Изобретение относится к многоразовым космическим системам.
Известны подобные системы, см., например, «Битва за звезды», Первушин Антон, М., 2004, стр.203 или пат. RU 2087389. Их условно можно разделить на вертикально взлетающие и горизонтально взлетающие. И те и другие имеют свои преимущества и недостатки. Горизонтально взлетающие системы имеют те преимущества, что не требуют специального оборудования для старта, взлетают и приземляются на обычные аэродромы, не требуют мощных турбореактивных, двухконтурных или прямоточных воздушно-еактивных двигателей (далее ТРД, ДТРД и ПВРД) и от места изготовления до места старта могут долететь самостоятельно.
Все известные горизонтально взлетающие системы были построены по параллельной схеме, которая имеет существенный недостаток, - примерно вдвое повышенное аэродинамическое сопротивление на атмосферном участке полета из-за наличия в потоке двух параллельных фюзеляжей и интерференции между ними на сверхзвуковых скоростях. Или же горизонтально взлетающие системы были построены по контейнерной схеме, являющейся разновидностью параллельной, когда космическая часть системы (далее «вторая ступень») полностью или частично располагалась внутри раскрывающегося отсека атмосферного аппарата (далее «первая ступень»), что также, как и в параллельной схеме, повышает аэродинамическое сопротивление атмосферного аппарата, снижает его прочность и надежность, увеличивает его массу.
Невозможность применения на горизонтально взлетающей аэрокосмической системе гораздо более аэродинамически целесообразной продольной схемы объяснятся тем, что в процессе полета топливо расходуется только из первой ступени аэрокосмической системы, и поэтому при применении последовательной схемы аэрокосмической системы, когда вторая ступень находится впереди и в миделе первой ступени, центровка нарушилась бы настолько, что аэродинамическое управление аппаратом на атмосферном участке полета стало бы невозможным или стало бы невозможным управление первой и второй ступенью порознь на спускаемом участке траектории.
Задача и технический результат изобретения - использование преимуществ аэрокосмической системы горизонтального взлета продольной компоновки и устранение ее недостатков, то есть возможность аэродинамического управления всей системой на взлете и управление порознь обеими ступенями при их посадке на землю. Конечный результат - больший процент выводимой на орбиту массы от стартовой массы всей системы.
ВАРИАНТ 1. Данная аэрокосмическая система содержит первую и вторую ступень, имеющие крылья, и имеет воздушно-реактивные (ТРД, ДТРД, ПВРД) двигатели на первой ступени, причем первая и вторая ступени соединены последовательно, то есть фюзеляж второй ступени находится в миделе первой ступени.
Как указывалась выше, это позволит минимизировать аэродинамическое сопротивление, позволит придать второй ступени гиперзвуковую скорость и вывести ее на большую высоту прежде, чем произойдет разделение ступеней.
ВАРИАНТ 2. Но, чтобы иметь возможность устойчивого полета и аэродинамического управления на атмосферном участке полета, данная система имеет на первой ступени крыло изменяемой стреловидности. Это позволит изменять в широких пределах положение аэродинамического фокуса всей системы по мере расходования топлива из первой ступени.
Причем следует иметь ввиду, что центр масс системы по мере расходования топлива из первой ступени сдвигается вперед. Поэтому для сохранения допустимого диапазона центровок и для оптимизации аэродинамического качества на взлетном и гиперзвуковом режимах полета желательно применить крыло обратной стреловидности. Точнее - крыло на взлетном режиме, когда баки первой ступени еще полные, должно быть прямым или иметь небольшую прямую стреловидность, а на гиперзвуковом режиме, когда центр масс значительно сместился вперед, крыло должно иметь обратную стреловидность (современные материалы позволяют достичь нужной прочности и жесткости). Если попытаться на больших скоростях увеличить прямую стреловидность крыла, то аэродинамический фокус, наоборот, сместится назад и аэродинамическое управление системой станет невозможным.
Хотя возможен вариант, когда крыло на взлетном режиме имеет большую прямую стреловидность, то есть заднее расположение аэродинамического фокуса, а на больших скоростях будет иметь меньшую прямую стреловидность или даже иметь прямую переднюю кромку. Это увеличит скорость отрыва и возможно потребует применения предкрылков, но при применении соответствующих сверхзвуковых аэродинамических профилей крыла (малой относительной толщины с острой передней кромкой) это позволит достичь большего потолка, нежели со стреловидным крылом прямой стреловидности или с треугольным крылом.
Следует отметить, то крыло изменяемой стреловидности хорошо известно в авиации и применяется для снижения аэродинамического сопротивления на трансзвуковых и сверхзвуковых скоростях и смещение аэродинамического фокуса там считается вредным явлением. Однако те же самые технические решения могут обеспечить в данном случае другой технический результат - обеспечение продольной устойчивости при значительном изменении центровки летательного аппарата. Причем, согласно Регламенту п.24.5.3.2.(последний абзац), а именно «Изобретение признается… если… совпадающие решения выявлены, но не подтверждена известность влияния этих отличительных признаков на указанный заявителем технический результат” это решение патентоспособно. Технический результат в данном случае совершенно другой, впервые указанный заявителем.
ВАРИАНТ 3. Если изменения аэродинамического фокуса первой ступни окажется недостаточно, то крыло изменяемой стреловидности следует применить и на второй ступени. То есть данная система будет иметь крыло изменяемой стреловидности на обеих ступенях. Это позволит регулировать положение аэродинамического фокуса в более широких пределах.
Необходимо заметить, что применение крыла переменной стреловидности несколько усложняет и утяжеляет конструкцию, поэтому его не следует использовать без настоятельной необходимости.
ВАРИАНТ 4. На всех существующих аэрокосмических системах использовались треугольные крылья большого удлинения с элевонами. Но управление с помощью элевонов недостаточно эффективно в режиме посадки (например, на «Буране» имеется балансировочный щиток) и отрицательно сказывается на подъемной силе крыла. То есть желательно применить отдельные рули высоты, например традиционное ЗГО (заднее горизонтальное оперение). При этом ЗГО второй ступени оказывается при полностью заправленной и при полностью пустой первой ступени по разные стороны от центра масс. Можно было бы просто зафиксировать это ЗГО в оптимальном положении, но при этом ухудшится управление по тангажу. Поэтому в данном варианте системы на первой и второй ступенях имеется заднее горизонтальное оперение, причем оперение второй ступени работает как «утка», когда центр масс находится позади него, как заднее - когда центр масс становится впереди него, и занимает положение с оптимальным углом атаки, когда центр масс совпадает с ним.
ВАРИАНТ 5. В этом варианте системы также на первой и второй ступенях имеется заднее горизонтальное оперение. Это оперение обеспечивает обеим ступеням хорошую маневренность по тангажу и большую подъемную силу в режиме посадки. Однако управление всей системой, которая в аэродинамическом смысле является неравновеликим тандемом, вполне эффективно и без ЗГО первой и второй ступеней, которые в этом режиме являются балластом. Управление тандемом, как известно, достаточно эффективно осуществляется перераспределением подъемной силы между передним и задним крыльями с помощью элевонов, которые теперь правильнее назвать закрылками или флаперонами. Чтобы можно было полезно использовать ЗГО обеих ступеней и в этом режиме, все четыре горизонтальные аэродинамические поверхности (два крыла и два ЗГО) имеют положительный угол атаки и создают подъемную силу. Это позволит достичь значительно большего потолка, чем при традиционном использовании ЗГО, когда оно создает отрицательную подъемную силу и, фактически, мешает крылу. И, следовательно, это позволит второй ступени вывести больший груз в околоземное пространство.
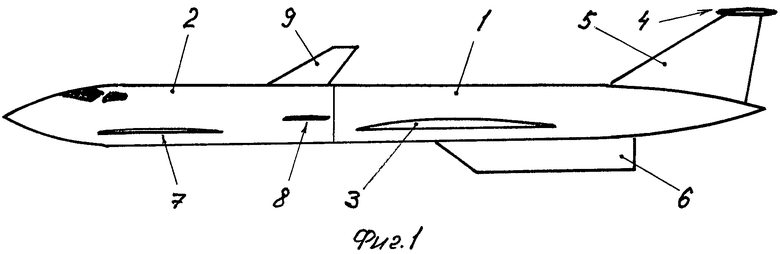
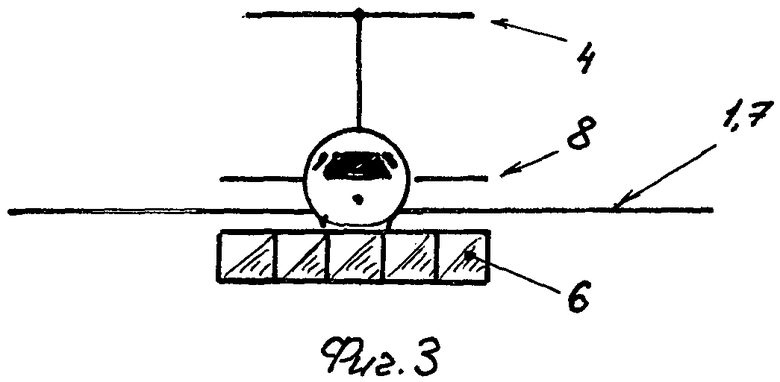
На фиг.1, 2, 3 показана двухступенчатая аэрокосмическая система, состоящая из первой ступени 1 и второй ступени 2. Первая ступень имеет крыло изменяемой стреловидности 3 (пунктиром показано их взлетное положение), ЗГО 4, киль 5 и пять двухконтурных турбореактивных двигателей 6. Вторая ступень имеет крыло изменяемой стреловидности 7, ЗГО 8, киль 9 и расположенный на стыке ступеней жидкостный ракетный двигатель (не показан). При этом нос первой ступени входит в реактивное сопло ракетного двигателя второй ступени (оно будет работать преимущественно в полном вакууме и поэтому его выходное сечение будет почти равным миделю второй ступени). Обе ступени также имеют колесное шасси (находится в убранном положении, и потому не показано).
Работает система так: с помощью ДТРД 6 первой ступени 1 система взлетает с любого достаточно качественного и длинного аэродрома. Крылья изменяемой стреловидности 3, 7 при этом находятся в заднем положении (все направления даны относительно направления полета). Закрылки и предкрылки, если они есть, выпущены во взлетное положение. Все четыре аэродинамические поверхности 3, 4, 7, 8 имеют положительный угол атаки и создают подъемную силу. Управляется система по тангажу путем перераспределения подъемной силы, в основном, на ЗГО первой ступени 4 и на крыле второй ступени 7 (они максимально разнесены по длине системы). По мере расходования топлива из первой ступени и увеличения высоты и скорости полета крылья переводятся во все более переднее положение, достигнув максимального угла обратной стреловидности на расчетной высоте и скорости. Достигнув потолка, система разделяется. Перед разделением необходимо достаточно быстро придать крыльям взлетное положение, иначе может произойти потеря продольной устойчивости полета одной или обеих ступеней. Первая ступень будет иметь сравнительно тупую переднюю оконечность (острая ей не нужна), и поэтому быстро тормозится до дозвуковой скорости. Четыре двигателя из шести глушатся, а на одном двигателе, работающем на малых оборотах, первая ступень совершает посадку на ближайшем аэродроме или планирует с выключенными двигателями.
Вторая ступень 2 сначала включает ракетный двигатель на 15-20% тяги, чтобы не повредить первую ступень, а потом включает двигатель на расчетную тягу и выходит в безвоздушное пространство.
Выполнив программу, вторая ступень тормозится в атмосфере и совершает посадку на аэродром.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| ГИДРОСАМОЛЕТ С ЭКРАННЫМ ЭФФЕКТОМ | 2012 |
|
RU2532658C2 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СО СМЕШАННЫМ РЕЖИМОМ АЭРОДИНАМИЧЕСКОГО И КОСМИЧЕСКОГО ПОЛЕТА И СПОСОБ ЕГО ПИЛОТИРОВАНИЯ | 2007 |
|
RU2441815C2 |
| СВЕРХЗВУКОВОЙ САМОЛЕТ С КРЫЛЬЯМИ ЗАМКНУТОЙ КОНСТРУКЦИИ | 2015 |
|
RU2591102C1 |
| СВЕРХЗВУКОВОЙ КОНВЕРТИРУЕМЫЙ САМОЛЕТ | 2009 |
|
RU2432299C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2012 |
|
RU2486105C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА САМОЛЕТА | 1994 |
|
RU2090445C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
Изобретение относится к многоразовым космическим системам и касается аэрокосмической системы горизонтального взлета продольной компановки. Двухступенчатая аэрокосмическая система содержит первую и вторую ступень с крыльями, воздушно-реактивные двигатели на первой ступени. Первая и вторая ступени соединены последовательно. Фюзеляж второй ступени находится в миделе первой ступени. Крыло на первой ступени или на обеих ступенях изменяемой стреловидности. На первой и второй ступенях может быть расположено заднее горизонтальное оперение (ЗГО). Причем оперение второй ступени работает как «утка», когда центр масс находится позади него, и как заднее, когда центр масс становится впереди него, и занимает положение с оптимальным углом атаки, когда центр масс совпадает с ним. Все ЗГО и крылья имеют положительный угол атаки и создают подъемную силу. Достигается возможность аэродинамического управления всей системой на взлете, управление порознь обеими ступенями при посадке на землю, увеличение процента выводимой на орбиту массы от стартовой массы всей системы. 3 н. и 1 з.п. ф-лы, 3 ил. 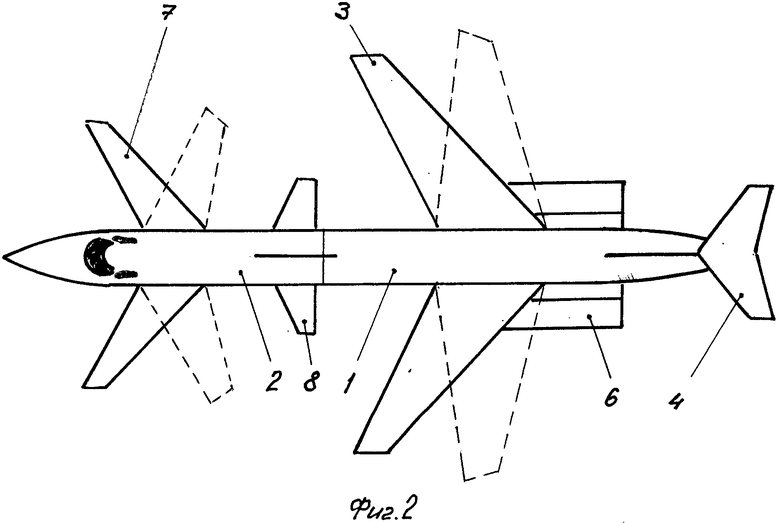
1. Двухступенчатая аэрокосмическая система, содержащая первую и вторую ступень с крыльями и имеющая воздушно-реактивные двигатели на первой ступени, причем первая и вторая ступени соединены последовательно, и фюзеляж второй ступени находится в миделе первой ступени, отличающаяся тем, что имеет на первой ступени или на обеих ступенях крыло изменяемой стреловидности.
2. Система по п.1, отличающаяся тем, что крыло/крылья имеет изменяемую обратную стреловидность.
3. Двухступенчатая аэрокосмическая система, содержащая первую и вторую ступень, имеющие крылья и воздушно-реактивные двигатели на первой ступени, отличающаяся тем, что на первой и второй ступенях имеется заднее горизонтальное оперение, причем оперение второй ступени работает как «утка», когда центр масс находится позади него, как заднее, когда центр масс становится впереди него, и занимает положение с оптимальным углом атаки, когда центр масс совпадает с ним.
4. Двухступенчатая аэрокосмическая система, содержащая первую и вторую ступень, имеющие крылья и воздушно-реактивные двигатели на первой ступени, отличающаяся тем, что на первой и второй ступенях имеется заднее горизонтальное оперение, причем все ЗГО и крылья имеют положительный угол атаки и создают подъемную силу.
| "Летательный аппарат "Звездный мир Тарана" | 1991 |
|
SU1837039A1 |
| US 4802639 A, 07.02.1989 | |||
| МНОГОРЕЖИМНЫЙ САМОЛЕТ-РАЗГОНЩИК АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 1999 |
|
RU2175934C2 |
| Гидравлический привод к топливному насосу для безвольного дизель компрессора | 1949 |
|
SU84479A1 |
| СИСТЕМА ЗАПУСКА И ТРАНСПОРТИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 1999 |
|
RU2233772C2 |
| WO 03086860 A1, 23.10.2003 | |||

