Перекрестная ссылка на родственные заявки
[0001] Настоящая заявка на патент представляет собой продолжающую заявку PCT/CN2022/121200, поданную 26 сентября 2022 г., в которой испрашивается приоритет согласно патенту Китая на изобретение № CN202210859807.5, поданному 22 июля 2022 г., полное содержание которой включено в настоящую заявку посредством ссылки.
Область техники
[0002] Изобретение относится к области техники, касающейся управления интервенционным хирургическим роботом, в частности, к интервенционной хирургической роботизированной системе, способу управления и носителю данных.
Уровень техники
[0003] Малоинвазивная интервенционная терапия сердечно-сосудистых и цереброваскулярных заболеваний представляет собой основное лечение сердечно-сосудистых и цереброваскулярных заболеваний, а также обладает очевидными преимуществами, связанными с небольшим разрезом, коротким периодом постоперационного восстановления и т.п., по сравнению с традиционной хирургической операцией. Интервенционная операция на сердечно-сосудистой и цереброваскулярной системе представляет собой процесс, в ходе которого врач вручную вводит катетер, проволочный проводник, стент и другие инструменты в тело пациента для выполнения лечения. Интервенционная операция обладает множеством недостатков, например, в ходе операции, при цифровой субтракционной ангиографии происходит излучение рентгеновских лучей, быстро уменьшается физическая сила врача, а также внимание и устойчивость, снижается точность операции, легко могут произойти несчастные случаи, такие как повреждение внутренней оболочки кровеносного сосуда, перфорация и разрыв сосудов и т.п., вызванные несоответствующим толкающим усилием, вследствие чего возникает риск для жизни пациента. Во-вторых, кумулятивный ущерб длительного ионизирующего излучения может существенно увеличить шансы врачей на развитие лейкемии, рака и острой катаракты. Феномен, заключающийся в том, что врачи непрерывно аккумулируют излучение вследствие интервенционной операции, стал проблемой, которую нельзя игнорировать, которая наносит ущерб общему рабочему стажу врачей и ограничивает развитие интервенционной операции.
[0004] Недостатки могут быть эффективным образом устранены посредством роботизированных технологий, точность и стабильность операции могут быть значительно улучшены, вместе с тем, может быть существенно снижен вред, наносимый здоровью врача интервенционной терапии, вызванный радиоактивным излучением, а также уменьшена частота возникновения несчастных случаев в ходе операции. Теме не менее, управление существующими интервенционными роботами осуществляется вручную, робот для сосудистой интервенционной хирургии требует длительного времени для выполнения хирургической операции, и врачу необходимо концентрироваться в течение длительного времени для выполнения хирургической операции, что приводит к утомлению и ошибкам в ходе операции. Таким образом, все больше и больше внимания уделяется автоматизированной операции вспомогательного робота для интервенционных операций на сердечно-сосудистой и цереброваскулярной системе, и автоматизированная операция постепенно становится ключевым объектом исследований и разработок в области медицинских роботов во всех научно-технически развитых странах.
[0005] Тем не менее, не существует проверенного и доступного способа управления автоматизированной интервенционной операцией для автоматизированной операционной системы робота, применяемого в сосудистой интервенционной хирургии, автоматизированная операция не может быть выполнена, и, как правило, применяется ручное управление, таким образом, интервенционная операция выполняется в течение длительного времени, точность является невысокой, а эффективность - низкой, следовательно, существуют возможности для усовершенствований.
Краткое описание
[0006] Изобретение направлено на решение указанных выше технических проблем известного уровня техники. В изобретении представлены интервенционная хирургическая роботизированная система, способ управления и носитель данных, которые позволяют реализовать функцию автоматической навигации и взаимодействия между интервенционной хирургической роботизированной системой и врачом. Врач может управлять интервенционным хирургическим роботом для выполнения автоматизированной операции, а также может своевременно контролировать и решать проблемы, возникающие в процессе автоматизированной операции, чтобы повысить точность и безопасность автоматизированной операции интервенционного хирургического робота.
[0007] Согласно первому аспекту изобретения, представлена интервенционная хирургическая роботизированная система для управления медицинским интервенционным устройством с целью перемещения в пределах полости физиологической трубчатой структуры пациента. Интервенционная хирургическая роботизированная система включает управляющий механизм и исполнительный механизм. Управляющий механизм включает, по меньшей мере, один процессор, средство отображения и панель управления пользователя. По меньшей мере, один процессор выполнен с возможностью получения интраоперационного изображения, содержащего физиологическую трубчатую структуру, и генерирования команды автоматической навигации путем анализа и обработки интраоперационного изображения. Средство отображения используется для отображения интраоперационного изображения и текущего состояния перемещения медицинского интервенционного устройства. Панель управления пользователя выполнена с возможностью приема ручного управления пользователя и передачи команды ручного управления, соответствующей ручному управлению. В исполнительном механизме выполнены роботизированный манипулятор и концевой привод, и исполнительный механизм выполнен с возможностью приема команд, по меньшей мере, от одного процессора и панели управления пользователя, управления медицинским интервенционным устройством для продвижения на основе команд автоматической навигации в случае, когда команды автоматической навигации приняты без получения команд ручного управления, и управления медицинским интервенционным устройством на основе команд ручного управления в случае, когда приняты команды ручного управления.
[0008] Согласно второму аспекту изобретения, представлен способ управления интервенционным хирургическим роботом для управления медицинским интервенционным устройством с целью перемещения в пределах полости физиологической трубчатой структуры пациента. Интраоперационное изображение, содержащее физиологическую трубчатую структуру, получают посредством, по меньшей мере, одного процессора управляющего механизма, и команда автоматической навигации генерируется путем выполнения анализа и обработки интраоперационного изображения. Интраоперационное изображение и текущее состояние перемещения медицинского интервенционного устройства представляются с помощью средства отображения. Ручное управление пользователя принимается посредством панели управления пользователя, и передается команда ручного управления, соответствующая ручному управлению. Команды, по меньшей мере, от одного процессора и панели управления пользователя принимаются посредством исполнительного механизма. В исполнительном механизме выполнены роботизированный манипулятор и концевой привод. Исполнительный механизм, после приема команды автоматической навигации без получения команды ручного управления, управляет медицинским интервенционным устройством для продвижения на основе команды автоматической навигации, и после приема команды ручного управления, управляет медицинским интервенционным устройством на основе команды ручного управления.
[0009] Согласно третьему аспекту изобретения, представлен машиночитаемый носитель данных, в котором хранятся инструкции компьютерной программы, которые, при выполнении процессором, обеспечивают выполнение процессором способа управления интервенционным хирургическим роботом согласно различным вариантам осуществления изобретения.
[0010] В сравнении с известным уровнем техники, преимущества вариантов осуществления заключаются в следующем:
[0011] Интервенционная хирургическая роботизированная система, представленная в варианте осуществления изобретения, может автоматически выполнять основные операционные этапы при проведении интервенционной операции на кровеносных сосудах. Управляющий механизм интервенционной хирургической роботизированной системы включает процессор, процессор получает интраоперационное изображение, содержащее физиологическую трубчатую структуру, и команда автоматической навигации может быть сгенерирована путем идентификации изображения и анализа интраоперационного изображения. В ходе хирургической процедуры в режиме реального времени, вместе с выполнением автоматизированной хирургической операции интервенционным хирургическим роботом, состояние выполнения программы концевым приводом интервенционного хирургического робота также изменяется. Интервенционная хирургическая роботизированная система, представленная в варианте осуществления изобретения, может генерировать команду автоматической навигации, и команда автоматической навигации позволяет направлять и управлять исполнительным механизмом робота для выполнения управляющего воздействия на концевой привод в режиме реального времени, чтобы обеспечить достижение концевым приводом заданного положения. В ходе автоматизированной хирургической операции, интервенционная хирургическая роботизированная система предоставляет врачу данные параметров в режиме реального времени во время операции. Врач может регулировать интервенционную хирургическую роботизированную систему путем проверки релевантных параметров, возвращаемых системой, посредством человеко-машинного взаимодействия с интервенционной хирургической роботизированной системой, чтобы повысить точность генерируемой команды автоматической навигации, и может управлять исполнительным механизмом для приостановки в любой момент времени в ходе автоматизированной операции, а также проверять и корректировать условие выполнения исполнительного механизма. Следовательно, может быть эффективным образом реализовано человеко-машинное взаимодействие врача и интервенционной хирургической роботизированной системы, интервенционная хирургическая роботизированная система позволяет реализовать не только автоматизированную операцию, но также и множество мер безопасности для процесса выполнения автоматизированной операции посредством человеко-машинного взаимодействия врача и системы, позволяет эффективно обеспечить безопасность в процессе выполнения автоматизированной операции.
[0012] Приведенное выше описание представляет собой лишь краткое изложение технических решений изобретения, для более ясного понимания технических решений изобретения, изобретение может быть реализовано в соответствии с содержанием описания, и для того, чтобы сделать представленные выше и другие объекты, признаки и преимущества изобретения более понятными, далее приведено подробное описание изобретения.
Краткое описание чертежей
[0013] На чертежах, выполненных необязательно в соответствии с масштабом, одинаковые ссылочные позиции могут обозначать аналогичные компоненты на различных видах. Идентичные ссылочные позиции, включающие буквенные индексы, или различные буквенные индексы могут представлять различные примеры аналогичных компонентов. Чертежи, главным образом, иллюстрируют, в качестве примера, а не в качестве ограничения, различные варианты осуществления и, вместе с описанием и формулой изобретения, служат для пояснения раскрытых вариантов осуществления. Такие варианты осуществления являются иллюстративными, приведены в качестве примера и не предназначены для использования в качестве исчерпывающих или исключительных вариантов осуществления настоящего способа, устройства, системы или машиночитаемого носителя, предназначенного для долговременного хранения информации, содержащего команды для выполнения способа.
[0014] ФИГ. 1 (а) представляет собой принципиальную схему, отображающую структуру интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0015] ФИГ. 1 (b) представляет собой принципиальную схему общей конструкции интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0016] ФИГ. 1 (с) представляет собой блок-схему общего способа выполнения автоматизированной хирургической операции посредством интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0017] ФИГ. 2 представляет собой блок-схему способа генерирования команд автоматической навигации для интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0018] ФИГ. 3 представляет собой принципиальную схему генерирования команд автоматической навигации посредством интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0019] ФИГ. 4 представляет собой блок-схему способа генерирования команды автоматической навигации для снижения скорости продвижения для интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0020] ФИГ. 5 представляет собой блок-схему способа управления автоматизированной хирургической процедурой на основе отклонения посредством интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения.
[0021] ФИГ. 6 представляет собой блок-схему способа человеко-машинного взаимодействия в ходе автоматизированной хирургической операции, выполняемой с применением интервенционной хирургической роботизированной системы, согласно варианту осуществления изобретения.
[0022] ФИГ. 7 представляет собой блок-схему способа управления интервенционным хирургическим роботом согласно варианту осуществления изобретения.
Подробное описание вариантов осуществления
[0023] Для более полного понимания технических решений изобретения, изобретение подробно описано ниже со ссылкой на прилагаемые чертежи и подробное описание. Варианты осуществления изобретения более подробно описаны ниже со ссылкой на чертежи и конкретные варианты осуществления, однако изобретение не ограничено ими.
[0024] Используемые в настоящем изобретении термины "первый", "второй" и т.п. не обозначают какой-либо порядок, количество или значимость, а предпочтительно используются для отличия одного элемента от другого. Использование слова "включающий" или "включает" и т.п. в настоящем изобретении означает, что к элементам, перечисленным до данного слова, относятся элементы, перечисленные после данного слова, и не исключает возможность того, что также могут быть отнесены другие элементы. В изобретении, стрелки, изображенные на чертежах соответствующих этапов, используются только в качестве примеров алгоритмов выполнения, а не ограничений, и техническое решение изобретения не ограничивается алгоритмами выполнения, описанными в вариантах осуществления, и соответствующие этапы в алгоритмах выполнения могут выполняться совместно, могут выполняться раздельно, могут выполняться в измененном порядке до тех пор, пока не будет изменена логическая взаимосвязь исполняемого содержания.
[0025] Все термины (включая технические и научные термины), используемые в настоящем документе, имеют то же значение, что и значение, общепринятое специалистами в области техники, к которой относится настоящее изобретение, если иное специально не определено. Кроме того, следует понимать, что термины, чьи определения представлены в широко используемых словарях, должны быть интерпретированы как имеющие значение, согласуемое с их значением в контексте соответствующей области техники, и не должны быть интерпретированы в абсолютизированном или чрезмерно формальном смысле, если иное специально не определено в настоящем документе. Технические решения, способы и устройства, известные специалистам в соответствующей области техники, могут быть не описаны подробно, но в соответствующих случаях их следует рассматривать как часть описания.
[0026] Интервенционная хирургическая роботизированная система представлена согласно вариантам осуществления изобретения и может включать, например, управляющий механизм, исполнительный механизм. Управляющий механизм и исполнительный механизм, соответственно, выполняют соответствующие этапы в способе управления интервенционным хирургическим роботом согласно различным вариантам осуществления изобретения.
[0027] На ФИГ. 1 (а) представлена принципиальная структурная схема интервенционной хирургической роботизированной системы согласно варианту осуществления изобретения. Интервенционную хирургическую роботизированную систему 10 применяют для управления медицинским интервенционным устройством для перемещения в пределах полости физиологической трубчатой структуры пациента. Интервенционная хирургическая роботизированная система 10 включает управляющий механизм 101 и исполнительный механизм 102. Управляющий механизм 101 включает, по меньшей мере, один процессор 1011, средство отображения 1012 и панель управления пользователя 1013.
[0028] В данном варианте осуществления, по меньшей мере, один процессор 1011 выполнен с возможностью получения интраоперационного изображения, содержащего физиологическую трубчатую структуру, и генерирования команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения. Изображение может представлять собой изображение кровеносного сосуда, полученное из базы данных изображений, или изображение, полученное на основе других методов, которые, в частности, не ограничены. Методы получения изображения включают, помимо прочего, прямое получение с помощью различных методов визуализации, например, среди прочего, методов интраоперационной медицинской визуализации, таких как цифровая субтракционная ангиография, эндоскопия и другие, или получение на основе последующей обработки или реконструкции исходного изображения, полученного посредством устройства визуализации. В настоящем документе технический термин "получение" относится к любому способу прямого или косвенного получения с дополнительной обработкой изображения, например, посредством шумоподавления, кадрирования, реконструкции и т.д., или без нее.
[0029] Термин "интраоперационный" означает происходящий в ходе хирургической операции, а не до операции и после операции. К примеру, в последующем описании в качестве примера представлено продвижение проволочного проводника через кровеносный сосуд. В ходе операции, положение подвода, расстояние продвижения, изменяемый угол головки проволочного проводника, изгиб кровеносного сосуда, степень стеноза и другие релевантные параметры перемещения проволочного проводника изменяются в ходе автоматизированной операции, изменение значительно повышает сложность автоматизированной операции, и при применении интервенционного хирургического робота для автоматизированной операции возникают трудности при получении безопасной и корректной траектории продвижения и режима работы, а также более значительные трудности по сравнению с прогнозированием траектории продвижения и режима работы до и после операции (релевантные параметры являются относительно постоянными в предоперационном и постоперационном состояниях). Процессор 1011 генерирует команду автоматической навигации для направления медицинского интервенционного устройства с целью перемещения в полости физиологической трубчатой структуры посредством анализа и обработки изображения в ходе операции, и выполняет автоматизированную операцию на основе команды автоматической навигации, таким образом, повышается эффективность автоматизированной операции.
[0030] В частности, процессор 1011 может представлять собой устройство обработки, такое как микропроцессор, центральный процессор (CPU), графический процессор (GPU) и т.д., которое может включать одно или несколько универсальных устройств обработки. В частности, процессор 1011 может представлять собой микропроцессор с полным набором команд (CISC), микропроцессор с сокращенным набором команд (RISC), микропроцессор, использующий очень длинные слова команд (VLIW), процессор, выполняющий другие наборы команд, или процессоры, выполняющие комбинацию наборов команд. Процессор 1011 также может представлять собой одно или несколько устройств обработки специального назначения, таких как заказная специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA), цифровой сигнальный процессор (DSP), система на кристалле (SoC) или т.п. Как понятно специалистам в данной области техники, в некоторых вариантах осуществления, процессор 1011 может представлять собой специализированный процессор, а не универсальный процессор. Процессор 1011 может включать одно или несколько известных устройств обработки, например, микропроцессор из серий Pentium™, Core™, Xeon™ или Itanium™, произведенных компанией Intel™, серий Turion™, Athlon™, Sempron™, Opteron™, FX™, Phenom™, произведенных компанией AMD™, или различные процессоры, произведенные компанией Sun Microsystems. Процессор 1011 также может включать графические процессоры, например, графические процессоры из серий GeForce®, Quadro®, Tesla®, произведенных компанией Nvidia™, серий GMA, Iris™, произведенных компанией Intel™, или серии Radeon™, произведенной компанией AMD™. Процессор 1011 также может включать ускоренный процессор, как например, серия Desktop A-4 (6,6), произведенная компанией AMD™, серия Xeon Phi™, произведенная компанией Intel™. Описанные варианты осуществления не ограничиваются каким-либо типом процессора или схемой процессора, которые выполнены иным образом с возможностью осуществления способа управления интервенционным хирургическим роботом в соответствии с различными вариантами осуществления изобретения. Кроме того, термин "процессор" или "процессор обработки изображений" может включать более одного процессора, например, многоядерную архитектуру или множество процессоров, при этом каждый процессор имеет многоядерную архитектуру. Процессор 1011 выполнен с возможностью осуществления последовательностей команд компьютерной программы, хранящихся в памяти, для выполнения различных операций, процессов и способов, описанных в настоящем документе. Процессор 1011 может быть соединен с возможностью связи с памятью и выполнен с возможностью осуществления исполняемых компьютером команд, хранящихся в ней.
[0031] Средство отображения 1012 используется для отображения интраоперационного изображения и текущего состояния перемещения медицинского интервенционного устройства, чтобы врач или другие пользователи могли своевременно узнать текущее состояние перемещения медицинского интервенционного устройства. К примеру, является ли результат отображения ожидаемым или нет, можно судить согласно интраоперационному изображению, представленному средством отображения 1012, или можно своевременно оценить, находится ли состояние перемещения, например, положение медицинского устройства доступа в кровеносном сосуде, в безопасном и корректном диапазоне или нет, таким образом, когда возникнет опасность, ручное вмешательство может быть выполнено заранее в автоматизированном хирургическом процессе интервенционного хирургического робота. Средство отображения 1012 может представлять собой, например, дисплей 1015, показанный на ФИГ. 1 (b), или может представлять собой элемент, в котором дисплей 1015 соединен с другим устройством, что, в частности, не ограничивается.
[0032] Панель управления пользователя 1013 выполнена с возможностью приема ручного управления, осуществляемого пользователем, и передачи команды ручного управления, соответствующей ручному управлению, таким образом, пользователь может эффективно управлять процессом осуществления автоматизированной операции, выполняемой посредством интервенционного хирургического робота. Как показано на ФИГ. 1 (b), панель управления пользователя 1013 включает, помимо прочего, контроллер управления 1017, и врач использует контроллер управления 1017 для выполнения операции ручного управления роботом. Принимая в качестве примера использование робота для продвижения и поворота проволочного проводника и направляющей трубки в кровеносном сосуде, при неверных действиях робота или других чрезвычайных ситуациях, врач может управлять роботом для выполнения операции катетера и проволочного проводника путем управления маятниковыми и роликовыми средствами управления на контроллере управления 1017, таким образом, обеспечивая плавное осуществление операции. Контроллер управления 1017 может включать два способа передачи команд ручного управления в исполнительный механизм 102. Например, печатная плата может быть встроена в контроллер управления 1017, и команды ручного управления отправляются напрямую в исполнительный механизм 102 посредством контроллера управления 1017. В другом варианте осуществления, контроллер управления 1017 передает команду ручного управления в процессор 1011, которая впоследствии может быть перенаправлена в исполнительный механизм 102 посредством релейного устройства в управляющем механизме 101, такого как, помимо прочего, шкаф управления 1014 на ФИГ. 1 (b).
[0033] Кроме того, в исполнительном механизме 102 выполнены роботизированный манипулятор 1021 и концевой привод 1022. Например, концевой привод 1022 представляет собой привод проволочного проводника и/или привод катетера, и взаимодействует с устройством для цифровой субтракционной ангиографии 104 (как показано на ФИГ. 1 (b)) для выполнения операционного действия интервенционной процедуры. Привод проволочного проводника применяется для удерживания проволочного проводника, для проталкивания и поворота проволочного проводника под действием роботизированного манипулятора 1021, и привод катетера используется для удерживания катетера, для проталкивания и поворота катетера под действием роботизированного манипулятора 1021. Как показано на ФИГ. 1 (b), исполнительный механизм 102 установлен на ложе для катетера 103; устройство для цифровой субтракционной ангиографии 104, ложе для катетера 103 и интервенционный хирургический робот размещены в комнате для катетеризации, управляющий механизм 101 размещен в комнате управления, управляющий механизм 101 включает, помимо прочего, шкаф управления 1014, дисплей 1015, сенсорную панель 1016 и контроллер управления 1017. Контроллер управления 1017, сенсорная панель 1016 и дисплей 1015, все соединены со шкафом управления 1014. Врач может наблюдать из комнаты управления за условиями в комнате для катетеризации через окно из свинцового стекла комнаты для катетеризации. Шкаф управления 1014 включает, по меньшей мере, один процессор 1011, выполненный с возможностью получения и анализа данных изображения, полученных от устройства для цифровой субтракционной ангиографии 104, генерирования и отправки команд автоматической навигации в исполнительный механизм 102, и исполнительный механизм 102 также выполнен с возможностью возврата соответствующих данных, например, данных о выполненном действии, в шкаф управления 1014. Шкаф управления 1014 включает, помимо прочего, процессор 1011 для анализа и обработки данных, источник бесперебойного питания для подачи электроэнергии, разделительный трансформатор для стабилизации напряжения и лампу импульсного источника питания. Дисплей 1015 представляет данные, включающие, помимо прочего, команды автоматической навигации, данные изображения состояния перемещения медицинского интервенционного устройства, а также ожидаемые действия робота, планируемую траекторию перемещения и т.п. Сенсорная панель 1016 применяется для обеспечения человеко-машинного взаимодействия, например, настройки параметров, подтверждения команды и т.д., а также представляет в режиме реального времени данные сопротивления катетера и проволочного проводника, обнаруженных роботом.
[0034] Исполнительный механизм 102 выполнен с возможностью приема команд, по меньшей мере, от одного процессора 1011 и панели управления пользователя 1013. При приеме команды автоматической навигации без получения команды ручного управления, исполнительный механизм управляет медицинским интервенционным устройством для продвижения на основе команды автоматической навигации, а при получении команды ручного управления, исполнительный механизм управляет медицинским интервенционным устройством на основе команды ручного управления, таким образом, реализуется человеко-машинное взаимодействие между врачом и интервенционным хирургическим роботом, согласующееся с рабочей нагрузкой и характеристиками безопасности. Исполнительный механизм может быть направлен автоматически, без команды ручного управления. Врачу необходимо только осуществлять контроль в режиме реального времени, и когда врач обнаруживает какую-либо проблему, он может отправить команду ручного управления в любой момент времени для отмены команды автоматической навигации и быстрого вмешательства, что повышает безопасность и точность автоматизированной операции.
[0035] В частности, как показано на ФИГ. 1 (с), на этапе S101, устройство для цифровой субтракционной ангиографии 104 получает данные изображения в режиме реального времени, и процессор 1011, находящийся в шкафу управления 1014, в управляющем механизме 101, может генерировать команды автоматической навигации путем анализа изображений в ходе операции, полученных посредством устройства для цифровой субтракционной ангиографии 104 в режиме реального времени (этап S102), и представлять релевантные данные на дисплее 1015 (этап S104), включая, помимо прочего, команды автоматической навигации, изображения в ходе операции, текущее состояние перемещения медицинских интервенционных устройств (например, проволочных проводников, катетеров), команды следующих действий, планируемые траектории перемещения и т.д., без конкретных ограничений. На основе релевантных данных, представленных на дисплее 1015, врач может осуществлять ручное вмешательство и вносить соответствующие корректировки. Например, в автоматизированном операционном процессе, интервенционный хирургический робот возвращает в режиме реального времени изображение в ходе операции и текущее состояние перемещения медицинского интервенционного устройства на дисплей 1015, чтобы врач получал информацию о состоянии и перемещении робота в режиме реального времени, а также мог выполнять ручное вмешательство в любой момент времени, в случае ненадлежащего обращения. К примеру, врач может изменять релевантные параметры в командах автоматической навигации или другие релевантные параметры на сенсорной панели 1016 для повышения точности и безопасности команд автоматической навигации. В качестве другого примера, на этапе S103, врач может вручную определить, осуществлять ли выполнение автоматизированной операции, на основе релевантных данных. При выполнении автоматизированной хирургической операции, робот выполняет автоматизированную хирургическую операцию на основе команды автоматической навигации, и управляющий механизм 101 управляется автоматически (этап S105) для осуществления автоматизированной хирургической операции. Когда врач полагает, что продолжение выполнения автоматизированной операции сопряжено с высоким риском, необходимо ручное вмешательство, врач переходит к этапу ручного вмешательства путем нажатия кнопки на сенсорной панели 1016, и роботизированная система временно прекращает автоматизированную операцию и ожидает внесения врачом корректировок. Например, врач может вручную управлять роботом путем управления двумя устройствами, т.е. сенсорной панелью 1016 и контроллером управления 1017, а также может отправить команды в исполнительный механизм 102 робота, и на основе команд ручного управления, исполнительный механизм 102 выполняет команды управления (этап S106). После завершения корректировок врачом, режим автоматизированной операции может быть возобновлен, и система будет циклически выполнять этапы до тех пор, пока задача не будет завершена. Данная стратегия позволяет реализовать в режиме реального времени точную и безопасную автоматизированную операцию пациента в условиях неавтоматизированного контроля, что значительно улучшает опыт эксплуатации системы врачами, облегчает тяжелые условия труда врачей, а также обладает более высокой применимостью и исследовательской ценностью в области медицинских роботов. При условии, что исполнительный механизм 102 не получает команду ручного управления, робот для сосудистых интервенционных операций управляет исполнительным механизмом 102 для перемещения согласно команде автоматической навигации, чтобы переместить катетер и/или проволочный проводник, затем данные перемещения возвращаются в шкаф управления 1014, изображение устройства для цифровой субтракционной ангиографии 104 изменяется после перемещения проволочного проводника и/или катетера. Команда автоматической навигации своевременно обновляется на основе обновленного интраоперационного изображения, что способствует выполнению автоматизированной операции.
[0036] Таким образом, благодаря эффективному человеко-машинному взаимодействию между врачом и интервенционной хирургической роботизированной системой 10, повышается эффективность выполнения автоматизированной хирургической операции, осуществляемой интервенционным хирургическим роботом, а также значительно повышается точность и безопасность хирургической операции.
[0037] На ФИГ. 2 представлена блок-схема способа генерирования команд автоматической навигации для интервенционной хирургической роботизированной системы 10 согласно варианту осуществления изобретения. На этапе S201, получают репрезентативное изображение, содержащее физиологическую трубчатую структуру, и источники данных изображения включают, по меньшей мере, данные медицинского изображения, полученные от устройства для цифровой субтракционной ангиографии 104, и большое количество данных клинических операций врача. Полученные данные медицинского изображения относятся к изображению, полученному посредством устройства для цифровой субтракционной ангиографии 104, и конкретные части полученных данных не ограничены, включая, помимо прочего, нервы, грудную полость и т.п. Данные операций врача относятся к данным операций, выполненных врачом посредством экрана интервенционной роботизированной хирургической системы (здесь и далее именуемой как роботизированная система), или данным традиционных клинических операций. На этапе S202, репрезентативное изображение анализируется для получения планируемой траектории перемещения, например, обучаемая сеть может применяться для выделения центральной линии кровеносного сосуда из репрезентативного изображения, и выделенная центральная линия кровеносного сосуда используется в качестве планируемой траектории перемещения, и конкретный способ генерирования планируемой траектории перемещения подробно описан ниже. Планируемая траектория перемещения, описанная в настоящем документе, может рассматриваться как траектория, вдоль которой перемещается медицинское интервенционное устройство в направлении действительного продвижения кровеносного сосуда. Планируемая траектория перемещения может быть получена посредством системного расчета, также может быть задана врачом вручную, или может быть получена посредством ручной корректировки на основе результата расчета системы. На этапе S203, интраоперационное изображение анализируется для определения текущего состояния перемещения медицинского интервенционного устройства, которое может рассматриваться как текущее направление перемещения медицинского интервенционного устройства, например, перемещение вперед, поворот или другое направление перемещения медицинского интервенционного устройства. Текущее состояние перемещения также может включать направление перемещения, угол и т.д. медицинского интервенционного устройства в текущий момент времени. Текущее состояние перемещения не имеет конкретного ограничения, в частности, зависит от требований фактического процесса управления. На этапе S204, команда автоматической навигации генерируется на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства для повышения безопасности интервенционного хирургического робота при выполнении автоматизированной хирургической операции.
[0038] В некоторых вариантах осуществления, этап генерирования команды автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства, в частности, включает получение текущего первого положения и первого направления перемещения репрезентативной части медицинского интервенционного устройства, определение второго положения репрезентативной части в первом направлении перемещения, определение кратчайшей линии соединения между вторым положением репрезентативной части и планируемой траекторией перемещения, определение точки пересечения кратчайшей линии соединения и планируемой траектории перемещения, получение внутреннего угла между линией соединения точки пересечения и первого положения и первым направлением перемещения, и когда внутренний угол меньше первого порогового угла, генерирование команды автоматической навигации для продвижения, чтобы медицинское интервенционное устройство перемещалось вперед после получения команды автоматической навигации для продвижения. Репрезентативная часть включает, помимо прочего, само медицинское интервенционное устройство, головку медицинского интервенционного устройства или другие части, указанные пользователем и способные регулировать изменение перемещения медицинского интервенционного устройства. Репрезентативная часть, в частности, не ограничивается, однако зависит от фактической ситуации врача в фактическом операционном процессе.
[0039] При этом, первое положение может рассматриваться, как положение медицинского интервенционного устройства перед выполнением следующего действия. Например, если медицинское интервенционное устройство перемещается вперед из положения а в положение b, и затем перемещается вперед из положения b в положение с, положение а представляет собой первое положение относительно положения b, и положение b представляет собой первое положение относительно положения с. Первое направление перемещения аналогично первому положению, которое может рассматриваться, как направление перемещения медицинского интервенционного устройства перед выполнением следующего действия, и определение направления перемещения может быть задано врачом вручную на основе фактического направления перемещения, в котором врач продвигает медицинское интервенционное устройство. В другом варианте осуществления, направление может представлять собой тангенциальное направление в соответствующем положении, или может представлять собой направление, заданное компьютером, что, в частности, не ограничивается.
[0040] В частности, в качестве примеров принимают продвижение и поворот проволочного проводника в кровеносном сосуде. Как показано на ФИГ. 3, позиция 301 представляет собой планируемую траекторию перемещения, позиция 302 представляет собой кровеносный сосуд, позиция 303 представляет собой конечную точку, и позиция 304 представляет собой проволочный проводник. Репрезентативная часть проволочного проводника 304 представляет собой головку проволочного проводника, и когда головка проволочного проводника находится в исходном положении, головка проволочного проводника расположена в первом положении А на планируемой траектории перемещения 301, и первое направление перемещения в первом положении А представляет собой направление продвижения AC. Затем, определяется второе положение С в первом направлении перемещения, и второе положение С соединяется с планируемой траекторией перемещения 301 для получения кратчайшей линии соединения ВС, при этом точка В представляет собой точку пересечения кратчайшей линии соединения ВС и планируемой траектории перемещения 301. Способ определения второго положения С, в частности, не ограничивается, и к примеру, способ определения может представлять собой произвольный выбор одного положения посредством процессора 1011 в первом направлении перемещения, при условии, что внутренний угол ∠BAC, полученный на основе второго положения, не превышает первый пороговый угол. В качестве другого примера, путем ручной настройки или настройки посредством системы скорости продвижения проволочного проводника по умолчанию, принимая скорость продвижения проволочного проводника 304, равной 2 мм/с, процессор 1011 в шкафу управления 1014 может определить второе положение в первом направлении перемещения согласно расстоянию продвижения в интервале 0.5 с. Например, процессор 1011 заранее осуществляет вычисления для определения второго положения подвода через 0.5 с, и рассчитывает, меньше ли внутренний угол ∠BAC первого порогового угла, и если меньше, то генерирует команду автоматической навигации для перемещения вперед. В данной точке, проволочный проводник 304 может продолжить продвижение после получения команды навигации для продвижения и обновить второе положение до первого положения, продолжая описанный выше процесс. В ходе процесса продвижения проволочного проводника 304, скорость продвижения проволочного проводника 304 может регулироваться при необходимости в любой момент времени. Первый пороговый угол может представлять собой угол, заданный пользователем вручную, или может представлять собой угол, полученный другими способами, что не ограничивается. Приведенное выше является только одним вариантом осуществления и не исключает другие способы определения второго положения.
[0041] В некоторых вариантах осуществления, расстояние между вторым положением и первым положением определяется, как расстояние продвижения, когда внутренний угол не превышает первый пороговый угол. Как показано на ФИГ. 3, принимая, что ∠BAC равен первому пороговому углу, расстояние между первым положением А и вторым положением С представляет собой расстояние продвижения. В соответствии с командами автоматической навигации на основе данного расстояния продвижения, пользователь может знать, что продвижение проволочного проводника 304 из первого положения А во второе положение С является безопасным, и приблизительно соответствует планируемой траектории перемещения 301. Если проволочный проводник 304 продолжает продвижение после второго положения С, может возникнуть опасность, и система может выдать предупреждение, предлагающее пользователю выполнить проверку. При получении исполнительным механизмом 102 команды автоматической навигации, касающейся расстояния продвижения, исполнительный механизм может непосредственно управлять проволочным проводником 304 для продвижения во второе положение С согласно расстоянию продвижения, или исполнительный механизм может непосредственно повернуть проволочный проводник 304 и затем продвинуть вперед, при этом конкретные варианты осуществления зависят от настройки системы и ручного управления пользователем. В других вариантах осуществления, когда ∠BAC меньше первого порогового угла, проволочный проводник 304 продвигается в соответствии с безопасной траекторией продвижения, совпадающей с планируемой траекторией перемещения 301, и процессор 1011 может автоматически генерировать команду автоматической навигации для продвижения согласно настройке, или может автоматически генерировать команду автоматической навигации, касающуюся расстояния продвижения, согласно настройке, чтобы указать расстояние, на которое проволочный проводник 304 продвигается вперед.
[0042] В некоторых вариантах осуществления, когда внутренний угол превышает первый пороговый угол, определяется угол, в соответствии с которым медицинским интервенционным устройством управляют для поворота, и команда автоматического поворота, указывающая поворот на определенный угол, генерируется в качестве команды автоматической навигации. Угол поворота не превышает первый пороговый угол и может представлять собой другие углы, меньше первого порогового угла, или может равняться первому пороговому углу, и репрезентативная часть медицинского интервенционного устройства попадает на планируемую траекторию перемещения или рядом с ней путем управления медицинским интервенционным устройством для поворота на определенный угол. Например, принимая, что ∠BAC на ФИГ. 3 больше первого порогового угла, продолжающееся продвижение проволочного проводника 304 может привести к возникновению опасности, ведущей к разрыву сосуда. В данной точке, может генерироваться команда автоматической навигации, которая предписывает проволочному проводнику 304 осуществить поворот. Угол поворота может представлять собой первый пороговый угол или может представлять собой другие соответствующие углы, меньше первого порогового угла. Например, после поворота проволочного проводника 304 на первый пороговый угол, головка проволочного проводника 304 попадает в точку В на планируемой траектории перемещения 301. В другом варианте осуществления, проволочный проводник 304 поворачивается на угол, меньше первого порогового угла, и головка проволочного проводника 304 попадает в положение рядом с точкой В. Приведенные выше примеры являются исключительно иллюстративными и, в частности, не ограничивают объем правовой охраны.
[0043] Кроме того, в ходе продвижения проволочного проводника могут быть задействованы различные способы. Например, когда внутренний угол меньше первого порогового угла, проволочный проводник может быть направлен для продвижения в первом направлении перемещения при обновлении первого положения. И затем, продолжается определение нового второго положения на основе обновленного первого положения, перерасчет внутреннего угла, и когда внутренний угол равен первому пороговому углу, пользователь может непосредственно продвинуть головку проволочного проводника во второе положение, указанное командой автоматической навигации, касающейся расстояния продвижения, или непосредственно повернуть проволочный проводник на первый пороговый угол, а затем продолжить продвижение. Команда автоматической навигации для перемещения вперед, команда автоматической навигации, касающаяся расстояния продвижения, и команда автоматической навигации для поворота не изолированы друг от друга, но выполняются отдельно и согласуются друг с другом. В ходе автоматизированного операционного процесса, первое положение постоянно обновляется на основе состояния перемещения медицинского интервенционного устройства, такого как проволочный проводник, и вычисления повторяются до тех пор, пока не получен ряд команд автоматической навигации. Управление продвижением, расстоянием продвижения и углом поворота медицинского интервенционного устройства выполняется отдельно, но взаимно согласованно, и медицинское интервенционное устройство может выполнять автоматизированную операцию в более точном и безопасном режиме посредством совместного управления.
[0044] В некоторых вариантах осуществления, планируемая траектория перемещения остается постоянной в ходе хирургической операции, так что команды автоматической навигации генерируются на основе планируемой траектории перемещения, таким образом, повышая безопасность роботизированной хирургии. Изображение физиологической трубчатой структуры включает изображение сосуда, по меньшей мере, одного сосуда из ряда, включающего сосуд с нервом, висцеральный сосуд и периферический сосуд, следовательно, планируемая траектория перемещения, полученная на основе изображения физиологической трубчатой структуры, остается постоянной в ходе операции, чтобы отличаться от изображений сосуда, которые изменяются в любой момент времени в течение операции. Например, кровеносный сосуд рядом с аортой сопровождаются движением сердца, и изображение кровеносного сосуда в ходе операции изменяется в любой момент времени, так что относительно стабильное изображение кровеносного сосуда не может быть получено, а также не может быть получена постоянная планируемая траектория перемещения, которая может использоваться для генерирования команды автоматической навигации.
[0045] В некоторых вариантах осуществления, команды ручного управления включают, по меньшей мере, одну из команд автоматической паузы, команд автоматического возобновления, команд корректировки планируемой траектории перемещения и команд ручной навигации. Например, когда состояние перемещения медицинского интервенционного устройства не соответствует ожиданиям, врач может активировать автоматическую паузу на сенсорной панели 1016 (ФИГ. 1 (b)) для генерирования команды автоматической паузы и отправки команды автоматической паузы в исполнительный механизм 102. После приостановки исполнительного механизма 102, врач может проверить, что ошибки отсутствуют, и активировать автоматическое возобновление на сенсорной панели 1016 для генерирования и отправки команды автоматического возобновления в исполнительный механизм 102. Во-вторых, после получения планируемой траектории перемещения на основе изображения, содержащего физиологическую трубчатую структуру, врач также может проверить планируемую траекторию перемещения, и если планируемая траектория перемещения имеет большее отклонение от фактического положения размещения кровеносного сосуда, врач может скорректировать планируемую траекторию перемещения, так что генерируется команда корректировки планируемой траектории перемещения, и дополнительно повышается точность команды автоматической навигации. В роботизированной хирургии, как только врач обнаруживает проблему и полагает, что робот не может продолжать выполнение роботизированной хирургической операции, врач отправляет команду ручной навигации в исполнительный механизм 102 для осуществления ручного управления. Средство отображения 1012 дополнительно выполнено с возможностью отображения планируемой траектории перемещения, и отображаемая планируемая траектория перемещения изменяется вручную в ответ на команду корректировки планируемой траектории перемещения, таким образом, пользователь может проверить планируемую траекторию перемещения, чтобы убедиться в соответствии планируемой траектории перемещения фактическому положению кровеносного сосуда.
[0046] В некоторых вариантах осуществления, интраоперационное изображение анализируется для определения ветвления и изгиба сосуда, а также ширины сосуда перед продвижением медицинского интервенционного устройства, и если количество ветвей сосуда впереди превышает первое пороговое значение, или изгиб больше второго порогового значения, или ширина сосуда меньше третьего порогового значения, тогда генерируется команда автоматической навигации для снижения скорости продвижения медицинского интервенционного устройства, таким образом, повышая безопасность автоматизированной операции. В частности, как показано на ФИГ. 4, на этапе S401, определяется ветвление кровеносного сосуда, полная характеристика и ширина кровеносного сосуда перед продвижением медицинского интервенционного устройства, на этапе S402, определяется, превышает ли количество ветвей кровеносного сосуда первое пороговое значение, если количество ветвей кровеносного сосуда превышает первое пороговое значение, указывается, что распределение кровеносного сосуда в данном положении является сложным, что приводит к значительным трудностям в процессе продвижения медицинского интервенционного устройства, в это время, на этапе S405 выполняется генерирование команды автоматической навигации для снижения скорости продвижения, и автоматизированная операция выполняется при более низкой скорости продвижения, таким образом, повышая безопасность операции. Если количество ветвей кровеносного сосуда не превышает первое пороговое значение, непрерывно выполняется этап S403 для определения того, превышает ли изгиб второе пороговое значение, и если изгиб превышает второе пороговое значение, указывается, что степень изгиба кровеносного сосуда является высокой, что может привести к возникновению опасности, в это время, на этапе S405 также выполняется генерирование команды автоматической навигации для снижения скорости продвижения, чтобы медицинское интервенционное устройство продвигалось по траектории перемещения с высокой извилистостью при низкой скорости. Кроме того, если изгиб не превышает второе пороговое значение, непрерывно оценивается, не превышает ли ширина кровеносного сосуда третье пороговое значение (этап S404), и если ширина кровеносного сосуда не превышает третье пороговое значение, ширина кровеносного сосуда является узкой, что неблагоприятно для продвижения медицинского интервенционного устройства при высокой скорости, следовательно, также генерируется команда автоматической навигации для снижения скорости продвижения (этап S405), чтобы обеспечить возможность медицинскому интервенционному устройству выполнять автоматизированную операцию при безопасной скорости, и обеспечивается безопасность операции. Первое пороговое значение, второе пороговое значение и третье пороговое значение могут представлять собой значения, заданные вручную, или значения, автоматически заданные системой, что, в частности, не ограничивается. Для различных состояний кровеносного сосуда, могут быть выбраны различные скоростные режимы, заданы различные стратегии для сокращения времени выполнения операции и повышения эффективности операции. На основе приведенного выше анализа и вычислений, оптимальная траектория перемещения и оптимальный режим выполнения представляются врачу на дисплее 1015, а также приводится множество альтернативных режимов выполнения, так что врачу необходимо подтвердить системе переход к следующему этапу в соответствии с фактическим состоянием пациента, таким как состояние заболевания. Приведенное выше представляет собой только один пример и не предназначено для ограничения объема правовой охраны.
[0047] В некоторых вариантах осуществления, по меньшей мере, один процессор дополнительно выполнен с возможностью приема первого параметра перемещения от исполнительного механизма для управления медицинским интервенционным устройством, определения второго параметра перемещения медицинского интервенционного устройства на основе интраоперационного изображения, сравнения первого параметра перемещения и второго параметра перемещения для определения отклонения, и продолжения генерирования и передачи команды автоматической навигации в случае, если определенное отклонение не превышает четвертое пороговое значение, таким образом, обеспечивая безопасное выполнение автоматизированной процедуры. В частности, как показано на ФИГ. 5, на этапе S501, получают отклонение между первым параметром перемещения и вторым параметром перемещения. Первый параметр перемещения отражает значение релевантного параметра перемещения, ожидаемого и заданного врачом для управления медицинским интервенционным устройством, и второй параметр перемещения отражает значение релевантного параметра перемещения, фактически полученного после управления медицинским интервенционным устройством, и отклонение между первым параметром перемещения и вторым параметром перемещения может отражать точность автоматизированной операции, и чем меньше отклонение, тем лучше результат выполнения автоматизированной операции. Отклонение может представлять собой разницу между первым параметром перемещения и вторым параметром перемещения, и отклонение может быть рассчитано непосредственно системой, или может быть рассчитано вручную врачом, или рассчитано другими возможными способами, что, в частности, не ограничивается. На этапе S502, определяется, превышает ли отклонение четвертое пороговое значение. Если не превышает, на этапе S503 выполняется продолжение генерирования и передачи команды автоматической навигации, и автоматизированная операция выполняется безопасно и эффективно согласно предыдущей настройке.
[0048] Кроме того, на этапе S504, в случае, если определенное отклонение превышает четвертое пороговое значение, генерируется и отправляется команда автоматической паузы, которая приостанавливает движение исполнительного механизма 102, и поддерживается текущее состояние исполнительного механизма 102, и врачу предлагается выполнить проверку (этап S505). Затем, выполняется этап S506 для определения того, подтверждена ли ошибка, и когда ошибка устранена как результат проверки, осуществляется разблокировка и возобновление движения исполнительного механизма 102 (этап S507), так что исполнительный механизм 102 продолжает управление медицинским интервенционным устройством для выполнения автоматизированной операции. Когда результатом проверки является подтверждение ошибки, идентифицируется уровень ошибки (этап S508), и выполняется соответствующая корректировка согласно уровню ошибки. На этапе S509, подтверждается, не превышает ли уровень ошибки пятое пороговое значение, и когда идентифицированный уровень ошибки равен или меньше пятого порогового значения, выполняется этап S511 для корректировки исполнительного механизма 102 до тех пор, пока ошибка не будет устранена, в частности, включая продолжение блокировки и поддержание текущего состояния исполнительного механизма 102, при автоматическом или полуавтоматическом управлении исполнительным механизмом 102 для увеличения, по меньшей мере, одного усилия из сжимающего усилия и толкающего усилия, а также предложение врачу выполнить проверку, пока результатом проверки не станет устранение ошибки. Сжимающее усилие и толкающее усилие имеют критическое значение для управления перемещением медицинского интервенционного устройства в полости, и когда сжимающее усилие или толкающее усилие не может соответствовать требованию, не может быть осуществлено точное управление медицинским интервенционным устройством, к примеру, медицинское интервенционное устройство выпадает в процессе перемещения вследствие того, что сжимающее усилие является небольшим. Подобная неисправность может быть устранена путем увеличения сжимающего усилия, и следовательно, когда система указывает уровень ошибки, равный или ниже уровня пятого порогового значения, отсутствует необходимость в отключении исполнительного механизма 102 интервенционного хирургического робота, пока сжимающее или толкающее усилие увеличивается путем корректировки. Более того, не исключаются другие способы, с помощью которых ошибка может быть устранена путем настройки системы.
[0049] Когда идентифицированный уровень ошибки выше пятого порогового значения, исполнительный механизм 102 отключается, и врачу предлагается переключиться в режим ручного управления (этап S510). В это время, более высокий уровень ошибки означает наличие серьезных проблем в системе, которые сложно устранить путем простой корректировки, и следовательно, когда идентифицированный уровень ошибки выше уровня пятого порогового значения, исполнительный механизм 102 интервенционного хирургического робота отключается, и затем врач выполняет ручное управление, таким образом, предотвращается вред, наносимый пациенту вследствие ошибки системы, и обеспечивается безопасность жизни пациента. Благодаря данному варианту осуществления, может быть решен ряд проблем, связанных с тем, что существующий интервенционный хирургический робот не содержит защитного механизма от нарушений, интервенционный хирургический робот не может оценить аномальное состояние операции, интервенционный хирургический робот не отслеживает аномальное состояние в режиме реального времени, и при возникновении аномальных условий робот своевременно не останавливается, отсутствуют данные обратной связи в режиме реального времени и т.п. Кроме того, шкаф управления 1014 может предложить врачу выполнить проверку путем выдачи предупреждения в случае, если определенное отклонение превышает четвертое пороговое значение. Четвертое пороговое значение и пятое пороговое значение могут представлять собой числовые значения, заданные вручную, или числовые значения системы, заданные по умолчанию, что не ограничивается в настоящем документе.
[0050] В некоторых вариантах осуществления, по меньшей мере, один процессор получает данные сопротивления при перемещении и данные траектории перемещения от исполнительного механизма для управления медицинским интервенционным устройством, средство отображения отображает данные сопротивления при перемещении и данные траектории перемещения, и на основе данных сопротивления при перемещении и данных траектории перемещения, врач может оценить текущее состояние перемещения медицинского интервенционного устройства, а также может оценить, существует ли определенная опасность.
[0051] В некоторых вариантах осуществления, анализ репрезентативного изображения для получения планируемой траектории перемещения включает анализ репрезентативного изображения посредством обучаемой сети для сегментации физиологической трубчатой структуры. Например, полученные данные медицинского изображения подвергаются обработке и вводятся в нейронную сеть глубокого обучения ResUnet с целью обучения, идентифицируются целевые объекты, такие как проволочные проводники, стенты, кровеносные сосуды и т.п., получают обучающие данные, выполняется операция перетасовки данных, изображения преобразуются в изображения фиксированного размера (например, 512 x 512), выполняется обработка путем нормализации, пиксели преобразуются в 0-1, при этом обучающие данные включают медицинские изображения с данными сегментации и маркировки (кровеносные сосуды, проволочные проводники и стенты), для улучшения данных на основе обучающих данных выполняются способы обработки изображений, такие как горизонтальный поворот изображения, вертикальный поворот, произвольное масштабирование, произвольная корректировка яркости, произвольная корректировка контрастности, произвольная корректировка шума и т.п., и улучшенные обучающие данные используются для обучения и тренировки сетевой модели сегментации для получения модели сегментации изображения. Обработка изображения выполняется на основе полученных данных медицинского изображения, полученные данные медицинского изображения вводятся в нейронную сеть глубокого обучения ResUnet с целью обучения, результат обучения сравнивается с обучающими данными, значение потерь вычисляется посредством метода вычисления на основе функции потерь перекрестной энтропии, и значение потерь подвергается обработке посредством метода обратного распространения ошибки для обновления веса. Выделение кровеносных сосудов и других признаков выполняется посредством нейронной сети глубокого обучения, эффективность выделения признаков может быть значительно улучшена, и метод является основной гарантией для реализации навигации в режиме реального времени. Модель нейронной сети глубокого обучения может представлять собой сетевую модель сегментации, такую как ResUnet и attentionUnet, что, в частности, не ограничивается. Сетевая модель сегментации обучается и тренируется с применением обучающих данных медицинских изображений с различными данными сегментации и маркировки (кровеносные сосуды, проволочные проводники и стенты), таким образом, может быть получена модель сегментации изображения, и обеспечиваются точность и скорость сегментации объекта сегментации с использованием полученной модели сегментации изображения. Нейронная сеть глубокого обучения может быть реализована с применением программной библиотеки Tensorflow для выполнения глубокого обучения.
[0052] В автоматизированном операционном процессе, интервенционная роботизированная система передает изображение в режиме реального времени в обученную сетевую модель, сетевая модель выдает результат распознавания в соответствии с правилом обучения, физиологическая трубчатая структура сегментируется, данные операций врача и выходной результат сетевой модели преобразуются в команду навигации посредством обработки изображения и вычислений. Центральная линия физиологической трубчатой структуры выделяется с использованием участка поражения в качестве конечной части, результата прогнозирования сети кровеносных сосудов в качестве "пути", и репрезентативной части медицинского интервенционного устройства (например, проволочный проводник, катетер или стент) в качестве начальной части. Выделенная центральная линия может быть непосредственно использована в качестве планируемой траектории перемещения, ручное вмешательство может быть запущено для корректировки центральной линии, и скорректированная центральная линия снова используется в качестве планируемой траектории перемещения для обеспечения безопасности роботизированной операции.
[0053] В некоторых вариантах осуществления, по меньшей мере, один процессор 1011 дополнительно выполнен с возможностью осуществления анализа и обработки репрезентативного изображения для идентификации поражения. Средство отображения 1012 дополнительно выполнено с возможностью отображения идентифицированного поражения для облегчения подтверждения врачом того, корректно ли подтверждение положения поражения. Как показано на ФИГ. 6, на этапе S601, данные изображения, касающиеся репрезентативного изображения кровеносного сосуда, получают и передают в шкаф управления 1014, и в шкафу управления 1014 выполняется анализ морфологии кровеносного сосуда и идентификация участка поражения (этап S602). В частности, после получения шкафом управления 1014 изображения кровеносного сосуда пациента, система выполняет автоматический сопоставительный анализ на основе большого количества данных для диагностирования состояния поражения кровеносного сосуда и обнаружения пораженного участка (например, узкого участка), в это время, система выводит запрос для подтверждения врачом того, является ли анализ состояния поражения точным, т.е. врач определяет, является ли пораженный участок корректным, путем выполнения этапа S603. По меньшей мере, один процессор 1011 дополнительно выполнен с возможностью приема операции взаимодействия пользователя с поражением, при этом операция взаимодействия включает, по меньшей мере, одно действие, выбранное из подтверждения, корректировки и отклонения. Если врач оценивает, что положение поражения корректно, врач выполняет операцию подтверждения и затем переходит к этапу S605. Если врач определяет, что положение поражения является ошибочным, врач выполняет операцию корректировки на этапе S604. Либо, врач непосредственно выполняет операцию отклонения, и система снова осуществляет анализ и обработку данных изображения. Например, врач может скорректировать показатели и параметры системного анализа для повторного анализа системой. В другом варианте осуществления, врач указывает контрастное изображение, подлежащее преобразованию, команда преобразования не ограничивается формой, включает, помимо прочего, рисование точки, рисование окружности, рисование прямоугольника, рисование линии и т.д. на отображаемом изображении, и роботизированная система получает поражение в качестве конечной части путем распознавания команды преобразования врача. После приема подтверждения пользователем поражения (возможно, подвергнутого операции корректировки), процессор 1011 использует подтвержденное поражение в качестве конечной части для получения планируемой траектории перемещения.
[0054] На этапе S605, центральная линия кровеносного сосуда выделяется с применением обучаемой сети на основе идентифицированного поражения в качестве конечной части, и планируемую траекторию перемещения получают из центральной линии кровеносного сосуда. Кроме того, средство отображения 1012 дополнительно выполнено с возможностью отображения запланированной траектории перемещения, так что врач может определить точность запланированной траектории перемещения. На этапе S606, врач определяет, является ли запланированная траектория перемещения подходящей. Например, планируемая траектория перемещения может не совпадать с фактической траекторией перемещения вследствие неточного выделения центральной линии кровеносного сосуда, и в это время, точность и безопасность последующей автоматизированной хирургической операции повышается посредством ручного вмешательства. Кроме того, по меньшей мере, один процессор 1011 дополнительно выполнен с возможностью приема операции взаимодействия пользователя с планируемой траекторией перемещения, при этом операция взаимодействия включает, по меньшей мере, одно действие, выбранное из подтверждения, корректировки и отклонения. В частности, после приема операции корректировки планируемой траектории перемещения пользователем, планируемая траектория перемещения корректируется в ответ на операцию корректировки и отображается в средстве отображения 1012. Например, когда врач определяет, что планируемая траектория перемещения не является подходящей, врач выполняет операцию корректировки (этап S607), и процессор 1011 принимает операцию корректировки врача, выполняет корректировку планируемой траектории перемещения и отображает скорректированную подходящую планируемую траекторию перемещения на дисплее 1015, таким образом, следующий этап может выполняться до тех пор, пока планируемая траектория перемещения отвечает требованиям врача. Процессор 1011, после приема операции подтверждения планируемой траектории перемещения пользователем, генерирует команду автоматической навигации на основе подтвержденной планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства. После получения планируемой траектории перемещения, система рассчитывает, каким образом осуществлять управление действиями исполнительного механизма 102, и конкретное выражение может включать расчет направления поворота, угла поворота, скорости поворота и т.д., каждого привода, и эти данные управления применяются в качестве команд навигации, команды навигации отправляются в исполнительный механизм 102 робота, начинается перемещение, и одновременно осуществляется получение в режиме реального времени данных изображения от устройства для цифровой субтракционной ангиографии 104, и система автоматически оценивает данные положения проволочного проводника и катетера. В частности, как показано на этапе S608, процессор 1011 получает данные изображения проволочного проводника и катетера в ходе операции и определяет текущее состояние перемещения проволочного проводника и катетера, например, определяет параметры перемещения, соответствующие направлению перемещения, положению и т.д., проволочного проводника и катетера. Затем, система определяет, необходимо или нет выполнение ручного вмешательства (этап S609), и если ручное вмешательство необходимо, процессор 1011 получает команду ручного управления врача (этап S610) и передает команду автоматической навигации в исполнительный механизм 102 (этап S613). Например, при возникновении в ходе операции аномальных условий, врач может в любой момент времени приостановить автоматизированную операционную систему и настроить автоматизированную операционную систему в режиме ручного управления. После завершения ручной настройки, режим автоматизированной хирургической операции может быть снова возвращен. При отсутствии необходимости ручного вмешательства, на этапе S611 осуществляется расчет следующего оптимального выполняемого действия и режима выполнения, например, следующее оптимальное выполняемое действие и режим выполнения рассчитываются посредством способа подтверждения команды автоматической навигации для перемещения вперед, команды автоматической навигации, касающейся расстояния продвижения, и команды автоматической навигации для поворота, описанных в приведенных выше вариантах осуществления, и преобразуются в команду действия, которая может быть выполнена машиной, и команда действия отображается на дисплее 1015 для уведомления врача. Затем, на этапе S612, рассчитывается оптимальный режим управления интервенционным хирургическим роботом для следующего этапа, генерируется команда автоматической навигации, команда автоматической навигации передается в исполнительный механизм 102 (этап S613), и исполнительный механизм 102 выполняет автоматическую хирургическую операцию на основе команды автоматической навигации. Врач оценивает результат управления интервенционным хирургическим роботом, рассчитывает отклонение первого параметра перемещения проволочного проводника и катетера, управляемых исполнительным механизмом 102, и второго параметра перемещения, связанного с фактическим результатом, посредством системы, оценивает, превышает ли отклонение четвертое пороговое значение (этап S614), если отклонение превышает четвертое пороговое значение, система предупреждает об опасности (этап S615), предлагает врачу выполнить подтверждение (этап S616), и врач проверяет и корректирует процесс управления. Если отклонение не превышает четвертое пороговое значение, оценивается, являются ли данные сопротивления при перемещении проволочного проводника и катетера нормальными или нет, если не являются нормальными, система предупреждает об опасности и предлагает врачу выполнить проверку и корректировку, и если являются нормальными, продолжается выполнение автоматизированной операции. Дисплей 1015 отображает интраоперационное изображение, и врач может наблюдать, достигает ли проволочный проводник и катетер заданного положения в любой момент времени (этап S618), и если проволочный проводник и катетер достигают заданного положения, процесс завершается, и если проволочный проводник и катетер не достигают заданного положения, процесс возвращается на этап S608 для продолжения. Следовательно, эффективность выполнения автоматизированной операции может быть улучшена, точность и безопасность автоматизированной операции значительно повышаются посредством человеко-машинного взаимодействия, а также могут быть значительно улучшены эффективность и коэффициент выполнения автоматизированной операции.
[0055] На ФИГ. 7 представлена блок-схема способа управления интервенционным хирургическим роботом согласно варианту осуществления изобретения. При этом интервенционная хирургическая роботизированная система 10 используется для управления медицинским интервенционным устройством с целью перемещения в полости физиологической трубчатой структуры пациента. На этапе S701, получают интраоперационное изображение, включающее физиологическую трубчатую структуру, посредством, по меньшей мере, одного процессора 1011 управляющего механизма 101, и команда автоматической навигации генерируется путем выполнения анализа и обработки интраоперационного изображения. На этапе S702, интраоперационное изображение и текущее состояние перемещения медицинского интервенционного устройства представляются с помощью средства отображения 1012. На этапе S703, ручное управление, осуществляемое пользователем, принимается посредством панели управления пользователя 1013, и передается команда ручного управления, соответствующая ручному управлению. На этапе S704, команды, по меньшей мере, от одного процессора 1011 и панели управления пользователя 1013 принимаются посредством исполнительного механизма 102, при этом в исполнительном механизме 102 выполнены роботизированный манипулятор 1021 и концевой привод 1022. На этапе S705, исполнительный механизм 102 управляет медицинским интервенционным устройством для продвижения на основе команды автоматической навигации в случае, когда команда автоматической навигации принята без получения команды ручного управления, и управляет медицинским интервенционным устройством на основе команды ручного управления в случае, когда принята команда ручного управления. Таким образом, представлен способ управления интервенционным хирургическим роботом с ручным контролем и ручным регулированием, и вместе с тем, врачу представляются различные хирургические параметры, и выполняются текущая операция и следующая операция, так что врач может беспрепятственно узнать состояние робота. Врач может остановить и внести корректировки в любой момент времени, после чего операция может продолжаться автоматически.
[0056] В некоторых вариантах осуществления, получение интраоперационного изображения, включающего физиологическую трубчатую структуру, генерирование команды автоматической навигации путем анализа интраоперационного изображения, в частности, включает получение репрезентативного изображения, включающего физиологическую трубчатую структуру, анализ репрезентативного изображения для получения планируемой траектории перемещения, анализ интраоперационного изображения для определения текущего состояния перемещения медицинского интервенционного устройства, и генерирование команды автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства. Следовательно, автоматизированная интервенционная операция может быть завершена, используется оптимальная планируемая траектория перемещения, достигаются более эффективный анализ изображения и стратегии выполнения роботом, а также могут быть значительно улучшены эффективность и коэффициент выполнения.
[0057] В некоторых вариантах осуществления, генерирование команды автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства, в частности, включает получение текущего первого положения и первого направления перемещения репрезентативной части медицинского интервенционного устройства, определение второго положения репрезентативной части в первом направлении перемещения, определение кратчайшей линии соединения между вторым положением репрезентативной части и планируемой траекторией перемещения, определение точки пересечения кратчайшей линии соединения и планируемой траектории перемещения, получение внутреннего угла между линией соединения точки пересечения и первого положения и первым направлением перемещения, и когда внутренний угол меньше первого порогового угла, генерирование команды автоматической навигации для продвижения медицинского интервенционного устройства вдоль планируемой траектории перемещения, чтобы обеспечить безопасность.
[0058] В некоторых вариантах осуществления, генерирование команды автоматической навигации на основе планируемой траектории перемещения и текущего состояние перемещения медицинского интервенционного устройства дополнительно включает определение расстояния между вторым положением и первым положением в качестве расстояния продвижения, когда внутренний угол не превышает первый пороговый угол.
[0059] В некоторых вариантах осуществления, генерирование команды автоматической навигации на основе планируемой траектории перемещения и текущего состояние перемещения медицинского интервенционного устройства дополнительно включает определение угла, на который поворачивается медицинское интервенционное устройство, когда внутренний угол превышает первый пороговый угол, и генерирование команды автоматического поворота, указывающей угол поворота, в качестве команды автоматической навигации.
[0060] Таким образом, на основе способа управления интервенционным хирургическим роботом могут быть облегчены тяжелые условия труда врача и улучшен опыт эксплуатации системы врачом, и способ характеризуется простотой и легкостью реализации.
[0061] В вариантах осуществления изобретения также представлен машиночитаемый носитель данных, в котором хранятся инструкции компьютерной программы, которые, при выполнении процессором 1011, обеспечивают выполнение процессором 1011 способа управления интервенционным хирургическим роботом согласно различным вариантам осуществления изобретения. Носитель данных может включать постоянное запоминающее устройство (ROM), флеш-память, оперативное запоминающее устройство (RAM), динамическое оперативное запоминающее устройство (DRAM), например, синхронное динамическое запоминающее устройство (SDRAM) или синхронное динамическое запоминающее устройство, разработанное компанией Rambus, статическое запоминающее устройство (например, флеш-память, статическое оперативное запоминающее устройство) и т.д., в котором могут храниться выполняемые компьютером инструкции в любом формате.
[0062] Более того, несмотря на то, что в настоящем документе описаны примеры вариантов осуществления, объем включает любые другие и все варианты осуществления изобретения, содержащие эквивалентные элементы, модификации, исключения, комбинации (например, перекрестные аспекты различных вариантов осуществления), адаптации или изменения. Элементы формулы изобретения должны быть интерпретированы в широком смысле на основе терминологии, используемой в формуле изобретения, и не ограничены примерами, описанными в настоящем описании, или примерами, полученными в ходе рассмотрения изобретения, которые следует понимать как неисключительные. Таким образом, предполагается, что описание и примеры рассматриваются только как иллюстрации, с истинным объемом и сущностью, указанными в следующей формуле изобретения, вместе с их полным объемом эквивалентов.
[0063] Приведенное выше описание представлено в иллюстративных целях, а не ограничительных. Например, описанные выше примеры (или один, или несколько их вариантов) могут быть использованы в сочетании друг с другом. К примеру, другие варианты осуществления могут использоваться специалистами в данной области техники после прочтения представленного выше описания. Кроме того, в приведенном выше подробном описании, различные признаки могут быть сгруппированы вместе для упрощения изобретения. Это не следует интерпретировать как означающее, что раскрытый признак, не включенный в формулу изобретения, является существенным для любого пункта формулы изобретения. Скорее объект изобретения может заключаться не только во всех признаках определенного раскрытого варианта осуществления. Таким образом, следующая формула изобретения включена в настоящем документе в подробное описание в качестве примеров или вариантов осуществления, при этом каждый пункт формулы изобретения представляет собой отдельный вариант осуществления, и предполагается, что варианты осуществления могут быть объединены друг с другом в различных сочетаниях или комбинациях. Объем изобретения должен быть определен со ссылкой на прилагаемую формулу изобретения, вместе с полным объемом эквивалентов, на который распространяется формула изобретения.
[0064] Указанные выше варианты осуществления представляют собой только примерные варианты осуществления изобретения, и не предназначены для ограничения настоящего изобретения, объем которого определен формулой изобретения. Различные модификации и эквиваленты могут быть выполнены специалистами в данной области техники в пределах сущности и объема изобретения, и такие модификации и эквиваленты также следует рассматривать, как попадающие в объем настоящего изобретения.
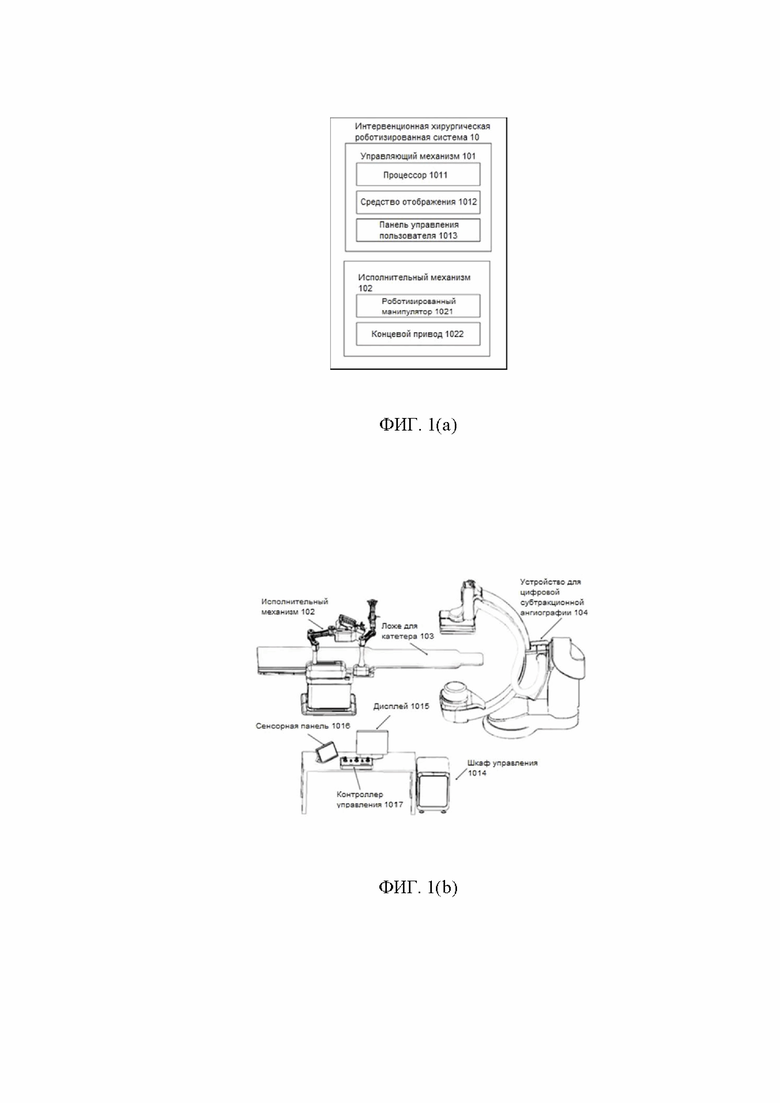
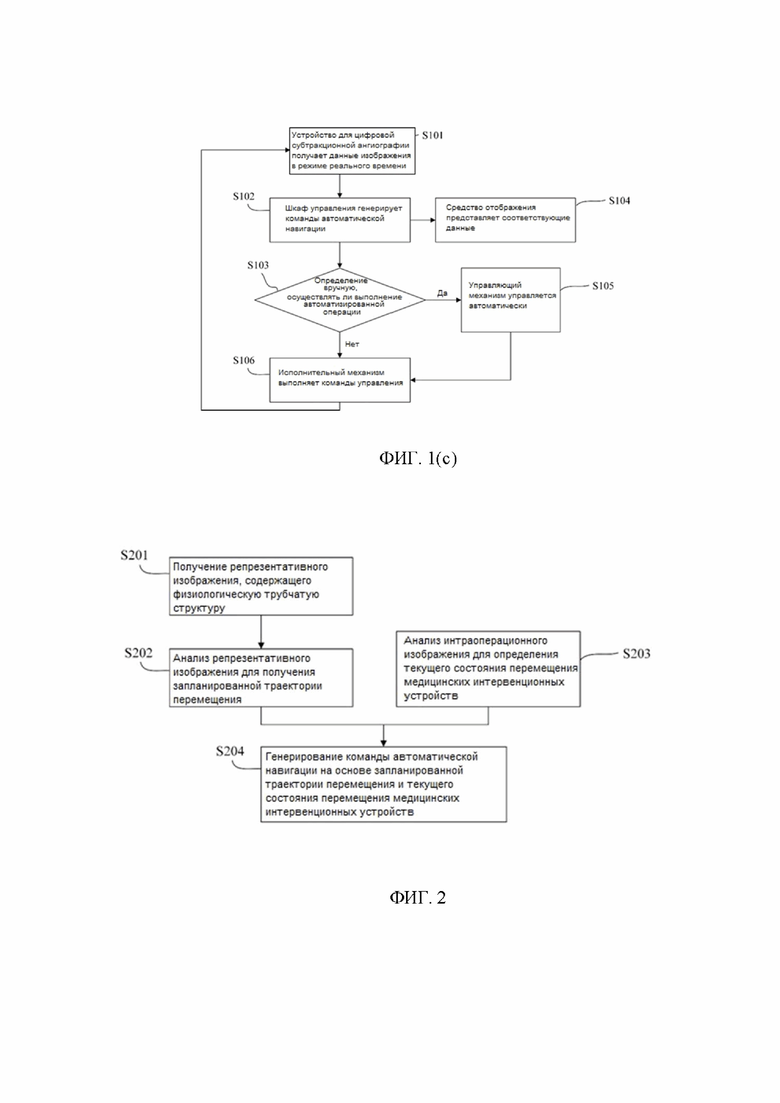
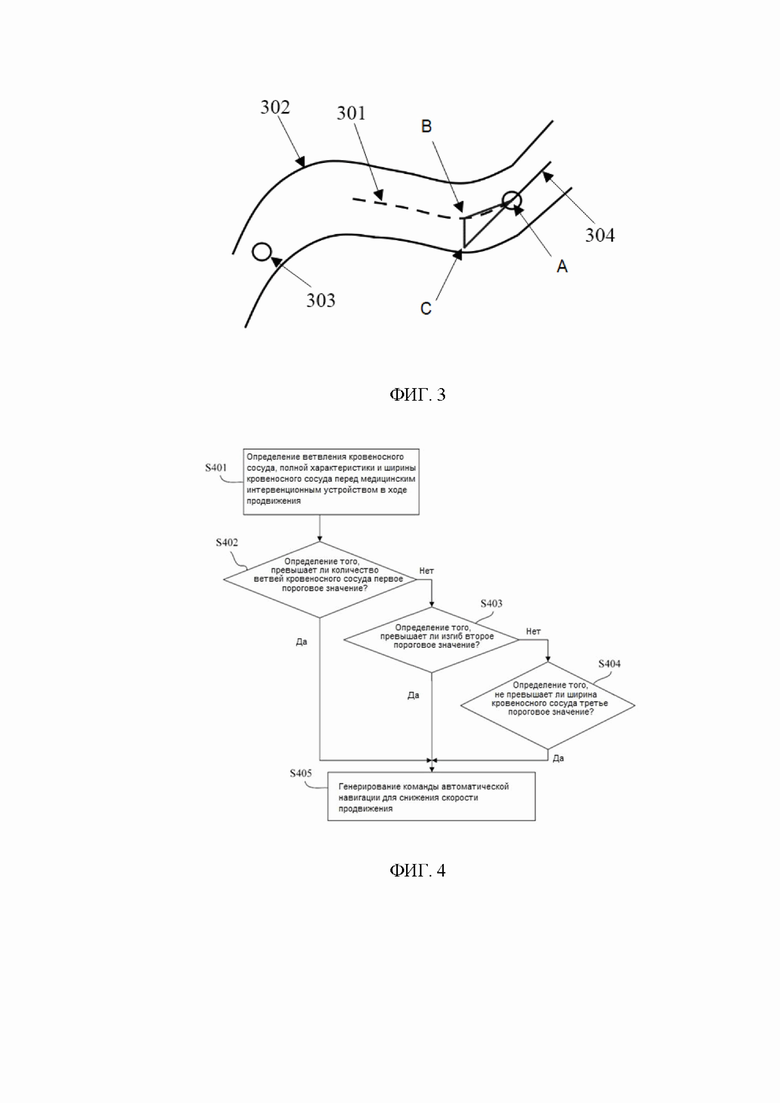
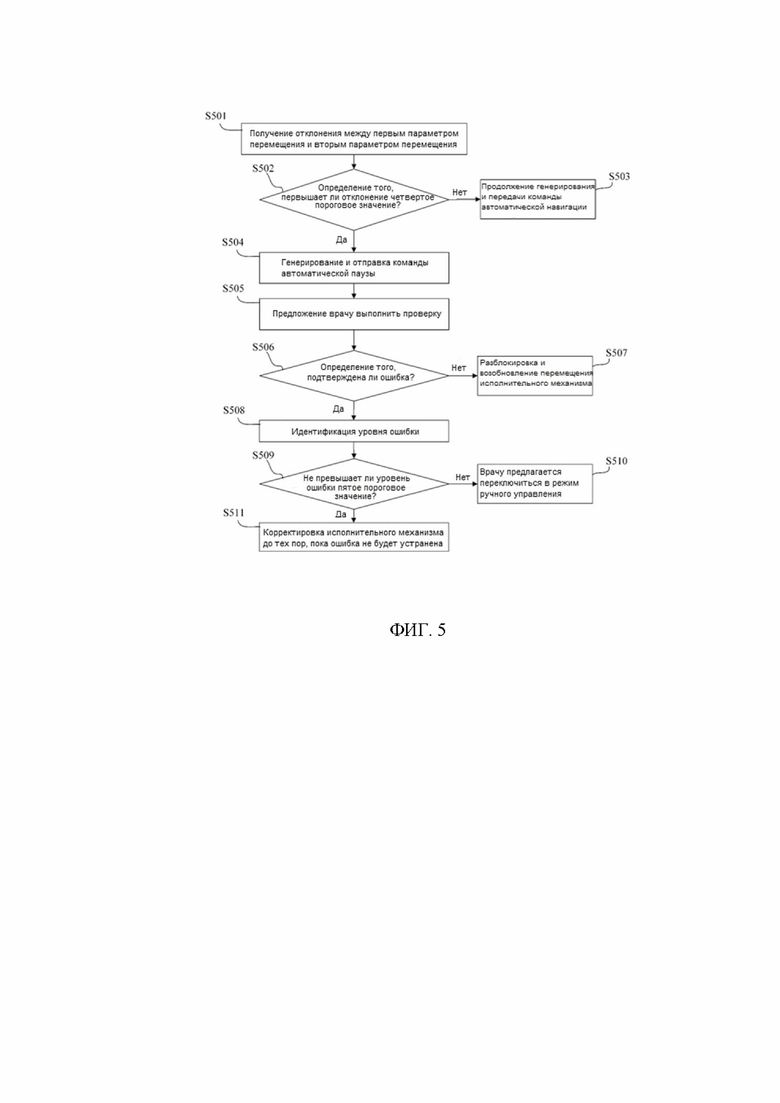
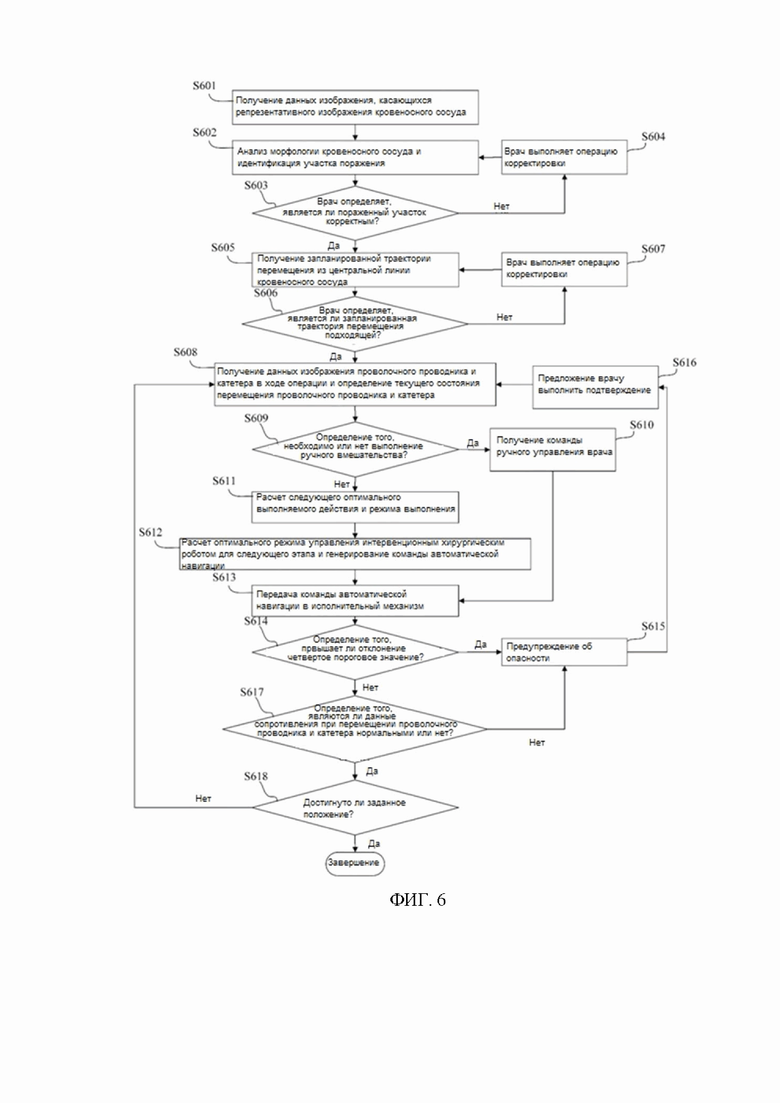
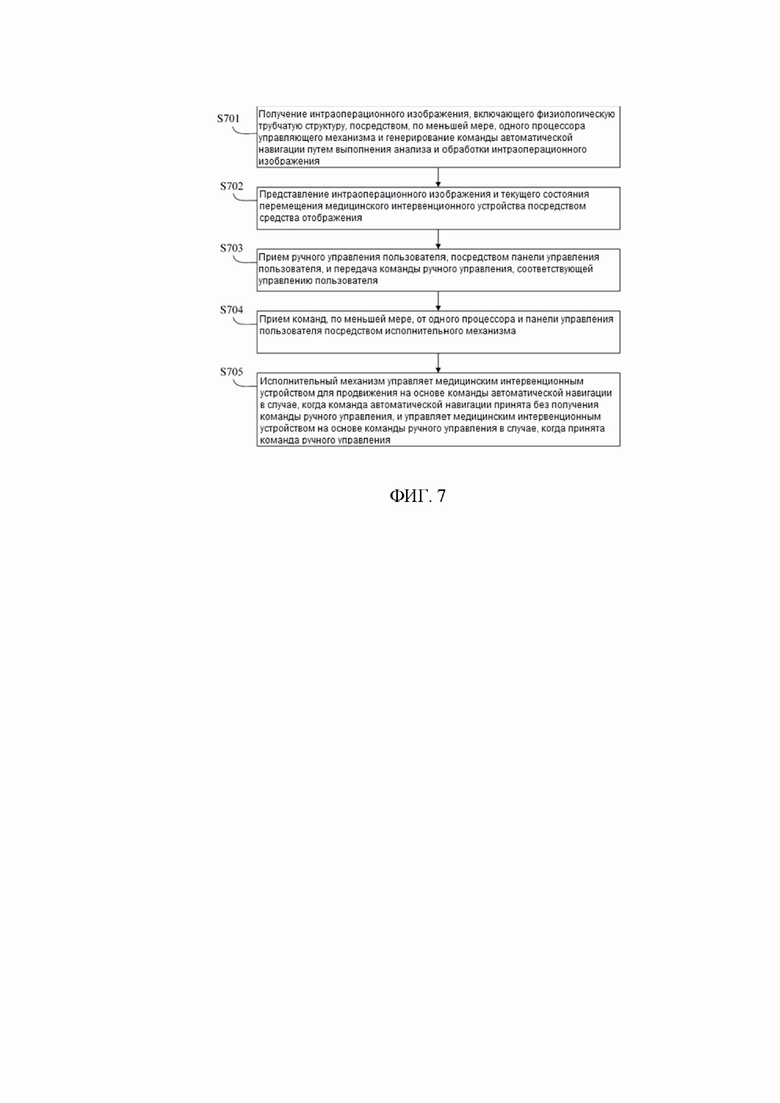
Группа изобретений относится к медицинской технике, а именно к интервенционной хирургической роботизированной системе. Интервенционная хирургическая роботизированная система для управления медицинским интервенционным устройством для продвижения в пределах полости кровеносных сосудов пациента включает: управляющий механизм, включающий: процессор, выполненный с возможностью: получения интраоперационного изображения, содержащего физиологическую трубчатую структуру, и генерирования команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения; средство отображения для отображения интраоперационного изображения и текущего состояния перемещения медицинского интервенционного устройства; и панель управления пользователя, выполненную с возможностью: приема ручного управления пользователя и передачи команды ручного управления, соответствующей ручному управлению; исполнительный механизм, включающий роботизированный манипулятор и концевой привод и выполненный с возможностью: приема команд, от процессора и панели управления пользователя; управления медицинским интервенционным устройством для продвижения на основе команды автоматической навигации в случае, если команда автоматической навигации принята без получения команды ручного управления, или управления медицинским интервенционным устройством на основе команды ручного управления в случае, если принята команда ручного управления. Способ управления интервенционным хирургическим роботом для управления медицинским интервенционным устройством для перемещения в полости кровеносных сосудов пациента включает: получение интраоперационного изображения, содержащего физиологическую трубчатую структуру, посредством процессора управляющего механизма, и генерирование команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения; отображение интраоперационного изображения и текущего состояния перемещения медицинского интервенционного устройства посредством средства отображения; прием ручного управления пользователя посредством панели управления пользователя и передачу команды ручного управления, соответствующей ручному управлению; прием команд, от процессора и панели управления пользователя посредством исполнительного механизма. В исполнительном механизме выполнены роботизированный манипулятор и концевой привод. Исполнительный механизм выполнен с возможностью: управления медицинским интервенционным устройством для продвижения на основе команды автоматической навигации в случае, если команда автоматической навигации принята без получения команды ручного управления, или управления медицинским интервенционным устройством на основе команды ручного управления в случае, если принята команда ручного управления. Машиночитаемый носитель данных, в котором хранятся инструкции компьютерной программы для выполнения процессором, выполненным с возможностью выполнения способа управления интервенционным хирургическим роботом для управления медицинским интервенционным устройством для перемещения в полости кровеносных сосудов пациента. Техническим результатом является реализация функции автоматической навигации и взаимодействия между интервенционной хирургической роботизированной системой и врачом. 3 н. и 18 з.п. ф-лы, 7 ил.
1. Интервенционная хирургическая роботизированная система для управления медицинским интервенционным устройством для продвижения в пределах полости кровеносных сосудов пациента, включающая:
управляющий механизм, включающий:
процессор, выполненный с возможностью:
получения интраоперационного изображения, содержащего физиологическую трубчатую структуру, и генерирования команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения;
средство отображения для отображения интраоперационного изображения и текущего состояния перемещения медицинского интервенционного устройства; и
панель управления пользователя, выполненную с возможностью:
приема ручного управления пользователя и передачи команды ручного управления, соответствующей ручному управлению;
исполнительный механизм, включающий роботизированный манипулятор и концевой привод и выполненный с возможностью:
приема команд, от процессора и панели управления пользователя;
управления медицинским интервенционным устройством для продвижения на основе команды автоматической навигации в случае, если команда автоматической навигации принята без получения команды ручного управления, или управления медицинским интервенционным устройством на основе команды ручного управления в случае, если принята команда ручного управления.
2. Интервенционная хирургическая роботизированная система по п. 1, отличающаяся тем, что процессор выполнен с возможностью получения интраоперационного изображения, содержащего физиологическую трубчатую структуру, и генерирования команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения, при этом процессор выполнен с возможностью получения изображения, содержащего физиологическую трубчатую структуру, а также анализ и обработку изображения для получения планируемой траектории перемещения;
анализ интраоперационного изображения для определения текущего состояния перемещения медицинского интервенционного устройства; и
генерирование команды автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства.
3. Интервенционная хирургическая роботизированная система по п. 2, отличающаяся тем, что процессор выполнен с возможностью генерирования команд автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства, при этом процессор выполнен с возможностью получения текущего первого положения и первого направления перемещения части медицинского интервенционного устройства, определения второго положения части медицинского интервенционного устройства в первом направлении перемещения, определения кратчайшей линии соединения между вторым положением части медицинского интервенционного устройства и планируемой траекторией перемещения, определения точки пересечения кратчайшей линии соединения и планируемой траектории перемещения, получения внутреннего угла между линией соединения точки пересечения и первого положения и первым направлением перемещения и генерирования команды автоматической навигации для продвижения, когда внутренний угол меньше первого порогового угла.
4. Интервенционная хирургическая роботизированная система по п. 3, отличающаяся тем, что процессор выполнен с возможностью генерирования команд автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства, при этом процессор выполнен с возможностью определения расстояния между вторым положением и первым положением в качестве расстояния продвижения, когда внутренний угол не превышает первый пороговый угол.
5. Интервенционная хирургическая роботизированная система по п. 3, отличающаяся тем, что процессор выполнен с возможностью генерирования команды автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства, при этом процессор выполнен с возможностью определения угла, в соответствии с которым медицинское интервенционное устройство выполнено с возможностью управления для поворота, когда внутренний угол больше первого порогового угла, и генерирования команды автоматического поворота, предписывающей поворот на заданный угол, в качестве команды автоматической навигации.
6. Интервенционная хирургическая роботизированная система по п. 2, отличающаяся тем, что планируемая траектория перемещения остается постоянной в ходе операции, и изображение физиологической трубчатой структуры включает изображение сосуда из ряда, включающего сосуд с нервом, висцеральный сосуд и периферический сосуд.
7. Интервенционная хирургическая роботизированная система по п. 1, отличающаяся тем, что команда ручного управления выбрана из ряда, содержащего команду автоматической паузы, команду автоматического возобновления, команду корректировки планируемой траектории перемещения и команду ручной навигации, средство отображения дополнительно выполнено с возможностью отображения планируемой траектории перемещения, при этом отображаемая планируемая траектория перемещения изменяется вручную в ответ на команду корректировки планируемой траектории перемещения.
8. Интервенционная хирургическая роботизированная система по п. 1, отличающаяся тем, что процессор дополнительно выполнен с возможностью:
анализа интраоперационного изображения для определения ветвления сосуда, состояний изгиба и ширины сосуда до продвижения медицинского интервенционного устройства; и
генерирования команды автоматической навигации для снижения скорости продвижения медицинского интервенционного устройства, если количество ветвей кровеносного сосуда впереди превышает первое пороговое значение, или изгиб больше второго порогового значения, или ширина кровеносного сосуда меньше третьего порогового значения.
9. Интервенционная хирургическая роботизированная система по п. 1, отличающаяся тем, что процессор дополнительно выполнен с возможностью:
приема первого параметра перемещения от исполнительного механизма для управления медицинским интервенционным устройством;
определения второго параметра перемещения медицинского интервенционного устройства на основе интраоперационного изображения;
сравнения первого параметра перемещения и второго параметра перемещения для определения отклонения; и
непрерывного генерирования и отправки команды автоматической навигации при условии, что отклонение не превышает четвертое пороговое значение.
10. Интервенционная хирургическая роботизированная система по п. 9, отличающаяся тем, что процессор дополнительно выполнен с возможностью:
генерирования и отправки команды автоматической паузы при условии, что отклонение превышает четвертое пороговое значение; при этом процессор выполнен с возможностью генерирования и отправки команды автоматической паузы, обеспечивающей приостановку перемещения исполнительного механизма, поддержания текущего состояния исполнительного механизма в режиме блокировки, и предложения врачу выполнить проверку;
разблокировки и возобновления перемещения исполнительного механизма, когда результатом проверки является устранение ошибки;
идентификации уровня ошибки, когда результатом проверки является подтверждение ошибки;
продолжения блокировки и поддержания текущего состояния исполнительного механизма, при одновременном автоматическом или полуавтоматическом управлении исполнительным механизмом для увеличения сжимающего и/или толкающего усилия, и предложения врачу выполнить проверку, пока результатом проверки не будет отсутствие ошибки, когда идентифицированный уровень ошибки равен или меньше пятого порогового значения; и
обеспечения возможности исполнительному механизму и предложения врачу переключиться в режим ручного управления, когда идентифицированный уровень ошибки выше пятого порогового значения.
11. Интервенционная хирургическая роботизированная система по п. 9, отличающаяся тем, что выполнена с возможностью формирования предупреждения об опасности в случае, если отклонение превышает четвертое пороговое значение.
12. Интервенционная хирургическая роботизированная система по п. 1, отличающаяся тем, что процессор выполнен с возможностью приема данных сопротивления при перемещении и данных траектории перемещения от исполнительного механизма для управления медицинским интервенционным устройством, при этом средство отображения выполнено с возможностью отображения данных сопротивления при перемещении и данных траектории перемещения.
13. Интервенционная хирургическая роботизированная система по п. 2, отличающаяся тем, что процессор выполнен с возможностью анализа изображения для получения планируемой траектории перемещения, при этом анализа и обработки изображения посредством обучаемой сети для сегментации физиологической трубчатой структуры, использования части медицинского интервенционного устройства в качестве начальной части и участка поражения в качестве конечной части, выделения центральной линии физиологической трубчатой структуры и получения планируемой траектории перемещения в соответствии с выделенной центральной линией.
14. Интервенционная хирургическая роботизированная система по п. 2, отличающаяся тем, что процессор дополнительно выполнен с возможностью анализа изображения для идентификации поражения;
средство отображения дополнительно выполнено с возможностью отображения идентифицированного поражения;
процессор дополнительно выполнен с возможностью приема операции взаимодействия пользователя с поражением, при этом операция взаимодействия включает действие, выбранное из подтверждения, корректировки и отклонения или их комбинации и после приема подтверждения поражения пользователем передачи исполнительному механизму планируемой траектории перемещения с подтвержденным поражением в качестве конечной части.
15. Интервенционная хирургическая роботизированная система по п. 7, отличающаяся тем, что средство отображения дополнительно выполнено с возможностью отображения планируемой траектории перемещения; процессор дополнительно выполнен с возможностью:
приема операции взаимодействия пользователя с планируемой траекторией перемещения, при этом операция взаимодействия включает действие, выбранное из подтверждения, корректировки и отклонения или их комбинации;
генерирования команды автоматической навигации на основе подтвержденной планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства после приема операции подтверждения планируемой траектории перемещения пользователем; и
корректировки планируемой траектории перемещения в ответ на операцию корректировки для отображения посредством средства отображения после приема операции корректировки пользователя планируемой траектории перемещения.
16. Способ управления интервенционным хирургическим роботом для управления медицинским интервенционным устройством для перемещения в полости кровеносных сосудов пациента, включающий:
получение интраоперационного изображения, содержащего физиологическую трубчатую структуру, посредством процессора управляющего механизма, и генерирование команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения;
отображение интраоперационного изображения и текущего состояния перемещения медицинского интервенционного устройства посредством средства отображения;
прием ручного управления пользователя посредством панели управления пользователя и передачу команды ручного управления, соответствующей ручному управлению;
прием команд, от процессора и панели управления пользователя посредством исполнительного механизма; при этом в исполнительном механизме выполнены роботизированный манипулятор и концевой привод, и исполнительный механизм выполнен с возможностью:
управления медицинским интервенционным устройством для продвижения на основе команды автоматической навигации в случае, если команда автоматической навигации принята без получения команды ручного управления, или управления медицинским интервенционным устройством на основе команды ручного управления в случае, если принята команда ручного управления.
17. Способ управления по п. 16, отличающийся тем, что этап получения интраоперационного изображения, содержащего физиологическую трубчатую структуру, и генерирования команды автоматической навигации путем выполнения анализа и обработки интраоперационного изображения включает:
получение изображения, содержащего физиологическую трубчатую структуру, а также анализ и обработку изображения для получения планируемой траектории перемещения;
анализ интраоперационного изображения для определения текущего состояния перемещения медицинского интервенционного устройства; и
генерирование команды автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства.
18. Способ управления по п. 17, отличающийся тем, что этап генерирования команд автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства включает:
получение текущего первого положения и первого направления перемещения части медицинского интервенционного устройства;
определение второго положения части медицинского интервенционного устройства в первом направлении перемещения;
определение кратчайшей линии соединения между вторым положением части медицинского интервенционного устройства и планируемой траекторией перемещения;
определение точки пересечения кратчайшей линии соединения и планируемой траектории перемещения;
получение внутреннего угла между линией соединения точки пересечения и первого положения и первым направлением перемещения; и
генерирование команды автоматической навигации для продвижения, когда внутренний угол меньше первого порогового угла.
19. Способ управления по п. 18, отличающийся тем, что этап генерирования команд автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства дополнительно включает:
определение расстояния между вторым положением и первым положением в качестве расстояния продвижения, когда внутренний угол не превышает первый пороговый угол.
20. Способ управления по п. 18, отличающийся тем, что этап генерирования команд автоматической навигации на основе планируемой траектории перемещения и текущего состояния перемещения медицинского интервенционного устройства дополнительно включает:
определение угла, в соответствии с которым медицинским интервенционным устройством управляют для поворота, и генерирование команды автоматического поворота, указывающей поворот на заданный угол, в качестве команды автоматической навигации, когда внутренний угол больше первого порогового угла.
21. Машиночитаемый носитель данных, в котором хранятся инструкции компьютерной программы для выполнения процессором, выполненным с возможностью выполнения способа управления по любому из пп. 16-20.
| US 20190228528 A1, 25.07.2019 | |||
| US 2022160428 A1, 26.05.2022 | |||
| WO 2022088537 A1, 05.05.2022 | |||
| US 11147635 B1, 19.10.2021 | |||
| Узел иглы, включающий выровненный магнитный элемент | 2013 |
|
RU2669621C2 |
