Изобретение относится к области контрольно-измерительной техники и может быть использовано для бесконтактного измерения частоты вращения валов двигателей в условиях широкого изменения рабочих температур.
Известен индукционный датчик скорости вращения, содержащий зубчатое колесо из ферромагнитного материала, постоянный магнит, две магнитные системы, образованные сердечниками и обмотками, магнитодиод, приклеенный к торцу магнитопровода и источник питания [1].
Наиболее близким к предлагаемому изобретению по технической сущности является магнитоиндукционный датчик частоты вращения, содержащий постоянный магнит, обмотку с сердечником, индуктор-модулятор на валу, немагнитную вставку между полюсом магнита и торцом сердечника [2].
Недостатками известных индукционных датчиков является недостаточная чувствительность преобразования и точность измерения частоты вращения, сравнительно большие габаритно-массовые параметры.
Предлагаемый датчик частоты вращения позволит значительно повысить чувствительность преобразования и точность измерения частоты вращения, уменьшить габаритно-массовые параметры.
Поставленная цель достигается тем, что в индукционном датчике частоты вращения, содержащем постоянный магнит, обмотку с сердечником, индуктор-модулятор на валу, согласно предлагаемому изобретению сердечник выполнен в виде усеченного конуса с гиперболической образующей, основание которого обращено к торцу магнита, при этом обмотка выполнена в виде двух гальванически развязанных секций, причем основная часть витков секций обмотки размещена в зоне вершины сердечника с диаметром D1=(0,15÷0,20)D основания постоянного магнита, а геометрические размеры постоянного магнита выбраны из условия:
l/D=(3÷4),
где l - длина постоянного магнита;
D - диаметр основания постоянного магнита.
Повышение чувствительности преобразования достигается за счет формирования узконаправленного магнитного потока, собранного со всей площади поперечного сечения постоянного магнита с помощью конусообразного сердечника с гиперболической образующей, и размещения основной части витков секций обмотки в зоне близкой к торцевой стенке корпуса датчика, через которую проходит магнитный поток. Причем витки секций обмотки оказывают незначительное влияние на импульсные выходные сигналы.
Точность измерения частоты вращения повышается за счет того, что на секциях обмотки формируется импульсные сигналы при прохождении мимо торца датчика каждого «выступа» - «впадины» индуктора-модулятора.
Уменьшения габаритно-массовых параметров осуществляется за счет размещения обмотки на конусообразном сердечнике с гиперболической образующей без применения каркаса для намотки секций обмотки и малого диаметра основания постоянного магнита.
На фиг.1 изображен индукционный датчик частоты вращения, содержащий индуктор-модулятор 1 из ферромагнитного материала, постоянный магнит 2, конусообразный сердечник 3 с гиперболической образующей из ферромагнитного материала, основание которого обращено к торцу магнита 2, обмотку 4, выполненную в виде двух гальванически развязанных секций на конусообразном сердечнике 3, корпус 5 из диамагнитного материала.
Индукционный датчик частоты вращения работает следующим образом. Магнитный поток Фм, создаваемый постоянным магнитом 2, проходит через конусообразный сердечник 3, формирующий узконаправленный поток Фк, который проходит через торец диамагнитного корпуса 5 в окружающую среду между торцом датчика и индуктором-модулятором 1.
При вращении индуктора-модулятора 1, закрепленного на объекте контроля, изменяется величина магнитного потока Фк, вследствие изменения сопротивления магнитному потоку при прохождении мимо торца датчика «впадин» или «выступов» индуктора-модулятора 1.
Согласно закону электромагнитной индукции, в секциях обмотки 4 наводятся импульсы ЭДС, частота следования которых пропорциональна скорости вращения индуктора-модулятора 1.
При прохождении мимо торца датчика одного выступа и одной впадины индуктора-модулятора 1 в каждой из секций обмотки 4 наводится один импульс ЭДС (е), амплитуда которого определяется выражением:

где W - число витков обмотки 4, величина постоянная для выбранной конструкции датчика;
dФк/dt - скорость изменения магнитного потока Фк.
Таким образом, за один оборот индуктора-модулятора 1 в каждой из секций обмотки 4 формируется число импульсов равное количеству «выступов» и «впадин» на индукторе-модуляторе 1.
Из выражения (1) видно, что чем больше будет исходный узконаправленный магнитный поток Фк с вершины сердечника 3 (концентратора магнитного потока), тем большее изменение dФк от «впадин» и «выступов» индуктора-модулятора 1, что приводит к увеличению амплитуды наводимой ЭДС в секциях обмотки 4.
Кроме того, величина производной dФк/dt зависит также от линейной скорости перемещения «впадин» и «выступов» индуктора-модулятора 1 относительно торца датчика частоты вращения, т.е. чем больше диаметр D1 индуктора-модулятора 1, тем больше линейная скорость, а, следовательно, более низкую частоту вращения можно измерять одним и тем же датчиком или при одной и той же частоте вращения индуктора-модулятора 1, с увеличением диаметра D1, увеличивается амплитуда выходных сигналов (е) с выходов секций обмотки 4 датчика. С выходов секций обмотки 4 регистрируется информация в виде импульсов ЭДС о частоте вращения индуктора-модулятора 1 объекта контроля по двум независимым каналам, т.к. в секциях обмотки 4 наводятся одинаковые ЭДС.
Повышение чувствительности преобразования достигается за счет преобразования энергии постоянного магнита 2 в ЭДС (выходные сигналы датчика), которая повышается вследствие формирования узконаправленного магнитного потока Фк, собранного со всей площади поперечного сечения постоянного магнита 2 с помощью конусообразного сердечника 3 (концентратора магнитного потока) с гиперболической образующей и размещения основной части витков секций обмотки 4 в зоне близкой к торцевой стенке корпуса 5 датчика, через которую проходит магнитный поток Фк=Фм, взаимодействующий с «впадинами» и «выступами» индуктора-модулятора 1, т.к. витки секций обмотки 4, удаленные от торцевой стенки корпуса 5 датчика, оказывают незначительное влияние на импульсные выходные сигналы (е).
Выбор оптимальных геометрических размеров постоянного магнита 2 l/D=(3÷4) обеспечивает формирование максимального значения магнитного потока Фм в поперечном сечении постоянного магнита 2 и увеличивает магнитный поток Фк, который взаимодействует с индуктором-модулятором 1, что также приводит к повышению чувствительности преобразования датчика.
При соединении двух секций обмотки 4 последовательно согласно амплитуда выходного сигнала (е) датчика увеличивается в 2 раза, т.к. в рабочем режиме в этих секциях обмотки 4 наводятся одинаковые ЭДС, которые суммируются при последовательно согласном соединении обмотки 4.
В датчике-прототипе значительная часть магнитного потока со всего поперечного сечения постоянного магнита замыкается с полюса "N" на полюс "S" и не взаимодействует с «выступами» и «впадинами» индуктора-модулятора, и этот магнитный поток Фsп, создаваемый на площади сечения постоянного магнита наиболее удаленной от оси постоянного магнита не используется в формировании ЭДС выходного сигнала на секциях сигнальной обмотки, а следовательно, чувствительность преобразования у датчика-прототипа значительно меньше, чем у предлагаемого индукционного датчика частоты вращения. В предлагаемом датчике в формировании выходного сигнала используется полностью магнитный поток Фм=Фк, создаваемый постоянным магнитом.
Повышение точности измерения частоты вращения осуществляется вследствие того, что на секциях обмотки 4 предлагаемого датчика формируются импульсные сигналы (е) при прохождении мимо торца датчика каждого «выступа» - «впадины» индуктора-модулятора 1, т.е. точность измерения частоты вращения а за один оборот индуктора-модулятора 1 определяется величиной:
α=360°/Z,
где Z - число "выступов" - "впадин".
В датчике-прототипе точность измерения частоты вращения за один оборот индуктора-модулятора определяется величиной:
α=360°/Z-Zsп,
где Zsп - число «выступов» - «впадин», взаимодействующих одновременно с магнитным потоком Фsп постоянного магнита.
Кроме того, число «выступов» - «впадин», взаимодействующих одновременно с магнитным потоком Фsn, в датчике-прототипе зависит от конфигурации этого магнитного потока и от зазора δ между торцом датчика и «выступами» индуктора-модулятора 1.
Поэтому точность измерения частоты вращения у предлагаемого датчика значительно выше, чем у датчика-прототипа.
Уменьшение габаритно-массовых параметров достигается за счет размещения секций обмотки 4 на конусообразном сердечнике с гиперболической образующей без применения каркаса для намотки секций обмотки 4 и малого диаметра D основания постоянного магнита 2, значение которого выбирается в пределах D=(6…8 мм), а длина постоянного магнита 2 равна l=(3÷4)D основания. Гиперболическая образующая конуса обеспечивает плавный переход магнитного потока от основания к вершине конусообразного сердечника 3.
Техническим результатом предлагаемого индукционного датчика частоты вращения является повышение чувствительности преобразования и точности измерения частоты вращения, а также уменьшение габаритно-массовых параметров.
Источники информации
1. А.С. №634209, G01R 3/48, Датчик скорости вращения, опубл.: 25.11.78 г., БИ №43.
2. RU патент №2097769, G01R 3/48, Магнитоиндукционный датчик частоты вращения, опубл.: 27.11.1997 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| ТАХОМЕТР ЧАСТОТНЫЙ ЯЛОВЕГИ | 2004 |
|
RU2258228C1 |
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1995 |
|
RU2097769C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1994 |
|
RU2122742C1 |
| ОДНОФАЗНЫЙ ГЕНЕРАТОР С КОЛЬЦЕВОЙ ЯКОРНОЙ ОБМОТКОЙ | 2012 |
|
RU2513986C1 |
| УНИВЕРСАЛЬНАЯ КОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2465707C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| МНОГОВИТКОВЫЙ БЕСКОНТАКТНЫЙ УНИПОЛЯРНЫЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 2007 |
|
RU2351055C1 |
Изобретение относится к области контрольно-измерительной техники и может быть использовано для бесконтактного измерения частоты вращения валов двигателей в условиях широкого изменения рабочих температур. Технический результат заключается в повышении чувствительности преобразования, точности измерения частоты вращения и уменьшении габаритно-массовых параметров. Технический результат достигается благодаря тому, что индукционный датчик частоты вращения содержит индуктор-модулятор 1 из ферромагнитного материала, постоянный магнит 2, сердечник 3 с гиперболической образующей из ферромагнитного материала, выполненный в виде усеченного конуса, основание которого обращено к торцу магнита 2, обмотку 4 из двух секций, выполненную в виде двух гальванически развязанных секций на сердечнике 3, корпус 5 из диамагнитного материала. 1 ил.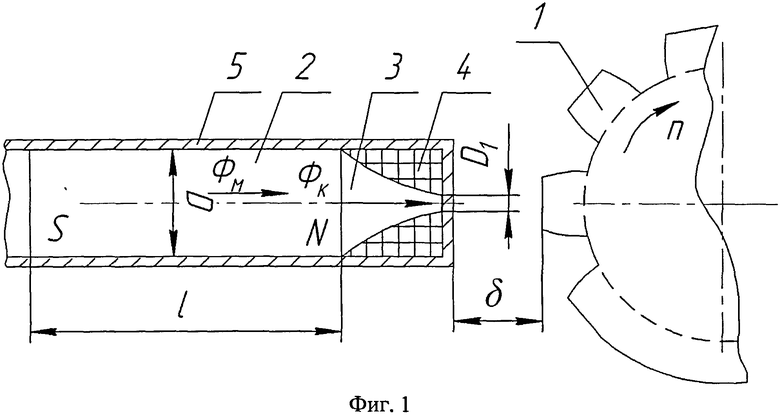
Индукционный датчик частоты вращения, содержащий постоянный магнит, обмотку с сердечником, индуктор-модулятор на валу, отличающийся тем, что сердечник выполнен в виде усеченного конуса с гиперболической образующей, основание которого обращено к торцу магнита, при этом обмотка выполнена в виде двух гальванически развязанных секций, причем основная часть витков секций обмотки размещена в зоне вершины сердечника с диаметром D1=(0,15÷0,20)D основания постоянного магнита, а геометрические размеры постоянного магнита выбраны из условия:
l/D=(3÷4),
где l - длина постоянного магнита;
D - диаметр основания постоянного магнита.
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1995 |
|
RU2097769C1 |
| WO 1984004971 А1, 20.12.1984 | |||
| RU 94041257 А1, 27.09.1996 | |||
| US 0006771063 В2, 03.08.2004 | |||
| СПОСОБ УПАКОВКИ УСТОЙЧИВЫХ ПРИ ХРАНЕНИИ НЕНАСЫЩЕННЫХ ОКСИДОМ УГЛЕРОДА ЖИДКИХ ПИЩЕВЫХ ПРОДУКТОВ И КАРТОННЫЙ КОНТЕЙНЕР | 1989 |
|
RU2015081C1 |

