Изобретение относится к измерительной технике и направлено на повышение достоверности измерительной информации, поступающей от волоконно-оптических датчиков (ВОД) перемещений, расширение диапазона измерений, повышение идентичности характеристик ВОД и, как следствие, обеспечение взаимозаменяемости и ремонтопригодности датчиков.
В ряде случаев традиционные методы метрологического обеспечения датчиков оказываются неприемлемыми или неэффективными, что диктует необходимость проведения дистанционного контроля метрологической исправности датчиков без демонтажа или длительного прерывания режима эксплуатации [1]. Это актуально, например, при мониторинге состояния строительных сооружений с помощью датчиков деформаций, заложенных непосредственно внутри железобетонных конструкций, доступ к которым невозможен в ходе эксплуатации сооружения.
Известен ВОД перемещений [2], содержащий источник света и фотоприемное устройство, связанные с преобразователем перемещений в виде оптоволоконного кольца с радиусом, зависящим от перемещения контролируемого объекта. Принцип работы указанного ВОД основан на зависимости коэффициента пропускания изогнутого участка световода от радиуса изгиба световода. Недостатками данного ВОД являются: отсутствие контроля метрологической исправности преобразователя перемещения и ограниченный диапазон измерений, связанные, с одной стороны, существенным уменьшением чувствительности к перемещению с ростом радиуса кривизны, и с другой стороны - с уменьшением прочности и долговечности участка световода с изгибом при уменьшении радиуса изгиба, что приводит к снижению надежности ВОД при длительных измерениях.
Наиболее близким к изобретению техническим решением является ВОД перемещений [3], содержащий источник излучения, фотоизмерительное устройство, подвижный шток (толкатель), корпус и закрепленный в нем оптоволоконный чувствительный элемент (ЧЭ) в виде витков волоконного световода, взаимодействующих со штоком и способных деформироваться при перемещении штока, связанного с контролируемым объектом. ВОД работает следующим образом: перемещение контролируемого объекта вызывает деформацию ЧЭ, что приводит к изменению характеристик оптического излучения на выходе ЧЭ (интенсивность, спектральный состав, поляризация, фаза), регистрируемых фотоизмерительным устройством. По известным функциональным зависимостям между изменениями характеристик излучения и деформацией ЧЭ определяется перемещение объекта. Недостатками указанного ВОД являются: отсутствие контроля метрологической исправности преобразователя перемещения на основе оптоволоконного ЧЭ; ограниченный диапазон измерений, обусловленный предельно допустимыми деформациями витков; сложный вид функции преобразования ВОД, приводящий к необходимости их индивидуальной градуировки, что усложняет взаимозаменяемость датчиков при эксплуатации.
Целью изобретения является обеспечение дистанционного контроля метрологической исправности ВОД, расширение диапазона измерений, улучшение эксплуатационных характеристик датчика (взаимозаменяемость, ремонтопригодность).
Цель достигается тем, что ВОД перемещений, содержащий источник света, фотоизмерительное устройство, корпус, закрепленный в нем чувствительный элемент ВОД перемещений в виде витков волоконного световода, подвижный шток-стержень, связанный с контролируемым объектом, имеет:
1) оптически управляемый элемент (ОУЭ), способный деформироваться под действием падающего на него оптического излучения (например, в виде фотострикционной пластинки), закрепленный одним концом на штоке и/или на корпусе, а другим (рабочим) концом взаимодействующий с оптоволоконным ЧЭ, и, таким образом, обеспечивающий объединенное воздействие на ЧЭ, во-первых, вследствие перемещения штока, во-вторых, из-за дополнительной деформации, создаваемой фотострикционной пластинкой за счет энергии падающего света;
2) дополнительный источник света с регулируемой выходной мощностью и световодом (силовым), передающим оптическое излучение от дополнительного источника к светочувствительному участку поверхности фотострикционной пластинки;
3) вместо дополнительного источника света единственный источник света может быть выполнен импульсным с регулируемой скважностью с обеспечением передачи части оптического излучения (высвета), исходящего с изогнутого участка световода, к светочувствительному участку поверхности фотострикционной или биметаллической пластинки.
Важно отметить следующие технические результаты, обеспечивающие преимущества предложенных средств и способов измерения:
1) в ходе эксплуатации ВОД оптоволоконный ЧЭ не испытывает существенных переменных деформаций, находится, практически, в одном и том же состоянии, что способствует повышению стабильности характеристик и увеличению срока службы ВОД в целом;
2) в предлагаемом ВОД диапазон измерений не ограничивается характеристиками оптоволоконного ЧЭ, но определяется, главным образом, свойствами фотострикционной (биметаллической) пластинки и характеристиками источников света, что существенно снижает требования к точности изготовления оптоволоконного ЧЭ, который является нестандартным изделием;
3) в соответствии с предложенным способом измерений оптоволоконный ЧЭ всегда находится в зоне максимальной чувствительности и, таким образом, во всем рабочем диапазоне ВОД обеспечивается максимальная точность измерения;
4) существенно повышается взаимозаменяемость ВОД, поскольку, во-первых, индивидуальные особенности характеристик оптоволоконных ЧЭ (при их одинаковой максимальной чувствительности) заметно не влияют на характеристики ВОД, во-вторых, фотодеформационные характеристики ОУЭ и соответствующие функции преобразования не имеют особенностей и близки к линейным, а идентичность их свойств гарантируется требованиями ГОСТ.
Указанные преимущества реализуются в волоконно-оптическом датчике перемещений, содержащем:
- корпус, внутри которого размещен, по меньшей мере, один чувствительный элемент, способный изменять, по меньшей мере, одну характеристику входного света от источника света в зависимости от деформации чувствительного элемента,
- толкатель, обеспечивающий передачу перемещения контролируемого объекта на чувствительный элемент, при этом толкатель проходит через стенку корпуса или является стенкой корпуса,
датчик имеет возможность соединения с устройством измерения, по меньшей мере, одной характеристики выходного света от чувствительного элемента,
при этом обеспечивается возможность объединенного воздействия на, по меньшей мере, один чувствительный элемент, посредством толкателя и, по меньшей мере, одного оптически управляемого элемента, реагирующего на изменение мощности оптического излучения, передаваемого ему.
В частных случаях выполнения изобретение может содержать:
- как источник света, обеспечивающий излучение входного света в чувствительный элемент, так и дополнительный источник света со световодом, передающим оптическое излучение от дополнительного источника света к чувствительному участку поверхности оптически управляемого элемента;
- дополнительный импульсный источник света с регулируемой скважностью;
- обеспечение передачи оптического излучения, высвечивающегося из изогнутого участка световода, к светочувствительному участку поверхности оптически управляемого элемента;
- источник света, обеспечивающий излучение входного света в чувствительный элемент, является импульсным с регулируемой скважностью;
- оптически управляемый элемент может быть биметаллическим или фотострикционным;
- сопряжение чувствительного элемента с компенсирующим элементом, который установлен и ориентирован таким образом, чтобы обеспечить при изменении температуры окружающей среды возможность компенсации температурных деформаций оптически управляемого элемента;
- обеспечение уменьшения теплового оттока от деформируемого элемента посредством тепловой развязки между толкателем и концом деформируемого элемента;
- оптически управляемый элемент, являющийся пластинкой, один конец которой связан с толкателем, а другой конец имеет возможность воздействия на чувствительный элемент;
- оптически управляемый элемент, являющийся пластинкой, один конец которой связан с корпусом, а другой конец имеет возможность воздействия на чувствительный элемент.
Вышеуказанные преимущества обеспечиваются способом измерения перемещения, при котором посылают входной свет к, по меньшей мере, одному оптоволоконному чувствительному элементу, способному изменять, по меньшей мере, одну характеристику входного света от источника света в зависимости от воздействия на чувствительный элемент,
- воздействуют на чувствительный элемент толкателем, обеспечивающим передачу перемещения контролируемого объекта,
- измеряют, по меньшей мере, одну характеристику выходного света от чувствительного элемента, в соответствии с которой определяют перемещение контролируемого объекта,
- при этом объединенно воздействуют на, по меньшей мере, один чувствительный элемент, толкателем и, по меньшей мере, одним оптически управляемым элементом, реагирующим на изменения мощности оптического излучения, передаваемого ему.
Предпочтительно способ может содержать следующие действия:
- сначала без воздействия оптически управляемого элемента на чувствительный элемент определяют положение толкателя, при котором достигается максимальная чувствительность чувствительного элемента, а затем при объединенном воздействии толкателя и оптически управляемого элемента на чувствительный элемент измеряют перемещение контролируемого объекта в зоне максимальной чувствительности чувствительного элемента. При объединенном воздействии толкателя и оптически управляемого элемента на чувствительный элемент компенсация перемещения толкателя обеспечивается соответствующим фотоиндуцированным противоположным смещением оптически управляемого элемента. Соответственно положение точки контакта толкателя с чувствительным элементом относительно корпуса остается практически неизменным.
В данном способе может использоваться охарактеризованный выше датчик.
На фиг.1 изображено средство с дополнительным источником света в первом состоянии.
На фиг.2 изображено средство с фотострикционной пластинкой, одним концом закрепленной на корпусе.
На фиг.3 изображено второе состояние средства по фиг.1 после перемещения штока и поясняется способ компенсации перемещения штока S соответствующим фотоиндуцированным смещением Sф от дополнительного источника света.
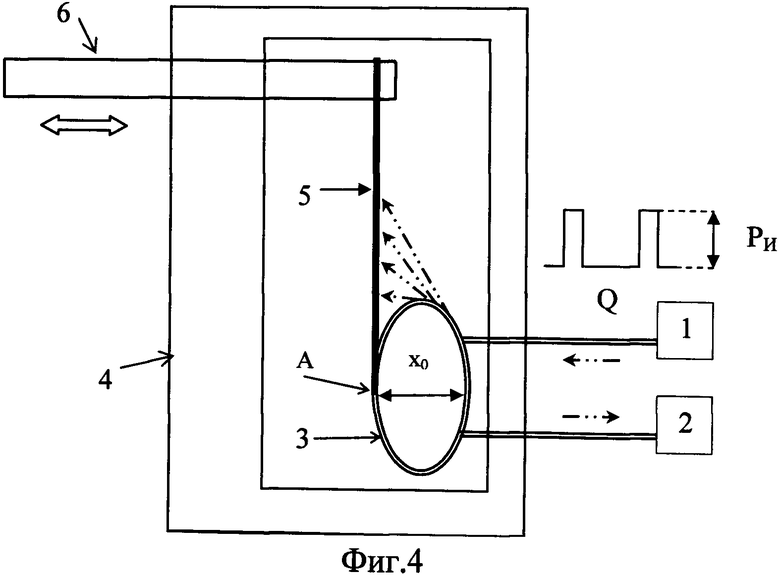
На фиг.4 изображено средство с одним источником света в первом состоянии.
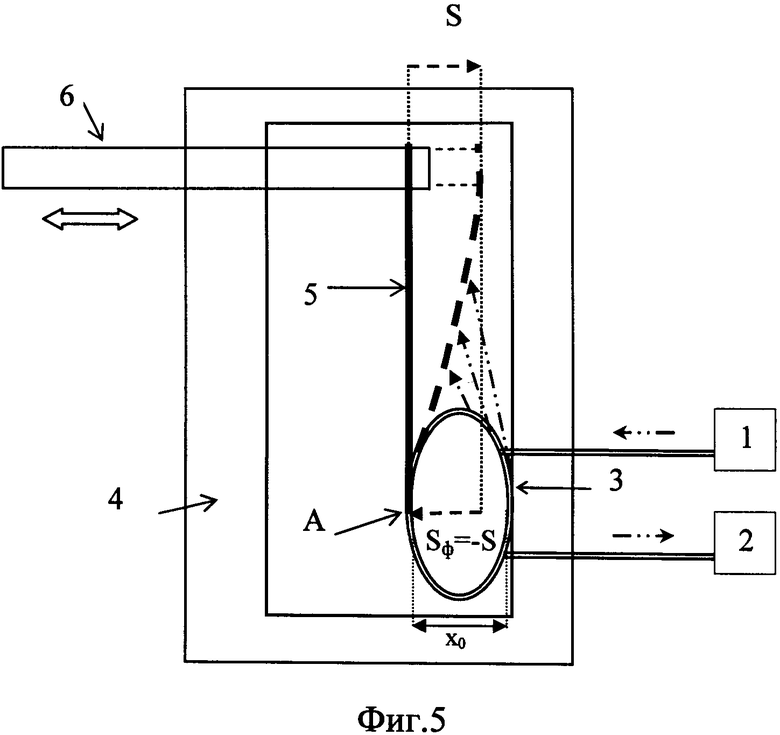
На фиг.5 изображено второе состояние средства после перемещения штока и поясняется способ компенсации перемещения штока S соответствующим фотоиндуцированным противоположным смещением Sф в средстве измерения с одним источником света для обеспечения неподвижности точки A контакта оптоволоконного ЧЭ с фотострикционной пластинкой.
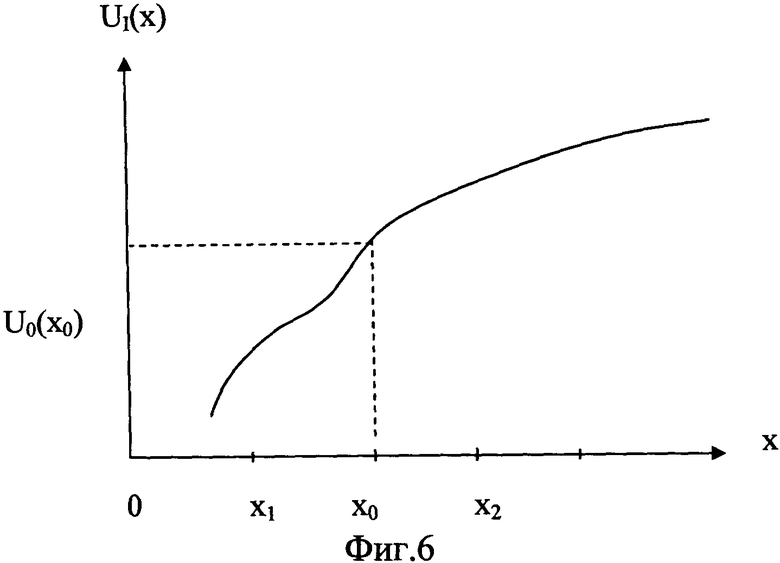
На фиг.6 изображена зависимость выходного сигнала U фотоизмерительного устройства от изменения координаты х точки контакта фотострикционной пластинки и оптоволоконного ЧЭ. В точке x0 достигается максимальная чувствительность K=ΔU/Δx с уровнем выходного сигнала U0=U(x0), при этом измерения в окрестности точки x0 являются наиболее точными.
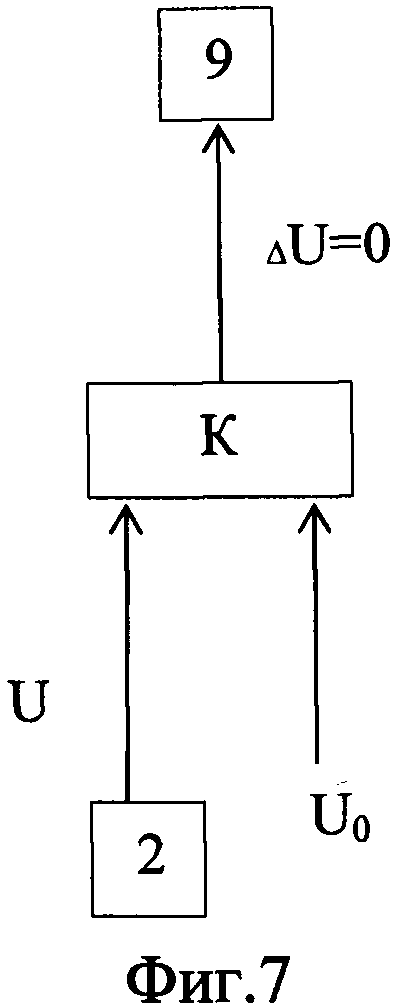
На фиг.7 изображена схема обратной связи между фотоизмерительным устройством и дополнительным источником света для автоматической регулировки выходной мощности дополнительного источника света.
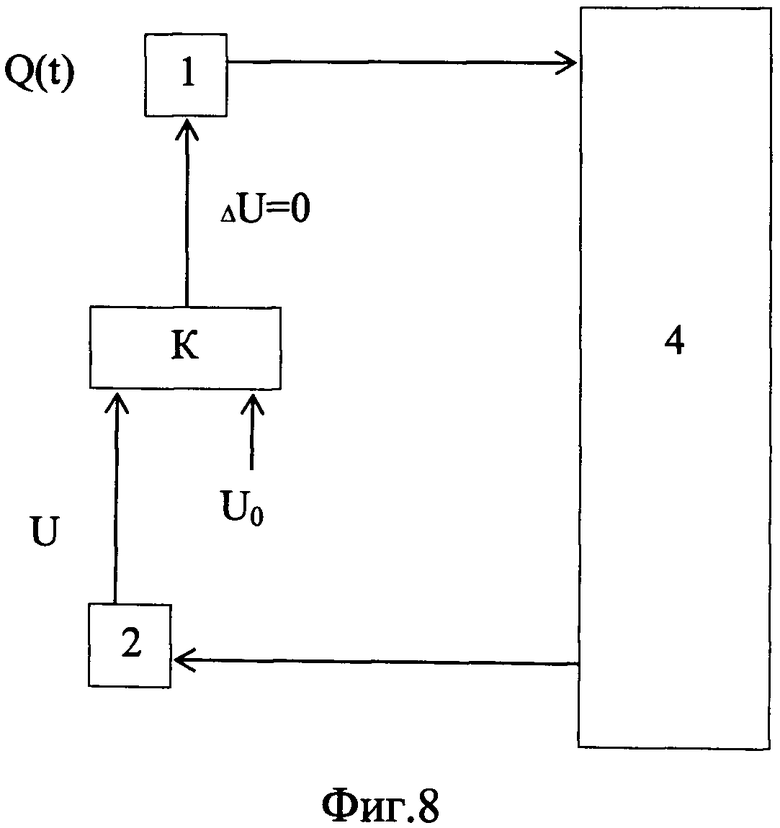
На фиг.8 изображена схема обратной связи между фотоизмерительным устройством и источником света для автоматической регулировки средней выходной мощности импульсного источника света.
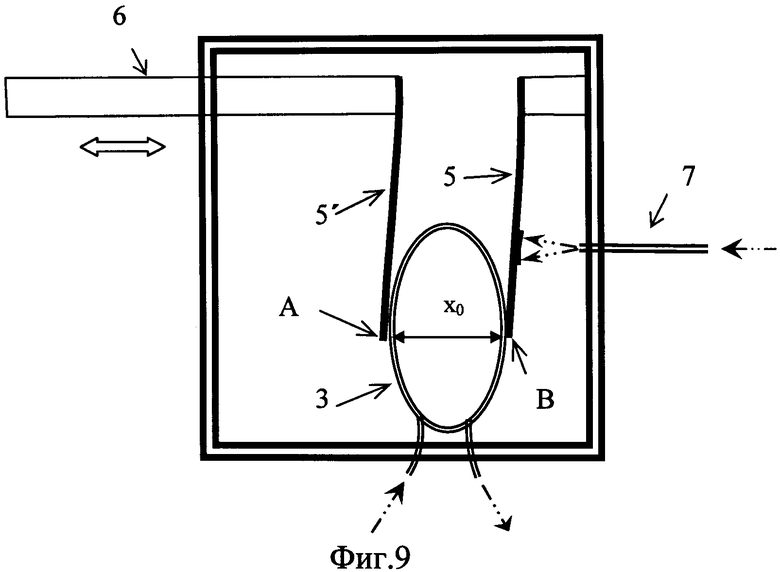
На фиг.9 изображено устройство, имеющее дополнительный источник света, в котором обеспечивается температурная стабильность посредством двух одинаковых фотострикционных или биметаллических пластинок.
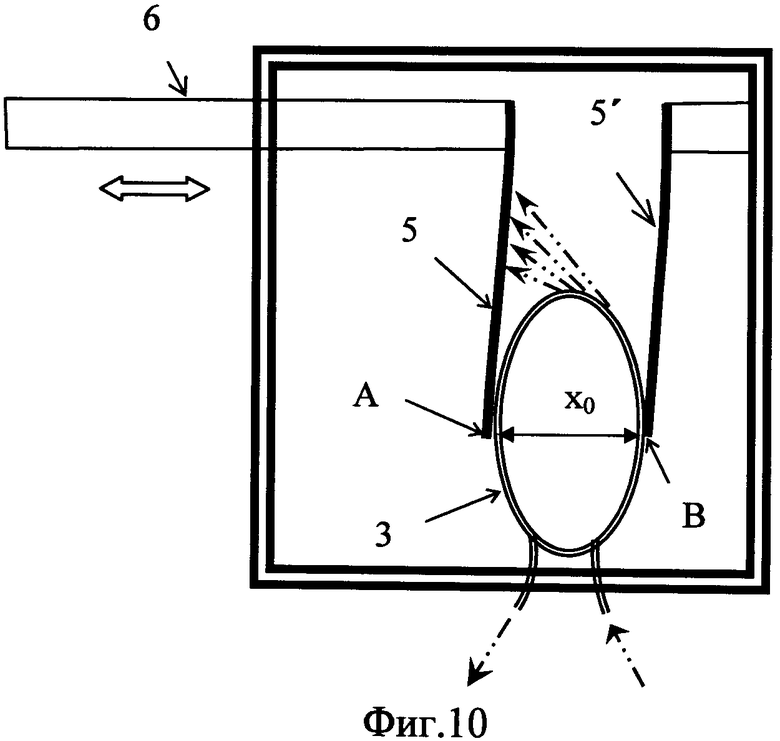
На фиг.10 изображено измерительное устройство с одним источником света, в котором обеспечивается температурная стабильность двух одинаковых фотострикционных или биметаллических пластинок.
На фиг.1 изображено измерительное устройство, имеющее два источника света. ВОД состоит из первого источника 1 света, который имеет стабильные характеристики выходного излучения и связан с фотоизмерительным устройством 2 с помощью оптоволоконного чувствительного элемента 3, который закреплен на корпусе 4 и взаимодействует с биметаллической пластинкой 5, способной испытывать фототермоиндуцированные деформации при ее освещении. Биметаллическая пластинка 5 закреплена одним концом на штоке 6, способном совершать продольные перемещения относительно корпуса 4. В корпусе 4 закреплен силовой световод 7, освещающий светопоглощающий участок поверхности 8 биметаллической пластинки 5 излучением второго (дополнительного) источника 9 света с регулируемой выходной мощностью, регулировка которой может осуществляться простым изменением тока J питания излучателя в соответствии с его ватт-амперной характеристикой P(J). Зависимость между выходной мощностью оптического излучения Р и управляющим параметром J для второго источника 9 света описывается известной функцией Р=P(J). В качестве второго источника 9 света может использоваться, например, полупроводниковый излучатель.
На фиг.2 изображен вариант ВОД, в котором биметаллическая пластинка 5 закреплена на корпусе 4 (например, на кронштейне внутренней стенки корпуса, как изображено на фиг.9, 10), при этом оптоволоконный преобразователь 3 перемещения закреплен на другом (свободном) конце пластинки 5. Поскольку принцип действия обоих вариантов одинаков, поэтому в дальнейшем ограничимся рассмотрением схемы, приведенной на фиг.1.
Принцип действия предлагаемого ВОД основан на компенсации деформаций оптоволоконного ЧЭ, вызванных перемещением контролируемого объекта, путем смещения рабочего конца биметаллической пластины за счет фототермоиндуцированных деформаций изгиба, возникающих при ее нагреве оптическим излучением. Предложенный принцип действия иллюстрируется фиг.3, поясняющей способ компенсации перемещения штока S соответствующим фототермоиндуцированным смещением Sф рабочего конца биметаллической пластинки, в результате которых положение (х - координата) точки A контакта оптоволоконного ЧЭ с биметаллической пластинкой относительно корпуса остается неизменным. Если диапазон измеряемых перемещений находится, например, в пределах (-Smax, +Smax), то необходимо обеспечить возможность фототермоиндуцированных смещений Sф=2·Smax. Величина смещения Sф определяется конструкцией биметаллической пластинки и поглощаемой оптической мощностью P. При условии, что Sф<<L, где L - длина пластинки, зависимость Sф(Р) близка к линейной Sфт=α·Р, где α - коэффициент пропорциональности, характеризующий эффективность преобразования энергии падающего излучения в упругие деформации биметаллической пластинки и зависящий от ее геометрических размеров и термоупругих параметров.
Для повышения эффективности биметаллической пластинки следует обеспечить тепловую развязку между штоком и закрепленным концом пластинки, например посредством крепления пластинки через элемент с низкой теплопроводностью. Тепловой отток к чувствительному элементу предполагается незначительным.
ВОД перемещений работает следующим образом. Вначале, при отключенном втором источнике света определяется градуировочная кривая - функция преобразования U(x) оптоволоконного преобразователя, где U - выходной сигнал фотоизмерительного устройства, х - координата точки контакта биметаллической пластинки и оптоволоконного ЧЭ (фиг.3). Отметим, что в зависимости от контролируемой характеристики оптического излучения (интенсивность (I); спектральный состав (λ); состояние поляризации (θ); фаза (φ)) соответствующие функции преобразования UI(х), Uλ(х), Uθ(х), Uφ(х) являются существенно разными. В частности, качественный характер зависимости UI(x), обусловленный изменением коэффициента пропускания оптоволоконного преобразователя показан на фиг.6. В общем случае, чувствительность преобразователя перемещений, определяемая коэффициентом преобразования K=ΔU/Δx, непостоянна в рабочем интервале (x1, х2) и в определенной точке х=х0 достигает максимального значения Kmax=K(х0) с соответствующим уровнем выходного сигнала U0=U(x0). Очевидно, что измерения в окрестности указанной точки являются наиболее точными.
Перед установкой ВОД на контролируемом объекте, максимальные перемещения которого могут достигать ±Smax, включается дополнительный источник излучения с исходной выходной мощностью Р0, обеспечивающей условие Sфт(P0)=Smax. Далее, шток устанавливается в положение, соответствующее точке х=х0 с уровнем выходного сигнала U=U0. В этом состоянии фиксируется положение штока относительно корпуса и после этого ВОД устанавливается на контролируемом объекте. После установки ВОД на объекте фиксация штока снимается [6] и в дальнейшем осуществляется непрерывная компенсация приращения выходного сигнала фотоизмерительного устройства ΔU=U-U0, обусловленная смещением S штока из исходного положения путем регулировки выходной мощности второго источника излучения. Исходя из текущего значения управляющего параметра Jt, обеспечивающего компенсацию ΔU=0, с помощью известных функциональных зависимостей SФ(Р), P(J) искомое перемещение St определяется как значение сложной функции St=Sф(P(Jt)) в точке Jt. Измерения могут проводиться также в автономном режиме, если введена обратная связь между фотоизмерительным устройством и источником света 9 (фиг.7), осуществляющая автоматическую регулировку выходной мощности излучателя 9 с помощью компаратора (K) до полной компенсации сигнала разбаланса ΔU=U-U0.
Поскольку биметаллическая пластина чувствительна также к изменениям температуры окружающей среды, то для устранения указанного влияния на результаты измерения ВОД вводится вторая биметаллическая пластинка 5' с идентичным характеристиками, закрепленная на корпусе 4. При этом пластины 5 и 5' имеют одинаковую ориентацию (см. фиг.9). Таким образом, чувствительный элемент 3 сопряжен с другой пластинкой 5', один конец которой установлен неподвижно относительно корпуса, а вторая пластинка ориентирована таким образом, чтобы обеспечить возможность компенсации деформации первой пластинки 5. В этом случае при изменении температуры окружающей среды расстояние между точками АВ остается неизменным (т.к. отсутствует температурная деформация оптоволоконного ЧЭ), что позволяет уменьшить погрешность измерения, обусловленную изменениями температуры, в ходе эксплуатации.
Предложенный способ измерения позволяет осуществлять дистанционный контроль исправности преобразователя в любой момент времени благодаря возможности реализации точно заданных эталонных деформаций ЧЭ за счет фотоиндуцированных смещений биметаллической пластинки и сравнения соответствующих выходных сигналов фотоизмерительного устройства с исходными градуировочными данными.
Роль биметаллической пластинки могут выполнять также пластинки из фотострикционных материалов, обладающих свойством деформироваться при освещении оптическим излучением. Данные материалы имеют высокий КПД преобразования энергии света в деформацию пластинки за счет сочетания фотоэлектрического и пьезоэлектрического свойств некоторых материалов. Выполнение пластинки из таких материалов является предпочтительным (фиг.4, 5), т.к. позволяет использовать меньшую мощность излучения за счет эффективного преобразования энергии света в механическое движение, деформирующее пластинку [4], [5].
На фиг.4 изображено измерительное устройство с одним источником света. ВОД состоит из единственного импульсного источника 1 света с регулируемой скважностью импульсов со стабильными характеристиками излучения в импульсах, связанного с фотоизмерительным устройством 2 с помощью оптоволоконного преобразователя перемещения 3, который закреплен на корпусе 4 и взаимодействует с фотострикционной пластинкой 5, закрепленной одним концом на штоке 6, способном совершать перемещения относительно корпуса 4.
Источник света с указанным режимом работы одновременно выполняет две функции:
- во-первых, является источником тестирующего излучения, используемого для контроля состояния чувствительного элемента;
- во-вторых, служит источником излучения, вызывающего фотоиндуцированные деформации фотострикционной пластинки
В качестве источника 1 света может использоваться, например, полупроводниковый излучатель с импульсным током питания с регулируемой скважностью импульсов тока.
Принцип действия предлагаемого ВОД основан также на компенсации деформаций оптоволоконного преобразователя, вызванных перемещением штока, путем смещения рабочего конца фотострикционной пластинки в противоположном направлении за счет фотоиндуцированных деформаций пластинки, возникающих при ее освещении оптическим излучением, высвечивающимся из изогнутого участка световода. Предложенный принцип действия иллюстрируется фиг.3, 5, поясняющими способ компенсации перемещения S штока соответствующим фотоиндуцированным смещением рабочего конца фотострикционной пластинки Sф=-S в противоположном направлении, в результате которых координата точки контакта A оптоволоконного преобразователя с фотострикционной пластинкой остается неизменной. Если диапазон измеряемых перемещений находится, например, в пределах (-S, +S), то необходимо обеспечить возможность фотоиндуцированных смещений Sф=2-S. Величина смещения Sф определяется главным образом конструкцией фотострикционной пластинки и величиной средней оптической мощности Р, падающей на пластинку, которая зависит от скважности импульсов:
P=к·PИ/Q,
где РИ - оптическая мощность излучения в импульсе (в световоде);
Q - скважность импульсов;
к - коэффициент, характеризующий эффективность высвета из изогнутого участка световода.
Предполагаем, что инерционность (постоянная времени) τ фотострикционного материала существенно больше периода T следования импульсов (τ>>T).
При условии, что Sф<<L, где L - длина пластинки, зависимость Sф(P) близка к линейной Sф=α·P, где α - коэффициент пропорциональности, характеризующий эффективность работы пластинки, зависящий от ее геометрических и физических параметров.
ВОД перемещений работает следующим образом. Вначале, при некоторой фиксированной скважности импульсов Q0 определяется градуировочная кривая - функция преобразования U(x) оптоволоконного преобразователя, где U - выходной сигнал фотоизмерительного устройства, х - координата точки контакта A относительно корпуса (фиг.5). В зависимости от контролируемой характеристики оптического излучения (интенсивность (I); спектральный состав (λ); состояние поляризации (θ); фаза (φ)) соответствующие функции преобразования UI(х), Uλ(х), Uθ(х), Uф(х) являются существенно разными. В частности, качественный характер зависимости UI(х), обусловленный изменением коэффициента пропускания оптоволоконного преобразователя показана на фиг.6. Чувствительность преобразователя перемещений, определяемая коэффициентом преобразования K=ΔU/Δx, как правило, непостоянна в рабочем интервале (x1, х2) и в определенной точке х=х0 достигает максимального значения Kmax=K(x0) с соответствующим уровнем выходного сигнала U0=U(x0).
Необходимые характеристики источника излучения, а именно - мощность PИ в импульсе и диапазон (Q1, Q2) регулировки скважности импульсов определяются исходя из величин измеряемых перемещений. Если максимальные перемещения контролируемого объекта составляют (-Smax, +Smax), то оптимальные параметры источника света определяются из условий:
1) 
2) 
где первое условие обеспечивает возможность компенсации положительных смещений штока (0, +Smax) за счет изменения скважности от Q1 до Q0; второе условие - компенсацию отрицательных смещении (-Smax, 0) за счет изменения скважности от Q0 до Q2.
Из соотношений (1, 2) следует:
Поскольку Q1,2≥1, то 
При значении РИ=РИ, min диапазон регулировки скважности составляет (Q1, Q2)(1, ∞).
Измерение перемещений с помощью ВОД происходит следующим образом. Вначале, при скважности импульсов Q=Q0 определяется положение штока, при котором достигается максимальная чувствительность оптоволоконного ЧЭ (х=x0, U=U0). В этом состоянии фиксируется положение штока относительно корпуса и, затем, ВОД устанавливается на контролируемом объекте. После установки ВОД фиксация штока снимается [6] и в дальнейшем за счет регулировки скважности импульсов Q(t) осуществляется непрерывная компенсация (ΔU=0) приращения выходного сигнала фотоизмерительного устройства ΔU=U-U0, обусловленного смещением S(t) штока из исходного положения (S=0).
Измеряемое перемещение S(t) штока определяется выражением:

Измерения могут проводиться также в автономном режиме, если введена обратная связь между фотоизмерительным устройством и источником света 9 (фиг.7), обеспечивающая возможность автоматической регулировки скважности импульсов источника света 7 до полной компенсации сигнала разбаланса ΔU=0.
В связи с тем, что фотострикционная пластинка может деформироваться также при изменении температуры окружающей среды, то для устранения указанного влияния в схему ВОД вводится вторая пластинка 5' с идентичным характеристиками, закрепленная на корпусе 4 или на штоке 6 в зависимости от крепления пластинки 5, являющейся оптически управляемым элементом. При этом пластины 5 и 5' имеют одинаковую ориентацию (см. фиг.9, 10). Таким образом, чувствительный элемент сопряжен со второй пластинкой, являющейся компенсирующим элементом, один конец которой установлен на штоке (фиг.9) или неподвижно относительно корпуса (фиг.10), установленной и ориентированной таким образом, чтобы обеспечить при изменении температуры возможность компенсации температурной деформации первой пластинки. Вторую пластинку 5' целесообразно покрывать светоотражающим покрытием, чтобы предотвратить влияние оптического излучения, управляющего первой пластинкой 5.
Роль фотострикционных пластинок оптически управляемого элемента 5 могут выполнять также биметаллические пластинки, покрытые слоем светопоглощающего материала для повышения эффективности поглощения и преобразования энергии света в энергию термоупругой деформации пластинки.
Предложенные способы измерения позволяют осуществлять дистанционный контроль исправности преобразователя перемещений в любой момент времени благодаря возможности реализации точно заданных эталонных деформаций преобразователя перемещений за счет фотоиндуцированных смещений пластинки и сравнения соответствующих выходных сигналов фотоизмерительного устройства с исходными градуировочными данными.
В предлагаемых ВОД идентичность характеристик датчиков достигается за счет того, что акцент в требованиях к параметрам основных узлов датчика переносится от оптоволоконного ЧЭ, являющегося нестандартным элементом, к более простым компонентам: к пластинке (например, биметаллической); световоду; к полупроводниковым источникам света; т.е. к стандартным, серийно производимым изделиям с гарантированными характеристиками.
Для подтверждения возможности реализации предложенных способов измерения были созданы макеты ВОД перемещений в соответствии с фиг.1, 4, в которых в качестве оптически управляемых элементов, использовались биметаллические пластинки, покрытые с одной стороны светопоглощающим материалом (сажей). Оптическое излучение, выходящее из изогнутого участка световода или подводимое с помощью дополнительного силового световода попадает на светопоглощающий слой и приводит к нагреву пластинки, в результате которого происходит ее деформация. Эксперименты по определению фотоиндуцированных смещений SФ(Р) были выполнены с использованием следующих серийных компонентов:
- биметаллической пластинки типа «алюминий-титан», производства ЗАО «Композит» (г.Калининград Московской обл.) с размерами 30×8×0,8 (мм),
- силового многомодового волоконного световода (GIF-625, THORLABS),
- полупроводникового лазера (L975P1WJ, THORLABS) с длиной волны излучения 975 нм.
Изменение тока накачки полупроводникового лазера в непрерывном режиме в пределах J=0÷A, а также в импульсном режиме с изменением скважности импульсов тока накачки в пределах Q=1÷100 при фиксированном значении тока в импульсе (Iи=1A) и длительности импульса Ти≈10-2 сек позволяет регулировать среднюю мощность излучения на выходе световода в пределах Р≈0÷0,5 Вт. В указанных пределах экспериментальная зависимость Sф(Р) является линейной Sф=α·Р с коэффициентом пропорциональности α≈4,5 мм/Вт. Расчеты показывают, что за счет оптимизации конструкции биметаллической пластинки ее эффективность может быть существенно повышена, так что при длине 1=30 мм коэффициент преобразования достигает значений α≈10÷15 мм/Вт, что позволяет использовать в рассматриваемых ВОД серийные, надежные и недорогие полупроводниковые излучатели с волоконным выходом, например, PL980P200, THORLABS, способных создавать фотоиндуцированные деформации до 3 мм.
Уровень техники.
1. А.Н. Пронин и др., «Контроль достоверности информации, поступающей от датчиков», журнал «Датчики и системы», 2008, №8, стр.58-63.
2. JP 2000298010.
3. RU 2322649.
4. US 5585961.
5. Сайт по фотострикции:
http://www.physics.montana.edu/eam/photostriction/index.htm.
6. RU 2401948.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРА, ВОЗДЕЙСТВИЕ КОТОРОГО НА ОПТИЧЕСКИЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ОБЕСПЕЧИВАЕТ ИЗМЕНЕНИЕ ИНТЕНСИВНОСТИ СВЕТА, И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2364838C2 |
| ИЗМЕРИТЕЛЬ ДЕФОРМАЦИИ И СПОСОБЫ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ (ВАРИАНТЫ) | 2006 |
|
RU2322649C1 |
| СРЕДСТВО ОПРЕДЕЛЕНИЯ НАПРЯЖЕНИЙ | 2006 |
|
RU2319941C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2142116C1 |
| Способ настройки максимальной чувствительности волоконно-оптического гидрофона | 2015 |
|
RU2610382C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2016 |
|
RU2630537C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ЭЛЕМЕНТА СООРУЖЕНИЯ | 2005 |
|
RU2290474C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2142117C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ТЕРМОМЕТР | 2004 |
|
RU2272259C1 |
| МУЛЬТИПЛЕКСНАЯ СИСТЕМА АВТОГЕНЕРАТОРНЫХ МИКРОРЕЗОНАТОРНЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2001 |
|
RU2204810C1 |

Изобретение относится к датчикам с воздействием на передающую способность оптического волокна. Датчик содержит корпус, внутри которого размещен оптоволоконный чувствительный элемент, способный изменять характеристики излучения, распространяющегося в световоде, в зависимости от деформации. Толкатель передает перемещение контролируемого объекта на чувствительный элемент и проходит через стенку корпуса или является стенкой корпуса. В датчике обеспечивается возможность объединенного воздействия на чувствительный элемент посредством толкателя и оптически управляемого элемента, способного деформироваться под действием падающего на него оптического излучения. Технический результат - обеспечение дистанционного контроля метрологической исправности датчика, расширение диапазона измерений, повышение эксплуатационных характеристик. 2 н. и 19 з.п. ф-лы, 10 ил.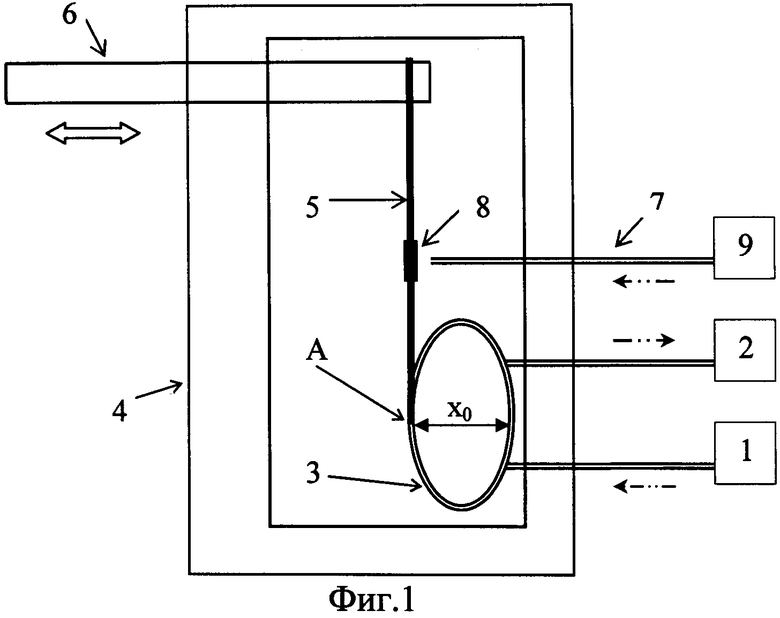
1. Волоконно-оптический датчик перемещений, содержащий:
корпус, внутри которого размещен, по меньшей мере, один чувствительный элемент, способный изменять, по меньшей мере, одну характеристику входного света от источника света в зависимости от деформации чувствительного элемента,
толкатель, обеспечивающий передачу перемещения контролируемого объекта на чувствительный элемент, при этом толкатель проходит через стенку корпуса или является стенкой корпуса,
при этом датчик имеет возможность соединения с устройством измерения, по меньшей мере, одной характеристики выходного света от чувствительного элемента,
отличающийся тем, что обеспечивается возможность объединенного воздействия на, по меньшей мере, один чувствительный элемент, посредством толкателя и, по меньшей мере, одного оптически управляемого элемента, способного деформироваться под действием падающего на него оптического излучения,
при этом, по меньшей мере, один оптически управляемый элемент закреплен одним концом на толкателе или на корпусе, а другой конец, по меньшей мере, одного оптически управляемого элемента имеет возможность воздействия на чувствительный элемент.
2. Датчик по п.1, отличающийся тем, что имеются: источник света, обеспечивающий излучение входного света в чувствительный элемент, и дополнительный источник света со световодом, передающим оптическое излучение от дополнительного источника света к оптически управляемому элементу.
3. Датчик по п.2, отличающийся тем, что дополнительный источник света является импульсным с регулируемой скважностью.
4. Датчик по п.1, отличающийся тем, что обеспечена передача оптического излучения, высвечивающегося из изогнутого участка чувствительного элемента, к светочувствительному участку поверхности оптически управляемого элемента.
5. Датчик по п.4, отличающийся тем, что источник света является импульсным с регулируемой скважностью.
6. Датчик по любому из пп.1-5, отличающийся тем, что оптически управляемый элемент является биметаллическим или фотострикционным, способным деформироваться под действием падающего на него оптического излучения.
7. Датчик по любому из пп.1-5, отличающийся тем, что чувствительный элемент сопряжен с компенсирующим элементом, обеспечивающим при изменении температуры окружающей среды компенсацию температурных деформаций оптически управляемого элемента.
8. Датчик по любому из пп.1-5, отличающийся тем, что обеспечена возможность уменьшения теплового оттока от оптически управляемого элемента посредством тепловой развязки между толкателем и концом оптически управляемого элемента.
9. Датчик по п.6, отличающийся тем, что обеспечена возможность уменьшения теплового оттока от оптически управляемого элемента посредством тепловой развязки между толкателем и концом оптически управляемого элемента.
10. Датчик по п.7, отличающийся тем, что обеспечена возможность уменьшения теплового оттока от оптически управляемого элемента посредством тепловой развязки между толкателем и концом оптически управляемого элемента.
11. Датчик по любому из пп.1-5, 9-10, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с толкателем, а другой конец имеет возможность воздействия на чувствительный элемент.
12. Датчик по п.6, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с толкателем, а другой конец имеет возможность воздействия на чувствительный элемент.
13. Датчик по п.7, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с толкателем, а другой конец имеет возможность воздействия на чувствительный элемент.
14. Датчик по п.8, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с толкателем, а другой конец имеет возможность воздействия на чувствительный элемент.
15. Датчик по любому из пп.1-5, 9-10, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с корпусом, а другой конец имеет возможность воздействия на чувствительный элемент.
16. Датчик по п.6, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с корпусом, а другой конец имеет возможность воздействия на чувствительный элемент.
17. Датчик по п.7, отличающийся тем, что оптически управляемый элемент является пластинкой, один конец которой связан с корпусом, а другой конец имеет возможность воздействия на чувствительный элемент.
18. Датчик по п.8, отличающийся тем, что деформируемый элемент является пластинкой, один конец которой связан с корпусом, а другой конец имеет возможность воздействия на чувствительный элемент.
19. Способ измерения перемещения, при котором посылают входной свет к, по меньшей мере, одному оптоволоконному чувствительному элементу, способному изменять, по меньшей мере, одну характеристику входного света от источника света в зависимости от воздействия на чувствительный элемент,
воздействуют на чувствительный элемент толкателем, обеспечивающим передачу перемещения контролируемого объекта, и
измеряют, по меньшей мере, одну характеристику выходного света от чувствительного элемента, в соответствии с которой определяют перемещение контролируемого объекта,
отличающийся тем, что обеспечивают возможность объединенного воздействия на, по меньшей мере, один чувствительный элемент, толкателя и, по меньшей мере, одного оптически управляемого элемента, реагирующего на изменение подводимой к нему оптической мощности.
20. Способ по п.19, отличающийся тем, что сначала без воздействия оптически управляемого элемента на чувствительный элемент определяют положение толкателя, при котором достигается максимальная чувствительность чувствительного элемента, а затем при объединенном воздействии толкателя и оптически управляемого элемента на чувствительный элемент измеряют перемещение контролируемого объекта в зоне максимальной чувствительности чувствительного элемента.
21. Способ по п.19 или 20, отличающийся тем, что при объединенном воздействии толкателя и оптически управляемого элемента на чувствительный элемент компенсация перемещения толкателя обеспечивается соответствующим фотоиндуцированным противоположным смещением оптически управляемого элемента.
| Машина для выгрузки квашеной капусты из дошников | 1958 |
|
SU117612A1 |
| Устройство для измерения малых перемещений | 1987 |
|
SU1460609A1 |
| Преобразователь перемещения в код | 1974 |
|
SU492904A1 |
| JPH 10111111 A, 28.04.1998 | |||
| CN 201034560 Y, 12.03.2008. | |||

