Изобретение относится к области автоматики и измерительной техники и может быть использовано для бесконтактного измерения частоты вращения вращающихся объектов, преимущественно в главных циркуляционных насосных агрегатах (ГЦНА) на атомных электростанциях.
Известен индукционный таходатчик (см. Датчики: Справочное пособие / Под общ. ред. В.М. Шарапова, Е.С. Полищука, Москва: Техносфера, 2012, - с. 217), принцип действия которого основан на изменении магнитного сопротивления цепи. Датчик имеет измерительную обмотку, размещенную на стальном стержне, через который замыкается магнитный поток постоянного магнита. Подвижной частью является ферромагнитный зубчатый диск, который крепится к валу, обороты которого измеряют. При вращении вала зубчатые выступы диска (индуктора) уменьшают возможный промежуток между подвижным ферромагнитным диском и неподвижными частями магнитопровода, что приводит к изменению магнитного потока и наведению в измерительной обмотке электродвижущей силы (ЭДС), пропорциональной скорости изменения магнитного сопротивления.
По техническому уровню известны и широко применяются датчики с переменным магнитным сопротивлением, где измерительная катушка снабжается магнитным сердечником, на который воздействует поток индукции постоянного магнита. Катушка помещена перед диском (полюсное колесо) или перед вращающимся ферромагнитным телом. Последовательность скачков магнитных свойств (зубья, щели, отверстия) диска или вращающегося тела вызывает периодическое изменение магнитного сопротивления в магнитной цепи катушки, которое наводит в ней ЭДС с частотой, пропорциональной скорости вращения. Амплитуда этой ЭДС также зависит от расстояния между катушкой и вращающимся телом и от скорости вращения. Диапазон измерений зависит от числа скачкообразных изменений магнитных свойств вращающего тела, например от числа зубьев колеса. Типичные диапазоны измерений составляют от 50 до 500 об/мин для колеса с 60 зубьями и от 500 до 1000 об/мин с 15 зубьями.
Известен индукционный датчик скорости вращения (Патент SU №634209 A1, G01P 3/48, опубл. 25.11.1978), содержащий зубчатое колесо из ферромагнитного материала, постоянный магнит, две магнитные системы, образованные сердечниками и обмотками, магнитодиод, приклеенный к торцу магнитопровода и источник питания.
Известен магнитоиндукционный датчик частоты вращения (Патент RU №2097769 C1, G01P 3/48, опубл. 27.11.1997), содержащий постоянный магнит, обмотку с сердечником, индуктор-модулятор на валу, немагнитную вставку между полюсом магнита и торцом сердечника.
Недостатками известных датчиков являются недостаточная чувствительность преобразования и точность измерения частоты вращения.
Известен комплекс тахометрический ИЦФР.402141.004 (для АЭС) производства ФГУП "РФЯЦ - ВНИИЭФ" г. Саров (URL: http://www.vniief.ru/wps/wcm/connect/vniief/site/researchdirections/civildevelopment/products/TEC/controlapps/razr/ddbad9804985eecbab56abd73e2393e8 (дата обращения: 26.02.2015)), предназначенный для измерения частоты вращения главных циркуляционных насосов (ГЦН) с зубчатыми ферромагнитными колесами на валу и в состав которого входит также зубчатый модулятор и датчик частоты вращения ИЦФР.408113.030. Датчик частоты вращения включает индуктор, усилитель-формирователь, жгут и жгут питания, причем в корпусе индуктора, выполненного из немагнитного материала, расположена катушка с обмоткой и сердечником из магнитотвердого материала. Преобразование частоты вращения вала с зубчатым колесом из ферромагнитного материала в пропорциональную последовательность токовых импульсов осуществляется индуктором, который устанавливается с определенным зазором относительно зубчатого колеса контролируемого вала и крепится к кронштейну или корпусу контролируемого объекта. Наведенная в обмотке индуктора переменная ЭДС преобразуется в усилителе-формирователе в последовательность прямоугольных импульсов тока, где частота выходных импульсов пропорциональна частоте вращения контролируемого вала. В состав усилителя-формирователя входят компаратор и формирователь импульсов тока, которые преобразуют импульсы напряжения индуктора в выходной сигнал - импульсы тока амплитудой (17±3) мА на каждое пересечение зубьями зубчатого колеса магнитного поля индуктора. Усилитель-формирователь выполнен по двухпроводной линии связи на установленной в корпусе печатной плате с электрорадиоизделиями. Подключение к усилителю-формирователю индуктора осуществляется кабельными линиями связи посредством соединителей типа РМД. Комплекс тахометрический обеспечивает измерение частоты вращения валов с зубчатым колесом (модулятором) со следующими параметрами: число зубьев - 60 шт., величина зазора между индуктором и зубом зубчатого колеса - от 1 до 3 мм. Диапазон контролируемых частот вращения составляет от 10 до 1500 об/мин. Диапазон преобразуемых частот при числе зубьев <60 - от 10 до 10000 об/мин.
Недостатками устройств с переменным магнитным сопротивлением, и в частности известного датчика частоты вращения, являются узкие функциональные возможности их использования. При малых скоростях амплитуда ЭДС может быть недостаточной для обнаружения, вследствие чего появляется «мертвая зона», в которой невозможны никакие измерения, и к тому же амплитуда ЭДС быстро падает с увеличением зазора между катушкой и вращающимся телом. Кроме этого при работе ГЦНА трудно выдержать зазор в 3 мм из-за биения вала, т.к. допускаемая амплитуда биения 3÷5 мм. Причем радиационный фон и вибрации оказывают разрушающее воздействие на постоянные магниты, а в общеизвестных бесконтактных индуктивных измерительных устройствах зубчатое колесо/диск изготовлены в основном из ферромагнитных материалов.
Из уровня техники известен источник информации (Патент US 4156192(A)-1979-05-22), раскрывающий систему бесконтактного измерения частоты вращения, содержащую объект измерения (диск), индуктивные датчики, электронный модуль и соединительные кабели. При этом каждый индуктивный датчик выполнен в виде двух катушек индуктивности, прикрепленных параллельно друг другу на корпусе контролируемого объекта с возможностью прохождения объектом измерения между катушками индуктивности при вращении вала. Диск соединен с объектом перемещения. Вышеуказанная система является наиболее близкой по отношению к заявленной в независимом пункте 1 формулы изобретения.
Недостаток известной системы заключается в невозможности обеспечения надлежащей точности измерения количества оборотов вала (например, ГЦНА) при малых скоростях вращения и в условиях работы с помехами, в частности, от электромагнитного поля, возникающего при работе электродвигателя ГЦНА от частотного преобразователя, которым укомплектован ГЦНА. Воздействию помех будут подвержены сигналы с индуктивного датчика, что не позволит выделить смодулированный выходной сигнал для обработки. Причем выходной сигнал зависит также от зазора между подвижным диском и неподвижными катушками индуктивности из-за радиальных и торцевых биений вала двигателя, который в известной системе недостаточен. Кроме того, торцевое крепление диска с валом конструктивно невозможно в случае одновального ГЦНА, так как единственно возможным местом размещения диска может быть только боковая поверхность самого вала.
Задачей, положенной в основу изобретения, является повышение точности измерения частоты вращения вращающегося объекта в условиях радиационной опасности.
Для решения поставленной задачи предложена система бесконтактного измерения частоты вращения, включающая лопастной диск, индуктивные датчики в количестве как минимум четырех, равномерно расположенные по окружности на контролируемом объекте, электронный модуль и соединительные экранированные кабели с разъемами. Причем каждый индуктивный датчик содержит по две катушки индуктивности К1 и К2, прикрепленные к соответствующему кронштейну параллельно друг другу.
Кронштейны закреплены на корпусе контролируемого объекта и установлены к боковой поверхности лопастного диска так, чтобы тот находился в зоне индуктивных датчиков, а сами кронштейны неподвижны относительно лопастного диска. Сердечники катушек К1 и К2 обращены навстречу друг другу. Оси сердечников расположены перпендикулярно плоскости лопастного диска (его радиусу). Подвижной частью (модулятором) является изготовленный из магнитной углеродистой стали и насаженный на вал двигателя с возможностью прохода в середине воздушного зазора между катушками индуктивности К1 и К2 лопастной диск. С учетом допустимой амплитуды биения вала двигателя 3÷5 мм конструктивно обеспечены постоянные воздушные зазоры между внешней поверхностью лопастей диска и катушками индуктивности, по крайней мере, не менее 5 мм. При этом каждая катушка индуктивности выполнена в герметичном корпусе с применением радиационно стойких материалов, в частности медной проволоки для обмотки и силиконового компаунда для заполнения пустот. Корпуса индуктивных катушек оснащены разъемами для подключения соединительных экранированных кабелей к электронному модулю.
Взаимное расположение индуктивных датчиков с лопастным диском и их конструктивное исполнение обеспечивают устойчивый уровень огибающего или индуцированного сигнала в диапазоне частот 1÷300 Гц.
Технический результат заключается в повышении чувствительности системы бесконтактного измерения частоты вращения за счет исключения «мертвых зон» при применении как минимум четырех индуктивных датчиков и наличия достаточного количества сочетаний «лопасть - впадина» для прерывания магнитного поля на лопастном диске, т.к. количество индуктивных датчиков и количество впадин влияют на точность измерения оборотов при малых скоростях вращения.
При использовании настоящего изобретения также достигаются следующие технические результаты:
- повышение эксплуатационной надежности;
- расширение технологических возможностей;
- возможность применения при технологических погрешностях изготовления ГЦНА;
- возможность применения при допустимых радиальных и торцевых биениях вала ГЦНА.
Изобретение поясняется следующими чертежами, представленными на фиг. 1-5.
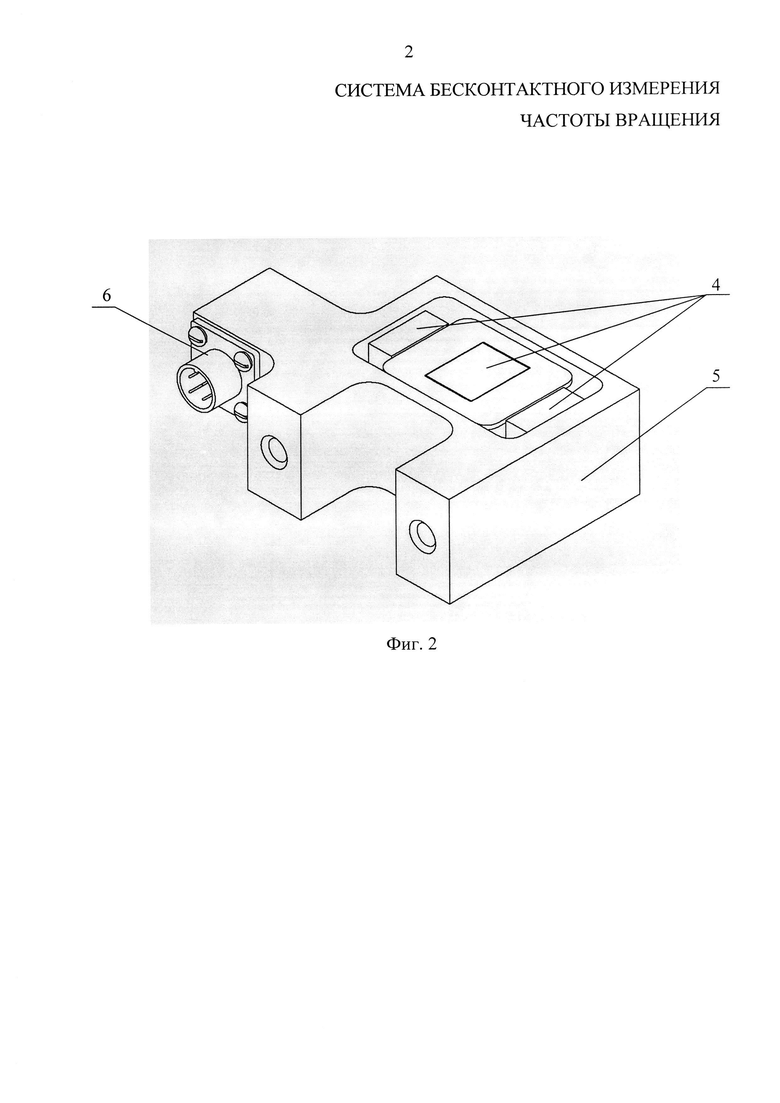
На фиг. 1 показан общий вид индуктивного датчика.
На фиг. 2 показан общий вид катушки индуктивности.
На фиг. 3 показано взаимное расположение индуктивного датчика с лопастным диском.
На фиг. 4 изображена структурная схема индуктивного датчика.
На фиг. 5 представлены циклограммы работы системы.
Система бесконтактного измерения частоты вращения включает индуктивный датчик 1 (фиг. 1 и 3) в количестве четырех, лопастной диск 2 (фиг. 3), электронный модуль (не показан) и соединительные экранированные кабели (не показаны) с разъемами.
Каждый индуктивный датчик 1 (фиг. 1) трансформаторного типа содержит выполненные из радиационно стойких материалов две катушки индуктивности К1 и К2 и кронштейн 3. Каждая катушка (фиг. 2) с ферритовым ш-образным сердечником 4 и измерительной обмоткой из медного провода уложена в углубление отдельного корпуса 5. Выводы у каждой катушки прикреплены к розетке 6 соответствующей вилки (типа РС4АТВ) для подключения соединительного экранированного кабеля для связи с электронным модулем. Для герметичности все внутренние пустоты корпусов 5 катушек индуктивности К1 и К2 залиты силиконовым компаундом. Корпуса 5 катушек индуктивности К1 и К2 прикреплены к кронштейну 3 параллельно друг другу на расстоянии 40±10 мм между собой (фиг. 1 и 4). Сердечники катушек индуктивности К1 и К2 обращены навстречу друг другу. Кронштейн 3, конструкция которого позволяет обеспечить величину воздушного зазора не менее 5 мм, закреплен на корпусе контролируемого объекта (фиг. 3), в частности на фланце 7, так, чтобы оси сердечников катушек индуктивности К1 и К2 были расположены перпендикулярно плоскости лопастного диска (его радиусу).
Лопастной диск 2 (фиг. 3) выполнен из магнитной углеродистой стали и представляет собой механически обработанную, точно отбалансированную деталь. Лопастной диск 2 жестко установлен на ведущем валу 8 двигателя с возможностью прохождения лопастей диска 2 в середине воздушного зазора между катушками индуктивности К1 и К2 при вращении вала 8 двигателя. Диаметр лопастного диска 2 выбран конструктивно исходя из удобства монтажа, обслуживания и минимизации массы. Лопастной диск 2 имеет впадины, количество и размеры которых зависят от его внешнего диаметра и условия полного перекрывания лопастями диска потока магнитного поля между катушками индуктивных датчиков при вращении вала. Например, при диаметре 740 мм лопастной диск 2 имеет восемь впадин, а при диаметре 370 мм лопастной диск 2 имеет четыре впадины.
Между внешними поверхностями лопастей диска 2 и катушками индуктивности К1 и К2 конструктивно обеспечены воздушные зазоры величиной, по крайней мере, не менее 5 мм.
Связь между индуктивными датчиками 1 и электронным модулем осуществлена через приемные и передающие соединительные экранированные кабели, которые представляют собой экранированные витые пары с разъемами для подключения и устойчивы к воздействию электромагнитных помех. Используются экранированные кабели, рекомендованные для применения на АЭС в условиях повышенной радиационной опасности.
Система бесконтактного измерения частоты вращения работает следующим образом.
На катушки индуктивности К1 каждого индуктивного датчика 1 (передающую катушку) подают опорный синусоидальный сигнал с амплитудой напряжения 5 В и частотой 10 кГц, а с катушки индуктивности К2 (приемной катушки) снимают выходной сигнал 500 мВ той же частоты, изменения огибающей которой пропорциональна скорости вращения ротора (фиг. 4). Частота 10 кГц выбрана для получения максимального выходного сигнала для данного количества (около 600) витков намотки катушки.
В исходном состоянии ведущий вал 8 двигателя ГЦНА неподвижен, соответственно лопастной диск 2, установленный на валу двигателя, неподвижен, при этом опорный сигнал, подаваемый на катушки индуктивности К1, возбуждает в них переменное магнитное поле. Если в этот момент между катушками индуктивности К1 и К2 одного из индуктивного датчика 1 находится лопасть диска 2, то сигнал уменьшается до минимума. Если впадина лопастного диска 2 - то переменное магнитное поле индуцирует в катушке индуктивности К2 ЭДС и на выходе получается непрерывный сигнал (фиг. 5а), который по соединительному экранированному кабелю передается на электронный модуль.
При запуске двигателя его ротор с жестко закрепленным лопастным диском 2 начинают вращаться и магнитное поле опорного сигнала катушки индуктивности К1 прерывается лопастями диска 2 пропорционально частоте вращения. Соответственно и выходной сигнал катушки индуктивности К2 тоже будет изменяться пропорционально частоте вращения ротора. Таким образом, в каждом индуктивном датчике 1 при прохождении между катушками индуктивности К1 и К2 лопастей диска 2 изменяется амплитуда выходного сигнала с частотой пропорциональной скорости вращения лопастей. Электронный модуль вычисляет скорость вращения ротора, выделив частоту огибающей сигнала.
Принцип работы индуктивного датчика 1 основан на изменении коэффициента трансформации при пересечении воздушного зазора между катушками индуктивности К1 и К2 лопастями диска 2, жестко установленного на вращающемся ведущем валу 8. На выходе приемной катушки индуктивности К2 индуктивного датчика 1 получают амплитудно-модулированный сигнал с частотой, которая пропорциональна скорости вращения двигателя насоса.
В результате разработки и испытаний опытных образцов получены положительные результаты, в частности, с восьмилопастным диском и предпочтительным расстоянием между катушками индуктивности 40 мм. Экспериментально установлено, что датчик частоты вращения надежно работает в диапазоне модулирующих частот 1÷300 Гц.
По результатам испытаний на стенде данная конструкция обеспечивает необходимую точность измерения. В циклограммах (фиг. 5) работы системы на экране осциллографа показано как амплитуда выходного напряжения меняется по синусоиде на переходных и установившемся режимах работы ротора двигателя, где минимумы и есть момент перекрытия сердечников катушек лопастями диска (индуктивность катушки имеет максимальное значение), а максимумы соответственно впадинами лопастного диска (индуктивность катушки достигает своего минимума).
Проведенные испытания свидетельствуют о том, что система работоспособна, технический результат достижим и поставленная задача выполнима.
Таким образом, система бесконтактного измерения частоты вращения обладает достаточной чувствительностью, что позволяет применять ее для измерений при малых оборотах, а это важно при пуске насоса для формирования диагностической информации о его состоянии. К тому же позволяет работать с увеличенным воздушным зазором между подвижной и неподвижной частями системы, что также повышает эксплуатационную надежность, а применение лопастного диска из магнитной углеродистой стали, катушек индуктивности из радиационно стойких материалов в герметичных корпусах и экранированных кабелей позволяет исключить воздействие радиационного фона на работу системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| ТАХОМЕТР ЧАСТОТНЫЙ ЯЛОВЕГИ | 2004 |
|
RU2258228C1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Индукционный измеритель положения вращающегося вала | 2019 |
|
RU2704672C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЙ, ВОЗНИКАЮЩИХ В ЭЛЕКТРОУСТАНОВКАХ | 2023 |
|
RU2829713C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Устройство для обнаружения зон с неоднородными физическими свойствами в изделиях из металлопроката | 2021 |
|
RU2767939C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2034300C1 |




Изобретение относится к области автоматики и измерительной техники и может быть использовано для бесконтактного измерения частоты вращения вращающихся объектов. Система бесконтактного измерения частоты вращения содержит жестко установленный на вал контролируемого объекта лопастной диск, выполненный из магнитной углеродистой стали и представляющий собой точно отбалансированную деталь; как минимум, четыре индуктивных датчика; электронный модуль и соединенные экранированные кабели с разъемами, при этом каждый индуктивный датчик выполнен в виде двух катушек индуктивности, корпуса которых смонтированы на кронштейне, закрепленном на фланце корпуса контролируемого объекта параллельно друг другу с возможностью прохождения лопастного диска между катушками индуктивности при вращении вала, причем лопастной диск имеет впадины, количество и размеры которых зависят от его внешнего диаметра и условия полного перекрывания потока магнитного поля лопастями диска при вращении вала, а величина зазора между внешними поверхностями лопастей диска и катушками индуктивности, по крайней мере, не менее 5 мм. Технический результат – повышение чувствительности системы. 5 ил.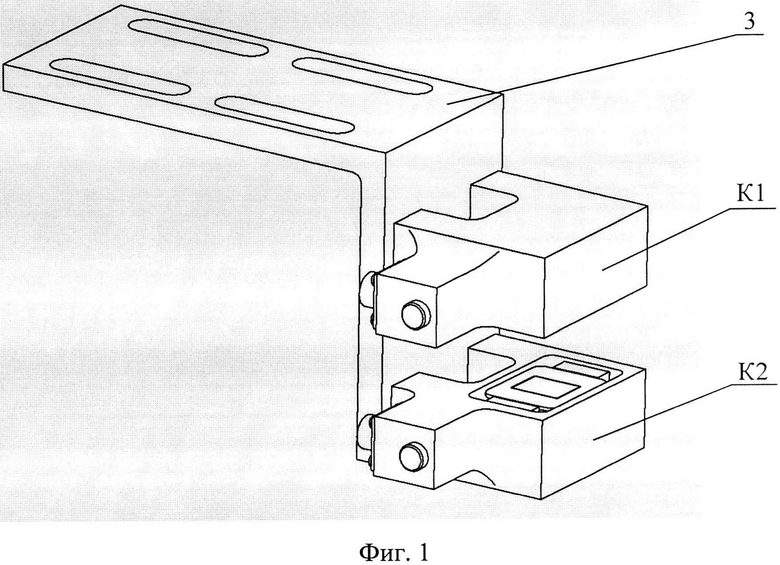
Система бесконтактного измерения частоты вращения, характеризующаяся тем, что включает жестко установленный на вал контролируемого объекта лопастной диск, выполненный из магнитной углеродистой стали и представляющий собой точно отбалансированную деталь; как минимум, четыре индуктивных датчика; электронный модуль и соединенные экранированные кабели с разъемами, при этом каждый индуктивный датчик выполнен в виде двух катушек индуктивности, корпуса которых смонтированы на кронштейне, закрепленном на фланце корпуса контролируемого объекта параллельно друг другу с возможностью прохождения лопастного диска между катушками индуктивности при вращении вала, причем лопастной диск имеет впадины, количество и размеры которых зависят от его внешнего диаметра и условия полного перекрывания потока магнитного поля лопастями диска при вращении вала, а величина зазора между внешними поверхностями лопастей диска и катушками индуктивности, по крайней мере, не менее 5 мм.
| US 4156192 A1, 22.05.1979 | |||
| US 4482859 A1, 13.11.1984 | |||
| Способ оптического увеличения размеров изображения на рентгеновском экране | 1960 |
|
SU135180A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| RU 2013122814 А, 27.11.2014. | |||

