Область техники, к которой относится изобретение
Изобретение относится к области железнодорожного транспорта и может быть использовано преимущественно в тормозных системах оснащенного электропневматическими тормозами железнодорожного подвижного состава.
Уровень техники
Известен автоматический фиксатор штока тормозного цилиндра в положении торможения, содержащий пневматический цилиндр и сообщенное с тормозной магистралью через пневматический замедлитель стопорное устройство, работу которого обеспечивают разрядкой тормозной магистрали, а прекращение его работы осуществляют выполнением процедуры последующей зарядки тормозной магистрали и запасного резервуара, уровень давления в котором предопределяет включение пневматического замедлителя /1/.
Недостатком реализуемого в известном автоматическом фиксаторе штока тормозного цилиндра способа его работы является спонтанное выключение стопорного устройства по мере повышения уровня давления сжатого воздуха в запасном резервуаре при выполнении указанной процедуры последующей его зарядки, чем исключается гарантированность закрепления подвижной единицы в этот период.
Известен также тормоз тележки рельсового экипажа, включающий в себя параллельно устанавливаемый основному дополнительный цилиндр с пружиной сжатия. Закрепление тележки рельсового экипажа от самопроизвольного движения осуществляется за счет воздействия усилия упомянутой пружины на его рычажную передачу уровня давления в запасном резервуаре при разрядке тормозной магистрали, а раскрепление экипажа осуществляется выполнением процедуры последующей зарядки тормозной магистрали и запасного резервуара, уровень давления которого нейтрализует усилие упомянутой пружины /2/.
Недостатками используемого в известном тормозе тележки рельсового экипажа способа работы его дополнительного цилиндра с пружиной сжатия являются: во-первых, пониженная величина сохраняемого затормаживающего усилия, которое ограничивается остаточным после разрядки тормозной магистрали пониженным уровнем давления сжатого воздуха в запасном резервуаре, параллельно расходуемым на штатное действие автотормоза; во-вторых, спонтанное снижение усилия упомянутой пружины по мере повышения уровня давления сжатого воздуха в запасном резервуаре в процессе осуществления указанной процедуры раскрепления исключает гарантированность закрепления подвижной единицы в этот период.
Наиболее близким является реализуемый в известном способе прекращения действия автоматического стояночного тормоза железнодорожного подвижного состава и устройстве для его реализации с целью предупреждения опасных последствий истощения тормозной магистрали /3/ способ закрепления и раскрепления истощенного автотормоза, содержащего управляющую, исполнительную и механические части. Этот способ закрепления и раскрепления железнодорожного подвижного состава обеспечивают действием задающего и фиксирующего комплексов автоматического стояночного тормоза.
Достигают этого заклиниванием фиксирующего комплекса, действующего на задающий комплекс, как при разрядке ниже предельно допустимого при полном служебном торможении тормозной магистрали, так и воздействующим также на задающий комплекс усилием упругой деформации механической части автотормоза. При этом в ситуации истощения автотормоза достигают усиления заклинивания фиксирующего комплекса дополнительным воздействием на задающий комплекс усилия упругой деформации механической части автотормоза. Причем возможность нейтрализации указанного дополнительного воздействия для дистанционного прекращения действия автоматического стояночного тормоза работой его задающего комплекса при заряженном автотормозе достигают созданием в исполнительной части автотормоза надлежащего уровня давления сжатого воздуха. Упомянутый надлежащий уровень обеспечивают выполнением полного служебного торможения управляющей части автотормоза.
Недостатком использующегося известного способа предупреждения опасных последствий истощения автотормоза, например, при его использовании на электропоездах является упомянутая процедура нейтрализации, вызывающая затраты времени на свое выполнение. Это обстоятельство из-за возможности частых разрядок тормозной магистрали в результате срыва стоп-крана приводит к накопленной задержке выполнения графика движения, которая может достигать существенного значения.
Сущность изобретения
Целью предложенного способа работы автоматического стояночного тормоза является обеспечение на подвижном составе, оснащенном электропневматическими тормозами, как надлежащее закрепление его подвижных единиц с обеспечением управляемости процесса процедуры раскрепления, так и исключение необходимости выполнения этой процедуры в ситуации разрядки тормозной магистрали при срыве стоп-крана.
Поставленная цель достигается следующим.
Автоматический стояночный тормоз, содержащий, в числе прочего, фиксирующий и задающий комплексы, взаимодействием которых исключают возможность неуправляемого движения оснащенного электропневматическими тормозами железнодорожного подвижного состава в ситуации возникновения разрядки тормозной магистрали ниже уровня, предельно допустимого при полном служебном торможении автотормоза. Автотормоз включает в себя, в числе прочего, на каждой подвижной единице тормозную магистраль, воздухораспределитель с электровоздухораспределителем, запасный резервуар и воздействующий на тормозную рычажную передачу тормозной цилиндр. В число основных компонентов, упомянутого фиксирующего комплекса вводят навинченную на винт с нетормозящейся резьбой свободно вращающуюся на подшипнике гайку и стакан, взаимодействием которых между собой, с образованием пар «винт-гайка» и «гайка-стакан», обеспечивают возникновение зазора между гайкой и стаканом, либо образование их конусного фрикционного зацепления. В упомянутый задающий комплекс вводят, в числе прочего, связанный с гайкой фиксирующего узла поршень сервоцилиндра, на который воздействуют встречно направленные усилия от уровня, поступающего в его рабочую полость давления сжатого воздуха тормозной магистрали, и от включающей пружины. Причем указанные опасные последствия истощения автотормоза предупреждают смещением под воздействием усилия включающей пружины поршня сервоцилиндра упомянутого задающего комплекса, осуществляющего введение в конусное фрикционное зацепление гайки со стаканом, чем достигают заклинивания одновременно связанного с тормозной рычажной передачей винта в упомянутом фиксирующем комплексе. При этом в ситуации истощения автотормоза достигают существенного увеличения усилия, действующего в конусном фрикционном зацеплении гайки со стаканом, за счет дополнительного воздействия возникшего в период работы автотормоза при разрядке тормозной магистрали усилия упругой деформации тормозной рычажной передачи, передающегося в это зацепление через винт. А возможность дистанционной нейтрализации указанного дополнительного воздействия обеспечивают выполнением процедуры ее нейтрализации, заключающейся в последующем создании в тормозном цилиндре надлежащего уровня давления сжатого воздуха, которого достигают выполнением полного служебного торможения заряженного автотормоза. Заявляемый способ работы автоматического стояночного тормоза отличается тем, что в число обеспечивающих работу задающего комплекса компонентов дополнительно вводят переключательный клапан, электропневматический вентиль, технологический разобщительный кран и тумблер, с помощью которого отключают электропитание катушки электропневматического вентиля. При этом выход переключательного клапана связывают с задающим комплексом, чем достигают возможности его сообщения как с тормозной магистралью через один из входов переключательного клапана, так и с запасным резервуаром через второй вход переключательного клапана, электропневматический вентиль и технологический разобщительный кран. А включение электропневматического вентиля исполняют возбуждением его катушки через замыкающий контакт упомянутого тумблера на головном вагоне электропоезда или пассажирском локомотиве от участка их штатной электрической цепи управления режимом тяги при срабатывании электропневматического клапана автостопа.
Заявляемое техническое решение соответствует критерию изобретения «Новизна» (N). Так, сопоставительный анализ заявляемого решения с известными показывает отличия, заключающиеся в том, что:
1) В число компонентов, обеспечивающих функционирование задающего комплекса автоматического стояночного тормоза, вводят переключательный клапан, электропневматический вентиль, технологический разобщительный кран и тумблер.
2) Задающий комплекс сообщают с тормозной магистралью через выход переключательного клапана и один из его входов.
3) Одновременно обеспечивают возможность сообщения задающего комплекса с запасным резервуаром через второй вход переключательного клапана, электропневматический вентиль и технологический разобщительный кран.
4) Включение электропневматического вентиля осуществляют возбуждением его катушки через замыкающий контакт тумблера отключения ее электропитания.
5) Тумблер отключения электропитания катушки электропневматического вентиля подключают на головном вагоне электропоезда или пассажирском локомотиве к участку их штатной электрической цепи управления режимом тяги при срабатывании электропневматического клапана автостопа.
Заявляемое техническое решение соответствует критерию «Изобретательский уровень (IS). Так, сравнение заявляемого решения с известными в технике решениями показывает, что введение переключательных клапанов, электропневматических вентилей, разобщительных кранов и тумблеров и различные схемы их подключения широко известны. Однако их внедрение в число компонентов, обеспечивающих действие автоматического стояночного тормоза, проявляет следующие новые свойства.
1. Не требуется осуществление процедуры дистанционной нейтрализации дополнительного воздействия на задающий и фиксирующий комплексы усилий упругой деформации тормозных рычажных передач в ситуации разрядки тормозной магистрали, вызванной срывом стоп-крана и нормируемого выполнения экстренного торможения автотормоза с помощью крана машиниста.
При отсутствии заявляемого технического решения включение задающих комплексов, обеспечивающих работу автоматических стояночных тормозов, происходит в момент снижения уровня давления в тормозной магистрали ниже уровня, максимально допустимого при полном служебном торможении автотормоза. Этот уровень нормируется не ниже 0,32-0,35 МПа (3,2-3,5 кгс/см2) /4, стр.68 - абз.2 и стр.69 - абз.1/.
Для исключения же при полных служебных торможениях ложного включения задающих комплексов (с учетом утечек по тормозной магистрали и возможности наличия перепада давлений между головным и хвостовым вагонами) их включение осуществляют при снижении уровня давления в тормозной магистрали ниже 0,22-0,25 МПа (2,2-2,5 кгс/см2). Вследствие этого разрядка тормозной магистрали ниже такого уровня и требует выполнения последующей процедуры дистанционной нейтрализации указанного дополнительного воздействия на задающий и фиксирующий комплексы усилий упругой деформации тормозной рычажной передачи.
При наличии же заявляемого технического решения включенное состояние электропневматических вентилей и открытое положение технологических разобщительных кранов в момент возникновения перепада давлений между запасными резервуарами (один из входов переключательных клапанов) и разряжаемой тормозной магистралью (противоположные входы переключательных клапанов) происходит штатный переброс поршней переключательных клапанов. Тем самым питание сжатым воздухом задающих комплексов начинает автоматически осуществляться от запасных резервуаров.
Поскольку уровень давления в запасных резервуарах в течение определенного промежутка времени (зависящего от утечек в тормозной сети их подвижных единиц) не снижается ниже указанного уровня включения задающих комплексов (0,22-0,25 МПа), постольку включение задающих комплексов не осуществляется.
Поэтому и не требуется последующего осуществления процедуры дистанционной нейтрализации указанного дополнительного воздействия на задающий и фиксирующий комплексы усилий упругой деформации в ситуации разрядки тормозной магистрали из-за срыва стоп-крана.
В результате затраты времени на ее осуществление отсутствуют и тем самым задержки выполнения графика движения по этой причине не имеют места.
2. В ситуации разрядки тормозной магистрали из-за разрыва поезда, оторвавшаяся часть поезда надежно закрепляется работой автоматических стояночных тормозов вне зависимости от включенного состояния электропневматических вентилей и открытого положения технологических разобщительных кранов.
В такой ситуации, как известно, происходит и одновременный разрыв кабелей межвагонных соединений, что вызывает прекращение электропитания катушек электропневматических вентилей и их отключение на вагонах оторвавшейся части поезда.
Этим исключается возможность осуществления автоматического питания сжатым воздухом задающих комплексов от запасных резервуаров и имеет место включение задающих комплексов.
В результате вагоны оторвавшейся части поезда будут надежно закреплены от самопроизвольного движения работой автоматических стояночных тормозов.
3. В ситуации разрядки тормозной магистрали из-за срабатывания электропневматического клапана автостопа поезд надежно закрепляется работой автоматических стояночных тормозов вне зависимости от включенного состояния электропневматических вентилей и открытого положения технологических разобщительных кранов.
Поскольку срабатывание электропневматического клапана автостопа потенциально может иметь место в случае неспособности машиниста к управлению, постольку в такой ситуации необходимо гарантированное закрепление поезда от самопроизвольного движения.
Обеспечивается это прерыванием цепи электропитания катушек электропневматических вентилей, подключаемой на головном вагоне электропоезда или пассажирского локомотива к участку их штатной электрической цепи управления режимом тяги, которая при срабатывании электропневматического клапана автостопа обесточивается.
В свою очередь, прерывание цепи электропитания катушек электропневматических вентилей вызывает их отключение, чем исключается возможность осуществления автоматического питания сжатым воздухом задающих комплексов от запасных резервуаров.
В результате осуществляется включение задающих комплексов, что обеспечивает работу автоматических стояночных тормозов и надежное закрепление поезда от самопроизвольного движения.
4. В ситуации разрядки тормозной магистрали, вызванной необходимостью осуществлении процесса перехода на управление из другой кабины пассажирского тягового средства, поезд надежно закрепляется работой автоматических стояночных тормозов вне зависимости от включенного состояния электропневматических вентилей и открытого положения технологических разобщительных кранов.
При осуществлении такого процесса необходимо гарантированное закрепление поезда от самопроизвольного движения, т.к. на сам процесс может затрачиваться время, соизмеримое с нормируемым временем на штатно допустимые утечки сжатого воздуха из тормозной сети поезда.
Обеспечивается это прерыванием цепи электропитания катушек электропневматических вентилей, которая подключается на головном вагоне электропоезда или пассажирского локомотива к участку их штатной электрической цепи управления, которая нормировано отключается в покидаемой кабине.
В результате исключается возможность осуществления автоматического питания сжатым воздухом задающих комплексов от запасных резервуаров. Поэтому задающие комплексы включаются, вызывая работу автоматических стояночных тормозов и надежное закрепление поезда от самопроизвольного движения.
5. Прекращение работы заявляемого технического решения может быть осуществлено дистанционно в любой момент с помощью тумблера отключения электропитания катушек электропневматических вентилей.
Этим исключается возможность осуществления автоматического питания сжатым воздухом задающих комплексов от запасных резервуаров. Поэтому задающие комплексы включаются в работу.
В результате при всех последующих разрядках тормозной магистрали соответствующим темпом ниже уровня, максимально допустимого, при полном служебном торможении автотормоза, в том числе и в ситуации срыва стоп-крана, поезд будет надежно закреплен работой автоматических стояночных тормозов от самопроизвольного движения.
6. Прекращение работы заявляемого технического решения может быть осуществлено автономно - на каждой подвижной единице - осуществлением перекрытия технологических разобщительных кранов.
Этим также исключается возможность осуществления автоматического питания сжатым воздухом задающих комплексов от запасных резервуаров. Поэтому задающие комплексы также включатся в работу.
В результате также при всех разрядках тормозной магистрали соответствующим темпом ниже уровня, максимально допустимого, при полном служебном торможении автотормоза, в том числе и в ситуации срыва стоп-крана, поезд будет надежно закреплен работой автоматических стояночных тормозов от самопроизвольного движения.
Заявляемое техническое решение соответствует критерию «Промышленная применимость» (IA), так как его реализации достигают соответствующим введением в число компонентов, обеспечивающих на каждой единице пассажирского подвижного состава включение задающего комплекса автоматического стояночного тормоза: технологического разобщительного крана, переключательного клапана и электропневматического вентиля, электропитание катушек которых осуществляют через устанавливаемый на головных вагонах электропоездов и на пассажирских локомотивах тумблер, который подключают к участку их штатной электрической цепи управления режимом тяги при срабатывании электропневматического клапана автостопа.
Перечень фигур чертежей
Изобретение поясняется схемами, иллюстрирующими предлагаемый способ работы автоматического стояночного тормоза.
На ФИГ.1 представлены упрощенные принципиальные пневматическая (фрагмент а)) и электрическая (фрагмент б)) схемы включения дополнительно вводимых в число компонентов задающего комплекса, обеспечивающие, в качестве примера, реализацию заявляемого технического решения на электропоезде.
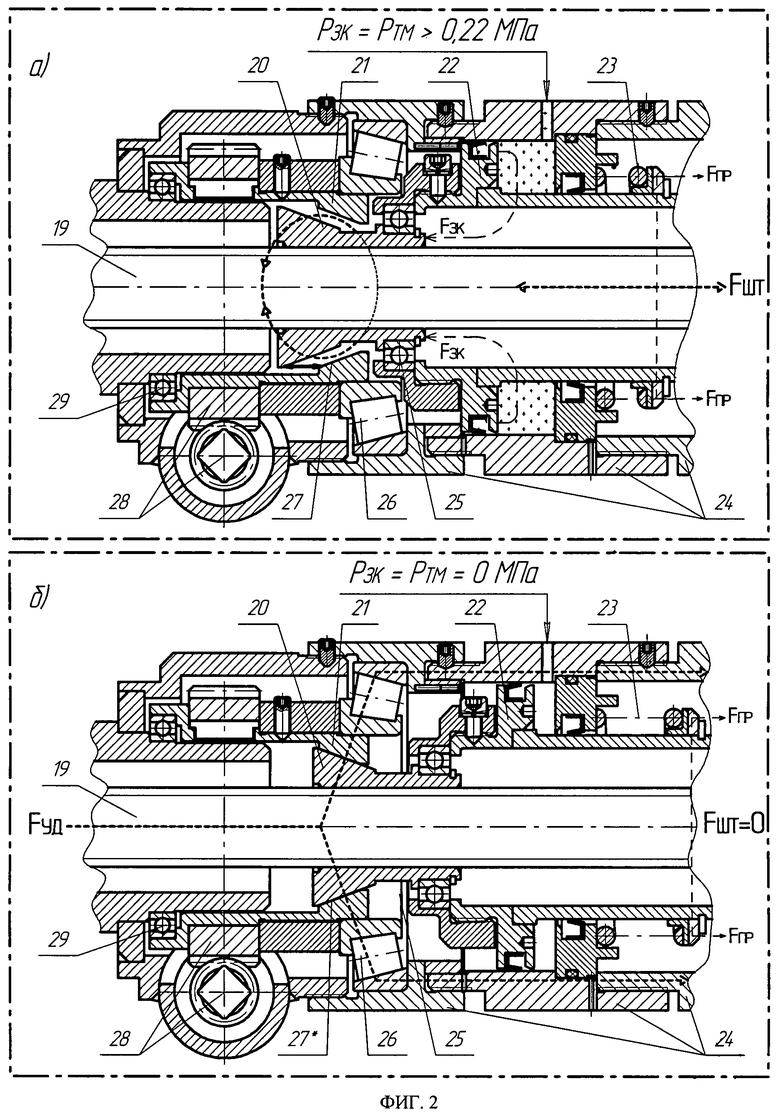
На ФИГ.2 представлена схема, иллюстрирующая существующее при торможениях автотормоза функционирование задающего комплекса в ситуациях, когда остаточный уровень давления тормозной магистрали превышает (фрагмент а)), либо оказывается ниже (фрагмент б)) порога его включения.
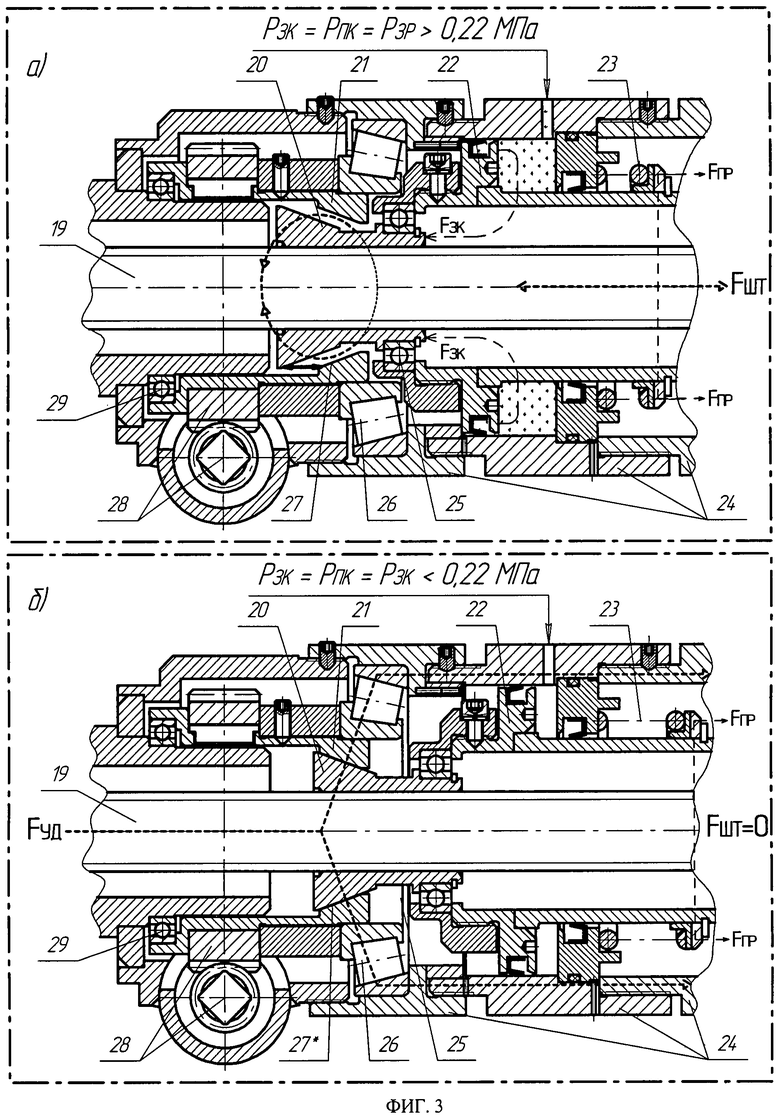
На ФИГ.3 представлена схема, иллюстрирующая работу заявляемого технического решения при торможениях автотормоза, функционирование задающего комплекса в ситуациях, когда уровень давления на выходе переключательного клапана превышает (фрагмент а)), либо оказывается ниже (фрагмент б)) порога его включения.
Указанные на ФИГ.1 схемы содержат штатные основные компоненты автотормоза и автоматического стояночного тормоза, включающие в себя:
- на фрагменте а) - воздухопровод 2 к задающему комплексу автоматического стояночного тормоза, отросток 3 воздухопровода к воздухораспределителю с электровоздухораспределителем, сообщенный через разобщительный кран 4 с отростком воздухопровода к тормозной магистрали 5 и дополнительный разобщительный кран 6, через который воздухопровод 2 сообщается с отростком воздухопровода к тормозной магистрали 5;
- на фрагменте б) - минусовой провод 11 аккумуляторной батареи головного вагона электропоезда, провод 12 от контроллера машиниста, размыкающий контакт электропневматического клапана автостопа 13, провод участка штатной электрической цепи управления отключением режима тяги 14, головной 16, промежуточные 17 и хвостовой 18 вагоны электропоезда.
Кроме того на представленных на ФИГ.1 схемах показаны дополнительные компоненты, обеспечивающие реализацию заявляемого технического решения:
- на фрагменте а) - воздухопровод 1 к запасному резервуару, сообщенный через технологический разобщительный кран 9, электропневматический вентиль 8 с одним из входов переключательного клапана 7, второй вход которого сообщен с дополнительным разобщительным краном 6, а к выходу переключательного клапана 7 подключен воздухопровод 2 к задающему комплексу автоматического стояночного тормоза;
- на фрагменте б) - катушки электропневматических вентилей 8, провод 15 их электропитания и замыкающий контакт тумблера 10 отключения его электропитания.
В схемах, представленных на ФИГ.2 и ФИГ.3, иллюстрируется работа автоматического стояночного тормоза, включающего в себя фиксирующий, задающий и ручного привода комплексы, которые размещены во втулках 23, объединенных в общий корпус. Фиксирующий комплекс содержит: винт 19, свободно вращающуюся на подшипнике 25 гайку 20 и стакан 21, которые образуют пару «винт-гайка» с нетормозящейся резьбой и возникновение зазора 27, либо конусного фрикционного зацепления 27* пары «гайка-стакан». Задающий комплекс содержит: взаимодействующий с гайкой 20 поршень 22, на который воздействуют встречно направленные усилия от уровня, поступающего в его рабочую полость давления сжатого воздуха, и включающей пружины 23. Комплекс ручного привода состоит из червячной пары 28, при вращении червяка которой достигается вращение в подшипниках 26 и 29 стакана 21, жестоко закрепленного в колесе червяной пары. Кроме того, на ФИГ.2 и ФИГ.3 показаны действующие усилия: FЗК - от поршня 21 задающего комплекса; FПР - от включающий пружины 22 задающего комплекса; FУД - от упругой деформации тормозной рычажной передачи (механической части автотормоза) и FШТ- - от штока тормозного цилиндра. Помимо этого показаны уровни воздействующего на поршень 21 задающего комплекса давления сжатого воздуха - PЗК от: тормозной магистрали - PТМ, запасного резервуара - PЗР и выхода переключательного клапана - PПК.
На указанных на ФИГ.1 фрагментах а) и б) показаны:
- тонкими линиями - штатные основные компоненты и воздухопроводы принципиальной пневматической схемы автотормоза и автоматического стояночного тормоза и штатные аппараты и цепи принципиальной электрической схемы цепей управления подвижного состава, оснащенного электропневматическим тормозом;
- утолщенными линиями - обеспечивающие реализацию заявляемого технического решения дополнительные компоненты и воздухопроводы, вводимые в принципиальную пневматическую схему автоматического стояночного тормоза и дополнительные аппараты и цепи, вводимые в принципиальную электрическую схему цепей управления подвижного состава, оснащенного электропневматическим тормозом.
Сведения, подтверждающие возможность осуществления изобретения
При реализации служебных торможений автотормоза в существующей схеме работы автоматического стояночного тормоза в ситуации расторможенного состояния тормозной рычажной передачи в любом случае сохраняется уровень давления в тормозной магистрали PТМ>0,22 МПа. Поэтому равный ему уровень действующего давления в рабочей полости поршня 22 задающего комплекса PЗК еще создает выключающее задающий комплекс усилие FЗК, которое оказывается достаточным для преодоления встречно действующего на поршень 22 усилия FПР включающей пружины 23. В итоге под воздействием разности усилий «FЗК-FПР» поршень 22 смещается влево (по ФИГ.2, фрагмент а)) и выталкивает гайку 20 в положение, при котором образуется зазор 27. В этих условиях фиксирующий комплекс бездействует, и автоматический стояночный тормоз находится в режиме «ожидание». Режим «ожидание» характеризуется тем, что гайка 20 может свободно вращаться на своем подшипнике 25 и при торможениях автотормоза навинчиваться на винт 19, а при отпусках автотормоза свинчиваться с винта 19, не препятствуя его смещениям под, воздействием усилия Fшт от штока тормозного цилиндра.
В ситуации экстренного торможения автотормоза (см. ФИГ.2, фрагмент 6)) имеет место снижение давления в тормозной магистрали до уровня PТМ<0,22 МПа. Поэтому равный ему уровень давления в рабочей полости поршня 22 задающего комплекса Рук создает значительно меньшее усилие FЗК, которое оказывается недостаточным для преодоления встречно действующего на поршень 22 усилия FПР включающей пружины 23. Поэтому под воздействием разности усилий «FПР- FЗК» поршень 22 смещается вправо (по ФИГ.2, фрагмент б)), чем достигается вжатие гайки 20 в конусное фрикционное зацепление 27* со стаканом 21, и гайка 20 теряет возможность свинчивания с винта 19. В таких условиях автоматический стояночный тормоз переходит в режим «действие», исключая возможность смещения винта 19 в сторону отпуска. По мере истощения рабочей полости тормозного цилиндра к увеличивающейся разности усилий «FПР-FЗК», вжавшей гайку 20 в конусное фрикционное зацепление 27* со стаканом 21, добавляется многократно превышающее усилие упругой деформации FУД от заторможенной тормозной рычажной передачи, которое было создано усилием Fшт, работой автотормоза в период осуществления его экстренного торможения. В результате происходит гарантированное заклинивание гайки 20 в ее конусном фрикционном зацеплении 27* со стаканом 21, чем обеспечивается надежность и работоспособность автоматического стояночного тормоза в режиме «действие» по закреплению подвижной единицы от самопроизвольного движения. Повышение давления в тормозной магистрали вплоть до нормируемого зарядного, уровень которого действует в рабочей полости поршня 22, создает на нем усилие, определяемое разностью усилий «FЗК-FПР». Но его оказывается недостаточно для выталкивания гайки 20 из конусного фрикционного зацепления 27* со стаканом 21, так как в нем продолжает действовать многократно превышающее и противоположно направленное усилие упругой деформации FУД, продолжающее вжимать гайку 20 в это зацепление. Для дистанционного прекращения режима «действие» автоматического стояночного тормоза необходимо предварительное выполнение процедуры нейтрализация сохраняемого усилия упругой деформации FУД. Такая нейтрализация достигается появлением в рабочей полости тормозного цилиндра уровня давления, соответствующего уровню давления, имевшему место при заклинивании гайки 20 в конусном фрикционном зацеплении 27* со стаканом. Появление в рабочей полости тормозного цилиндра такого уровня давления вызывает возникновение на штоке поршня тормозного цилиндра усилия Fшт, встречного и равного усилию FУД. Вызывающий возникновение усилия Fшт уровень давления на штоке поршня тормозного цилиндра обеспечивается выполнением полного служебного торможения полностью заряженного автотормоза. Только после этого наличествующий уровень давления сжатого воздуха в тормозной магистрали PТМ и равной ему рабочей полости поршня 22 PЗК создают разность усилий «PЗК-FПР» оказывается достаточной для выключения из работы задающего комплекса - выталкивания гайки 20 из конусного фрикционного зацепления 27* в положение, при котором возникает зазор 27 (см. ФИГ.2, фрагмент а)). Теперь, в условиях, когда автоматический стояночный тормоз возвратился из режима «действие» в режим «ожидание», последующий отпуск автотормоза позволяет осуществить дальнейшее движение.
В результате затраты времени на выполнение такой процедуры возвращения автоматического стояночного тормоза из режима «действие» в режим «ожидание» и последующий отпуск автотормоза из-за могущих возникать при эксплуатации электропоездов частых разрядок тормозной магистрали в результате срыва стоп-крана и приводят к накопленной задержке выполнения графика движения, которая может достигать существенного значения.
Реализация предлагаемого способа работы автоматического стояночного тормоза рассмотрена с использованием схем, представленных на ФИГ.1 и на ФИГ.3.
Ввод в работу заявляемого технического решения
Для ввода в работу заявляемого технического решения (после зарядки тормозной магистрали и включения электропневматического клапана автостопа) производят, в числе прочего, автономную проверку работоспособности автоматических стояночных тормозов.
Указанная проверка заключается в приведении автоматического стояночного тормоза в режим «действие», для чего при перекрытом технологическом кране 9 (см. ФИГ.1, фрагмент а)) осуществляется перекрытие разобщительного крана 4 и дополнительного разобщительного крана 6. Перекрытием разобщительного крана 4 достигается разрядка отростка 3 к воздухораспределителю (на ФИГ.1, фрагмент а) не показан), что вызывает его срабатывание на торможение и штатное смещение штока поршня тормозного цилиндра (а вместе с ним и винта 19 автоматического стояночного тормоза) с заторможением тормозной рычажной передачи (см. ФИГ.3, фрагмент б)). Перекрытием дополнительного разобщительного крана 6 (см. ФИГ.1, фрагмент а)) осуществляется выброс сжатого воздуха из рабочей полости поршня 22 (см. ФИГ.3, фрагмент б)) и переход автоматического стояночного тормоза в режим «действие». Затем воздействием на выпускной клапан запасного резервуара (на ФИГ.1, фрагмент а) не показан) необходимо убедиться в сохранении заторможенного состояния тормозной рычажной передачи режимом действие» автоматического стояночного тормоза при расторможенном автотормозе. После чего необходимо открыть разобщительный 4 и дополнительный разобщительный 6 краны и убедиться в сохраняющемся при зарядке автотормоза режиме «действие» автоматического стояночного тормоза. Выдержав необходимое время для зарядки автотормоза вновь вызвать его срабатывание перекрытием разобщительного крана 4, и выждав требуемое для наполнения тормозного цилиндра до нормируемого уровня, обеспечивающего нейтрализацию усилия FУД упругой деформации тормозной рычажной передачи для прекращения режима «действие» автоматического стояночного тормоза, выполнить отпуск автотормоза открытием разобщительного крана 4. По расторможению тормозной рычажной передачи убедиться в возвращении автоматического стояночного тормоза в режим «ожидание». После чего открыть технологический разобщительный кран 9. По завершении проверки работоспособности автоматических стояночных тормозов на всех вагонах осуществляется включение тумблера 9 (см. ФИГ. 1, фрагмент б)).
В результате достигается включение электропневматических вентилей 8 всех вагонов, чем обеспечивается возможность сообщения их задающих комплексов через переключательные клапаны 7 (см. ФИГ.1, фрагмент а)) как с тормозной магистралью, так и с запасными резервуарами, и заявляемое техническое решение готово к работе.
Работа заявляемого технического решения в ситуации разрядки тормозной магистрали при срыве стоп крапа.
Понижение давления в тормозной магистрали при срыве стоп-крана и последующем нормируемом осуществлении экстренного торможения приводит к возникновению перепада давлений между воздухопроводами 1 от запасных резервуаров PЗК и тормозной магистралью 5 PТМ. Это вызывает штатный переброс поршней переключательных клапанов 7 и питание рабочих полостей поршней 22 (см. ФИГ.3, фрагмент а)) давлением PЗР от запасных резервуаров. Поскольку при упомянутых торможениях уровень давления в запасных резервуарах определенный период времени (зависящий от утечек в тормозной сети электропоезда) не снижается ниже уровня включения задающих комплексов PЗК-вкл=0,22-0,25 МПа, постольку включение задающих комплексов не осуществляется, и автоматические стояночные тормоза остаются в режиме «ожидание». Поэтому после остановки и выяснения причин срыва стоп-крана последующее выполнение процедуры прекращения режима «действие» автоматических стояночных тормозов не требуется. В результате затраты времени на ее осуществление отсутствуют, и тем самым задержки выполнения графика движения электропоезда по этой причине не имеют места.
Работа заявляемого технического решения в ситуации разрядки тормозной магистрали из-за разрыва электропоезда.
В такой ситуации, как известно, происходит и одновременный разрыв кабелей межвагонных соединений электропоезда, что вызывает прекращение электропитания проводов 11 и 30 на вагонах его оторвавшейся части и отключение на них электропневматических вентилей 8 (см. ФИГ.1, фрагмент б)). В результате процесс замещения в рабочих полостях поршней 20 уровня давления от тормозной магистрали PТМ уровнем давления от запасного резервуара PЗР не будет иметь места. Это приведет к смещению поршней 20 вправо (по ФИГ.3, фрагмент б)), вводу гаек 20 в конусное фрикционное зацепление 27* со стаканом 21, вызывающему переход в режим «действие» автоматических стояночных тормозов вагонов оторвавшейся части, и они будут надежно закреплены от самопроизвольного движения.
Работа заявляемого технического решения в ситуации разрядки тормозной магистрали из-за срабатывания электропневматического клапана автостопа.
Поскольку срабатывание электропневматического клапана автостопа может иметь место в случае неспособности машиниста к управлению, постольку в такой ситуации необходимо гарантированное закрепление электропоезда от самопроизвольного движения. Обеспечивается это (см. ФИГ.1, фрагмент б)) прерыванием цепи электропитания катушек электропневматических вентилей 8, подключаемой на головном вагоне электропоезда к проводу 14, обесточиваемому размыкающимся (при срабатывании электропневматического клапана автостопа) контактом 13, чем одновременно достигается штатное осуществление отключения режима тяги. В свою очередь, такое прерывание цепи электропитания катушек электропневматических вентилей 8 также вызывает их отключение, чем исключается возможность осуществления автоматического питания сжатым воздухом рабочих полостей поршней 20 уровнем давления PЗР от запасных резервуаров. Это приведет к смещению поршней 20 вправо (по ФИГ.3, фрагмент б)), вводу гаек 20 в конусное фрикционное зацепление 27* со стаканом 21, вызывающему переход в режим «действие» автоматических стояночных тормозов вагонов электропоезда, чем обеспечится их надежное закрепление от самопроизвольного движения.
Работа заявляемого технического решения в ситуации разрядки тормозной магистрали в ситуации перехода на управление из другой кабины электропоезда.
В процессе перехода на управление из другой кабины электропоезда, как известно, имеет место нормированная разрядка тормозной магистрали, и на сам процесс перехода может затрачиваться время, соизмеримое с нормируемым временем на штатно допустимые утечки сжатого воздуха из тормозной сети. Поэтому в такой ситуации требуется гарантированное закрепление электропоезда от самопроизвольного движения. Обеспечивается это (см. ФИГ.1, фрагмент б)) прерыванием цепи питания тумблера 10 и, следовательно, провода 15, подключаемого на головном вагоне электропоезда к участку его штатной электрической цепи управления, которая, в свою очередь, нормировано отключается в покидаемой кабине. Вызванное таким отключением прерывание цепи электропитания катушек электропневматических вентилей 8 также вызывает их отключение, чем исключается возможность осуществления автоматического питания сжатым воздухом рабочих полостей поршней 20 PЗК уровнем давления PЗР от запасных резервуаров. Это также приведет к смещению поршней 20 вправо (по ФИГ.3, фрагмент б)), вводу гаек 20 в конусное фрикционное зацепление 27* со стаканом 21, вызывающему переход в режим «действие» автоматических стояночных тормозов вагонов электропоезда, чем обеспечивается его надежное закрепление от самопроизвольного движения.
Дистанционное прекращение работы заявляемого технического решения.
Дистанционное прекращение работы заявляемого технического решения может быть осуществлено в любой момент отключением тумблера 10, замыкающий контакт которого прерывает электропитание провода 15. Вызванное таким прерыванием электропитания провода 15 приведет и к прерыванию цепи электропитания катушек электропневматических вентилей 8 и также вызывает их отключение, чем исключается возможность осуществления автоматического питания сжатым воздухом рабочих полостей поршней 20 уровнем давления PЗР от запасных резервуаров, но сохраняется возможность питания этих полостей уровнем давления PТМ от тормозной магистрали. В итоге переход в режим «действие» автоматических стояночных тормозов на всем электропоезде будет определяться только уровнем давления PТМ в тормозной магистрали, что потребует штатной процедуры для прекращения указанного режима.
Автономное прекращение работы заявляемого технического решения.
Автономное прекращение работы заявляемого технического решения может быть осуществлено на вагоне в любой момент перекрытием технологического крана 9. Таким перекрытием исключается возможность осуществления автоматического питания сжатым воздухом рабочей полости поршня 20 PЗК уровнем давления PЗР от запасного резервуара, но сохраняется возможность питания этой полости уровнем давления PТМ от тормозной магистрали. В итоге переход в режим «действие» автоматического стояночного тормоза на этом вагоне будет определяться только уровнем давления в тормозной магистрали, что потребует штатной процедуры для прекращения указанного режима.
Технические результаты, получаемые при использовании предлагаемого способа работы автоматического стояночного тормоза
Использованием предлагаемого способа работы автоматического стояночного тормоза на железнодорожном подвижном составе, оснащенном электропневматическими тормозами, обеспечивают его надежное автоматическое закрепление от самопроизвольного движения при возникновении опасности истощения автотормозов при разрядке тормозной магистрали в ситуациях разрыва поезда, срабатывания электропневматического клапана автостопа и перехода на управление из другой кабины.
В то же время предупреждают возможность режима «действие» автоматических стояночных тормозов при разрядках тормозной магистрали, вызванных срывом стоп-крана. В результате для возможности дальнейшего следования такого подвижного состава не требуется осуществления процедуры прекращения режима «действия» его автоматических стояночных тормозов.
В результате достигают совершенствования технологии эксплуатационной работы такого подвижного состава за счет возможности исключения дополнительных затрат времени на осуществление указанной процедуры и тем самым задержек выполнения графика движения по этой причине.
Возможность осуществления изобретения
Возможность осуществления предложенного способа работы автоматического стояночного тормоза обеспечивают тем, что используют в качестве вводимых:
1) в пневматическую схему тормоза подвижных единиц дополнительно компонентов, могут использоваться:
- в качестве переключательного клапана, например, клапан переключательный 3 ПК /5, стр.138/;
- в качестве электропневматического вентиля, например, вентиль электропневматический 120 (включающий) /5, стр.147/;
- в качестве технологического разобщительного крана, например, кран шаровой разобщительный 4333А /5, стр.100/;
2) в электрическую схему цепей управления головного вагона электропоезда или пассажирского локомотива дополнительных компонентов, может использоваться в качестве тумблера цепи электропитания электропневматических вентилей, например тумблер ПТ-26-1 /6, стр.36/.
Список использованных источников
1. Автоматический фиксатор штока тормозного цилиндра в положении торможения. Авторское свидетельство СССР №255340, Бюл. №33, 26.08.1968.
2. Тормоз тележки рельсового экипажа. Патент РФ №2255872 С1, Бюл. №19, 10.07.2005.
3. Способ прекращения действия автоматического стояночного тормоза железнодорожного подвижного состава и устройство для его реализации. Патент РФ №2302954 С1, Бюл. №20, 20.07.2007.
4. Иноземцев В.Г. Тормоза железнодорожного подвижного состава: Вопросы и ответы. - 3-е изд., стереотипное - М.: Транспорт, 1987.
5. Автотормозное и пневматическое оборудование подвижного состава рельсового транспорта: Каталог комплектующего оборудования, ч.1 и ч.2. - Ассоциация «ACTQ», 2007.
6. Руководство по устройству электропоездов серии ЭД9М, ЭД9Т, ЭР9П. М: Центр Коммерческих Разработок, 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАТОРМОЖЕНИЯ АВТОТОРМОЗА | 2011 |
|
RU2473436C1 |
| СПОСОБ ПРЕКРАЩЕНИЯ ДЕЙСТВИЯ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2302954C1 |
| ТОРМОЗНАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНОГО ТЯГОВОГО СРЕДСТВА | 1994 |
|
RU2100231C1 |
| СПОСОБ ПОВЫШЕНИЯ РАБОТОСПОСОБНОСТИ СТОЯНОЧНОГО ТОРМОЗА ПНЕВМОПРУЖИННОГО ТИПА | 2012 |
|
RU2511576C2 |
| СПОСОБ ПОВЫШЕНИЯ РАБОТОСПОСОБНОСТИ АВТОТОРМОЗА | 2012 |
|
RU2511736C1 |
| СПОСОБ ДЕЙСТВИЯ СТОЯНОЧНОГО ТОРМОЗА | 2011 |
|
RU2457126C1 |
| СПОСОБ ДЕЙСТВИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392141C1 |
| СПОСОБ БЛОКИРОВАНИЯ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2014 |
|
RU2553498C1 |
| ТОРМОЗНАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНОГО ТЯГОВОГО СРЕДСТВА | 1992 |
|
RU2020096C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
Изобретение относится к области железнодорожного транспорта и может быть использовано в тормозных системах железнодорожного подвижного состава. Способ работы автоматического стояночного тормоза заключается в исключении возможности неуправляемого движения оснащенного электропневматическими тормозами железнодорожного подвижного состава в ситуации возникновения разрядки тормозной магистрали ниже уровня, предельно допустимого при полном служебном торможении автотормоза, за счет фиксирующего и задающего комплексов. В число основных компонентов фиксирующего комплекса вводят навинченную на винт с нетормозящейся резьбой свободно вращающуюся на подшипнике гайку и стакан, взаимодействием которых обеспечивают возникновение зазора между гайкой и стаканом, либо образование их конусного фрикционного зацепления. В задающий комплекс вводят связанный с гайкой фиксирующего узла поршень сервоцилиндра, на который воздействуют встречно направленные усилия. В число обеспечивающих работу задающего комплекса компонентов дополнительно вводят переключательный клапан, электропневматический вентиль, технологический разобщительный кран и тумблер. Выход переключательного клапана связывают с задающим комплексом, чем достигают возможность его сообщения как с тормозной магистралью через один из входов переключательного клапана, так и с запасным резервуаром через второй вход переключательного клапана, электропневматический вентиль и технологический разобщительный кран. Достигается исключение задержек выполнения графика движения, вызванных срывом стоп-крана. 3 ил.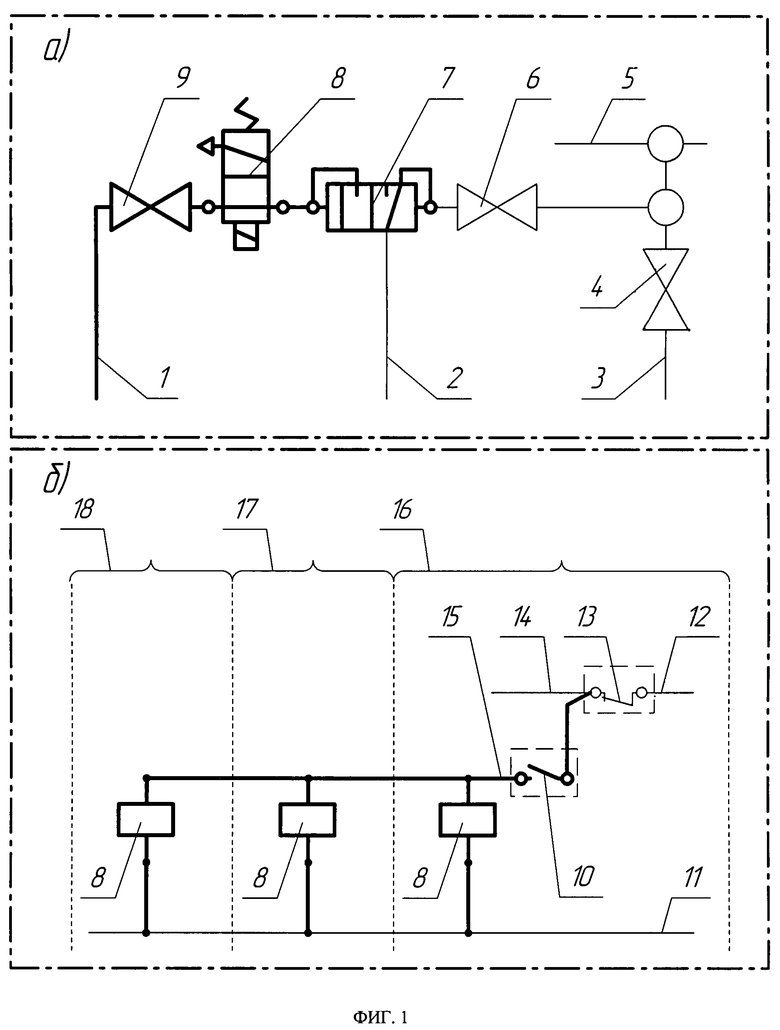
Способ работы автоматического стояночного тормоза, содержащего, в числе прочего, фиксирующий и задающий комплексы, взаимодействием которых исключают возможность неуправляемого движения оснащенного электропневматическими тормозами железнодорожного подвижного состава в ситуации возникновения разрядки тормозной магистрали ниже уровня, предельно допустимого при полном служебном торможении автотормоза, включающего в себя, в числе прочего, на каждой подвижной единице тормозную магистраль, воздухораспределитель с электровоздухораспределителем, запасный резервуар и воздействующий на тормозную рычажную передачу тормозной цилиндр, причем, в число основных компонентов упомянутого фиксирующего комплекса вводят навинченную на винт с нетормозящейся резьбой свободно вращающуюся на подшипнике гайку и стакан, взаимодействием которых между собой, с образованием пар «винт-гайка» и «гайка-стакан», обеспечивают возникновение зазора между гайкой и стаканом, либо образование их конусного фрикционного зацепления, а в упомянутый задающий комплекс вводят, в числе прочего, связанный с гайкой фиксирующего узла поршень сервоцилиндра, на который воздействуют встречно направленные усилия от уровня поступающего в его рабочую полость давления сжатого воздуха тормозной магистрали, и от включающей пружины, причем указанные опасные последствия истощения автотормоза предупреждают смещением под воздействием усилия включающей пружины поршня сервоцилиндра упомянутого задающего комплекса, осуществляющего введение в конусное фрикционное зацепление гайки со стаканом, чем достигают заклинивания одновременно связанного с тормозной рычажной передачей винта в упомянутом фиксирующем комплексе, при этом в ситуации истощения автотормоза достигают существенного увеличения усилия, действующего в конусном фрикционном зацеплении гайки со стаканом, за счет дополнительного воздействия возникшего в период работы автотормоза при разрядке тормозной магистрали усилия упругой деформации тормозной рычажной передачи, передающегося в это зацепление через винт, а возможность дистанционной нейтрализации указанного дополнительного воздействия обеспечивают выполнением процедуры ее нейтрализации, заключающейся в последующем создании в тормозном цилиндре надлежащего уровня давления сжатого воздуха, которого достигают выполнением полного служебного торможения заряженного автотормоза, отличающийся тем, что в число обеспечивающих работу задающего комплекса компонентов дополнительно вводят переключательный клапан, электропневматический вентиль, технологический разобщительный кран и тумблер, с помощью которого создают цепь электропитания катушки электропневматического вентиля, при этом выход переключательного клапана связывают с задающим комплексом, чем достигают возможность его сообщения как с тормозной магистралью через один из входов переключательного клапана, так и с запасным резервуаром через второй вход переключательного клапана, электропневматический вентиль и технологический разобщительный кран, а включение электропневматического вентиля исполняют возбуждением его катушки через замыкающий контакт упомянутого тумблера на головном вагоне электропоезда или пассажирском локомотиве от участка их штатной электрической цепи управления отключением режима тяги при срабатывании электропневматического клапана автостопа.
| СПОСОБ ПРЕКРАЩЕНИЯ ДЕЙСТВИЯ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2302954C1 |
| ТОРМОЗ ТЕЛЕЖКИ РЕЛЬСОВОГО ЭКИПАЖА | 2004 |
|
RU2255872C1 |
| DE 4235807 A1, 11.11.1993 | |||
| Крылов В.И | |||
| и др | |||
| Тормозное оборудование железнодорожного подвижного состава | |||
| Справочник | |||
| - М.: Транспорт, 1989, с.4-59 | |||
| DE 3809863 A1, 05.10.1989 | |||
| US 5651517 A, 29.07.1997 | |||
| US 4534453 А, 13.08.1985. | |||

