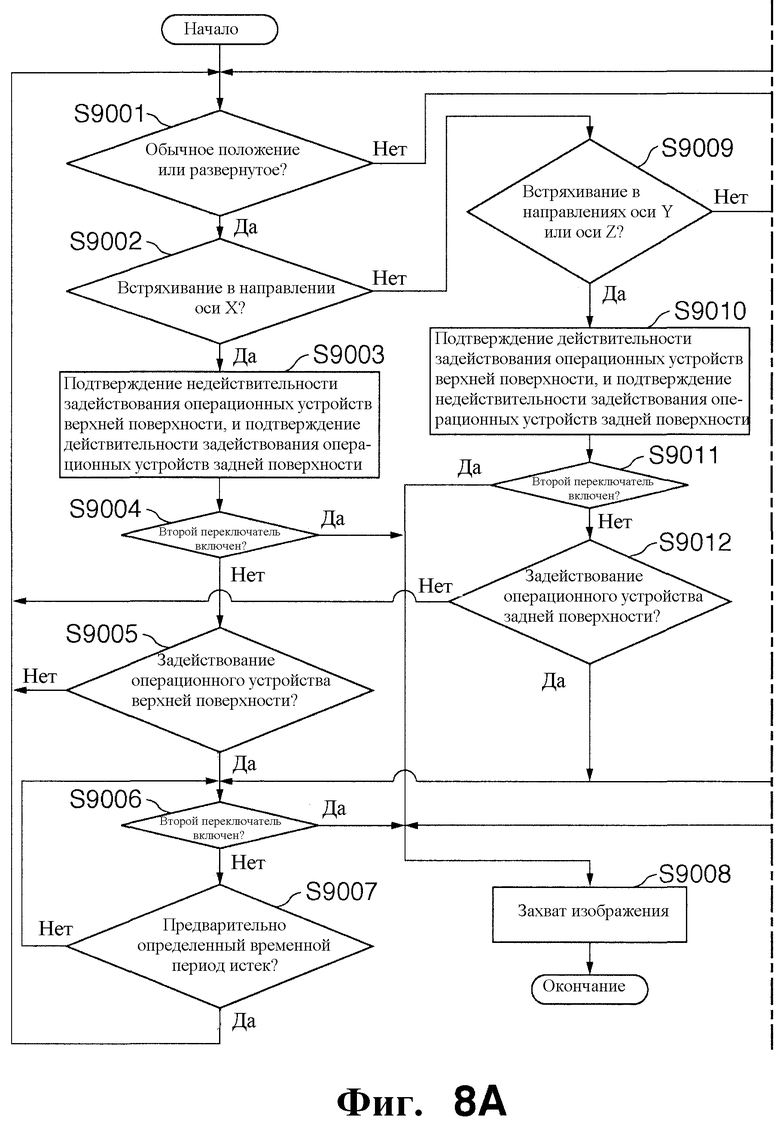
фиг.8A представляет собой блок-схему последовательности операций для пояснения основных принципов процесса распознавания операции пользователя в режиме захвата изображения камеры в соответствии с третьим вариантом осуществления настоящего изобретения; и
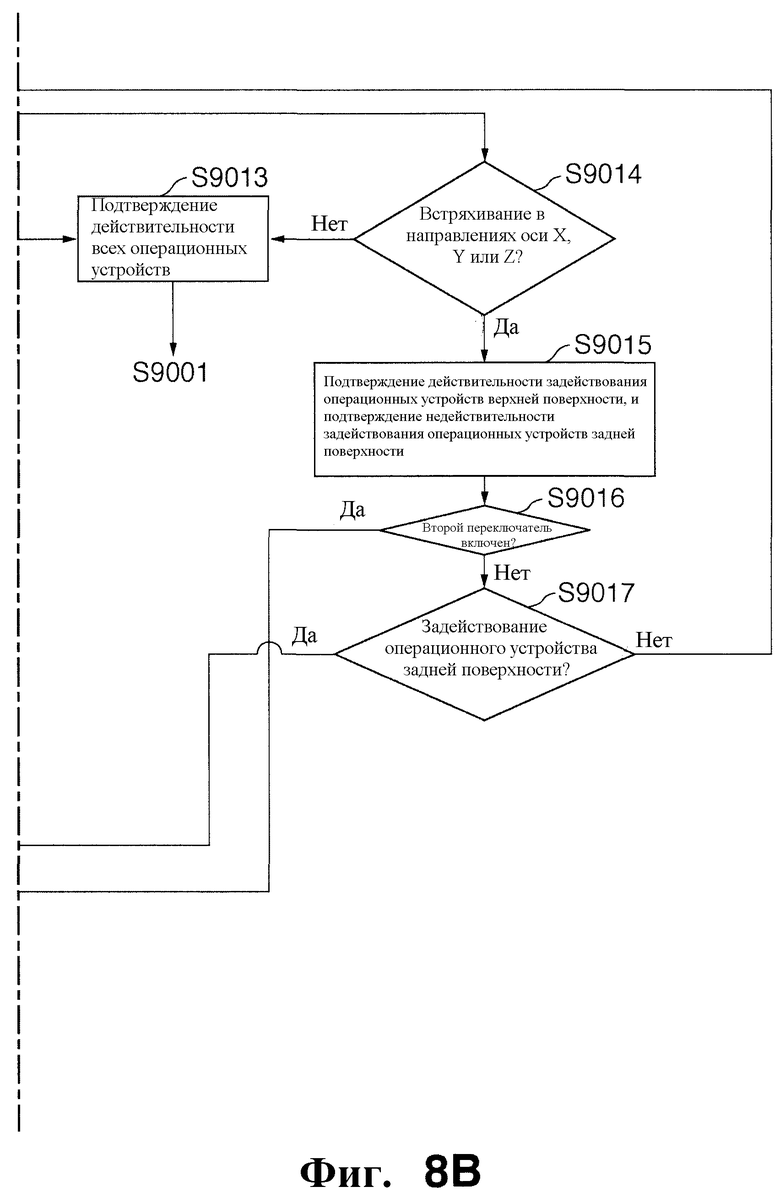
фиг.8B представляет собой блок-схему последовательности операций для пояснения основных принципов процесса распознавания операции пользователя в режиме захвата изображения камеры в соответствии с данным третьим вариантом осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0012] Иллюстративные варианты осуществления настоящего изобретения будут подробно описаны в соответствии с сопроводительными чертежами.
Первый вариант осуществления
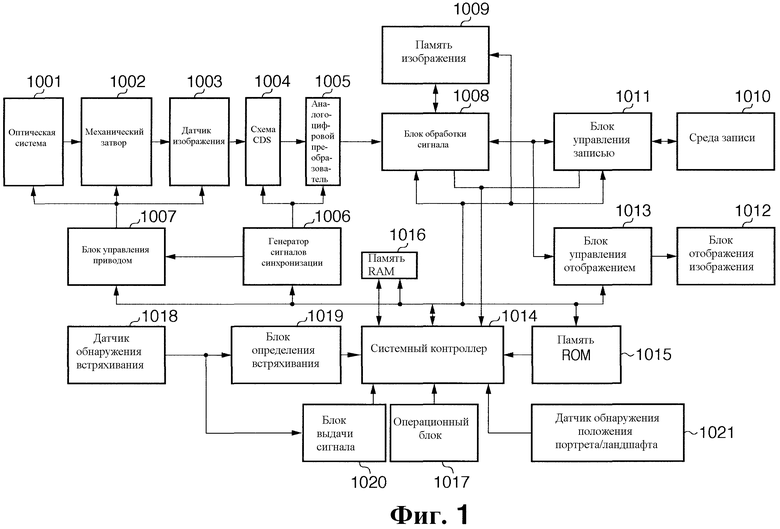
Фиг.1 представляет собой структурную диаграмму, иллюстрирующую функциональный пример конфигурации цифровой фотокамеры (в дальнейшем в настоящем документе именуемой просто как камера) в качестве одного примера устройства для захвата изображения в соответствии с первым вариантом осуществления настоящего изобретения.
В качестве изображения объекта на поверхности захвата изображения датчика 1003 изображения, представляющего собой фотоэлектрический преобразовательный элемент, такой как датчик изображения CCD или CMOS, посредством оптической системы 1001, состоящей из линзы и апертуры (диафрагмы), фокусируется отраженный свет от объекта. Механический затвор 1002, под управлением блока 1007 управления приводом, открывает и закрывает путь светового луча от оптической системы 1001 к датчику 1003 изображения.
[0013] Схема 1004 CDS включает в себя схему двойной коррелированной выборки и выполняет преобразование аналоговых сигналов, такое как двойная коррелированная выборка, на аналоговых сигналах изображения, выдаваемых от датчика 1003 изображения. Аналого-цифровой преобразователь 1005 (A/D) преобразует аналоговые сигналы, выдаваемые схемой 1004 CDS, в цифровые сигналы. Генератор 1006 сигналов синхронизации генерирует сигналы, которые задействуют блок 1007 управления приводом, датчик 1003 изображения, схему 1004 CDS и аналого-цифровой преобразователь 1005.
[0014] В соответствии с сигналами от генератора 1006 сигналов синхронизации, блок 1007 управления приводом управляет механизмами апертуры (диафрагмы) и автоматической фокусировки оптической системы 1001, механическим затвором 1002, и датчиком 1003 изображения.
[0015] Блок 1008 обработки сигнала или схема обработки сигнала выполняет обработку сигнала, такую как цветовая интерполяция и обработка баланса белого, на цифровых данных изображения, выдаваемых посредством аналого-цифрового преобразователя 1005, с целью генерирования данных изображения для отображения на дисплее и записи. Память 1009 изображения сохраняет данные изображения, обработанные посредством блока 1008 обработки сигнала. Блок 1011 управления записью осуществляет запись данных изображения, вводимых посредством блока 1008 обработки сигнала, на съемной среде 1010 записи, такой как карта памяти или подобная ей, которая может сниматься с камеры. Блок 1011 управления записью также осуществляет считывание данных изображения, записанных на среде 1010 записи.
[0016] Блок 1013 управления отображением генерирует сигналы для отображения из данных изображения, выдаваемых посредством блока 1008 обработки сигнала, и отображает их на блоке 1012 отображения изображения. Системный контроллер 1014 управляет всей камерой.
[0017] Энергонезависимая память 1015 (ROM) сохраняет программы, описывающие управление, которое осуществляет системный контроллер 1014, данные управления, такие как параметры, таблицы и подобные им, используемые при выполнении программ, и данные коррекции, такие как адреса дефектных пикселей датчика 1003 изображения. Когда системный контроллер 1014 работает, программы, сохраненные в памяти 1015 ROM, данные управления и данные коррекции пересылаются в память 1016 RAM.
[0018] Операционный блок 1017 включает в себя операционные устройства, такие как кнопки, переключатели, сенсорные панели и подобные им, с целью обеспечения пользователю возможности ввода команд в камеру. Операционный блок 1017 также включает в себя переключатель режимов и может селективно устанавливать индивидуальные режимы функций, такие как режим выключенного питания, режим захвата изображения, режим воспроизведения, а также режим соединения с ПК.
[0019] Датчик 1018 обнаружения встряхивания представляет собой датчик ускорения в настоящем варианте осуществления, и осуществляет обнаружение встряхивания, примененного по отношению к камере. Блок 1019 определения встряхивания определяет действительность команд, вводимых из операционного блока 1017, на основе выхода от датчика 1018 обнаружения встряхивания. Блок 1020 выдачи сигнала осуществляет обнаружение встряхивания камеры на основе выхода от датчика 1018 обнаружения встряхивания, и из обнаруженной таким образом информации встряхивания распознает команду, вводимую, когда пользователь осуществляет встряхивание камеры. Хотя в настоящем варианте осуществления команда распознается в зависимости от направления обнаруженного встряхивания, во внимание может также приниматься другая информация по поводу встряхивания, такая как размер амплитуды встряхивания и количество встряхиваний. Затем, на основе результатов распознавания, блок 1020 выдачи сигнала выдает на системный контроллер 1014 сигнал, представляющий собой некоторую команду, которая может вводиться посредством задействования операционных устройств, включенных в операционный блок 1017.
[0020] Блок 1020 выдачи сигнала имеет, например, таблицу, не показанную, которая коррелирует информацию, относящуюся к встряхиванию, такую как направление встряхивания и количество встряхиваний, с соответствующими командами. Блок 1020 обработки сигнала осуществляет сверку с таблицей и распознает команду в соответствии с информацией, относящейся к встряхиванию, обнаруженному на основе выхода датчика 1018 обнаружения встряхивания. В настоящем варианте осуществления, сигналы, которые блок 1020 выдачи сигнала выдает на системный контроллер 1014, представляют собой такие же сигналы, как и те, которые выдаются на системный контроллер 1014, когда задействуется какое-либо любое из операционных устройств операционного блока 1017. То есть, в камере по настоящему варианту осуществления, по меньшей мере некоторое количество из команд, которые могут вводиться с использованием операционного блока 1017, может также вводиться посредством встряхивания камеры в конкретном направлении.
[0021] Датчик 1021 обнаружения положения портрета/ландшафта, обеспечиваемый по необходимости, осуществляет обнаружение того, находится ли камера в положении портрета или ландшафта, и выдает результаты обнаружения на системный контроллер 1014. Необходимо отметить, что датчик 1021 обнаружения положения портрета/ландшафта может также использоваться с целью обнаружения встряхивания камеры. В этом случае, датчик 1018 обнаружения встряхивания не является необходимым.
[0022] Далее дается описание операции захвата изображения (операции захвата изображения обычного кадра) с использованием механического затвора 1002 в камере, имеющей конфигурацию, схожую с той, которая описана выше.
Перед операцией захвата изображения, когда системный контроллер 1014 начинает операцию (такую, как когда камера включается), системный контроллер 1014 осуществляет передачу необходимых программ, данных управления, а также данных коррекции, от памяти 1015 ROM в память 1016 RAM для хранения. В дополнение к этому, системный контроллер 1014 может осуществлять передачу, по необходимости, дополнительных программ и данных управления от памяти 1015 ROM в память 1016 RAM для использования, считывать данные в памяти 1015 ROM непосредственно для использования, или тому подобное.
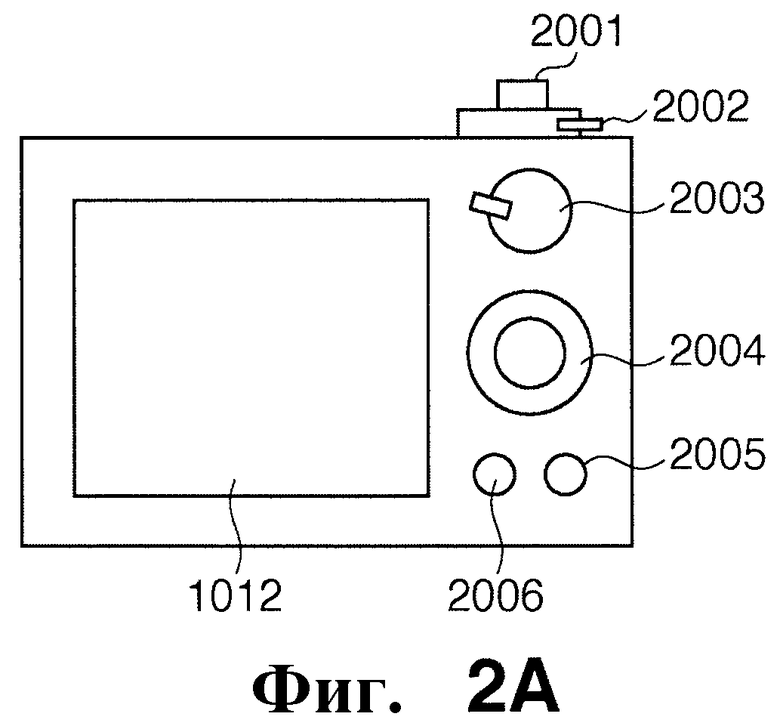
[0023] Фиг.2A представляет собой вид задней поверхности, демонстрирующий пример внешнего вида камеры в соответствии с вариантами осуществления настоящего изобретения.
В примере, продемонстрированном на фиг.2A, пусковая кнопка 2001 и рычаг 2002 изменения фокусного расстояния 2002 для изменения фокусного расстояния увеличительной линзы оптической системы 1001 обеспечиваются на верхней поверхности камеры. В дополнение к этому, переключатель 2003 режимов для изменения режима захвата изображения и функциональная кнопка 2004, включающая направляющий курсор и клавиши установок для осуществления различных установок, обеспечиваются на задней поверхности камеры. Кнопка 2005 меню для отображения различных меню установок на блоке 1012 отображения изображения и кнопка 2006 отображения для переключения отображения на блоке 1012 отображения изображения дополнительно обеспечиваются на задней поверхности. Эти кнопки, переключатели и клавиши все являются включенными в операционный блок 1017.
[0024] Пусковая кнопка 2001 имеет структуру, такую что, при нажатии приблизительно наполовину, включается первый переключатель, а при нажатии полностью, включается второй переключатель. Когда включается первый переключатель, системный контроллер 1014 начинает операции подготовки захвата изображения, включающие в себя процессы AE и AF. Затем, системный контроллер 1014 осуществляет управление апертурой и линзой оптической системы 1001 через блок 1007 управления приводом и формирует изображение объекта соответствующей яркости на датчике 1003 изображения. Затем, когда включается второй переключатель, системный контроллер 1014 начинает операцию захвата изображения (то есть, осуществляет съемку для записи), открывая механический затвор 1002 через блок 1007 управления приводом в течение соответствующего времени экспонирования на основе AE и экспонируя датчик 1003 изображения. Необходимо отметить, что в случае, когда датчик 1003 изображения имеет функцию электронного затвора, она может использоваться вместе с механическим затвором 1002 для надежного обеспечения необходимого времени экспонирования.
[0025] Датчик 1003 изображения управляется посредством управляющих импульсов, сгенерированных из операционных импульсов, генерируемых посредством генератора 1006 сигналов синхронизации, управляемого посредством системного контроллера 1014 и фотоэлектрическим способом преобразующего сфокусированное изображение объекта в электрические сигналы, которые затем выдаются в качестве аналоговых сигналов изображения. Синхронизированный по времени шум удаляется из аналоговых сигналов изображения, выдаваемых от датчика 1003 изображения на схеме 1004 CDS, работающей на операционных импульсах, генерируемых посредством генератора 1006 сигналов синхронизации, и затем аналоговые сигналы изображения преобразуются в цифровые сигналы изображения посредством аналого-цифрового преобразователя 1005.
[0026] Затем, на блоке 1008 обработки сигнала, управляемом посредством системного контроллера 1014, цифровые сигналы изображения, выдаваемые посредством аналого-цифрового преобразователя 1005, подвергаются цветовому преобразованию, балансу белого, гамма коррекции и другой обработке изображения, обработке преобразования разрешения, обработке сжатия изображения и так далее с целью генерирования данных изображения.
[0027] Память 1009 изображения используется для временного хранения цифровых сигналов изображения в течение обработки посредством блока 1008 обработки сигнала, хранения данных изображения, то есть, сигнально обработанных цифровых сигналов изображения, и тому подобного. Данные изображения, сгенерированные посредством блока 1008 обработки сигнала, преобразуются в данные, подходящие для среды 1010 записи (например, в файловые системные данные, имеющие иерархическую структуру), на блоке 1011 управления записью и записываются на среде 1010 записи. В дополнение к этому, на блоке 1013 управления отображением, данные изображения преобразуются в сигналы, подходящие для блока 1012 отображения изображения, после преобразования разрешения посредством блока 1008 обработки сигнала (например, в аналоговые сигналы формата NTSC), и отображаются на блоке 1012 отображения изображения.
[0028] На этом этапе, схема 1008 обработки сигнала может выдавать цифровые сигналы изображения в качестве данных изображения в память 1009 изображения или на блок 1011 управления записью, в зависимости от управляющих сигналов от системного контроллера 1014, без выполнения обработки изображения на цифровых сигналах изображения. В случае, когда существует запрос от системного контроллера 1014, блок 1008 обработки сигнала выдает цифровые сигналы изображения и информацию данных изображения, произведенную в процессе обработки сигнала, или информацию, извлеченную из такой информации, на системный контроллер 1014. Такая информация включает в себя, например, пространственную частоту изображения, среднее значение пикселей в пределах конкретизированной области, объем данных сжатого изображения и тому подобное. Дополнительно, в ответ на запрос от системного контроллера 1014, блок 1011 управления записью выдает на системный контроллер 1014 информацию, такую как тип и неиспользованная емкость среды 1010 записи.
[0029] При воспроизведении данных изображения, записанных на среде 1010 записи, блок 1011 управления записью осуществляет считывание назначенных к воспроизведению данных изображения со среды 1010 записи при наличии управляющего сигнала от системного контроллера 1014. Затем, блок 1008 обработки сигнала декомпрессирует данные изображения, если это сжатое изображение, и сохраняет данные изображения в памяти 1009 изображения в соответствии с управляющим сигналом от системного контроллера 1014. Данные изображения, сохраненные в памяти 1009 изображения, после того, как они преобразуются, посредством блока 1008 обработки сигнала, в разрешение дисплея, подходящее для разрешения блока 1012 отображения изображения, затем преобразуются в сигнал, подходящий для блока 1012 отображения изображения, на блоке 1013 управления отображением и отображаются на блоке 1012 отображения изображения.
[0030] Далее дается описание блока 1019 определения встряхивания.
Датчик 1018 обнаружения встряхивания представляет собой, например, в настоящем варианте осуществления, датчик ускорения и осуществляет обнаружение компонента ускорения встряхивания, примененного по отношению к камере, а также осуществляет обнаружение операции встряхивания камеры. Датчик 1018 обнаружения встряхивания способен независимо обнаруживать ускорение камеры в каждом из трех направлений, в направлении оси X, в направлении оси Y, а также в направлении оси Z в координационной системе, продемонстрированной на фиг.2B (в дальнейшем в настоящем документе именуемой как система координат камеры). Ориентация камеры, продемонстрированная на фиг.2B, называется обычным положением. В этом случае, например, система координат камеры может быть определена как система, в которой ось Y проходит в направлении, противоположном тому, в котором воздействует сила гравитации, ось Z проходит параллельно оптической оси оптической системы 1001, а ось X проходит в направлении, ортогональном оси Y и оси Z (то есть, в горизонтальном направлении).
[0031] Необходимо отметить, что если встряхивание может быть обнаружено в одном или более конкретных направлениях, не существует конкретного ограничения на тип и количество датчиков и их расположение. Например, вместо датчика ускорения также возможно использовать датчик угловой скорости или датчик гравитации. Необходимо отметить, что в случае, когда камера имеет датчик обнаружения встряхивания камеры или датчик 1021 обнаружения положения портрета/ландшафта, они могут быть использованы в качестве датчика обнаружения встряхивания по настоящему варианту осуществления. В дополнение к этому, хотя на фиг.2B точка начала системы координат камеры продемонстрирована как совпадающая с одной вершиной в случае, когда корпус камеры рассматривается как являющийся прямоугольным, не существует конкретных ограничений на положение точки начала.
[0032] <Форма волны обнаружения ускорения при операции отклонения/встряхивания>
Выходные сигналы, обозначающие ускорение в направлении каждой оси, полученные посредством датчика 1018 обнаружения встряхивания, вводятся в блок 1019 определения встряхивания. Фиг.4A по фиг.4C, а также фиг.5A демонстрируют примеры сигналов, вводимых в блок 1019 определения встряхивания от датчика 1018 обнаружения встряхивания.
[0033] Фиг.4A по фиг.4C демонстрируют формы волны сигнала, демонстрируя изменения во времени в компоненте ускорения в направлении оси X, обнаруженном посредством датчика 1018 обнаружения встряхивания, когда камера отклоняется вверх или вниз. Абсцисса обозначает время, а ордината обозначает компонент ускорения, обнаруженный, когда камера отклоняется вверх от горизонтальной ориентации.
[0034] Фиг.4A демонстрирует форму волны сигнала, обозначающую изменение во времени в компоненте ускорения в направлении оси X, когда камера ускоряется во время начала отклонения вверх из горизонтального состояния, замедляется во время окончания отклонения вверх и останавливается. Фиг.4A соответствует переходу из состояния 40 в состояние 41 на фиг.3A, и ускорения обнаруживаются в ускорении (пик 501) в начале отклонения, а также в замедлении (пик 502) в конце отклонения. Система координат камеры смещается от состояния, продемонстрированного на фиг.3B, к состоянию, продемонстрированному на фиг.3C, поэтому компонент гравитационного ускорения в направлении оси X в неподвижном состоянии изменяется с уровня 0 g, как продемонстрировано на фиг.3B, на уровень (sinα)∙g, как продемонстрировано на фиг.3C, до и после отклонения.
[0035] Также, фиг.4B демонстрирует форму волны сигнала, обозначающую изменение во времени в компоненте ускорения в направлении оси X, обнаруженном посредством датчика 1018 обнаружения встряхивания, когда камера ускоряется и отклоняется вниз из состояния, в котором она отклонена вверх, замедляется по мере отклонения вниз к горизонтальному положению и останавливается. То есть, фиг.4B соответствует переходу из состояния 41 в состояние 40 на фиг.3A, и ускорения обнаруживаются в ускорении (пик 503) в начале отклонения, а также в замедлении (пик 504) в конце отклонения. Система координат камеры смещается от состояния, продемонстрированного на фиг.3C, к состоянию, продемонстрированному на фиг.3B, поэтому компонент гравитационного ускорения в направлении оси X в неподвижном состоянии изменяется с уровня (sin α)∙g, как продемонстрировано на фиг.3C, на уровень 0 g, как продемонстрировано на фиг.3B, до и после отклонения.
[0036] Фиг.4C демонстрирует форму волны сигнала, обозначающую изменение во времени в компоненте ускорения в направлении оси X, обнаруженном посредством датчика 1018 обнаружения встряхивания, когда камера отклоняется вверх, а затем отклоняется вниз. Как может быть видно из сравнений между фиг.4A по фиг.4C, форма волны сигнала, продемонстрированная на фиг.4C, представляет собой почти сумму форм волны сигнала, продемонстрированных на фиг.4A и фиг.4B. Пик 505, продемонстрированный на фиг.4C, представляет собой пик ускорения, который появляется по выполнении операции отклонения вверх. Пик 506 представляет собой пик ускорения, который появляется по сложению замедления при отклонении вверх и ускорения при отклонении вниз, когда отклонение вниз должно начинаться после окончания отклонения вверх. Пик 507 представляет собой пик ускорения, который появляется при замедлении в конце операции вниз. Пик 505, обозначающий ускорение в начале отклонения вверх, определяется как первая форма волны ускорения, пик 506, обозначающий сложение ускорений в конце отклонения вверх и в начале отклонения вниз, определяется как вторая форма волны ускорения, а пик 507, обозначающий ускорение в конце отклонения вниз, определяется как третья форма волны ускорения.
[0037] Среди других, пик 506, определенный как вторая форма волны ускорения, обладает вероятностью увеличиваться посредством гравитационного ускорения и, вследствие этого, может эффективно использоваться, когда операция отклонения камеры обнаруживается на основе ускорения. Хотя фиг.4C демонстрирует форму волны сигнала ускорения, обнаруженного при операции отклонения камеры вверх один раз и затем отклонения ее вниз, форма волны сигнала из фазы, продемонстрированной на фиг.4C, обнаруживается при операции отклонения камеры вниз один раз и затем отклонения ее вверх.
[0038] Фиг.5A демонстрирует пример формы волны сигнала компонента ускорения в направлении оси X, обнаруженного посредством датчика 1018 обнаружения встряхивания (датчика ускорения в настоящем варианте осуществления), когда камера отклоняется вверх и затем отклоняется вниз, как на фиг.4C. Абсцисса обозначает время, ордината обозначает выход датчика 1018 обнаружения встряхивания, а каждый знак обозначает направление ускорения.
[0039] Пороги A и -A, определяемые в качестве первых порогов, используются для определения того, является ли камера в настоящем варианте осуществления движущейся. Более конкретно, блок 1019 определения встряхивания определяет, что камера является неподвижной, если абсолютное значение ускорения, обнаруженного посредством датчика 1018 обнаружения встряхивания, попадает в пределы диапазона порога A или является меньшим, и определяет, что камера является движущейся, если абсолютное значение ускорения является равным или большим, чем первый порог.
[0040] Также, для определения того, отклоняется ли камера с предварительно определенными характеристиками отклонения, используются пороги B и -B, определяемые в качестве вторых порогов. Пороги A, -A, B, и -B устанавливаются с целью удовлетворения отношениям: Порог -B<Порога -A и Порог A<Порога B. Если абсолютное значение ускорения, обнаруженного посредством датчика 1018 обнаружения встряхивания, является большим или равным порогу A и является меньшим, чем порог B, блок 1019 определения встряхивания определяет, что камера является движущейся, но не отклоняется с предварительно определенными характеристиками отклонения. С другой стороны, если абсолютное значение ускорения, обнаруженного посредством датчика 1018 обнаружения встряхивания, является большим или равным порогу B, блок 1019 определения встряхивания определяет, что камера является движущейся и отклоняется с предварительно определенными характеристиками отклонения.
[0041] Более того, для определения того, отклоняется ли камера в пределах предварительного определенного диапазона усилия, используются пороги C и -C, определяемые в качестве третьих порогов. Пороги B, -B, C, и -C устанавливаются с целью удовлетворения отношениям: Порог -C<Порога -B и Порог B<Порога C. Если абсолютное значение ускорения, обнаруженного посредством датчика 1018 обнаружения встряхивания является равным или большим, чем порог B и является меньшим, чем порог C, блок 1019 определения встряхивания определяет, что камера отклоняется с предварительно определенными характеристиками отклонения в пределах предварительного определенного диапазона усилия. С другой стороны, если абсолютное значение ускорения, обнаруженного посредством датчика 1018 обнаружения встряхивания, является равным или большим, чем порог C, блок 1019 определения встряхивания определяет, что камера отклоняется слишком сильно. В ситуации, когда камера сильно отклоняется, увеличивается возможность того, что пользователь по ошибке роняет ее из своей руки, поэтому, если определяется, что камера отклоняется слишком сильно, выдается предупреждение. В качестве способа предупреждения на блоке 1012 отображения изображения может отображаться предупреждающее сообщение, или посредством громкоговорителя может генерироваться предупреждающий звук.
[0042] Вместо сравнения абсолютного значения для значения ускорения с порогами, имеющими такое же самое абсолютное значение, блок 1019 определения встряхивания может осуществлять сравнение ускорения, обнаруженного посредством датчика 1018 обнаружения встряхивания, с положительными и отрицательными порогами. Предположим, например, что блок 1019 определения встряхивания осуществляет сравнение обнаруженного ускорения с первыми порогами. Если обнаруженное ускорение составляет от -A (не включая) до +A (не включая), блок 1019 определения встряхивания определяет, что камера является неподвижной (не отклоняется). С другой стороны, если обнаруженное ускорение составляет -A или меньше, или +A или больше, блок 1019 определения встряхивания определяет, что камера является движущейся. То же самое верно и для остающихся порогов.
[0043] Поскольку камера обладает вероятностью отклоняться более сильно при целевой операции, чем при операции ее подготовки, пик 302 с наибольшим абсолютным значением ускорения среди пиков от 301 до 303 в форме волны сигнала, продемонстрированной на фиг.5A, соответствует второй форме волны ускорения, продемонстрированной на фиг.4C. Другими словами, форма волны сигнала обозначает операцию отклонения вниз, когда операция отклонения камеры вниз является целевой, и операцию отклонения вверх, когда операция отклонения камеры вверх является целевой. В этом случае, пик 301 соответствует первой форме волны ускорения, продемонстрированной на фиг.4C, и обозначает ускорение при операции отклонения вверх, то есть, операции подготовки отклонения вниз, если целевой операцией является отклонение вниз. Также, пик 303 соответствует третьей форме волны ускорения, продемонстрированной на фиг.4C, и обозначает форму волны, получаемую по обнаружению замедления при отклонении вниз. Если целевая операция представляет собой операцию отклонения вверх, форма волны является двусторонне симметричной относительно оси X (имеет противоположные знаки относительно оси X), поэтому первая форма 301 волны ускорения и третья форма 303 волны ускорения обозначают отклонение вверх. Необходимо отметить, что форма волны с наибольшим абсолютным значением ускорения не всегда обозначает целевую операцию. Способ обнаружения целевой операции по настоящему изобретению будет описан позднее.
[0044] Ссылочная позиция 310 обозначает временную точку, когда первая форма 301 волны ускорения 301 пересекает порог A (или порог -A). Ссылочная позиция 311 обозначает временную точку, когда вторая форма 302 волны ускорения пересекает порог A (или порог -A) в первый раз; а ссылочная позиция 313 - временную точку, когда вторая форма 302 волны ускорения пересекает порог A (или порог -A) снова. Ссылочная позиция 314 обозначает временную точку, когда третья форма 303 волны ускорения пересекает порог A (или порог -A) снова после пересечения ее еще раз. Пороги S1 и S2 представляют собой пороги во время продолжительности t1, во время которой вторая форма волны ускорения, обозначающая целевую операцию (основную операцию) остается большей или равной порогу A, или меньшей или равной порогу -A. То есть, продолжительность t1 осуществляется от того момента, когда вторая форма 302 волны ускорения становится большей или равной порогу A, до тех пор пока она не станет равной порогу A снова (или от того момента, когда она становится меньшей или равной порогу -A, до тех пор пока она не станет равной порогу -A снова). В настоящем варианте осуществления, если условие: Порог S1≤Продолжительности t1≤Порогу S2 удовлетворяется, блок 1019 определения встряхивания определяет, что обнаруживается вторая форма волны ускорения (основная операция).
[0045] Также, если камера остается в состоянии, в котором она определяется как являющаяся неподвижной (в состоянии, в котором ускорение составляет величину от порога -A (не включая) до порога A (не включая)) в течение промежутка времени, равного или более длительного, чем порог E, блок 1019 определения встряхивания определяет, что камера находится в положении, в котором операция отклонения остановлена. В этом случае, если камера остается в состоянии, в котором она определяется как являющаяся неподвижной в течение промежутка времени, более короткого, чем порог E, блок 1019 определения встряхивания определяет, что операция, начатая во временной точке, когда ускорение становится большим или равным порогу A, или меньшим или равным порогу -A в первый раз, продолжается (одна операция отклонения выполнена).
[0046] Вследствие этого, блок 1019 определения встряхивания определяет, что, например, третья форма 303 волны ускорения, продемонстрированная на фиг.5A, обозначает операцию, осуществляющуюся непрерывно с операциями, обозначенными посредством первой формы 301 волны ускорения и второй формы 302 волны ускорения. Если состояние, в котором ускорение составляет величину от порога -A (не включая) до порога A (не включая), продолжается в течение промежутка времени, равного или более длительного, чем порог E, от временной точки 314, а затем ускорение становится меньшим или равным порогу -A, или большим или равным порогу A снова, блок 1019 определения встряхивания определяет, что начата новая операция.
Хотя в качестве порогов для уровня ускорения на фиг.5A используются три порога A, B и C каждый имеющие такое же самое абсолютное значение, один или более положительных или отрицательных порогов могут иметь различные абсолютные значения.
[0047] Фиг.5B представляет собой диаграмму, демонстрирующую изменение во времени в скорости изменения в сигнале ускорения, когда из выходного сигнала ускорения, продемонстрированного на фиг.5A, удаляется компонент смещения. Скорость изменения в сигнале ускорения может использоваться в качестве порога, используемого для определения того, является ли камера движущейся или неподвижной, который был описан со ссылкой на фиг.5A. В этом случае, вместо порогов ±A на фиг.5A, используются пороги THh и TH1. Необходимо отметить, что пороги THh и TH1 могут использоваться вместо порогов ±B или ±C на фиг.5A, а порог для скорости изменения в сигнале ускорения может определяться отдельно.
[0048] На основе выхода сигнала ускорения или скорости изменения в сигнале ускорения в направлении заданной оси, как продемонстрировано на фиг.5A или на фиг.5B, блок 1019 определения встряхивания определяет, осуществляется ли или нет встряхивание камеры относительно этой оси, и выдает результаты этого определения на системный контроллер 1014. На основе результатов определения, системный контроллер 1014 подтверждает действительность или недействительность задействования камеры посредством операционных устройств, включенных в операционный блок 1017.
[0049] <Процесс распознавания операции пользователя>
Фиг.6 представляет собой блок-схему последовательности операций, иллюстрирующую основные принципы процесса распознавания операции пользователя в течение режима ожидания захвата изображения для камеры в соответствии с настоящим вариантом осуществления.
Сначала, из выходных сигналов ускорения в направлении оси X датчика 1018 обнаружения встряхивания, блок 1019 определения встряхивания определяет, осуществляется ли или нет встряхивание камеры в направлении оси X (S8001). Блок 1019 определения встряхивания, использующий, например, размер, направление и частоту пиков в выходе сигнала ускорения или скорость изменения сигнала ускорения в направлении оси X в качестве опоры, определяет, осуществляется ли или нет встряхивание камеры в направлении оси X.
[0050] Более конкретно, в качестве примера, блок 1019 определения встряхивания определяет, что осуществляется встряхивание камеры в направлении оси X, каждый раз когда либо состояние, удовлетворяющее нижеследующим двум критериям, продолжается в течение определенного периода времени, либо предварительно определенное количество последовательных пиков удовлетворяет там же самым двум критериям:
(1) период, в течение которого пики в выходе сигнала ускорения или скорость изменения в сигнале ускорения в направлении оси X находятся вне предварительно определенного порогового диапазона (от A до -A, когда используется выход сигнала ускорения, или от THh до THl, когда используется скорость изменения в сигнале ускорения), является равным или меньшим, чем предварительно определенный период; и
(2) последовательные пики являются реверсированными.
[0051] В качестве одного другого примера, блок 1019 определения встряхивания
(a) определяет, что встряхивание обнаруживается, если скорость изменения в сигнале ускорения в направлении оси X выпадает из предварительно определенного порогового диапазона (например, скорости порогов ±A на фиг.5A); и
(b) определяет, что операция отклонения остановлена, когда состояние, в котором выход изменения в сигнале ускорения в направлении оси X попадает в пределы предварительно определенного порогового диапазона, продолжается в течение предварительно определенного времени (например, порога E на фиг.5A) или дольше, после того как в (а) определяется, что обнаружено встряхивание.
В течение отрезка времени от состояния, определенного посредством (а), до состояния, определенного посредством (b), даже если скорость изменения в сигнале ускорения в направлении оси X попадает в пределы предварительно определенного порогового диапазона (например, диапазона порогов ±A на фиг.5A), определяется, что операция находится в процессе осуществления.
[0052] Напротив, в том случае, если эти критерии не удовлетворяются, блок 1019 определения встряхивания определяет, что встряхивание камеры не осуществляется в направлении оси X. Блок 1019 определения встряхивания может также делать такое же самое определение для направления оси Y и направления оси Z. Необходимо отметить, что вышеописанный способ определения встряхивания представляет собой всего лишь один пример этого, и для определения наличия или отсутствия встряхивания могут использоваться другие способы.
[0053] В случае если определяется, что встряхивание камеры не осуществляется в направлении оси X, блок 1019 определения встряхивания определяет, осуществляется ли или нет встряхивание камеры в направлении оси Y из выходных сигналов ускорения в направлении оси Y датчика 1018 обнаружения встряхивания (S8002).
В случае если определяется, что встряхивание камеры не осуществляется в направлении оси Y также, блок 1019 определения встряхивания определяет, осуществляется ли или нет встряхивание камеры в направлении оси Z из выходных сигналов ускорения в направлении оси Z датчика 1018 обнаружения встряхивания (S8003).
[0054] Блок 1019 определения встряхивания выдает результаты определения относительно каждой оси на системный контроллер 1014. Затем, в том случае, если получаются результаты определения, которые обозначают наличие встряхивания в направлении какой-либо любой из осей, системный контроллер 1014 подтверждает недействительность задействования камеры посредством операционного блока 1017 (S8005). Когда операции посредством операционного блока 1017 подтверждаются как недействительные, системный контроллер 1014 игнорирует ввод от операционного блока 1017. Благодаря подобному действию, даже когда (например) пользователь при попытке ввести желаемую команду осуществляет встряхивание камеры и случайно задействует кнопку 2005 меню, переключатель режимов 2003 или тому подобное из операционного блока 1017, может предотвращаться непреднамеренный ввод через операционный блок 1017.
[0055] Однако, в настоящем варианте осуществления, задействование пусковой кнопки 2001, а именно, включающегося второго переключателя, не игнорируется системным контроллером 1014, даже когда задействование посредством операционного блока 1017 подтверждается как недействительное. Является ли задействование посредством операционного блока 1017 действительным или недействительным, может, например, сохраняться в качестве флажка в памяти 1016 RAM.
[0056] Необходимо отметить, что хотя это не описано конкретно в блок-схеме последовательности операций, продемонстрированной на фиг.6, в случае, когда встряхивание в направлении конкретной оси распознается как ввод команды или инструкции, системный контроллер 1014 выполняет процесс распознавания на основе результатов обнаружения, выдаваемых посредством блока 1019 определения встряхивания. Затем, системный контроллер 1014 выполняет операцию в соответствии с распознанной командой или инструкцией.
[0057] Блок 1019 определения встряхивания может выдавать результаты определения при каждом определении относительно каждой из осей, либо он может выдавать комбинированное определение для всех осей. В дополнение к этому, блок 1019 определения встряхивания может выдавать результаты определения только относительно той оси или осей, относительно которых определяется, что в наличии имеется встряхивание (то есть, если не имеется оси, относительно которой определяется, что в наличии имеется встряхивание, не выдается никакого результата определения). В качестве альтернативы, в случае, когда определяется, что в наличии имеется встряхивание относительно одной оси, блок 1019 определения встряхивания может опускать обработку определения для оставшихся осей (исключая те варианты, в которых в качестве ввода команды к распознаванию устанавливается конкретная комбинация направлений встряхивания).
[0058] В случае, если определяется, что встряхивание камеры относительно какой-либо любой из осей не осуществляется, системный контроллер 1014 подтверждает действительность задействования камеры посредством операционного блока 1017 (S8004). Необходимо отметить, что обычно операционный блок 1017 является действительным. В соответствии с этим, если только задействование операционного блока 1017 не было подтверждено как недействительное, для системного контроллера 1014 на этапе S8004 не является конкретно необходимым выполнять обработку в целях подтверждения действительности его задействования.
[0059] Системный контроллер 1014 определяет, была ли или нет введена команда на начало захвата изображения, то есть, системный контроллер 1014 определяет, является ли или нет включенным второй переключатель пусковой кнопки 2001 (S8006). В случае, если второй переключатель является выключенным, обработка повторяется от этапа S8001. В ситуации, когда второй переключатель является включенным, системный контроллер 1014 осуществляет процесс захвата изображения, даже если задействование камеры посредством операционного блока 1017 подтверждается как недействительное (S8007).
[0060] Другими словами, в камере по настоящему варианту осуществления, в случае, когда обнаруживается, что второй переключатель пусковой кнопки 2001 включен, выполняется захват изображения. Это происходит потому, что существует большая вероятность того, что операция с полным нажатием пусковой кнопки 2001, посредством которой включается второй переключатель, обладает вероятностью не являться ошибочной операцией, но быть намеренной операцией. Напротив, первый переключатель, включающийся посредством операции половинчатого нажатия пусковой кнопки 2001, игнорируется, когда операционный блок 1017 подтверждается как недействительный. Однако до тех пор, пока первый переключатель поддерживается во включенном состоянии, обнаружение встряхивания камеры относительно какой-либо любой из оси X, оси Y и оси Z больше не осуществляется, а когда задействование камеры посредством операционного блока 1017 подтверждается как действительное, включение первого переключателя также подтверждается как действительное. Затем, системный контроллер 1014, в ответ на включение первого переключателя, начинает такие операции подготовки захвата изображения, как AE и AF.
[0061] Таким образом, как описано выше, в камере, которая предоставляет возможность ввода инструкций и команд посредством встряхивания устройства, настоящее изобретение может уменьшить ввод не подразумеваемых пользователем команд посредством непреднамеренного задействования кнопок или клавиш в ситуации, когда осуществляется встряхивание устройства.
[0062] Второй вариант осуществления
Отличительный признак настоящего варианта осуществления заключается в том, что пользователь осуществляет отклонение переносного устройства (например, камеры, в которой устанавливаемым является по меньшей мере один из: режима воспроизведения и режима захвата изображения) с целью обеспечения возможности команды приближения и удаления изображения, воспроизводимого посредством переносного устройства. Пользователь может наблюдать изображение, записанное на среде 1010 записи, через, например, блок 1012 отображения изображения посредством, например, установки переносного устройства в режим воспроизведения. Необходимо отметить, что в качестве примера переносного устройства в соответствии с настоящим вариантом осуществления использована камера, описанная в первом варианте осуществления. Вследствие этого, описание, например, конфигурации аппаратного оборудования и способа обнаружения операции отклонения опускаются. В настоящем варианте осуществления также, определение, связанное с операцией отклонения камеры, выполняется посредством обнаружения ускорения в направлении оси X.
[0063] Фиг.7 представляет собой блок-схему последовательности операций для пояснения процесса, связанного с одной операцией отклонения. Сначала, системный контроллер 1014 определяет, установлена ли камера в режим воспроизведения (S700). Если определяется, что режим воспроизведения установлен, системный контроллер 1014 выполняет процессы на этапе S701, а также на последующих этапах. Если ускорение, обнаруженное посредством датчика 1018 обнаружения встряхивания, пересекает порог A или -A на фиг.5A (временная точка 310, продемонстрированная на фиг.5A), блок 1019 определения встряхивания обнаруживает, что камера сдвинулась с места (S701). Если блок 1019 определения встряхивания обнаруживает, что камера сдвинулась с места (отклонена), системный контроллер 1014 подтверждает недействительность задействования камеры посредством операционного блока 1017 (S702).
[0064] Обнаружение ускорения выполняется в период обнаружения, предварительно определенный для датчика 1018 обнаружения встряхивания. Также, блок 1019 определения встряхивания сохраняет значение обнаружения, полученное посредством датчика 1018 обнаружения встряхивания, и обновляет пиковое значение (минимальное значение), сохраняемое каждый раз, когда предыдущее пиковое значение (минимальное значение) обновляется, до значения обнаружения, получаемого для каждого периода обнаружения после того, как значение обнаружения падает ниже порога -A во временной точке 310. Вследствие этого, блок 1019 определения встряхивания может измерять пиковое значение (минимальное значение) для значения обнаружения после того, как значение обнаружения падает ниже порога -A. Блок 1019 определения встряхивания может также измерять верхнее пиковое значение (максимальное значение) таким же самым способом.
[0065] Когда на этапе S701 обнаруживается, что камера сдвинулась с места, и на этапе S702 начинается процесс обнаружения операции, блок 1019 определения встряхивания сначала обнаруживает первую форму волны ускорения. Когда ускорение, обнаруженное посредством датчика 1018 обнаружения встряхивания, пересекает порог A или -A после того, как обнаруживается, что камера сдвинулась с места, блок 1019 определения встряхивания определяет, что обнаружена первая форма волны ускорения.
[0066] Когда первая форма волны ускорения обнаружена, блок 1019 определения встряхивания затем выполняет процесс обнаружения второй формы волны ускорения. Когда обнаруженное ускорение пересекает порог A (или порог -A) (временная точка 311), блок 1019 определения встряхивания обнаруживает начало второй формы волны ускорения. Когда обнаруженное ускорение пересекает порог A (или порог -A) снова во время продолжительности t1, удовлетворяющей условию: Порог S1≤Продолжительности t1≤Порогу S2 (временная точка 313), блок 1019 определения встряхивания обнаруживает конец второй формы волны ускорения. Как описано выше, если продолжительность t1 не удовлетворяет вышеупомянутому условию, блок 1019 определения встряхивания не определяет, что обнаружена вторая форма волны ускорения. Дополнительно, если обнаруженное ускорение пересекает порог B (или порог -B) (временная точка 312) и не достигает порога C (или порога -C) от временной точки 311 до временной точки 313, блок 1019 определения встряхивания определяет, что камера отклонена корректно (отклонена с предварительно определенным усилием) («Да» на этапе S703).
[0067] Также, на основе знака порога B, который пересекает вторая форма волны ускорения, блок 1019 определения встряхивания распознает, отклонена ли камера вверх или вниз. С другой стороны, если вторая форма волны ускорения не пересекает порог B (или порог -B) или достигает порога C (или порога -C), блок 1019 определения встряхивания определяет, что камера не отклонена корректно («Нет» на этапе S703). В этом случае, блок 1019 определения встряхивания на этапе S710 распознает, является ли абсолютное значение операции отклонения (абсолютное значение обнаруженного ускорения) большим, чем предварительно определенное значение (пороги ±C на фиг.5). Если пиковое значение второй формы волны ускорения падает ниже порога B (или порога -B), блок 1019 определения встряхивания заканчивает обнаружение операции отклонения (S708). Системный контроллер 1014 подтверждает действительность задействования посредством операционного блока 1017 (S709). С другой стороны, если пиковое значение второй формы волны ускорения достигает порога C (или порога -C), блок 1019 определения встряхивания выдает предупреждение, как описано выше (S711). Процессы на этапе S708 и на последующих этапах осуществляются, как описано выше.
[0068] Необходимо отметить, что вторую форму волны ускорения необходимо обнаруживать на основе порога, отличного по знаку от порога, используемого при обнаружении первой формы волны ускорения. Если, например, первая форма волны ускорения обнаруживается на основе порога -A (если обнаруживается первая форма волны ускорения с вогнутым пиком), вторую форму волны ускорения необходимо обнаруживать на основе порога A. Это происходит постольку, поскольку первая форма волны ускорения соответствует операции подготовки перед основной операцией, а основная операция является обратной по отношению к операции подготовки.
[0069] Если блок 1019 определения встряхивания на этапе S703 определяет, что камера отклонена корректно, системный контроллер 1014 изменяет изображение, отображенное на блоке 1012 отображения изображения через посредство блока 1013 управления отображением во временной точке, в которой обнаружена вторая форма волны ускорения (S704). Конец второй формы волны ускорения обнаруживается во временной точке (временная точка 313, продемонстрированная на фиг.5), в которой вторая форма волны ускорения пересекает порог A (или порог -A) снова. При изменении назначенного к отображению изображения, изображения могут изменяться в порядке имени файла или числа, в порядке даты/времени захвата изображения, либо в порядке даты/времени записи на среде 1010 записи. Порядок изменения изображения может переключаться между направлениями вперед и назад, в зависимости от знака порога, использованного при обнаружении первой или второй формы волны ускорения. Тем не менее, в ситуации, когда устанавливается режим, при котором изображения отображаются в произвольном порядке, как при произвольном воспроизведении, назначенное к отображению изображение изменяется независимо от знака порога.
[0070] На этапе S705, блок 1019 определения встряхивания определяет, попадает ли ускорение, обнаруженное посредством датчика 1018 обнаружения встряхивания, в пределы диапазона от порога -A (не включая) до порога A (не включая). В то время как обнаруженное ускорение остается в пределах диапазона от порога -A (не включая) до порога A (не включая), блок 1019 определения встряхивания измеряет продолжительность встряхивания t2 (S706). Блок 1019 определения встряхивания определяет, является ли продолжительность встряхивания t2 равной или более длительной, чем порог E (S707). Если продолжительность встряхивания t2 является равной или более длительной, чем порог E, блок 1019 определения встряхивания определяет, что камера пришла в состояние покоя, и обнаружение операции отклонения заканчивается (S708). Системный контроллер 1014 подтверждает действительность задействования посредством операционного блока 1017 (S709).
[0071] При таком способе, задействование камеры посредством операционного блока 1017 не подтверждается как действительное, если только состояние, в котором значение (абсолютное значение) ускорения является меньшим предварительно определенного значения, не продолжается в течение предварительно определенного времени или более после того, как определяется, что камера сдвинулась с места. В примере, продемонстрированном на фиг.5A, блок 1019 определения встряхивания определяет, что операция отклонения находится в процессе осуществления до тех пор, пока от временной точки 310 до временной точки 314 проходит предварительно определенное время E. Вследствие этого, даже если выход сигнала ускорения в направлении оси X попадает в пределы диапазона порогов ±A, задействование посредством операционного блока 1017 подтверждается как недействительное до тех пор, пока это состояние продолжается в течение отрезка времени, равного порогу E.
[0072] С другой стороны, если на этапе S705 определяется, что обнаруженное ускорение является меньшим или равным порогу -A, или большим или равным порогу A, блок 1019 определения встряхивания инициирует продолжительность встряхивания t2 (S712). Процесс возвращается к этапу S705, на котором блок 1019 определения встряхивания снова определяет, попадает ли абсолютное значение обнаруженного ускорения в пределы диапазона, меньшего, чем порог A.
[0073] Также, если абсолютное значение обнаруженного ускорения является меньшим, чем порог A, но продолжительность встряхивания t2 является меньшей, чем порог E («Нет» на этапе S707), блок 1019 определения встряхивания повторяет процессы на этапе S705, а также последующие этапы, в то же время увеличивая значение продолжительности встряхивания t2.
[0074] Как описано выше, в настоящем варианте осуществления, даже если абсолютное значение обнаруженного ускорения является меньшим, чем первый порог (меньшим, чем порог A), определяется, что операция от временной точки, в которой обнаруженное ускорение достигает порога A или -A вначале, продолжается (одна операция отклонения осуществлена), если только это состояние не продолжается в течение отрезка времени, равного или более длительного, чем порог E. Это делает возможным предотвращение определения того, что третья форма волны ускорения соответствует новой операции отклонения.
[0075] Когда обнаруженное ускорение камеры в соответствии с настоящим вариантом осуществления является большим или равным предварительно определенному значению, но, тем не менее, действует во временных рамках, то есть, слишком коротко или слишком долго, либо действует с большой силой, определяется ошибка с целью предотвращения обнаружения того, что операция отклонения находится в процессе осуществления. Таким образом, форма волны обнаруживается с более высокой точностью с целью обеспечения обладающей интуицией, дружелюбной операционной системы. Также, если неподвижное состояние не продолжается в течение предварительно определенного времени или дольше, определяется, что продолжается одна операция отклонения, делая там самым возможным точное обнаружение первой, второй и третьей форм волны ускорения, соответствующих серии операций от операции подготовки до основной операции.
[0076] Как было описано выше, в соответствии с настоящим вариантом осуществления, возможным является обеспечение камеры, которая может менять изображение посредством отклонения камеры в конкретном направлении, в то время как это изображение является отображаемым, как, например, при режиме воспроизведения. Также, даже если пользователь по ошибке задействует операционный блок при операции отклонения камеры, непреднамеренные команды не отображаются.
[0077] В настоящем варианте осуществления, случай, когда функция изменения изображения дисплея назначается для операции отклонения, в то время как изображение является отображаемым в режиме воспроизведения, был взят в качестве одного примера процесса для обнаружения операции отклонения. Однако такой же самый процесс обнаружения может выполняться, когда функция, связанная с захватом изображения в режиме захвата изображения, также назначается для операции отклонения. То есть, как только определяется, что камера сдвинулась с места, задействование посредством операционного блока не подтверждается как действительное, если только состояние, в котором значение (абсолютное значение) ускорения является меньшим, чем предварительно определенное значение, не продолжается в течение предварительно определенного времени или более.
[0078] Также, в первом варианте осуществления, захват изображения осуществляется, когда обнаруживается, что включен второй переключатель пусковой кнопки 2001. В противоположность этому, в настоящем варианте осуществления, камера может переходить от режима воспроизведения в режим захвата изображения, когда задействуется пусковая кнопка 2001, например, в режиме воспроизведения. В это время, первый переключатель, включающийся посредством операции нажатия пусковой кнопки 2001 наполовину, может в режиме воспроизведения игнорироваться, а переход от режима воспроизведения в режим захвата изображения может осуществляться, когда определяется, что включен второй переключатель пусковой кнопки 2001. В этом случае, до тех пор пока первый переключатель поддерживается во включенном состоянии, встряхивание камеры относительно какой-либо любой из оси X, оси Y и оси Z долее не определяется, а когда задействование камеры посредством операционного блока 1017 подтверждается как действительное, включение первого переключателя также подтверждается как действительное.
[0079] Третий вариант осуществления
Далее дается описание третьего варианта осуществления настоящего изобретения. Конфигурация камеры по настоящему варианту осуществления может быть такой же самой, как и конфигурация по первому варианту осуществления, и вследствие этого описание конфигурации камеры опускается. Отличительный признак настоящего варианта осуществления заключается в том, что, в зависимости от положения камеры (положение портрета или положение ландшафта) и направления обнаруживаемого встряхивания операционного блока 1017, подтверждение действительности/ недействительности тех операционных устройств, которые обеспечиваются на верхней поверхности камеры, и тех операционных устройств, которые обеспечиваются на задней поверхности камеры, осуществляется раздельно. Необходимо отметить, что, в настоящем варианте осуществления, операционные устройства, назначенные к подтверждению действительности/недействительности, не обязательно должны являться устройствами, обеспечиваемыми на верхней поверхности или на задней поверхности камеры, но могут являться операционными устройствами, обеспечиваемыми на какой-либо любой поверхности корпуса камеры. То есть, настоящий вариант осуществления является применимым к операционным устройствам, обеспечиваемым на какой-либо любой одной поверхности и на какой-либо одной другой поверхности операционных устройств, обеспечиваемых на по меньшей мере двух поверхностях корпуса камеры.
[0080] Фиг.8A и фиг.8B представляют собой блок-схемы последовательности операций для пояснения основных принципов процесса распознавания операции пользователя в режиме захвата изображения камеры в соответствии с третьим вариантом осуществления настоящего изобретения.
Сначала, из выхода датчика 1021 обнаружения положения портрета/ландшафта, системный контроллер 1014 определяет ориентацию камеры (S9001). На данном этапе, если камера находится в обычном положении или развернутом положении (положении разворота на 180 градусов по отношению к обычному положению относительно оптической оси оптической системы 1001), блок 1019 определения встряхивания определяет, осуществляется ли или нет встряхивание камеры в направлении оси X (S9002). Если определяется, что осуществляется встряхивание камеры в направлении оси X, тогда из операционных устройств, включенных в операционный блок 1017, системный контроллер 1014 подтверждает недействительность задействования тех, которые обеспечиваются на верхней поверхности камеры, и подтверждает действительность задействования тех, которые обеспечиваются на задней поверхности камеры (S9003). Это осуществляется, поскольку в случае, когда осуществляется встряхивание камеры в направлении оси X, существует большая вероятность того, что операционные устройства, обеспечиваемые на верхней поверхности камеры, были случайно задействованы.
[0081] Затем, системный контроллер 1014 определяет, является ли или нет включенным второй переключатель пусковой кнопки 2001 (S9004), и, если он является включенным, осуществляет операцию захвата изображения (S9008). В случае если второй переключатель пусковой кнопки 2001 является выключенным, системный контроллер 1014 определяет, были ли или нет задействованы операционные устройства на верхней поверхности камеры (S9005). Если операционные устройства на верхней поверхности камеры не были задействованы, системный контроллер 1014 возвращает обработку на этап определения ориентации камеры (S9001).
[0082] С другой стороны, если операционные устройства на верхней поверхности камеры были задействованы, системный контроллер 1014 определяет, является ли или нет включенным второй переключатель пусковой кнопки 2001 (S9006), и если он является включенным, осуществляет операцию захвата изображения (S9008). Если второй переключатель пусковой кнопки 2001 является выключенным, системный контроллер 1014 определяет, истекло ли или нет предварительно определенное время с тех пор, как на этапе S9005 было обнаружено задействование операционных устройств на верхней поверхности камеры (S9007). Если предварительно определенный период времени не истек, системный контроллер 1014 продолжает этап определения S9006. Если предварительно определенное время истекло, системный контроллер 1014 возвращает обработку на этап определения ориентации камеры (S9001).
[0083] На этапе S9002, в случае, когда определение того, что осуществляется встряхивание камеры в направлении оси X, не было получено, блок 1019 определения встряхивания определяет, осуществляется ли или нет встряхивание камеры в направлениях оси Y или оси Z (S9009). Если определяется, что встряхивание камеры либо в направлении оси Y, либо в направлении оси Z не осуществляется, системный контроллер 1014 подтверждает действительность задействования всех операционных устройств, включенных в операционный блок 1017 (S9013) и возвращает обработку к этапу S9001. С другой стороны, если определяется, что осуществляется встряхивание камеры в направлениях оси Y или оси Z, системный контроллер 1014 подтверждает действительность задействования операционных устройств, обеспечиваемых на верхней поверхности камеры, а также подтверждает недействительность задействования операционных устройств, обеспечиваемых на задней поверхности камеры (S9010). Это осуществляется, поскольку, в случае, когда осуществляется встряхивание камеры в направлениях оси Y или оси Z, существует большая вероятность того, что операционные устройства, обеспечиваемые на задней поверхности камеры, были задействованы случайно.
[0084] Затем системный контроллер 1014 определяет, является ли или нет включенным второй переключатель пусковой кнопки 2001 (S9011), и если он является включенным, осуществляет операцию захвата изображения (S9008). Если второй переключатель пусковой кнопки 2001 является выключенным, системный контроллер 1014 определяет, были ли задействованы операционные устройства на задней поверхности камеры (S9012). Если операционные устройства на задней поверхности камеры не были задействованы, системный контроллер 1014 возвращает обработку на этап определения ориентации камеры (S9001).
Если операционные устройства на задней поверхности камеры были задействованы, системный контроллер 1014 осуществляет описанные выше процессы от этапа S9006 и далее.
[0085] На этапе S9001, в том случае, если ориентация камеры является отличной от обычного положения или развернутого положения, тогда существует вероятность того, что ориентация камеры является такой, что захват камеры осуществляется наверху или внизу (обычно, в положениях поворота на 90 градусов или -90 градусов от обычного положения относительно оптической оси линзы). В этом случае, осуществляется ли или нет встряхивание камеры в одном из направлений: оси X, оси Y или оси Z, определяется посредством блока 1019 определения встряхивания (S9014). Если относительно какой-либо любой из этих осей встряхивания не обнаруживается, системный контроллер 1014 подтверждает действительность задействования всех операционных устройств, включенных в операционный блок 1017 (S9013) и возвращает обработку к этапу S9001. С другой стороны, если относительно какой-либо любой из этих осей обнаруживается встряхивание, системный контроллер 1014 подтверждает действительность задействования операционных устройств, обеспечиваемых на верхней поверхности камеры, и подтверждает недействительность задействования операционных устройств, обеспечиваемых на задней поверхности камеры (S9015). Это осуществляется постольку, поскольку в случае, когда ориентация камеры является такой, что захват камеры осуществляется наверху или внизу, то, если осуществляется встряхивание камеры в каком-либо любом из этих направлений, существует большая вероятность того, что операционные устройства, обеспечиваемые на задней поверхности камеры, были задействованы случайно.
[0086] После этого, на этапе S9016 и на этапе S9017, системный контроллер 1014 осуществляет такие же самые процессы, что и процессы на этапе S9011 и на этапе S9012.
[0087] Таким образом, как описано выше, в настоящем варианте осуществления, подтверждение действительности/недействительности задействования операционных устройств, обеспечиваемых на верхней поверхности камеры, и задействования операционных устройств, обеспечиваемых на задней поверхности камеры, осуществляется раздельно, в зависимости от ориентации камеры и направления встряхивания камеры. В качестве результата, в дополнение к полезному эффекту первого варианта осуществления, становится возможным осуществление точного управления, проводя различия между операционными устройствами, подверженными непреднамеренному задействованию, и операционными устройствами, не подверженными непреднамеренному задействованию.
[0088] Необходимо отметить, что в настоящем варианте осуществления так же, как и в первом варианте осуществления, в случае, когда на этапе S9002 и на этапе S9009 обнаруживается встряхивание в направлениях оси X, оси Y или оси Z, системный контроллер 1014 может распознавать его в качестве инструкции или команды, заранее скоррелированной с направлением встряхивания (или их комбинацией). Затем системный контроллер 1014 осуществляет операцию, соответствующую распознанной инструкции или команде.
[0089] Модификация третьего варианта осуществления
В качестве модификации третьего варианта осуществления, в режиме воспроизведения доступным также является режим, в котором второй и третий варианты осуществления являются скомбинированными. То есть, доступным является способ подтверждения недействительности задействования посредством операционного устройства камеры в соответствии с ориентацией и направлением отклонения, как в третьем варианте осуществления. В этом случае, время, когда обнаруживается операция отклонения, определяется в качестве времени подтверждения недействительности. То есть, определяется, что операция отклонения является начатой, когда выход сигнала ускорения попадает вне предварительно определенного диапазона порога (например, диапазона порогов ±A или менее на фиг.5A), и определяется, что операция озаглавливания является остановленной, когда состояние, в котором выход сигнала ускорения попадает в пределы предварительно определенного диапазона порога, продолжается в течение предварительно определенного времени (например, порога E на фиг.5A) или более. В этом случае, определение на этапе S701 по фиг.7 выполняется для каждого осевого направления (этап S9002 и этап S9009 на фиг.8A и этап S9014 на фиг.8B), и процесс подтверждения недействительности операционного блока на этапе S702 по фиг.7 выполняется в соответствии с поверхностью (этап S9003 и этап S9010 на фиг.8A и этап S9015 на фиг.8B).
[0090] Другие варианты осуществления
В первом и в третьем вариантах осуществления, описанных выше, из операций операционных устройств, операция, соответствующая команде на начало захвата изображения (полное нажатие пусковой кнопки 2001) представляет собой операцию, которая не подтверждается как недействительная. Однако, операция, соответствующая команде на начало захвата изображения, может также подтверждаться как недействительная. В этом случае, на этапе S8005 по первому варианту осуществления, задействование всех операционных устройств подтверждается как недействительное, и на этапе S9003 по третьему варианту осуществления, как недействительное подтверждается задействование операционных устройств, обеспечиваемых на верхней поверхности камеры, включая полное нажатие пусковой кнопки 2001.
[0091] Аспекты настоящего изобретения могут также быть реализованы посредством компьютера системы или устройства (или устройств, таких как CPU или MPU), который(ое) считывает и выполняет программу, записанную на устройстве памяти, с целью выполнения функций вышеописанного(ых) варианта(ов) осуществления, а также посредством способа, этапы которого выполняются компьютером системы или устройством посредством, например, считывания и выполнения программы, записанной на устройстве памяти, с целью выполнения функций вышеописанного(ых) варианта(ов) осуществления. С этой целью, на компьютер, например, через посредство сети, или от записывающей среды различных типов, служащей в качестве устройства памяти (например, считываемой компьютером среды), обеспечивается программа.
[0092] В то время как настоящее изобретение было описано со ссылкой на иллюстративные варианты осуществления, необходимо понимать, что данное изобретение не ограничивается до раскрытых иллюстративных вариантов осуществления. Объем нижеследующей формулы изобретения должен соответствовать наиболее широкой интерпретации, так чтобы охватывать все такие модификации, эквивалентные структуры и функции. Более того, настоящее изобретение не ограничивается устройством осуществления изобретения. Более конкретно, каждый из описанных выше иллюстративных вариантов осуществления настоящего изобретения может осуществляться на электронном устройстве или устройстве связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ УПРАВЛЕНИЯ ДЛЯ НЕГО, ПРОГРАММА И НОСИТЕЛЬ ЗАПИСИ ИНФОРМАЦИИ | 2010 |
|
RU2501065C2 |
| СОВМЕСТНАЯ АВТОРСКАЯ ПОДГОТОВКА ДОКУМЕНТА | 2008 |
|
RU2501077C2 |
| АГРЕГАЦИЯ 3D КОНТЕНТА, ВСТРОЕННАЯ В УСТРОЙСТВА | 2009 |
|
RU2491638C2 |
| СПОСОБ, УСТРОЙСТВО И ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ОПИСАТЕЛЬНОЙ ИНФОРМАЦИИ | 2015 |
|
RU2610242C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2011 |
|
RU2498521C2 |
| РАСПОЗНАВАНИЕ АУДИОПОСЛЕДОВАТЕЛЬНОСТИ ДЛЯ АКТИВАЦИИ УСТРОЙСТВА | 2012 |
|
RU2616553C2 |
| Интервенционная хирургическая роботизированная система, способ управления и носитель данных | 2022 |
|
RU2806087C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2545507C2 |
| БИОПРИВЯЗКА ДЛЯ АУТЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2015 |
|
RU2737509C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2458401C2 |
Изобретение относится к устройству захвата изображения и способу управления им. Техническим результатом является обеспечение устройства для захвата изображения и способа управления им, которые не допускают ввод непреднамеренных команд в указанное устройство даже в ситуации, когда пользователь осуществляет встряхивание устройства для захвата изображения с целью ввода желаемой команды и случайно задействует операционное устройство, такое как кнопка или подобное средство. Устройство для захвата изображения содержит операционное средство для обеспечения пользователю возможности ввода команды в данное устройство, при этом операционное средство обеспечивается на по меньшей мере двух поверхностях устройства; средство обнаружения встряхивания для обнаружения ускорения встряхивания, примененного к устройству; средство обнаружения операции для обнаружения встряхивания, примененного пользователем для выполнения предварительно определенного процесса от выхода средства обнаружения встряхивания; и средство управления для подтверждения недействительности операции по меньшей мере части операционного средства, когда является обнаруженным встряхивание, примененное пользователем, при этом средство управления подтверждает недействительность операционного средства, обеспеченного на одной поверхности устройства, отдельно от операционного средства, обеспеченного на другой поверхности устройства. 4 н. и 14 з.п. ф-лы, 15 ил.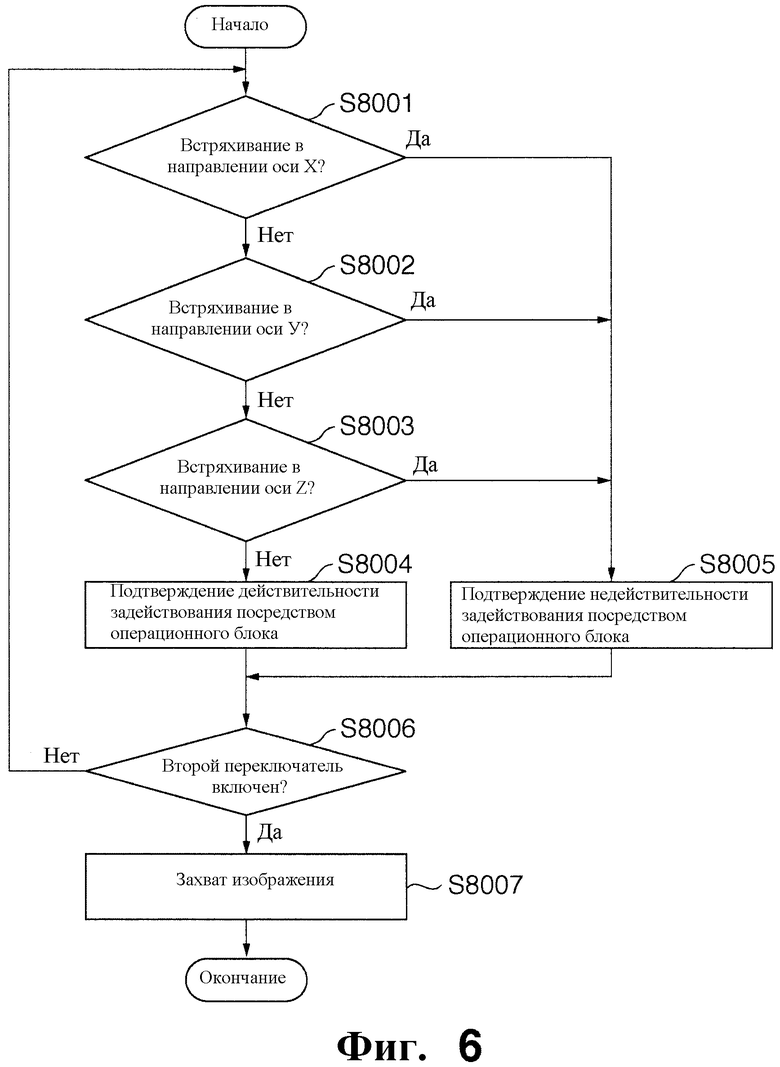
1. Устройство для захвата изображения, содержащее:
операционное средство для обеспечения пользователю возможности ввода команды в данное устройство, при этом операционное средство обеспечивается на по меньшей мере двух поверхностях устройства;
средство обнаружения встряхивания для обнаружения ускорения встряхивания, примененного к устройству;
средство обнаружения операции для обнаружения встряхивания, примененного пользователем для выполнения предварительно определенного процесса от выхода средства обнаружения встряхивания; и
средство управления для подтверждения недействительности операции по меньшей мере части операционного средства, когда является обнаруженным встряхивание, примененное пользователем, при этом средство управления подтверждает недействительность операционного средства, обеспеченного на одной поверхности устройства, отдельно от операционного средства, обеспеченного на другой поверхности устройства.
2. Устройство по п.1, дополнительно содержащее:
средство определения направления для определения направления встряхивания, примененного пользователем и обнаруженного посредством средства обнаружения операции; и
средство определения ориентации для определения ориентации устройства,
причем средство управления подтверждает недействительность по меньшей мере части операционного средства на основе данной обнаруженной ориентации и данного обнаруженного направления встряхивания.
3. Устройство по одному из пп.1 и 2, в котором операционное средство содержит пусковую кнопку для побуждения устройства начать захват изображения, и средство управления не подтверждает недействительность операции данной пусковой кнопки, когда пусковая кнопка задействуется, даже когда посредством средства обнаружения операции обнаружено встряхивание, примененное пользователем.
4. Устройство по одному из пп.1 и 2, в котором
устройство дополнительно содержит средство управления отображением, которое отображает захваченное изображение на дисплее и может устанавливать режим захвата изображения, в котором осуществляется захват изображения, и режим воспроизведения, в котором изображение, захваченное в режиме захвата изображения, отображается на дисплее, и
когда режим воспроизведения установлен, и средство обнаружения операции обнаруживает встряхивание, примененное пользователем, средство управления отображением изменяет назначенное к отображению изображение на дисплее.
5. Устройство для захвата изображения, имеющее операционное средство для обеспечения пользователю возможности ввода команды в данное устройство, причем устройство содержит:
средство обнаружения встряхивания для обнаружения ускорения встряхивания, примененного к устройству;
средство обнаружения операции для обнаружения встряхивания, примененного пользователем для выполнения предварительно определенного процесса от выхода средства обнаружения встряхивания; и
средство управления для подтверждения недействительности операции по меньшей мере части операционного блока, в то время, как осуществляется обнаружение встряхивания, примененного пользователем, при этом период, в который посредством средства обнаружения операции осуществляется обнаружение встряхивания, примененного пользователем, составляет промежуток от того, когда абсолютное значение выхода средства обнаружения встряхивания становится не меньшим, чем первый порог, до тех пор, пока предварительно определенное время не истечет после того, как абсолютное значение выхода средства обнаружения встряхивания станет меньшим, чем первый порог.
6. Устройство по п.5, дополнительно содержащее:
средство определения направления для определения направления встряхивания, примененного пользователем и обнаруженного посредством средства обнаружения операции; и
средство определения ориентации для определения ориентации устройства,
причем средство управления подтверждает недействительность по меньшей мере части операционного средства на основе данной обнаруженной ориентации и данного обнаруженного направления встряхивания.
7. Устройство по п.6, в котором операционное средство обеспечивается на по меньшей мере двух поверхностях устройства, и средство управления подтверждает недействительность операционного средства, обеспеченного на одной поверхности устройства, отдельно от операционного средства, обеспеченного на другой поверхности устройства.
8. Устройство по любому из пп.5-7, в котором операционное средство содержит пусковую кнопку для побуждения устройства начать захват изображения, и средство управления не подтверждает недействительность операции данной пусковой кнопки, когда пусковая кнопка задействуется даже когда посредством средства обнаружения операции обнаружено встряхивание, примененное пользователем.
9. Устройство по любому из пп.5-7, в котором
устройство дополнительно содержит средство управления отображением, которое отображает захваченное изображение на дисплее и может устанавливать режим захвата изображения, в котором осуществляется захват изображения, и режим воспроизведения, в котором изображение, захваченное в режиме захвата изображения, отображается на дисплее, и
когда режим воспроизведения установлен, и средство обнаружения операции обнаруживает встряхивание, примененное пользователем, средство управления отображением меняет назначенное к отображению изображение на дисплее.
10. Способ управления для устройства захвата изображения, имеющего операционный блок для обеспечения пользователю возможности ввода команды в данное устройство, при этом операционный блок обеспечивается на по меньшей мере двух поверхностях устройства, причем данный способ управления содержит:
этап обнаружения встряхивания для обнаружения ускорения встряхивания, примененного к устройству;
этап обнаружения операции для обнаружения встряхивания, примененного пользователем для выполнения предварительно определенного процесса от выхода от этапа обнаружения встряхивания; и
этап управления для подтверждения недействительности операции по меньшей мере части операционного блока, когда является обнаруженным встряхивание, примененное пользователем, при этом подтверждают недействительность операционного блока, обеспеченного на одной поверхности устройства, отдельно от операционного блока, обеспеченного на другой поверхности устройства.
11. Способ управления по п.10, дополнительно содержащий:
этап определения направления для определения направления встряхивания, примененного пользователем и обнаруженного посредством этапа обнаружения операции; и
этап определения ориентации для определения ориентации устройства,
причем на этапе управления подтверждается недействительность по меньшей мере части операционного блока на основе данной обнаруженной ориентации и данного обнаруженного направления встряхивания.
12. Способ управления по одному из пп.10 и 11, в котором операционное средство содержит пусковую кнопку для побуждения устройства начать захват изображения, и на этапе управления не подтверждают недействительность операции данной пусковой кнопки, когда пусковая кнопка задействуется, даже когда на этапе обнаружения операции обнаружено встряхивание, примененное пользователем.
13. Способ управления по одному из пп.10 и 11, который
дополнительно содержит этап управления отображением для отображения захваченного изображения на дисплее и может устанавливать режим захвата изображения, в котором осуществляется захват изображения, и режим воспроизведения, в котором изображение, захваченное в режиме захвата изображения, отображается на дисплее, и
когда режим воспроизведения установлен, и в случае, когда обнаружено встряхивание, примененное пользователем, на этапе управления дисплеем, назначенное к отображению изображение на дисплее меняется.
14. Способ управления для устройства захвата изображения, имеющего операционный блок для обеспечения пользователю возможности ввода команды в данное устройство, причем данный способ управления содержит:
этап обнаружения встряхивания для обнаружения ускорения встряхивания, примененного к устройству;
этап обнаружения операции для обнаружения встряхивания, примененного пользователем для выполнения предварительно определенного процесса от выхода от этапа обнаружения встряхивания; и
этап управления для подтверждения недействительности операции по меньшей мере части операционного блока, в то время как осуществляется обнаружение встряхивания, примененного пользователем,
при этом период, в который посредством этапа обнаружения операции осуществляется обнаружение встряхивания, примененного пользователем, составляет промежуток от того, когда абсолютное значение выхода блока обнаружения встряхивания становится не меньшим, чем первый порог, до тех пор, пока предварительно определенное время не истечет после того, как абсолютное значение выхода этапа обнаружения встряхивания станет меньшим, чем первый порог.
15. Способ управления по п.14, дополнительно содержащий: этап определения направления для определения направления встряхивания, примененного пользователем и обнаруженного посредством этапа обнаружения операции; и
этап определения ориентации для определения ориентации устройства,
причем на этапе управления подтверждают недействительность по меньшей мере части операционного блока на основе данной обнаруженной ориентации и данного обнаруженного направления встряхивания.
16. Способ управления по п.15, в котором операционный блок обеспечивается на по меньшей мере двух поверхностях устройства, и на этапе управления подтверждают недействительность операционного блока, обеспеченного на одной поверхности устройства, отдельно от операционного блока, обеспеченного на другой поверхности устройства.
17. Способ управления по любому из пп.14-16, в котором операционный блок содержит пусковую кнопку для побуждения устройства начать захват изображения, а на этапе управления не подтверждают недействительность операции данной пусковой кнопки, когда пусковая кнопка задействуется даже когда посредством этапа обнаружения операции обнаружено встряхивание, примененное пользователем.
18. Способ управления по любому из пп.14-16, который
дополнительно содержит этап управления отображением для отображения захваченного изображения на дисплее и может устанавливать режим захвата изображения, в котором осуществляется захват изображения, и режим воспроизведения, в котором изображение, захваченное в режиме захвата изображения, отображается на дисплее, и
когда режим воспроизведения установлен, и в случае, когда обнаружено встряхивание, примененное пользователем, на этапе управления дисплеем, назначенное к отображению изображение на дисплее меняется.
| US 6937272 B1, 30.08.2005 | |||
| US 5602566 A, 11.02.1997 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСМОТРА ИНФОРМАЦИИ НА ДИСПЛЕЕ | 2002 |
|
RU2288512C2 |
| СПОСОБ РАБОТЫ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА ПОРТАТИВНОГО УСТРОЙСТВА ОБРАБОТКИ ДАННЫХ | 2000 |
|
RU2242043C2 |

